MONOPOLI MAGNETICI IN FISICA QUANTISTICA
NICCOLÒ PEDERZANI
Indice
1. Introduzione
2. Monopoli in elettrodinamica classica
3. Monopoli in Meccanica Quantistica (Dirac)
4. Preliminari matematici
4.1. Fibrati vettoriali
4.2. Fibrati principali ed associati
4.3. Connessioni su un fibrato associato
4.4. Coomologia di C̆ech e de Rham
5. Monopoli secondo la teoria di gauge
5.1. Fibrati coordinati
5.2. Quantizzazione topologica
6. Quantizzazione magnetica su T2
7. Ricerca di monopoli
8. Conclusioni
Appendice A. Prova relazione flusso-cociclo (5.2.22)
Relatore: Prof. Enrico Onofri
Date: 6 dicembre 2010.
1
3
4
7
13
13
19
22
28
32
32
35
38
41
45
46
2
NICCOLÒ PEDERZANI
MONOPOLI MAGNETICI IN FISICA QUANTISTICA
3
1. Introduzione
Obiettivo di questo elaborato è ripercorrere la storia dei monopoli
magnetici, dalla loro postulazione nella fisica pre-quantistica alla dimostrazione della loro compatibilità con la teoria quantistica per merito
di Dirac.
Verrà anche introdotta la moderna teoria di gauge, alla luce della quale sarà provata la condizione di quantizzazione della carica magnetica,
facendo uso cioè degli strumenti messi a disposizione dalla geometria
differenziale. Infine sono riportati un esempio pratico di quantizzazione
su una varietà particolare, il toro bidimensionale, ed un breve riassunto degli esperimenti principali effettuati per rintracciare l’esistenza dei
monopoli magnetici, esperimenti che hanno avuto finora esito negativo.
4
NICCOLÒ PEDERZANI
2. Monopoli in elettrodinamica classica
La presenza di forze attrattive nella materia era nota sin dai tempi
dell’antica Grecia, quando, strofinando pezzi di resina fossile (ambra
= eléctron in greco) si otteneva l’effetto di attirare pezzetti di carta
o capelli. Nella regione greca di Magnesia, invece, veniva estratto un
minerale ferroso capace di attrarre altri pezzi di ferro o nichel, da cui
il nome forza magnetica.
La teoria di tali fenomeni venne messa a punto solo nel XIX secolo per
opera di Ampère, Faraday e Maxwell le cui equazioni legano i campi
elettrico e magnetico ed implicano la propagazione delle onde elettromagnetiche.
Le equazioni di Maxwell nel sistema di unità di misura cgs nel vuoto
sono le seguenti:
∇ · E = 4πρ
,
∇ × E = − 1c ∂B
,
∂t
∇·B=0
∇×B=
1 ∂E
c ∂t
−
4π
j
c
.
E’ evidente la simmetria tra le equazioni per il campo elettrico E e
quello magnetico B, che sarebbe completa se esistessero cariche magnetiche, denominate monopoli magnetici o semplicemente monopoli.
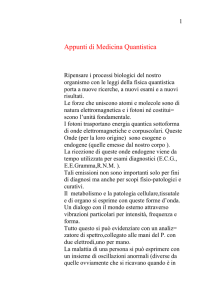
Nell’esperienza di tutti i giorni si può provare a spezzare in due un
magnete, ottenendo cosı̀ due magneti più corti, ma pur sempre dotati
di due polarità opposte. Se si volesse dare una spiegazione poco formale, si potrebbe ricorrere a conoscenze di fisica già note ad Ampère:
un campo magnetico è generato da cariche elettriche in movimento. A
causa di tale definizione, lo spazio tridimensionale sarà sempre diviso in due regioni distinte dal piano che contiene il moto della carica;
poniamo che tale carica stia ruotando attorno ad un asse, in modo da
realizzare una spira microscopica (questa è la situazione che si presenta
nella realtà atomica con le orbite degli elettroni). In ciascuna delle due
regioni in sui è diviso lo spazio si vedrà circolare la particella in direzioni opposte, oraria ed antioraria, cosı̀ da avere necessariamente un polo
~ attraverso una
nord ed uno sud. Di conseguenza, il flusso del campo B
MONOPOLI MAGNETICI IN FISICA QUANTISTICA
5
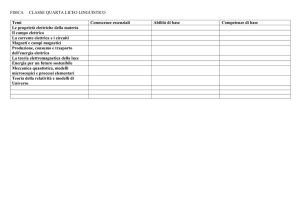
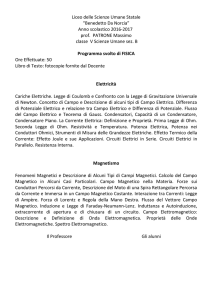
Figura 1. a)Un magnete spezzato continua a presentare in ognuno dei due pezzi una polarità nord ed una sud,
b)Correnti atomiche come causa delle polarità magnetiche
qualsiasi superficie chiusa contenente la spira è nullo, in accordo con
~ = 0.
∇·B
In presenza di sorgenti del campo magnetico (o pozzi, a seconda che si
comportino come poli nord o sud), dette ρe la densità di carica elettrica
e ρm la densità di carica magnetica ed analogamente per le densità di
corrente, le equazioni di Maxwell si riscrivono come:
∇ · E = 4πρe
−
∇ × E = − 1c ∂B
∂t
,
4π
j
c m
∇ · B = 4πρm
, ∇×B=
1 ∂E
c ∂t
+
4π
j
c e
.
Nel caso ci si trovi nel vuoto senza sorgenti di campo, le equazioni sono
~ 7→ (B,
~ −~E).
invarianti per sostituzione (~E, B)
Inoltre le equazioni possono esser scritte in forma covariante introducendo il tensore di Maxwell:
Fµν = ∂µ Aν − ∂ν Aµ
.
Se Aµ = (V, Ax , Ay , Az ) allora
0
Ex
Ey
Ez
−E
0
Bz −By
x
Fµν =
−Ey −Bz
0
Bx
−Ez By −Bx
0
.
6
NICCOLÒ PEDERZANI
Si tratta di un tesore di secondo grado antisimmetrico, le equazioni cui
deve soddisfare sono ∂ν Fµν = 0 e ∂ν ? Fµν = 0 dove si è posto
? µν
F
1
= µνρσ Fρσ
2
ossia
? µν
F
0
Bx
By
Bz
−B
0 −Ez Ey
x
=
−By Ez
0 −Ex
−Bz −Ey Ex
0
.
La dualità campo elettrico-magnetico si ottiene sostituendo Fµν 7→ ? Fµν
. In presenza di cariche o sorgenti le equazioni di Maxwell diverrebbero
∂ν Fµν = jν
,
∂ν ? Fµν = kν
e la dualità si ha scambiando jµ 7→ kµ e kµ 7→ −jµ .
In conclusione, le equazioni di Maxwell ammettono la presenza di cariche magnetiche.
MONOPOLI MAGNETICI IN FISICA QUANTISTICA
7
3. Monopoli in Meccanica Quantistica (Dirac)
Per poter dare una prova della consistenza dell’esistenza di monopoli magnetici con la meccanica quantistica occorre attendere Dirac ed
il suo lavoro del 1931: in [?] si mostra come l’esistenza dei monopoli
discenda naturalmente dai postulati della meccanica quantistica:
(1) A ciascun microsistema fisico è associato uno spazio di Hilbert
H i cui vettori rappresentano univocamente lo stato di detto
sistema.
(2) la probabilità di trovare un microsistema inizialmente nello stato |Ψ > in un altro stato |Φ > è | < Ψ|Φ > |2
(3) ad ogni grandezza osservabile è associato un operatore lineare
autoaggiunto agente sui vettori di H; i valori che tale osservabile
può assumere sono gli autovalori dell’operatore associato
(4) una misura di una data osservabile fa precipitare la funzione
d’onda in un autovettore associato al valore osservato dell’operatore.
In realtà per la discussione che segue saranno sufficienti i primi due,
assieme alla legge che specifica l’evoluzione temporale dei ket di stato,
ossia l’equazione di Schroëdinger:
d
^ >
|ψ >= H|ψ
dt
con la condizione che la soluzione appartenga al dominio dell’operatore
^
Hamiltoniano H.
La più generale funzione d’onda ψ sarà una funzione dello spaziotempo
a valori complessi, la cui espressione più generale è
ψ = Aeiγ
.
Concentriamo l’attenzione sulla variazione di fase della funzione d’onda.
La variazione di fase di una funzione d’onda ψ tra due punti dello
spaziotempo A e B è ∆γ = γ(~xB , tB ) − γ(~xA , tA ). Ogni costante reale
α addizionata alla fase γ = γ(~x, t) è superflua, in quanto si elide nel
8
NICCOLÒ PEDERZANI
momento del calcolo di ∆γ; pertanto il valore di γ in un determinato
punto non ha alcun significato fisico. Facendo ulteriori ipotesi, possiaR
mo assumere che ∆γ, definita come l’integrale AB < ∇γ, ds > dipenda
dal persorso AB scelto per congiungere i due punti A e B:
Z
< ∇γ, ds >6= γ(~xB , tB ) − γ(~xA , tA )
.
∆γ =
AB
Se la variazione di fase dipende dal cammino percorso, tale variazione
non si annullerà circuitando γ lungo un percorso chiuso C; perciò, come
illustra l’immagine sopra, in generale lungo C ∆γ 6= 0.
Affinché questa non integrabilità della fase non comprometta tutta la
teoria quantistica, occorre che ∆γ sia la stessa per ogni funzione d’onda
relativamente ad una data curva chiusa C.
Cosı̀ facendo infatti quantità come
Z
(1)
< ψm |ψn >=
e−iγm Am (~x)eiγn An (~x) d~x
R3
sono ben definite, poichè hanno fase definita.
In caso di un cambiamento di base il ragionamento precedente assicura l’indipendenza dal termine di fase: data {|xi >, i = 1, 2, . . .} sia
{|xi0 >, i = 1, 2, . . .} una nuova base dello spazio di Hilbert. Allora
X
|xj >=
|xi0 >< xi0 |xj >
i
siccome il prodotto scalare è definito come l’integrale del prodotto su
C (commutativo), sparisce ancora una volta l’esponenziale eiγ .
Si scriva ora la funzione d’onda come
(2)
ψ = eiβ ψ1
MONOPOLI MAGNETICI IN FISICA QUANTISTICA
9
dove β = β(~x, t) è una funzione polidroma dello spaziotempo, ψ1 un
ket dalla fase definita in ogni punto.
Tuttavia β avrà delle derivate definite:
k=(
∂β ∂β ∂β ∂β
,
,
,
) ,
∂t ∂x ∂y ∂z
che non rispettano ovunque le condizioni di irrotazionalità, i.e.
∂ki
∂kj
6=
∂xi
∂xj
i, j = 1, . . . , 4 .
La variazione di fase ∆β che si ottiene percorrendo una curva chiusa C
sarà in tal caso
Z
Z
∆β =
< k, ds >= < dk, dS >
C
S
dove si è utilizzato il teorema di Stokes: data una varietà differenziabile
orientata M di dimensione n, ω una n − 1-forma differenziale, allora
Z
Z
(3)
ω=
dω .
∂M
M
Dalla definizione (2) di |ψ > si ottengono le equazioni
−ih̄ ∂x∂ j |ψ >= eiβ (−ih̄ ∂x∂ j + h̄ki )|ψ1 >
j = 1, 2, 3
∂
∂
|ψ >= eiβ (ih̄ ∂t
+ h̄k0 )|ψ1 > ,
ih̄ ∂t
avendo indicato con k0 la componente temporale e con ~k la parte spaziale.
Ne segue che se |ψ > soddisfa l’equazione d’onda (in cui compaiono
gli operatori energia E = ih̄∂t ed impulso pi = −ih̄∂i , i = x, y, z),
automaticamente il ket |ψ1 > soddisfa un’equazione d’onda con i nuovi
˜ e Ẽ definiti come:
operatori ~p
˜ = ~p − ~k
~p
Ẽ = E + k0
coincidenti con gli operatori che compaiono nell’equazione d’onda di
una particella con carica q che si muove in un campo elettromagnetico
10
NICCOLÒ PEDERZANI
il cui potenziale vettore A è dato da:
(4)
h̄
A 0 = − k0
q
Ai =
h̄c
ki , i = 1, 2, 3
q
.
Il valore della variazione di fase ∆β vale dunque:
Z
(5)
∆β = dk · dS
S
Sostituendo le espressioni (4) in (5) in condizioni stazionarie (t =costante):
Z
q
~ · dS .
(6)
=
B
h̄c S
L’equazione (6) rappresenta il flusso di un campo magnetico attraverso
~ sia solenoidale (∇ · B = 0),
la superficie S. A conferma del fatto che B
~ attraverso la superficie S corrisponde all’integrale
il flusso del campo B
del potenziale vettore A lungo il bordo di S, ma essendo S chiusa per
definizione non ha bordo e l’integrale (6) si annulla.
Il punto fondamentale per l’affermazione che i monopoli possono esistere, sta nell’osservazione che fasi che differiscono per multipli interi
di 2π sono equivalenti. Si può supporre che per piccoli circuiti chiusi le
differenze siano inferiori di 2π poiché, per poter soddisfare l’equazione
di Schroëdinger, la funzione d’onda deve essere continua.
Nell’insieme di punti in cui la funzione d’onda si annulla (essendo complessa sono necessarie due condizioni, quindi si ha una linea nello spazio, detta stringa di Dirac) i discorsi sulla fase perdono ogni significato,
cosı̀ come la continuità della funzione β.
Circuitando β lungo una curva chiusa attorno alla stringa di Dirac,
supposta non osservabile, si ha
X
q
Φ(B) = 2π
nstringa
n∈Z ,
(7)
h̄c
stringhe
dove il flusso è calcolato attraverso la superficie avente come bordo la
curva chiusa C.
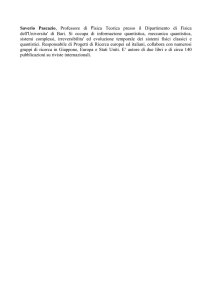
Si può anche suddividere C in sottocircuiti, ciascuno contenente una
sola stringa, caratterizzata da un valore intero nstringa . Se la stringa attraversa due volte la superficie la situazione è quella iniziale di
MONOPOLI MAGNETICI IN FISICA QUANTISTICA
11
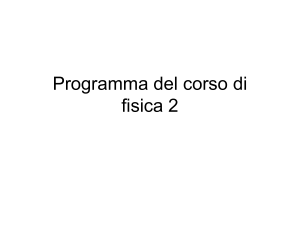
Figura 2. Circuitazioni su percorsi che contengono (P)
e non contengono (P 0 ) la stringa di Dirac
flusso ΦB nullo e nessuna variazione di fase, ma se anche una sola delle stringhe ha origine all’interno della superficie la situazione cambia
drasticamente; da (7) otteniamo
2πh̄c X
nstringa
.
ΦB =
q stringhe
Siccome la variazione di fase lungo un circuito C è la stessa per tutte
le funzioni d’onda, esse risentiranno dello stesso flusso netto dovuto
all’origine della stringa, che d’ora in poi definiremo come monopolo
magnetico.
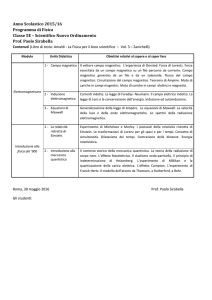
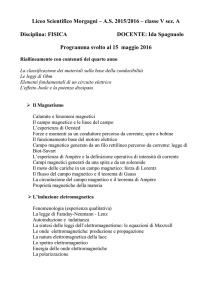
La situazione è analoga a quella di un solenoide con una densità di spire
infinite aventi per estremi il monopolo nord e sud (detto antimonopolo),
che trasporta attraverso la sua sezione infinitesima un flusso finito,
tale per cui la quantità netta ΦB 6= 0, altrimenti la stringa “buca”
Figura 3. Monopoli ai capi di un solenoide di sezione infinitesima
la superficie, dotandola di un contorno su cui è possibile ottenere un
valore non nullo per
Z
dk · ds ∧ ds 0
.
S\(S∩stringa)
12
NICCOLÒ PEDERZANI
Si ricava cosı̀ la condizione di quantizzazione che lega la carica elettrica
elementare alla carica magnetica elementare:
(8)
qg =
h̄c
n
2
.
MONOPOLI MAGNETICI IN FISICA QUANTISTICA
13
4. Preliminari matematici
Spesso nello studio di sistemi fisici il numero di gradi di libertà con
cui si descrive un sistema è eccessivo, si pensi per esempio ad un corpo
in moto qualsiasi ed a tutti i sistemi inerziali in cui il suo moto può
esser descritto. Secondo la teoria della relatività galileiana (o di quella
ristretta) il punto di vista di tutti i sistemi di riferimento sarà perfettamente equivalente, e si potrà interpretare il punto di vista di un certo
sistema S1 rispetto ad S2 conoscendo la trasformazione di Galilei (o di
Lorentz) tra di essi. Con il passare degli anni ed il progredire della
conoscenza umana dei fenomeni naturali (forze nucleari forti e deboli),
si è resa necessaria una descrizione formale delle classi di equivalenza
dei sistemi di riferimento. Inoltre, all’interno di ciascuna classe, si richiede di poter passare da un sistema di coordinate ad un altro tramite
trasformazioni invertibili.
Tale descrizione è fornita da oggetti topologici chiamati fibrati, su cui è
inoltre possibile estendere definizioni quali la differenziabilità e l’azione
di gruppi. Lo stesso Yang, padre della teoria di gauge, disse:
The beauty and profundity of the geometry of fibre bundles were to a
large extent brought forth by the (early) work of Chern. I must admit,
however, that the appreciation of this beauty came to physicists only
in recent years.
Procediamo dunque con la descrizione degli strumenti matematici necessari per sviluppare la teoria di gauge.
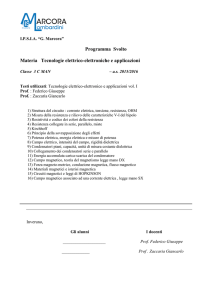
4.1. Fibrati vettoriali. Definizione
Un fibrato è il dato di (E, M, π, F) dove:
• E, M, F sono spazi topologici, chiamati rispettivamente spazio
totale, spazio di base e fibra
• π : E → M applicazione suriettiva continua detta proiezione
Per ogni ricoprimento {Uα , Uβ , Uγ , . . .} di M esiste un insieme di omeomorfismi {φα , φβ , φγ , . . .} tale che ∀U ⊂ M esiste un omeomorfismo
14
NICCOLÒ PEDERZANI
φ : π−1 (U) → U × F.
π−1 (U)
π
z
φ
/
U×F
pU
U⊂M
Dove con pU : U × F −→ U ⊂ M, ∀u ∈ U, f ∈ F, (u, f) 7→ u è indicata
la proiezione sull’intorno U. Se oltre alla struttura di spazi topologici
Figura 4. Rappresentazione intuitiva di un fibrato
richiedo la differenziabilità degli atlanti che ricoprono E, M ed associo
ad ogni punto dello spazio di base M uno spazio vettoriale, ottengo un
fibrato vettoriale:
Definizione
Un fibrato vettoriale di rango q è il dato di (E, M, π) dove:
• E è una varietà differenziabile detta spazio totale
• M è lo spazio di base, anch’essa varietà differenziabile di dimensione m
• π : E → M applicazione suriettiva di classe C ∞ chiamata
proiezione
• per ogni ricoprimento {Uα , Uβ , Uγ , . . .} di M esiste un insieme di
diffeomorfismi {φα , φβ , φγ , . . .} tale che per ogni U ⊂ M esiste
un diffeomorfismo φ : π−1 (U) → U × Rq che rende il seguente
diagramma commutativo.
MONOPOLI MAGNETICI IN FISICA QUANTISTICA
π−1 (U)
π
y
φ
/
15
U × Rq
pU
U
∼ Rq viene chiamata fibra standard
In particolare ∀p ∈ M, π (p) =
relativa al punto p.
In ciascuna delle intersezioni non vuote del ricoprimento Uα ∩ Uβ 6= ∅
devo aver modo di cambiare in maniera differenziabile la parametriz−1
zazione sulla fibra π (Uα ∩ Uβ ). A tal fine si definiscono le funzioni di
transizione:
gαβ : Uα ∩ Uβ −→ GL(q, R) ,
−1
∀x ∈ M,~v ∈ Rq
(x,~v) 7→ (x, gαβ (~v)) .
Definizione
Dato un fibrato vettoriale (E, M, π) si definisce sezione locale del fibrato
un’applicazione s : U ⊆ M −→ E tale che, per ogni p ∈ U, valga
π ◦ s = Id .
La sezione si dice globale se è definita su tutta la varietà M.
Un esempio di sezione è costituito dalle 0-forme f : M → R sulle varietà: il loro grafico infatti è l’insieme {(x, f(x)) | x ∈ M} contenuto nel
fibrato banale M × R.
L’insieme delle sezioni lisce su M in E, denotato con Γ (E) , è dotato della struttura di spazio vettoriale definendo ∀x ∈ M, ∀f ∈ C ∞ (M), ∀s, s1 , s2 ∈
Γ (E):
• f(s(x)) = (fs)(x)
• (s1 + s2 )(x) = s1 (x) + s2 (x) .
Definizione
Una connessione su un fibrato vettoriale (E, M, π) è una applicazione
D : Γ (E) −→ Γ (T ∗ M ⊗ E)
che gode delle seguenti proprietà:
16
NICCOLÒ PEDERZANI
• D(s1 + s2 ) = Ds1 + Ds2 , ∀s1 , s2 ∈ Γ (E)
• D(αs) = dα ⊗ s + αDs, ∀f ∈ C ∞ (M), s ∈ Γ (E) .
Localmente una connessione D è data da un set di q 1-forme differenziali. Considero come base di Γ (E) un insieme di sezioni sα , 1 6 α 6 q
linearmente indipendenti che siano immagini attraverso il diffeomorfismo Φ di una base della fibra standard Rq .
Sia U un intorno coordinato di M con coordinate locali xi , 1 6 i 6 m.
L’insieme di sezioni sα , 1 6 α 6 q viene chiamato campo di riferimeni
locali di E su U. Ad ogni punto p ∈ U possiamo associare la base
i
dx ⊗ sα , 1 6 i 6 m, 1 6 α 6 q
del prodotto tensoriale Tp∗ U ⊗ π−1 (p).
Siccome Dsα è una sezione locale di U sul fibrato T ∗ M ⊗ E, può esser
scritta scomponendola nelle sue componenti lungo il riferimento locale
[?]:
X
β
Γαi
dxi ⊗ sβ
(9)
Dsα =
16i6m, 16β6q
β
con Γαi
funzioni lisce su U. Chiamando
ωβα
:=
m
X
β
Γαi
dxi
i=1
l’equazione (9) diventa
Dsα =
q
X
ωβα ⊗ sβ
.
β=1
Per semplificare la scrittura possiamo introdurre una notazione matriciale:
s1
..
S=.
sq
MONOPOLI MAGNETICI IN FISICA QUANTISTICA
ω11 · · · ωq1
.
.
ω = .. . . . ..
ω1q · · · ωqq
17
,
cosı̀ che la derivata covariante di una sezione possa essere scritta in
maniera compatta:
DS = ω ⊗ S .
Si scelga ora un’altra base sulla fibra e si tiri indietro tramite Φ su
π−1 (U), in modo tale da avere S 0 = t (s10 , . . . , sq0 ) come riferimento locale
corrispondente alla nuova base scelta. Vogliamo vedere come cambia
l’espressione della matrice di connessione.
Assumiamo che S 0 = A · S, dove
1
a1 · · · aq1
.
.
A = .. . . . .. ,
a1q · · ·
aqq
A : U −→ GL(q, R) .
Gli elementi
sono funzioni C ∞ su U.
Con questa scrittura in forma matriciale, dalla definizione di connessione abbiamo:
aji
DS 0 = dA ⊗ S + A · DS = (dA + A · ω) ⊗ S ,
da cui, sostituendo S con A−1 · S 0 , ottengo
(10)
ω 0 = dA · A−1 + A · ω · A−1
.
Sia {Uα , Uβ , . . .} un ricoprimento di M e sia Uα ∩ Uβ 6= ∅. Con un
procedimento analogo a (10), siano Sα , Sβ riferimenti locali definiti
rispettivamente in Uα , Uβ . Allora vale la relazione
Sβ = Aβα · Sα
.
Di conseguenza, la matrice di connessione ωβ sarà
−1
ωβ = dAβα · A−1
βα + Aβα · ωα · Aβα
.
18
NICCOLÒ PEDERZANI
Un esempio di fibrato vettoriale è il fibrato tangente
[
TM =
Tp M
p∈M
di una varietà differenziabile M (spazio di base) di dimensione n. La
fibra è lo spazio dei vettori tangenti ad M nel punto p, ossia Tp M ≈ Rn .
Le sezioni di tale fibrato vettoriale sono i campi vettoriali sulla varietà
M:
X : M −→ TM
X(p) = (p, Xp ) .
Nello studio della meccanica quantistica di particelle scalari cariche in
un campo elettromagnetico si semplifica l’espressione (10), in quanto il
fibrato vettoriale in considerazione è banale e di rango 1 (viene detto
anche fibrato lineare): E = M × C.
Le sezioni di tale fibrato sono le funzioni d’onda ψ : M −→ M × C
viste come 0-forme a valori nel fibrato. L’equazione di cambiamento
di riferimento nella fibra perciò assume una forma molto semplice: la
matrice A di cambiamento di base è 1×1, dunque commuta con la
matrice di connessione ω ottenendo cosı̀
(11)
ω 0 = dA · A−1 + ω
cosı̀ come ci si aspetta dalla teoria classica dell’elettromagnetismo, dove
il potenziale vettore del campo è definito a meno di una forma esatta.
Per la nostra trattazione che coinvolge la sola interazione elettromagnetica, ci potremmo fermare qui e non sviluppare altre strutture matematiche. Per completezza però verrà esposta la teoria più generale delle connessioni su fibrati. A ciascuna forza fondamentale è associato un gruppo di trasformazioni G i cui elementi sostituiscono
A : U ⊂ M −→ GL(q, R), ossia spiega come cambiano il potenziale e la sezione (funzione d’onda) se si sceglie un altro riferimento nella
fibra standard.
I gruppi di trasformazioni sono specifici della interazione cui è soggetto
il sistema, e le operazioni rispetto cui il gruppo è chiuso (moltiplicazione ed inversione) debbono essere differenziabili, cosı̀ da avere un gruppo
di Lie. I gruppi di Lie associati ad ogni interazione sono riportati nella
MONOPOLI MAGNETICI IN FISICA QUANTISTICA
19
tabella sottostante:
INTERAZIONE GRUPPO DI LIE G ALGEBRA DI LIE G
elettromagnetica
nucleare debole
nucleare forte
U(1)
SU(2)
SU(3)
R
su(2)
su(3)
Il gruppo dei numeri complessi unimodulari U(1) è commutativo e
come scritto in (11) conduce ad una forma molto semplice della trasformazione di gauge per il potenziale. Tuttavia di seguito verrà presentato
il corretto formalismo [?] per le teorie di gauge del tipo Yang-Mills non
abeliane.
4.2. Fibrati principali ed associati. Innanzitutto, prima ancora di
costruire il fibrato vettoriale occorre partire dal fibrato principale.
Definizione:
un fibrato principale P(G, M) è l’insieme di:
• Una varietà differenziabile P (spazio totale) su cui agisce da
destra un gruppo di Lie G (gruppo di struttura)
• lo spazio quoziente M := P/G, ossia lo spazio delle classi d’equivalenza rispetto alla relazione p ∼ p 0 ⇔ ∃a ∈ G | p 0 =
pa
• una funzione continua suriettiva (la proiezione canonica) π :
P −→ M.
La proiezione canonica π : P −→ M è localmente un diffeomorfismo
(il ché assicura anche la differenziabilitá di M). Dato x ∈ M, ∃U ⊂ M
intorno aperto di x tale che π−1 (U) ≈ U × G, esiste un diffeomorfismo
φ : π−1 (U) −→ U × G, u 7→ (π(u), ψ(u)), dove ψ(ua) = ψ(x)a, ∀a ∈
G, x ∈ π−1 (U) è un diffeomorfismo.
20
NICCOLÒ PEDERZANI
φ
π−1 (U)
π
%
/
y
U×G
pU
P
U⊂M=
G
Per rendere consistente tale costruzione nelle regioni in cui due intorni
aperti del medesimo punto x si intersecano, diciamo Uα , Uβ ⊂ M, Uα ∩
Uβ 6= ∅ occorre che esista una trasformazione che mandi il punto di
−1
vista da Uα in quello di Uβ : in formule φ−1
α (x) = (x, a), φβ (x) =
(x, gαβ (x)b); le funzioni
(12)
gαβ : Uα ∩ Uβ −→ G
sono dette funzioni di transizione e rispettano la cosiddetta condizione
di cociclo: dati tre aperti Uα , Uβ , Uγ tali che Uα ∩ Uβ ∩ Uγ 6= ∅ allora
gαβ (z)gβγ (z)gγα (z) = Id,
∀z ∈ Uα ∩ Uβ ∩ Uγ
.
Si ricava inoltre che gαβ = [gβα ]−1 nel senso dell’elemento inverso nel
gruppo di struttura G.
Si definisce sezione globale di un fibrato principale una applicazione σ :
M −→ P tale che (π◦σ)(x) = x, ∀x ∈ M; i.e. una applicazione da M in
P che mantiene ogni x nella relativa fibra; se il dominio dell’applicazione
è ristretto ad un aperto U di M, la sezione si dirà locale, conservando
nel suo dominio le medesime proprietà di quella globale.
Per passare da una parametrizzazione all’altra, in caso di intersezione
tra due aperti, si ricorre ancora alle funzioni di transizione: date due
sezioni locali σα : Uα −→ P , σβ : Uβ −→ P per passare da una sezione
all’altra si ha, in Uα ∩ Uβ 6= ∅,
σβ (x) = gαβ (x)σα (x),
∀x ∈ Uα ∩ Uβ
Definizione: Un fibrato E(M, F, G, P) associato al fibrato principale
P(M, G) si compone di:
MONOPOLI MAGNETICI IN FISICA QUANTISTICA
21
• un fibrato principale P(M, G)
• una varietà F (la fibra standard) su cui G agisce a sinistra, ossia
esista una applicazione G × F −→ F,(a, ξ) 7→ aξ, cosı̀ da far
agire G su P × F come segue: a(u, ξ) = (ua, a−1 ξ)
In seguito si definisce E := (P×F)
come il quoziente rispetto alla relazione
G
0
0
d’equivalenza (u, ξ) ∼ (u , ξ ) ⇔ ∃a ∈ G | u 0 = ua, ξ 0 = a−1 ξ.
L’applicazione che manda (u, ξ) in π(u) induce una mappa πE : E −→
M, detta proiezione; per ogni punto x ∈ M esisterà un intorno U ⊂ M
con x ∈ U tale che π−1 (U) ≈ U × G. Facendo agire G su π−1 (U) × F
come segue:
b(x, a, ξ) 7→ (x, ab, b−1 ξ) ∀(x, a, ξ) ∈ U × G × F, b ∈ G .
Si ha che l’isomorfismo π−1 (U) ≈ U×F induce un isomorfismo π−1
E (U) ≈
−1
U × F. Richiedendo che πE (U) sia una sottovarietà di E, conferiamo
la differenziabilità a πE .
La definizione di sezione globale per un fibrato associato è analoga a
quella di un fibrato principale: è l’applicazione σ : M −→ E | πE ◦ σ ≡
IdM .
Sebbene un fibrato principale ammetta una sezione globale se e solo se
il fibrato è banale (i.e. lo spazio totale è prodotto cartesiano di due
varietà), per un fibrato associato vale il seguente:
Teorema: Sia E(M,F,G,P) un fibrato con varietà di base paracompatta e fibra F diffeomorfa a Rm . Sia inoltre A un sottoinsieme chiuso di
M, anche vuoto. Ogni sezione σE : A −→ E definita su A può essere
estesa ad una sezione definita su tutta M. In particolare se A è l’insieme vuoto, esiste una sezione di E definita su M.
Per ottenere un fibrato vettoriale, come fibra standard utilizziamo
Rk e facciamo agire il gruppo di struttura a sinistra in tal modo:
g(x, ~ξ) := (gx, ρ(g)~ξ) dove ρ è una rappresentazione del gruppo G
sullo spazio euclideo k-dimensionale. Come per il fibrato principale
costruiamo l’insieme delle classi d’equivalenza secondo la relazione
(x, ~x) ∼ (x 0 , ~x 0 ) ⇔ x 0 = gx , ~x 0 = ρ(g)~x;
M = (P × Rk )/G .
22
NICCOLÒ PEDERZANI
4.3. Connessioni su un fibrato associato. Definizione: un campo
vettoriale fondamentale è un campo vettoriale su P relativo al gruppo
di trasformazioni ad un parametro Rat con at = exp tA , A ∈ G, si
dimostra che per ogni elemento dell’algebra di Lie G del gruppo di
struttura esiste un ed un solo campo vettoriale appartenente all’algebra
X(P) dei campi vettoriali su P.
Definizione: dato un fibrato principale P(M, G), sia Gu il sottospazio di
Tu P tangente alla fibra in u. Una connessione Γ su un fibrato principale
P(M, G) è una associazione di un sottospazio Qu ⊂ Tu P ad ogni punto
u ∈ P con le seguenti proprietà:
• Tu P = Gu ⊕ Qu
• (Ra )∗ Qu = Qua , ∀u ∈ P, a ∈ G dove Ra è la traslazione destra
ossia la distribuzione è G-invariante
• la distribuzione u 7→ Qu è differenziabile
I sottospazi Gu e Qu vengono detti rispettivamente sottospazi verticale
ed orizzontale di Tu P. Ogni vettore tangente in u potrà esser unicamente scomposto nella somma di un vettore verticale (tangente alla
fibra passante per u) ed uno orizzontale.
Siccome l’algebra di Lie G relativa al gruppo G è chiusa rispetto a
somma di suoi elementi, moltiplicazione per uno scalare e parentesi di
Lie, avrà in particolare la struttura di spazio vettoriale e sarà possibile
definire una 1-forma differenziale con valori in G: scelta una base dell’algebra {ei i = 1, . . . , n}, l’espressione più generale di una tale forma
è
n
X
ω=
ωi ei
i=1
dove le ωi sono 1-forme differenziali su P. Una proposizione assicura
che, data una connessione Γ su P, la forma di connessione ω tale che
ω(X) = A (dove A è l’unico elemento di G che induce su P la componente verticale A∗ di X) esiste ed è unica .
La proiezione π : P −→ M induce una mappatura tra gli spazi tangenti: π : Tu P −→ Tπ(u) M
∀u ∈ P.
Una volta definita una connessione Γ su P(M, G), la proiezione diventa
MONOPOLI MAGNETICI IN FISICA QUANTISTICA
23
un isomorfismo tra lo spazio orizzontale Qu e Tπ(u) M.
Definizione
Il sollevamento orizzontale di un campo vettoriale X su M è l’unico
campo vettoriale X∗ ∈ X(P) | ∀u ∈ P, X∗u ∈ Qu e π(X∗u ) = Xπ(u) , ∀u ∈ P.
Data una parametrizzazione
un intorno coordinato U di
(x1 , . . . , xn ) di M, una base di Tx M sarà ∂x∂ i , i = 1, . . . , n , x∂i ∗, i = 1, . . . , n sarà
una base della distribuzione u 7→ Qu sul dominio π−1 (U).
Come per le sezioni locali è necessario preoccuparsi di come si esprima
la forma di connessione secondo un’altra parametrizzazione, nel caso
in cui x ∈ Uα ∩ Uβ 6= ∅. Sia {Uα } un ricoprimento aperto di M, con
i relativi diffeomorfismi φα : π−1 (Uα ) −→ Uα × G e la corrispondente
funzione di transizione ψαβ : Uα ∩ Uβ −→ G definita in ogni intersezione non vuota. Sia inoltre θ l’unica 1-forma invariante a sinistra a valori
in G, detta anche forma canonica, che soddisfa θ(A) = A , ∀A ∈ G.
Considerata una base E1 , . . . , En dell’algebra di Lie G, possiamo espriP
mere θ = ni=1 θi Ei .
Ponendo
n
X
ckij Ek ,
[Ei , Ej ] =
k=1
ckij
dove
sono le costanti di struttura dell’algebra G rispetto alla base
{Ei , i = 1, . . . , n}.
Si verifica cosı̀ che la derivata esterna su ogni componente della forma
canonica agisce in tal maniera:
1X k i
dθ = −
c θ ∧ θj
2 i,j=1 ij
n
k
derivante dall’equazione di Maurer-Cartan per i covettori di G:
1
dω(A, B) = − ω([A, B]), ω ∈ G∗ , A, B ∈ G .
2
Nelle intersezioni Uα ∩ Uβ 6= ∅ del ricoprimento aperto definiamo θαβ
come il pull-back di θ tramite la funzione di transizione ψαβ :
θαβ = ψ∗αβ θ .
Sia σα la sezione locale dell’aperto Uα ; porto la forma di connessione
24
NICCOLÒ PEDERZANI
ω sullo spazio di base M con il pull-back
ωα = σ∗α ω .
La relazione tra ωβ ed ωα in Uα ∩ Uβ 6= ∅:
ωβ = ad([ψαβ ]−1 )ωα + θαβ
.
Passiamo a definire la nozione di parallelismo su un fibrato principale.
Occorre innanzitutto definire il sollevamento di una curva x(t) contenuta in M ad una curva u(t) in P.
Chiamo τ un segmento di curva di classe C 1 in M con t ∈ [a, b].
Definizione
Il sollevamento orizzontale τ∗ = u(t) in P della curva τ è l’unica curva orizzontale (i.e. i cui vettori tangenti in ogni punto appartengano al sottospazio orizzontale della connessione Γ su P) e che soddisfa
π(u(t)) = x(t), ∀t ∈ [a, b].
La definizione di sollevamento orizzontale è la stessa per i campi vettoriali: dato X ∈ Tπ(x) M con curva integrale τ, si definisce X∗ , sollevamento in Tu P di X come l’unico campo vettoriale la cui curva integrale
è τ∗ , sollevamento di τ in P.
Una proposizione la cui dimostrazione si basa sull’esistenza ed unicità
della soluzione di un sistema lineare di ODE afferma che per ogni curva
τ in M eiste ed è unico il suo sollevamento orizzontale τ∗ in P. Grazie
a tale unicità possiamo definire il trasporto parallelo di fibre sul fibrato
principale P(M, G): sia τ = x(t), con t appartenente a qualsiasi sottoinsieme compatto di R (poniamo per semplicità [0,1]), una curva di
classe C 1 in M. Prendiamo ora un punto arbitrario nella fibra corrispondente π−1 (x(0)), sia u(0) tale punto. L’unico sollevamento orizzontale
τ∗ di τ passante per u(0) è tale che π(u(1)) = x(1). Facendo ora variare u(0) nella fibra corrispondente a x(0) otteniamo una mappa tra
le fibre π−1 (x(0)) e π−1 (x(1)) che manda u(0) 7→ u(1). Chiamiamo
questa mappa trasporto parallelo lungo la curva τ e lo denotiamo con
la stessa lettera greca τ.
Il fatto che si tratti di un isomorfismo è assicurato dalla commutazione
MONOPOLI MAGNETICI IN FISICA QUANTISTICA
25
del trasporto parallelo con l’azione del gruppo G agente su P, ovvero
τ ◦ Ra = Ra ◦ τ, ∀a ∈ G .
Per provarlo basta ricordare che, data una connessione Γ su P, il sollevamento manda ogni curva di M in una orizzontale in P, e la distribuzione
u 7→ Qu è G-invariante.
Proposizione: Se x(t) è una curva di classe C 1 in M, l’applicazione
inversa del trasporto parallelo τ, τ−1 è il trasporto parallelo della curva
x(1 − t). Se τ = x(t) è una curva da a a b e µ = y(t) una curva da
b a c, con a,b,c punti di M, il trasporto parallelo della curva composta
x(t) e y(t) è il trasporto parallelo τµ.
Con questa chiusura rispetto ad inversione e composizione si costruisce
il gruppo d’olonomia. Innanzitutto occorre definire lo spazio C(x) delle
curve chiuse, o loop, che cominciano e terminano in x. In virtù della
proposizione precedente, il trasporto parallelo di un loop in P è un isomorfismo della fibra π−1 (x) in se stessa, l’insieme dei trasporti paralleli
di C(x) forma un gruppo con le operazioni di composizione cammini
ed inversione, detto gruppo di olonomia di Γ con punto di riferimento x. Possiamo anche definire un gruppo di olonomia Φ(u) come il
sottogruppo di G, gruppo di struttura, che trasla allo stesso modo del
trasporto parallelo all’interno della fibra, per ogni automorfismo della
fibra si associa un elemento a ∈ G e la struttura di gruppo è ancora
una volta garantita dalla proposizione. C’è un unico isomorfismo che
renderà commutativo il seguente diagramma:
C(x)
{
Φ(x)
/
#
Φ(u)
Il gruppo d’olonomia è un gruppo di Lie.
Definiamo ora la forma di curvatura associata alla forma di connessione.
Definizione: Una r-forma ϕ definita sul fibrato principale P(M, G)
a valori in uno spazio vettoriale V si dice r-forma pseudotensoriale
orizzontale del tipo (ρ, V) se soddisfa le seguenti proprietà:
26
NICCOLÒ PEDERZANI
• R∗a ϕ = ρ(a−1 )ϕ, a ∈ G, dove ρ è una rappresentazione del
gruppo di struttura G sullo spazio V
• ϕ(X1 , . . . , Xr ) = 0 ogniqualvolta almeno uno tra gli argomenti
appartiene al sottospazio verticale di Tu P, tangente alla fibra in
u.
La forma Dϕ = (dϕ) ◦ h, dove h è il proiettore sullo spazio orizzontale
Qu , è detta derivata covariante esterna di ϕ.
La forma di connessione ω è una 1-forma pseudo-tensoriale a valori in
G e rappresentazione aggiunta, perciò detta di tipo (adG, G).
Definizione
Data una forma di connessione ω sul fibrato principale P(M, G), si
dice forma di curvatura la 2-forma
Ω := Dω .
Vale il seguente:
Teorema (Equazione di struttura): Sia ω la forma di connessione e
Dω = Ω la sua forma di curvatura, allora
1
(13) Ω(X, Y) = dω(X; Y) + [ω(X), ω(Y)]
2
∀X, Y ∈ Tu P, u ∈ P
.
Per la dimostrazione si rimanda al testo [?].
Scritta in componenti l’equazione di struttura (13) risulta:
(14)
r
1X i j
c ω ∧ ωk
Ω = dω +
2 j,k=1 jk
i
i
.
Dalla (14) è facile provare che DΩ ≡ 0, seconda identità di Bianchi.
Descriviamo infine il trasporto parallelo sul fibrato E(M, F, G, P) associato al fibrato principale P(M, G).
Il sottospazio verticale Fw , per ogni w ∈ E è il sottospazio di Tw E tangente alla fibra passante per w, il ché è possibile poichè E è sottovarietà
di P × F. Consideriamo l’applicazione che, fissato ξ ∈ F, manda v ∈ P
in vξ ∈ E; il sottospazio orizzontale sarà l’immagine di Qv secondo tale
applicazione.
Gli spazi verticale ed orizzontale sono ancora in somma diretta, e la
MONOPOLI MAGNETICI IN FISICA QUANTISTICA
27
distribuzione w 7→ Qw risulta indipendente dal punto (v, ξ) ∈ P × F.
Analogamente a quanto avviene nel fibrato principale P(M, G), il sollevamento orizzontale di una curva è l’applicazione che manda τ =
x(t) ∈ M in τ∗ = w(t) ∈ E ed inoltre πE (τ∗ ) = τ. Tale sollevamento
è unico.
Una sezione σ di E è definita in un aperto U di M se l’immagine di Tx M
attraverso σ è orizzontale per ogni x in U, ossia il trasporto parallelo
di σ(x(0)) lungo τ risulti σ(x(1)).
In un fibrato vettoriale, avendo la chiusura rispetto alle operazioni di
somma e moltiplicazione per funzione regolare sulla fibra standard, le
avremo anche nell’insieme delle sezioni Γ (E):
(σ1 + σ2 )(x) = σ1 (x) + σ2 (x)
(λσ)(x) = λ(σ(x))
∀σ1 , σ2 ∈ Γ (E), x ∈ M
∀λ ∈ R, σ ∈ Γ (E), x ∈ M .
La seconda proprietà vale anche nel caso in cui λ sia una funzione
λ : M −→ R.
˙ sia il suo
Definizione: sia σ una sezione definita sulla curva x(t) ed x(t)
vettore tangente a t fissato. La derivata covariante ∇x(t)
˙ σ di σ nella
˙ è definita da:
direzione di x(t)
∇x(t)
˙ σ = lim
h→0
1 t+h
[τ (σ(x(t + h))) − σ(x(t))]
h t
−1
dove τt+h
: π−1
t
E (x(t + h)) −→ πE (x(t)) indica il trasporto parallelo
della fibra π−1
E (x(t + h)) lungo x(t) da x(t + h) ad x(t).
−1
∇x(t)
˙ σ ∈ πE (x(t)) per ogni t e definisce una sezione di E lungo τ.
Per generalizzare la definizione consideriamo X ∈ X(M) e σ una sezione
di E definita in un intorno U di x. L derivata covariante ∇X σ di σ nella
direzione di X è (∇X σ)(x) = ∇X(x) σ. Tale definizione verifica le seguenti
proprietà:
Siano X,Y campi vettoriali su M, σ, σ1 , σ2 ∈ Γ (E) sezioni di E su M e
λ una funzione C ∞ (M), allora
(1) ∇X+Y σ = ∇X σ + ∇Y σ;
(2) ∇X (σ1 + σ2 ) = ∇X σ1 + ∇X σ2 ;
(3) ∇λX σ = λ∇X σ;
28
NICCOLÒ PEDERZANI
(4) ∇X (λσ) = λ∇X σ + (X(λ))σ.
Si noti che le proprietà (1),(2),(3),(4) possono essere espresse mediante
il pairing bilineare <, >: TM × T ∗ M tra campi ed 1-forme differenziali:
∇X σ :=< X, Dσ >
(D è la derivata covariante descritta in (9)), in modo da ritrovare le
stesse proprietà anche per fibrati vettoriali non costruiti a partire da
un fibrato associato.
La definizione di connessione su un fibrato principale può quindi essere
data in tre modi equivalenti: come distribuzione u 7→ Qu del sottospazio orizzontale, come 1-forma ω a valori nell’algebra di Lie G o come
suo pull-back ω̃ = σ∗ ω tramite la sezione σ : M −→ P. Di connessioni
in generale ne esisteranno più d’una, formando uno spazio vettoriale
infinito dimensionale.
Il pull-back della differenza
σ∗α (ω 0 − ω) = Aα : Tx M −→ adP
dove adP è il fibrato associato E(P, M, G, G) e la fibra standard è isomorfa all’algebra di Lie del gruppo di struttura G, definisce a sua
volta una sezione di M su adP. Possiamo finalmente definire una
trasformazione di gauge:
Definizione: dato un fibrato principale P(M, G), si dice trasformazione
di gauge un automorfismo di P equivariante (Φ(pg) = Φ(p)g, ∀p ∈
P, g ∈ G) tale che π(Φ(p)) = π(p). Nei casi trattati successivamente
il fibrato associato sarà R4 × C con gruppo di struttura U(1) (i complessi unimodulari). La forma di connessione sarà il potenziale vettore
P
A = 4i=1 Ai dxi ; dall’equazione di struttura (13) si calcola il campo
magnetico B o forza di gauge:
B = dA + A ∧ A .
4.4. Coomologia di C̆ech e de Rham. Talvolta per studiare gli
aspetti globali di varietà differenziabili conviene utilizzare metodi topologici, in particolare la coomologia.
V
Una volta costruite le potenze esterne p (M) (dette anche algebre di
MONOPOLI MAGNETICI IN FISICA QUANTISTICA
29
Grassman) partendo dal fibrato vettoriale TM di una varietà M si può
parlare di teoria coomologica di de Rham.
Definizione: si dice p-simo gruppo di coomologia di de Rham lo spazio
vettoriale quoziente
HpdR (M) =
{p − forme chiuse}
{p − forme esatte}
.
Gli elementi di tale gruppo di coomologia sono classi di equivalenza:
ω ∼ ω 0 ⇔ ω = ω 0 − dξ,
∀ω, ω 0 ∈ ∧p (M), ξ ∈ ∧p−1 (M)
[ω] = {ω 0 ∈ ∧p (M) | ω 0 − ω forma esatta}
.
Per i nostri scopi conviene introdurre una teoria coomologica che tratti
le forme definite sulle intersezioni di aperti U del ricoprimento di M. Il
fatto di concentrarsi sul ricoprimento anzichè sulle forme differenziali
non produce informazioni diverse: infatti le teorie coomologiche sono
isomorfe [?].
Scegliamo un ricoprimento della varietà M, in particolare possiamo
considerare il suo atlante A = {(Uα , ϕα , Vα )}α∈I di carte locali. Nella
trattazione seguente si presume che si tratti di un buon ricoprimento,
i.e. una famiglia di aperti contenuti in M {Uα , α ∈ I} tali per cui
l’intersezione non vuota di un qualsiasi numero di essi sia semplicemente connessa. Per costruire la coomologia di C̆ech occorrono prima
le seguenti:
Definizione
Per ogni p > 1, un simplesso standard in Rp è l’insieme dei punti
p
X
∆p = (a1 , . . . , an ) ∈ Rp | ai > 0,
ai 6 1
.
i=1
Per p = 0 si pone ∆0 = {0}.
Si possono mappare intorni di simplessi standard su una varietà differenziabile M tramite applicazioni σ : ∆p −→ M dette simplessi singolari differenziabili. Considero ogni aperto U come centrato in uno
0-simplesso singolare (un punto p della varietà M), ossia p = σ(0), 0 ∈
Rn coordinato; l’intersezione di due tali insiemi aperti è un 1-simplesso,
30
NICCOLÒ PEDERZANI
Figura 5. Mappatura di un simplesso singolare
differenziabile su M
ossia il segmento che congiunge i due centri, e cosı̀ via per i gradi superiori come illustrato sotto. Ad ogni p-simplesso posso associare una
Figura 6. Aperti associati ad un: a) 0-simplesso, b)
1-simplesso, c) 2-simplesso
q-forma differenziale, regolare sul simplesso. Chiamo l’insieme delle qforme definite sui p-simplessi relativi all’atlante (ricoprimento) A come
V
Cp (A, q (M)).
V
Per esempio C0 (A, 1 (M)) è l’insieme delle 1-forme regolari sugli aperti
V
V
Uα dell’atlante, mentre C1 (A, 1 (M)) e C0 (A, 2 (M)) sono rispettivamente le forme differenziali definite sulle intersezioni Uα ∩ Uβ 6= ∅ e
Uα ∩ Uβ ∩ Uγ 6= ∅ del ricoprimento A.
Per terminare la costruzione della teoria coomologica occorre introdurre un operatore nihilpotente di indice 2: tale operatore è l’operatore di
cobordo δ : Cp −→ Cp+1 che gode della proprietà δ2 ≡ 0 ed agente in
MONOPOLI MAGNETICI IN FISICA QUANTISTICA
31
tale modo:
δ {Aα } = {Aα − Aβ }
δ {Bαβ } = {Bαβ + Bβγ + Bγα }
δ {Cαβγ } = {Cαβγ + Cβγδ + Cγδα + Cδαβ }
.
L’insieme dei p-simplessi α tali che δα = 0 (ossia appartenente al
nucleo di δ), detti p-cicli, si indica con Zp (M), mentre i p-simplessi
γ tali per cui esiste un (p-1)-simplesso β tale che γ = δβ si dicono
p-bordi e costituiscono l’insieme denotato con Bp (M).
Definizione
Il p-simo gruppo di coomologia di C̆ech è lo spazio quoziente
(15)
Hp (M, R) :=
Zp (M)
Bp (M)
insieme delle classi d’equivalenza dei p-cicli che differiscono per un pbordo.
Il legame tra coomologia di de Rham e di C̆ech risulta più evidente
osservando la seguente tabella [?]:
V2
V
V
V
(M) C0 (A, 2 (M)) C1 (A, 2 (M)) C2 (A, 2 (M))
V1
V
V
V
(M) C0 (A, 1 (M)) C1 (A, 1 (M)) C2 (A, 1 (M))
V0
V
V
V
(M) C0 (A, 0 (M)) C1 (A, 0 (M)) C2 (A, 0 (M))
d↑δ→
C0
C1
C2
Nel caso più specifico in cui si studi la forma di connessione su una
varietà M, la si può identificare con il potenziale dell’interazione elettromagnetica:
V2
(M) {dAα } = {Bα }
V1
{Aα }
δ {Aα } = {dψαβ }
(M)
V0
{ψαβ }
(M)
δ {ψαβ } = {cαβγ }
d↑δ→
C0
C1
C2
L’utilità di questa costruzione matematica consiste nella possibilità di
trovare le ostruzioni topologiche per una forma chiusa ad essere esatta,
32
NICCOLÒ PEDERZANI
ossia indica quali siano le proprietà topologiche della varietà che rendono non nullo il flusso magnetico uscente da detta varietà.
5. Monopoli secondo la teoria di gauge
5.1. Fibrati coordinati. Utilizzando due carte {UN , US } sullo spazio
R3 ×C (fibrato banale coordinato) [?],[?] si possono dare esplicitamente
le espressioni AN , AS del potenziale vettore generato da un monopolo
magnetico.
La scelta di due carte differenti è dettata dal fatto che il potenziale A
generato da un monopolo magnetico non può essere su tutto R3 ; se cosı̀
non fosse, per il lemma di Schwartz, applicabile alle funzioni di classe
almeno C 1 , A verificherebbe 0 ≡ ∇·∇×A = ∇·B. Il campo magnetico
del monopolo
~r
B=g 3
r
V2 3
può anche essere scritto nella base di (R ) come 2-forma di curvatura
g
B = 3 (xdy ∧ dz + ydz ∧ dy + zdx ∧ dy) .
r
Tale definizione del campo B rispetta l’equazione dB = ddA = 0; per
renderlo più evidente conviene passare a coordinate sferiche:
x = sin θ cos ϕ
y = sin θ sin ϕ
r ∈ R+ , ϕ ∈ [0, 2π], θ ∈ [0, π]
z = cos θ
B = g sin θ dθ ∧ dϕ .
Un possibile potenziale vettore A tale che dA=B potrebbe essere
A = −g cos θ dϕ ,
singolare lungo tutto l’asse z. Stavolta tale singolarità è più evidente
tornando a coordinate cartesiane; il potenziale vettore si scrive, infatti,
come
gz ydx − xdy
A=
r x2 + y 2
MONOPOLI MAGNETICI IN FISICA QUANTISTICA
33
singolare lungo i punti del tipo (0, 0, z) con z reale. Tale retta è la cosiddetta stringa di Dirac, che trasporta il flusso magnetico dal monopolo
all’antimonopolo. L’espressione di B coincide, a meno della costante
moltiplicativa g, alla forma di volume della sfera S2 , perciò il flusso del
campo magnetico uscente da S2 sarà
Z
B=g ,
S2
mentre per il teorema di Stokes otterremmo 0, perchè la sfera non ha
bordo.
Senza bisogno di introdurre la stringa di Dirac si può trovare un potenziale regolare per ciascuno dei due aperti UN , US di R3 ed una relazione
(la ricalibratura o trasformazione di gauge) tra le due definizioni, valida in UN ∩ US 6= ∅.
Definisco quindi UN , US come:
UN = R3 \ (0, 0, z) ∈ R3 | z > 0
US = R3 \ (0, 0, z) ∈ R3 | z 6 0
,
su cui sono date le forme di connessione, una volta introdotto il versore
ϕ
^ = − sin ϕ x̂ + cos φ ŷ
g(1 − cos θ)
ϕ̂
r sin θ
singolare lungo la retta θ = π e
AN =
−g(1 + cos θ)
ϕ̂
r sin θ
singolare per θ = 0, si controlla facilmente che
g
∇ × AN = ∇ × AS = 2 r̂ = B
r
AS =
Nell’intersezione UN ∩ US = R3 \ SpanR {(0, 0, 1)} le due espressioni
del potenziale vettore differiscono l’una dall’altra come nell’equazione
(11), ovvero, coerentemente con la teoria dell’elettrodinamica classica,
per il differenziale esterno d (o gradiente ∇) di una certa funzione
34
NICCOLÒ PEDERZANI
Λ : R3 → R:
2g
ϕ̂ ,
r sin θ
gradiente in coordinate sferiche di 2gϕ.
Il flusso uscente da una generica superficie chiusa contenente il monopolo magnetico (e.g. la sfera S2 ) è, sfruttando consecutivamente il teorema di Stokes, l’integrale della funzione di transizione lungo l’equatore
E:
I
Z
B · dS = (AN − AS )ds = [2gϕ]2π
(16)
0 = 4πg
AN − AS =
S2
E
Infine, la funzione d’onda Ψ, sezione del fibrato banale R3 × C, in
Figura 7. Schema dell’intergale (16)
presenza di una trasformazione di gauge diventa (12):
à −→ A + dΛ
ieΛ
Ψ̃ −→ e h̄c Ψ .
Siccome la funzione d’onda deve avere un valore definito ∀θ ∈ (0, π),
chiediamo che mantenga lo stesso valore dopo un giro attorno all’equatore. Perciò dovrà essere
4πge
= 2πn
h̄c
MONOPOLI MAGNETICI IN FISICA QUANTISTICA
35
con n intero, proprio la quantizzazione di Dirac (8) per la carica magnetica.
5.2. Quantizzazione topologica. Questa sezione è tratta interamente da [?]. Si supponga di avere un monopolo nel centro di una sfera S2 ,
la lagrangiana della particella con carica e vincolata a muoversi sulla
superficie sarà
2
1
dxµ
µν
1 dxµ L= 2
+
F
F
+
A
µν
µ
dt 4e2
dt
dove i tetra-vettori van contratti secondo la regola di Einstein, sommando sull’indice ripetuto. Mi interesso solo del termine che considera
gli effetti del potenziale vettore accoppiato alla velocità della particella,
o termine di Lorentz.
Dato un buon ricoprimento {Uα , Uβ , . . .} di S2 , per calcolare l’azione
R
I = Ldt lungo un percorso che attraversa due intorni coordinati Uα ,
Uβ tali che Uα ∩ Uβ 6= ∅ , scelto un punto qualsiasi P nell’intersezione
(vedi figura) l’azione del solo termine di Lorentz sará
Figura 8. Esempio di intersezione
ZF
IP =
ZP
Aα +
P
Aβ
,
I
tale definizione risulta perciò dipendente dal punto P scelto nell’intersezione Uα ∩ Uβ .
Infatti, considerando un altro punto Q ∈ Uα ∩ Uβ , si ottiene
ZQ
(17)
IP − IQ = (Aα − Aβ ) .
P
36
NICCOLÒ PEDERZANI
Pongo ora la trasformazione di gauge:
Aα − Aβ = dψαβ
le due 1-forme Aα , Aβ , regolari sui rispettivi 1-simplessi, differiscono
per una 1-forma esatta; Aα ed Aβ appartengono alla stessa classe di
coomologia.
Da (17) ottengo IP − IQ = ψαβ (Q) − ψαβ (P), quindi
IP + ψαβ (P) = IQ + ψαβ (Q) = I
,
indipendente dal punto scelto nell’intersezione.
ZQ
ZI
(18)
I=
Aα + ψαβ (Q) + Aβ
F
Q
il significato dell’equazione (18) alla luce degli integrali di cammino
di Feynmann è la seguente: la probabilità di raggiungere F partendo
da I è il prodotto (somma all’esponente fattorizza gli esponenti) delle
probabilità di giungere a Q partendo da I sotto l’effetto del potenziale
Aα , cambiare potenziale con una trasformazione di gauge Aβ = Aα −
dψαβ e proseguire fino ad F sotto l’effetto del potenziale Aβ . Fino a
questo punto non v’è nulla di nuovo rispetto al gauge della funzione
d’onda descritto nel paragrafo precedente. La parte interessante nasce
quando si considera l’intersezione non vuota di tre aperti (vedi figura).
Per giungere all’espressione di I posso dapprima non curarmi della
Figura 9. Esempio di tripla intersezione
presenza del terzo aperto Uγ e riscrivere l’azione lungo il segmento
IF come in (18), successivamente considero il solo Uγ ed utilizzo le
MONOPOLI MAGNETICI IN FISICA QUANTISTICA
37
trasformazioni di gauge nella sua intersezione con Uα ∩ Uβ .
Si ha allora che
ZQ
ZR
ZP
ZR
ZR
Aα +
Aβ = (Aα − Aγ ) + (Aγ − Aβ ) + Aγ =
Q
P
Q
Q
P
ψαγ (E) − ψαγ (Q) + ψγβ (F) − ψγβ (Q)) .
E’ stata aggiunta e tolta una stessa quantitá per poter scrivere l’azione
tra P ed R in soli termini di Aγ ; siccome I è indipendente dalla scelta di
Q ∈ Uα ∩Uβ ∩Uγ , lo sarà anche dalle scelte di E ed F. Tenendo presente
che ψαβ = −ψβα si ottiene l’espressione per l’azione in presenza di
tripla intersezione:
ZP
ZR
ZF
I = Aα + ψγα (R) + Aγ + ψβγ (P) + Aβ +
R
(19)
P
I
+ψβα (Q) + ψγβ (Q) + ψαγ (Q) .
Dalla definizione della trasformazione di gauge, risulta
d(ψβα + ψγβ + ψαγ ) =
= Aβ − Aα + Aγ − Aβ + Aα − Aγ = 0
per cui, essenedo gli aperti diffeomorfi alla palla aperta in R2 , vale il lemma di Poincaré secondo cui in un aperto stellato una forma
differenziale è chiusa ⇔ è esatta, cosı̀
ψβα + ψγβ + ψαγ = cαβγ
dove i 2-cocicli cαβγ sono costanti correlate alle proprietà topologiche
(15) di S2 , o qualsiasi altra superficie omeomorfa ad essa.
i
Affinchè la teoria sia consistente, la quantità e h̄ I deve essere la stessa per tutte le scelte di potenziale vettore, perciò le costanti cαβγ su
ogni triplo overlap debbono rispettare certe condizioni, in particolare
occorrerà che
(20)
cαβγ = 2π × intero .
38
NICCOLÒ PEDERZANI
Calcolo ora il flusso di F = dA attraverso la sfera che contiene il
monopolo magnetico: sfruttando il teorema di Stokes (3), scrivo
Z
XZ
XI
F=
F=
A
S2
∆αβγ ∆αβγ
∆αβγ ∂∆αβγ
dove la somma è intesa su tutte le triple intersezioni non vuote del
ricoprimento.
Il contributo al flusso magnetico dato dal singolo 2-simplesso è [?]:
Z
I
1
(21)
F=
(Aα + Aβ + Aγ ) =
3 ∆αβγ
∆αβγ
1
[(χαβ + χβγ + χγα )(α) + (χαβ + χβγ + χγα )(β) + (χαβ + χβγ + χγα )(γ)]+
3
1
− {χαβ (α) + χαβ (β) + χβγ (β) + χβγ (γ) + χγα (γ) + χγα (α)} +
2
Z
Z
Z
1
+
(Aα + Aβ ) +
(Aβ + Aγ ) +
(Aγ + Aα )
2 αβ
βγ
γα
da cui si ottiene, data la costanza nei tripli overlap della funzione cαβγ :
Z
X
F=
cαβγ
(22)
S2
∆αβγ
La prova di tale risultato è riportata nell’appendice A.
Confrontando le due equazioni (22) e (20) ottengo nuovamente la condizione di quantizzazzione per la carica di Dirac:
cαβγ = 2πnαβγ
6. Quantizzazione magnetica su T2
Si applica ora quanto scritto nelle sezioni precedenti ad un toro T 2 =
S1 × S1 , superficie di rotazione chiusa non semplicemente connessa (il
suo gruppo fondamentale è Π(T 2 ) = Π(S1 )·Π(S1 ) = Z×Z). Un metodo
comodo per rappresentarlo, anziché esprimerlo come luogo degli zeri
p
dell’equazione (R − x2 + y2 )2 + z2 − r2 = 0, è identificarlo come spazio
MONOPOLI MAGNETICI IN FISICA QUANTISTICA
39
quoziente del piano euclideo rispetto alla relazione d’equivalenza
(x + m, y + n) ∼ (x, y) ∀x, y ∈ R, m, n ∈ Z
ovvero T 2 = R2 /Z2 . Si rappresenta, allora, come un quadrato di lato L
con le seguenti identificazioni:
(x, L) = (x, 0)
∀x ∈ [0, L]
(L, y) = (0, y)
∀y ∈ [0, L]
Figura 10. Visualizzazione di T 2 come superficie di
rotazione e come spazio quoziente
Ricopro il toro di aperti esagonali {1, . . . , 9}, in modo tale che le triple
intersezioni siano ciascuno dei triangoli contenuti all’interno del perimetro del quadrato (semplicemente connessi). Ogni intorno è aperto,
dunque i lati dell’esagono non sono da considerarsi come intersezioni.
Il numero al centro di ogni esagono verrà usato per identificare l’aperto esagonale corrispondente. Il potenziale vettore, coincidente con la
forma di connessione su T T2 è definita, in coordinate locali, da
A = Bxdy .
Di conseguenza, la forza di gauge (2-forma di curvatura) è
dA − A ∧ A = Bdx ∧ dy .
Bisogna quindi scrivere la trasformazione di gauge che descriva il comportamento del potenziale vettore quando l’intorno esce dal quadrato
che rappresenta il toro e si ripiega lungo il lato opposto.
40
NICCOLÒ PEDERZANI
Figura 11. Toro a buon ricoprimento, è stato rappresentato in coordinate non ortogonali per ottimizzarne la
visualizzazione
Con un calcolo diretto si trova che solo uno dei 2-cocicli cα βγ è non
nullo; tale cociclo è quello corrispondente al triangolo con vertici nei
punti 9,7 e 3:
dχ39 = A3 − A9 = B L dy
0 < x <
L
3
2L < y <
3
2L < x < 4L
3
3
dχ97 = A9 − A7 = 0
0 < y < L
3
0 < x <
dχ73 = A7 − A3 = −B L dy
0 < y <
4L
3
L
3
L
3
quindi, sommando:
c397 = χ39 + χ97 + χ73 = B L (y + L − y) = BL2
Da (20)
Z
Bdx ∧ dy =
T2
X
cαβγ = c973 = BL2 = 2πZ
αβγ
ovvero la regola di quantizzazione Eq.(8) di Dirac per la carica magnetica.
MONOPOLI MAGNETICI IN FISICA QUANTISTICA
41
7. Ricerca di monopoli
Dall’equazione (8) si ricavano alcuni dati importanti circa queste
nuove ipotetiche particelle chiamate monopoli magnetici: il quanto di
carica del monopolo magnetico vale
g ≈ 68.5e ,
mentre la massa, supponendo uguali i raggi di elettrone e monopolo
magnetico
e2
g2
re =
=
= rg ,
me c2
mg c2
risulta essere
mg ≈ 4700me .
Le stesse considerazioni valgono per la costante d’accoppiamento: se
e2
αe = h̄c
allora
g2
≈ 4700αe
αg =
h̄c
analogamente a quanto accade per la massa.
I principali metodi per rintracciare la presenza di monopoli magnetici
sono i seguenti: nell’interazione con la materia il monopolo magnetico può essere catturato da un nucleo e dare vita ad un M-nucleo
[?], soprattutto se il bersaglio è composto da atomi ad alto rapporto
giromagnetico. La formazione di un M-nucleo avverrebbe secondo la
reazione
M + p → (M + p)legato + γ .
I principali strumenti di rilevamento sfruttano le correnti indotte dal
passaggio di un monopolo magnetico in una spira di materiale superconduttore, accoppiato con un rilevatore SQUID [?]; utilizzando una
serie di N spire superconduttrici coassiali, detta L la loro induttanza, la
variazione di corrente dovuta al passaggio di un monopolo magnetico è
∆I = 4π g/L = 2 ∆ I0
dove ∆I0 è la variazione di corrente circolante nella spira ottenuta aumentando di una unità elementare il flusso. Tale tipologia di rilevatore
42
NICCOLÒ PEDERZANI
è in grado di rivelare il monopolo magnetico qualunque sia la sua velocità.
Usando contatori a scintillazione possono essere rilevati in maniera soddisfacente solo i monopoli magnetici con un coefficiente relativistico
β < 10−4 , mentre se 10−3 < β < 10−1 le misurazioni risultano falsate
da un effetto di saturazione.
In rilevatori a gas (73 parti di elio, 27 di n-pentano) si sfrutta l’eccitazione dell’elio che interagisce con monopoli magnetici; si osserva infatti
che l’atomo di elio passa ad uno stato metastabile con ∆E ≈ 20eV. Il
gas n-pentano serve per rivelare tale energia, dal momento che l’energia
necessaria per ionizzare la sua molecola è all’incirca 10eV.
Infine i rilevatori NTD (Nuclear Track Detectors) possono rivelare il
passaggio di particelle fortemente ionizzanti, come, per l’appunto, i
monopoli magnetici. NTD misura la perdita di energia all’interno di
una regione cilindrica (circa 10nm di diametro) attorno alla traiettoria
della particella che lo attraversa. Tali dispositivi sono in grado di captare il segnale dovuto al passaggio di un monopolo magnetico avente
una sola unità di carica magnetica ed a velocità β < 10−3.
Si è anche provato a produrre monopoli magnetici relativistici tramite
acceleratori di particelle. Al Fermilab, usando un rilevatore a scintillazione ed un NTD, con scontri pp̄ ripetuti per mesi, non è stato rilevato
alcun monopolo magnetico con massa inferiore a 850GeV, con limite
superiore della sezione d’urto a σmin ≈ 2 · 10−34 cm2 . Facendo scontrare
elettroni e positroni (urto eē) sono state sondate tutte le energie inferiori a 102GeV, con limite per la sezione d’urto σmin ≈ 5 · 10−37 cm2 .
Altri esperimenti, come CERN SPS sono detti indiretti: protoni con
una energia di 450GeV vengono lanciati contro polvere di tungsteno,
in prossimità di un solenoide che produce un campo magnetico pulsante di circa 200kGauss, sufficienti per estrarre ed accelerare eventuali
monopoli magnetici prodotti. Un altro esperimento indiretto è stato
compiuto al Tevatron del Fermilab: supponendo che i monopoli magneitci possano essere catturati da microscopici cilindri di berillio ed
alluminio, vengono fatti passare attraverso bobine superconduttrici collegate ad un interferometro SQUID, senza però riuscire a rilevare alcun
MONOPOLI MAGNETICI IN FISICA QUANTISTICA
43
monopolo magnetico con energia inferiore a 285GeV.
Nel grafico riportato qui sotto sono elencati i principali esperimenti,
diretti ed indiretti, atti a rilevare la presenza di monopoli magnetici,
con relativi limiti di massa e sezione d’urto. Non avendo a dispo-
sizione sulla Terra acceleratori di particelle più potenti, si ricorre ai
raggi cosmici d’alta quota. Si osserva che facendo incidere tali raggi
su una lastra metallica si ottengono eventi di emissione di fotoni con
energie fino a 1011 GeV. Tale energia sarebbe eccessiva per gli eventi
multifotone, perciò si ipotizza che sia dovuta alla produzione monopoloantimonopolo magnetico, che essendo molto energetico rilascia fotoni
durante la bremsstrahlung.
La ricerca di eventi a multifotone artificiali è stata portata avanti all’I√
SR con scontri tra protoni con energia nel centro di massa s = 53GeV
mentre al Fermilab si sono sfruttati urti protone-antiprotone a 1.8TeV.
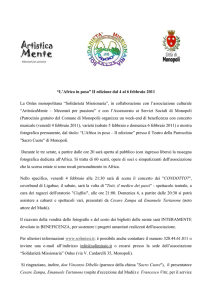
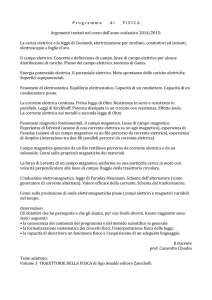
Il diagramma di Feynmann dell’urto è riportato sotto; nell’interazione le due particelle interagiscono tramite il campo elettromagnetico
emettendo fotoni virtuali (il fotone è il mediatore del campo elettromagnetico) che scalzano dal vuoto due monopoli magnetici virtuali, i
quali si annichiliscono a vicenda producendo una coppia di fotoni reali.
L’esperimento ha portato il limite inferiore della massa del monopolo
44
NICCOLÒ PEDERZANI
Figura 12. Diagramma di Feynmann per la creazione
monopolo antimonopolo in un processo di urto p − p̄
magnetico ad 850GeV.
Di seguito è riportato un grafico riassuntivo degli esperimenti a scattering multifotone, con relativi limiti inferiori di massa e sezione d’urto.
Infine, l’ultima serie di esperimenti atti a stabilire l’esistenza di mono-
poli magnetici prevede lo studio di campioni provenienti dallo spazio,
aventi una maggior probabilità di esser investiti da radiazioni cosmiche
ed aver cosı̀ intrappolato nella loro struttura la particella cercata. Sono
stati fatti passare attraverso una bobina superconduttrice collegata al
rilevatore SQUID meteoriti, scisti, minerali di ferro e ferromanganese,
per un totale di 331kg di materiale, senza però rivelare la presenza di
MONOPOLI MAGNETICI IN FISICA QUANTISTICA
45
alcun monopolo magnetico.
8. Conclusioni
La compatibilità di eventuali monopoli magnetici con la teoria quantistica è stata provata usando come ipotesi i soli postulati. L’equazione
(8) che lega carica magnetica ed elettrica è stata derivata in vari modi,
i più recenti si affidano alla teoria di gauge e non richiedono nemmeno
il veto di Dirac sulla non osservabilità della stringa lungo cui A è singolare. In un primo tempo, all’epoca della stesura del suo articolo [?]
lo stesso Dirac, seppur ignorando le moderne teorie di gauge, si sarebbe meravigliato se la natura non avesse provvisto a fornire le sorgenti
anche al campo magnetico. Col passare del tempo ed il fallimento degli
esperimenti anche Dirac venne assalito dal pessimismo circa una possibile scoperta di carica magnetica:
I am inclined now to believe that monopoles do not exist. So
many years have gone by without an encouragement from the
experimental side.
Ciò non di meno confidiamo in nuovi esperimenti. Si tenga presente che la regola di quantizzazione lega il prodotto dei quanti di carica
ad un intero, perciò tanto più piccola è la carica elementare elettrica,
tanta più energia servirà per separare due monopoli di carica opposta,
perchè la loro costante d’accoppiamento cresce in maniera inversamen1
e2
' 137
. Quindi un eventuale rilevamento di
te proporzionale ad α = h̄c
monopolo magnetico porterebbe ulteriori informazioni sul valore minimo della carica elettrica, per ora fissato a 1/3e posseduta dai quark
down,strange,bottom.
46
NICCOLÒ PEDERZANI
Appendice A. Prova relazione flusso-cociclo (5.2.22)
Un metodo per giungere al risultato è il seguente:
Figura 13. Triangolazione sul piano ed intorni
esagonali con triple intersezioni
1
3
I
(Aα + Aβ + Aγ ) =
∆αβγ
Z
1
Aα + dχγα Aβ + dχγβ
= [ (Aα + Aβ +
+
)+
3 αβ
2
2
Z
Aβ + dχαβ Aγ + dχαγ
+
(Aβ + Aγ +
+
)+
2
2
βγ
Z
Aγ + dχγβ Aα + dχβα
+
)] =
+ (Aγ + Aα +
2
2
γα
Z
Z
Z
=
(Aα + Aβ ) +
(Aβ + Aγ ) +
(Aγ + Aα )
αβ
βγ
γα
1
[χγα (β) − χγα (α) + χγβ (β) − χγα (α) + χαβ (γ) − χαβ (β)+
6
+χαγ (γ) − χαγ (β) + χbetaγ (α) − χβγ (γ) + χβα (α) − χβα (γ)] =
per far risultare più comprensibile conviene addizionare e sottrarre 2
MONOPOLI MAGNETICI IN FISICA QUANTISTICA
47
volte le parentesi quadre che contengono le χ:
Z
Z
Z
=
(Aα + Aβ ) +
(Aβ + Aγ ) +
(Aγ + Aα )+
αβ
βγ
γα
1
[3χγα (β) − 2χγα (β) + 2χγα (α) − 3χγα (α) + 3χγβ (β) − 2χγβ (β)+
6
+2χγα (α) − 3χγα (α) + 3χαβ (γ) − 2χαβ (γ) + 2χαβ (β) − 3χαβ (β)+
+3χαγ (γ) − 2χαγ (γ) + 2χαγ (β) − 3χαγ (β) + 3χβγ (α) − 2χβγ (α)+
+2χβγ (γ) − 3χβγ (γ) + 3χβα (α) − 2χβα (α) + 2χβα (γ) − 3χβα (γ)] =
si ricava, raccogliendo come in (21)
1
[(χαβ + χβγ + χγα )(α) + (χαβ + χβγ + χγα )(β) + (χαβ + χβγ + χγα )(γ)]+
3
1
− {χαβ (α) + χαβ (β) + χβγ (β) + χβγ (γ) + χγα (γ) + χγα (α)} +
2
Z
Z
Z
1
(Aγ + Aα )
(Aβ + Aγ ) +
(Aα + Aβ ) +
+
2 αβ
γα
βγ