Fisica per Medicina
Lezione 3 - Momento angolare e momenti delle forze
Dr. Cristiano Fontana
Dipartimento di Fisica ed Astronomia “Galileo Galilei”
Università degli Studi di Padova
24 ottobre 2016
Momento angolare
Forze e momenti
2/24
Indice
Momento angolare
Forze e momenti
3/24
Centro di massa
Figura: Galassia NGC 1300 [wiki].
r1⃗
4/24
ri⃗
Il centro di massa rappresenta il
valore medio della distribuzione
della massa di un corpo. Per un
sistema di corpi massivi è definito
come:
P
m ~r
~rcm = Pi i i
(1)
m
i
i
Momento angolare
Il momento angolare è una quantità vettoriale definita come:
~L = ~r × ~p = m ~r × ~v
(2)
In generale per un sistema a più corpi:
X
X
~L =
~Li =
mi~ri × ~vi
i
(3)
i
[L] = [r ][p] = N · s · m
(4)
5/24
Conservazione del momento angolare
Il momento angolare è una quantità
conservata, come la quantità di
moto. Immaginiamo di avere un
sistema di due corpi identici,
collegati da una fune, che ruotano.
L⃗
1
2
2R
L⃗
(5)
L = Rm1 v1 + Rm2 v2
(6)
= mR 2 ω + mR 2 ω = 2mR 2 ω (7)
1
2
2r
6/24
~L = ~r1 × ~p1 + ~r2 × ~p2
Se la corda cambia lunghezza
L = 2mr 2 Ω
2
R
Ω=
ω
r
(8)
(9)
Indice
Momento angolare
Forze e momenti
7/24
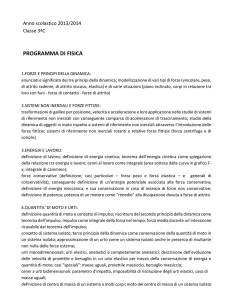
Punto di applicazione delle forze I
Fn⃗
r⃗
Fg⃗
O⃗
[wiki]
8/24
La forza peso si applica al centro di
massa dell’oggetto, mentre la
reazione vincolare al punto di
contatto. Cosa succede quando
queste non sono lungo la stessa
direzione?
Momento delle forze
Calcoliamo la derivata del momento angolare:
d
d~L
~r × ~p
=
dt
dt
d~r
d~p
=
× ~p + ~r ×
dt
dt
~
= ~v × ~p +~r × F
| {z }
(10)
(11)
(12)
=0
~
= ~r × F
(13)
= ~τ ,
(14)
che è chiamata momento delle forze.
[τ ] = [r ][F ] = N · m
(15)
9/24
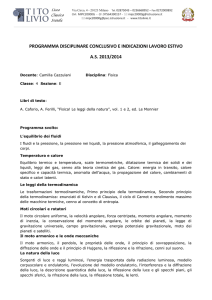
Punto di applicazione delle forze II
F∥⃗ F⟂⃗
Fn⃗
r⃗
Fg⃗
O⃗
[wiki]
10/24
τ⃗=r ⃗⨯Fg⃗
=r⃗⨯F⟂⃗
La forza peso si applica al centro di
massa dell’oggetto, mentre la
reazione vincolare al punto di
contatto. Cosa succede quando
queste non sono lungo la stessa
direzione?
Si crea un momento delle forze che
induce il corpo a ruotare.
Leve
Fq⃗
p
1o genere
Usando il momento delle forze è
molto semplice schematizzare il
funzionamento delle leve.
q
Fp⃗
p
Fq⃗
Fp⃗
q
Fq⃗
p
q
Fp⃗
2o genere
3o genere
~τtot = ~τp + ~τq
~ ~ τtot = p Fp + q F
q
(16)
(17)
Se ~τtot = 0 allora il sistema è in
equilibrio e
~ Fp q
(18)
= p
~
Fq 11/24
Tensione su una corda
B
A
Ft⃗
12/24
-Ft⃗
Quando due oggetti sono collegati
da una corda tesa, questi
esercitano una forza uno sull’altro
chiamata tensione. La tensione
sulla corda è uguale ed opposta ai
due estremi della stessa.
Carrucola
Corda di massa nulla ed
inestensibile, puleggia di massa
nulla.
~ t + ~r 0 × F
~0
0 = ~τtot = ~r × F
t
F⃗
Ft⃗
(19)
Ma essendo ~r ed ~r 0 di modulo
uguale e perpendicolari alle
rispettive forze:
~ ~ 0
(20)
Ft = Ft ,
F'⃗ t
Fg⃗
quindi per il principio di azione e
reazione
~ ~ (21)
F = Fg ,
13/24
Paranco
F⃗
Ft⃗
F''⃗ t
1
F'⃗ t
F'⃗ t
2
Fg⃗
F''⃗ t
Se il sistema è in equilibrio, la
corda ha massa nulla ed è
inestensibile, puleggia di massa
nulla, abbiamo:
0 = τ1tot = rFt − rFt0
(22)
0 = τ2tot = rFt0 − rFt00
~ tot = F
~0 +F
~ 00 + F
~g.
0=F
(23)
2
t
(24)
Quindi le forze di tensione sulla
fune hanno tutte lo stesso modulo
~ applicata per sollevare
e la forza F
il peso è
F =
14/24
t
Fg
.
2
(25)
Momento d’inerzia I
Calcoliamo il momento angolare di
un sistema di corpi
m1
~L =
X
i
i
=
X
mi~ri × ω
~ i × ~ri
=
X
v⃗2
v⃗1
m2
r1⃗
cm
r2⃗
X
~ri × mi ~vi
(26)
(27)
Ii ω
~i
(28)
i
mi ri2 ω
~i =
i
r3⃗
m3
~Li =
X
i
ove Ii = mi ri2 si chiama momento
d’inerzia ed abbiamo usato
l’identità [ref]:
~
~
~
~a × b × ~c = b ~a · ~c − ~c ~a · b
(29)
v⃗3
15/24
Momento d’inerzia II
Se i corpi sono vincolati tra di loro
si ha quello che si chiama un corpo
rigido. In questo caso si ha:
∀i ω
~i = ω
~
m1
v⃗2
v⃗1
e quindi:
m2
r1⃗ cm
m3
~L =
Ii ω
~i
(31)
!
=
v⃗3
X
i
r2⃗
r3⃗
X
Ii
ω
~ = I~
ω
(32)
i
ove il momento d’inerzia per un
corpo rigido è
X
I=
mi ri2
(33)
i
16/24
(30)
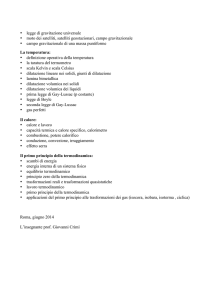
Momento d’inerzia III
Nel caso di corpi estesi si usa un integrale per il calcolo del momento
d’inerzia. È molto importante l’asse di rotazione.
I = MR 2
1
I = MR 2
2
2
I = MR 2
5
1
ML2
I=
12
1
I = ML2
3
anello di raggio R, asse ⊥ attorno al centro
(34)
cilindro di raggio R, asse ⊥ attorno al centro
(35)
sfera di raggio R, asse attorno al centro
(36)
un’asta lunga L, asse ⊥ attorno al centro
(37)
un’asta lunga L attorno ad un estremo
(38)
http://ebook.scuola.zanichelli.it/mandoliniparole/
download/il-momento-di-inerzia
http://people.unica.it/nicolapintus/files/2013/10/
elenco-momenti-di-inerzia.pdf
17/24
Accelerazione angolare
Avendo definito il momento d’inerzia possiamo cercarne la relazione
col momento delle forze
d~L
~τ =
dt
d
=
(I~
ω)
dt
d~
ω
=I
dt
= I~
α
ove α
~ è l’accelerazione angolare.
18/24
(39)
(40)
(41)
(42)
Energia cinetica
Ek =
X1
i
=
X1
i
=
=
2
mi vi2
(43)
mi ri2 ω 2
(44)
mi ri2
(45)
2
X
1 2
ω
2
i
1 2
Iω
2
(46)
19/24
Lavoro
Calcoliamo il lavoro per un moto
rotazionale
~ · d~s = Fr cos φ dθ
dW = F
F⃗
ϕ
ds⃗
per d~s molto piccolo si ha che
d~s ⊥ ~r e
π
=φ+ψ
2
r⃗'
r⃗
dθ
ψ
(47)
⇒
cos φ = sin ψ
(48)
quindi
~ ~ Fr cos φ = Fr sin ψ = r × F (49)
si ottiene
dW = |~τ | dθ
20/24
(50)
Potenza
Ricordiamo la definizione della potenza:
dW
dθ
= |~τ |
dt
dt
= ~τ · ω
~
P=
(51)
(52)
21/24
Analogia tra moto lineare e rotazionale
Lineare
Rotazionale
~x
θ
Massa
d~v
dt
d~v
~a =
dt
m
dθ
dt
d~
ω
α
~=
dt
X
I=
mi ri2
Quantità di moto
~p = m~v
~L = I~
ω
II principio
1
mv 2
2
~ = m~a
F
1 2
Iω
2
~τ = I~
α
Potenza
~ · ~v
P=F
P = ~τ · ω
~
Spostamento
Velocità
Accelerazione
~v =
ω
~ =
i
Energia cinetica
22/24
Moto di puro rotolamento I
⃗
2Vcm
ω
R
Perché un corpo rotoli senza
strisciare si hanno i vincoli
⃗
Vcm
P
f⃗
vP = 0
(53)
vcm = ωR
(54)
acm = αR
(55)
La forza ~f deve soddisfare
d~L
~ × ~f
= I~
α=R
dt
Ia
f = 2
R
(56)
(57)
23/24
Moto di puro rotolamento II
Se una forza è applicata al c.m.
⃗
2Vcm
ω
R
⃗
Vcm
P
f⃗
~ − ~f
m~a = F
Ia
ma = F − 2
R
F /m
F
a=
<
1 + I/(mR 2 )
m
(59)
(60)
Vediamo la relazione tra f ed F
F
< µS mg
1 + mR 2 /I
mR 2
F < µS mg 1 +
I
f =
24/24
(58)
(61)
(62)