Capitolo 3
Forze elementari
3.1 Costituenti della materia
La materia usuale, ed in particolare la quasi totalità degli oggetti di interesse
biologico, è formata da solo tre tipi di costituenti elementari: elettroni,
protoni e neutroni. A livello macroscopico questi costituenti elementari si
manifestano attraverso due sole caratteristiche: la loro massa e la loro
carica elettrica. La unità di misura della prima è il chilogrammo (kg)
quello della seconda il Coulomb (C).
massa (kg)
carica (C)
elettrone
9.10938 10−31
-1.60218 10−19
protone
1.67262 10−27
1.60218 10−19
neutrone
1.67493 10−27
0
Come si vede la massa del protone mp e quella del neutrone mn sono
circa eguali mentre il rapporto tra la massa del protone e quella dell’elettrone
mp /me ' 2000. La carica del neutrone è nulla mentre protone ed elettrone
hanno cariche esattamente opposte. Si osservi che la conoscenza dei valori
dei queste grandezze è molto accurata, come si evince dal numero di cifre
con le quali sono espresse nella tabella. Si tratta in effetti di grandezze la
cui conoscenza quantitativa è tra le più precise dell’intera scienza.
La piccolezza delle masse delle particelle elementari, rispetto alla massa dei corpi dei quali abbiamo esperienza diretta implica che il numero di
particelle elementari in un corpo macroscopico è enorme. La scala è fissata dal numero di Avogadro NA = 6.02214 × 1023 che indica il numero
di particelle che costituiscono una certa porzione di materia. Il numero di
Avogadro serve a confrontare la massa delle sostanze omogenee, ossia costituite da uno stesso tipo di atomi o molecole. Un numero di Avogadro di
una particolare sostanza è detta anche una mole di quella sostanza e la sua
massa è detta anche massa molare che qui indichiamo con la lettera greca
µ e che viene espressa convenzionalmente in grammi. Oggi, si è giunti a
1
2
definire operativamente la mole come il numero di atomi di Carbonio1 che
ha una massa di 12 g. Pertanto si fissa convenzionalmente:
µ12 C = 12 g
Ci si può domandare perché adottare una convenzione quando potremmo,
come per un corpo macroscopico composto di più parti, fare la moltiplicazione della massa del protone per il numero dei protoni per ogni nucleo e
lo stesso per i neutroni e poi moltiplicare per il numero di Avogadro, ossia
per il numero di atomi (nuclei) in una mole. Troveremmo con i dati della
tabella:
(6mp + 6mn ) ∗ NA = 12.09g
ossia una massa più grande di quella riportata, avendo anche trascurato il
piccolo contributo della massa degli elettroni. Questa differenza prende il
nome di difetto di massa ed indica che non è possibile sommare in senso
stretto le masse su scala nucleare in quanto non si tiene conto dei legami che
si stabiliscono tra i nucleoni. In senso approssimato, tuttavia, la coincidenza
tra la somma delle masse dei componenti elementari citati sopra e la massa
delle molecole che ne sono composte è una forte indicazione di questa visione
unificata della struttura elementare della materia che ha del resto molte altre
conferme.
Consultando la tabella periodica degli elementi si osserva che per ogni
elemento viene riportato il peso atomico. Questo è la massa in grammi di
una mole di un campione naturale dell’elemento. Nella figura si vede che
per il carbonio il numero è circa 12.01. Ciò indica che una mole di carbonio
naturale, che è composta da certe percentuali dei vari isotopi del carbonio,
ha una massa di 12.01 grammi.
Es.1
Verificare che per l’idrogeno il peso atomico indicato nella tabella periodica coincide alla
quarta cifra con la somma della massa di una mole di protoni ed una di elettroni.
Le relazioni fisiche fra questi oggetti elementari, protoni, neutroni ed
elettroni, sono espresse dalle forze reciproche. È sorprendente che esistano,
1
Nella forma isotopica più comune, detta Carbonio-12, in cui il nucleo è composto oltre
che dai 6 protoni caratteristici dell’elemento (numero atomico Z=6), da 6 neutroni
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
3
solo due tipi di relazione, in corrispondenza delle due caratteristiche precedenti, la forza gravitazionale e la forza elettrica (le forze di tipo magnetico
sono legate a quelle di tipo elettrico e saranno analizzate più avanti mentre
quelle di tipo nucleare che sono responsabili, ad esempio, del citato difetto di
massa verranno solo accennate). Le forze gravitazionale ed elettrica hanno
la stessa forma e si scrivono:
Fgrav = −G
m1 m2
2
r12
Fel =
1 q1 q2
2
4π0 r12
Il segno + o - nelle formule precedenti indica una forza repulsiva o attrattiva. r12 è la distanza relativa, quindi entrambe le forze decrescono come il
quadrato della distanza. La forza gravitazionale è sempre attrattiva mentre
quella elettrica è attrattiva fra particelle di carica opposta e repulsiva fra
particelle di carica uguale. In unità SI, le due costanti, G che è detta costante di gravitazione universale e 0 che è detta costante dielettrica
del vuoto valgono:
G = 6.67 10−11
N m2
kg 2
0 = 8.85 10−12
C2
(F/m)
N m2
Una buona regola mnemonica per ricordare la seconda delle due, almeno in
modo approssimato, è ricordare il valore della costante che compare in Fel :
1
' 9 109 m/F
4π0
Per la forza di gravitazione universale si ricordi che la espressione della forza
di attrazione scritta sopra vale in principio per due masse puntiformi. In
effetti, come già dimostrò Newton, la stessa espressione vale per la forza tra
due corpi sferici omogenei di massa m1 ed m2 i cui centri sono a distanza
r12 .
Sulla superficie della Terra un punto materiale di massa m subisce la
forze di attrazione del pianeta. Abbiamo chiamato questa forza peso ed il
suo modulo è stato finora espresso con P = mg in cui il valore d g è in unità
SI, g = 9.81 N/kg. La forza peso è però la stessa forza espressa dalla legge
di gravitazione per cui, approssimando la Terra come una sfera, si ha anche:
P =m
GMT
RT2
da cui ricaviamo l’espressione per g in termini della costante di gravitazione
e della massa MT e del raggio RT della Terra:
g=
GMT
RT2
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
4
Es.2
Conoscendo il valore di g, il raggio (medio) della sfera terrestre RT = 6371 km ed il valore
di G (vedi sopra) si stimi la massa della terra e la si confronti col valore accettato (vedasi, ad es.,
http://en.wikipedia.org/wiki/Earth mass. Sapendo che la massa di Giove è circa 320 volte la
massa della Terra ed il suo raggio circa 11 volte quello della Terra con quale forza (peso gioviano)
una massa di 70 kg viene attratta sulla superficie di Giove?.
Es.3
Assumendo che la densità della Luna sia uguale a quella della Terra e sapendo che il campo
di gravità gLuna è circa 1/6 di quello della Terra si dia una stima del rapporto tra il raggio della
Luna e quello della Terra, approssimate come delle sfere. In effetti, il raggio della luna è poco
più di 1/4 di quello della Terra. Da questo dato si può dedurre se la densità (media) della Luna
è maggiore o minore di quella della Terra. E quanto vale il rapporto tra la densità media della
Luna e quella della Terra?
È cruciale avere chiare due differenze fra le forze precedenti:
• Le forze gravitazionali sono sempre attrattive, mentre quelle elettriche
possono essere sia attrattive che repulsive.
• Le due forze hanno una intensità enormemente diversa. Ad esempio
usando le costanti precedenti, il rapporto fra l’intensità della forza
gravitazionale e di quella elettrostatica fra due protoni a distanza r (il
risultato non dipende da r ):
Gm2p
m2p
Fgrav
2
r
=
= 4π0 G 2 ' 8.09 10−37
2
F el
qp
1 qp
4π0 r2
È quindi chiaro che le forze gravitazionali diventano rilevanti solo quando le forze elettriche sono schermate e per un gran numero di particelle
(pianeti, stelle etc.).
3.2 La nozione di campo di forza
Abbiamo incontrato già la nozione di campo quando abbiamo parlato della
descrizione della variazione spaziale di una grandezza fisica. Si parla di
campo ogni volta che siamo interessati ad una grandezza fisica che assume
valori in una certa regione dello spazio. Ad esempio, si parla di campo
della temperatura di una sbarra se si vuole intendere che per ogni punto
P della sbarra, individuato ad esempio dalla sua distanza x da uno degli
estremi è data la temperatura in quel punto T (x). La temperatura, come
la pressione sono grandezze fisiche scalari e i campi di temperatura e di
pressione sono quindi detti campi scalari. Se considero una grandezza
vettoriale che assume valori nei punti di una certa regione dello spazio ho a
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
5
che fare con un campo vettoriale. Ad ogni punto P è associato il vettore
che descrive la grandezza in esame: avrò dunque una funzione ~v (P ) che ad
ogni punto P associa il vettore ~v .
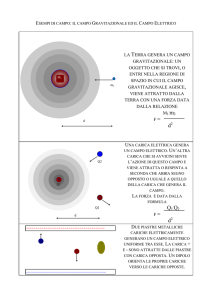
Risulta molto utile trattando di forze elementari introdurre il concetto
di campo di forze. In effetti, è intuitivo che la Terra esercita una forza
gravitazionale su un corpo posto in un punto qualunque, sia vicino alla sua
superficie, sia più lontano sia anche su corpi che si trovano all’interno della
sfera terrestre. Si dice che la Terra origina un campo di forze, il campo
gravitazionale terrestre nei punti dello spazio. Un corpo di massa m posto
in un punto P dello spazio circumterrestre (o anche intraterrestre) risente
di una forza, diretta verso il centro della Terra. Come sappiamo questa
forza è direttamente proporzionale alla massa m del corpo. Possiamo quindi
scrivere la forza come:
F~ (P ) = m~g (P )
Si sono espressamente indicate le grandezze che dipendono dalla posizione
della massa m. Il rapporto tra la forza peso e la massa prende appunto il
nome di campo gravitazionale terrestre ~g (P ).
È utile pensare alla equazione precedente in questi termini: un oggetto
(particella) crea un campo, cioè un potenziale intreccio di relazioni possibili,
un secondo corpo (particella) entrando in questo campo subisce una forza,
che è appunto l’effetto del campo. Il lettore può pensare al campo come alla
ragnatela ed alla sorgente come al ragno.
A causa dei nostri sensi e della particolarità delle interazioni noi vediamo
le particelle ma non vediamo direttamente la ragnatela in condizioni statiche.
In effetti sono le variazioni di queste ragnatele (campi) che sono per noi ben
visibili, e più avanti mostreremo che tali variazioni, per certi intervalli dei
parametri costituiscono le onde radio, la luce visibile etc.
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
6
Campo di una sorgente puntiforme
Consideriamo l’espressione della forza gravitazionale tra un corpo di massa
m1 ed uno di massa m2 , considerati puntiformi o sferici. Possiamo considerare l’influenza gravitazionale del primo sul secondo pensando che m1
è all’origine di un campo gravitazionale che in ogni punto dello spazio, a
distanza r da m1 , è descritto da un vettore diretto verso m1 e di modulo:
g(r) = G
m1
r2
In figura sono mostrate alcuni vettori disegnati nei punti intorno a m1 . Ciascuno di loro rappresenta in direzione modulo (lunghezza) e verso il campo
gravitazionale originato dalla massa m1 che viene detta sorgente del campo.
Seguendo la forma dell’espressione precedente si può dire che il campo
gravitazionale di una massa puntiforme m in un punto P è inversamente
proporzionale al quadrato della distanza di P da m.
Es.4
Di quanto diminuisce il campo gravitazionale di una massa puntiforme se raddoppio la
distanza da essa del punto nella quale lo misuro? E se quadruplico la distanza?
Se in un punto P del campo generato dalla massa m1 pongo una massa
m2 essa risente di una forza che è il prodotto di m2 (una grandezza scalare)
per il campo gravitazionale (una grandezza vettoriale). In modulo se il punto
d è a distanza d dalla sorgente del campo:
m1
d2
espressione che già conoscevamo. La cosa interessante è che questo tipo di
procedura vale ogni volta che in una certa regione dello spazio ci sia un
campo gravitazionale ~g (P ) che sia prodotto da una sorgente in ogni modo
complessa. La forza che una massa puntiforme m posta nel punto P sente
vale:
F~ = m~g (P )
F = m2 g(d) = m2 G
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
7
Da un altro punto di vista, ciò fornisce un metodo di misura del campo
gravitazionale in un punto qualunque dello spazio. Si mette in quel punto
una particella di massa m, si misura la forza cui è sottoposta (si pesa la
particella). La divisione tra la forza misurata e la massa della particella dà
il campo gravitazionale in quel punto.
È intuitivo, data la forma simile della espressione della forza elettrica e di
quella gravitazionale che sia conveniente considerare una carica puntiforme
q1 come la sorgente di un campo elettrico nei punti dello spazio. Il campo
in un punto P ha intensità proporzionale alla carica q1 ed inversamente
proporzionale al quadrato della di P dalla sorgente. Volendo che la forza
elettrica su una carica q2 sia semplicemente il prodotto di q2 per il campo
elettrico F = q2 E vale:
1 q1
E=
4π0 r2
Si osservi che con questa definizione il campo elettrico in un punto può essere
definito come la forza che una carica unitaria positiva sente se viene
posta in quel punto2 . Il segno della carica di prova deve essere specificato
perché va notato che, mentre nel caso gravitazionale, il campo è sempre
diretto verso la sorgente (campo attrattivo) il campo elettrico di una carica
puntiforme è uscente, ossia le frecce sono dirette ai punti lontani, di una
carica sorgente positiva. Questo riflette il fatto che tra due cariche positive
la forza è repulsiva ed è attrattiva tra una carica negativa ed una positiva.
Additività dei campi
Ciò che rende cosı̀ utile il concetto di campo è l’additività. Per essere espliciti parliamo qui di seguito del campo elettrico, ma le stesse considerazioni
valgono per il campo gravitazionale.
Consideriamo tante sorgenti, ad esempio N cariche puntiformi disposte
in modo qualsiasi. Ogni carica, considerata singolarmente in assenza delle
~ i . Quello che si verifica è che la presenza contemaltre, crea un campo E
poranea delle cariche crea un campo totale uguale alla somma dei singoli
campi:
~ =E
~1 + E
~ 2 + ...E
~N
E
Poichè conosciamo il campo generato da una singola particella, il compito di calcolare il campo generato da un insieme di particelle è semplicemente
2
Si faccia attenzione che con questa definizione operativa di campo gravitazionale od
elettrico come la forza che una certa massa o carica subisce quando è posta in un certo
punto dello spazio, assumiamo che la presenza di questa massa o carica di prova non
influenzi significativamente la posizione delle sorgenti del campo e quindi il campo stesso.
In una operazione di misura concreta questa assunzione dovrà essere controllata e la
procedura è tanto più attendibile quanto più piccola è la massa (carica) della particella di
prova.
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
8
una questione di pazienza, o di abilità e/o velocità a fare le somme. Questo programma è basato sull’idea che, qualunque sia la distribuzione nello
spazio delle sorgenti di un determinato campo, ad esempio la massa all’interno del volume di un pianeta non omogeneo e di forma complicata, si può
suddividere questo insieme di sorgenti in porzioni piccole a piacere, trattare
ciascuna di queste piccole parti (particelle) come sorgenti puntiformi e sommare i campi di tutte le piccole parti. In alcuni casi questa operazione non
è strettamente necessaria in quanto è possibile con buona approssimazione
valutare il campo elettrico o gravitazionale. Citiamo due casi:
• Un risultato abbastanza intuitivo ma che si può dimostrare rigorosamente è il seguente: se guardo un insieme di sorgenti da lontano, cioè
se si considerano delle sorgenti a distanza r d, dove d l’ordine di
grandezza della dimensione della zona con sorgenti, allora il campo è
molto ben approssimato da quello di una sorgente puntiforme, posta
nella regione delle cariche, con massa (o carica) uguale alla somma
delle masse, o cariche. Ad esempio a grande3 distanza r da un qualunque sistema tipo pianeta, asteroide, stella etc. con massa totale M
il campo gravitazionale generato da questa sorgente è
g(r) = G
M
r2
Allo stesso modo un insieme di sorgenti con una carica netta Q provoca
a grande distanza approssimativamente un campo:
E=
1 Q
4π0 r2
• Un altro risultato, valido letteralmente, che qui diamo per buono senza
dimostrazione è il seguente: se si ha una distribuzione di carica (o di
massa) sferica, allora il campo a distanza r dal centro è identico a
quello generato dalla massa (o carica) che presente fino ad r, come
se questa fosse concentrata nell’origine. In formule se indichiamo con
M (r) la massa del corpo fino ad r ovvero con Q(r) la carica fino ad r,
allora:
g(r) = G
M (r)
r2
E=
1 Q(r)
4π0 r2
3
(2.1)
Insistiamo sul fatto che se la distanza è grande non è importante distinguere da quale
punto dell’insieme di sorgenti viene misurata.
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
9
Esempio svolto: campo gravitazionale dentro la Terra
Illustriamo l’ultimo risultato calcolando il modulo del campo gravitazionale
all’interno della Terra, a distanza x dal centro, assumendo la Terra come
una sfera di raggio RT e massa totale MT . Per semplicità assumiamo che
internamente la Terra sia omogenea, anche se il risultato che vogliamo illustrare può essere esteso al caso in cui la densità dipende solo dalla distanza
dal centro. Chiamiamo dunque ρT la densità della Terra. La massa che
si trova ad una distanza fino ad x è data dal prodotto della densità per il
volume della sfera concentrica alla terra e di raggio x:
4
M (x) = ρT πx3
3
D’altra parte la densità si ricava dal rapporto tra la massa totale ed il volume
totale della sfera terrestre:
MT
ρT =
4 3
πR
3 T
che, sostituita nella precedente fornisce:
M (x) = MT
x3
RT3
Infine per il campo gravitazionale nel punto interno si ricava:
g(x) = G
M (r)
GMT
GMT x
x
=
x=
=g
3
2
2
x
RT
RT
RT RT
(2.2)
Il risultato finale è espresso attraverso il campo di gravità superficiale g il
cui valore è ben noto. Si osservi che per x = 0 il campo gravitazionale
è nullo, come ci aspettiamo per motivi di simmetria. Inoltre esso è, nelle
approssimazioni fatte, direttamente proporzionale alla distanza dal centro.
Si noti che il risultato (2.1) vale anche all’esterno della distribuzione sferica
di sorgenti, di raggio R. Per un punto a distanza x > R la massa (carica)
che si trova a distanza inferiore di x è M (R) (o Q(R)), ossia tutta la massa
(carica). Ritroviamo il risultato ben noto che il campo al di fuori di una
sfera di massa totale M vale:
g(x) =
GMT
x2
ossia decresce come il quadrato della distanza dal centro.
Es.5
Si calcolino le due espressioni per il campo all’interno ed all’esterno della Terra, considerata
sferica nel punto x = RT . Il campo gravitazionale è continuo? Si tracci il grafico del modulo del
campo nell’intervallo x = (0, 3RT ). È continua la derivata rispetto ad x del campo gravitazionale?
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
10
Rappresentazione grafica dei campi vettoriali
Il paradigma della teoria atomica e poi della fisica moderna è che gli oggetti
macroscopici sono il risultato dell’assemblaggio di varie componenti microscopiche (elettroni e nuclei atomici essenzialmente) in strutture via via più
complesse e dei loro campi. Per cosı̀ dire, lo spazio tra una particella e l’altra non è privo di proprietà, ma è costituito dai campi, ad esempio i campi
vettoriali elettrico e gravitazionale, dei quali le particelle sono le sorgenti.
Risulta utile, quindi, una procedura per visualizzare in forma grafica la
presenza di questi campi vettoriali. Una delle possibilità è rappresentarli
scegliendo nello spazio un insieme più o meno fitto di punti e a partire
da ciascuno di essi disegnare una freccia che rappresenta il campo vettoriale avente direzione e verso del campo e lunghezza proporzionale alla sua
intensità.
NOTA BENE: Per un dato campo, es. campo elettrico, l’origine del vettore è dove lo si misura, NON
dove posta la sorgente (cosa senza senso visto che un
dato campo può essere generato da molteplici sorgenti
puntiformi).
Ad esempio il campo gravitazionale generato dal sistema Terra - Luna
potrebbe essere rappresentato grossolanamente dalla seguente figura;
La figura mostra che vicino alla Terra l’influenza della Luna è piccola.
Le frecce che rappresentano il campo nei punti intorno alla Terra sono tutte
della stessa lunghezza e puntano verso il centro della Terra. Se la luna non
ci fosse, il campo gravitazionale prodotto dalla sola massa terrestre avrebbe
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
11
le stesse caratteristiche, diminuendo in modulo all’allontanarsi dal pianeta.
La presenza della Luna modifica il campo gravitazionale totale nella regione
che si trova tra i due corpi celesti. Ogni freccia che è rappresentata in figura
è la somma nel punto da cui parte dei due campi:
~g = ~gterra + ~gluna
Esercizio svolto
Sulla linea congiungente la terra e la luna i campi prodotti dai due corpi
celesti hanno la stessa direzione e verso opposto. Ci domandiamo se esiste
un punto in cui la risultante dei due campi è nulla.
Scegliamo un asse che dal centro della terra, preso come origine O dell’asse, va al centro della luna. I due punti distano in media4 dT L = 380000km.
In un punto P che si trova su questo asse alla distanza generica x dall’origine
il campo gravitazionale terrestre è diretto verso O e quindi ha componente
negativa:
GMT
gterra (P ) = − 2
x
Il campo prodotto dalla massa lunare è diretto verso la luna, ha quindi verso
positivo per la scelta che abbiamo fatto dell’asse, e la sua componente vale:
gluna (P ) =
GML
(dT L − x)2 )
Per l’additività dei campi nel punto P il campo è la somma (vettoriale)
dei due campi. Quindi la condizione di annullamento è che la somme delle
componenti sia nulla:
−
GMT
GML
+
=0
2
x
(dT L − x)2 )
con la condizione che la soluzione sia compresa tra 0 e dT L . Chiamata α
il rapporto tra la Massa della luna e quella della Terra l’equazione sopra si
riscrive:
1
α
=
2
x
(dT L − x)2
ovvero, facendo l’inverso di ambo i membri e moltiplicando per α:
αx2 = (dT L − x)2
4
Durante il moto dei corpi la distanza varia.
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
12
e, estraendo la radice:
√
αx = dT L − x
da cui:
x0 =
dT L
√
1+ α
Numericamente, la massa della Terra è MT = 5.98 1024 kg, quella della Luna
ML = 7.36 1022 kg da cui α = ML /MT ' 0.0123 e, dunque:
x0 =
Es.6
3.83 105 km
√
' 3.45 105 km
1 + 0.0123
La distanza Terra-Sole è circa centocinquanta milioni di chilometri. Sapendo che il rap-
porto tra la massa della Terra e quella del Sole è circa tre milionesimi, a che distanza dal centro
della Terra si trova, sulla congiungente Terra-Sole il punto in cui i due campi si annullano?
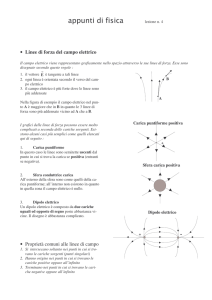
Linee di campo
Un modo alternativo di rappresentare un campo vettoriale è usare le cosiddette linee di campo, ovvero delle curve che sono punto per punto tangenti
alla direzione del campo. Un esempio per un insieme di cariche elettriche
puntiformi di segno alternato è rappresentato in figura.
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
13
Il tracciamento accurato delle linee di campo in una situazione data
anche semplice come è quella di un piccolo numero di cariche è piuttosto
laborioso e non rientra nei limiti di questo corso. Quello che è richiesto è
di sapere leggere un diagramma di linee di campo. In un punto dato del
diagramma il campo vettoriale è tangente alla linea di campo che passa per
quel punto o a quella che si deduce dalla forma delle linee vicine. Si osservi
che le linee di campo non si intersecano mai. Infatti, se si intersecassero
in un punto vorrebbe dire che in quel punto il campo avrebbe due direzioni
diverse, il che non è possibile. L’intensità del campo nelle diverse zone è
generalmente indicata da quanto sono infittite le linee di campo. Dove sono
più fitte l’intensità è proporzionalmente maggiore. Dove sono diradate il
campo è piccolo. Si noti anche che vicino alle cariche puntiformi le linee di
campo diventano radiali ossia sono disposte lungo i raggi che partono dalla
carica. Ovviamente questo dipende dal fatto che vicino alla carica prevale
il campo della singola carica e questo abbiamo visto che ha un andamento
radiale. Per le cariche negative le linee di campo sono entranti5 e per le
cariche positive sono uscenti.
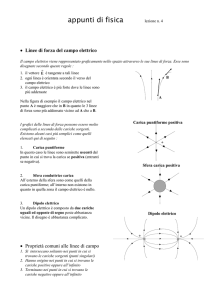
Esercizio: usare la rete
Ci sono, come sappiamo molti modi per usare la rete web. Uno di questi è di
trovare strumenti di approfondimento e di studio. Qui mostriamo una pagina interattiva che consente di visualizzare le linee di campo di un insieme
di cariche elettriche. La pagina è ospitata dal Politecnico della California
(CalTech) all’indirizzo
http://www.its.caltech.edu/ phys1/java/phys1/EField/EField.html
e contiene anche le istruzioni per usarla. Qui diamo brevemente alcuni
suggerimenti facendo riferimento alla figura.
5
Ricordiamo che il verso delle linee di campo è quello della forza che si eserciterebbe
su una carica positiva. Vicino alla carica negativa la forza su una carica positiva è
ovviamente attrattiva.
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
14
I comandi per tracciare le linee di campo sono contenuti nel riquadro
a destra. Cliccando con il cursore posizionato in un punto della finestra
si deposita in quel punto una carica e si ricalcolano le linee di campo con
l’aggiunta dell’ultima carica. Quindi la successione delle operazioni è la
seguente.
1) Si sceglie di tracciare le linee di campo elettrico lasciando marcata solo
la casella denominata Electric Field Lines.
2) Usando il cursore in alto si sceglie il valore (in unità arbitrarie) della
prossima carica da posizionare in un intervallo compreso tra -9 e +9.
3) Si posiziona il cursore nel punto della finestra in cui si vuole posizionare la carica scelta al punto precedente e si invia un clic. La carica
viene posizionata, colaorata di rosso o di blu a seconda che sia negativa e positiva e le dimensioni del pallino che la rappresenta sono
proporzionali alla carica stessa.
4) Appena si rilascia il pulsante del mouse viene collocata la carica e
disegnate le linee del campo elettrico modificate dall’ultima aggiunta.
5) Se si vuole aggiungere altre cariche si ritorna al punto 1. Se si vuole
cancellare il diagramma e ricominciare premere il tasto Reset.
Es.7
Si traccino le linee di campo di una sola carica positiva oppure negativa. Si annoti come
cambia il disegno delle linee di campo all’aumentare del valore della carica. Si mettano vicine
quattro cariche di segno non uguale in modo che la somma delle cariche non sia nulla. Descrivere
le linee di campo tracciate nella zona lontana dal sistema di cariche.
3.3 Dal microscopico al macroscopico e viceversa
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
15
Su scala microscopica le leggi fisiche devono essere riformulate per potere
esser applicate a tutte le situazione sperimentalmente osservabili, anche se
fondamentalmente il tipo di relazioni (forze) è quello indicato. Questo fatto
è ben comprensibile pensando alla struttura del nucleo atomico. Questo è
formato da protoni e neutroni che sono confinati all’interno di uno spazio
le cui dimensioni6 sono dell’ordine di 10−13 cm. I protoni essendo carichi
dello stesso segno risentono secondo la legge di Coulomb di una intensa
forza repulsiva che tenderebbe, se agisse da sola, a smembrare il nucleo.
In effetti la fisica moderna dimostra che esistono forze a corto raggio tra i
componenti del nucleo che sono attrattive e che ne giustificano la stabilità.
Queste forze sono detta appunto forze nucleari e non verranno considerate: i
fenomeni interessanti per la Biologia che vogliamo descrivere in questo corso
avvengono su scale molto più grandi del nucleo atomico, ed in questo regime
le forze nucleari sono del tutto trascurabili.
I nuclei, positivi, attraggono elettroni in modo da neutralizzare l’eccesso
di carica, formando la varietà degli atomi noti in natura. Le dimensioni
tipiche di un atomo sono 10−8 cm, questo dice che un atomo è sostanzialmente uno spazio vuoto, le orbite elettroniche sono 5 ordini di grandezza
più grandi delle dimensioni del nucleo. Se quest’ultimo fosse una pallina di
un millimetro di raggio gli elettroni orbiterebbero ad una distanza di cento
metri.
Come sappiamo, gli atomi si possono aggregare a formare molecole (insiemi di atomi) che sono le unità più piccole di materia che condividono le
medesime caratteristiche chimiche (le interazioni chimiche in ultima analisi
sono interazioni fra molecole).
L’intervallo di scale spaziali che è interessante a livello biologico è enorme, in quanto va dalle molecole semplici (es. acqua) e macromolecole (es.
polipeptidi, grassi, polisaccaridi, etc.) a livello biomolecolare, allo studio di
strutture semi-macroscopiche come la cellula e le sue parti, per finire alla descrizione di veri e propri corpi macroscopici come fibre muscolari, movimenti
di animali, ossa etc.
Anche avendo a disposizione i mattoncini elementari delle interazioni,
essenzialmente le forze elettriche tra le cariche e la forza gravitazionale tra
le masse, è chiaro che non possibile avere un modo efficiente di descrivere
d’un sol colpo tutte queste strutture. La strategia che si usa è quindi duplice:
• Si parte da oggetti noti, o almeno ben descritti, e si cerca di costruire
strutture più complesse. In questo processo si eliminano eventualmente dei dettagli microscopici e si cerca di capire quali sono i parametri
rilevanti per passare da un grado di complessità al successivo. Un
esempio tipico è lo studio delle macromolecole basato su semplifica6
L’esperimento chiave di questa scoperta è l’esperimento di Rutherford di diffusione di
nuclei di Elio su atomi di oro, effettuato da Geiger e Mardsen nel 1909.
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
16
zioni dei loro elementi strutturali, o i modelli del comportamento dei
polimeri etc.
• Si parte da una schematizzazione rozza di uno o più aspetti macroscopici di un problema e si arricchisce via via la descrizione per cercare di
capire comportamenti più particolari, diciamo genericamente dovuti
a scale più piccole. Alcuni esempi di questo secondo approccio li abbiamo già visti, ad esempio abbiamo descritto un corpo macroscopico
all’inizio concentrandoci solo sul centro di massa. Poi abbiamo aggiunto le rotazioni e siamo passati dal modello di corpo puntiforme a
quello di corpo rigido. È chiaro che il passo successivo sarà di affinare
il modello, permettendo la deformabilità del corpo, la disomogeneità
etc.
Il dipolo elettrico
Uno degli esempi più importanti del primo tipo di approccio è dato dal dipolo
elettrico. Questo è una struttura che formiamo a partire dalle cariche libere
ed è la più semplice struttura che possiamo formare che rassomigli ad un
atomo, ossia ad un insieme di cariche globalmente neutro. Sappiamo infatti
che cariche libere opposte tendono ad attrarsi fra loro, vista la grandezza
della forza elettrostatica, quindi è presumibile, e verificato in natura, che le
cariche elettriche elementari possano formare oggetti neutri e stabili. Se due
cariche si dispongono in modo da preservare una simmetria sferica, come
succede approssimativamente fra un nucleo e la nuvola elettronica in un
atomo, allora, per un risultato citato sopra, al di fuori dell’atomo non si
vedono effetti (come se due cariche opposte fossero al centro di una stessa
sfera). Se viceversa, nel processo di schermaggio si formano delle strutture
non completamente simmetriche allora si ha un effetto.
L’esempio più semplice è naturalmente quello di due cariche, +q e −q
poste fra loro a distanza a. Il prodotto qa prende il nome di momento
di dipolo e, dal punto di vista elettrico, può essere pensato in analogia ad
una calamita7 : un polo con la carica positiva ed uno con la carica negativa.
Ovviamente, il dipolo non è indifferente alla sua orientazione. Risulta utile
quindi considerare il momento di dipolo un vettore, rappresentandolo quindi
con una freccia. Il modulo del vettore è d = qa e la direzione e verso sono
dalla carica negativa a quella positiva. Se consideriamo il vettore ~a di modulo
pari alla distanza a tra le cariche e che dalla carica negativa va alla carica
positiva il vettore momento di dipolo può scriversi :
d~ = q~a
7
La fondamentale differenza è che nella calamita non è possibile separare i due poli.
Non esistono le cariche (i cosiddetti monopoli) magnetiche.
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
17
Nel seguito non faremo uso delle proprietà algebriche vettoriali del momento
di dipolo, tuttavia sarà molto utile considerare il dipolo un vettore dal punto
di vista qualitativo. Quando ci sono pid̆ipoli vedremo che l’orientazione
relativa delle frecce è importante sia per valutare l’interazione tra le due
strutture, sia il campo che esse producono quando sono presenti insieme.
Il motivo per cui la nozione di dipolo è cosı̀ importante è duplice:
• Alcuni atomi, gli alogeni ad esempio, sono avidi di elettroni, mentre
altri, come gli alcalini, tendono a perderli facilmente. Se si forma una
molecola allora la carica elettronica tenderà a spostarsi in modo leggermente più marcato verso gli atomi che attirano gli elettroni (gli
elementi più elettronegativi). Questo è il caso, ad esempio, dell’acqua, con l’ossigeno più elettronegativo dell’idrogeno. Siccome in una
molecola d’acqua gli idrogeni non sono disposti in modo simmetrico
questo dà uno sbilanciamento netto di carica ed un dipolo elettrico.
Come vedremo questa proprietà delle molecole d’acqua assolutamente cruciale per la possibilità stessa della vita. In figura si mostra una
rappresentazione pittorica della molecola d’acqua. I legami tra gli atomi di idrogeno e quello di ossigeno formano un angolo per cui le due
cariche positive sono spostate verso gli idrogeni e quelle negative verso
l’ossigeno.
• In un corpo macroscopico qualunque sbilanciamento di posizione fra
cariche positive e negative provoca un dipolo. Si dice che il materiale
è polarizzato. Un fenomeno di questo tipo, variabile nel tempo, è
ad esempio alla base dei processi di emissione di onde radio, o di qualunque radiazione elettromagnetica, come la luce, le radiofrequenze, le
microonde etc. Un esempio di questa situazione si ha in un condensatore piano. Quando esso è carico sulle due armature si trova una carica
opposta. Visto da una distanza grande rispetto alle sue dimensioni il
condensatore viene visto come una coppia di cariche opposte separate
dalla distanza tra le armature.
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
18
In sostanza, il dipolo, una struttura di livello immediatamente più complesso delle singole cariche interviene in una varietà di fenomeni la cui descrizione risulta facilitata se viene considerato il dipolo come mattoncino
costituente le situazioni più complesse.
Il momento di dipolo elettrico si misura in Coulomb × metro, che un’unità di misura poco pratica dato che è alquanto improbabile trovarsi con due
cariche di un Coulomb a distanza di un metro. In fisica e chimica spesso si
usa il debye, in onore del fisico P. Debye, la conversione delle unità di misura
è:
1D = 3.33564 10−30 C m
Valori tipici dei dipoli molecolari permanenti sono 0 - 10 D. Ad esempio
una molecola con un grande momento di dipolo è KBr, con d = 10.5 D.
Esempi per alcune molecole (in debye):
H2 O
1.85
HF
1.91
HCl
1.08
HBr
0.8
HI
0.42
CO
0.12
CO2
0
NH3
1.47
PH3
0.58
CH4
0
NaCl
9
Baricentro delle cariche
Come nel caso della molecola d’acqua le cariche possono raggrupparsi in numero superiore a due. Anche in questo caso nelle strutture con carica totale
nulla, come è la molecola di acqua si può associare alla particolare distribuzione di cariche un momento di dipolo. Assumiamo per semplicità che le
cariche componenti siano puntiformi. La procedura consiste nel considerare
separatamente le cariche positive, di valore totale +Q e quelle negative, di
valore totale −Q. Per ciascun insieme si calcola il baricentro delle cariche, in modo analogo a come si calcolerebbe il baricentro delle masse. Se il
baricentro delle cariche positive e quello delle cariche negative distano della
quantità a si dice che l’insieme di cariche ha momento di dipolo Qa che è
diretto dal baricentro delle cariche negative a quello delle cariche positive.
Nei casi in cui le cariche positive o negative sono distribuite con una certa
simmetria il calcolo dei baricentri si fa senza fare intervenire l’algebra. Ad
esempio, per la molecola dell’acqua essendo le cariche positive uguali il loro
baricentro si trova a metà strada sulla loro congiungente. Il momento di
dipolo, nella molecola rappresentata in figura è, dunque un vettore diretto
sull’asse di simmetria verticale verso il basso.
Es.8
Ai vertici di un quadrato di lato L = 1 µm sono poste due cariche positive +q = 10−15 C e
due cariche negative −q in modo che sui vertici adiacenti ci siano cariche opposte. Dove si trova il
baricentro delle cariche positive? E quello delle cariche negative? Se la struttura ha un momento
di dipolo quanto vale? Se le cariche sono disposte sullo stesso quadrato ma ogni carica ha sui due
vertici vicini una carica opposta e una dello stesso segno, rispondere alle stesse domande.
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
19
Il campo di dipolo
Avendo a disposizione un nuovo giocattolo (il dipolo elettrico), dobbiamo
innanzitutto capire quali siano le sue relazioni. In pratica qual è il campo
elettrico di un dipolo. Sommando i vettori dovuti alla presenza di una carica
positiva ed una negativa si arriva alla figura.
Es.9
Scelto un punto qualunque nella figura che rappresenta il campo del dipolo si mostri che
la freccia che parte da quel punto è il risultato della sovrapposizione dei campi coulombiani delle
due cariche che formano il dipolo.
Es.10
Usando la pagina web citata sopra, si traccino le linee di campo di una coppia di cariche
opposte. Si provino valori crescenti delle due cariche e orientazioni diverse e si descriva ciò che
compare sul diagramma delle linee. Tracciare anche le linee di una coppia di cariche uguali. Cosa
accade alle linee a grande distanza dalla coppia di cariche?
Vogliamo innanzitutto valutare il comportamento del campo di dipolo a
distanze grandi rispetto alla separazione delle cariche. In effetti ai fini della
comprensione del ruolo dei dipoli elettrici nella determinazione della forza
tra i corpi macroscopici questa è l’unica zona in cui ha interesse la cosa: se
la distanza dal dipolo è troppo piccola, dell’ordine della separazione delle
cariche, altri effetti microscopici possono entrare in gioco.
In un dipolo la carica totale è nulla, quindi segue, da una proprietà che
abbiamo citato sopra, che a grandi distanze il campo non può decrescere
come 1/r2 , ma deve decrescere più rapidamente: i due termini tipo 1/r2
delle singole cariche si cancellano a vicenda. D’altronde se le due cariche
fossero sovrapposte esattamente (a = 0) non si avrebbero proprio cariche né
campo. Inoltre, il campo, per la proprietà dell’additività, deve anche essere
porporzionale alla carica sorgente. Infatti, se raddoppio le cariche è come se
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
20
avessi la somma di due campi uguali e quindi il doppio del campo in ogni
punto. Quindi, è ragionevole assumere che il campo essendo proporzionale
sia ad a che a q debba essere proporzionale al prodotto qa, cioè al momento
di dipolo d. Poi ogni carica elementare produce un campo proporzionale
alla costante k = 1/4π0 e questa comparirà quindi come fattore anche nel
campo del dipolo. Come sappiamo nell’espressione del campo elettrico la
costante moltiplica una carica divisa per una distanza al quadrato. Siccome
nel dipolo abbiamo già la proporzionalità per il momento di dipolo ossia
per una carica moltiplicato una distanza, per avere alla fine le dimensioni
giuste occorre dividere per una distanza al cubo. Senza fare alcun calcolo
concludiamo quindi che la dipendenza del campo dalla distanza r del punto
in cui lo si calcola rispetto alla posizione del dipolo deve, per sole ragioni
dimensionali essere del tipo:
E∝k
d
r3
(3.3)
Calcolo esplicito del campo sull’asse di un dipolo
Per confermare la dipendenza del campo di dipolo dall’inverso del cubo
della distanza consideriamo due cariche puntiforme opposte di modulo q a
distanza a. Orientiamo l’asse z nella direzione dell’asse del dipolo e con il
~ ovvero dalla carica negativa a
verso concorde con il momento di dipolo d,
quella positiva e poniamo l’origine nel centro del dipolo (punto di mezzo
del segmento che unisce le due cariche). La carica positiva si trova dunque
alla coordinata z+ = a/2 e la carica negativa nella posizione individuata
dalla coordinata z− = −a/2. Prendiamo il punto P sull’asse del dipolo di
coordinata z positiva. La sua distanza dalle due cariche vale, rispettivamente
a± = z − z± = z ∓ a/2
Secondo la legge di Coulomb il campo elettrico della carica positiva è
diretto nel verso positivo dell’asse z ed ha modulo:
E+ =
1 q
1
=
2
4π0 a+
4π0
q
a 2
2
e, analogamente, nello stesso punto il campo dovuto alla carica negativa è
diretto nel verso negativo dell’asse e ha componente:
E− = −
Es.11
1
4π0
z−
q
z+
a 2
2
Lo studente dovrebbe convincersi che le due espressioni per i campi sono valide anche
per z negativi pur di invertire il verso delle due componenti.
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
21
Applicare il principio di sovrapposizione significa che il campo totale è
trovato sommando i due campi, tenendo conto del loro verso. Per z positivo:
E = E+ + E− =
q
4π0
1
a 2
z−
2
−
1
a 2
z+
2
È un utile esercizio di algebra calcolare l’espressione tra parentesi e
trovare:
E=
q
4π0
2az
z2
a2
−
4
2
Ricordando ora che siamo interessati a punti a grande distanza rispetto
alle dimensioni del dipolo ossia che hanno z a, si può trascurare il secondo addendo al denominatore rispetto al primo per cui una espressione
approssimata per il campo di dipolo risulta:
E=
1 2d
qa 2
=
3
4π0 z
4π0 z 3
che ha proprio l’andamento atteso: è proporzionale al momento di dipolo
e inversamente proporzionale al cubo della distanza. Per punti che non si
trovino sugli assi di simmetria della figura il calcolo è un poco più complicato
e richiede l’uso dei vettori. In tutti i casi la dipendenza dai parametri è quella
dichiarata.
Forze su un dipolo
Avendo visto il tipo di campo creato dal dipolo, vediamo ora come il dipolo
risponde al campo creato da qualcos’altro. Qui si hanno subito dei comportamenti diversi rispetto a quelli soliti di una carica. Il caso più semplice è
quando il dipolo si trova in un campo uniforme. Si osservi che questa in
genere un’ottima approssimazione per un dipolo microscopico, che è piccolo
rispetto alla rapidità con cui cambia il campo esterno. In un campo uniforme, come quello all’interno di un condensatore piano, una carica subirebbe
una forza quindi un’accelerazione. Il modello di dipolo è una coppia di cariche rigidamente collegate. Si tratta di un esempio semplice di corpo rigido,
come sarebbero due masse collegate da un asta. Nel campo uniforme si han~ sulla carica positiva e −q E
~ la cui risultante
no sul dipolo due forze +q E
è nulla. In base alle leggi della dinamica concludiamo quindi il centro di
massa di un dipolo non accelera in presenza di un campo elettrico uniforme.
Tuttavia, le due forze opposte applicate in punti diversi del dipolo formano una coppia ossia applicano al dipolo un momento torcente che tende
a farlo ruotare. La situazione è rappresentata nella figura dove si vede che
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
22
il momento tende ad allineare il dipolo con il campo elettrico. Quando il
dipolo è allineato col campo elettrico esterno non si ha più momento delle
forze e la posizione è di equilibrio.
Es.12
Lo studente dovrebbe saper dimostrare che tra le due posizioni col dipolo allineato al
campo elettrico quella di equilibrio stabile8 richiede che il vettore momento di dipolo abbia anche
~
lo stesso verso di E.
Dunque è chiaro che se si vuole far muovere il centro di massa di un
dipolo occorre che il campo sia diverso sulle due cariche. Per illustrare
questa situazione assumiamo che il dipolo sia disposto lungo l’asse x, che è
~ diretto nel verso positivo delle x,
anche la direzione del campo elettrico E,
ma la cui intensità dipende da x (E = E(x)). La situazione per un campo
crescente nel verso positivo delle x è rappresentata in figura.
8
L’equilibrio è stabile quando sottoposto ad una piccola perturbazione tende a
ripristinarsi.
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
23
La forza totale sul dipolo è:
F = qE(x + a) − qE(x) = q(E(x + a) − E(x))
Se a è piccolo il termine tra parentesi approssima la derivata per l’incremento:
dE
E(x + a) − E(x) '
a
dx
per cui si ha, al primo ordine in a:
F =q
dE
dE
a=d
dx
dx
ossia la forza netta (sul c.m.) per un dipolo proporzionale al gradiente9 di
campo.
Interazione tra dipoli
Il passo seguente è capire come i dipoli possano interagire fra loro, questa se
vogliamo è la rete di comunicazione ad un livello di struttura “più elevato”
rispetto alle singole cariche. Per dipoli distanti fra loro possiamo dire che
l’influenza che il dipolo d1 esercita sul dipolo d2 si manifesta attraverso il
campo elettrico E1 che il primo crea nella posizione del secondo. In prima
approssimazione, come visto sopra, il campo tende ad allineare il secondo
dipolo. Come forza netta invece questa é proporzionale a d2 per il gradiente
(derivata) di E1 . Senza entrare nei dettagli del calcolo possiamo fare la
derivata rispetto ad r dell’espressione (3.3):
9
Ricordiamo che il gradiente per un campo che varia in una sola direzione coincide
con la derivata spaziale. In generale il gradiente è la direzione di massima crescita di un
campo scalare.
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
24
dE1
d1 d2
(3.4)
∼k 4
dr
r
dove k è dell’ordine di grandezza di ke = 1/(4π0 nel sistema SI. La forza
tra i dipoli decresce molto più rapidamente di quella tra cariche libere, ma
l’intensità della forza elettrica rende questa forza ancora enorme su scala
molecolare. In effetti, però, la forza tra dipoli elettrici non è quella direttamente responsabile di ciò che abbiamo chiamato forza di contatto tra i corpi
macroscopici. La ragione di questo possiamo cominciare ad intuirla facendo
un’osservazione basata sull’esperienza quotidiana. L’acqua, come abbiamo
visto è formata da molecole che possono essere approssimate dal punto di
vista elettrico con dei dipoli. Come mai il lettore non ha mai visto due
bicchieri d’acqua attrarsi o respingersi fra loro. Eppure se ogni coppia di
molecole interagisse con una forza del tipo dipolo-dipolo che si sommassero
tra loro, l’enorme numero di molecole di acqua renderebbe la forza assolutamente rilevante. In effetti è ciò che succede nella calamita che, come
vedremo, è sostanzialmente un dipolo (magnetico).
La ragione è che, diversamente da quello che accade nei materiali ferromagnetici dove le interazioni sono molto forti ed il reticolo cristallino fa sı̀
che si creino dei domini di magnetizzazione macroscopici, nell’acqua i singoli
dipoli in realtà sono in continuo movimento e rotazione relativi. Benché a
livello microscopico ci siano delle correlazioni, a livello macroscopico non si
hanno effetti visibili. La situazione è illustrata nella prima delle due figure:
F ∼ d2
Per mettere in evidenza effetti macroscopici di dipoli elettrico si possono
avere due modalità:
• La prima situazione riguarda i materiali formati da molecole che hanno un dipolo elettrico intrinseco, come è il caso dell’acqua. Molecole
di questo tipo sono anche dette polari. Come abbiamo osservato,
per effetto della agitazione termica i dipoli molecolari cambiano continuamente orientazione e l’effetto medio di ciascun dipolo nel tempo
o dell’insieme di molti dipoli disorientati in un istante è nullo. Se
però il sistema è immerso in un campo esterno, in questo caso come descritto precedentemente i dipoli tendono ad allinearsi e, almeno
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
25
parzialmente, riescono a vincere la tendenza al caos indotta dai movimenti molecolari, come mostrato nella seconda delle figure precedenti.
L’effetto chiaramente dipende dalla temperatura ed il dipolo osservato
(medio) dipende dall’intensità del campo elettrico esterno. In prima
approssimazione:
d = αE
(3.5)
ed α è detta polarizzabilità elettrica del materiale.
Es.13
Quali dimensioni deve avere la polarizzabilità α perché la relazione precedente sia
dimensionalmente corretta?
• C’è un secondo meccanismo più sottile che può dar luogo ad un dipolo.
Supponiamo di avere due cariche che si annullano perfettamente, come
succede di norma in un atomo fra nucleo ed elettroni. Se poniamo il
sistema in un campo elettrico esterno le cariche positive e quelle negative sono spinte in direzione opposta e si allontaneranno fintantoché
la forza di richiamo che teneva le cariche legate, non bilancia la forza
separatrice del campo esterno (vedi figura)
Anche in questo caso vale la (3.5) ma α non dipende dalla temperatura.
Esercizio svolto: polarizzazione di un atomo
Per illustrare il fenomeno di polarizzazione di una distribuzione di cariche
in un campo elettrico esterno, consideriamo un sistema estremamente semplificato che rappresenta alcune caratteristiche di un atomo. Il sistema è
formato da una carica puntiforme +Q che si trova al centro di una sfera
uniformemente carica di raggio a e carica totale −Q. La carica positiva
può muoversi all’interno della sfera negativa come se fosse immersa in un
fluido mentre la sfera negativa si considera indeformabile. Come abbiamo
visto a proposito del campo gravitazionale di una distribuzione di massa a
simmetria sferica anche per il campo elettrico all’interno della sfera di carica
negativa il campo elettrico segue un andamento dello stesso tipo:
E(x) =
1 q(x)
4π0 x2
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
26
dove q(x) è la carica contenuta nella sfera di raggio x concentrica alla sfera
di carica data. Se x < a la carica q(x) sta alla carica totale −Q nello stesso
rapporto dei cubi dei raggi x3 /a3 (densità di carica uniforme) per cui il
modulo del campo si scrive:
Eint (x) =
Q x
4π0 a3
La carica positiva al centro della sfera vede un campo nullo (x = 0) e, quindi
non subisce forze, essendo in equilibrio. Per la simmetria della distribuzione
di cariche il baricentro della carica positiva coincide con il suo centro ed il
momento di dipolo è nullo.
Supponiamo ora di applicare un campo elettrico esterno di modulo E0 ,
come nella figura precedente. La carica positiva ora non è più in equilibrio
e tende a spostarsi nel verso del campo elettrico muovendosi rispetto al
centro della sfera. In questo modo inizia a risentire anche del campo della
sfera negativa e le due forze si annullano sotto la condizione:
QE0 − Q
Q x
=0
4π0 a3
da cui si trova la coordinata xE della nuova posizione di equilibrio
xE =
4π0 3
a E0
Q
Dato che la carica positiva è puntiforme questo punto è anche il baricentro
delle cariche positive, mentre l’ipotesi che la sfera esterna fosse indeformabile
comporta che il baricentro delle cariche negative sia nel centro della sfera.
Allora xE è proprio la distanza tra i due baricentri e il campo elettrico
esterno ha indotto un momento di dipolo proporzionale, come prevedeva la
(3.5):
d = QxE = 4π0 a3 E0 = αE0
e il valore della polarizzabilità è qui espresso in termini di una proprietà del
sistema di cariche. Se consideriamo un raggio della sfera negativa dell’ordine
del raggio di un atomo di idrogeno (a = 0.5 10−10 m) si trova:
α ' 10−41 SI
Benché il modello sia estremamente semplificato esso dà risultati che
sono in accordo con l’ordine dei grandezza delle polarizzabilità atomiche.
Es.14
Considerando la situazione dell’esercizio svolto, lo studente verifichi che l’equilibrio della
carica positiva posta nel centro della sfera negativa è stabile.
Es.15
Per quale valore del campo elettrico applicato la posizione di equilibrio della carica posi-
tiva coincide con un punto sul bordo della sfera negativa? Che succede se il campo elettrico viene
fatto crescere a partire da questa situazione?
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
27
Forze di Van der Waals
L’insieme delle considerazioni precedenti spiega un tipo particolare di forza,
molto importante in biologia molecolare ed in altri ambiti. Consideriamo un
sistema senza dipoli permanenti. Per motivi vari, ad esempio fluttuazioni
termiche e o di altro tipo, si può formare un dipolo, chiamiamolo dipolo 1,
d1 . Questo crea un campo elettrico che può indurre, via la (3.5) un dipolo
nella molecola 2, a distanza r di intensità;
d1
r3
Fra questi due dipoli agisce una forza, data dalla (3.4) per cui alla fine si
ha una forza dipolo-dipolo indotto che decresce con la settima potenza della
distanza:
d1 d2
d2
F ∼k 4 ∼k 7
(3.6)
r
r
Questa forza, che decresce in modo relativamente veloce (e si può dimostrare che addirittura decresce come r−8 per distanze sufficientemente grandi) è
detta forza di van der Waals e si dimostra che è attrattiva. Come succede
anche nel caso gravitazionale, il fatto che sia piccola è compensato dal fatto
che essendo sempre attrattiva i suoi contributi si sommano e per il grande
numero di molecole coinvolte in corpi macroscopici si ha una risultante apprezzabile. Un esempio piuttosto eloquente è dato dal geco che, si pensa,
riesce ad aderire con una forza con un valore di decine di volte il suo peso
attraverso le forze di van der Waals fra zampe e parete.
d2 = αE1 ∼ α
Discussione semiquantitativa della forza di aderenza di un geco
Le forze intermolecolari sono alla base della forza di adesione tra due superfici in contatto. Il contatto microscopico tra due superfici è tutt’altro che
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
28
semplice dal punto di vista geometrico. Anche due superfici che ci appaiono macroscopicamente molto lisce come un pezzo di vetro o un foglio di
carta, su scala microscopica presentano rilievi ed avvallamenti irregolari e,
dunque, un certo grado di ruvidità che può essere ridotto solo con lavorazioni meccaniche di alta precisione. Quando due superfici vengono poste in
contatto esse si toccano solo in regioni ristrette e l’area effettiva di contatto
è in genere più piccola della area apparente.
Consideriamo l’ordine di grandezza delle forze di Van der Waals tra
due molecole che si trovano su due superfici in contatto reciproco ad una
distanza di 0.3 nm. Il momento di dipolo delle molecole sia dell’ordine
di d ∼ 1 D = 3.3 10−30 C·m. La costante k che abbiamo indicato nella
espressione (3.6) della forza di van der Waals contiene la costante 1/(4π0 )
al quadrato e la polarizzabilità e, usando gli ordini di grandezza stimati
precedentemente è dell’ordine k ∼ 10−21 SI. Con questi numeri viene una
forza Fd dell’ordine di 10−14 N , quindi estremamente piccola e ben al di là
di ogni effetto macroscopico. Tuttavia se il numero di molecole in contatto
sono molte, le forze, tutte attrattive, si sommano e possono dare un effetto
rivelabile.
Nel geco è l’anatomia del tessuto che riveste la parte inferiore delle zampe
che è all’origine della grande di quantità di molecole che partecipano alla
adesione del geco alle superfici. In effetti il tessuto superficiale è formato da
setole che si separano verso l’estremità in centinaia di spatole di area circa
0.01 µ m2 ' 104 nm2 ciascuna. Se la distanza tra le molecole sulla superficie
della spatola è anche qui dell’ordine di 0.3 nm si hanno circa 105 molecole
sulla superficie della spatola, ciascuna responsabile di una forza dell’ordine
di Fd . Quindi in totale una forza di 1 nN che è dell’ordine di grandezza
giusto.
Non si deve pensare che la stima fatta sopra sia particolarmente realistica. La descrizione quantitativa delle forze di superficie è un soggetto che a
partire dai lavori seminali di Heinrich Hertz alla fine del XIX secolo ha interessato ininterrottamente i ricercatori nei campi della fisica, della chimica
e dell’ingegneria. Quello che ci preme ricavare dalla discussione precedente
è che pur con una serie di dettagli quantitativi incogniti anche il semplice
modello di interazione dipolo-dipolo giustifica l’esistenza di forze su scala
macroscopica.
Per uno studente di un corso di biotecnologie dovrebbe essere interessante
sapere che vi è una rilevante mole di ricerca che ha l’obbiettivo di creare
materiali sintetici che mimino le proprietà delle dita del geco10 .
10
Si veda, ad esempio il recente articolo di un docente del Politecnico di Torino all’indirizzo
http://areeweb.polito.it/ricerca/bionanomech/NP PDF/108-NT08.pdf
e la versione giornalistica della notizia sul quotidiano La Stampa a
http://areeweb.polito.it/ricerca/bionanomech/Pubblicazioni italian/Tuttoscienze-Spiderman05-07.pdf
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
29
3.4 Modelli di forze
Fin qui abbiamo cercato di mostrare che, in ultima analisi, le forze che si
esercitano tra i corpi sono TUTTE il risultato di una miriade di forze elementari di interazione tra particelle. In particolare, le forze di contatto tra
i corpi sono spiegabili come manifestazioni delle forze elettriche tra le particelle cariche presenti nella materia. Queste forze sono molto intense, ma,
per effetto della neutralità elettrica dei corpi macroscopici, composti da atomi e molecole che hanno un egual numero di cariche positive e negative non
si manifestano normalmente a distanza. Al contrario, quando i due corpi
sono a contatto i momenti di dipolo elettrico che sono presenti nel materiale interagiscono con una forza rapidamente decrescente con la distanza e
sono all’origine delle forze macroscopiche. Queste sono apprezzabili perché
risultano dalla somma di un numero elevatissimo di interazioni puntuali.
Questo programma di far scaturire le forze macroscopiche dalla struttura
microscopica dei materiali e dalle interazioni elementari tra le particelle è,
come si capisce, universale, ma di laboriosa attuazione, anche senza tenere
conto di effetti nuovi che sorgono a livello atomico.
Un secondo approccio consiste nel formulare dei modelli di forza che
non sono dedotti da leggi fondamentali, ma che approssimano più o meno
accuratamente situazioni reali. Uno di questi è già stato accennato quando
si è parlato della forza viscosa che una particella subisce quando si muove
all’interno di un fluido. Abbiamo assunto, con considerazioni logiche elementari che per piccole velocità il modulo della forza, che è opposta al moto,
dipendesse proporzionalmente dalla velocità:
Fv = γv
Inoltre abbiamo detto che il coefficiente di proporzionalità dipende dalle
proprietà del fluido (in particolare da una proprietà che descrive le forze di
attrito interne e che prende il nome di viscosità) e dalla forma (per una sfera
il raggio) del corpo mobile. Come si capisce, non è necessario usare leggi
fondamentali per formulare questo modello. Esso però è altrettanto utile
che una legge fondamentale quando si usa nei limiti della sua applicabilità.
Infatti, se il modello è accurato, permette di fare previsioni (ad esempio la
velocità limite di caduta di una sfera in un fluido) che sono confermate dal
comportamento reale. Il progresso della conoscenza in questo campo avviene
non con la scoperta di nuove ed impreviste interazioni elementari, ma attraverso l’esplorazione dei fenomeni in condizioni di non perfetta applicabilità
del modello. In questi casi si procede modificando il modello per tenere
conto di effetti supplementari. Ad esempio per velocità crescenti il modello
lineare della forza viscosa non fornisce più una descrizione compatibile con
le osservazioni sperimentali. Una strada possibile è di mantenere la caratteristica fondamentale del modello ( la forza viscosa cresce con la velocità ed
è nulla per corpi fermi rispetto al fluido), ma modificare la dipendenza dalla
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
30
velocità. Per una sfera che si muove con velocità crescenti la forza viscosa
sarà meglio approssimata da un polinomio di secondo grado:
F = γv + kv 2
Sforzi e deformazioni
Come esempio di questo secondo modo di procedere, aggiungere dettagli ad
un modello semplificato, riconsideriamo il corpo rigido. Dal punto di vista
microscopico, l’idea che possiamo farci di un corpo rigido è ben rappresentata
da un cristallo. Questo è immaginato come un insieme di atomi fissati in
posizioni regolarmente distanziate nello spazio a formare un reticolo regolare.
Un cristallo perfettamente rigido richiede che gli atomi restino inchiodati
alle loro posizioni relative non importa a quale forza sia soggetto il cristallo.
Evidentemente, in Natura i corpi perfettamente rigidi non esistono e se
l’azione delle forze esterne è sufficientemente forte i legami intermolecolari
si possono rompere, le molecole scorrere l’una rispetto all’altra e provocare
una deformazione del corpo. Per parametrizzare questo tipo di cambiamenti,
ossia per formulare un modello che sia espresso tramite un piccolo numero di
parametri (come per il caso della forza viscosa era il coefficiente γ), notiamo
innanzitutto che, come visto precedentemente, l’azione di qualunque forza
esterna avviene attraverso un contatto, e, realisticamente, il contatto non
può essere puntiforme, ma su una superficie. In altre parole la forza effettiva
che conta è quella spalmata su una superficie, come nel caso della pressione.
Sforzi normali
Per concretezza consideriamo una sbarra di lunghezza L e sezione S, e supponiamo che su di essa agisca una forza di trazione, uniforme sulla superficie
trasversa (vedi figura).
La forza specifica, per unità di superficie, è detta sforzo di trazione (stress):
σn =
Fn
S
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
31
L’indice n significa normale e sta a ricordare che lo sforzo impresso perpendicolarmente alla superficie. Questo sforzo provoca sul materiale diversi cambiamenti, ed in particolare un allungamento (strain). Risulta utile
definire l’allungamento relativo (vedi figura).
n =
∆L
L
La ragione per cui si parla di allungamento relativo si può trovare nel caso ideale in cui la forza applicata ad un estremo della sbarra si propaga
inalterata a tutta la lunghezza. È questa una conseguenza del terzo principio. Consideriamo una piccola porzione della sbarra lunga ∆x che inizia
nel punto di applicazione della forza esterna. Quando l’allungamento si è
prodotto (qui ignoriamo il fatto che ciò richiederà un certo tempo caratteristico) la porzione di sbarra è in equilibrio per cui il resto della sbarra sta
imprimendo una forza uguale ed opposta a quella applicata. L’allungamento dL di questo strato di sbarra sia dunque proporzionale alla forza. Per il
terzo principio anche lo straterello di sbarra adiacente è soggetto alla forza
esercitata dal primo che è uguale ed opposta e, quindi identica alla forza
esterna. Anche questo straterello subisce dunque la stessa coppia di forze
e si allunga della stessa quantità. Questo avviene lungo tutta la sbarra e
l’allungamento totale sarà proporzionale al numero di straterelli e, dunque
alla lunghezza L della sbarra. per caratterizzare il materiale si fa il rapporto
tra allungamento e lunghezza totale per trovare una quantità indipendente
dalla lunghezza della sbarra.
In teoria, i modelli microscopici del materiale dovrebbero permettere di
calcolare che relazione c’è fra e σ, σ = f () (ed in alcuni casi lo fanno).
In pratica, si segue una via semi-sperimentale e si misura l’allungamento al
variare di σ. Si ottiene cosı̀ un grafico, detto curva stress-strain caratteristica
di ogni materiale. Ad esempio in figura vengono riportate le curve tipiche
per un materiale duttile come l’acciaio, un acciaio indurito ed un materiale
fragile.
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
32
Il valore dello stress σ corrispondente al punto terminale di ogni curva è
detto carico di rottura del materiale. Il termine inglese è tensile strenght.
Esso indica il valore dello stress, ovvero della forza per unità di superficie
che provoca la rottura del materiale.
Legge di Hooke
Il punto che qui interessa sottolineare che, per piccoli allungamenti, la relazione è lineare, questo regime si chiama regime elastico ed ovviamente
particolarmente semplice da rappresentare e studiare perchè descrive il comportamento del materiale in termini di un solo parametro, la pendenza della
curva. In formule:
σn = En
Il coefficiente E si chiama modulo di Young del materiale, ed è misurato in Pascal come σ, essendo adimensionale (allungamento relativo). La
relazione lineare tra stress e strain prende il nome di legge di Hooke.
La relazione precedente potrebbe essere letta cosı̀: il modulo di Young
è la forza per unità di superficie che è necessario applicare ad una sbarra
di un dato materiale per ottenere un’allungamento relativo unitario (ossia
per ∆L/L =1) che significa un raddoppio della lunghezza. In realtà , la
validità della relazione precedente richiede per la maggior parte dei materiali
che l’allungamento relativo sia piccolo, per cui un suggerimento mnemonico
per valutare la rigidità di un materiale di cui sia noto il modulo di Young
potrebbe essere:
La forza per unità di superficie che provoca un allungamento dell’ uno per mille (1 mm su un metro ad
esempio) è un millesimo del modulo di Young.
Qui di seguito riportiamo E per l’acciaio e per un paio di casi di interesse
biologico. Notiamo che il carico di rottura per compressione o trazione può
essere diverso.
Acciaio
Femore
Noce
E (Pa)
2 1011
1.4 1010
8 109
Tensione max. (Pa)
5 108
8.3 107
4.1 107
Compressione max. (Pa)
1.8 107
5.2 107
Richiamo sulla molla ideale
Lo studente ha incontrato il modello elastico e la legge di Hooke studiando
le molle ideali nei suoi precedenti corsi di studio. Ricordiamo che per molla
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
33
ideale si intende un corpo che si allunga di una quantità x proporzionale alla
forza applicata F . La relazione tra forza ed allungamento si esprime con:
F = kx
e k, misurata in N/m è chiamata costante elastica della molla. Naturalmente, anche qui agisce il terzo principio e la molla esercita sul corpo che applica
la forza F una forza uguale ed opposta. È per questo che normalmente si
esprime tramite:
F = −kx
la forza che la molla esercita ad uno dei suoi estremi, quando è allungata
della quantità x. Il segno meno sta ad indicare che se la molla è allungata la
forza è di trazione e se è compressa la forza che essa esercita è di espansione.
Es.16
Ad una molla di costante elastica k = 22N/m è appesa verticalmente una massa di 350
g. Di quanto si allunga la molla?
Con la discussione precedente si è cercato di mostrare che questo comportamento elastico è caratteristico dei corpi solidi fintantoché vengono sottoposti a forze abbastanza piccole. La relazione della costante elastica con
il coefficiente di Young si ricava da:
σ=
F
∆L
S
= En = E
⇒ F = E x = kx
S
L
L
Risulta quindi che per un dato materiale, caratterizzato da un certo
modulo di Young una molla ha una costante elastica tanto maggiore quanto
più spesso è il filo e quanto più è corto. Un filo lungo e sottile è la forma
migliore in cui mettere in evidenza le proprietà elastiche di un materiale.
Nel prossimo paragrafo esamineremo un caso di interesse biotecnologico.
Esempio: il filo del ragno
In un filo sottoposto a trazione nella regione elastica, la forza di deformazione
per unità di superficie σn è proporzionale alla deformazione, indicata con il
termine che esprime, per un sistema unidimensionale soggetto a forza di
trazione l’allungamento percentuale n rispetto alla condizione di riposo:
σn = En
Si intende qui per carico di rottura lo stress limite σmax al quale il materiale deformato con uno strain max , si rompe. Una definizione alternativa è
quando il materiale cessa di avere una risposta elastica (proporzionale) alle
sollecitazioni meccaniche. Esistono altre definizioni di tensile strength che si
applicano a casi diversi.
Applichiamo queste definizioni alla caratterizzazione delle proprietà meccaniche di un materiale biologico, il filo tessuto dai ragni, che siamo certi
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
34
la biotecnologia amerebbe riuscire a produrre artificialmente con la stessa
efficienza.
Il modulo di Young per la tela di ragno è stato misurato e vale E =
0.2 1010 Pa. Inoltre si osserva che il filo si spezza quando subisce una deformazione di circa il 50 %. Si assuma che la la relazione elastica tra tensione
interna (stress) e deformazione (strain) valga fino a che, all’aumentare della
tensione il materiale si rompe.
Quindi al momento della rottura possiamo dai dati del problema calcolare σmax :
σmax = Emax = 0.2 1010 · 0.5 = 109 P a
Un valore circa doppio di quello dell’acciaio (vedi tabella : tensilestrenght =
5 108 P a). Si tenga conto che il valore trovato rappresenta la forza per unità
di superficie; si deve concludere che un filo d’acciaio di sezione uguale a
quella del filo del ragno è in grado di sorreggere un peso che è circa la metà.
La seta di ragno ha diametri tipici di qualche micron.
Questa straordinaria proprietà ha in effetti interessato i biotecnologi
che si sono dedicati alla ricerca di colture cellulari in grado di produrre
filamenti di seta di proprietà anche migliori di quelle originali. Anche l’inserimento di geni di ragno in mammiferi sembra11 che possa essere sfruttato
per ricavare dal latte dei materiali simili a quelli che formano la tela di ragno.
L’uso in indumenti di protezione o addirittura per catturare gli aeromobili
nemici sono alcuni impieghi ipotizzati per questi nuovi biomateriali.
Es.17
Collegarsi al primo sito citato sopra e leggere il breve articolo. Si è in grado di capire
tutti i termini che sono usati in esso? Annotare eventuali concetti che non risultano chiari.
Sapendo che il modulo di Young dell’acciaio è circa 100 volte maggiore di quello della seta di ragno, possiamo calcolare anche la deformazione
dell’acciaio alla rottura:
max =
σmax
5 108
= 2.5 10−3 = 0.25%
=
Eacciaio
2 1011
come possiamo immaginare dall’esperienza la deformazione di un filo di acciaio prima della rottura è molto piccola rispetto a quella dei fili di una tela
di ragno.
Deformazione trasversale: indice di Poisson
È abbastanza intuitivo che un materiale allungandosi normalmente cambi
anche di sezione. In altre parole se operiamo ad esempio una trazione lungo
11
Notizie in proposito risalgono all’inizio del decennio come si può vedere
in
http://news.bbc.co.uk/2/hi/science/nature/889951.stm.
Altre informazioni sulla tela del ragno si trovano sul web (!), ad esempio a
http://en.wikipedia.org/wiki/Spider web
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
35
l’asse z, allora si deformeranno anche le dimensioni x e y, in modo proporzionale alla deformazione principale (quella lungo z). Questo fenomeno è
stato descritto da Poisson e per un materiale isotropo si traduce, in regime
elastico, nell’introduzione di un indice di Poisson ν nella forma semplificata
seguente. Consideriamo uno sforzo lungo z, si avrà z = σz /E, e deformazioni trasversali lungo y e x. Per un mateiale isotropo, ossia con le stesse
proprietà lungo x e lungo y si avrà per lo stesso sforzo applicato lungo z:
x = y = −νz = −
ν
σz
E
ν è detto modulo di Poisson.
Consideriamo ad esempio un materiale incompressibile ossia tale che
la densità non cambi sotto l’azione di uno sforzo normale e che perciò la
deformazione non modifichi il volume del corpo. Prendiamo per semplicità
un parallelepipedo con gli spigoli lungo i tre assi. Le relazioni precedenti
significano che sotto lo sforzo σz il lato lungo z subisce la deformazione:
∆Lz = z Lz
e, analogamente, le deformazioni dei lati lungo x e lungo y sono:
∆Lx = x Lx = ∆Ly = y Ly
Il volume prima dell’applicazione dello sforzo è:
V0 = Lx Ly Lz
e dopo
V = (Lx +∆Lx )(Ly +∆Ly )(Lz +∆Lz ) ' V0 (1+x +y +z ) = V0 (1+2x +z )
dove si è tenuto conto che x = y per l’isotropia e nello sviluppo delle
parentesi si sono trascurati tutti i termini che hanno un prodotto di almeno
due deformazioni12 .
Allora la condizione che il volume non cambi V = V0 richiede che
1
⇒ x = − z
2
ovvero per questo tipo di materiali l’indice di Poisson è ν = 1/2. Un valore
tipico per l’acciaio 0.3, per l’oro 0.42 etc. Per la gomma circa 0.5: studieremo
più avanti le propriet elastiche della gomma in relazione ad alcuni modelli
di polimeri.
2x + z = 0
12
Questa approssimazione è basata sul fatto che se le deformazioni sono piccole il
prodotto tra due deformazioni è molto piccolo e può trascurarsi.
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
36
Principio di funzionamento di una strain gauge
Il seguente esercizio spiega implicitamente il principio di funzionamento dei
dinamometri elettronici che si usano comunemente in laboratorio e che prendono il nome di strain gauge, termine che letteralmente si traduce come
misuratore di deformazione.
Essi sono costruiti in modo che una resistenza posta internamente sia
sottoposta alla forza esterna da misurare. Assumendo che la resistenza sia
un filo l’esercizio spiega perché la resistenza elettrica cambia e se ne può rivelare la variazione, proporzionale alla forza applicata, sotto forma di segnale
elettrico.
Consideriamo che la resistenza elettrica sia costituita da un sottile filo
di rame di sezione A = 10−2 mm2 e di lunghezza L = 1 m. Sappiamo
dagli studi precedenti che la resistenza di un filo dipende dalle dimensioni
geometriche e dal materiale secondo la relazione:
R=ρ
L
A
Sappiamo che la resistività del rame è ρCu ' 1.7 10−8 Ω m e, dunque per il
filo di rame preso in considerazione:
R = 1.7 10−8 (Ω m)
1m
10−8 m2
= 1.7Ω
.
Se si applica una forza di trazione F = 100N sappiamo che il materiale
è sottoposto ad una tensione sn = F/A e che ciò provoca, se la tensione
non supera il regime di elasticità, una deformazione relativa n che sta nella
seguente relazione di proporzionalità con sn :
sn = En
Conoscendo il modulo di Young ECu = 1011 P a si calcola facilmente:
n =
∆L
sn
F/A
=
=
= 10−7
L
E
E
La deformazione è una quantità adimensionale rappresentando il rapporto
tra due grandezze omogenee: l’allungamento e la lunghezza iniziale. Se
questa è un metro l’allungamento vale
∆L = n L = 0.1µm
una quantità molto piccola.
Per quanto riguarda la sezione del filo, sappiamo che esiste una relazione
di proporzionalità fra la deformazione strain longitudinale e quello trasversale. La relazione coinvolge un parametro, detto indice di Poisson e che
dipende dal materiale, ed è:
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
37
x = −νn
(4.7)
dove il segno − indica che ad un allungamento (n > 0) corrisponde una
riduzione della dimensione trasversale e l’indice di Poisson νCu = 0.34 per il
rame. Come varia, dunque la sezione A? Questa per un filo di sezione circolare si calcola facendo il quadrato del diametro trasversale e moltiplicandolo
per (π/4).
π 2
D
(4.8)
4
Lo studente dovrebbe ricordare che se ho una variazione relativa del
diametro nella relazione precedente la variazione relativa dell’area è:
A=
∆D
∆A
=2
A
D
Ora dalla (4.7) si ricava che
∆A
= 2x = −2νn = −2 × 0.34 n = −0.68 10−7
A
e la variazione della sezione vale:
∆A = −0.68 10−7 A = −0.68 10−9 mm2
che è negativa perché la sezione si riduce. Se misurassimo la resistenza del
filo quando è sotto trazione troveremmo:
L + ∆L
A + ∆A
e raccogliendo al numeratore L e al denominatore A:
L 1 + ∆L/L
1 + n
R1 = ρ
= R0
A 1 + ∆A/A
1 + 2x
R1 = ρ
Sostituendo i valori per gli strain longitudinale e trasversale si trova:
R1 = R0 (1 + 1.68 10−7 )
ovvero la correzione alla resistenza per il filo è di circa un decimo di parti
per milione, molto piccola anche se il fenomeno è stato osservato fino dalla
metà dell’800 (la prima osservazione è attribuita nel 1856 a Lord Kelvin).
Dunque, attraverso una misura elettrica della resistenza, ad esempio
da una misura della tensione ai capi di R quando essa è attraversata da
una corrente fissa I si può risalire alla deformazione e, dunque alla forza
applicata.
Es.18
Un materiale più adatto del rame a realizzare una strain gauge dovrebbe avere una
resistività più grande o più piccola? Uno dei materiali più usati nella tecnologia delle strain gauge
è la costantana. Lo studente faccia una ricerca in rete sulle proprietà della costantana, spiegandone
i vantaggi rispetto al rame.
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011