Parte I – Comunicazioni numeriche in banda base
Comunicazioni Numeriche
in Banda Base
I.1 INTRODUZIONE
Si può stabilire una comunicazione via cavo, fra dispositivi numerici, operando in
banda base, quando le distanze in gioco sono contenute, come nel caso di scambio
dati fra calcolatori afferenti alla stessa LAN (Local Area Network). In tal caso è
possibile evitare la complessità circuitale per realizzare le operazioni di modulazione
e demodulazione, e trasmettere i segnali direttamente in banda base. In generale, la
comunicazione consiste nel trasferimento di simboli appartenenti ad un determinato
alfabeto di sorgente. Questi simboli giungono al ricevitore distorti dal canale e corrotti
dal rumore. Di conseguenza, i simboli ricevuti apparterranno ad un alfabeto di
ricezione che è diverso da quello di sorgente. Nonostante ciò, il sistema deve essere in
grado di trasferire l’informazione emessa dalla sorgente, e quindo la trasmissione dei
dati deve avvenire con determinate specifiche di qualità. In particolare, dovra’ essere
garantita una probabilità di errore non superiore ad un valore prefissato.
Il segnale trasmesso è, in generale, un’onda PAM. La forma dei simboli che
costituiscono il segnale è determinata in base a specifiche esigenze che tengono conto
Parte I – Comunicazioni numeriche in banda base
del contenuto energetico del segnale stesso, della presenza o meno di una componente
continua e della necessità di determinare l’istante ottimo di campionamento di ogni
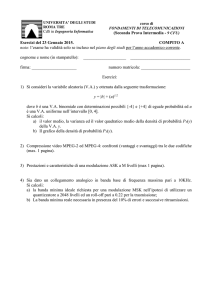
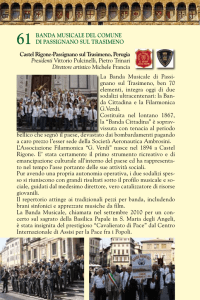
simbolo ricevuto. Alcune possibili forme d’onda sono mostrate in Fig. I.1.1.
I.2 INTERFERENZA INTERSIMBOLO
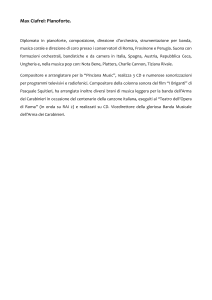
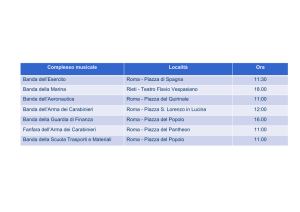
Lo schema a blocchi che sarà preso in esame è quello mostrato in Fig. II.2.1.
ON/OFF RZ
x(t)
2 LIVELLI NRZ
x(t)
…
T
2T
3T
…
t
t
T
ON/OFF NRZ
x(t)
2T
3T
MANCHESTER
x(t)
…
T
2T
3T
…
t
t
T
2 LIVELLI RZ
x(t)
2T
3T
4 LIVELLI NRZ
x(t)
…
…
t
T
2T
3T
t
T
2T
3T
Fig. I.1.1 – Forme d’onda utilizzabili per una trasmissione numerica in banda base
Per fissare le idee, si può considerare, senza perdere di generalità, un’onda trasmessa
di tipo PAM binario a due livelli NRZ come quella mostrata in Figura I.1.1. Il segnale
x(t) può essere indicato come segue:
x(t ) =
∞
∑a
k = −∞
k
p g (t − kTb )
(I.2.1)
dove pg(t) è l’impulso elementare rettangolare di ampiezza ak la cui polarità è
funzione del valore del k-esimo bit da trasmettere, ossia:
Parte I – Comunicazioni numeriche in banda base
a
ak =
−a
se il k-esimo bit è 1
se il k-esimo bit è 0
(I.2.2)
Impulsi
di clock
Generatore
d’impulsi
Dati binari
in ingresso
X(t)
Filtro in
trasmissione
HT(f)
ricostruzione
del clock
Canale
HC(f)
Impulsi
di clock
Dati binari
in uscita
Convertitore
A/D
Y(t)
filtro in
ricezione
HR(f)
+
n(t)
Figura II.2.1 - Sistema di trasmissione dati in banda-base
Il segnale X(t) transita attraverso un filtro sagomatore avente funzione di
trasferimento HT(f), quindi attraverso il canale, che può essere modellato dalla
funzione di trasferimento HC(f), ed infine, attraverso il filtro in ricezione HR(f). A
valle del filtro in ricezione si avrà pertanto:
y( t ) = ∑ Ak pr ( t − td − kTb ) + n0 ( t )
(I.2.3)
k
dove Ak=Kcak, con Kc<1 che modella l’attenuazione del canale, e pr(t-td) è la risposta
del sistema quando in ingresso si ha pg(t).
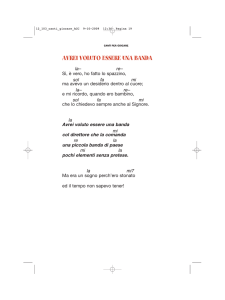
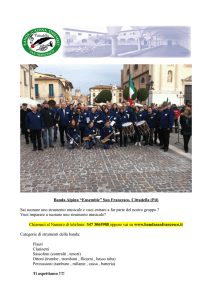
Se non si considera la presenza del rumore in ricezione, la situazione è quella
rappresentata in Fig. I.2.2. In figura è illustrato il segnale ricevuto sovrapponendo le
Parte I – Comunicazioni numeriche in banda base
componenti del segnale ricevuto pr(t) generate dagli impulsi trasmessi pg(t). Dalla
figura si vede chiaramente che la coda del generico simbolo pr(t), causata dalla
limitatezza in banda del canale e dai filtri di trasmissione e di ricezione, interferisce
con la forma d’onda relativa ai simboli trasmessi successivamente al simbolo in
questione. In questo modo, negli istanti di campionamento tale interferenza può
pregiudicare la qualità della stima dei simboli trasmessi. Questo fenomeno si può
modellare matematicamente come segue.
x(t)
t
y(t)
t
Figura I.2.2 – Forma d’onda trasmessa e ricevuta
Il convertitore A/D campiona y(t) negli istanti tm=mTb+td e il bit m-esimo bit è
generato confrontando y(tm) con una certa soglia (che corrisponde allo zero per un
sistema di trasmissione PAM binaria simmetrica). Considerando anche la presenza di
rumore in ricezione, l’ingresso al convertitore A/D negli istanti di campionamento
sarà, quindi:
y (t m ) = Am + ∑ Ak p r [(m − k )Tb ] + n0 (t m )
k ≠m
(I.2.4)
Parte I – Comunicazioni numeriche in banda base
Nella parte destra della relazione (I.1.4) il termine Am rappresenta l’m-esimo bit
trasmesso. Il secondo contributo rappresenta l’effetto sull’m-esimo bit alle code delle
forme d’onda dei simboli trasmessi precentemente. Tale effetto residuo è chiamato
interferenza inter-simbolo (InterSymbol Interference - ISI). L’ultimo termine
rappresenta l’effetto del rumore. E’ evidente come in assenza di rumore e di ISI si
abbia una stima perfetta, dal momento che il valore del campione y(tm)=Kcam è
dovuto unicamente al valore dell’m-esimo bit. Il principale obiettivo, nel progetto di
sistemi PAM, e in genere di tutti i sistemi di trasmissione numerica, è quello di
scegliere filtri in grado di minimizzare gli effetti del rumore e dell’ISI. E’ comunque
inevitabile che nei sistemi reali si avrà sempre una certo valore residuo di ISI, dovuto,
ad esempio, alla imperfetta realizzazione dei filtri, all’incompleta conoscenza delle
caratteristiche del canale o al jitter del clock che determina gli istanti di
campionamento.
I.3 SAGOMATURA DELL’IMPULSO
Dal punto di vista matematico, l’interferenza intersimbolo può essere eliminata
mediante un’opportuna sagomatura della forma dell’impulso ricevuto pr(t).
Osservando ancora l’equazione (I.2.4), si può notare come, per avere ISI nulla, pr(t)
debba soddisfare la seguente condizione:
1
pr ( nTb ) =
0
per n=0
per n ≠ 0
(I.3.1)
E’ importante notare che la condizione (I.3.1) non specifica il valore pr(t) per tutti i
valori di t, ma solo negli istanti di campionamento t=nTb. Si dimostra che, per
soddisfare la condizione (I.3.1), la trasformata di Fourier Pr(f) di pr(t) deve verificare
la seguente semplice condizione:
Parte I – Comunicazioni numeriche in banda base
k
Pr f +
Tb
k =−∞
∞
∑
= Tb
per f < 1 / 2Tb
(I.3.2)
La condizione (I.3.2) per la rimozione dell’ISI è detta criterio di Nyquist per la
sagomatura dell’impulso. Tale relazione fornisce le condizioni per evitare l ‘ISI
usando un impulso pr(t) la cui trasformata di Fourier Pr(f) ha una larghezza di banda
maggiore di rb/2 (rb=1/Tb rappresenta la bit rate); se la larghezza di banda di Pr(f) è
minore di rb/2, l’ISI non può essere eliminata. La Fig. I.3.1 mostra alcune situazioni in
cui è verificata la (I.3.2) e chiarisce quest’ultima affermazione.
Pr(f)
freq. di simbolo pari
alla larghezza di banda
BT
1/2Tb
1/Tb
3/2Tb 2/Tb
5/2Tb
3/Tb
f
freq. di simbolo minore
del doppio della larghezza
di banda
BT 1/Tb
f
caso limite del criterio
di Nyquist:freq. di simbolo
pari al doppio della
larghezza di banda
BT
1/Tb
f
Figura I.3.1 - Rappresentazione grafica del criterio di Nyquist
Nei casi pratici viene usata una classe di impulsi con andamento di Pr(f) a coseno
rialzato; lo spettro Pr(f) è specificato in termini di un parametro α, con 0<α<1, detto
fattore di roll-off:
Parte I – Comunicazioni numeriche in banda base
T
T
π T
1
Pr ( f ) = 1 − s i n
f −
2T
α
2
0
f ≤
1−α
2T
1+α
1-α
≤ f ≤
2T
2T
f ≥
(I.3.3)
1+α
2T
cui corrisponde una pr(t):
pr ( t ) =
s i n( π t / T ) cos( απ t / T )
πt / T
1 − ( 2α t / T )2
(I.3.4)
Nelle Figg. I.3.2 e I.3.3 sono mostrati Pr(f) e pr(t) al variare del parametro α.
Pr(f)
T
α=0.25
α=1
α=0.5
T/2
0
0
1/(2T)
1/T
f
Figura I.3.2 - Spettro dell’impulso a coseno rialzato per diversi valori di α.
Come si evince dalla Fig. I.3.3, qualunque sia il parametro α usato, negli istanti di
campionamento t=nTb è verificata la condizione (I.3.1); tuttavia, si possono fare le
seguenti considerazioni:
• la larghezza di banda occupata dallo spettro dell’impulso è BTs=(1 +α) rb/2;
• all’aumentare del valore di α aumenta la banda richiesta per una prefissato bit-rate;
Parte I – Comunicazioni numeriche in banda base
• all’aumentare del valore di α l’impulso decade più velocemente e le oscillazioni
sono più contenute. Per questo motivo le specifiche sulla sincronizzazione possono
essere meno gravose poiché gli errori nel determinare l’istante ottimo di
campionamento causano una ridotta quantità di ISI;
1
pr(t)
0.8
0.6
α=1
0.4
0.2
α=0.25
0
α=0.5
-0.2
0
T
2T
3T
t
Figura I.3.3 - Risposta all’impulso di un filtro a coseno rialzato per tre valori di α
• la scelta di α=1 ha due proprietà interessanti: l’ampiezza dell’impulso vale 0.5 per
t=Tb/2 e ci sono attraversamenti dello zero per t=(3/2)Tb, (5/2)Tb,... oltre a quelli in
t=Tb, 2Tb, .... Tali proprietà sono molto utili nella ricostruzione del segnale di
temporizzazione per la sincronizzazione del segnale ricevuto.
Parte I – Comunicazioni numeriche in banda base
I.4 PROGETTO DEI FILTRI DI TRASMISSIONE E
RICEZIONE
I filtri di trasmisione e ricezione sono progettati al fine di sagomare gli impulsi
secondo quanto visto nel paragrafo precedente e per minimizzare il rapporto segnalerumore all’ingresso del campionatore in ricezione.
La relazione tra Pg(f) e Pr(f) è la seguente:
Pg ( f )H T ( f )H C ( f )H R ( f ) = K C Pr ( f )e − j 2πft d
(I.4.1)
dove la costante KC ed il ritardo td modellano gli effetti sull’ampiezza e sulla fase
dovuti al canale di comunicazione e ai filtri terminali.
Si assuma che la sagomatura di Pr(f) si tale da evitare l’ISI. L’obiettivo è quello di
progettare i filtri terminali HC(f) e HR(f) in modo tale da minimizzare la probabilità di
errore in ricezione.
Si consideri la trasmissione di un’onda bipolare. Si supponga, inoltre, che i simboli
trasmessi siano equiprobabili.
All’uscita del filtro di ricezione il segnale è inviato a un campionatore. Il valore dei
campioni in generale è affetto dal rumore. Questo valore è confrontato con un valore
di soglia V. Siccome i simboli trasmessi sono di tipo bipolare, il valore della soglia è
posto a zero e, a seconda che l’ampiezza del campione sia positiva o negativa, si
assume che il simbolo trasmesso sia quello corrispondente. Siccome i campioni sono
affetti da rumore, la loro ampiezza è una variabile aleatoria che al generico instente di
campionamneto tk assume la forma
y( tk ) = Ak + n0 ( tk )
(I.4.2)
Parte I – Comunicazioni numeriche in banda base
L’ampiezza del rumore si può modellare come una variabile aleatoria avente una
funzione di densità di probabilità gaussiana:
n2
− 2
1
PN ( n ) =
e 2σ
σ 2π
(I.4.3)
Di conseguenza, l’ampiezza dei campioni y(tk) sarà ancora una variabile aleatoria
gaussiana con valor medio Ak:
PY ( y ) =
1
σ 2π
e
−
( y − Ak )2
2σ 2
(I.4.4)
Tale funzione è mostrata in Fig. I.4.1 per valori sia positivi sia negativi di Ak=A.
PY(y)
-A
A
Y(tk)
Figura I.4.1 – Funzione di densità di probabilità dei campioni affetti da rumore gaussiano
Se si suppone l’equiprobabilità dei simboli, e che questi abbiano la medesima
ampiezza A,
la probabilità di errore non dipende dalla polarità del simbolo
considerato. Siccome si ha un errore quando l’ampiezza del campione oltrepassa la
soglia posta a zero, la probabilità di errore coincide con l’area della coda della
gaussiana oltre tale soglia. Si ha quindi che
∞
Pe = ∫ PY ( y + A ) dy =
0
1
2
∞ − y
2
e 2σ dy
∫
σ 2π A
A
= Q
σ
(I.4.5)
dove la funzione Q(x) è l’integrale della “coda” della funzione gaussiana normalizzata
a partire dal valore x, cioè
Q (α ) =
1
2π
2
∞ −x
e 2
∫
α
dx .
(I.4.6)
Parte I – Comunicazioni numeriche in banda base
Nel caso dell’onda bipolare utilizzata si ha che la potenza ricevuta e uguale ad A2,
quindi la relazione sopra può essere scritta in funzione del rapporto segnale-rumore
SNR all’ingresso del decisore a soglia:
Pe = Q
(
SNR
)
(I.4.7)
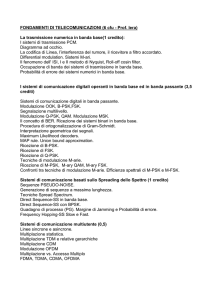
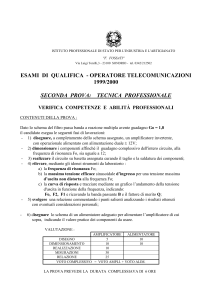
Il grafico di tale funzione è mostrato in Fig. I.4.2
10
10
-2
-4
Pe
10
0
10
10
10
-6
-8
-10
2
4
6
8
10
12
S N R (dB )
Figura I.4.2 – Probabilità di errore per un’onda PAM bipolare in funzione di SNR.
Risulta quindi evidente che per minimizzare la probabilità di errore occorre
massimizzare il rapporto A/σ.
Si ricorda che il segnale trasmesso è del tipo
x(t ) =
∞
∑a
k = −∞
k
p g (t − kTb )
(I.4.8)
con ak=±a. Tale segnale si può considerare come una realizzazione di un processo
aleaorio avente spettro di densità di potenza
Parte I – Comunicazioni numeriche in banda base
a 2 Pg ( f )
Gx ( f ) =
2
.
Tb
(I.4.9)
All’uscita del filtro di trasmissione si ha uno spettro di densità di potenza dato da:
GZ ( f ) = H T ( f ) Gx ( f )
2
(I.4.10)
La potenza media trasmessa è quindi data da
ST =
a2 ∫
∞
−∞
Pg ( f ) H T ( f ) df
2
2
Tb
=
A2 ∫
∞
−∞
Pg ( f ) H T ( f ) df
2
2
(I.4.11)
K C2Tb
Si ha quindi che
−1
∞
2
2
A = K T S A ∫ Pg ( f ) H T ( f ) df .
− ∞
2
2
C b T
2
(I.4.12)
La potenza media di rumore σ2 all’uscita del filtro di ricezione è data da:
∞
σ 2 = ∫ Gn ( f ) H R ( f ) df
2
(I.4.13)
−∞
dove Gn(f) è lo spettro di densità di potenza del rumore, quindi il rapporto (A/σ)2 si
può scrivere come:
−1
2
∞
∞
PR ( f )
A
2
(
)
(
)
T
S
G
f
H
f
df
df
=
b
T
n
R
∫
∫−∞ H ( f ) 2 H ( f ) 2 .
σ2
− ∞
C
R
2
(I.4.14)
Massimizzare il rapporto (A/σ)2 equivale a minimizzare l’espressione
∞
γ = ∫ Gn ( f ) H R ( f ) df ∫
2
2
−∞
PR ( f )
∞
−∞
2
HC ( f ) H R ( f )
2
2
df .
(I.4.15)
La minimizzazione si può far ricorso alla disuguaglianza di Schwarz:
∫
∞
−∞
∞
V ( f ) df ∫ W
2
−∞
*
(f )
2
∞
df ≥ ∫ V ( f )W
−∞
*
( f )df
2
.
(I.4.16)
Ponendo
V ( f ) = H R ( f ) Gn ( f )
(I.4.17)
Parte I – Comunicazioni numeriche in banda base
e
W(f ) =
Pr ( f )
(I.4.18)
HC ( f ) H R ( f )
il valore di γ2 è minimizzato se
HR( f ) =
2
K Pr ( f )
(I.4.19)
H C ( f ) Gn ( f )
dove K è una costante positiva. Sostituendo nell’espressione di partenza si ha che:
HT ( f ) =
2
K C2 Pr ( f ) Gn ( f )
K H C ( f ) Pg ( f )
2
.
(I.4.20)
Per quanto riguarda la fase dei filtri, questa deve essere lineare, in modo tale che lo
sfasamento totale all’uscita del filtro di ricezione sia 2πftd.
In definitiva si ha che il massimo del quadrato del rapporto segnale-rumore è data da:
∞ PR ( f ) 2 Gn ( f )
A2
2 = Tb ST ∫
df
−∞
(
)
H
f
σ
C
max
−2
(I.4.21)
al quale corrisponde una probabilità di errore
A
Pe = Q
σ max
(I.4.22)
Nel caso in cui lo spettro di densità di potenza del rumore sia costante (rumore
bianco) e l’impulso pg(f) sia molto stretto (questo significa che il lobo principale della
trasformata di Fourier è estrememente largo, e pressoché costante nella banda di
interesse), le espresioni sopra si semplificano notevolmente, come segue:
HR( f ) =
2
HT ( f ) =
2
K1 Pr ( f )
(I.4.23)
HC ( f )
K 2 Pr ( f )
HC ( f )
.
(I.4.24)
Parte I – Comunicazioni numeriche in banda base
RIFERIMENTI BIBLIOGRAFICI:
K. Sam Shanmugam: “Digital and Analog Communication Systems”, Wiley.