4
Il lavoro e l’energia
1 LAVORO DI UNA FORZA
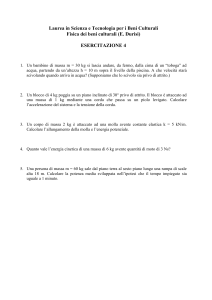
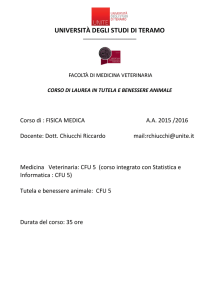
Una forza F continua e costante (in modulo, direzione e verso) sia applicata a un punto materiale P che si sposta da A a B lungo una traiettoria
rettilinea (fig. 4.1). Si definisce lavoro della forza F, per lo spostamento
s = AB del suo punto di applicazione, il prodotto scalare dei vettori forza e
spostamento:
= F⋅s.
(4.1)
Ricordando il significato da attribuire alla grandezza definita come prodotto
scalare di due vettori (capitolo 1, paragrafo 8.4), possiamo scrivere
= F s cos θ ,
(4.1′)
essendo F ed s i moduli di F ed s, rispettivamente, e θ l’angolo formato
dalle direzioni orientate dei due vettori.
Il lavoro è una grandezza scalare il cui segno, dal momento che F ed s
sono quantità positive, è determinato dal segno di cos θ. Se l’angolo θ è
acuto [0 < cos θ < (+1)] il lavoro è positivo, se θ è ottuso [(–1) < cos θ < 0]
il lavoro è negativo. Quando il lavoro di una forza è negativo si suole anche
dire che esso è compiuto contro la forza.
Casi particolarmente interessanti si hanno per θ = 0, θ = π e θ = π/2. Se
è θ = 0, cioè se il vettore spostamento ha la stessa direzione e lo stesso
verso del vettore forza, è cos θ = +1 ed il lavoro è semplicemente espresso
dal prodotto dei moduli della forza e dello spostamento:
= Fs.
(4.2)
Se è θ = π, cioè se i due vettori hanno la medesima direzione, ma verso opposto, è cos θ = –1 ed è
= –Fs.
A
F
θ
P
s
Figura 4.1
88
Capitolo quarto
(4.3)
B
Se, infine, è θ = π/2, cioè se la direzione dello spostamento è ortogonale a
quella della forza, è cos θ = 0 ed il lavoro è nullo.
Condizione necessaria perché una forza compia lavoro è che si sposti il
suo punto di applicazione. Il fatto che vi sia uno spostamento del punto di
applicazione, tuttavia, non è sufficiente per affermare che vi è lavoro; infatti, se lo spostamento si realizza in una direzione ortogonale alla retta
d’azione della forza, il lavoro, come si è visto, è nullo.
Le (4.1'), (4.2) e (4.3) mostrano che il lavoro è, dimensionalmente, il
prodotto di una forza per una lunghezza. Esso, quindi, si esprime nel sistema SI in newton per metro (N m), unità cui è stato dato il nome di joule
(simbolo: J). L’unità di misura del lavoro nel sistema CGS è l’erg che corrisponde all’unità dina per centimentro (dina cm). Si compie il lavoro di 1
joule quando il punto di applicazione di una forza dell’intensità di 1 newton
si sposta di 1 metro nella direzione della forza; il lavoro di 1 erg si realizza
quando il punto di applicazione di una forza dell’intensità di 1 dina si sposta di 1 centimetro lungo la direzione della forza. Poiché è 1 N = 105 dine
(capitolo 3, paragrafo 3), ed è 1 m = 102 cm, abbiamo:
1 J = 1 N m = 105 dine ⋅ 102 cm = 107 dine cm = 107 erg.
Conviene precisare che anche il modulo del momento di una forza è, dimensionalmente, eguale al prodotto di una forza per una lunghezza (capitolo 3, paragrafo 9) e quindi va espresso in N m e in dine cm. Le denominazioni di “joule” e di “erg” vengono tuttavia riservate al lavoro.
La definizione (4.1) di lavoro implica che la forza sia costante e lo spostamento del punto di applicazione rettilineo. In molti casi, non essendo le
due condizioni soddisfatte, applicare la (4.1) non ha senso. È tuttavia possibile generalizzare il concetto e la definizione di lavoro.
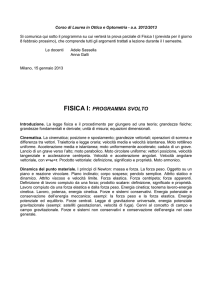
Supponiamo che su di un punto materiale P, che si sposta da A a B descrivendo una traiettoria curvilinea, agisca una forza F variabile da punto a
punto della traiettoria in modulo, direzione e verso [fig. 4.2 (a)]. Possiamo
immaginare di suddividere la traiettoria in tanti segmenti orientati Δs1,
Δs2, …, Δsn [fig. 4.2 (b)], ognuno di lunghezza tanto piccola da poter ritenere che lungo ciascuno di essi la forza si mantenga costante, in direzione,
verso e intensità. Siano Δs uno qualsiasi di tali spostamenti parziali, F il valore (supposto costante) della forza ad esso corrispondente e θ l’angolo che
le direzioni orientate di F e Δs formano fra loro [fig. 4.2 (b)]. Poiché sono
soddisfatte entrambe le condizioni che consentono l’applicazione della definizione di lavoro precedentemente data (forza costante, spostamento rettili-
(a)
B
F
F
F
A
Δsn
B
Δs
Δs3
θ
F
Δs2
A
Δs1
(b)
Figura 4.2
Il lavoro e l’energia
89
neo), possiamo dire che il lavoro della forza, per lo spostamento parziale
Δs, è
Δ = F ⋅ Δs = F Δs cos θ .
Il lavoro totale della forza variabile, per l’intero percorso da A a B, sarà allora, nei limiti dell’approssimazione introdotta, eguale alla somma dei singoli lavori parziali:
= ∑ F ⋅ Δs = ∑ F Δs cos θ .
(4.4)
Questa espressione del lavoro non è rigorosa perché fondata sull’ipotesi
che lungo ciascuno degli spostamenti parziali la forza si mantenga costante,
il che, in realtà, non è vero. L’approssimazione introdotta, però, è tanto più
accettabile quanto più piccola è la lunghezza di ciascuno dei segmenti
orientati in cui la traiettoria è stata suddivisa. Quindi se la suddivisione è
stata sufficientemente fine, cioè se la traiettoria è stata decomposta in un
numero sufficientemente elevato di segmenti orientati, la (4.4) si potrà ritenere valida.
2 IL TEOREMA DELL’ENERGIA CINETICA
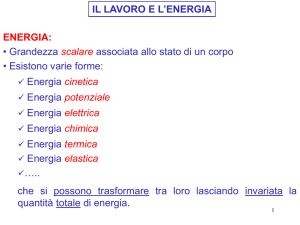
Consideriamo una particella P, di massa m, che si muova descrivendo
una traiettoria rettilinea con accelerazione scalare costante (moto uniformemente vario). Il vettore accelerazione a ha costantemente la direzione del
moto poiché, essendo la traiettoria rettilinea, manca la componente dell’accelerazione legata alle variazioni del vettore velocità in direzione e verso. Il
modulo di a è anzi costante in quanto che si identifica, nelle ipotesi fatte,
con il valore assoluto dell’accelerazione scalare (capitolo 2, paragrafo 4).
Per la seconda legge della dinamica la risultante F delle forze che agiscono
su P è legata ad a dalla relazione
F = ma.
(4.5)
Quindi anche F è costante in modulo ed ha la direzione del moto.
Se si introduce sulla traiettoria rettilinea un asse x orientato nel senso del
moto (fig. 4.3), possiamo sostituire alla relazione vettoriale (4.5) la relazione scalare
F = ma.
(4.6)
attribuendo alle grandezze F ed a il significato di grandezze algebriche.
Pertanto, se la forza F ha anche il verso del moto, la quantità F nella (4.6) è
positiva e tale è anche l’accelerazione scalare a: la forza determina un progressivo aumento della velocità. Se invece è diretta in senso opposto a
quello del moto, F è una forza ritardatrice: l’accelerazione è negativa e corrisponde ad una diminuzione progressiva della velocità.
2
1
O
x
P
F
x1
x2
Figura 4.3
90
Capitolo quarto
Riferiamoci ad un intervallo di tempo Δt durante il quale la particella P
si sposta dalla posizione 1, di ascissa x1 , alla posizione 2, di ascissa x2 .
Moltiplicando ambo i membri della (4.6) per la quantità x = x2 – x1 , corrispondente alla lunghezza del percorso compiuto nell’intervallo di tempo Δt,
otteniamo:
Fx = max.
(4.6′)
Indichiamo con v1 e v2 , rispettivamente, il modulo della velocità nelle posizioni 1 e 2. Essendo il moto uniformemente vario, fra l’accelerazione a costante del moto e le velocità v1 e v2 agli estremi del percorso di lunghezza x
deve sussistere la relazione (2.14). Quindi è
v 22 - v 21
a x = ––––––––
.
2
Tenendo conto di tale relazione e del fatto che il prodotto F x esprime, nelle
condizioni cui ci siamo riferiti, il lavoro compiuto lungo il percorso x
dalla forza F, otterremo in definitiva sostituendo nella (4.6′):
1 m v 2 – ––
1 m v2 .
= ––
2
1
2
2
(4.7)
1 m v2 ,
K = ––
2
(4.8)
La grandezza scalare
pari al semiprodotto della massa per il quadrato della velocità, definisce
1’energia cinetica della particella. Più in generale, la (4.8) esprime l’energia cinetica di un corpo esteso di massa m in moto traslatorio (così che tutti
i suoi punti si muovano, istante per istante, con la stessa velocità). Con l’introduzione dell’energia cinetica il risultato espresso dalla (4.7) si può enunciare dicendo che il lavoro della risultante delle forze agenti sul punto materiale eguaglia la variazione di energia cinetica della particella. Non sarebbe difficile dimostrare, sulla base della definizione (4.1′) di lavoro, che il
lavoro della risultante delle forze è eguale alla somma dei lavori delle singole forze. Si veda l’esercizio 4.5.
Al risultato (4.7) siamo giunti per una particella che si muova di moto
uniformemente vario descrivendo una traiettoria rettilinea. Esso tuttavia vale,
in generale, per un qualsiasi sistema di forze (costanti o variabili) agenti su di
un corpo che con moto traslatorio descriva una traiettoria curvilinea qualsiasi. Si giunge alla conclusione che il lavoro totale delle forze agenti su di
un corpo eguaglia la variazione di energia cinetica del corpo. Questo enunciato va sotto il nome di teorema dell’energia cinetica o teorema delle forze
vive e può esprimersi mediante la relazione
1 + 2 + … + n = ΔK ,
(4.9)
se si indicano con 1, 2, …, n i lavori delle singole forze agenti e con
ΔK la variazione dell’energia cinetica. Questo teorema, in quanto conseIl lavoro e l’energia
91
guenza immediata della seconda legge della dinamica, deve essere considerato come una forma particolare di essa e non come una legge nuova. Il teorema è utile per la risoluzione di determinati problemi, nei quali convenga
far riferimento al lavoro delle forze applicate ed alla variazione dell’energia
cinetica del corpo su cui esse agiscono. Esso vale, è bene ribadirlo, qualunque sia la natura delle forze agenti (gravitazionali, elastiche, d’attrito, ecc.).
3 IL CONCETTO DI ENERGIA
L’energia cinetica è una forma particolare di energia, il termine «energia» designando, in maniera molto generica, l’attitudine di un corpo a compiere lavoro. Una tale attitudine può nascere da stati diversi del corpo, e, in
relazione con essi, esistono forme diverse di energia le quali frequentemente si convertono l’una nell’altra.
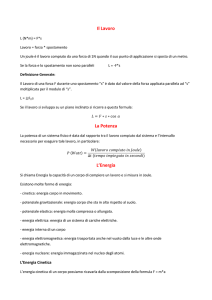
Per comprendere, in particolare, come l’energia cinetica consenta ad un
corpo di compiere lavoro riferiamoci alla semplice esperienza illustrata in
fig. 4.4. Un blocco, poggiato su di un piano orizzontale, viene lanciato contro una molla elicoidale; la direzione di moto coincide con l’asse della
molla disposto orizzontalmente [fig. 4.4 (a)]. Il piano su cui scivola il
blocco è abbastanza levigato da poter ritenere trascurabile l’azione della
forza d’attrito. Dopo che il blocco è venuto a contatto con l’estremità libera
della molla questa viene progressivamente compressa mentre la velocità del
blocco va gradualmente diminuendo sino ad annullarsi [fig. 4.4 (b)].
All’istante di arresto segue una fase di decompressione della molla durante
la quale il corpo inverte il movimento [fig. 4.4 (c)]. Fissiamo la nostra attenzione su ciò che accade subito dopo che il corpo è venuto a contatto con
la molla. Il fatto saliente è che, malgrado l’esistenza di una «reazione elastica» F ′, che si desta appena inizia la deformazione ed è diretta in senso
opposto a quello del moto [fig. 4.4 (b)], il blocco riesce ad avanzare ulteriormente di un tratto x pari a quello di cui la molla si deforma: il punto di
applicazione della forza elastica, che possiamo assumere coincidente con
l’estremo libero della molla, si sposta nel contempo nel senso secondo cui il
blocco si muove, cioè in senso opposto a quello della forza stessa; quindi vi
è un lavoro negativo collegato con tale forza. L’attitudine del corpo a deformare la molla, con conseguente lavoro contro la forza elastica, si attribuisce
al fatto che il blocco lanciato contro la molla possiede energia; e poiché si
tratta di energia che deriva dal movimento, si parla di energia «cinetica»
(dal greco «kinetikòs», attinente al movimento).
(a)
v
x
(b)
v
(c)
Figura 4.4
92
Capitolo quarto
F′
v=0
Un secondo esempio. Un sasso, lanciato verso l’alto, sale con moto ritardato, sino a sollevarsi ad una certa altezza rispetto al punto di lancio,
quindi ricade con moto accelerato. Ci sono profonde analogie fra questa situazione e quella considerata prima. Anche il sasso lanciato verso l’alto si
muove in una regione dello spazio in cui risente di una forza (in questo caso
la forza di gravità) avente verso opposto a quello del moto; la forza peso fa
qui le veci della forza elastica dell’esempio precedente: malgrado l’esistenza di questa forza il corpo riesce ad innalzarsi ad una certa altezza
mentre un lavoro viene compiuto contro la forza. Anche in questo caso il
comportamento del corpo viene attribuito al fatto che esso possiede energia
cinetica.
Un altro esempio. Un blocco viene lasciato cadere da fermo lungo un
piano inclinato molto levigato al termine del quale è disposta una molla elicoidale (fig. 4.5). Lasciato a sé, il corpo discende di moto uniformemente
accelerato (con accelerazione inferiore a quella, g, che si determinerebbe in
caduta libera) sino a che non viene a contatto con la molla; questa viene poi
progressivamente deformata mentre la velocità del blocco va gradualmente
diminuendo sino ad annullarsi. Evidentemente anche qui la deformazione
della molla è da attribuirsi all’energia cinetica del blocco; tuttavia, mentre
nel primo degli esempi considerati il blocco già alla partenza possiede energia cinetica, qui il corpo parte da fermo così che la sua energia cinetica iniziale è nulla; inoltre, l’energia cinetica che il blocco ha nell’istante in cui
viene a contatto con la molla dipende dalla posizione iniziale del corpo nel
senso che è tanto più elevata quanto maggiore è l’altezza h alla quale, rispetto al piano orizzontale passante per l’estremo libero della molla, il
corpo si trova nel momento in cui parte. In virtù di tale osservazione, l’attitudine del blocco a deformare la molla, con conseguente lavoro contro la
forza elastica, può in definitiva essere messa in relazione con la posizione
iniziale del corpo ed attribuita ad «energia posizionale» del corpo stesso.
Si può, in altri termini, ammettere che l’effetto prodotto dal blocco derivi,
indirettamente, dalla sua energia posizionale iniziale per il tramite dell’energia cinetica in cui l’energia posizionale si va successivamente e progressivamente convertendo durante il moto di discesa del corpo lungo il
piano inclinato.
h
Figura 4.5
Un ultimo esempio. Una massa gassosa è contenuta in un cilindro
chiuso da un pistone mobile senza attrito (fig. 4.6); una molla elicoidale è
collegata da una parte al pistone e dall’altra ad una parete rigida. Il gas
esercita una pressione sul pistone (e sulle pareti del cilindro), e nelle condizioni iniziali vi è equilibrio fra la forza esplicata dal gas sul pistone e sulla
molla e le forze dirette in senso opposto (la reazione elastica della molla e
la forza derivante dalla pressione atmosferica esterna). Se si riscalda il gas,
Il lavoro e l’energia
93
pistone
gas
cilindro
Figura 4.6
la pressione aumenta e il gas si espande: malgrado l’esistenza di forze dirette in senso opposto il pistone viene spinto verso l’alto e, nel contempo,
un lavoro viene compiuto contro di esse. Si conclude che la cessione di una
quantità di calore a un sistema può produrre effetti analoghi a quelli determinati da energia cinetica o posizionale. Siamo qui di fronte ad un’altra
forma di energia che chiameremo «termica» (dal greco «thermòs», caldo)
dal momento che essa è collegata con un riscaldamento del sistema.
Al lavoro contro la forza elastica e contro la forza di gravità si accompagna una diminuzione dell’energia cinetica del blocco lanciato contro la
molla e del sasso lanciato verso l’alto, in conformità con quanto è espresso
dal teorema dell’energia cinetica; possiamo dire che, nelle situazioni cui abbiamo fatto ora riferimento, il lavoro è compiuto a spese dell’energia cinetica. Per il sistema costituito dal gas che si espande il lavoro contro la forza
elastica e contro la forza collegata con la pressione atmosferica è compiuto
a spese di una parte dell’energia termica fornita al sistema. Orbene, il lavoro contro una forza è sempre compiuto a spese di una particolare forma di
energia; va però aggiunto che alla diminuzione dell’energia sotto una data
forma corrisponde sempre un aumento dell’energia sotto una forma diversa.
Alla diminuzione dell’energia cinetica del blocco lanciato contro la molla si
accompagna un aumento dell’energia potenziale elastica della molla; alla
diminuzione dell’energia cinetica di un corpo lanciato verso l’alto fa riscontro un aumento dell’energia potenziale gravitazionale dell’oggetto.
Nella relazione (4.9) esprimente il teorema dell’energia cinetica la grandezza «energia cinetica» viene eguagliata, attraverso una sua variazione,
alla grandezza «lavoro»; ne consegue che l’energia cinetica va espressa
nelle stesse unità in cui si misura il lavoro. Vedremo che questo è vero per
tutte le forme di energia.
4 FORZE CONSERVATIVE
Alcuni tipi di forza hanno nei riguardi del lavoro una singolare proprietà
per cui il lavoro della forza è indipendente dalla traiettoria seguita dal suo
punto di applicazione e dipende solo dalla posizione iniziale e dalla posizione finale di tale punto. Queste forze si dicono conservative.
94
Capitolo quarto
A
B
P
P
θ
θ
P
P
y1
C
P
D
y2
O′
O
Figura 4.7
Ci proponiamo di dimostrare che la forza di gravità è conservativa. Consideriamo a tal fine una regione dello spazio abbastanza ristretta da poter ritenere in essa l’accelerazione di gravità g costante in modulo, direzione e
verso, e immaginiamo che in tale regione un corpo, assimilabile a un punto
perché di dimensioni molto piccole rispetto alla lunghezza del percorso, si
sposti dalla posizione A alla posizione C (fig. 4.7); siano y 1 e y 2 le altezze
dei punti A e C rispetto a un piano orizzontale O O′ di riferimento. Fra gli
infiniti cammini che il corpo può seguire per portarsi da A a C consideriamone tre, il percorso diretto A → C e i percorsi A → B → C e A → D → C
costituiti ciascuno da un tratto orizzontale e da un tratto verticale. Facciamo
vedere che lungo i tre cammini, i quali hanno in comune la posizione iniziale e la posizione finale, il lavoro della forza di gravità assume il medesimo valore. Poiché, per l’ipotesi fatta su g, la forza peso m g, che agisce
sull’oggetto, di massa m, che si sposta, è costante in intensità, direzione e
verso, e i tre percorsi sono costituiti da tratti rettilinei, possiamo servirci,
per il calcolo del lavoro, della espressione (4.1'). Lungo ciascuno dei tratti
orizzontali AB e DC il lavoro è nullo poiché lo spostamento del punto di
applicazione della forza di gravità è perpendicolare alla direzione della
forza, che è verticale; lungo ciascuno dei tratti verticali AD e BC lo spostamento ha la stessa direzione e lo stesso verso della forza così che la (4.1') si
applica nella forma semplice (4.2): il lavoro lungo ognuno dei percorsi
A → B → C e A → D → C, identificandosi con il lavoro lungo uno dei
cammini B → C e A → D, è dato semplicemente dal prodotto dell’intensità
m g della forza per il modulo ( y1 – y2 ) dello spostamento del suo punto di
applicazione lungo uno dei percorsi B → C e A → D:
= m g ( y1 – y2) .
(4.10)
Il lavoro lungo il cammino diretto A → C è, conformemente alla (4.1'),
′ = m g cos θ
(4.11)
se si indica con la lunghezza del tratto AC, pari al modulo dello spostamento, e con θ l’angolo formato dalle direzioni orientate della forza e dello
Il lavoro e l’energia
95
spostamento. Per una proprietà trigonometrica, che abbiamo già avuto modo
di richiamare, il cateto AD del triangolo rettangolo ACD, la cui lunghezza
è ( y1 – y2), è eguale alla lunghezza dell’ipotenusa AC per il coseno dell’angolo DÂC; e poiché è DÂC = θ, possiamo sostituire ( y1 – y2) a cos θ nella
(4.11) riottenendo così la (4.10): i due lavori ed ′ sono eguali. Siamo
inoltre in grado di affermare che ai fini del lavoro della forza di gravità il
tratto inclinato AC è equivalente a un tratto verticale di pari dislivello.
Un’analisi più approfondita prova che il lavoro della forza di gravità tra
due punti è indipendente dal percorso anche se questo non è rettilineo. Consideriamo dunque una traiettoria curvilinea fra i punti A e C [fig. 4.8 (a)].
Per calcolare il lavoro della forza di gravità lungo tale percorso dobbiamo
immaginare il percorso stesso suddiviso in un numero grandissimo di piccoli spostamenti rettilinei, in conformità con quanto è stato esposto nel paragrafo 1 [fig. 4.8 (b)]. Consideriamo uno qualsiasi di questi spostamenti
parziali, ad esempio il trattino a mostrato in figura. Poiché, ai fini del lavoro della forza di gravità, un percorso inclinato è equivalente a un percorso verticale di pari dislivello, il trattino a è sostituibile dal trattino verticale b così che l’insieme degli spostamenti parziali in cui la traiettoria è
stata decomposta è equivalente al tratto verticale AD: il lavoro della forza
di gravità è ancora espresso dalla (4.10).
Nell’espressione ottenuta, che possiamo riscrivere nella forma
= m g y1 – m g y 2 ,
(4.10′)
non figurano grandezze che caratterizzino il percorso compiuto. La (4.10′)
mostra, al contrario, che il lavoro della forza di gravità, per un corpo di
massa m, dipende solo dalle altezze y1 e y2 corrispondenti alla posizione
iniziale e a quella finale. Se si indica sempre con y1 la quota di partenza e
con y2 quella di arrivo, la (4.10′) assume validità generale; essa, cioè, vale
anche quando il corpo si sposta da una quota più bassa ad una più elevata.
Se è y1 < y2 , cioè se l’oggetto si sposta verso l’alto, il lavoro è negativo; se è
y1 > y2 , il lavoro è positivo; se, infine, il percorso è tale che la quota di arrivo coincida con quella di partenza, il lavoro è nullo.
La forza elastica che si desta in un corpo, per esempio una molla elicoidale, che si deformi seguendo la legge di Hooke (capitolo 3, paragrafo 2), è
un altro esempio di forza conservativa. Vediamo intanto quale espressione
si può dare ad essa, e a tal fine riferiamoci a una molla elicoidale disposta
orizzontalmente, con l’estremità B libera e l’estremità A fissata a una parete rigida [fig. 4.9 (a)]. Introduciamo un asse x orizzontale di riferimento,
B
A
A
a
C
D
C
(a)
Capitolo quarto
D
(b)
Figura 4.8
96
b
con l’origine O in corrispondenza della posizione assunta dal punto B nella
molla indeformata. Se si applica, secondo l’asse della molla, una forza F di
intensità sufficientemente piccola, la molla si deforma [fig. 4.9 (b)], e fra la
deformazione x, misurata dalla variazione di lunghezza della molla, e la
forza deformante, sussiste, in conformità con la legge di Hooke, la relazione
F = kx.
(3.1)
La grandezza k è la costante elastica della molla; il suo valore dipende
dalle caratteristiche geometriche della molla (spessore, numero di spire,
ecc.) e dal materiale di cui essa è costituita.
Le grandezze F ed x che figurano nella (3.1) possono essere riguardate
come grandezze algebriche; infatti esse possono essere assunte positive
(F > 0, x > 0) se la forza deformante è diretta in modo da causare un allungamento della molla [fig. 4.9 (b)], negative (F < 0, x < 0) se la forza deformante è diretta in modo da determinare una compressione [fig. 4.9 (c)].
La forza elastica che si desta nella molla in conseguenza della deformazione ha la stessa direzione di F ma verso opposto; l’applicazione della
forza F determina nella molla una nuova configurazione statica caratterizzata dal fatto che la reazione elastica fa equilibrio alla forza deformante. Di
conseguenza, se indichiamo con F′ la forza elastica, considerandola anch’essa come grandezza algebrica, dovremo porre all’equilibrio F′ = – F;
dalla (3.1) si ottiene allora
F′ = – k x
(4.12)
che è la cercata espressione della forza elastica. La (4.12) esprime che forza
elastica e deformazione sono fra loro proporzionali ma con segno opposto:
se è x > 0, cioè se la configurazione della molla è caratterizzata da una
lunghezza maggiore di quella corrispondente alla molla indeformata, si ha
F′ < 0, il che significa che la forza elastica è diretta in senso opposto a
quello secondo cui si determina l’allungamento; se è x < 0 (compressione) è
F′ > 0 e la forza elastica è diretta in senso opposto a quello secondo cui si
ha l’accorciamento [fig. 4.9 (b) e (c)].
B
A
(a)
O
x
x
F′
B F
A
(b)
x
O
x
F′
A
B
(c)
F
O
x
Figura 4.9
Il lavoro e l’energia
97
Se una molla passa da una configurazione caratterizzata dalla deformazione x1 a una configurazione caratterizzata dalla deformazione x2 , si ha
uno spostamento del punto di applicazione della forza elastica, che assumiamo coincidente con l’estremo libero della molla; il conseguente lavoro
della forza elastica si dimostra essere dato da
1 k x 2 – ––
1 k x2 .
= ––
1
2
2
2
(4.13)
Anche nella (4.13) non figurano grandezze che dipendano dal modo in cui
si passa dalla configurazione di partenza a quella di arrivo dal momento che
in essa sono presenti solo la costante elastica k, caratteristica della molla, e
le deformazioni x1 e x2 che definiscono, rispettivamente, lo stato iniziale e
lo stato finale. Ciò prova che la forza elastica è conservativa.
Poiché nella (4.13) le quantità x1 e x2 figurano al quadrato, il segno del
lavoro sarà determinato solo dai valori assoluti di x1 e x2 . A seconda che la
deformazione iniziale sia, in valore assoluto, maggiore o minore di quella
finale, il lavoro risulterà positivo o negativo; se, dopo una serie di vicissitudini (compressioni, decompressioni, allungamenti, ecc.) la molla riprende
alla fine la sua configurazione iniziale (x1 = x2), il lavoro complessivo della
forza elastica sarà nullo.
F′ = – k x
x
O
diagramma della funzione
Figura 4.10
Per giustificare la (4.13) consideriamo il diagramma della funzione (4.12)
esprimente la forza elastica. Tale diagramma, riportato in fig. 4.10, è costituito da una retta passante per l’origine degli assi dal momento che per
x = 0 (deformazione nulla) è anche F′ = 0. L’inclinazione della retta è
quella per cui a ciascun punto della retta corrispondono un’ascissa x ed
un’ordinata F′ di segno opposto, come prescrive la (4.12). Il diagramma
consente di calcolare il lavoro della forza elastica conseguente al passaggio
della molla da una configurazione caratterizzata dalla deformazione x1 a
una configurazione caratterizzata dalla deformazione x2 . Segniamo sull’asse delle ascisse i valori x1 e x2 delle deformazioni iniziale e finale e suddividiamo l’intervallo da x1 a x2 in un numero grandissimo di intervallini,
ciascuno di ampiezza Δx tanto piccola da poter ritenere che in ognuno di
essi la forza elastica sia costante (fig. 4.11). L’area del rettangolo costruito
98
Capitolo quarto
F′ = – k x
x1
O
x
x2
B
C
A
D
Figura 4.11
su uno qualsiasi di tali intervalli è uguale al prodotto F′ Δx il quale esprime
il lavoro della forza elastica F′ per lo spostamento Δx del suo punto di applicazione. Il lavoro complessivo della forza elastica, per lo spostamento
dell’estremo libero della molla dalla posizione x1 alla posizione x2 , è dato,
nei limiti dell’approssimazione introdotta, dalla somma delle aree di tutti i
rettangoli mostrati in fig. 4.11. Ciò sarà tanto più vero quanto più piccoli
sono gli intervalli scelti e tanto più allora la somma delle aree dei rettangoli si approssimerà all’area del trapezio ABCD. Poiché la suddivisione la
si può immaginare fine quanto si vuole, si conclude che il lavoro complessivo della forza elastica è espresso proprio dal valore di questa area. D’altra
parte l’area del trapezio ABCD è eguale alla differenza delle aree dei triangoli OCD e OBA i quali, rispettivamente, hanno per basi x2 e x1 e per altezze i valori – k x2 e – k x1 assunti da F′ per x = x2 e per x = x1 . Abbiamo
dunque
1 x (– k x ) – ––
1 x (– k x )
= ––
2
2
1
1
2
2
da cui, sviluppando e ordinando, si ottiene la (4.13).
Il metodo grafico di cui ci siamo ora serviti è analogo a quello usato in
cinematica per valutare il percorso compiuto in un moto uniformemente
vario. Il procedimento, come mostra l’analisi matematica, corrisponde a
un’operazione di integrazione definita eseguita con criterio grafico.
5 ENERGIA POTENZIALE
Se un corpo di massa m si sposta nel campo gravitazionale, cioè nella
regione in cui esso risente l’azione dell’attrazione terrestre, la forza di gravità che lo sollecita compie il lavoro espresso dalla (4.10′); tale lavoro è indipendente dal percorso seguito dall’oggetto e dipende solo dalla posizione
iniziale e da quella finale. L’introduzione della grandezza W = m g y, ove y
indica l’altezza dell’oggetto rispetto a un livello di riferimento, consente di
esprimere, in termini analitici diversi, lo stesso concetto; potremo dire, infatti, che il lavoro è dato dalla differenza fra il valore W1 = m g y1 assunto
dalla grandezza W nello stato iniziale e il valore W2 = m g y2 assunto dalla
Il lavoro e l’energia
99
stessa grandezza nello stato finale. Considerazioni analoghe valgono per la
forza elastica il cui lavoro, per la (4.13), può essere espresso come differenza
1 k x 2 e W = ––
1 k x 2 che la grandezza W = ––
1 k x 2 assume
dei valori W1 = ––
1
2
2
2
2
2
in corrispondenza delle configurazioni di partenza e di arrivo. Questi risultati si possono generalizzare ed estendere a tutti i tipi di forza conservativa:
per ogni forza conservativa, di qualunque natura essa sia, esiste una grandezza W tale da consentire di esprimere il lavoro della forza come differenza dei valori W1 e W2 che la grandezza assume in corrispondenza dello
stato iniziale e dello stato finale:
= W1 – W2 .
(4.14)
La (4.14) vale dunque in generale. Ciò che cambia di volta in volta è
l’espressione della grandezza W che è caratteristica della forza: per la forza
1 k x2 , e così via. La
gravitazionale è W = m g y, per la forza elastica è W = ––
2
grandezza W prende il nome di energia potenziale ovvero posizionale. In
virtù della (4.14) essa va indicata, così come accade per l’energia cinetica e
per tutte le altre forme di energia, nelle stesse unità in cui si esprime il lavoro.
L’energia potenziale o posizionale di un corpo è energia che il corpo
possiede in virtù della posizione assunta in una regione in cui esso risente
dell’azione di una forza di tipo conservativo e che è potenzialmente trasfe1 k x2 è l’energia potenribile in altre forme di energia. In particolare, ––
2
ziale elastica di un corpo (ad esempio una molla elicoidale) che si trovi in
uno stato caratterizzato dalla deformazione x, m g y è l’energia potenziale
gravitazionale di un corpo di massa m che si trovi ad un’altezza y rispetto
ad un livello assunto convenzionalmente come livello di riferimento.
Indichiamo con ΔW la variazione di energia potenziale conseguente al
passaggio del corpo che risente di una forza conservativa dallo stato iniziale
allo stato finale; essa, conformemente al significato che si attribuisce alla
locuzione «variazione di una grandezza fisica», è espressa dalla differenza
fra il valore finale W2 e il valore iniziale W1 dell’energia potenziale. Poiché
è = W1 – W2 = – (W2 – W1), la (4.14) può mettersi nella forma
= – ΔW
(4.14′)
la quale mostra che il lavoro di una forza conservativa si può esprimere
come variazione, con il segno cambiato, dell’energia potenziale ad essa associata. Chiariamo il significato di questa proposizione. Immaginiamo che
il lavoro di una forza conservativa sia positivo ( > 0); perché anche il secondo membro della (4.14′) sia positivo bisogna che sia ΔW < 0, cioè che vi
sia una variazione negativa, e quindi una diminuzione, dell’energia potenziale associata alla forza; viceversa, ad un lavoro negativo ( < 0) fa riscontro una variazione positiva, ossia un aumento, dell’energia potenziale associata alla forza (ΔW > 0). Per esempio, se un oggetto si sposta da una quota
y1 più bassa a una y2 più elevata, si ha un lavoro contro la forza di gravità
( < 0) e, nel contempo, un aumento dell’energia potenziale gravitazionale
(ΔW > 0); se invece l’oggetto si sposta verso il basso, il lavoro della forza di
gravità è positivo e ad esso si accompagna una diminuzione dell’energia
potenziale gravitazionale.
100
Capitolo quarto
6 SISTEMI MECCANICI CONSERVATIVI. L’ENERGIA
MECCANICA DEI SISTEMI REALI. CONSIDERAZIONI
CONCLUSIVE SULL’ENERGIA E SUL LAVORO
Supponiamo che su di un corpo agiscano forze F1, F2, ..., Fn tutte di natura conservativa. Per il teorema dell’energia cinetica la somma dei lavori
1, 2, ..., n, compiuti dalle forze in un dato intervallo di tempo eguaglia
la corrispondente variazione dell’energia cinetica del corpo:
1 + 2 + ... + n = ΔK .
(4.9)
Poiché le forze sono tutte conservative, il lavoro di ciascuna forza è, per la
(4.14′), esprimibile come variazione, con il segno cambiato, dell’energia
potenziale ad essa associata; quindi, se W1, W2, ..., Wn sono, rispettivamente, le energie potenziali associate alle forze F1, F2, ..., Fn , dovrà essere
1 = – ΔW1 ,
2 = – ΔW2 ,
...,
n = – ΔWn .
Sostituendo nella (4.9) si otterrà
– (ΔW1 + ΔW2 + ... + ΔWn) = ΔK
ovvero
ΔW1 + ΔW2 + ... + ΔWn + ΔK = 0 .
(4.15)
Indichiamo con E l’energia meccanica totale del corpo, intesa come
somma dell’energia cinetica K e delle varie forme di energia potenziale,
W1, W2, ..., Wn . La somma delle variazioni delle energie K, W1, W2, ..., Wn
che figura al primo membro della (4.15) esprime la variazione dell’energia
meccanica totale che è quindi nulla:
ΔE = 0.
Ma dire che la variazione di una grandezza è eguale a zero equivale a dire
che la grandezza non varia; dunque:
E = costante.
(4.16)
Si giunge alla conclusione che l’energia meccanica totale di un corpo che
risente di sole forze conservative rimane invariata nel tempo. Questo enunciato esprime il principio di conservazione dell’energia per sistemi meccanici conservativi. In conformità con tale enunciato ad una diminuzione
dell’energia cinetica deve corrispondere un aumento, in pari misura, dell’energia potenziale sotto una determinata forma, e viceversa.
Vediamo quale riscontro ha questo principio nella realtà. A tal fine consideriamo il sistema costituito da una pallina di acciaio o di avorio che rimbalzi su di un pavimento levigato. Le forze che agiscono sulla sferetta sono
la forza di gravità P = m g, di natura conservativa, la forza resistente dovuta
all’aria e la forza impulsiva (cioè di brevissima durata) esplicata dal pavimento durante l’urto. Trascurare la resistenza dell’aria e assumere che la
forza impulsiva sia di natura elastica equivale a ritenere che sulla pallina
agiscano solo forze conservative. In tale ipotesi la somma dell’energia cinetica e delle energie potenziali associate a tali forze deve rimanere costante
nel tempo.
Il lavoro e l’energia
101
A
y
Figura 4.12
Supponiamo che la pallina parta, con velocità iniziale nulla, dalla posizione A, ad un’altezza y dal pavimento (fig. 4.12); in tale posizione l’energia cinetica è nulla mentre l’energia potenziale gravitazionale rispetto al
suolo vale m g y. Mentre la sferetta cade l’altezza diminuisce gradualmente
e quindi decresce l’energia potenziale gravitazionale; ciò comporta, in
conformità con il principio di conservazione dell’energia meccanica, che
l’energia potenziale che si va via via perdendo si converta in un eguale ammontare di energia cinetica. Nell’istante in cui la sferetta tocca il pavimento
l’energia potenziale riferita al suolo è nulla mentre l’energia cinetica assume
il massimo valore; poiché nella fase di caduta l’energia potenziale di partenza si è integralmente convertita in energia cinetica, la velocità della sferetta nell’istante in cui si ha il contatto con il suolo ha un valore v tale che
1 m v2 = m g y .
––
2
(4.17)
La forza impulsiva esplicata dal pavimento nel brevissimo intervallo di
tempo durante il quale la pallina resta a contatto con il suolo determina una
deformazione, sia pure lievissima, della sferetta; alla fase di deformazione,
durante la quale una piccola parte dell’energia cinetica si converte in energia potenziale elastica, segue una fase di «decompressione» durante la
quale si ha totale riconversione dell’energia potenziale elastica in energia
cinetica. Nel momento in cui si stacca dal pavimento la sferetta ha quindi la
1 m v 2 che aveva nell’istante in cui ha toccato il suostessa energia cinetica ––
2
lo. Nella fase di salita l’energia cinetica si va gradualmente convertendo in
energia potenziale gravitazionale, e poiché l’energia cinetica all’inizio di
tale fase è proprio eguale a quella posseduta dalla pallina al termine della
discesa dall’altezza y, la sferetta non può che risalire all’altezza y dalla
quale è caduta. Il processo, in presenza di sole forze a carattere conservativo, andrebbe avanti indefinitamente.
In pratica le cose vanno diversamente. C’è da dire, anzitutto, che la resistenza dell’aria si traduce in una forza avente costantemente verso opposto
a quello del moto; al lavoro negativo connesso con tale forza deve corrispondere, per il teorema dell’energia cinetica, una perdita di energia cinetica della pallina. Ne consegue che nell’istante in cui tocca il pavimento, la
sferetta ha una velocità ed un’energia cinetica inferiori a quelle che avrebbe
avuto, in condizioni ideali, cadendo dalla medesima altezza. Inoltre la forza
impulsiva che si manifesta durante la collisione con il pavimento non è per102
Capitolo quarto
fettamente elastica con il risultato che la pallina, subito dopo l’urto, possiede un’energia cinetica un po’ più piccola di quella che essa aveva nel
momento in cui ha toccato il suolo; infatti la sferetta ed il pavimento rimangono permanentemente deformati, sia pure in misura molto lieve, ed il lavoro di deformazione, negativo, non può che essere connesso con una perdita ulteriore di energia cinetica. Infine il suono che si percepisce al momento dell’urto indica che vi è un’altra piccola perdita di energia da parte
della pallina, eguale all’energia associata alla propagazione della perturbazione acustica. Tutti questi processi fanno sì che, subito dopo l’urto, la
sferetta abbia un’energia cinetica considerevolmente più piccola di quella
espressa dalla (4.17), cioè di quella che avrebbe avuto, in condizioni ideali,
cadendo dalla medesima altezza. Nella fase di risalita si ha poi un’ulteriore
perdita di energia, connessa con il lavoro contro la forza resistente. In definitiva, la pallina si porta ad un’altezza notevolmente inferiore a quella iniziale y. Essa rimbalza più volte consecutivamente sul pavimento risalendo
ad altezze via via inferiori, fino ad arrestarsi. L’energia meccanica della
pallina, dunque, non si conserva ma va gradualmente diminuendo nel
tempo.
Si potrebbero descrivere molti altri esempi ma le conclusioni non cambierebbero. Il comportamento del sistema che abbiamo esaminato, e di tutti
gli altri che si potrebbero considerare, mostra che il principio di conservazione dell’energia meccanica ha solo un valore ideale e teorico dal momento che esso si riferisce a condizioni (esistenza di sole forze di natura
conservativa) che non trovano mai riscontro nella realtà. Nei sistemi meccanici reali intervengono sempre, in misura più o meno grande, forze non
conservative o dissipative nelle quali rientrano le forze d’attrito e resistenti.
A differenza del lavoro delle forze conservative, che può essere, a seconda
delle circostanze, positivo, negativo o nullo, il lavoro delle forze dissipative
è sempre negativo e ciò comporta una dissipazione, cioè una perdita definitiva, di energia meccanica. È però estremamente importante il fatto che nei
sistemi reali, soggetti a forze d’attrito e resistenti, si osserva sempre la
comparsa di una quantità di calore che, nei confronti dell’energia meccanica perduta, sta costantemente nello stesso rapporto. Questa constatazione, unita alla considerazione che una variazione di temperatura in un sistema può essere prodotta indifferentemente da uno scambio di calore o di
energia meccanica, ha consentito di estendere il concetto di energia fuori
dal campo puramente meccanico, di includere il calore fra le forme di energia (energia termica) e di generalizzare il principio di conservazione
dell’energia non limitandolo alle forme di energia meccanica ma estendendolo a tutte le possibili forme di energia.
Quanto è stato detto consente di trarre le seguenti importanti conclusioni: (a) l’energia, in maniera molto generica, si può definire come la capacità di compiere lavoro, ma, in realtà, si presenta con aspetti molto diversi a
ciascuno dei quali è legata una particolare definizione; (b) malgrado questa
sua multiforme natura, l’energia ha, come caratteristiche peculiari, la convertibilità e la capacità di conservarsi: essa può trasferirsi da una forma
all’altra, può essere scambiata, ma non può essere creata o distrutta, cosicché un sistema totalmente isolato, cioè non in grado di interagire col mondo
esterno, sarà sempre caratterizzato dallo stesso contenuto di energia; (c) il
principio di conservazione dell’energia nella forma (4.16) è un’approssimazione valida nelle condizioni in cui si ritiene di poter trascurare i lavori
Il lavoro e l’energia
103
delle forze dissipative rispetto a quelli delle forze conservative.
Utili considerazioni conclusive si possono svolgere anche sul lavoro.
Sulla base di quanto è espresso dalla (4.9), il lavoro complessivo delle
forze agenti su di un sistema materiale è eguale alla variazione di energia
cinetica del sistema; in conformità con la (4.14′), il lavoro di una forza
conservativa eguaglia la variazione, con il segno cambiato, dell’energia potenziale associata alla forza. Questi risultati si possono generalizzare. In
tutte le situazioni il lavoro dà una misura della quantità di energia acquisita
o persa sotto una determinata forma; e poiché, come è già stato fatto rilevare, a una diminuzione dell’energia sotto una data forma si accompagna
un aumento, in pari misura, di energia sotto una forma diversa, possiamo
concludere che, in ogni caso, il lavoro dà una misura dell’energia persa o
acquisita da un sistema sotto una data forma o dell’energia convertita, in
seno al sistema, da una forma all’altra o dell’energia trasferita da un sistema all’altro.
Un ottimo esempio di sistema in cui l’energia si ritrova, in fasi successive, in forme diverse, è fornito da un saltatore con l’asta. L’energia acquisita nella fase di rincorsa si va successivamente convertendo prima in energia potenziale elastica dell’asta deformata e poi in energia potenziale gravitazionale. Nel momento in cui è all’altezza massima l’atleta è quasi fermo
(energia cinetica pressoché nulla) e l’energia potenziale gravitazionale assume il valore più elevato. Si veda l’esercizio 4.20.
7 POTENZA
Consideriamo una macchina, una persona, un dispositivo qualsiasi in
grado di esplicare una forza su di un corpo. Tale forza potrebbe, per esempio, servire a sollevare il corpo ad una certa altezza, ed il lavoro che ne consegue è lo stesso sia che l’operazione è compiuta in un secondo sia che essa
è compiuta in un’ora o in un intervallo di tempo più lungo. Molto spesso,
però, non interessa tanto conoscere quale sia l’entità del lavoro quanto la
«rapidità» con cui essa viene eseguito. A tal fine si prende in considerazione la grandezza fisica
= –––
Δt
(4.18)
espressa come rapporto fra il lavoro compiuto e l’intervallo di tempo Δt
impiegato, e definita come potenza della macchina, della persona, del dispositivo.
Facciamo un esempio. Per rimuovere la neve caduta su di un tratto di
strada un gruppo di operai muniti di pala compie, grosso modo, lo stesso lavoro di uno spazzaneve; ma la macchina esprime una potenza molto più
grande essendo in grado di portare a termine il lavoro di rimozione in un
tempo assai più breve.
Se la rapidità con cui il lavoro è compiuto varia nel tempo, si fa distinzione fra potenza media e potenza istantanea a seconda che l’intervallo di
tempo Δt considerato sia piuttosto ampio o molto piccolo. Per quel che è
stato detto alla fine del precedente paragrafo, la potenza esprime anche la
rapidità con cui l’energia viene convertita da una forma all’altra o trasfe104
Capitolo quarto
rita da un sistema all’altro o, infine, assorbita o ceduta da un sistema sotto
una determinata forma. La grandezza ora introdotta non va naturalmente
confusa con la potenza di una leva che, essendo rappresentata da una forza,
ha tutt’altro significato.
L’unità di misura della potenza nel sistema SI è il watt (simbolo: W) e
corrisponde al lavoro di 1 joule compiuto in 1 secondo:
J .
1 W = 1 ––
s
Molto usati sono due multipli del watt, il chilowatt (kW), pari a mille
watt (1 kW = 103 W), e il megawatt (MW), eguale a un milione di watt
(1 MW = 106 W). Di uso molto frequente è l’unità pratica denominata cavallo vapore (simbolo: CV) e corrispondente a 735 W. Nel sistema CGS la
potenza si esprime in erg al secondo (erg/s); e poiché è 1 J = 107 erg (vedi
paragrafo 1), è
J
erg
1 W = 1 –– = 107 ––––.
s
s
8 LAVORO FISIOLOGICO E LAVORO IN SENSO FISICO
Il lavoro inteso in senso fisico differisce in taluni casi dal concetto di lavoro fisiologico.
Quando si spinge un oggetto sul pavimento, ad esempio una valigia di
pelle, si compie un lavoro contro la forza d’attrito. Comunemente si dice
che, in tale situazione, si fa un lavoro doppio se si percorre una distanza
doppia, e ciò è in accordo con la definizione fisica di lavoro. Se, a parità di
distanza percorsa, si spinge sul pavimento un oggetto più scabro, per esempio una cassa di legno, si ha la netta sensazione che il lavoro sia maggiore,
ed anche questo è coerente con la definizione fisica di lavoro dal momento
che la forza d’attrito nel secondo caso è più grande.
Sappiamo che un lavoro compiuto contro una forza (d’attrito, elastica,
gravitazionale, ecc.) comporta sempre una spesa di energia sotto una determinata forma (cinetica, potenziale, termica, ecc.). Nei casi esaminati il lavoro contro la forza d’attrito viene compiuto a spese di una parte dell’energia chimica fornita dagli alimenti. Questa energia viene in realtà spesa per
produrre la contrazione delle fibre muscolari interessate, e ciò che si avverte a livello fisiologico è una sensazione di sforzo. Tale sensazione dà, in
qualche modo, una misura del lavoro muscolare che nei casi esaminati,
come abbiamo visto, è abbastanza consistente con la misura del lavoro in
senso fisico.
Esaminiamo ora il caso di una persona che sostenga una valigia camminando o restando ferma. Dal momento che nella prima situazione lo spostamento del punto di applicazione della forza peso è perpendicolare alla direzione della forza stessa, e nel secondo caso è addirittura nullo, si conclude
che in senso strettamente fisico non è stato compiuto alcun lavoro. Se però
si va ancora una volta ad esaminare ciò che accade al livello delle fibre muscolari, si osserva che, al contrario di quanto accade, per esempio, per una
sbarra d’acciaio, una fibra muscolare non può sostenere un carico statico
senza che le venga fornita energia. Anche quando un muscolo è interessato
Il lavoro e l’energia
105
a sostenere un carico statico le fibre muscolari si rilassano e si contraggono
ripetutamente, consumando energia ad ogni contrazione. Noi non siamo
consapevoli di questo processo, a causa del gran numero di fibre e della rapidità con cui si attuano le contrazioni. Ciò che si avverte è ancora una sensazione di sforzo: vi è dunque ancora lavoro «muscolare» o «fisiologico»
ma non vi è più lavoro in senso strettamente «fisico».
106
Capitolo quarto