ISTITUTO TECNICO STATALE INDUSTRIALE
“P. HENSEMBERGER”
MONZA & BRIANZA
INDIRIZZO ELETTROTECNICA & AUTOMAZIONE
ESAME DI MATURITA’ a.s. 2008/2009
Classe: 5^B2
Progetto realizzato da:
-Busnelli Angelo
-Civati Riccardo
-Ferri Alessandro
-Fruci Giuseppe
Docente responsabile: Prof. Giuseppe Rizzaro
PDF created with pdfFactory trial version www.pdffactory.com
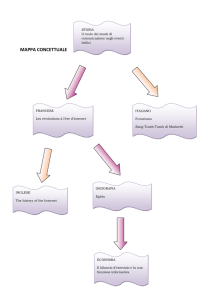
PROGETTO:
1-Descrizione
2-Struttura
3-Dati tecnici
4-Disegno schematico
5-Componentistica utilizzata
6-Fasi di montaggio
7-Schemi circuitali
8-Programmazione Nutchip
9-Stima dei costi
COLLEGAMENTI:
1-STORIA DELLA ROBOTICA
2-INGLESE:
The electric DC motor
-Series motor
-Shunt motor
The capacitor
3-T.D.P.:
Diodi
Diodo raddrizzatore
Diodo LED
Motoriduttore
4-SISTEMI:
Nutchip
Sensori
Sensori di prossimità
Relè
5-LETTERE:
Filippo Tommaso Marinetti
Futurismo
6-STORIA:
La prima guerra mondiale
La seconda guerra mondiale
PDF created with pdfFactory trial version www.pdffactory.com
PROGETTO
1-DESCRIZIONE DEL PROGETTO
Il robot è stato pensato per:
-compiere movimenti autonomi comandati da sensori di prossimità che fanno si che esso possa inseguire
degli ostacoli che trova sul suo percorso.
-essere comandato a distanza attraverso un telecomando.
I movimenti del robot sono dati da 2 motori elettrici in CC che possono girare in entrambi i sensi di
rotazione a seconda del movimento che deve fare.
Gli impulsi iniziali sono dati dai sensori o dai pulsanti; ogni sensore o pulsante comanda una diversa
combinazione di sensi di rotazione (4 sensori / 4 pulsanti = 4 combinazioni diverse di sensi di rotazione),
questo è possibile solo grazie al “cervello” che è presente nel robot che a seconda del valore logico in
ingresso (0/1) darà un impulso in uscita che andrà a comandare i 4 relè che a loro volta azioneranno i
motori.
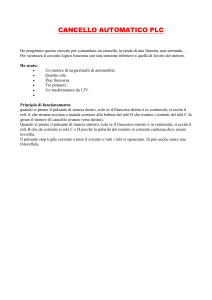
2-STRUTTURA DEL PROGETTO
La struttura del robot è completamente costituita di piastre in plexiglass unite tra di loro che formano in
pratica il suo corpo.
Sulla base del robot ci sono gli alloggiamenti per i 3
sensori e i relativi intagli per il posizionamento degli
ingranaggi di riduzione e delle ruote.
Nella parte laterale destra è stato fissato il
connettore per il PC utilizzato per caricare i programmi
dentro il cervello del robot.
Sulla parte superiore di chiusura sono alloggiati 4
interruttori, 3 led che segnalano l’alimentazione, il
ricevitore infrarosso e il 4° sensore.
All’interno del corpo troveremo tutta l’elettronica utile
per il funzionamento del robot.
PDF created with pdfFactory trial version www.pdffactory.com
3-DATI TECNICI
-Larghezza: 200mm
-Lunghezza: 200mm
-Altezza corpo: 57mm
-Altezza da terra: 10mm
-Altezza totale: 150mm
-Peso: 1580g
-Diametro ruota: 43.2mm
-Larghezza ruota: 28mm
-Circonferenza ruota: 135mm
-Rapporto di trasmissione: 10
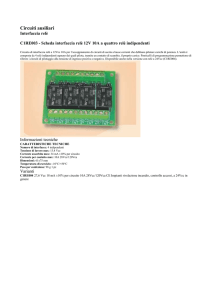
4-DISEGNO SCHEMATICO
Immagine dall’alto del robot eseguita mediante AutoCad
PDF created with pdfFactory trial version www.pdffactory.com
5-COMPONENTISTICA UTILIZZATA
-3 sensori di prossimità SICK WT12-2P430
-1 sensore di prossimità SICK WT27-2F430
-7 relè da 12 volt
-1 Nutchip 01-AK 0510
-4 interruttori per l’accensione dei diversi componenti
-2 motori TAMIYA TORQUE TUNED (3 volt-12000g/min)
-3 diodi led di colori diversi che indicano il circuito alimentato(giallo, verde, rosso)
-6 resistori da 4.7kΩ
-4 resistori da 470Ω
-4 resistori da 1kΩ
-2 resistori da 10kΩ
PDF created with pdfFactory trial version www.pdffactory.com
-2 resistori da 3.3kΩ
-1 resistore da 120Ω
-4 diodi 1N4007DX
-5 transistor BJT BC33725 (giunzione NPN)
-1 transistor BJT C557B (giunzione PNP)
-5 condensatori ceramici da 100ηF
-1 risuonatore ceramico 3 pin da 4 MHz
-1 pacco di batterie AA ricaricabili Energizeer da 1.2 volt x n10
-2 lastre di plexiglass 500mm x 500mm
-3 morsettiere
PDF created with pdfFactory trial version www.pdffactory.com
6-FASI DI MONTAGGIO
1)Per prima cosa abbiamo acquistato le lastre di plexiglass
500mm x 500mm e i vari componenti necessari allo sviluppo.
Dopo aver progettato la forma del robot più idonea ai suoi
movimenti e aver tracciato le varie parti da utilizzare sul
plexiglass stesso, siamo passati alla fase di taglio mediante
il traforo. Una volta finito ciò, abbiamo creato dei fori per
collocare i vari sensori e altri fori sagomati per il fissaggio
degli ingranaggi e delle ruote.
2)Dopo aver fissato i sensori alla struttura siamo passati al
cablaggio del nutchip e del ricevitore con i 2 motori, inizialmente
sperimentati su breadboard con 4 led che simulavano il funzionamento
dei 2 motori e i loro 2 possibili versi di rotazione.
3)Successivamente i led sono stati sostituiti dai
veri motori e dopodiché installati sulla struttura
finale del robot.
4)Dopo aver creato il circuito di movimento tramite telecomando abbiamo creato
anche quello tramite i sensori di prossimità; per far si che i sensori lavorassero
senza che potessero entrare in contrasto tra di loro abbiamo utilizzato i contatti
NC(normalmente chiusi) di 3 relè da 12 volt.
5)Successivamente abbiamo ridotto la tensione di uscita dei sensori da 12V fino a
5V attraverso dei partitori di tensione e poi abbiamo mandato i 4 segnali ai 4
ingressi del Nutchip.
PDF created with pdfFactory trial version www.pdffactory.com
6)Il circuito elettrico è stato testato per le prime volte, per verificarne il corretto funzionamento, sulla
breadboard e ad operazione ultimata è stato realizzato mediante la scheda millefori saldando insieme i
vari componenti elettronici attraverso il saldatore e lo stagno.
7)Successivamente la scheda è stata fissata all’interno del corpo del
robot attraverso una piastrina metallica forata.
8)È stata anche creata una interfaccia porta di
collegamento per caricare i programmi nel
Nutchip collegandolo direttamente alla com 1
del PC.
9)Infine è stato posizionato il ricevitore con i relativi interruttori e led
sopra il robot in modo tale che il ricevitore potesse ricevere i segnali a
infrarosso emessi dal telecomando il più facilmente possibile.
n.b.: il ricevitore montato sul robot riceve solo alcuni codici che possono
essere settati sul telecomando universale (189/191/192/193/194/195).
Per settare il telecomando occorre premere i tasti SET + TV(collocati sul
telecomando) e poi digitare il relativo codice.
PDF created with pdfFactory trial version www.pdffactory.com
7-SCHEMI CIRCUITALI
1-CIRCUITO DI INTERFACCIA COLLEGAMENTO DEL NUTCHIP AL PC
VCC
5V
R3
4.7kΩ
Nutchip
Q2
R2
Connettore
10kΩ
BC557B
R4
4.7kΩ
Q1
R1
10kΩ
BC337
Attraverso il programma Nutstation è possibile creare infiniti programmi a nostra scelta e caricarli
nell’integrato tramite questo piccolo circuito elettronico molto semplice da realizzare.
PDF created with pdfFactory trial version www.pdffactory.com
2-CIRCUITO PER L’AZIONAMENTO DEI MOTORI TRAMITE IL TELECOMANDO
FUNZIONAMENTO DEL CIRCUITO
St 1-premendo il pulsante 1 si eccitano i relè K1 e K3 e utilizzo la coppia relè K1-K2 (positivo - negativo)
per attivare un motore e la coppia K3-K4 (positivo - negativo) per attivare l’altro motore; i motori girano
entrambi nello stesso senso in avanti (il robot va avanti).
St 2-premendo il pulsante 2 si eccitano i relè K2 e K4 e utilizzo la coppia relè K1-K2 però in modo
contrario (negativo – positivo) per attivare un motore e la coppia relè K3-K4 (negativo – positivo) per
attivare l’altro motore; i motori girano entrambi nello stesso senso ma opposto rispetto a quello di prima
(il robot esegue una sorta di retromarcia).
St 3-premendo il pulsante 3 si eccitano i relè K2 e K3 e utilizzo la coppia relè K1-K2 (negativo – positivo)
per attivare un motore e la coppia relè K3-K4 (positivo – negativo) per attivare l’altro motore; i motori
girano in sensi opposti e questo fa si che il robot compia una rotazione sul proprio asse verticale verso
sinistra.
St 4-premendo il pulsante 4 si eccitano i relè K1 e K4 e utilizzo la coppia relè K1-K2 (positivo – negativo)
per attivare un motore e la coppia relè K3-K4 (negativo – positivo) per attivare l’altro motore; i motori
girano in sensi opposti rispetto allo stato 3 e questo fa si che il robot compia una rotazione sul proprio
asse verticale verso destra.
St 5-premendo il pulsante 5 il Nutchip esegue un reset che diseccita i relè in modo tale da arrestare il
robot.
PDF created with pdfFactory trial version www.pdffactory.com
Sono stati posizionati 2 LED:
-1 LED giallo che indica l’alimentazione del Nutchip(5V);
-1 LED verde che indica l’alimentazione dei transistor BJT 33725 a giunzione NPN(12V).
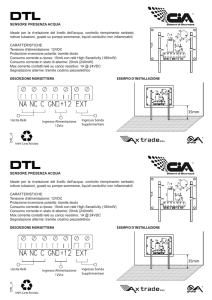
3-CIRCUITO PER L’AZIONAMENTO DEI MOTORI TRAMITE I SENSORI DI PROSSIMITA’
Nutchip
VDD
12V
Interruttore2
Sensoreavanti
Sensoreindietro
Sensoresinistra
Sensoredestra
Indietro1
Sinistra1
Destra1
K
K
K
LED1
R1
Indietro2
K
Sinistra2
K
Destra2
R2
1.0kΩ
R3
1.0kΩ
R4
1.0kΩ
1.0kΩ
K
R5
470Ω
C1
10nF
R6
470Ω
C2
10nF
R7
470Ω
C3
10nF
R8
470Ω
C4
10nF
FUNZIONAMENTO DEL CIRCUITO
Ogni sensore presenta 4 fili (marrone +12 volt, blu -12 volt, nero commutazione NO, bianco commutazione
NC); quando un sensore vede un ostacolo, arriva al filo nero un impulso di +12V che, attraverso il
partitore di tensione creato dalle resistenze, si riduce a 5V e va agli ingressi del Nutchip.
Sono stati messi in parallelo alle esistenze da 470Ω dei condensatori da 10ηF per far diminuire i disturbi
del segnale.
E’ stato posizionato un diodo led rosso per segnalare la presenza di tensione di 12 volt sui sensori.
Inoltre sono stati utilizzati 3 relè da 12 volt per non fare entrare in conflitto più sensori nello stesso
momento secondo il seguente ragionamento:
1-Se va avanti può andare indietro, a destra e a sinistra.
2-Se va indietro non può andare avanti ma può andare a destra e a sinistra.
3-Se va a sinistra non può andare avanti, indietro e a destra.
4-Se va a destra non può andare avanti, indietro e a sinistra
PDF created with pdfFactory trial version www.pdffactory.com
8-PROGRAMMAZIONE NUTCHIP ATTRAVERSO IL PROGRAMMA NUTSTATION
Options: analog comparator
= 0
radio remote
= 0
Key 1 IR/RF code : 4097
Key 2 IR/RF code : 4098
Key 3 IR/RF code : 4099
Key 4 IR/RF code : 4100
Key 5 IR/RF code : 4101
Key 6 IR/RF code : 4102
state out 1..4 inp 1..4 remote next
comments
-------------------------------------------------------------------------------st00 0 0 0 0 0 1 0 0 --- st01 Movimento indietro
- - - - key 2 st01 Movimento indietro
1 0 0 0 --- st02 Movimento avanti
- - - - key 1 st02 Movimento avanti
0 0 1 0 --- st03 Rotazione verso destra
- - - - key 4 st03 Rotazione verso destra
0 0 0 1 --- st04 Rotazione verso sinistra
- - - - key 3 st04 Rotazione verso sinistra
0 0 0 0 --- st00 Reset(stato iniziale)
- - - - key 5 st00 Reset(stato iniziale)
-------------------------------------------------------------------------------st01 0 1 1 0 0 1 0 0 --- st01 Movimento indietro
- - - - key 2 st01 Movimento indietro
1 0 0 0 --- st02 Movimento avanti
- - - - key 1 st02 Movimento avanti
0 0 1 0 --- st03 Rotazione verso destra
- - - - key 4 st03 Rotazione verso destra
0 0 0 1 --- st04 Rotazione verso sinistra
- - - - key 3 st04 Rotazione verso sinistra
0 0 0 0 --- st00 Reset(stato iniziale)
- - - - key 5 st00 Reset(stato iniziale)
-------------------------------------------------------------------------------st02 1 0 0 1 0 1 0 0 --- st01 Movimento indietro
- - - - key 2 st01 Movimento indietro
1 0 0 0 --- st02 Movimento avanti
- - - - key 1 st02 Movimento avanti
0 0 1 0 --- st03 Rotazione verso destra
- - - - key 4 st03 Rotazione verso destra
0 0 0 1 --- st04 Rotazione verso sinistra
- - - - key 3 st04 Rotazione verso sinistra
0 0 0 0 --- st00 Reset(stato iniziale)
- - - - key 5 st00 Reset(stato iniziale)
-------------------------------------------------------------------------------PDF created with pdfFactory trial version www.pdffactory.com
st03 1 0 1 0 0 1 0 0 --- st01 Movimento indietro
- - - - key 2 st01 Movimento indietro
1 0 0 0 --- st02 Movimento avanti
- - - - key 1 st02 Movimento avanti
0 0 1 0 --- st03 Rotazione verso destra
- - - - key 4 st03 Rotazione verso destra
0 0 0 1 --- st04 Rotazione verso sinistra
- - - - key 3 st04 Rotazione verso sinistra
0 0 0 0 --- st00 Reset(stato iniziale)
- - - - key 5 st00 Reset(stato iniziale)
-------------------------------------------------------------------------------st04 0 1 0 1 0 1 0 0 --- st01 Movimento indietro
- - - - key 2 st01 Movimento indietro
1 0 0 0 --- st02 Movimento avanti
- - - - key 1 st02 Movimento avanti
0 0 1 0 --- st03 Rotazione verso destra
- - - - key 4 st03 Rotazione verso destra
0 0 0 1 --- st04 Rotazione verso sinistra
- - - - key 3 st04 Rotazione verso sinistra
0 0 0 0 --- st00 Reset(stato iniziale)
- - - - key 5 st00 Reset(stato iniziale)
-------------------------------------------------------------------------------9-STIMA DEI COSTI
Forniamo in allegato tutti gli scontrini e le ricevute
-2 lastre in plexiglass: 25,00€
-4 batterie ricaricabili AA: 11,90€
-2 motori tamiya: 10,60€
-4 dischi striscianti: 8,00€
-2 connettori a 3 poli: 1,50€
-2 connettori a 2 poli: 1€
-2 relè Finder da 6V: 7,80€
-Basetta in rame: 5,40€
-4 connettori M12 cavo 5 Mt: 34,10€
-Penna per l’acido: 7,20€
-Acido: 4,80€
-4 piastre millefori: 4,00€
-4 sensori di prossimità SICK: 607,50€
COSTO TOTALE: 728,80€
PDF created with pdfFactory trial version www.pdffactory.com
COLLEGAMENTI
1-STORIA DELLA ROBOTICA
L'idea di persone artificiali risale almeno all'antica leggenda di Cadmo, che seppellì dei denti di drago che
si trasformarono in soldati; e al mito di Pigmalione, la cui statua di Galatea prese vita. Nella mitologia
classica, il deforme dio del metallo (Vulcano o Hephaestus) creò dei servi meccanici, che andavano dalle
intelligenti damigelle dorate a più utilitaristici tavoli a tre gambe che potevano spostarsi di loro volontà.
La leggenda ebraica ci parla del Golem, una statua di argilla, animata dalla magia cabalistica. Nell'estremo
Nord canadese e nella Groenlandia occidentale, le leggende Inuit raccontano di Tupilaq (o Tupilak), che
può essere creato da uno stregone per dare la caccia e uccidere un nemico. Usare un Tupilaq per questo
scopo può essere un'arma a doppio taglio, in quanto una vittima abbastanza ferrata in stregoneria può
fermare un Tupilaq e "riprogrammarlo" per cercare e distruggere il suo creatore.
Il primo progetto documentato di un robot umanoide venne fatto da Leonardo da Vinci attorno al 1495.
Degli appunti di da Vinci, riscoperti negli anni cinquanta, contengono disegni dettagliati per un cavaliere
meccanico, che era apparentemente in grado di alzarsi in piedi, agitare le braccia e muovere testa e
mascella. Il progetto era probabilmente basato sulle sue ricerche anatomiche registrate nell' Uomo di
Vitruvio. Non si sa se tentò o meno di costruire il robot.
Il primo robot funzionante conosciuto venne creato nel 1738 da Jacques de Vaucanson, che fabbricò un
androide che suonava il flauto.
Una volta che la tecnologia avanzò al punto che la gente intravedeva delle creature meccaniche come
qualcosa più che dei giocattoli, la risposta letteraria al concetto di robot rifletté le paure che gli esseri
umani avrebbero potuto essere rimpiazzati dalle loro stesse creazioni.
Il termine robot deriva dal termine ceco robota, che significa "lavoro pesante" o "lavoro forzato".
L'introduzione di questo termine si deve allo scrittore ceco Karel Čapek, il quale usò per la prima volta il
termine nel 1920 nel suo dramma teatrale “I robot universali di Rossum”. In realtà non fu il vero
inventore della parola, la quale infatti gli venne suggerita dal fratello Josef, scrittore e pittore cubista,
il quale aveva già affrontato il tema in un suo racconto del 1917, Opilec ("L'ubriacone"), nel quale però
aveva usato il termine automat, "automa". La diffusione del romanzo di Karel, molto popolare sin dalla sua
uscita, servì a dare fama al termine Robot.
Anche se i robot di Čapek erano uomini artificiali organici, la parola robot viene quasi sempre usata per
indicare un uomo meccanico. Il termine androide (dal greco anèr, andròs, "uomo", e che quindi può essere
tradotto "a forma d'uomo") può essere usato in entrambi i casi, mentre un cyborg ("organismo
cibernetico" o "uomo bionico") indica una creatura che combina parti organiche e meccaniche.
Il termine "robotica" venne usato per la prima volta (su carta stampata) nel racconto di Isaac Asimov
intitolato Circolo vizioso (Runaround, 1942), presente nella sua famosa raccolta Io, Robot. In esso, egli
citava le tre regole della robotica, che in seguito divennero le Tre leggi della robotica:
1. Un robot non può recar danno a un essere umano né può permettere che, a causa del proprio
mancato intervento, un essere umano riceva danno.
2. Un robot deve obbedire agli ordini impartiti dagli esseri umani, purché tali ordini non
contravvengano alla Prima Legge.
PDF created with pdfFactory trial version www.pdffactory.com
3. Un robot deve proteggere la propria esistenza, purché questa autodifesa non contrasti con la
Prima e con la Seconda Legge.
Asimov attribuì le tre leggi a John W. Campbell, a seguito di una conversazione fatta il 23 dicembre
1940. Comunque, Campbell sostiene che Asimov aveva già in testa le leggi, che avevano solamente bisogno
di essere formulate esplicitamente.
Anche se Asimov fissa una data di creazione delle leggi, la loro comparsa nelle sue opere avvenne lungo un
periodo di tempo. Asimov scrisse due storie senza menzionare esplicitamente le Tre Leggi ("Robbie" ed
"Essere razionale" detto anche "Secondo ragione"); Asimov assunse, comunque, che i robot avrebbero
avuto una certa salvaguardia inerente. "Bugiardo!", la terza storia di robot di Asimov, menziona per la
prima volta la Prima Legge, ma non le altre.
Alcuni appassionati di robotica sono giunti a credere che le Tre Leggi abbiano una valenza simile alle leggi
della fisica; ovvero, una situazione che viola queste leggi è inerentemente impossibile. Ciò non è corretto,
in quanto le Tre Leggi sono deliberatamente codificate nel cervello positronico dei robot di Asimov.
Asimov infatti distingue la classe dei robot che seguono le Tre Leggi, chiamandoli Asenion robots. I
robot delle storie di Asimov sono tutti Asenion robots, e sono incapaci di violare consciamente le Tre
Leggi, ma non c'è niente che impedisca ai robot di altri racconti, o del mondo reale, di non rispettarle.
Successivamente le tre Leggi vennero estese con una quarta legge, “la Legge Zero”, così chiamata per
mantenere il fatto che una legge con numero più basso soprassedesse a una con numero maggiore. Venne
enunciata da un personaggio di Asimov, Robot Daneel Olivaw, nel romanzo “I Robot e l'Impero”, anche se
venne precedentemente menzionata in “Conflitto evitabile” da Susan Calvin. In “I Robot e l'Impero”,
Giskard fu il primo robot ad agire in base alla Legge Zero, anche se ciò si rivelò distruttivo per il suo
cervello positronico, quando violò la Prima Legge. Daneel, nel corso di molte migliaia di anni, fu in grado di
adattarsi e obbedire completamente alla Legge Zero che recita:
0. Un robot non può recare danno all’umanità, né può permettere che, a causa del proprio mancato
intervento, l’umanità riceva danno.
Le altre 3 Leggi vengono modificate di conseguenza:
1. Un robot non può recare danno a un essere umano né può permettere che, a causa del proprio
mancato intervento, un essere umano riceva danno. Purché questo non contrasti con la Legge Zero.
2. Un robot deve obbedire agli ordini impartiti dagli esseri umani, purché tali ordini non
contravvengano alla Legge Zero e alla prima Legge.
3. Un robot deve proteggere la propria esistenza, purché questa autodifesa non contrasti con la
Legge Zero, la prima Legge e la seconda Legge
La Legge Zero tuttavia risulta essere estremamente complessa rispetto alla programmazione dei cervelli
positronici dei robot, poiché postula che sia possibile, in qualche modo e qualche situazione, violare la
prima Legge della robotica in funzione di un bene più ampio e duraturo dell’intera umanità.
In pratica, un robot potrebbe uccidere un essere umano, in aperta violazione alla prima Legge,
commettendo un danno effettivo e certo, a fronte di un ipotetico e incerto bene per l’umanità.
La contraddizione è al centro del finale del romanzo “I robot e l’impero”, poiché proprio il robot Giskard
sceglierà di permettere che un intero pianeta, la terra, sia condannata ad una lentissima agonia nucleare,
insieme a tutti i suoi abitanti, per spingere l’intera umanità ad abbandonare il grembo del pianeta madre e
colonizzare l’intero unverso. Il suo cervello positronio ne sarà danneggiato irrimediabilmente.
PDF created with pdfFactory trial version www.pdffactory.com
2-INGLESE
THE ELECTRIC DC MOTOR
The classic DC motor has a rotating armature in the form
of an electromagnet whit two poles. A rotary switch
called a commutator reverses the direction of the
electric current twice every cycle so that the poles of
the electromagnet continue to push and pull against the
permanent magnets on the outside of the motor and keep
the armature rotating. In larger motors, the permanent
magnets are replaced by electromagnets known as field
coils.
The commutator consists of a ring split into two or more
segments whit the ends of the armature coils attached to
different segments. The electric current from the
external power source is conducted to the commutator by
small blocks called brushes.
The speed of the motor is proportional to the voltage, and the torque is proportional to the current.
There are different kinds of DC motor.
-In a series motor, the armature and the field magnet are connect in series creating a high torque low
speed motor. As the current flows first through the field magnet and then the armature, it increase the
strenght of the magnets. A series motor can start quickly, even whit a heavy load. However, such a load
will decrease the motor’s speed.
-In a shunt motor, the field and the armature are connected in parallel producing a high speed low
torque motor. One part of the current goes through the field magnet while the other part passes
through the armature. A fine wire is wound around the field magnet many times in order to increase the
magnetism. The strength of the current depends on the resistance of the wire rather than the load on
the motor. A shunt motor will run at an even speed regardless of the load. However, if the load is too
heavy, the motor will have problems starting. DC electric motors are used in a wide variety of batteryoperated devices from toy cars to electric screwdrivers. Unfortunately, their brushes experience
mechanical wear as the rotors turn and eventually they wear out and must be replaced. Furthermore, the
brushes produce mechanical interruptions in the flow of current and these interruptions often create
sparks. Motors whit brushes are unsuitable for some environments because their sparking can ignite
flammable gases.
PDF created with pdfFactory trial version www.pdffactory.com
THE CAPACITOR
Is a device that stores an electric charge. It consist of two metal plates
with an insulating material called a dielectric between them. If a battery is
connected to both plates, an electric charge flows for a short time and
accumulates on each plate. If the battery is disconnected, the capacitor
retains the charge for a time. The ability of a capacitor to store electric
energy is called its capacitance – the larger the plates and the thinner the
dielectric, the higher the capacitance. The basic unit used to measure capacitance is the farad. One
important applications of a capacitor is to block direct current while allowing alternating current to pass.
Because the dielectric is an insulator, a capacitor doesn’t permit DC to flow through it, but its
continuous charging and discharging action permits AC to pass.
Capacitors are widely used in integrated electronic circuits and, in combination with other device, as
tuners for radios and television sets.
3-TDP
DIODO
Il diodo è un componente non lineare provvisto di due terminali denominati rispettivamente anodo (polo
positivo) e catodo (polo negativo).
Il funzionamento di un diodo dipende dal segno della tensione applicata tra anodo e catodo:
-per tensioni positive superiori alla tensione di soglia (caratteristica diretta) il diodo conduce;
-per tensioni negative(caratteristica inversa) il diodo non conduce fino alla tensione di rottura.
Il diodo è in grado di condurre quando viene collegato con la giusta polarità( anodo al positivo, catodo al
negativo)
I diodi più comuni sono:
-diodi raddrizza torri;
-diodi Zener;
-diodi LED.
I diodi LED(light emitting diode - diodo emettitore di luce) sono degli emettitori a semiconduttore
perché il loro funzionamento è basato sulla proprietà, caratteristica di alcuni tipi di semiconduttore, di
emettere radiazioni luminose.
La loro soglia di conduzione è di circa 1,6 V.
La luce emessa da questi diodi può essere di vari colori e i più comuni sono: rosso, super-rosso, giallo,
verde e blu.
Per identificare i terminali del diodo LED faccio riferimento alla loro lunghezza infatti l’anodo è
contraddistinto dal terminale più lungo.
Per l’identificazione di un diodo le case costruttrici utilizzano un codice di tipo alfanumerico secondo le
normative europee o americane.
PDF created with pdfFactory trial version www.pdffactory.com
Il codice europeo prevede l’uso di 5 caratteri di cui almeno i primi 2 letterali:
-il primo carattere serve per identificare il materiale utilizzato per la costruzione del diodo:
A(germanio), B(silicio), C(arseniuro di gallio);
-il secondo carattere serve per identificare la funzione svolta: A(diodo di segnale di piccola potenza),
Y(diodo raddrizzatore), Z(diodo Zener), Q(diodo LED).
Gli ultimi 3 caratteri sono numeri, nel caso di dispositivi per apparecchiature commerciali, oppure una
lettera e 2 numeri, nel caso di dispositivi per apparecchiature professionali.
Il codice americano prevede l’uso di 6 o 7 caratteri alfanumerici di cui i primi 2 sono fissi (1N), i 4
successivi sono numerici e l’ultimo, opzionale, è di tipo letterale.
I tipi di contenitori più utilizzati sono:
-in vetro per applicazioni normali, contrassegnati dalle sigle DO-7 e DO-35;
-in vetro per dispositivi di potenza, contrassegnati dalla sigla DO-41;
-metallici, contrassegnati dalla sigla DO-13.
Un’applicazione in cui il diodo viene impiegato sia come raddrizzatore che come stabilizzatore è quella
per la costruzione degli alimentatori, strumenti destinati all’alimentazione di apparecchiature non
portatili che richiedono per il loro funzionamento delle tensioni continue.
I diodo raddrizzatori prelevano la tensione alternata di rete e la trasformano, utilizzando opportune
tecniche circuitali, in tensione continua.
MOTORIDUTTORE
Il motoriduttore è un tipo di azionamento a velocità non regolabile (inserzione
diretta in cui collego la macchina direttamente alla rete di alimentazione) che
permette di aumentare la coppia in uscita dal motoriduttore e di diminuire la
velocità così che il motore possa sollevare carichi pesanti senza sforzarsi.
Il motoriduttore è costituito da una serie di ingranaggi
che hanno un certo rapporto di trasmissione a seconda
della dimensione di questi ultimi e di come sono
accoppiati tra di loro (accoppiamento meccanico). Se il
numero di ruote dentate è pari, il senso di rotazione
della ruota condotta sarà inverso rispetto al senso di rotazione della ruota
motrice; se il numero è dispari, il senso di rotazione della ruota condotta
sarà uguale rispetto al senso di rotazione della ruota motrice.
Il rapporto di trasmissione (R) è dato dalle relazioni tra la velocità angolare
dell’albero motore e quella della ruota condotta, oppure è dato dalle dimensioni (in termini di diametro o
raggio) delle ruote dentate:
R = Wm/Wc = Rc/Rm
Avendo a disposizione i singoli rapporti di trasmissione, per trovare il rapporto di trasmissione totale
(Rt) basta moltiplicarli tra di loro:
PDF created with pdfFactory trial version www.pdffactory.com
Rt = R1*R2*R3*…..Rn
Se il rapporto di trasmissione totale (Rt) è superiore al valore di 5 si potrebbero generare attriti
imprevisti e allora scomponiamo il singolo accoppiamento meccanico in più accoppiamenti.
La coppia in uscita del motoriduttore sarà:
Cc(condotta) = Cm(motore)*Rt
4-SISTEMI
NUTCHIP
I Nutchip sono integrati universali facili da usare in mille applicazioni. Sono differenti perchè usano le
tavole della verità al posto di un linguaggio di programmazione infatti basta riempire la tabella che
compare a video, per determinare le combinazioni di ingressi/uscite da ottenere. Quindi si trasferisce la
matrice al Nuchip tramite la porta seriale del computer.
Questo integrato permette di costruire progetti in modo molto semplice e veloce:
-un antifurto senza fili;
-un telecomando;
-un controllo per motori passo passo
-un dado elettronico
-un gioco di riflessi;
-un termostato;
-un timer;
-una fotocellula.
SENSORI
I sensori convertono una grandezza fisica in una grandezza elettrica. Si possono trovare in commercio
due famiglie di sensori:
-sensori con semplici dispositivi di tipo on/off oppure di livello 0 e 1; in essi viene utilizzato un elemento a
soglia, che attua una semplice commutazione quando viene superato il valore impostato della grandezza da
controllare;
-sensori con dispositivi capaci di trasformare in modo continuo una specifica grandezza fisica in una
grandezza elettrica, in grado di mantenere una relazione costante tra le due, tale da poter essere
matematicamente calcolata. In essi si utilizza un componente che è in grado di fornire in uscita un valore
continuo.
Nel nostro caso abbiamo trattato i sensori per il controllo di prossimità che hanno la caratteristica di
rilevare senza il necessario contatto fisico degli oggetti ad una determinata distanza.
Un sensore di prossimità essenzialmente è composto di due parti che vengono definite parte operativa,
l’oscillatore, e parte di comando, lo stadio di uscita. Le due parti sono legate da uno squadratore (Trigger
di Schmitt) che ha la funzione di generare un corretto andamento impulsivo del segnale.
Questi sensori si basano su effetti optoelettronici o fotoelettrici e in particolare se ne trovano in
commercio di vari tipi:
-a diffusione;
-a retroriflessione;
PDF created with pdfFactory trial version www.pdffactory.com
-a sbarramento.
Il sensore di prossimità a diffusione si caratterizza dal fatto che emettitore e ricevitore sono alloggiati
nello stesso contenitore insieme all’elettronica di controllo. Il funzionamento si basa sulla luce riflessa da
un qualsiasi oggetto posto in prossimità; il fascio luminoso viene generato dall’emettitore e quando viene
riflesso dall’oggetto ritorna verso l’involucro sensibilizzando il ricevitore.
Questa versione è adatta per rilevamenti di piccola portata ed è particolarmente impiegata per il
rilevamento di oggetti trasparenti o traslucidi. Un’altra caratteristica che distingue questa versione dalle
altre riguarda la portata, che dipende dal potere riflettente e dal colore dell’oggetto da rilevare.
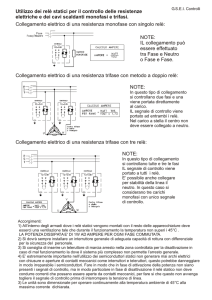
RELE’
Per relè si intende un' apparecchiatura con uno o più contatti elettrici,
che vengono azionati per mezzo di un elettromagnete quando la bobina
dello stesso viene percorsa da una corrente (cioè quando viene "eccitata").
Un relè può azionare un circuito sia se è a riposo, non attraversato da
corrente (in quel caso tale circuito va collegato ai terminali centrale e di
sinistra del relè nella foto), sia se è attivo, attraversato da corrente (in
questo caso il circuito va collegato ai terminali centrale e di destra).
Il nome relè deriva dal francese relais che indicava ognuna delle stazioni
di posta dove i messi postali, durante il loro itinerario, potevano cambiare i
cavalli in modo da svolgere più celermente il loro servizio. Per analogia, ai
primordi della telegrafia si usò il termine relè
nell'indicare i dispositivi grazie ai quali si
trasferiva un messaggio in codice Morse da
una stazione di partenza a una stazione di
arrivo, come se un virtuale messo postale si servisse di tali dispositivi per
arrivare finalmente alla meta.
Per quanto riguarda la logica di funzionamento i relè si distinguono in varie categorie.
-Monostabili
Una sola posizione dei contatti è stabile, mentre l'altra si ha solamente quando è
presente il segnale di eccitazione in ingresso: ad esempio sono relè monostabili
quelli che controllano i potenti motori di grosse macchine operatrici, come i carri
ponte, i quali sono comandati da circuiti a bassa tensione per motivi di sicurezza.
Alcuni modelli impiegano un tempo prefissato per modificare lo stato di
commutazione: questi si definiscono relè temporizzati; più precisamente, esiste
un ritardo stabilito tra l'applicazione del segnale e la commutazione del circuito,
ci sono vari modelli di relè temporizzati: ritardati nell'eccitazione o nella
diseccitazione, a colpo singolo o ciclico. cioè nell'aprire o chiudere il circuito in
ogni situazione.
Un metodo, in uso da tempo per ritardare la chiusura, consiste nel realizzare l'ancora mobile accoppiando
due metalli con caratteristiche di dilatazione differenti in una lamina (perciò detta bimetallica): una
resistenza elettrica avvolta intorno alla lamina costituisce l'elemento che fornisce calore per la lenta
dilatazione asimmetrica della lamina del contatto mobile fino allo scatto in chiusura. Il comando è
PDF created with pdfFactory trial version www.pdffactory.com
costituito dall'applicazione di una tensione alla resistenza. Questa tipologia di relè è definita "a
bimetallo". Un tipo in ampolla in vetro sottovuoto, era impiegato dal costruttore Tektronix negli
oscilloscopi a tubi, per ritardare l'applicazione della tensione anodica, fintanto che i catodi riscaldati dai
filamenti non fossero alla temperatura di lavoro.
-Bistabili
Questa categoria ha due posizioni stabili, che possono essere raggiunte con l'applicazione
di un segnale su uno dei due ingressi corrispondente alla posizione. Questa funzionalità è
anche detta a Flip-flop. Caratteristiche di questi modelli sono l'assenza di consumo
energetico per mantenere la posizione e persistenza dello stato anche dopo lo
spegnimento dell'apparecchiatura che li impiega. Si dice che le apparecchiature
appartenenti a questa categoria siano dotate di memoria, in quanto memorizzano il
segnale che le attiva (eccitando la bobina).
-Passo-Passo
Una serie ciclica di configurazioni dei contatti viene percorsa, avanzando
di un passo ad ogni impulso applicato all'ingresso. Ad esempio, i vecchi
programmatori meccanici delle lavatrici e delle lavastoviglie.
Sono di questo tipo i relè che controllano le luci di casa quando si hanno
più di due punti di controllo: si impiegano nell'impianto dei pulsanti, i quali
agendo sul relè accendono la luce; per spegnerla, basterà premere
nuovamente il pulsante. Sono costituiti da un contatto posizionato su una
camma a sezione quadrata che ad ogni impulso ruota di un ottavo di giro
(passo), il contatto si può trovare sul lato del quadro (contatto chiuso),
oppure sul vertice del quadro (contatto aperto), e così in successione.
-A disco
Il relè a disco è ampiamente utilizzato in Italia per garantire la sicurezza nella
logica di funzionamento degli impianti ferroviari. Il relè viene normalmente
usato come relè di controllo dei segnali permanentemente luminosi, come relè
di controllo della manovra da deviatoio e come relè dei circuiti di binario
alimentati in corrente alternata
Il principio di funzionamento, simile a quello dei contatori di potenza
tradizionali, garantisce che un opportuno disco disposto all'interno del relè si
muova solo se la coppia motrice, proporzionale al prodotto di due correnti
sinusoidali e dello sfasamento tra di esse, superi un valore minimo
preimpostato.
Il relè è previsto per il funzionamento in corrente alternata alle frequenze di 50, 75 e 83.3 Hz. Le due
tensioni sinusoidali vengono denominate “Campagna” e “Locale”. Se lo sfasamento delle due tensioni
sinusoidali è di 90° e la frequenza è di 50 Hz il valore fisso della Locale è di circa 80 Vca mentre quello
variabile della Campagna (sfasato in anticipo rispetto alla locale) è di circa 16/18 Vca. La presenza o meno
della tensione di Campagna determina l’eccitazione o la diseccitazione del relè, la diseccitazione è
comunque garantita (in assenza di tensione) dalla caduta gravitazionale del disco.
PDF created with pdfFactory trial version www.pdffactory.com
-Speciali
Specialmente nel passato, prima dell'avvento della microelettronica erano impiegati relè dal
funzionamento particolare, come quelli per la selezione decadica telefonica e i relè ripetitori per il
segnale del telegrafo.
-Dry-Reed
Il Dry-Reed è un particolare tipo di relè monostabile in cui i contatti sono
contenuti in una ampolla in vetro sigillata ermeticamente, al cui interno è
stato immesso gas inerte. Le due lamine metalliche che costituiscono il
contatto sono realizzate in materiale ferromagnetico, in modo tale che
investite da un campo magnetico esterno si magnetizzino temporaneamente
ed attraggano tra loro. Esiste anche una versione con contatto
normalmente chiuso, realizzato con una lamina in materiale non
ferromagnetico che è in contatto con una lamina in posizione di riposo.
Esiste una versione con una terza lamina, impiegato nella funzione di deviatore.
Vantaggio di questo dispositivo è la bassa usura nel tempo, dovuta alla totale protezione dei contatti da
polvere ed umidità, nonché il ridotto rischio di innesco di archi voltaici. La chiusura del contatto può
avvenire tramite un solenoide che circonda il bulbo, oppure con un elettromagnete, ma anche con un
campo prodotto da un magnete avvicinato al dispositivo. Questo sistema è usato nei contatti magnetici
degli antifurto.
-A mercurio
Una tipologia simile ai dry-reed, la cui lamina mobile, sfruttando il fenomeno di
capillarità, è costantemente bagnata di mercurio, metallo liquido, amagnetico e
conduttivo, hanno il vantaggio di avere una bassa usura dei contatti, ma possono
lavorare in una sola posizione.
5-LETTERE
FILIPPO TOMMASO MARINETTI
Filippo Tommaso Marinetti, nasce ad Alessandria d'Egitto il 22 dicembre
1876, secondogenito dell'avvocato civilista Enrico Marinetti e di Amalia
Grolli.
Alcuni anni dopo, la famiglia torna in Italia e si stabilisce a Milano. Fin da
giovanissimi i fratelli Marinetti manifestano uno smisurato amore per le
lettere, ed un temperamento esuberante.
Nel 1894 Marinetti consegue il baccalaureato a Parigi e si iscrive alla
facoltà di Legge di Pavia già frequentata dal fratello maggiore Leone, che
morirà nel 1897 a soli 22 anni a causa di
complicazioni cardiache.
Trasferitosi all'ateneo di Genova un anno
prima della laurea, che conseguirà nel 1899, collabora all'Anthologie
revue de France et d'Italie, e vince il concorso parigino dei Samedis
PDF created with pdfFactory trial version www.pdffactory.com
populaires con il poemetto La vieux marins.
Nel 1902 viene pubblicato il suo primo libro in versi La conquete des étoiles nel quale già si scorgono i
primi versi sciolti e quelle figure che caratterizzeranno la letteratura futurista.
Vicino all'area politica socialista non vi aderisce mai a pieno per via delle sue idee nazionaliste, e
nonostante la pubblicazione sull'Avanti del suo Re Baldoria, riflessione politico satirica.
Nel 1905 fonda la rivista Poesia, tramite la quale inizia la sua battaglia per l'affermazione del verso
libero, per il quale dapprima incontra un'ostilità diffusa. Il 20 febbraio del 1909 pubblica su Le Figaro' il
manifesto del Futurismo, fondato su undici punti che conglobano tutte le arti, il costume e la politica,
facendo del futurismo l'unica avanguardia poliedrica. Il futurismo dichiara Marinetti: "E' un movimento
anticulturale, antifilosofico, di idee, di intuiti, di istinti, di schiaffi, pugni purificatori e velocizzatori. I
futuristi combattono la prudenza diplomatica, il tradizionalismo, il neutralismo, i musei, il culto del libro."
La rivista Poesia viene soppressa pochi mesi dopo perché considerata sorpassata dallo stesso Marinetti, il
quale conclude la sua pubblicazione facendo apparire sull'ultimo numero il poema futurista Uccidiamo il
chiaro di luna, atto d'accusa all'arcaico sentimentalismo dominante nella poesia italiana, e vero e proprio
inno alla follia creativa.
Da principio, oltre ai frizzanti e provocatori Manifesti, le serate a teatro sono la principale cassa di
risonanza del futurismo, il pubblico composto da aristocratici, borghesi e proletari, viene provocato con
abilità e maestria e spesso le serate futuriste si concludono con l'intervento delle forze dell'ordine.
Nel 1911 allo scoppio del conflitto in Libia, Marinetti, vi si reca come corrispondente per il giornale
parigino L'intransigeant, e sui campi di battaglia trova l'ispirazione che consacrerà definitivamente le
parole in libertà.
Nel 1913, mentre in Italia sempre più artisti aderiscono al futurismo, Marinetti parte per la Russia per
un ciclo di conferenze. Nel 1914 pubblica il libro parolibero Zang Tumb tumb.
Alla vigilia del primo conflitto mondiale Marinetti ed i futuristi si proclamano accesi interventisti, e
partecipano al conflitto, alla fine del quale al leader futurista sono conferite due medaglie al valore
militare.
Alla fine della prima guerra mondiale Marinetti stipula un programma politico futurista, i suoi intenti
rivoluzionari portano alla formazione dei fasci futuristi e alla fondazione del giornale Roma futurista.
Nello stesso anno avviene l'incontro con la poetessa e pittrice Benedetta Cappa che nel 1923 diventerà
sua moglie, e da cui avrà tre figlie.
Nonostante una certa vicinanza all'area comunista e anarchica, Marinetti non è convinto che una
rivoluzione bolscevica come quella russa sia prospettabile per il popolo italiano, e ne propone un'analisi nel
suo libro Al di là del comunismo pubblicato nel 1920.
Il programma politico futurista affascina Mussolini trascinandolo a fare suoi molti degli innumerevoli
punti del manifesto programmatico. Nel 1919 alla riunione al San Sepolcro per la cerimonia di fondazione
dei fasci dei combattenti, Mussolini si avvale della collaborazione dei futuristi e della loro abilità
propagandistica.
Nel 1920 Marinetti si allontana dal fascismo, accusandolo di reazionarietà e passatismo, rimanendo
PDF created with pdfFactory trial version www.pdffactory.com
comunque una personalità rispettata e piena di considerazione da parte di Mussolini. Durante i primi anni
di regime fascista Marinetti intraprende varie tournee all'estero per la divulgazione del futurismo,
durante questi suoi viaggi partorisce l'idea per un nuovo tipo di teatro, "regno del chaos e della
molteplicità."
Il 1922 è l'anno che vede la pubblicazione del, a detta del suo stesso autore, "indefinibile romanzo"
Gl'Indomabili, a cui seguiranno altri romanzi e saggi.
Nel 1929 viene insignito della carica di letterato d'Italia. Seguono la pubblicazione di poemi ed
aeropoemi.
Nel 1935 si reca volontario in Africa orientale; di ritorno nel 1936 comincia una lunga serie di studi e
sperimentazioni sulle parole in libertà.
A luglio del 1942 riparte per il fronte, stavolta nella campagna di Russia. Il suo stato di salute all'arrivo
del rigido autunno si aggrava ulteriormente e viene rimpatriato. Nel 1943 dopo la destituzione di
Mussolini, con la moglie e le figlie, si trasferisce a Venezia.
Verso l'una e venti del 2 dicembre 1944 a Bellagio sul Lago di Como, mentre dimorava in un albergo in
attesa di ricovero in una clinica svizzera, muore a causa di una crisi cardiaca; quella stessa mattina
all'alba aveva composto i suoi ultimi versi.
Di lui ha detto il poeta Ezra Pound: "Marinetti e il futurismo hanno dato un grande impulso a tutta la
letteratura europea. Il movimento al quale Joyce, Eliot, io stesso e altri abbiamo dato origine a Londra
non sarebbe esistito senza il futurismo".
IL PRIMO MANIFESTO
Avevamo vegliato tutta la notte - i miei amici ed io - sotto lampade di moschea dalle cupole di ottone
traforato, stellate come le nostre anime, perché come queste irradiate dal chiuso fulgore di un cuore
elettrico." Con queste parole il 20 febbraio 1909 sulle pagine del quotidiano Le Figaro fece la sua
apparizione il Manifesto di fondazione del Futurismo. Il Futurismo, movimento d'avanguardia di matrice
tutta italiana, scaturito dalla coraggiosa intuizione di Filippo Tommaso Marinetti, si proponeva di
sovvertire l'ordine di tutte le arti e di portare la vita sociale ad una più appropriata sensibilità nei
confronti del suo tempo, caratterizzato dal progresso tecnologico e dalle nuove scoperte scientifiche.
L'intento del futurismo era quello di svecchiare la concezione della vita e dell'arte dominanti in Italia,
avversando il classicismo e tutti i rimpianti che esso comportava negli ambienti artistici, e imponendo
l'amore per le macchine, la tecnologia e la velocità. "I figli della generazione attuale, che vivono fra il
cosmopolitismo, la marea sindacalista e il volo degli aviatori sono come abbozzi dell'uomo moltiplicato che
noi prepariamo." Fin dalla pubblicazione del primo Manifesto il movimento irruppe con una carica
provocatoria verbalmente violenta e polemizzò su tutte le regole sociali ed accademiche.
I primi a rispondere all'appello lanciato da Marinetti furono Umberto Boccioni, Luigi Russolo, Giacomo
Balla, e Gino Severini, che nel 1910 scrissero il "Manifesto tecnico della pittura futurista".
Furono proprio i manifesti programmatici a conferire al futurismo una spina dorsale, ed a chiarirne gli
innovativi concetti con i quali si proposero di ricostruire una nuova sensibilità verso la vita. Questi scritti,
espressamente tecnici, talvolta ironici e provocatori, riuscirono ad insinuarsi nell'immaginario di molti
altri artisti, che in un primo momento furono ostili a cambiamenti così radicali, ed a creare un contatto
fra il popolo e l'arte. L'avanguardia futurista fu la più poliedrica e prodiga nella ricerca e nella
PDF created with pdfFactory trial version www.pdffactory.com
produzione di tutte le arti, (senza trascurarne nessuna, nel '17 non mancarono neppure le sperimentazioni
cinematografiche) dell'architettura, della fotografia, del costume, della politica, e della culinaria.
Marinetti si mostrò estremamente creativo nello studiare espedienti che concentrassero l'attenzione del
pubblico verso le attività del gruppo, dimostrandosi un originale precursore della pubblicità creativa, e
carpendo l'interesse delle masse anche all'estero, dove promosse mostre e conferenze.
Un modo irruento ed un frasario violento caratterizzarono il modus operandi dei futuristi, il quale non
mancò di creare sbigottimento, ma dopo un breve periodo di contestazioni e scetticismo molti,
soprattutto fra i giovani artisti, aderirono al movimento che, per definizione del suo stesso fondatore,
era: "... un movimento anticulturale, antifilosofico, di idee, di intuiti, di istinti, di schiaffi, pugni
purificatori e velocizzatori. I futuristi combattono la prudenza diplomatica, il tradizionalismo, il
neutralismo, i musei, il culto del libro." Nonostante un ostentato maschilismo, in Italia, il futurismo pose
le basi per il diritto al voto delle donne, e la loro partecipazione alla vita politica, con l'intento di
svecchiare l'arcaico parlamentarismo, e demolire le idee preconcette della "donna madre" e della "donna
fatale". Due delle donne che più delle altre lasciarono segni indelebili all'interno dell' avanguardia furono
Valentine De Saint Point, autrice del Manifesto della donna futurista, e del Manifesto della Lussuria, e la
pittrice e poetessa Benedetta Cappa, che sposerà Marinetti nel 1923. Oltre ai manifesti, le serate
teatrali riuscirono ad amplificare questa rivoluzione culturale, culminando in spettacoli volutamente
caotici e provocatori in cui si dava mostra contemporaneamente di letture di poesie futuriste, musica
rumorista, e pittura dinamica. Spesso queste serate davano origine a tumulti ideologici tra i difensori
dell'accademismo classico ed i futuristi e i suoi simpatizzanti, culminando con l'intervento delle forze
dell'ordine impegnate a sedare gli animi più accesi di entrambe le parti procedendo con arresti e
denunce. Nella letteratura il futurismo si impose con le "Parole in libertà", invenzione del suo fondatore
che, molto attento nel ricercare nuove forme di comunicazione, per contestare la lingua e le poetiche
tradizionali, creò un linguaggio sintetico che sostituiva alla normale sintassi e punteggiatura un linguaggio
molto asciutto, incrementato dalle onomatopee, dagli acrostici e dai simboli, eliminando il più possibile
articoli e congiunzioni. Dai poemi marinettiani Zang Tumb tumb, e Battaglia + peso + odore , e dalle tavole
Parolibere di Govoni se ne evince l'esempio concreto. Nella pittura e nella scultura gli artisti futuristi
concepivano le loro opere tenendo conto della plasticità e del movimento in tutto il loro dinamismo, e con
un particolarmente attento uso del colore. Per quanto riguarda la musica, i musicisti futuristi sfruttarono
i suoni ed i rumori delle metropoli e dei cantieri per esprimere la forza costruttiva industriale inventando
alcuni strumenti denominati "Intonarumori". Grazie a dei cicli di conferenze in Russia negli anni '10, e all'
organizzazione di mostre in Francia e Cecoslovacchia, in poco tempo la fama del futurismo fece il giro del
mondo, arrivando a portare il suo stile innovatore oltre che in tutta Europa, anche in America e Giappone,
fomentando la creazione di alcune branche dell'avanguardia, come l' egofuturismo, cubofuturismo, il
raggiofuturismo, ed il futurismo russo. Allo scoppio del primo conflitto mondiale i futuristi si
dichiararono accesi interventisti ed all'inizio delle ostilità partirono volontari per il fronte. A causa della
guerra alcuni di loro perirono chiudendo quello che gli storici delle avanguardie definiscono: il periodo del
"primo futurismo" periodo più creativo del movimento.
A guerra finita il movimento diede vita alle associazioni dei Fasci Futuristi ed i suoi Manifesti politici
influenzarono Mussolini così tanto che egli fece suoi molti dei punti programmatici, ed alla riunione dei
Fasci dei combattenti il futuro duce si avvalse della collaborazione propagandistica dei futuristi, i quali a
loro volta sperarono di veder attuate le loro rivendicazioni. Il futurismo politico era caratterizzato da
atteggiamenti antimonarchici e anticlericali, e dall'idea di: "cancellare il fastidioso ricordo della
PDF created with pdfFactory trial version www.pdffactory.com
grandezza romana, per sostituirla con una grandezza italiana cento volte maggiore". Proprio questi punti
si rivelarono i maggiori motivi d'attrito tra i futuristi ed il futuro regime, che rinsaldò i rapporti con
monarchia e clero, e ripropose al popolo un' estetica fatta di miti classici greci ed in particolar modo
della Roma Imperiale. Già nel 1920 Marinetti e molti futuristi presero le distanze dal fascismo
accusandolo di passatismo. Nonostante questa presa di posizione Mussolini tenne sempre un
atteggiamento riguardoso nei confronti del suo leader e del movimento, promuovendolo ad arte di stato,e
conferendo a Marinetti, nel 1929, la carica di Accademico d'Italia. Nel corso di tutti gli anni 20 e 30 il
futurismo continuò la sua ricerca stilistica e comunicativa nell'arte, prodigandosi maggiormente nella
danza, nel teatro sintetico, e nella culinaria. Sempre in quel decennio alcuni degli artisti del movimento
tornarono a dedicarsi al classicismo, mentre altri diedero vita a nuovi stili e sperimentazioni.
Con lo sviluppo dell'aviazione si diede vita all'aeropoesia e all' aeropittura, gli autori stimolati dai voli
aeronautici riportavano su carta e su tela le sensazioni e le prospettive del volo aeronautico.
Se si volesse cercare una data conclusiva dell'avventura futurista, essa potrebbe rinvenirsi nel 2
dicembre del 1944, all' unisono con la data di morte del suo fondatore. Nonostante un lunghissimo
periodo di ostracismo messo in atto da critici poco accorti, che hanno ingiustamente legato il movimento
d'avanguardia al fascismo in ogni sua componente, e che hanno erroneamente analizzato le dichiarazioni
più provocatorie del futurismo in tema di maschilismo e militarismo, l'influenza futurista non ha mai
cessato di esistere nell'arte e nella comunicazione mondiale. Non è azzardato affermare che la Pop Art,
la musica elettronica, la pubblicità, la grafica, il linguaggio e la letteratura odierne debbano molto
all'insegnamento futurista.
6-STORIA
LA PRIMA GUERRA MONDIALE
La prima guerra mondiale fu l'epilogo di un processo storico che andava lentamente maturando già dalla
fine dell'800.
L'atto d'inizio avvenne il 28 giugno del 1914. Un gruppo di studenti serbi assassinarono l’arciduca
ereditario d’Austria Francesco Ferdinando e la consorte a Sarajevo. Ne seguì un periodo di conflitto
diplomatico e, infine, un ultimatum austriaco alla Serbia che richiedeva la presenza dei propri funzionari
nella commissione d'inchiesta sull'attentato. Dopo il rifiuto dell'ultimatum da parte serba, il governo
austriaco dichiarò formalmente la guerra.
Nell'arco di pochi giorni e poche settimane, tutte le maggiori potenze europee, entrarono in guerra:
• La Germania dichiarò guerra alla Russia, che aveva mobilitato l'esercito in appoggio ai serbi e alla
Francia, e invase, nei giorni successivi, il Lussemburgo e il Belgio.
• L'Inghilterra dichiara guerra alla Germania per la violazione tedesca della neutralità del Belgio.
• L'Italia proclamò la neutralità, anche se durerà solo fino al 1915, quando entrerà in guerra a
fianco dell'Intesa.
• Nei mesi fra agosto e novembre entrarono nella guerra anche il Giappone (a fianco dell'Intesa
anglo-franco-russa) e la Turchia (a fianco degli Imperi Centrali)
I due opposti schieramenti erano quello degli Imperi Centrali tedesco e austriaco, con i loro alleati
minori, e la Triplice Intesa fra Inghilterra Francia e Russia cui si uniranno nel corso della guerra altri
stati.
La Guerra diventerà mondiale dopo l'entrata in guerra del Giappone nel 1914 e nel 1917 degli Stati Uniti a
fianco dell'intesa.
I motivi globali che fecero scoppiare la guerra, erano molteplici e diversi da alleanza ad alleanza: l'Intesa
sosteneva che la guerra era esplosa per arrestare l'aggressività tedesca, per lo scontro fra la
PDF created with pdfFactory trial version www.pdffactory.com
democrazia liberale e l'autoritarismo, come guerra per l'indipendenza dei popoli, e per l'affermazione del
principio di nazionalità, invece, gli Imperi Centrali, in particolar modo la Germania, sosteneva che la
guerra fosse la risposta ai suoi tentativi, bloccati, d'espansione e alle iniziative coloniali.
In realtà le cause furono:
1. Il contrasto tra l'imperialismo germanico e l'imperialismo dell'Inghilterra e della Francia;
2. Le preoccupazioni Anglo Francesi per la crescita industriale e militare della Germania;
3. La volontà della Francia di Recuperare l'Alsazia e la Lorena strappatele dalla Germania nella guerra
del 1870-71;
4. La rivalità austro-russa nella penisola balcanica;
5. Le inquietudini dei popoli balcanici e le aspirazioni della Bosnia e dell'Erzegovina a sottrarsi alla
dominazione austriaca e ad unirsi al regno di Serbia;
6. Le mire dell'Italia ad annettere le regioni del Trentino e Venezia Giulia e ad espandersi in Dalmazia e
in Albania;
7. Il particolare clima culturale dell'epoca, incline all'esaltazione della guerra e dell'imperialismo.
L'opposizione alla guerra avviene unicamente da parte dei cattolici e dei socialisti, mentre gli altri partiti
finirono per accettare il conflitto come "guerra patriottica".
La guerra nelle aspettative di tutti, doveva essere breve e quindi non troppo rovinosa.
La Germania, nel 1914, tentò una "guerra lampo" contro la Francia, ma fallì. Gli imperi centrali ottennero,
invece grandi successi sul fronte orientale, contro la Russia, ma nessuna battaglia fu realmente risolutiva.
Divenne quindi, da guerra di movimento a guerra di trincea, cioè di posizione.
Nel Maggio del 1915 l'Italia entra in guerra a fianco dell'Intesa aprendo un nuovo fronte anti-austriaco,
in Settembre, invece, la Bulgaria si schierò con la Triplice Alleanza degli Imperi Centrali. Ma nemmeno
questi mutamenti cambiarono il corso degli eventi bellici che continuarono ad essere di trincea.
Il 1916 fu l'anno delle grandi offensive militari e delle stragi inutili. Inglesi e Francesi tentarono la
grande offensiva anti-tedesca della Somme. Vi fu anche l'unico scontro navale importante del conflitto:
la battaglia dello Jutland tra flotte inglese e tedesca. Vista l'inutilità dell'azione navale e la superiorità
inglese, la Germania passò alla guerra sottomarina tentando di bloccare i rifornimenti all'Inghilterra
provenienti dagli Stati Uniti che l'anno successivo entrarono in guerra.
Nel 1917 la guerra segnò una svolta fondamentale: in Russia ci fu una rivoluzione (prima quella di
Febbraio, poi quella d'ottobre guidata dai comunisti), che portò alla caduta del regime zarista e l'uscita
del paese dal conflitto, inoltre ci fu l'ingresso in guerra degli Stati Uniti d'America a fianco dell'Intesa.
Gli USA, nei precedenti anni del conflitto, avevano fatto giungere all'Inghilterra aiuti economici.
Uscendo la Russia dal conflitto, Germania e Austria hanno un fonte in meno da difendere. Quindi
spostarono le truppe dal fronte orientale a quello occidentale.
Sul fronte Italo Austriaco, nell'ottobre, vi fu la disastrosa ritirata italiana di Caporetto che fece
temere una possibile invasione austriaca nell'Italia settentrionale.
Ovunque, nei paesi belligeranti, vi furono proteste popolari contro la guerra, diserzioni massicce di
soldati e vere e proprie insurrezioni contro i governi. In particolar modo la situazione divenne difficile
per gli Imperi Centrali e ,proprio le crisi interne, più che la sconfitta militare, decreteranno il crollo e la
perdita della guerra.
Nei primi mesi del 1918 le sorti della guerra erano ancora incerte non favorevoli agli Imperi Centrali.
In Marzo, i comunisti russi, firmavano la pace di Brest Litovsk, con la quale concedevano alla Germania
Estonia, Lituania, Polonia, Finlandia, Georgia e Ucraina.
In Aprile la Romania, alleata dell'Intesa, fu costretta a ritirarsi dal conflitto.
Fra il Marzo e il luglio, l'esercito tedesco tentò nuove offensive sui fronti occidentali senza riuscire a
sfondare le linee nemiche.
In Italia, l'esercito di Vittorio Emanuele III si apprestava ad una decisiva offensiva anti-austriaca.
La Turchia e la Bulgaria, dissanguate dalla guerra erano vicine al crollo.
In Oriente, dove si combatteva una guerra parallela fra l'esercito turco e gli Inglesi, gli alleati Tedeschi
continuavano a subire sconfitte.
Gli Stati Uniti, nel frattempo avevano mandato in Europa un milione di soldati.
PDF created with pdfFactory trial version www.pdffactory.com
Fra l'Estate e l'Autunno, i "fronti interni" della Germania-Austria, crollano e furono proprio gli stessi
militari a chiedere al cancelliere di trattare la pace all'imperatore austriaco, Guglielmo II, di abdicare.
Nel Novembre in Germania, il Kaiser abbandona il potere e viene proclamata la repubblica.
Nasceva così la nuova Germania chiamata Repubblica di Weimar.
L'Impero asburgico si disgrega. L'imperatore Carlo abdica e, seguendo l'esempio della Germania, viene
proclamata la repubblica.
Anche su tutti gli altri fronti di guerra in Europa e nel mondo, cessavano le ostilità; la guerra era finita.
LA SECONDA GUERRA MONDIALE
Mentre sul fronte occidentale i Francesi si erano arrestati sulla linea fortificata Maginot e i Tedeschi su
quella Sigfrido, l’esercito hitleriano occupò con un’azione fulminea (guerra-lampo) la Polonia, invasa
contemporaneamente anche dalle truppe sovietiche, che in seguito posero sotto il loro controllo anche le
repubbliche baltiche e la Finlandia. Dopo essersi impadroniti di Danimarca, Norvegia, Olanda, Belgio
Lussemburgo, i Tedeschi invasero la Francia e occuparono le coste della Manica. Mussolini, dopo l’iniziale
posizione di “non-belligeranza”, decisel’ingrasso dell’Italia nel conflitto (10 giugno 1940), convinto di
poter approfittare della sicura vittoria. La sua fiducia sembrò confortata dall’occupazione da parte
tedesca dell’intera Francia, dove fu creato un governo fantoccio, retto dal maresciallo Pétain (governo
collaborazionista di Vichy). Hitler decise quindi di dare il via all’invasione dell’Inghilterra, preparandola
con un bombardamento a tappeto messo in atto dall’aviazione tedesca (Luftwaffe), che distrusse alcune
città e basi militari dell’isola. La forza aerea inglese (Raf) riuscì però a rintuzzare l’offensiva, grazie
anche all’uso del radar (battaglia d’Inghilterra). Dopo una serie di insuccessi militari italiani, le sorti del
conflitto si rovesciarono anche in Africa, dove gli Inglesi penetrarono in Libia e occuparono la Somalia,
Eritrea ed Etiopia (gennaio 1941). Ma a far sperare le democrazie europee fu soprattutto la cosiddetta
“legge affitti e prestiti”, decisa da Roosvelt per inviare aiuti americani in favore degli stati in lotta
contro il nazismo.
Le forze dell’Asse ripresero l’iniziativa nella primavera del 1941, quando gli Italiani, con l’appoggio del
corpo corazzato del generale Rommel, rioccuparono la Pirenaica e l’esercito tedesco occupò Iugoslavia e
Grecia. Hitler decise inoltre l’invasione dell’Unione Sovietica, dando inizio all’operazione Barbarossa
(giugno 1941). Con una rapida avanzata l’esercito invasore giunse nei pressi di Mosca e di Leningrado, ma
fu bloccato dal sopraggiungere dell’inverno, che dette il tempo all’Armata Rossa di riorganizzarsi. Mentre
quasi tutta Europa si trovava sotto il giogo nazista e nei Paesi si creavano governi filonazisti, i Tedeschi
preparavano lo sterminio di sei milioni di Ebrei, deportati in massa nei campi di concentramento di
Auschwitz, Buchenwald, Dachau, Mauthausen, Ravensbruk. Il 1941 terminò con l’attacco alla base
statunitense di Pearl Harbor sferrato dal Giappone (7 dicembre), che provocò l’ingresso degli Stati Uniti
nel conflitto.
Nella primavera del 1942 le potenze dell’Asse ripresero l’iniziativa: i Giapponesi occuparono importanti
territori in Estremo Oriente, mentre in Africa settentrionale una controffensiva italo-tedesca riuscì a
riprendere il controllo della Pirenaica, riconquistata però dagli Inglesi nel dicembre 1941, e a giungere
fino ad El-Alamein (Egitto). Nell’estate del 1942 le truppe naziste ripresero l’avanzata in Unione
Sovietica, dove occuparono la Crimea e giunsero a Stalingrado. Questi successi dell’Asse ebbero però un
aspetto negativo, in quanto allargarono eccessivamente il fronte, rendendo per i tedeschi difficili i
contatti e i rifornimenti. A minare l’efficienza delle forze hitleriane contribuirono anche la resistenza
antinazista e i consistenti aiuti degli Americani (viveri e materiale bellico). Si preparava così un
rovesciamento delle sorti del conflitto, con la controffensiva Americana del Pacifico (battaglie navali del
Mar dei Coralli e delle isole Midway) e quella britannica in Africa, che portò allo sfondamento del fronte
italo-tedesco, mentre nel novembre del 1942 gli Statunitensi sbarcarono in Marocco e in Algeria sotto la
direzione del generale Eisenhower. Nel frattempo a Stalingrado la popolazione resistette eroicamente
all’assedio per 180 giorni, permettendo all’esercito sovietico di sferrare l’attacco finale, che portò alla
PDF created with pdfFactory trial version www.pdffactory.com
resa della sesta armata tedesca (2 febbraio 1943). Nella disastrosa ritirata che seguì le truppe italotedesche furono annientate dal freddo e dalla fame. Fu quello il segnale del tracollo delle ambizioni
imperiali di Hitler. Ciò non impedì che il nazismo mietesse ancora un numero esorbitante di vittime, come
avvenne nel ghetto di Varsavia, dove furono uccisi 40.000 Ebrei, e in molte città dell’Europa occupata.
Intanto in Italia, dove ormai il regime fascista era invaso ai più, fu aperto un secondo fronte occidentale
con lo sbarco alleato an Sicilia (10 luglio 1943).
Di fronte alla tragica situazione determinata dallo sbarco anglo-americano, il Gran consiglio del fascismo
decretò la fine del regime fascista (24-25 luglio 1943), favorendo da parte del re l’arresto di Mussolini.
Fu formato un nuovo governo guidato da Badoglio, accordatosi segretamente con gli alleati per trattare
una pace separata. A quel punto l’Italia diventava una nemica per Hitler, che inviò dieci divisioni nella
penisola. Così, quando l’8 settembre fu reso noto l’armistizio firmato con gli Anglo-Americani, l’esercito
italiano, abbandonato dal re e da Badoglio, si trovò in balia dei Tedeschi, i quali occuparono in poco tempo
l’intera penisola (piano Alarico). Il 12 settembre Mussolini, liberato da paracadutisti tedeschi, fu posto a
capo della Repubblica Sociale Italiana, con sede a Salò. L’Italia, dotata a quel punto di due governi (quello
dei “repubblichini” a Salò e quello di Badoglio a Brindisi), diventò un campo di battaglia per lo scontro fra
alleati e Tedeschi. La lotta contro i nazisti fu condotta con vigore anche dalla Resistenza, costituita
dall’azione armata e clandestina delle brigate partigiane, composte da liberali, monarchici, socialisti,
comunisti, cattolici e seguaci del Partito d’Azione. La Resistenza, però, non fu solo una lotta di
liberazione: per molti (comunisti, socialisti, Giustizia e Libertà) fu anche una battaglia politica, tesa ad
annientare le forze reazionarie e a democratizzare la società. Le diversità ideologiche non impedirono
che i gruppi combattenti si dotassero di una direzione politica unitaria, il Comitato di liberazione
nazionale (Cln), presieduto da Ivanoe Bonomi, e di una direzione militare unitaria, il Corpo volontari della
libertà (Cvl). Il 13 ottobre l’Italia dichiarò guerra alla Germania, schierandosi a fianco degli alleati in
qualità di “cobelligerante”. Intanto il 27 settembre le truppe anglo-americane giungevano a Napoli, già
liberata dalla popolazione (“quattro giornate”), ma si arrestavano sulla linea Gustav, in quanto il comando
alleato aveva progettato di concentrar le forze sul fronte francese. Così, dopo lo sbarco alleato ad
Anzio (gennaio 1944), l’interesse si concentrò sulla politica, in vista dell’assetto da dare al Paese dopo la
guerra. Prevalse la linea moderata di liberali e democratici cristiani, appoggiata dagli alleati, mentre
quella più intransigente di socialisti, comunisti e Partito d’Azione, favorevoli all’abolizione della
monarchia, fu attenuata dopo la svolta di Salerno operata da Togliatti, leader del Pci (marzo 1944). Ciò
rese possibile la formazione di un governo di unità nazionale guidato da Badoglio. Continuavano intanto le
stragi naziste (Fosse Ardeatine) e la guerra partigiana.
Dopo aver ripreso l’avanzata nella primavera del 1944, gli alleati liberarono Roma, dove fu creato un nuovo
governo presieduto da Bonomi, e giunsero a Firenze (11 agosto), già liberata dai partigiani; si arrestarono
però sulla “linea gotica”, mentre l’Italia restava divisa in due tronconi e al Nord continuavano
bombardamenti ed eccidi (Marzabotto). Nel frattempo gli Anglo-Americani sbarcavano in Normandia (6
giugno 1944) liberavano la Francia e marciavano alla volta della Germania, verso cui convergevano anche i
Sovietici. Nonostante i tracolli militari, Hitler continuava a credere nella vittoria. Ma dopo l’incontro di
alleati e Sovietici sull’Elba, l’occupazione sovietica di Berlino e la liberazione d’Italia (25 aprila 1945), la
resa della Germania fu inevitabile. Mussolini fu fucilato (28 aprile) e Hitler si suicidò (30 aprile): il crollo
del regime nazista e fascista sancì la fine della guerra in Occidente, ma non nel pacifico, dove i
Giapponesi non volevano arrendersi. Per stroncare la resistenza, il nuovo presidente americano Truman
fece sganciare la bomba atomica sulle città di Hiroshima e Nagasaki (6-9 agosto 1945). Il Giappone fu
così costretto a firmare la resa.
PDF created with pdfFactory trial version www.pdffactory.com