di")
Calcolo vettoriale
1. Nel piano Oxy sono dati i vettori
• (P − O) di modulo 4 e formante un angolo di
√
• (Q − O) = 3i − 3j,
√
• (P − R) = 2 3i.
π
6
con la direzione positiva dell’asse x,
Determinare |Q − O|, vers(Q − O), |(P − O) + (Q − O)|, (P − Q), (R − O), |R − Q| e l’angolo formato
da (R − Q) con l’asse x.
2. Nel piano Oxy sono dati i vettori
• (P − O) di modulo 6 e formante un angolo di
• (Q − O) di modulo 2 e formante un angolo di
2π
3 con la direzione positiva dell’asse x,
π
4 con la direzione positiva dell’asse x,
Determinare |(P − O) + 2(Q − O)| e |P − Q|.
3. In un riferimento cartesiano Oxyz, sono dati i punti P, Q, R di coordinate P (1, 2, 0), Q(−1, 1, 1) e
R(0, 0, 3). Determinare le componenti e i moduli dei vettori (P − Q), (Q − P ), (P − R) e (Q − R).
4. Sono dati nel riferimento cartesiano Oxyz, i vettori (P − O) = 2i + 3j − k, (Q − O) = i − j, (R − O) =
4i − 2j + k. Scrivere le componenti del vettore 2(P − O) + (Q − O) − 3(R − Q).
√
√
5. Nel riferimento cartesiano Oxy sono dati i vettori (P − O) = 2i + 2 3j, (Q − O) = − 3j. Calcolare
• |(P − O)|,
• |(Q − O)|,
• (P − O) · (Q − O),
• |(P − O) × (Q − O)|,
6. Nel riferimento
√ cartesiano Oxy sono dati i vettori (P − O) = 2i − 3j, (Q − O) =
(R − O) = −2 2i + j. Calcolare
√
2i −
√
3j e
• (P − O) · (Q − O),
• (P − O) × (Q − O),
• (Q − O) × (P − O),
• (P − O) · (Q − O) × (R − O),
• [(P − O) × (Q − O)] × (R − O),
• (P − O) × [(Q − O) × (R − O)].
7. Nel riferimento cartesiano
Oxyz sono dati i vettori (P − O) = 2i + j, (Q − O) =
√
(R − O) = −2i − j + 2k. Calcolare
• (P − O) · (Q − O),
• (Q − O) · (R − O),
• (Q − O) × (R − O),
• (P − O) × (Q − O) · (R − O),
• (R − O) · (Q − O) × (P − O),
1
√
√
2i + 2 2j − k e
• [(P − O) × (Q − O)] × (R − O),
• (P − O) × [(Q − O) × (R − O)].
8. Dati i vettori (P − O) = −i + j e (Q − O) = 3i + 3j, determinare, se esiste, un vettore v tale che
v × (P − O) = (Q − O).
9. Dati i vettori (P − O) = 2i + j − k e (Q − O) = 3i + 3j + k, determinare, se esiste, un vettore v tale
che (P − O) × v = (Q − O).
10. Dati i vettori (P − O) = 2i + j − k e (Q − O) = 3i + 3j + 9k, determinare, se esiste, un vettore v tale
che (P − O) × v = (Q − O).
11. Nel riferimento cartesiano Oxyz sono dati i vettori applicati (A1 , v1 ) e (A2 , v2 ) con A1 (2, 2, 3), v1 =
−2i − 2j + 3k, A2 (0, 0, 1), v2 = 2j − k, determinare il risultante, il momento risultante rispetto al polo
O, il momento risultante rispetto al polo O0 (1, 0, 1), l’invariante scalare, il momento assiale rispetto
all’asse z.
√
√
√
12. Determinare il momento e il braccio della coppia (A1 , v) e (A2 , −v) con A1 (1, 55 , − 5), A2 (−1, 0, 2 5 5 ),
v = 3j + 4k.
13. Scrivere l’equazione dell’asse centrale del sistema di vettori applicati
• A1 (0, 2, 0), v1 = 5j
• A2 (0, 9, 0), v2 = −3j + 4k
• A3 (2, 0, 0), v3 = −2i
14. Dato il sistema di vettori applicati
• A1 (1, 0, 0), v1 = i − 2j + k
• A2 (0, 2, 0), v2 = j − 3k
• A3 (0, 0, 3), v3 = 2i + 3j − k
determinare il risultante, il momento risultante rispetto al polo O, il momento risultante rispetto al
polo O0 (1, 2, 3), l’invariante scalare, il momento assiale rispetto all’asse z, l’equazione dell’asse centrale.
15. Un sistema di vettori applicati ha risultante R = 3i − j + 2k e momento risultante rispetto al polo O,
MO = −4i − 2j + k. Calcolare il momento rispetto ad un punto dell’asse centrale.
16. Trovare il centro dei vettori applicati
• A1 (0, 1, 0), v1 = u
• A2 (1, −1, 0), v2 = 2u
• A3 (0, −1, 2), v3 = −2u
• A4 (−1, 0, 1), v4 = 3u
17. Trovare il centro dei vettori applicati
• A1 (1, 1, 0), v1 = 6i + 4j − 10k
• A2 (0, 1, 1), v2 = −3i − 2j + 5k
• A3 (0, 0, 1), v3 = 12i + 8j − 20k
2
18. Due sistemi di vettori applicati Σ e Σ0 hanno risultante R = R0 = 2i − j e momento risultante
MO = −i − 2j − k e M0Q = 4k rispetto ai punti O(0, 0, 0) e Q(1, 2, −1). Verificare che Σ e Σ0 sono
equivalenti a (R, T ) con T (1, 0, −1).
19. Verificare che il sistema di vettori applicati
• A1 (2, 0, −2), v1 = i − k
• A2 (0, 1, −1), v2 = 2j + k
• A3 (−1, 0, 0), v3 = −i − 2j
è equivalente ad una coppia di momento M = 3i + 2k.
20. Verificare che il sistema piano di vettori applicati
• A1 (1, 0), v1 = 2i + j
• A2 (0, 1), v2 = −i + 3j
• A3 (−2, 1), v3 = −3j
• A4 (5, −3), v4 = −i − j
è equilibrato.
3
Cinematica del punto
1. Studiare il moto di un punto si muove sul piano xy secondo le equazioni cartesiane
α 2
x = x0 + R cos( t + ωt)
2
y = y0 + R sin( α t2 + ωt)
2
con α, ω, R costanti positive.
2. Studiare il moto di un punto che si muove sul piano xy secondo le equazioni cartesiane
x = R cos ωt sin ωt
y = R cos2 ωt
con ω, R costanti positive.
3. Determinare la traiettoria di un punto che si muove sul piano xy secondo le equazioni cartesiane
x = a cos ωt
y = b sin ωt
con a, b, ω costanti positive.
4. Studiare il moto di un punto che si muove in un piano secondo le equazioni polari
ρ = R cos ωt
θ = ωt
5. Un punto P si muove con velocità v(t) = −ωR sin ωti + ωR cos ωtj + hk, con R, ω, h costanti. Sapendo
che inizialmente P occupa la posizione P0 (R, 0, 0), determinare le equazioni del moto, la traiettoria,
la legge oraria.
6. Un punto P si muove nel piano xy con velocità v(t) = 3bt2 i + 2ctj, con b, c costanti. Sapendo che
inizialmente P occupa la posizione P0 (0, 0), determinare le equazioni del moto e la traiettoria.
7. Studiare il moto di un punto che si muove su una retta con accelerazione a = −kv, k > 0.
8. Studiare il moto di un punto che si muove nel riferimento O, i, j, k con accelerazione
a = αv × k
α>0
9. Studiare il moto di un punto P che si muove di moto circolare in modo che il rapporto fra le componenti
tangenziale e normale dell’accelerazione sia k=costante.
10. Determinare la traiettoria di un punto P che si muove su un piano in modo che il rapporto fra le
velocità radiale e trasversa sia k=costante. Supponendo che il moto sia uniforme, determinare le
equazioni del moto.
11. Un punto P si muove di moto centrale rispetto al polo O sulla curva di equazione
ρ = Rehθ
h > 0. Determinare le equazioni del moto a partire dalle condizioni iniziali θ(0) = 0, θ̇(0) = ω0 .
4
12. Un punto P si muove in un piano Oxy con legge ẍ = 0, ÿ = −g, soddisfacendo all’istante iniziale le
condizioni x(0) = 0, y(0) = h, ẋ(0) = 0, ẏ(0) = 0. Determinare la traiettoria di P nel riferimento
Oxy e in un riferimento Oxy 0 che trasla uniformemente con velocità v = vi,
13. In un riferimento O, i, j, k un punto materiale P si muove con legge P − O = (x0 + vt)i. Determinare
l’equazione della traiettoria in un riferimento O, i0 , j0 , k, ruotante con velocità angolare costante ω= ωk.
Calcolare la velocità relativa di P .
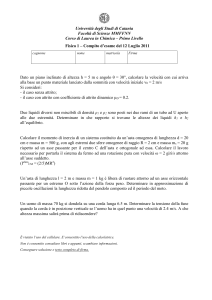
14. Un disco di raggio R ruota con velocità angolare ω = αt attorno ad un asse ad esso ortogonale e
passante per il centro. Un punto materiale P si muove lungo un diametro con legge s(t) = R sin λt.
Calcolare l’accelerazione assoluta di P .
y
s
O
.P
x
15. In un riferimento O, i, j, k un punto materiale P si muove con legge P − O = x0 i + vtk. Determinare
l’equazione della traiettoria in un riferimento O, i0 , j0 , k, ruotante con velocità angolare costante ω= ωk.
Calcolare la velocità relativa di P .
5
Cinematica del corpo rigido
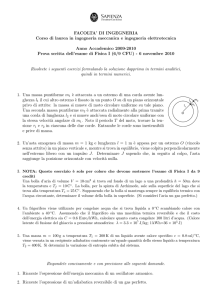
1. Determinare la velocità degli estremi A e B di un’asta AB = 2`, mobile in un piano Oxy il cui punto
medio scorre sull’asse x.
y
A
!
s
O
G
x
B
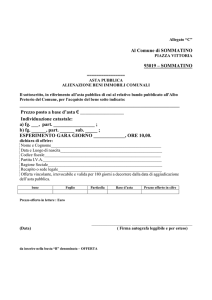
2. Un sistema mobile in un piano xy è costituito da due dischi D1 e D2 di raggio r e da un’asta AB
di lunghezza 6r. Il disco D1 rotola senza strisciare sull’asse y e D2 rotola senza strisciare sull’asse x.
Gli estremi A, B dell’asta sono incernierati nei centri di D1 e D2 . Determinare le velocità angolari di
D1 , D2 e dell’asta AB.
y
D1
A
!
D2
B
O
x
3. Un disco D di raggio r rotola senza strisciare all’esterno di una guida circolare C di raggio R. Determinare la velocità angolare di D
• nel caso che C sia fissa;
• nel caso che C ruoti attorno al suo centro O.
6
y
D
!
O
"
C
x
4. Un disco D di raggio r rotola senza strisciare all’interno di una guida C con profilo semicircolare di
raggio R. Determinare la velocità angolare di D
• nel caso che C sia fissa;
• nel caso che C trasli lungo l’asse x.
y
C
θ
D
O
x
5. Due dischi D1 e D2 di raggio r si muovono nel piano xy in modo che D2 rimanga a contatto con l’asse
x e D1 abbia un punto A vincolato a scorrere sull’asse y e rotoli senza strisciare su D2 . Determinare
la velocità di strisciamento di D2 sull’asse x.
y
D1
A
θ
ϕ
D2
O
x
7
6. Un’asta OA è libera di ruotare nel piano xy attorno al suo estremo O. Un disco di raggio R rotola
senza strisciare sull’asta ed è vincolato a rimanere a contatto con l’asse x. Determinare la velocità
angolare del disco e la velocità di strisciamento sull’asse x.
y
A
2!
O
x
7. Nel piano xy un sistema materiale è costituito da un’asta AB di lunghezza ` e da un disco di raggio
R. L’asta, avente punto medio M , è vincolata a passare per O, mantenendo un’inclinazione costante
α con l’asse x. Il disco rotola senza strisciare sull’asta. Detto u il versore parallelo all’asta e scelti
come parametri ξ e η, tali che M − O = ξu e H − O = ηu, determinare la velocità angolare del disco.
y
A
H
.
M
!
O
x
B
8. In un piano xy, un disco di centro G e raggio R si muove a contatto con l’asse x. Sapendo che G ha
velocità costante e che il disco ruota con velocità angolare costante, determinare
• la velocità di strisciamento del disco sull’asse x;
• il centro di istantanea rotazione;
• la base e la rulletta del moto del disco.
9. In un piano Oxy una circonferenza di raggio r è vincolata a passare per il punto O ed ha un suo punto
A vincolato a scorrere sull’asse y. Determinare il centro di istantanea rotazione, la base e la rulletta
per il moto della circonferenza.
8
O
x
G
A
y
10. Determinare il centro di istantanea rotazione, la base e la rulletta per il moto di un’asta nel piano
Oxy che ha un estremo scorrevole sulla semicirconferenza di centro O di raggio R posta nel semipiano
y > 0 ed è vincolata a passare per il punto H tale che H − O = −Rj.
y
A
θ
O
x
Ho
B
11. Determinare il centro di istantanea rotazione e la base per il moto di un’asta AB, vincolata a passare
per un punto O e il cui estremo A scorre su una retta fissa distante d da O.
y
B
d
θ
o
O
x
A
9
12. In un piano Oxy un disco D1 di raggio R rotola senza strisciare su una guida circolare fissa, di raggio
R e sul bordo di un disco D2 di raggio R, il cui centro scorre sull’asse y. Determinare la velocità
angolare del disco D2 , il centro di istantanea rotazione e la base per il moto di D2 .
y
O
x
D1
!
D2
10
Meccanica del punto
1. In un piano verticale Oxy, un punto materiale P di massa m è soggetto a due forze elastiche F1 =
−k(P − O) e F2 = −h(P − A) con A(`, 0). Determinare la configurazione di equilibrio. Scrivere le
equazioni del moto di P .
2. Un punto materiale P di massa m è mobile in un piano verticale Oxy. Oltre alla forza peso, il punto è
soggetto alla forza elastica F1 = −k(P −O) e alla forza F2 = α(yi+xj). Determinare la configurazione
di equilibrio. Scrivere le equazioni del moto di P .
3. Un punto materiale P di massa m è mobile in un piano verticale Oxy. Oltre alla forza peso, il punto è
soggetto alla forza elastica F = −k(P − O). Determinare la traiettoria di P sapendo che inizialmente
è in quiete nella posizione P0 (`, 0).
4. Un punto materiale P di massa m è mobile nello spazio sotto l’azione di una forza elastica di costante
k che lo collega con un punto fisso O. Sul punto agisce una forza viscosa R = −hv, h > 0. Studiare
il moto di P , sapendo che inizialmente occupa la posizione P0 (0, y0 , 0) con velocità v(0) = v0 j.
5. Un punto materiale P di massa m è mobile sotto l’azione di una forza F = qv × B, con B = Bk.
Determinare il moto di P , a partire dai dati iniziali P (0) = (0, 0, 0), v(0) = ẋ0 i + ż0 k.
6. Studiare il moto di caduta di un punto materiale P , di massa m, lanciato da un punto O con velocità
v(0) = v0x i + v0z k, supponendo che la resistenza dell’aria sia di tipo viscoso R = −hv, h > 0.
7. Un punto materiale P è mobile in un piano verticale Oxy, sotto l’azione di una forza elastica F1 =
−k(P − O), di una forza costante F2 = F i e della forza peso. Il piano è posto in rotazione uniforme
attorno all’asse y con velocità angolare ω. Determinare la configurazione di equilibrio relativo.
8. In un piano orizzontale Oxy un punto P di massa m è collegato al punto O da una molla di costante
elastica k e lunghezza di riposo nulla. Il piano ruota uniformemente attorno all’asse verticale z con
velocità angolare costante. Scrivere le equazioni del moto di P .
9. In un piano verticale Oxy, un punto materiale P di massa m è vincolato ad una guida circolare di
centro O e raggio R. Oltre alla forza peso sul punto agisce una forza F = −hv, h > 0. Scrivere
l’equazione del moto di P . Sapendo che inizialmente P occupa la posizione (0, R) con velocità v = v0 i,
calcolare la reazione vincolare all’istante iniziale.
y
P
.
!
O
x
10. Un punto materiale P di massa m è vincolato a scorrere su una guida rettilinea fissa posta in un piano
verticale Oxy e inclinata di un angolo α = π6 rispetto all’asse x. Oltre alla forza peso, sul punto agisce
una forza F = −hv, h > 0. Determinare il moto di P e la reazione vincolare, sapendo che inizialmente
si trova in O con velocità nulla.
11
!
O
x
P
.
s
y
11. Un punto materiale P di massa m è vincolato ad una guida circolare di centro O e raggio R posta
in un piano verticale Oxy. Oltre alla forza peso, il punto è soggetto alla forza elastica orizzontale
F = −k(P − H) che lo attrae verso il diametro verticale. Determinare le configurazioni di equilibrio
di P e la reazione vincolare all’equilibrio. Scrivere l’equazione del moto di P .
y
θ
.P
H
O
x
12. Un punto materiale P di massa m è mobile nel piano verticale Oxy, vincolato alla parabola di equazione
2
y = x2a , a > 0. Una molla di costante elastica mg
a collega P con il punto fisso A(4a, 0). Determinare
le configurazioni di equilibrio di P e la reazione vincolare all’equilibrio. Scrivere l’equazione del moto
di P .
.
O
A
P
x
.
y
13. Un punto materiale P di massa m è vincolato ad una guida circolare di centro O e raggio R posta in
un piano verticale Oxy ed è soggetto alla forza elastica orizzontale F = −k(P − H) che lo attrae verso
il diametro orizzontale. Determinare le configurazioni di equilibrio di P .
12
y
H
O
θ
.P
x
14. Un punto materiale P di massa m è vincolato ad una guida circolare di centro O e raggio R posta in
un piano verticale Oxy uniformemente ruotante attorno al suo diametro verticale con velocità angolare
ω. Determinare le configurazioni di equilibrio relativo di P .
y
θ
.P
O
x
13
Baricentri e matrici di inerzia
1. Determinare il baricentro delle seguenti figure
• arco di circonferenza omogeneo di centro O, raggio R e apertura 2α;
• settore circolare omogeneo di centro O, raggio R e apertura 2α;
• triangolo rettangolo omogeneo di cateti a e b;
• asta AB non omogenea di lunghezza a con densità ρ(P ) = k|P − A|;
• cono omogeneo di vertice V , raggio di base R e altezza h.
2. Determinare il baricentro delle seguenti figure omogenee
• quadrato di centro O e lato a sormontato da un triangolo isoscele di altezza 2a;
• disco di centro O e raggio R con foro circolare di raggio r e distanza d tra i centri.
3. Determinare la matrice di inerzia delle seguenti figure omogenee di massa m rispetto ad una terna
principale d’inerzia con origine nel baricentro
• asta di lunghezza `;
• circonferenza di raggio R;
• disco di raggio R;
• rettangolo di dimensioni a, b;
4. Determinare la matrice di inerzia di un settore circolare omogeneo di raggio R, apertura 2α e massa
m rispetto ad una terna principale d’inerzia con origine nel centro del settore.
5. Determinare la matrice di inerzia delle seguenti figure omogenee rispetto ad una terna di origine O
• quadrato di lato L e massa m con foro quadrato concentrico di lato `;
• corona circolare di raggi R, r e massa m;
• asta OA di lunghezza 2a e massa m ortogonale all’asta AB di lunghezza 2b e massa m.
B
O
O
O
A
O
14
6. Un corpo rigido è costituito da un disco omogeneo di centro C, raggio r e massa µ e da un’asta
omogenea AB di massa ν e lunghezza 4r che ha l’estremo A saldato in un punto del bordo del disco
in modo che A, B e C risultino allineati. Determinare µ e ν in modo che la massa del sistema sia 3m
e il baricentro dal corpo coincida con A. Scrivere la matrice di inerzia del corpo rispetto al punto A.
C
A
B
7. Un corpo rigido è costituito da due aste omogenee AB e CM di ugual massa m e di lunghezza 2` e 4`
rispettivamente, saldate perpendicolarmente tra loro in modo tale che M sia il punto medio di AB.
Determinare la posizione del baricentro G del corpo e scrivere la matrice di inerzia rispetto ad una
terna principale di inerzia centrata in G.
B
C
M
A
15
Quantità meccaniche
1. Un corpo rigido è costituito da un’asta AO di lunghezza ` e massa M e da una lamina quadrata
di lato
√
` e massa m, all’interno della quale è praticato un foro concentrico quadrato di lato `/ 2. Il corpo è
incernierato in O. Scrivere l’energia cinetica e il momento della quantità di moto rispetto al punto O.
y
A
θ
x
O
2. Un corpo rigido di massa m è costituito da un disco di raggio R e centro K a cui è stato praticato un
foro di raggio R2 e centro H distante R2 da K. Determinare la matrice d’inerzia rispetto ad una terna
principale di origine K. Supponendo che il corpo rotoli senza strisciare sull’asse x, scrivere l’energia
cinetica.
y
H
K
O
C
s
x
3. In un piano Oxy un’asta omogenea AB di lunghezza 2` e massa m ha l’estremo A scorrevole sull’asse
x. Scrivere l’energia cinetica e il momento della quantità di moto rispetto ad O.
y
s
A
x
O
θ
B
4. Due aste omogenee OA e AB di massa m e lunghezza 2` sono mobili in un piano verticale Oxy in
modo che l’asta OA sia incernierata in O e l’asta AB abbia l’estremo A incernierato all’asta OA e
l’estremo B scorrevole sull’asse x. Determinare l’energia cinetica e il momento angolare rispetto ad O.
y
A
!
O
B
x
O
16
Meccanica del corpo rigido
1. Due aste omogenee OA e AB di massa m e lunghezza ` sono mobili in un piano verticale Oxy in modo
che l’asta OA sia incernierata in O e l’asta AB abbia l’estremo A incernierato all’asta OA e l’estremo
B scorrevole sull’asse x. Una molla di costante elastica k = mgα
` collega A con il punto H sull’asse x,
rimanendo verticale. Determinare le configurazioni di equilibrio discutendone la stabilità al variare di
α. Scrivere l’equazione del moto del sistema e determinare eventuali integrali primi.
y
A
!
O
H
B
x
O
2. In un piano verticale Oxy un disco omogeneo di massa m e raggio ` rotola senza strisciare sull’asse x.
Un’asta AB di lunghezza 8` e massa m ha l’estremo A incernierato nel centro del disco e B scorrevole
sull’asse y. Una molla di costante elastica k collega il punto medio dell’asta con il punto H sull’asse
y, mantenendosi orizzontale. Sul disco è applicata una coppia di momento costante M = −αmg`k.
Scelta come coordinata libera l’angolo θ che l’asta forma con l’asse y, determinare per quale valore di
α la configurazione θ = π3 è di equilibrio e discuterne la stabilità.
y
B
θ
M
H
A
x
O
3. In un piano verticale Oxy un disco di massa m e raggio R√ si appoggia senza attrito sull’asse y ed è
soggetto ad una forza elastica F = −k(G − A) con A(0, R 23 ). Un’asta OB, omogenea di massa m e
√
lunghezza 4 3R è incernierata in O e appoggiata senza attrito al disco. Detto θ l’angolo tra l’asta
e l’asse y, determinare il valore di k per cui θ = π3 è una configurazione di equilibrio. Calcolare le
reazioni vincolari in O e H.
O
A
H
y
x
!
G
O
B
4. In un piano verticale Oxy un sistema materiale
√ è costituito da un disco omogeneo di massa m e raggio
r e da un’asta omogenea AG di lunghezza r 2 incernierata nel centro G del disco e avente l’estremo
17
A vincolato a scorrere sull’asse x. Il disco rotola senza strisciare sull’asse x. Una molla di costante
elastica k e lunghezza di riposo nulla, collega B con O. Sul disco è applicata una coppia di momento
M = αk(G − O) × (G − H), con α ∈ R.
• Determinare le configurazioni di equilibrio, discutendone la stabilità al variare di α 6= −1;
• Determinare un integrale primo di moto.
y
A
s
O
B
x
H
5. In un piano verticale Oxy un’asta AB, omogenea di massa m e lunghezza ` ha gli estremi A, B vincolati
a scorrere sugli assi x, y. Il piano è posto in rotazione uniforme con velocità angolare ω attorno all’asse
y. Determinare le configurazioni di equilibrio relativo, discutendone la stabilità al variare di ω.
O
B
x
θ
A
ω
O
y
6. In un piano verticale Oxy un’asta AB omogenea di massa m e lunghezza ` ha il baricentro G scorrevole
senza attrito sull’asse x. L’asta trasla mantenendo un’inclinazione costante α = π4 sull’asse x. Un disco
di centro C, massa m e raggio R rotola senza strisciare sull’asta. Sul disco è applicata una coppia di
momento M = mg
R (C − H) × (C − G). Determinare eventuali integrali primi di moto.
y
C
A
H
!/4
O
G
x
B
18
√
7. In un piano verticale un quadrato ABCD omogeneo di massa m e lato 2` ha un vertice A scorrevole
sull’asse x e il baricentro G collegato ad O da una molla di costante elastica k = 2mg
` .
• Determinare le configurazioni di equilibrio discutendone la stabilità.
• Calcolare l’accelerazione del baricentro all’istante iniziale sapendo che il quadrato é inizialmente
in quiete con il vertice A coincidente con O e il vertice C sull’asse x.
ξ
O
A
x
θ
D
G
B
C
O
y
8. In un piano verticale Oxy un’asta AB omogenea di massa m e lunghezza 2` é incernierata nel suo
punto medio O. Un punto P di massa m é vincolato all’asta ed é collegato ad O mediante una molla di
costante elastica mg
2` e lunghezza di riposo nulla. Determinare le configurazioni di equilibrio ordinarie
e di confine discutendo la stabilitá di quelle ordinarie.
y
A
P
.
s
!
O
x
O
B
9. In un piano verticale Oxy, un sistema materiale è costituito da un’asta AB omogenea di lunghezza
` e massa m avente gli estremi A, B vincolati a scorrere sugli assi x, y e da un punto P di massa m
vincolato all’asse x e collegato a B mediante una molla di costante elastica k e lunghezza di riposo nulla.
Il piano Oxy ruota uniformemente con velocitá angolare ω attorno all’asse y. Scrivere le equazioni del
moto.
O
B
!
P
.
x
"
A
#
O
y
19
10. In un piano verticale Oxy un’asta AB omogenea di massa m e lunghezza 2` ha l’estremo A collegato ad
O mediante una molla di costante elastica k e l’estremo B scorrevole senza attrito sull’asse x. Scrivere
le equazioni del moto.
ξ
O
B
θ
x
A
O
y
11. In un piano verticale Oxy un disco di massa m e raggio R rotola senza strisciare sull’asse x. Un’asta
di lunghezza 2` e massa m ha un punto H, distante 2` da A, incernierato nel centro del disco. Una
molla di costante k e lunghezza di riposo nulla collega B all’asse y mantenendosi orizzontale. Sul disco
è applicata una coppia di momento costante M = mgRk. Scrivere le equazioni del moto del sistema.
y
A
H
s
θ
O
x
B
O
12. In un piano verticale Oxy un disco omogeneo di massa m e raggio R rotola senza strisciare sull’asse
x. Un’asta AB di lunghezza ` e massa trascurabile ha l’estremo A incernierato nel centro del disco
e B scorrevole sull’asse y. Una molla di costante elastica k collega il punto medio dell’asta con il
punto H sull’asse y, mantenendosi orizzontale. Sul disco è applicata una coppia di momento costante
M = −αk`Rk. Scelto come parametro lagrangiano l’angolo θ che l’asta forma con l’asse y, scrivere
l’equazione del moto del sistema
20
y
B
!
M
H
A
O
O
x
13. In un piano verticale un sistema materiale é costituito da un’asta AB di lunghezza 2` e massa m e da
un punto P di massa m. Gli estremi A, B dell’asta sono vincolati a scorrere sugli assi x, y e il punto
P é vincolato all’asse x. Una molla di costante elastica k e lunghezza di riposo nulla, collega P a G.
Sull’asta agisce inoltre una forza costante F = F i applicata in A. Scrivere le equazioni del moto per
il sistema.
y
B
P
!
G
O
O
" P
A
x
14. In un piano verticale un’asta AB di lunghezza 2` e massa m ha il baricentro G scorrevole su una retta
fissa, inclinata di π6 sull’orizzontale. Sull’asta agiscono una forza elastica Fe = mg
` (G − O) e la forza
q
viscosa Fv = −2m g` vG applicata in G. Scrivere ed integrare le equazioni del moto. Calcolare la
reazione vincolare.
y
G
A
ξ
O
B
G
θ
π/6
O
x
21
Soluzioni
Calcolo vettoriale
√
√
√
1. |Q − O| = 2 3, vers(Q − O) = 12 i − 23 j, |(P − O) + (Q − O)| = 2 7,
√
(R − O) = 2j, |R − Q| = 2 7, α = π − arctan √53 .
(P − Q) =
√
3i + 5j,
√
√
√
√
2. |(P − O) + 2(Q − O)| = 100 + 24 6 − 24 2, |P − Q| = 52 + 12 2 − 12 6.
√
√
√
3. |P − Q| = 6, |P − R| = 14, |Q − R| = 6
4. 2(P − O) + (Q − O) − 3(R − Q) = −4i + 8j − 5k.
√
√
5. |(P − O)| = 4, |(Q − O)| = 3, (P − O) · (Q − O) = −6, |(P − O) × (Q − O)| = 2 3.
√
√
√
√
√
√
6. (P −O)·(Q−O) = 2 2+3 3, (P −O)×(Q−O) = (3 2−2 3)k, (Q−O)×(P
−O)
3−3 2)k,
√ = (2 √
√
(P − O) · (Q − O) × (R − O) = 0, √[(P − √
O) × (Q −√O)] ×√(R − O) = (2 3 − 3 2)i + (4 6 − 12)j,
(P − O) × [(Q − O) × (R − O)] = (3 2 − 6 6)i + (2 2 − 4 6)j
√
√
√
7. (P − O) · (Q − O) = 4 2,
(Q − O) · (R − O) = −5 2,
(Q − O) × (R − O) = 3i + 5 2k,
(P − O) × (Q − O) · (R − O) = 6, (R − O) · (Q − O) × (P − O) = −6,
√
√
√
√
[(P − O) × (Q − O)] × (R − O) = 5 2i − 5 2j + 5k, (P − O) × [(Q − O) × (R − O)] = 3 2i − 6 2j − 3k.
8. v = −λi + λj − 3k, λ ∈ R.
9. non esiste v.
10. v = (−2 + 2λ)i + ( 52 + λ)j + (− 12 − λ)k, λ ∈ R.
11. R = −2i + 2k, M0 = 10i − 12j,
√
12. M = 5 5i − 8j + 6k, b = 3.
13. x = −2λ,
y = 4 + 4λ,
MO0 = 10i − 8j,
I = −20,
Mz = 0.
z = −4 + 4λ.
14. R = 3i + 2j − 3k, MO = −15i + 5j − 2k, MO0 = −3i − 7j + 2k,
45
centrale: x = 12 + 3λ, y = 51
22 + 2λ, z = 22 − 3λ.
4
8
15. M = − 12
7 i + 7 j − 7 k.
1 1 1
16. C(− , , − )
4 4 4
2 1 3
17. C( , , )
5 5 5
Cinematica del punto
1. Moto uniformemente vario con traiettoria: (x − x0 )2 + (y − y0 )2 = R2 .
=
R2
4 .
+ y2 =
R2
4 .
2. Moto uniforme con traiettoria: x2 + (y −
R 2
2)
3. Ellisse con semiassi a e b.
4. Moto uniforme con traiettoria: (x −
R 2
2)
5. x = R cos ωt, y = R sin ωt, z = ht, moto elicoidale uniforme.
22
Mz = −2,
I = −29,
asse
6. x = bt3 , y = ct2 , y =
7. x =
v0
k (1
c
b2/3
x2/3 .
− e−kt ) + x0 .
8. x = c1 sin(αt + ϕ0 ) + c2 , y = c1 cos(αt + ϕ0 ) + c3 , z = c4 t + c5 .
9. s = − R
k ln(kt + c1 ) + c2 .
10. ρ = Rekθ , ρ = c1 t + c2 , θ =
11. ρ = R(2kω0 t + 1)1/2 , θ =
12. x = 0, y 0 = −
1
2k
1
k
ln
c1
Rt
+
c2
R
.
ln(2kω0 t + 1).
gx2
+ h.
2v 2
13. x0 = (x0 + vt) cos ωt, y 0 = −(x0 + vt) sin ωt, z 0 = 0,
vrel = [v cos ωt − ω(x0 + vt) sin ωt]i0 − [v sin ωt + ω(x0 + vt) cos ωt]j0 .
2
2
14. aass = −R[(λ2 sin λt + α2 t2 sin λt) cos αt2 + (α sin λt + 2αλt cos λt) sin αt2 ]i
2
2
+R[−(λ2 sin λt + α2 t2 sin λt) sin αt2 + (α sin λt + 2αλt cos λt) cos αt2 ]j.
15. elica cilindrica di raggio x0 , vrel = −ωx0 sin ωti − ωx0 cos ωtj + vk.
Cinematica del corpo rigido
1. vA = (ẋ + `θ̇) sin θi − `θ̇ cos θj,
2. ω1 = −6 sin θθ̇k,
3. ω =
R+r
θ̇k,
r
4. ω = −
vB = (ẋ − `θ̇) sin θi + `θ̇ cos θj.
ω1 = −6 cos θθ̇k,
ω=
ωAB = θ̇k.
R+r
R
θ̇ − ϕ̇k.
r
r
R−r
θ̇k.
r
5. v = r(θ̇ cos θ + 2ϕ̇ sin ϕ + 2ϕ̇ − θ̇)i.
6. ω = −
7. ω =
Rθ̇ cos θ
k,
1 − cos θ
v=−
Rθ̇(1 + cos θ)
i.
1 − cos θ
ξ˙ − η̇
k
R
8. v = (v0 + ωR)i, (C − G) =
v0
v0
v0
j, base: y = R + , rulletta: circonferenza di centro G e raggio .
ω
ω
ω
9. base: circonferenza di centro O e raggio 2r, rulletta: circonferenza di centro G e raggio r.
10. base: semicirconferenza di centro O e raggio R, rulletta: quadrante di circonferenza di centro A e
raggio 2R.
11. base: y 2 = dx.
12. ω = −2θ̇k,
base: ellisse di centro O e semiassi r e 4r.
Meccanica del punto
23
1. x =
h`
,
k+h
y=−
mg
.
k+h
mgα
mgk
, y= 2
, α2 6= k 2 .
a2 − k 2
α − k2
mg x
3. y =
( − 1)
k `
!
r
√
k
+ y0 e−t k/m ,
4. x = 0, y = v0 t + y0 t
m
2. x =
5. x =
mẋ0
qBt
sin
,
qB
m
6. x =
mv0x
(1 − e−ht/m ),
h
7. x =
F
,
k − mω 2
y=
mẋ0
qBt
(cos
− 1),
qB
m
y = 0,
y=−
mg
,
k
z=
9. mRθ̈ + hRθ̇ − mg cos θ = 0,
5mg,
ẍ
−
mg
k .
1
z = − gt2 + ż0 t.
2
m
mg
mg
(v0z +
)(1 − e−ht/m ) −
t.
h
h
h
v02
+ g)
R
√
mg 3
Φ=
.
2
Φ(0) = m(
mg m −ht/m m
e
−
+t ,
2h h
h
mg
11. θ = 0, π, ± arccos
, se mg ≤ kR
kR
Rθ̈ + kR sin θ cos θ − mg sin θ = 0.
√
k/m
mÿ + 2mω ẋ − (mω 2 − k)y = 0.
10. s(t) =
Φ=
√
mg −t
k e
k 6= mω 2 .
8. mẍ − 2mω ẏ − (mω 2 − k)x = 0,
12. x = 2a,
p
z = gt m
k +
Φ0 = −mg,
Φπ = mg,
Φθ = −kR,
p
g2
xẋ2
+ 2 x3 − 4ag = 0.
a2 + x2 + √
a2 + x2 2a
mg
, se mg ≤ kR.
kR
g
g
14. θ = 0, π, −π + arccos 2 , π − arccos 2 , se g ≤ ω 2 R.
ω R
ω R
13. θ = 0, π, ± arccos
Baricentri e matrici di inerzia
R sin α
1. OG =
,
α
2. OG =
3. I1 = 0,
I1 =
4. I1 =
7
a,
12
2R sin α
OG =
,G
3α
OG = −
ma2
,
12
a b
,
,
3 3
2
AG = `,
3
V G = 43 h.
dR2
R2 − r 2
m`2
12
mb2
I2 =
,
12
I2 = I3 =
mR2
,
2
m(a2 + b2 )
I3 =
12
mR2
sin α cos α
(1 −
),
2
α
I1 = I2 =
I2 =
I3 = mR2 ;
mR2
sin α cos α
(1 +
),
2
α
24
I1 = I2 =
I3 = mR2 .
mR2
;
4
I3 =
mR2
2
m
m
m
m
5. I1 = I2 = (L2 + `2 ), I3 = (L2 + `2 ),
I1 = I2 = (R2 + r2 ), I3 = (R2 + r2 ),
12
6
4
2
4 2
16
4
2
2
2
I11 = mb , I22 = ma
I33 = m(4a + b ) I12 = −2mab I13 = I23 = 0
3
3
3
6. µ = 2m,
7. GM = `,
ν = m,
1
I1 = mr2 ,
2
1
I1 = m`2 ,
3
Quantità meccaniche
`2 1
5
1. T =
M + m θ̇2 ,
2 3
2
2. I1 =
11
mR2 ,
48
I2 =
I2 =
47
mR2 ,
6
I2 =
10 2
m` ,
3
KO =
5
mR2 ,
16
25
mR2
3
11 2
m` .
3
5
1
M + m `2 θ̇k.
3
2
I3 =
2
1
3. T = mṡ2 + m`2 θ̇2 − m`ṡθ̇ cos θ,
2
3
I3 =
I3 =
37 1
13
1
mR2 , T = mR2
− cos θ θ̇2
16
2
24 3
4 2
KO =
m` θ̇ + mσ̇ cos θ + m`σ θ̇ sin θ k
3
5
1
4. T = m`2 θ̇2 + m`2 θ̇2 (9 sin2 θ + cos2 θ),
6
2
KO = 4m`2 θ̇k.
Meccanica del corpo rigido
π
1
π
instabile, θ2 = − stabile se α ≤
2
2
4
1
1
1
θ3,4 = − arcsin
, −π + arcsin
con α ≥ stabili.
4α
4α
4
1
2
2
2m`
+ sin θ θ̈ + 2m`θ̇ sin θ cos θ − mg cos θ − 4k` sin θ cos θ = 0,
3
1. θ1 =
E = cost.
3
2. α = − , instabile
2
5mg
3. k = √ ,
3R
4. s = −
φH
√
13 3
=
mgi,
6
αr
(stabile se α > −1),
r+1
√
φ0 = −
3
1
mgi + mgj.
2
2
5
1
E = mṡ2 − (α + 1)ks2 − αkrs
4
2
5. θ1 = 0, (stabile se 3g ≥ 2`ω 2 ), θ2 = π (instabile), θ3,4 = ± arccos
√
√
3 ˙2
2 ˙
g 2
2
6. ṡ + ξ +
ṡξ −
ξ +
gξ = cost.,
4
2
2R
2
2
π
7. ξ1 = 0, θ1 =
(instabile),
2
√
3
5π
ξ4 =
`, θ4 =
(stabile),
2
6
8. s1 = 0, θ1 = 0 (instabile),
4ṡ +
√
3g
se 3g < 2`ω 2 (stabili).
2`ω 2
2ξ˙ = cost.
π
ξ2 = 0, θ2 = − (instabile),
2
3
aG (0) = −2gi + gj.
4
s2 = 0, θ2 = π (instabile),
√
ξ3 = −
π
s3 = `, θ3 = − ,
2
3
π
`, θ3 =
(stabile),
2
6
s4 = −`, θ4 =
1
˙ 2 + 1 m`2 θ̇2 − 1 kξ 2 + mg` cos θ + 1 mω 2 (ξ 2 + 2`ξ sin θ + 4 `2 sin2 θ)
9. L = m(`θ̇ cos θ + ξ)
2
6
2
2
2
3
25
π
2
10. mξ¨ + m`θ̈ sin θ + m`θ̇2 cos θ + kξ − 2k` cos θ = 0,
k
7
11. s̈ cos θ + `θ̈ + g sin θ +
6
m
9
` sin θ + 3s = 0,
2
4
m`θ̈ + mξ¨ sin θ − mg cos θ + 2kξ sin θ = 0.
3
5s̈ + `θ̈ cos θ − `θ̇2 sin θ + km (3` sin θ + 2s) − 2gs = 0
1 3
1
mg
12. m`( + cos2 θ)θ̇ + k` sin θ cos θ −
sin θ − k` cos θ = 0
3 2
4
2
1
m`θ̈ − mg sin θ − kξ cos θ + 2F cos θ = 0
3
r √
`
`
g
−t g/`
˙
ξ0 −
,
ξ = (At + B)e
+ , con A = ξ0 +
2
`
2
13. mξ¨ + kξ − k` sin θ = 0,
14. θ = θ̇0 t + θ0 ,
26
`
B = ξ0 − ,
2
√
3
φG =
mg.
2
 di")