Sul blocco 1 agiscono la forza peso m 1g, la reazione vincolare")
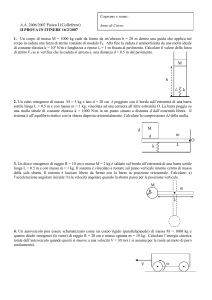
1) Sul blocco 1 agiscono la forza peso m1g, la reazione vincolare del piano N e la
tensione della fune T1; sul blocco 2 agiscono la forza peso m1g e la tensione della
fune T2. Dato che la carrucola non ha massa trascurabile è necessario considerare
anche le forze agenti su di essa e precisamente la forza peso Mg, la reazione
vincolare del perno S, e le forze applicate dalla fune alla carrucola che, essendo
la fune di massa trascurabile, possiamo considerare applicate nei punti di attacco
A e B della corda al bordo della carrucola; queste forze risultano in base al
principio di azione e reazione uguali a – T1 e – T2. Oltre queste forze che
agiscono comunque, sia in condizioni statiche che dinamiche, si dovranno
considerare nella domanda a) la forza F applicata al blocco 1 , oppure nella
domanda b) la coppia di forze di momento M (non riportata in figura).
y
N
F
S
T1
- T1
A
CB
m1g
Mg
x
-T2
T2
m2 g
a) All’equilibrio deve essere soddisfatta per ciascuno dei tre corpi la I equazione
cardinale della statica :
F + N + m1g + T1 = 0
T2 + m 2 g = 0
S - T1 – T2 + Mg= 0
Inoltre per la carrucola deve essere soddisfatta anche la II Equazione cardinale della
statica e, scegliendo come centro di riduzione il centro della carrucola e verso
positivo di rotazione quello orario, si ha:
T2r- T1r = 0
Æ
T1 = T2
(1-1)
Proiettando le prime tre equazioni lungo gli assi orizzontale (x) e verticale (y) si ha
-F + T1 = 0
Sx – T1 = 0
T 2 - m2g = 0
Sy – T2 - Mg= 0
Tenuto conto dell’eq. (1.1) si ricava infine:
F = T1 = T2 = m2g
Sx = T1 = m2g
Sy = (m2 + M)g
Numericamente quindi si ha F = 29.4 N , Sx = 29.4 N e Sy = 35.3 N.
b) In questo caso la forza F , agente sul blocco 1, è assente ma l’equilibrio viene
mantenuto applicando alla carrucola una coppia di forze (che per definizione ha
risultante nulla) di momento assiale M . Le equazioni scritte al punto a) vengono
pertanto così modificate:
N + m1g + T1 = 0
T2 + m 2 g = 0
S - T1 – T2 + Mg= 0
T2r- T1r +M = 0
Proiettando lungo l’asse orizzontale e verticale si ha adesso:
T1 = 0
Sx – T1 = 0
T 2 - m2g = 0
Sy – T2 - Mg= 0
Da cui:
T2 = m2g
Sx = T 1 = 0
M = - m2gr
Sy = (m2 + M)g
In questo la tensione della fune è diversa nei due punti di attacco A e B alla carrucola
e l’equilibrio è assicuratao dalla coppia di forze il cui momento ha verso opposto a
quello prodotto dalla forza -T2 agente sulla carrucola (verso orario); numericamente
risulta M = - 1.47 Nm.
c) Nel caso dinamico il moto del sistema è determinato scrivendo la I Equazione
cardinale della dinamica (IECD) per i corpi 1 e 2 e la II equazione cardinale della
dinamica (IIECD) per la carrucola; la IECD per la carrucola determina unicamente la
reazione vincolare del perno S ( peraltro diversa da quella trovata nei casi statici) e
non è necessaria. Indicati con a1 e a2 le accelerazioni dei blocchi 1 e 2
rispettivamente, con a l’accelerazione angolare della carrucola (assunto sempre come
verso positivo di rotazione quello orario) e con I = Mr2/2 il suo momento d’inerzia
rispetto all’asse passante per C si ha:
N + m1g + T1 = m1a1
T2 + m2g = m2a2
T2r- T1r = Ia
Essendo la corda inestensibile si ha a1 = - a2 = a (il segno – deriva dalla orientazione
degli assi x ed y per cui ad uno spostamento del blocco 1 nel verso positivo dell’asse
x corrisponde un uguale spostamento del blocco 2 nel verso negativo dell’assse y);
non essendovi slittamento della corda nella gola della carrucola i vari punti della
corda hanno la stessa velocità dei punti della carrucola con cui sono a contatto e
quindi ar = a (in questo caso il segno positivo deriva dal fatto che ad uno
spostamento del blocco 1 nel verso positivo dell’asse x corrisponde una rotazione
della carrucola in verso orario, ossia nel verso assunto come positivo). Proiettando le
precedenti equazioni lungo gli assi x e y si ottiene quindi:
T 1 = m1a
T2 - m2g = -m2a
T2r - T1r = Ia= Ia/r
Da cui risolvendo:
a = gm2/( m1 + m2 + I/r2) = gm2/( m1 + m2 + M/2)
T1 = m1gm2/( m1 + m2 + I/r2) = gm1m2/( m1 + m2 + M/2)
T2 = m2g(m1 + I/r2)/(m1 + m2 + I/r2) = gm2(m1 + M/2)/(m1 + m2 + M/2)
Il moto del sistema è quindi uniformemente accelerato con accelerazione a = 5.55
m/s2 e le tensioni della corda mantengono durante il moto un valore costante T1 =
11.1 N e T2 = 12.8 N.
[N.B. Si osservi che in generale, anche in presenza di carrucole o simili, le tensioni
che assumono le funi sono differenti nel caso statico e nel caso dinamico. Inoltre
sono differenti, a priori, le tensioni applicate dalla fune nei due punti di attacco, A e
B, da una parte e dall’altra di una stessa carrucola; solo nel limite di massa della
carrucola trascurabile, ossia M = 0, i valori di T1 e T2 sono uguali. ]
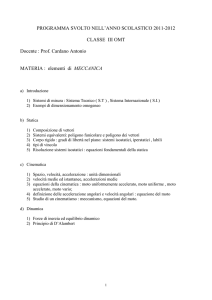
2) Consideriamo separatamente i componenti il sistema e le forze agenti su di essi.
Sui corpi 1 e 2 appesi agli estremi delle funi agiscono rispettivamente le forze
peso m1g e m2g e le tensioni delle funi T1 e T2. Sull’argano costituito dai due
tamburi, solidali tra loro e coassiali, agiscono la forza peso complessiva (m + M)g
e la reazione vincolare del perno S , applicate entrambe nel centro dell’argano, e
le tensioni –T1 e –T2 delle funi applicate al bordo dei tamburi di raggio r ed R
rispettivamente. La statica e la dinamica del sistema possono essere determinate
scrivendo la IEC per I corpi 1 e 2 e la IIEC per l’argano. Si assume come verso
positivo di rotazione quello orario ed un asse verticale orientato positivamente
verso l’alto.
a) All’equilibrio si ha:
-M1g + T1 = 0
T2 - M2g = 0
-T2R + T1r = 0
Risolvendo il sistema si ha quindi immediatamente
Me = M2 = M1r/R
T1 = M1g
Numericamente Me = 16.66 Kg , T1 = 981 N , T2 = 163.5 N.
T2 = M2g = M1gr/R
S
mg
-T2
-T1
Mg
T2
M2g
T1
M1g
b) Nel caso dinamico le equazioni di moto dei tre componenti sono:
-M1g + T1 = M1a1
T2 - M2g = M2a2
T1r - T2R = Ia
2
2
Dove I = MR /2 + mr /2 è il momento d’inerzia dell’argano pari alla somma dei
momenti d’inerzia dei due dischi imperniati su uno stesso asse passante per il loro
centro.
Le relazioni cinematiche fra le tre accelerazioni sono determinate dalla condizione
che i punti dei tamburi a contatto con le funi abbiano la stessa velocità delle funi
avvolte su di essi (nell’ipotesi che non vi sia slittamento); quindi tenuto conto
dell’orientazione dell’asse verticale e del verso positivo di rotazione (orario) si ha:
v2 = wR
v1 = -wr
Da cui derivando membro a membro:
a2 = aR
a1 = -ar
Tenuto conto di queste relazioni risulta:
a = g(M1r – M2R)/(I + M2R2 + M1r2)
T1= M1g(I + M2R2 + M2rR)/(I + M2R2 + M1r2)
T2= M2g(I + M1r2 + M1rR)/(I + M2R2 + M1r2)
Il moto è quindi uniformemente accelerato ed il verso di rotazione risulta positivo se
M1r > M2R , negativo in caso contrario.
c) Per M2 = 2Me = 2M1r/R si ottiene:
a = -gM1r/(I + 4rRM1 + M1r2)
a = - 3.22 rad/s
Per M2 = Me/2 = M1r/2R si ha invece:
a = gM1r/2(I + rRM1/4 + M1r2)
a = 6.20 rad/s
d) Nel caso in cui sia applicato all’asse del sistema un dispositivo che mantiene costante
la velocità del sistema , sono nulle le accelerazioni ma il dispositivo dovrà applicare
all’asse una opportune coppia di momento M. Le equazioni di moto sono pertanto:
-M1g + T1 = 0
-T2R + T1r + M = 0
Æ
T2 - M2g = 0
M = -g(M1r – M2R)
Quindi per M2 = 2Me = 2M1r/R si ha M = gM1r , ossia M = 98.1 Nm ; invece per M2
= Me/2 = M1r/2R si ha M = -gM1r/2 ossia M = 49.05 Nm.
La potenza scambiata dal sistema W è ottenuta immediatamente come :
W = M w = -g(M1r – M2R)w = - gM1v1 + gM2v2
Come si vede da questa espressione la potenza risulta positiva ( fornita dal motore al
sistema) o negativa (in questo caso è il sistema che fornisce energia al motore ) a
seconda del verso della velocità in relazione al momento M ; ovviamente la potenza
W è pari alla variazione per unità di tempo dell’energia potenziale delle forze peso,
come risulta dall’ultima espressione. Quindi per una velocità angolare positiva (
oraria) si ha nei due casi considerati: W = gM1rw , ossia W = 7.85 KW, e W = gM1rw/2 ossia W = - 3.924 KW.
3) Sulla sbarra agiscono in ogni situazione ( statica o dinamica) la forza peso mg .
applicata nel centro di massa C e la reazione vincolare di appoggio N ,
perpendicolare al piano ed applicata nell’estremo B.
a) Nel caso in cui l’equilibrio sia assicurato da una forza F ,applicata nell’estremo A,
la IEQS richiede che:
F + mg + N = 0
Questa equazione , essendo N ed mg dirette lungo la verticale, impone che sia nulla
anche la componente orizzontale di F. Pertanto proiettando lungo l’asse verticale si
ha:
F – mg + N = 0
F
y
A
N
C
f
x
B
mg
Dalla IIEQS , scelto come centro di riduzione C e come verso positivo quello orario,
si ha:
( N - F )lsinf/2 = 0
Æ
N=F
da cui infine F = F = 5.9 N.
b) Rimossa la forza F la sbarra inizia a muoversi sotto l’azione della forza peso e
della reazione vincolare, entrambe dirette lungo la verticale; essendo quindi nulla
la componente orizzontale delle forze esterne , agenti sulla sbarra, risulta che è
costante la componente orizzontale della quantità di moto della sbarra , ovvero la
componente orizzontale della velocità del CM della sbarra C. Dato che la sbarra
parte da ferma risulta vCx = 0 e pertanto C si muove lungo la retta verticale
passante per la posizione iniziale del CM.
C
C
C
In formule possiamo scrivere quindi:
vCx = dxC/dt = 0 Æ
xC = cost
Muovendosi C lungo una retta verticale la posizione della sbarra ad un determinato
istante può essere determinata completamente in termini dell’angolo f ; il sistema può
quindi essere considerato come avente un solo grado di libertà e la sua equazione di
moto, essendo le forze in gioco conservative, può essere determinata utilizzando la
conservazione dell’energia. Detto I = ml2/12 il momento d’inerzia della sbarra
rispetto ad un asse passante per il CM, scelto il piano orizzontale come livello di
riferimento per l’energia potenziale delle forze peso ( V = 0 ) si ha:
Iw2/2 + mvCy2/2 + mglcosf/2 = mglcosb/2
Dove si è tenuto conto , nello scrivere l’energia cinetica del CM, che vCx = 0. Per
determinare completamente la velocità di C in funzione dell’angolo f è necessario
tener conto della relazione che sussiste fra w e vCy ; risultando durante tutto il moto yC
= lcosf/2 si ha derivando membro a membro questa relazione:
vCy = -wlsinf/2
Sostituendo nella precedente equazione, tenendo conto dell’espressione di I, si ottiene
quindi:
w2 = 12g(cosb – cosf )/l(1 + 3sin2f )
Questa equazione insieme con la precedente fornisce immediatamente il valore della
velocità di C.
c) Un’istante prima che la sbarra tocchi il terreno l’angolo f differisce per
un’infinitesimo da 90°, quindi , essendo b = 30° , si ha per la velocità angolare e
per la velocità di C :
w = (3÷3g/2l)0.5
vCy = -(3÷3gl/2)0.5/2
La velocità dei punti A e B è determinata mediante la “formula fondamentale della
cinematica dei corpi rigidi” una volta nota la velocità di C e la velocità angolare. Si
ottiene allora:
vAx = vBx = 0
vAy = 2 vCy = -(3÷3gl/2)0.5
vBy =0
Numericamente si ha: w = 7.14 rad/s , vCy = -1.78 m/s e vAy = - 3.57 m/s.
[Osservazione – Alla domanda c) si può anche rispondere, in modo equivalente,
scrivendo le coordinate dei punti A e B in funzione di f e derivando queste rispetto al
tempo.]
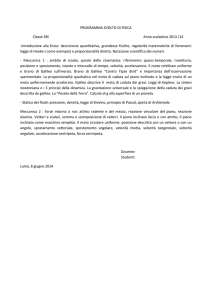
4) Sulla sbarra agiscono in ogni situazione ( statica o dinamica) la forza peso mg .
applicata nel centro di massa C e la reazione vincolare di appoggio N , perpendicolare
al piano ed applicata nell’estremo B, e sempre applicata in B la forza di attrito f ,
parallela al piano.
F
y
q
A
N
C
f
f
B
x
mg
a) L’equilibrio della sbarra , nella configurazione in cui f = b , è ottenuto applicando
all’estremo A una forza di modulo pari ad F ; il valore di F dipende dall’angolo
che la direzione della forza forma rispetto alla sbarra o , più convenientemente,
dall’angolo q che la direzione della forza forma rispetto all’orizzontale. I valori
delle forze in gioco sono determinati dalle ECS; dalla prima si ottiene:
N + mg + f + F = 0
che proiettata lungo gli assi orizzontale e verticale fornisce le equazioni:
f – Fcosq = 0
N – mg + Fsinq = 0
f = Fcosq
N = mg – Fsinq
Æ
Æ
(4.1)
(4.2)
La IIECS, scelto come centro di riduzione l’estremo B dell’asta e come verso positivo
quello orario, fornisce l’equazione:
-Flcos(b – q) + mglsinb/2 =0
Æ
F =mgsinb/2cos(b – q)
(4.3)
dove si è tenuto conto che l’angolo fra F e la sbarra è (b – q + p/2). Una prima
condizione sulla direzione della forza la si ottiene imponendo che cos(b – q) > 0:
risulta che deve essere q > - (p/2 – b) = - 60°. Inoltre l’espressione di F mostra che
essa è minima in corrispondenza del massimo valore del cos(q – b) consentito dalla
condizione di equilibrio. Questa richiede che oltre le precedenti equazioni sia
soddisfatta anche la disuguagliaza f < mN che assicura che l’estremo B dell’asta non
scivoli sul piano di appoggio. Sostituendo nella disuguaglianza le espressioni di f ed
N , ricavati dalle eq. (4.1-3), si ottiene la condizione:
tgq > (1/m) – 2ctgb
da cui numericamente, col valore assegnato di m, risulta q > g = .99 rad = 56.93°.
Quindi applicando una forza F in una direzione corrispondente ad un angolo q < g
l’estremo B dell’asta scivola sul piano e non è possibile l’equilibrio qualunque sia il
valore di F . Per angoli maggiori l’equilibrio è possibile ed il valore minimo di F lo si
ottiene in corrispondenza del minimo valore ammissibile dell’argomento del coseno
pari a (g – b) ; con questo valore si ottiene per la minima forza F = 3.3 N.
b) Per studiare il moto della sbarra è necessario fare un’ipotesi sul comportamento
iniziale del punto di appoggio B: infatti può darsi che la forza di attrito sia sufficiente
ad impediare al punto B di scivolare sul piano in una fase iniziale del moto, oppure
no. A priori possono realizzarsi entrambe le possibilità, conviene pertanto fare
l’ipotesi più semplice che inizialmente B non si muova sul piano orizzontale e che
quindi la sbarra ruoti attorno a questo estremo. In queste condizioni il sistema ha un
solo grado di libertà; tenuto conto che la forza di attrito non compie lavoro ( il suo
punto di applicazione B non si sposta) possiamo applicare la conservazione
dell’energia per determinare il moto della sbarra in questa prima fase. . Detto I =
ml2/3 il momento d’inerzia della sbarra rispetto ad un asse passante per B, scelto il
piano orizzontale come livello di riferimento per l’energia potenziale delle forze peso
( V = 0 ) si ha:
Iw2/2 + mglcosf/2 = mgl/2 Æ
w2 = 3g(1 – cosf)/l
(4.4)
E’ a questo punto necessario stabilire se l’ipotesi di partenza, che l’estremo B sia
fermo, è verificata e , in caso affermativo, qual’è l’angolo massimo f = d per cui si ha
il moto considerato. Se B non scivola, siamo in condizioni di attrito statico, e quindi
deve risultare verificata la disuguaglianza f < mN. E’ necessario pertanto
determinare la forza di attrito f e la reazione vincolare N in funzione dell’angolo f e
questo può essere fatto ricorrendo alla IECD:
N + f + mg = maC
Dette ax ed ay le componenti orizzontale e verticale dell’accelerazione aC del centro di
massa C dell’asta si ha quindi:
f = max
N – mg = may
(4.5)
Le componenti dell’accelerazione possono essere espresse e determinate in termini della
velocità angolare w , Eq. (4-4), della accelerazione angolare a che si ottiene
immediatamente derivando l’espressione (4.4) rispetto al tempo:
a = 3gsinf/2l
(4.6)
Analogamente si possono ottenere le componenti dell’accelerazione di C per derivazione
successive, rispetto al tempo, delle sue coordinate:
xC = lsinf/2
yC = lcosf/2
Æ
Æ
vx = wlcosf/2
vy = -wlsinf/2
Æ
Æ
2ax = alcosf – w2lsinf
2ay = -alsinf – w2lcosf
Sostituendo queste espressioni nelle eq. (4.5) insieme con le eq. (4.6) e (4.4) si
ottiene:
f = mgsinf( 9cosf – 6sinf )/4
N = mg(10 –9sin2f –6cosf )/4
Sostituendo queste espressioni nella disuguaglianza ne risulta la condizione:
sinf( 9cosf – 6sinf ) < m(10 –9sin2f –6cosf )
E’ immediato verificare che la condizione è soddisfatta per l’angolo iniziale f ª 0 ;
l’angolo massimo d per cui è soddisfatta la condizione lo si ottiene risolvendo la
disequazione in oggetto e si trova , per il valore assegnato di m, d ª15°. Per angoli
più grandi l’estremo B della sbarra comincia a scivolare sul piano ed il sistema ha a
questo punto due gradi di libertà per cui sono necessarie due equazioni per
determinare il moto del sistema. Le equazioni (4.5) rimangono valide per cui si può
scrivere ancora:
f = max
N – mg = may
con le ulteriori relazioni, derivanti dal fatto che adesso B striscia:
f = mN
2ay = -alsinf – w2lcosf
A queste si deve aggiungere l’equazione fornita dalla IIECD:
-flcosf/2 + Nlsinf/2 = ICa
per la quale si è scelto come centro di riduzione il CM e IC = ml2/12 è il momento
d’inerzia rispetto ad un asse passante per C. Il sistema di equazioni differenziali che si
ottiene risulta di non banale integrazione e si tralascia quindi la soluzione del
medesimo.
5) Le forze agenti sul cilindro sono la forza peso mg e la reazione vincolare di
appoggio del piano inclinato N, perpendicolare ad esso ed applicata nel punto di
contatto C fra il piano e il cilindro; nel caso in cui il piano sia scabro è presente
anche la forza di attrito f applicata in C e parallela ad esso.
a) Se il piano è liscio ( f = 0) le equazioni di moto, fornite dalle ECD , sono:
N + mg = ma
Ia = 0
Dove a è l’accelerazione del centro di massa O del cilindro, a è l’accelerazione angolare,
I = mr2/2 è il momento d’inerzia del cilindro rispetto all’asse passante per O e si è scelto
come centro di riduzione il CM. Queste equazioni ci dicono immediatamente che in
assenza di attrito il cilindro, inizialmente fermo, non acquista velocità angolare e quindi
compie un moto di pura traslazione: esso risulta identico a quello di un grave che scivola
lungo il piano inclinato e quindi è un moto uniformemente accelerato con accelerazione
a = gsinq.
y
N
O
f
C
mg
x
q
b) Nel caso in cui vi sia attrito si ha dalla IECD:
N + mg + f = ma
Questa proiettata lungo gli assi x ed y , parallelo e perpendicolare rispettivamente al
piano inclinato, dà:
mgsinq – f = ma
N – mgcosq = 0
(5.1)
La IIECD , scelto come verso positivo di rotazione quello orario, fornisce adesso
l’equazione:
Ia = fr
(5.2)
Le equazioni ora scritte sono valide per un moto qualsiasi del cilindro sia esso o meno
di puro rotolamento.
Nel caso in cui si abbia un moto di puro rotolamento la velocità del punto C del
cilindro a contatto con il piano è nulla, quindi vale la relazione cinematica v = wr fra
la velocità v di O e la velocità angolare w, e analogamente risulta a = ar ( basta
derivare rispetto al tempo). Inoltre nel caso di puro rotolamento, essendo in
condizioni di attrito statico, deve risultare soddisfatta la disuguaglianza f < mN.
Tenuto conto di quanto ora detto si ottiene dalle precedenti equazioni:
f = aI/r2
a = mgsinq/(m + I/r2)
N = mgcosq
(5.3)
con la condizione:
I tgq < m(I + mr2)
(5.4)
Come si vede quindi il moto lungo il piano risulta essere , anche in questo caso,
uniformemente accelerato con una accelerazione indipendente dal valore del
coefficiente di attrito ma comunque minore di quella di un oggetto che scivola lungo
lo stesso piano inclinato; numericamente risulta a = 3.27 m/s2. Si osserva inoltre che
risultando sempre il momento d’inerzia proporzionale al prodotto mr2, a meno di un
fattore numerico che dipende dalla conformazione dell’oggetto, l’accelerazione è in
effetti indipendente sia dal raggio r che dalla massa m.
Dalla disuguaglianza (5.4), tenuto conto dell’espressione di I si ottiene il minimo
valore m* del coeffieciente di attrito per cui si può avere un moto di puro rotolamento
e risulta m* = tgq/3 = 0.192 .
b) Nel caso in cui il moto non sia di puro rotolamento le equazioni (5.1-2)
sono ancora valide ma non vi è più nessuna relazione fra le velocità (o le
accelerazioni) angolare e del CM. Tuttavia , essendo adesso la velocità del
punto C diversa da zero, la forza di attrito f è determinata dalla relazione:
f = mN = mmgcosq
Si ottiene allora dalle suddette equazioni:
a = g(sinq – mcosq )
a = mmgrcosq/I
Essendo l’accelerazione angolare e l’accelerazione del CM costanti i moti corrispondenti
risultano essere uniformemente accelerati e per l’andamento delle velocità nel tempo si
ha:
v = at
w = at
La velocità del punto C, di contatto del cilindro col piano, è data dalla relazione:
vC = v - wr = (a – ar )t = gt[sinq – mcosq(1 + mr2/I)] > 0
In questa relazione l’ultima disuguaglianza deriva dall’essere m = m*/2 e comunque
minore del valore minimo del coefficiente di attrito per cui si può avere un moto di puro
rotolamento. Questa relazione stabilisce che se il cilindro inizialmente striscia sul piano
esso continuerà a farlo anche negli istanti successivi e quindi non si instaurerà mai un
moto di puro rotolamento.
c) Le precedenti equazioni rimangono valide qualunque sia l’oggetto che
rotola lungo il piano inclinato. In ogni caso questi descrivono un moto
uniformemente accelerato con una accelerazione data dalla eq. (5.3) salvo
il fatto che saranno diversi i momenti d’inerzia dei vari corpi. Anche la
condizione di puro rotolamento, espressa dalla disuguaglianza (5.4),
rimane formalmente invariata ma cambia il valore limite del coefficiente
di attrito in conseguenza del diverso valore assunto dai momenti d’inerzia.
In particolare per i casi considerati si hanno i momenti d’inerzia, i valori
limite di m e le accelerazioni riassunte nel seguente quadro:
Tubo cilindrico
I = mr2
a = gsinq/2
m > tgq/2 = 3m*/2
Cilindro pieno
I = mr2/2
a = 2gsinq/3
m > tgq/3 = m*
Sfera piena
I = 2mr2/5
a = 5gsinq/7
m > 2tgq/7 = 6m*/7
Dalla precedente tabella emergono varie considerazioni. Innanzitutto risulta che
l’accelerazione dei vari oggetti è tanto più grande quanto più piccolo è il momento
d’inerzia; quindi facendo partire insieme i tre oggetti , dalla stessa quota e con velocità
nulla, l’ordine di arrivo è determinato dal valore dell’accelerazione e la sfera arriverà per
prima al fondo del piano inclinato. Per quanto riguarda la condizione di puro rotolamento
risulta che con un coefficiente di attrito m = 2m* essa è soddisfatta per tutti gli oggetti, ma
che comunque essa è tanto più stringente quanto più piccolo è il momento d’inerzia;
quindi per un dato piano inclinato per realizzare la condizione di puro rotolamento
occorre un attrito più elevato per il tubo rispetto al cilindro o alla sfera. Risulta inoltre che
anche il valore limite di m è indipendente dal raggio e dalla massa degli oggetti.
[N.B. 1 - Il rotolamento di un oggetto su una superficie richiede sempre la presenza di
attrito; solo in casi particolari potrà risultare la forza di attrito nulla, ma unicamente
come risultato delle equazioni di moto ( es. un oggetto, non soggetto a forze lungo
l’orizzontale, che rotola senza strisciare su un piano orizzontale; caso limite delle
precedenti equazioni con q = 0 ).
N.B. 2 – La condizione di puro rotolamento è sempre e unicamente espressa dalla
condizione che sia nulla la velocità del punto dell’oggetto a contatto con la superficie su
cui si muove.
N.B. 3 – Nel caso di puro rotolamento la forza di attrito non compie lavoro dato che è
nullo lo spostamento infinitesimo, nel tempo dt, del suo punto di applicazione. Questo
come conseguenza del fatto che è nulla la velocità del punto di contatto con la superficie.
Quindi ad un corpo che rotola senza strisciare e soggetto a forze conservative è
applicabile il principio di conservazione dell’energia. Il moto considerato nell’esercizio
poteva quindi essere studiato scrivendo la conservazione dell’energia. ]
6) Le forze agenti sul cilindro sono la forza peso mg , applicata in B , la reazione
vincolare di appoggio N , applicata nel punto di contatto C fra il cilindro e il
supporto e diretta radialmente lungo OC, e la forza di attrito f sempre applicata in
C e diretta tangenzialmente al supporto.
O
q
f
N
C
mg
a) Nell’ipotesi che il cilindro rotoli senza strisciare la forza di attrito f non compie lavoro
e pertanto per determinare il moto del sistema possiamo utilizzare la conservazione
dell’energia essendo le alter forze conservative. Indicato con I = mr2/2 il momento
d’inerzia del cilindro rispetto ad un asse passante per il suo centro di massa B, scelto
come livello di riferimento per l’energia potenziale delle forze peso il piano orizzonrale
passsante per O, si ha:
mv2/2 + Iw2/2 - mg(R-r)cosq = - mg(R-r)cosb
(6.1)
dove v è la velocità del centro di massa B del cilindro , w la velocità angolare del cilindro
e (R-r) è la distanza di B dal centro del supporto O. Poichè la posizione del cilindro è
convenientemente individuata dall’angolo q è opportuno scrivere v e w in termini della
velocità angolare W = dq/dt. Tenuto conto che B si muove lungo una circonferenza di
raggio (R-r) e della condizione di puro rotolamento, nonchè del verso positivo di
rotazione (antiorario) si ha:
v = W(R-r)
w = -v/r = -W(R-r)/r
(6.2)
Sostituendo queste relazioni nella eq. (6.1), tenuto conto dell’espressione di I, si ottiene
infine:
W2 = 4g(cosq – cosb )/3(R-r)
(6.3)
Il valore massimo di W lo si ha in corrispondenza di q = 0 , ossia quando B passa per il
punto più basso della traiettoria, e risulta W = 4.68 rad/s e v = 0.82 m/s.
b) Durante un moto di puro rotolamento, essendo la velocità del punto di contatto C
nulla, deve essere soddisfatta la condizione f< N. Per determinare queste due forze e
verificare la condizione è necessario scrivere almeno la IECD. Indicando con a
l’accelerazione del centro di massa B del cilindro si ha:
f + mg + N = ma
da cui proiettando lungo la direzione radiale e tangenziale si hanno le equazioni:
f – mgsinq = mat = mA(R-r)
mgcosq -N = mar = -mW2(R-r)
(6.4)
(6.5)
dove A = dW/dt è l’accelerazione angolare. L’espressione di A può essere ottenuta dalla
IIECD per il cilindro oppure , in questo caso più rapidamente, derivando rispetto al tempo
l’eq. (6.3) e si ha:
d2q/dt2 = A = - 2gsinq/3(R-r)
(6-6)
Sostituendo le espressioni (6.6) e (6.3) nelle eq. (6.4-5) si ottiene infine:
f= mgsinq/3
N = mg( 7cosq – 4cosb )/3
da cui infine
m > sinq/( 7cosq – 4cosb )
Tenuto conto che questa espressione è monotona crescente in q , il massimo lo si ha per q
= b da cui risulta m > 1/3.
c) L’equazione differenziale (6.6) nell’approssimazione di piccoli angoli (sinq ª q) è
quella caratteristica di un moto armonico e quindi si ha immediatamente per il periodo:
T = 2p[3(R-r)/2g]0.5
e numericamente T = 1.03 s.
7) Le forze esterne agenti sul sistema sono le forze peso mg, applicata al centro di massa
G dell’asta, e Mg, applicata al punto P, e la reazione vincolare del perno R applicata in O.
N
O
S
f
P
mg
A
Mg
a) Il periodo T delle piccole oscillazioni del pendolo è ottenuto immediatamente dalla
IIECD; scelto O come centro di riduzione, indicata con I il momento d’inerzia rispetto ad
un asse passante per O si ha:
Ia = (ml2/3 + Mb2)d2f/dt2 = -mglsinf/2 - Mgbsinf ª -g(ml/2 + Mb)f
(7.1)
Da cui :
a = d2f/dt2 = -g[( ml/2 + Mb)/(ml2/3 + Mb2)]f = -W2f
dove W = 2p/T = 3.14 rad/s è la pulsazione. Quindi
W2 = g[(ml/2 + Mb)/(ml2/3 + Mb2)]
Æ
M = ml(3g – 2lW2)/6b(bW2 – g)
Numericamente risulta M = 0.709 kg.
b) Per determinare la reazione vincolare S che agisce sul punto P per mantenerlo fermo
rispetto all’asta è necessario scrivere la sua equazione di moto; tenuto conto che l’unica
forza agente su di esso , oltre la reazione vincolare, è la forza peso si ha:
S + Mg = Ma
Tenuto conto che P si muove lungo una circonferenza di raggio b, proiettando questa
equazione nella direzione parallela all’asta (radiale) e perpendicolare ad essa si ha:
St – Mgsinf = Mat = Mba
Mgcosf - Sr = Mar = -Mw2b
Dove w è la velocità angolare dell’asta e Sr e St sono rispettivamente le componenti
radiale e tangenziale di S. Queste equazioni forniscono ivalori delle componenti della
reazione vincolare in termini di a e w2. L’accelerazione angolare è determinata dalla eq.
(7.1) , la velocità angolare può invece essere determinata dalla conservazione
dell’energia. Scelto come livello di riferimento per l’energia potenziale delle forze peso (
V = 0) il piano orizzontale passante per O si ha:
Iw2/2 – mglcosf/2 – Mgbcosf = 0
w2 = 3g[(ml + 2Mb)/(ml2 + 3Mb2)]cosf
Quindi si ricava per le due componenti:
St = 3Mgsinf(2ml2 – 3mbl)/2(ml2 + 3Mb2)
Sr = Mgcosf(ml2 + 3mlb + 9Mb2)/(ml2 + 3Mb2)
Nel caso in cui la componente della forza diretta lungo l’asta sia fornita dall’attrito deve
risultare verificata la relazione f=Sr< mSt, con m coefficiente di attrito. Dalle
espressioni sopra ricavate risulta immediatamente che per f = 0 si ha St =0 mentre Sr ,
ossia la forza di attrito, conserva un valore finito; sarebbe quindi necessario un
coefficiente di attrito infinitamente grande per mantenere fermo P.
8) Sul rocchetto agiscono sempre la forza peso mg, applicata nel suo centro di massa
O, la rezione vincolare di appoggio N , perpendicolare al piano e applicata nel
punto C del disco a contatto con esso, la forza di attrito f, applicata in C
tangenzialmente al piano, e la forza elastica della molla Fe applicata nel punto più
alto del disco A tangenzialmente ad esso.
y
Fe
N
A
O
F
C
x
f
mg
a) Nella configurazione di equilibrio viene applicata nel centro del rocchetto O una
forza orizzontale F. Per l’equilibrio dovranno essere soddisfatte la due ECDS. Per
la prima si ha:
F + N + mg + f + Fe = 0
Proiettando questa equazione lungo l’asse orizzontale (x) e verticale (y) risulta:
F - Fe – f = 0
N – mg = 0
Dalla IIECS, scelto come centro di riduzione O e come verso positivo di rotazione
quello orario, si ottiene:
fr - Fe r = 0
Æ
f = Fe
Dalle precedenti equazioni, , tenendo conto che in termini dell’allungamento X della
molla si ha Fe = -KXi , con i versore dell’asse x, risulta infine:
F = 2 Fe = 2KX0
F = 1.5 N
b) Quando, rimossa la forza F, il disco inizia un moto di puro rotolamento esso
risulta soggetto a sole forze conservative per cui si potrà determinare l’equazione
di moto ricorrendo alla conservazione dell’energia. Scelto un sistema di
riferimento con l’asse y passante per la posizione di O quando la molla è a riposo
e indicando quindi con x la sua ascissa nella posizione generica, si ha per
l’allungamento della molla X = 2x; questa relazione deriva dalla condizione di
puro rotolamento per cui C risulta essere il centro di istantanea rotazione e di
conseguenza per la velocità del punto A si ha dX/dt = vA = 2rw = 2v dove v è la
velocità del centro di massa O del disco e w è la sua velocità angolare. Pertanto
uno spostamento di O di una quantità x, positiva, si traduce nell’avvolgimento di
un tratto X = 2x del filo sul rocchetto. Indicato con I = mr2/2 il momento d’inerzia
del disco rispetto ad O si ha per la conservazione dell’energia:
mv2/2 + Iw2/2 + K(2x)2/2 = KX02/2
tenendo conto che v = wr (condizione di puro rotolamento) si ricava infine:
v2 = 2K(X02 - 4x2)/3m
(8.1)
L’equazione trovata è quella caratteristica di un moto armonico come si può anche
riconoscere derivando l’eq. (8.1) rispetto al tempo ottenendo
a = d2x/dt2 = - (8K/3m)x
W = (8K/3m)0.5
(8.2)
La prima fase del moto corrisponde quindi a quella che si ha nel primo quarto di
periodo di un moto armonico di pulsazione W; una volta che la molla ha raggiunto la
configurazione di riposo il filo non è più in grado di esercitare alcuna forza sul
rocchetto e quindi questo compirà un moto di puro rotolamento con velocità costante.
Riassumendo, con le condizioni iniziali assegnate si ha:
t < T/4 = p/2W
t > T/4
x = (X0/2)cosWT
x = vt
v = -W(X0/2)sinWt
v = -W(X0/2)
c) Se l’elongazione iniziale della molla è sufficientemente grande la forza di attrito
non è più in grado di cla onsentire un moto di puro rotolamento ossia di far sì che
la velocità di C sia nulla. Perchè questa condizione si realizzi dovrà risultare
durante tutto il moto f < mN. Dobbiamo quindi determinare f ed N ricorrendo
alla IECD e si ha:
N + mg + f + Fe = 0
Proiettando questa equazione lungo l’asse orizzontale (x) e verticale (y) e tenendo
conto dell’eq. risulta:
- Fe – f = ma
N – mg = 0
f = - Fe – ma = 2Kx/3 = KX/3
N = mg
Æ
Æ
Pertanto, essendo la forza di attrito massima in corrispondenza della massima
elongazione della molla XM, deve risultare
f = 2KxM /3 = KXM /3 < mN = mmg
Numericamente risulta : XM < 8.8 cm.
Æ
XM < 3mmg/K
9) Le forze agenti sulla ruota sono la forza peso mg, applicata nel suo centro di massa O,
la rezione vincolare di appoggio N , perpendicolare al piano inclinato e applicata nel
punto C della ruota a contatto con esso, la forza di attrito f, applicata in C
tangenzialmente al piano; oltre a queste va considerata la coppia di forze applicata dal
motore che tuttavia è a risultante nulla e produce solo un momento assiale M.
N
y
O
f
C
x
q
mg
a) Nel caso in cui la ruota si muova , di puro rotolamento, con accelerazione nulla
dalla IECD risulta:
N + mg + f = 0
che proiettata lungo gli assi parallelo e perpendicolare al piano inclinato come in
figura dà:
f – mgsinq = 0
Æ
f = mgsinq
N – mgcosq = 0
Æ
N = mgcosq
Dalla IIECD, scelto come verso positivo di rotazione quello orario e come centro di
riduzione il punto O coincidente col centro di massa e sull’asse di rotazione , risulta
inoltre:
M – fr = 0
Æ
M = fr = mgrsinq
Numericamente si ha quindi M = 5.33 Nm.
b) La potenza fornita dalla coppia M è data da W = Mw , quindi alla velocità
considerata, essendo w = v/r = 50 rad/s, si ha W = 266 W.
La potenza calcolata può anche essere espressa, utilizzando l’espressione di M, come
W = mgvsinq che corrisponde alla variazione di energia potenziale della ruota
prodotta in un secondo ad opera del motore.
c) Nel caso in cui il moto della ruota, pur rimanendo di puro rotolamento, è
accelerato le ECD forniscono le seguenti equazioni:
N + mg + f = ma
M – fr = Ia
Dove a è l’accelerazione del centro di massa O della ruota, a è l’accelerazione angolare e
I = mr2/2 il momento d’inerzia rispetto all’asse passante per O. Proiettando la prima
equazione lungo gli assi x e y si ha :
f – mgsinq = ma
N – mgcosq = 0
Se il moto è di puro rotolamento si ha a = ar e deve risultare sempre soddisfatta la
relazione f< mN. Risolvendo le equazioni si ottiene:
a = ( M – mgrsinq )/(I + mr2)
f = (mrM + mgIsinq )/(I + mr2)
e la condizione:
(mrM + mgIsinq )/(I + mr2) < mmgcosq
da cui infine tenendo conto dell’espressione di I :
M < mgr( 3mcosq – sinq )/2
Numericamente quindi M < 21.24 Nm.
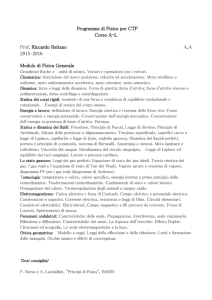
10)
Consideriamo innanzitutto il moto dell’asta AB prima dell’urto: su di essa
agiscono la forza peso Mg, applicata nel suo centro di massa G, e la reazione
vincolare del perno in A. Dato che le forze sono conservative la velocità angolare
dell’asta W0 quando essa raggiunge la posizione verticale, un istante prima
dell’urto, può essere determinate utilizzando la conservazione dell’energia. Detto
I = Ml2/3 il suo momento d’inerzia rispetto all’asse di rotazione in A si ha:
IW02/2 = Mgl/2 Æ
W0 = (Mgl/I)0.5 = (3g/l)0.5
Consideriamo adesso le forze agenti sulla sbarra e sulla sfera durante l’urto.
T
B
R
A
G
-S
Mg
N
B
O
f
C
mg
S
La sbarra applica alla sfera, nel punto di urto B, una forza impulsiva S diretta
perpendicolarmente alle due superfici e quindi, in virtù del terzo principio, sulla sbarra
viene ad agire una forza – S. Sulla sfera agiscono inoltre la forza peso mg, applicata al
centro di massa O, la reazione vincolare N e la forza di attrito f applicate nel punto di
contatto col piano C, che però non hanno carattere impulsivo ( S >> mg, N, f ). Sulla
sbarra oltre la forza –S agisce la forza peso Mg ( S >> Mg) e la reazione vincolare in A
che consta di una componente verticale T e di una componente orizzontale R . Essendo la
sbarra soggetta ad una forza impulsiva orizzontale ed essendo imperniata in A ( essendo
cioè A mantenuto fermo) durante l’urto deve agire su questo punto una forza impulsiva
orizzontale; quindi a priori la componente R avrà anch’essa carattere impulsivo ( R >>
mg , T). Premesso questo si può affermare che durante l’urto le uniche forze rilevanti
sono quelle a carattere impulsivo e precisamente le forze S e –S , interne al sistema sbarra
+ sfera , a la forza R estrena al sistema; tutte le altre forze possono in questa fase essere
trascurate.
a) In conseguenza di quanto ora detto risulta immediatamente che la sfera
immediatamente dopo l’urto non ha velocità angolare. Infatti se consideriamo il
momento, rispetto al centro di massa O, della forza impulsiva S agente su di essa
si vede che esso è nullo e quindi è nulla la variazione di momento angolare.
Essendo la sfera inizialmente ferma risulta nulla la velocità angolare al termine
dell’urto, di conseguenza nel seguito ometteremo per la sfera i contributi relativi
alla sua velocità angolare.
Non essendo il sistema sbarra+sfera isolato, dato che durante l’urto agisce la forza
impulsive esterna R, non valgono in generale la conservazione della quantità di moto e
del momento angolare. Tuttavia, se scegliamo come centro di riduzione il perno A ,
risulta che il momento delle forze impulsive, esterne al sistema , rispetto ad esso ( e solo
rispetto ad A) è nullo. Pertanto sarà costante il momento angolare del sistema rispetto ad
A e scriveremo quindi:
IW + mvl = IW0
W0 - W = mvl/I = 3mv/Ml
Æ
(10.1)
dove W è la velocità angolare dell’asta e v la velocità del centro di massa O della sfera
dopo l’urto; nello scrivere questa equazione si è implitamente assunto come verso
positivo di rotazione quello di W0 ( antiorario). Inoltre essendo l’urto completamente
elastico si conserva l’energia cinetica del sistema fra l’inizio e la fine dell’urto; si ha
quindi:
mv2/2 + IW2/2 = IW02/2
Æ
W02 - W2 = mv2/I
(10.2)
Dividendo membro a membro l’ultima equazione (10.2) per l’eq. (10.1) si ottiene
W0 + W = v/l
Risolvendo il sistema di equazioni (10.1) e (10.3) si ricava infine
v = 2MW0l/(M + 3m)
W = W0(M - 3m)/(M + 3m)
(10.3)
Dall’ultima relazione si vede che la velocità angolare dell’asta dopo l’urto sarà positiva o
negativa a seconda che la massa della sfera sia minore o maggiore di M/3, se invece m =
M/3 la sbarra si ferma.
Con i valori numerici assegnati si ha : W0 = 6.48 rad/s , v = 4.0 m/s e W = - 0.72 rad/s.
b) L’impulso J della forza vincolare R può essere ricavato ricorrendo alle ECD o più
precisamente al loro integrale primo che costituisce l’equivalente del teorema
dell’impulso relativo ad un punto materiale. Se indichiamo con J* l’impulso della
forza S agente sulla sfera dall’integrale della prima equazione cardinale scritta per
la sfera e la sbarra si ricava:
J* = mv
J – J* = MV – MV0
Dove v è la velocità del centro di massa della sfera V e V0 le velocità finale ed
iniziale del centro di massa G della sbarra che in modulo valgono rispettivamente V=
Wl/2 e V0= W0l/2. Proiettando queste equazioni lungo la direzione orizzontale si
ricava
J = mv – M(W0 - W)l/2 = - mv/2 = - mMW0l/(M + 3m)
Numericamente si ha J = -2 Ns ; il segno – dell’espressione indica che il verso della
forza impulsiva è in realtà opposto a quello assunto arbitrariamente nella figura.
c) Nel caso in cui l’urto sia completamente anelastico circa le forze valgono le stesse
considerazioni. In questo caso al termine dell’urto la sbarra e la sfera risulteranno
unite in B e si ha quindi a che fare con un corpo di momento d’inerzia I’ , rispetto
ad A, dato da:
I’ = I + [ I0 + m(r2+ l2)] = (m + M/3)l2 + 7mr2/5
dove I0 = 2mr2/5 è il momento d’inerzia della sfera rispetto al suo centro di massa O.
In questo caso la sola conservazione del mometo angolare del sistema rispetto ad A è
sufficiente a determinare la velocità angolare e si ha:
I’W = I W0
Æ
W = W0(I/I’)
Numericamente risulta W = 2.87 rad/s.
d) Nel caso considerato rimangono valide tutte le considerazioni fatte sulle forze ma
non siamo in grado di dire niente a priori sul tipo di urto. Tuttavia, dato che in
questo caso conosciamo la velocità dell’asta dopo l’urto (W = 0 ), la
conservazione del momento angolare rispetto ad A è sufficiente a determinare la
velocità della sfera; si ha infatti:
mlv = IW0
Æ
v = W0I/ml = W0 lM/3m
Per la variazione di energia cinetica DT fra la fine e l’inizio dell’urto si ha:
DT = mv2/2 - IW02/2 = -W02l2(9m2- M2)/18m < 0
Essendovi quindi una diminuzione di energia cinetica l’urto risulta solo parzialmente
elastico.
 Sul blocco 1 agiscono la forza peso m 1g, la reazione vincolare")