Appunti su
RIDUTTORI A VITE
2
Proprietà dell’autore - tutti i diritti riservati
nessuna riproduzione totale o parziale ne' l'utilizzo di qualsiasi informazione in esso contenuta sono permessi senza autorizzazione scritta
In queste poche pagine si raccolgono
alcune considerazioni cinematiche e dinamiche
sui riduttori epicicloidali.
Questi appunti, attualmente ancora in bozza,
no pretendono di essere esaurienti o di sostituire trattazioni
riportate in libri di testo, ma sperano di essere utili a chi studia l’argomento.
3
Proprietà dell’autore - tutti i diritti riservati
nessuna riproduzione totale o parziale ne' l'utilizzo di qualsiasi informazione in esso contenuta sono permessi senza autorizzazione scritta
4
Proprietà dell’autore - tutti i diritti riservati
nessuna riproduzione totale o parziale ne' l'utilizzo di qualsiasi informazione in esso contenuta sono permessi senza autorizzazione scritta
1.1 - Generalità
I riduttori a vite senza fine – ruota elicoidale sono anche detti riduttori a vite. Essi hanno la
possibilità di collegare alberi ad asse sghembo con rapporti di trasmissione elevati, dell’ordine del
centinaio, con un intervallo che va dalla metà di questo valore, al doppio. Altri tipi di riduttori che
possono offrire rapporti di trasmissione di questo ordine di grandezza sono i riduttori epicicloidali,
convenzionali o meno, ad uno o più stadi. Altri parametri fondamentali da tenere in considerazione,
per la scelta, sono il rendimento, la rigidezza, i giochi e gli ingombri.
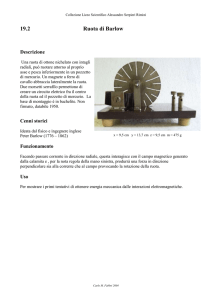
In figura 1.1 si vede un tipico schema di riduttore a vite con la sua scatola.
1 - albero di ingresso, motore
2 – vite
3 – ruota elicoidale
4 – albero di uscita, condotto
5 - scatola
1
2
3
4
5
Figura 1.1 – riduttore a vite
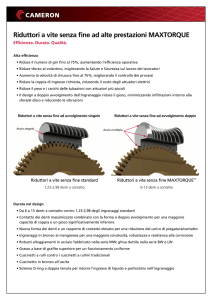
I riduttori a vite sono realizzati con accoppiamento vite-ruota cilindrica, hanno bassi rendimenti
rispetto ad altri accoppiamenti di ruote dentate cilindriche, hanno la possibilità di realizzare
facilmente la condizione di irreversibilità del moto.
1.2 - Rapporto di trasmissione
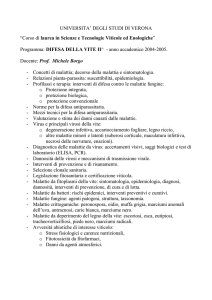
Nel caso, frequente, di assi sghembi e perpendicolari di vite e ruota, in un piano perpendicolare
all’asse della ruota e contenete l’asse della vite, si ha schematicamente la situazione di figura 1.2.
Osservando il sistema si ha, sul piano contenente l’asse della vite, una situazione equivalente ad una
dentiera (vite) che ingrana con una ruota dentata cilindrica a denti diritti (ruota), come quella
rappresentata in figura 1.2c. A fronte di una traslazione della dentiera equivalente, 1, ad una
velocità V si ha una rotazione della ruota, 2, alla velocità angolare ω2.
5
Proprietà dell’autore - tutti i diritti riservati
nessuna riproduzione totale o parziale ne' l'utilizzo di qualsiasi informazione in esso contenuta sono permessi senza autorizzazione scritta
Siano:
r1 raggio della primitiva della vite 1
r2 raggio della primitiva della ruota 2
z1 numero di principi della vite
z2 numero di denti della ruota
Pa passo assiale dell’elica della vite misurato sulla primitiva
Pe=(z1 Pa) passo dell’elica della vite della vite misurato sulla primitiva
P2= passo frontale della ruota elicoidale 2
r2
ω2
2θ
b
ω2
r1
ω1
θ
V
c
a
Figura 1.2 – ingranamento vite – ruota
Quando la ruota gira, gira anche la vite. La dentiera equivalente si muove a velocità V:
V =
Pe
zP
ω1 = 1 a ω1
2π
2π
Il moto è equivale a quello di una dentiera a denti trapezi con angolo di pressione θ (se la vite ha
filetto a profilo trapezio, come quasi sempre è) che ingrana con una ruota a denti a profilo di
evolvente di circonferenza.
6
Proprietà dell’autore - tutti i diritti riservati
nessuna riproduzione totale o parziale ne' l'utilizzo di qualsiasi informazione in esso contenuta sono permessi senza autorizzazione scritta
La velocità V è anche la velocità circonferenziale della primitiva della ruota:
ω2 =
V z1Pa
=
ω1
r2 2πr2
essendo, per l’ingranamento, Pa=P2 allora Paz2=2πr2.
Il rapporto di trasmissione vale i =
ω1 z2
= , la ruota può avere molti denti, la vite anche un solo
ω2 z1
principio. L’ordine di grandezza del rapporto di trasmissione i può essere delle centinaia.
Esiste uno strisciamento tra vite e ruota, che influisce in modo importante sul rendimento della
trasmissione. Le velocità delle polari del moto di vite 1 e ruota 2 sono V1=ω1r1, V2=ω2r2. Queste
due velocità sono perpendicolari tra loro, se gli assi di vite e ruota sono perpendicolari.
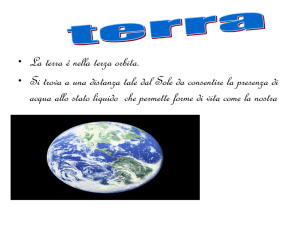
Si osservi la figura 1.2. Con α si è indicato l’angolo tra la traccia del filetto e la direzione
asse della ruota
perpendicolare all’asse della vite.
Vr
ω1 velocità angolare della vite;
ω2 velocità angolare della ruota;
ω2
V2//
V2⊥
V2=ω2r2
asse della vite
ω1
V1// α
V1⊥
V1=ω1r1
V1 velocità periferica del cilindro primitivo
della vite;
V2 velocità periferica del cilindro primitivo
della ruota;
V1// componente parallela al contatto dei
denti della velocità periferica del cilindro
primitivo della vite;
V2// componente parallela al contatto dei
denti della velocità periferica del cilindro
primitivo della ruota;
V1⊥ componente perpendicolare al contatto
dei denti della velocità periferica del
cilindro primitivo della vite;
V1⊥ componente perpendicolare al contatto
dei denti della velocità periferica del
cilindro primitivo della ruota;
Vr velocità relativa dei due profili di denti:
velocità di strisciamento
Figura 1.3 – schema delle velocità al contatto dei denti
Le velocità perpendicolare ai denti, V1⊥ e V2⊥, sono uguali, poiché i denti restano a contatto e,
dunque, né si compenetrano né si separano: sono polari del moto.
7
Proprietà dell’autore - tutti i diritti riservati
nessuna riproduzione totale o parziale ne' l'utilizzo di qualsiasi informazione in esso contenuta sono permessi senza autorizzazione scritta
V1 ⊥= V2 ⊥
V1 sin (α ) = V2 cos(α )
ω1r1 sin (α ) = ω2 r2 cos(α )
ω1 r2 1
z
=
= 2
ω2 r1 tg (α ) z1
la velocità di strisciamento sarà la somma algebrica delle velocità parallele al profilo e sarà parallela
alle V1// e V2//, nella figura 1.2 è indicata con Vr.
Vr = V1 // + V2 //
V1 // = V1 cos(α ) = ω1r1 cos(α )
V2 // = V2 sin (α ) = ω2 r2 sin (α )
la velocità di strisciamento o relativa sarà parallela alla superficie dei denti a contatto:
Vr = V1 cos(α ) + V2 cos(α )
Vr = ω1r1 cos(α ) + ω2 r2 cos(α )
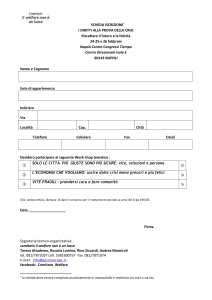
1.2 - Forze scambiate
Per quanto riguarda le forze scambiate ci si può riferire allo schema di figura 1.4.
y
r2
F
ω2
Fy
θ
Fz
ω1
C2
C1
z
ω1
r1
C1
Fz
α
z
F
Fx
x
Figura 1.4 – forze scambiate fra vite e ruota
8
Proprietà dell’autore - tutti i diritti riservati
nessuna riproduzione totale o parziale ne' l'utilizzo di qualsiasi informazione in esso contenuta sono permessi senza autorizzazione scritta
Si ipotizzi, per il momento, attrito nullo. La risultante delle forze scambiate sarà perpendicolare alla
superficie dei denti a contatto. Si definisce un sistema di riferimento (x, y, z), in cui l’asse x è
parallelo all’asse della ruota, l’asse z è parallelo all’asse della vite e y di conseguenza per una terna
destrorsa. Il piano (yz) contiene il piano medio della ruota e l’asse della vite. Il piano (xz), invece
conterà l’asse della vite e sarà parallelo all’asse della ruota.
In assenza di attrito, la forza risultante F scambiata tra i denti, perpendicolare alla superficie dei
denti a contatto, sarà inclinata sia rispetto al piano (x,z), dell’angolo di inclinazione dell’elica α, sia
rispetto al piano (y,z) dell’angolo di pressione θ.
sarà:
Fyz = F cos(α );
Fxz = F cos(θ );
Fx = Fxz sen(α ) = F cos(θ )sen(α );
Fy = Fyz sen(θ ) = F cos(α )sen(θ );
Fz = Fyz cos(θ ) = F cos(α )cos(θ );
Fz = Fxz cos(α ) = F cos(θ ) cos(α ).
Il momento agente dal motore sull’albero della vite 1 e dall’albero dell’utilizzatore sulla ruota 2
saranno rispettivamente:
C1 = r1Fx = r1Fxz sen(α ) = r1F cos(θ )sen(α )
C2 = r2 Fz = r2 Fyz cos(θ ) = r2 F cos(α ) cos(θ )
Infatti, in assenza di attrito il rendimento è unitario:
η=
ω
r 1
C2ω2 r2 1 1
=
= 1 essendo i = 1 = 1
ω2 r2 tg (α )
C1ω1 r1 tg (α ) i
Nel caso, frequente, in cui sia presente attrito tra vite e ruota, la forza F normale al contatto sarà
accompagnata da una forza di attrito tangenziale al contatto FT = fF , dove f è il coefficiente di
attrito.
In questo caso esisterà una componnte FTx = fF cos(α ) che, con braccio r1, darà luogo ad un
momento resistente sulla vite CT1, che si somma al momento motore del caso senza attrito C1:
CT 1 = r1FTx = r1 fF cos(α ) . Anche sulla ruota ci sarà una forza FT = fF , essa darà un contributo
penalizzante, CT2, rispetto al momento C2, che sarà CT 2 = r2 FTz = r2 fFsen(α ) .
Il momento in ingresso sarà
C1* = r1 (Fx + FTx ) = r1 [F cos(θ )sen(α ) + fF cos(α )] = r1 F [cos(θ )sen(α ) + f cos(α )]
9
Proprietà dell’autore - tutti i diritti riservati
nessuna riproduzione totale o parziale ne' l'utilizzo di qualsiasi informazione in esso contenuta sono permessi senza autorizzazione scritta
il momento in uscita sarà:
C2* = r2 (Fz − FTz ) = r2 [F cos(α )cos(θ ) − fFsen(α )] = r2 F [cos(α )cos(θ ) − fsen(α )]
η=
C2*ω2 r2 F [cos(α ) cos(θ ) − fsen(α )] r1
cos(α ) cos(θ ) − fsen(α )
=
tg (α ) =
tg (α )
*
C1 ω1 r1 F [cos(θ )sen(α ) + f cos(α )] r2
cos(θ )sen(α ) + f cos(α )
A scopo di verifica, si noti come questa espressione di η abbia valore unitario per f=0.
1.3 - Reversibilità del moto della trasmissione vite-ruota
Nel caso di moto inverso, in cui il motore sia collegato alla ruota, la vite sarà soggetta ad un
momento che tenderà a farla muovere dovuto a Fx per il suo braccio r1 e sarà presente una azione
antagonista contraria al moto di rotazione della vite dovuta a FTX per il suo braccio r1.
Questo, ricordando l’espressione di Fx e di FTX si traduce nella condizione seguente, per il
coefficiente di aderenza massimo:
cos(θ )sen(α ) = cos(α ) f
Il coefficiente di aderenza massimo f, ed il corrispondente massimo angolo di aderenza φ, per avere
reversibilità del moto risulta:
f = tg (α )cos(θ )
tg (φ ) = tg (α ) cos(θ )
tg (φ )
= cos(θ )
tg (α )
Se si vuole avere l’irreversibilità del moto è necessario avere f a > tg (α ) cos(θ ) ; per assicurare che
non acceda che il moto inverso si inneschi è bene avere f > tg (α )cos(θ ) con f coefficiente di
attrito; questo per evitare che vibrazioni e disturbi inneschino il moto inverso che poi si mantenga.
Per avere un’idea dei valori di massimo coefficiente di aderenza fa, si considerino valori verosimili
per gli angoli di pressione θ e di inclinazione dell’elica α:
per
θ=20°
α=2°
si ha fa massimo 0,03.
10
Proprietà dell’autore - tutti i diritti riservati
nessuna riproduzione totale o parziale ne' l'utilizzo di qualsiasi informazione in esso contenuta sono permessi senza autorizzazione scritta
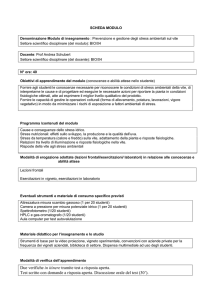
Per ottenere sistemi vite senza fine – ruota elicoidale reversibili si utilizzano configurazioni a
bassissimo attrito come quelli in cui si ha sistemi a ricircolo di sfere del tipo di quelli schematizzati
in figura 1.5. In questi sistemi il coefficiente di attrito (e aderenza) possono essere contenuti
nell’intervallo (0.05-0.001).
3
2
1 – vite
2 – sfere ricircolanti
3 – ruota
1
Figura 1.5 – schema di accoppiamento vite senza fine – ruota elicoidale con ricircolo di sfere.
11
Proprietà dell’autore - tutti i diritti riservati
nessuna riproduzione totale o parziale ne' l'utilizzo di qualsiasi informazione in esso contenuta sono permessi senza autorizzazione scritta
12
Proprietà dell’autore - tutti i diritti riservati
nessuna riproduzione totale o parziale ne' l'utilizzo di qualsiasi informazione in esso contenuta sono permessi senza autorizzazione scritta
Bibliografia
•
C. Ferrari, A. Romiti, Meccanica Applicata alle Macchin", UTET, Torino.
•
G. Jacazio, B. Piombo, Meccanica applicata alle Macchine, Levrotto & Bella, Torino.
•
Belforte G., Meccanica applicata alle Macchine”, Levrotto & Bella, Torino
•
Funaioli F., Maggiore A., Meneghetti U, Lezioni di Meccanica applicata alle Macchine,
Patron Editore, Bologna.
•
C. Ferraresi, T. Raparelli, Meccanica Applicata alle Macchine, clut, Torino
•
G. Jacazio, S. Pastorelli, Meccanica Applicata alle Macchine, Levrotto & Bella – Torino
•
J.L. Merian, L.G. Kraige, Engineering Mechanics, J. Wiley and sons inc.
•
J. Hanna and R.C. Stephens, Mechanics of Machines, Edward Arnold.
13
Proprietà dell’autore - tutti i diritti riservati
nessuna riproduzione totale o parziale ne' l'utilizzo di qualsiasi informazione in esso contenuta sono permessi senza autorizzazione scritta
14
Proprietà dell’autore - tutti i diritti riservati
nessuna riproduzione totale o parziale ne' l'utilizzo di qualsiasi informazione in esso contenuta sono permessi senza autorizzazione scritta