5
ENERGIA CINETICA
Teorema dell’energia cinetica
Definizione 1 Per un punto P dotato di massa m e velocità v, si definisce energia
cinetica la seguente quantità scalare non negativa
1
T := mv 2 .
2
(1)
Definizione 2 Per un sistema discreto di punti Pi , dotati di massa mi ciascuno
con velocità vi , si definisce energia cinetica la seguente quantità scalare non negativa
N 1
P
(2)
T :=
mi vi2 .
i=1 2
Definizione 3 Dato un sistema continuo, per ogni punto P del sistema, sia ρ (P )
la funzione densità di massa, allora la quantità scalare energia cinetica si definisce
come
R 1
(3)
T :=
ρ (P ) v 2 (P ) dC.
C 2
Definizione 4 Per un punto P dotato di massa m e velocità v, si definisce potenza
della forza F la seguente quantità scalare
π := F × v.
(4)
Consideriamo un sistema materiale costituito da N punti materiali Pi in movimento rispetto ad un osservatore inerziale. Per ogni punto Pi vale l’equazione
fondamentale della dinamica
mi ai = Fi + fi + Φi + φi
i = 1, . . . , N.,
(5)
dove
Fi è il risultante delle forze esterne,
fi è il risultante delle forze interne,
Φi è il risultante delle reazioni vincolari esterne,
φi è il risultante delle reazioni vincolari interne.
Teorema 1 (dell’Energia Cinetica) Consideriamo un sistema materiale costituito da N punti materiali Pi in movimento rispetto ad un osservatore inerziale.
Per ogni punto Pi valga l’equazione fondamentale della dinamica 5 ristretta alle
forze attive interne ed esterne, allora vale la seguente equazione
dT
= Πest. + Πint.
dt
(6)
6
Dimostrazione. Moltiplichiamo scalarmente ciascuna equazione del sistema 5
per la velocità di ogni punto vi . Si ottiene
mi ai × vi = Fi × vi + fi × vi .
(7)
i = 1, . . . , N.
Ma
¸
¸
∙
∙
d 1
d 1
2
mi vi × vi =
mi vi = Fi ×vi +fi ×vi .
mi ai ×vi =
dt 2
dt 2
i = 1, . . . , N. (8)
Si è ricavato dall’equazione fondamentale della dinamica, scritta per un sistema di
N punti, che la potenza delle forze agenti sul singolo punto eguaglia la derivata
della sua energia cinetica rispetto al tempo t. Sommiamo le N equazioni scalari
membro a membro e otteniamo
¸ X
∙
N
N
N
X
X
d 1
dT
2
Fi × vi +
(9)
fi × vi =⇒
mi vi =
= Πest. + Πint. ,
dt
2
dt
i=1
i=1
i=1
dove Πest. è la risultante della potenza delle forze esterne e Πint. è la risultante della
potenza delle forze interne.
Osservazione 1 Mentre le 2 equazioni cardinali della dinamica coinvolgono solo le
forze esterne e i loro momenti, poichè Rint. = 0 e MOint. = 0, il teorema dell’energia
cinetica coinvolge la potenza delle forze interne che, in generale può non essere
nulla.
Esempio 1 Due punti dotati di massa m1 e m2 connessi da una forza elastica
(molla) aventi velocità v1 e v2 .
Osservazione 2 La potenza delle forze interne nel C.R. è nulla
Dimostrazione. Per definizione
Πint. =
N
X
i=1
fi × vi .
(10)
³−−−−→´
nell’atto di moto rigido, possiamo scrivere vi = vO + ω ∧ Pi − O , che sostituita
nella precedente equazione fornisce
Πint. =
N
X
i=1
fi ×vi =
N
X
i=1
N
N
h
³−−−−→´i X
h
³−−−−→´i
X
fi × vO + ω ∧ Pi − O =
fi ×vO +
fi × ω ∧ Pi − O
i=1
= Rint. × vO + ω × MOint. ,
i=1
(11)
ma in un C.R. Rint. = 0 per il principio di azione e reazione e MOint. = 0 per la
stessa ragione.
Osservazione 3 Se il corpo è vincolato con vincolo liscio (esterno al corpo) e
fisso, la potenza della reazione vincolare è nulla. Se il vincolo non è fisso in
generale la potenza è diversa da zero.
7
Osservazione 4 Se il corpo è vincolato con rotolamento senza strisciamento e il
vincolo è fisso, la potenza della reazione vincolare è nulla.
Se il vincolo non è fisso ed è esterno al sistema, la potenza è diversa da zero.
Osservazione 5 Se il vincolo di rotolamento senza strisciamento è interno al
sistema, la potenza delle reazioni vincolari interne è nulla.
Poichè c’è rotolamento senza strisciamento, le velocità dei punti di contatto sono
uguali
(12)
vH = vK
e la potenza delle reazioni vincolari diventa
Π = R0 × vH − R0 × vK = 0.
Si osservi che non è nulla la potenza sul singolo corpo.
(13)
8
Osservazione 6 Se il vincolo è liscio ed è interno al sistema, la potenza delle
reazioni vincolari è nulla.
Infatti le componenti normali delle velocità dei punti di contatto sono uguali
vH,n = vK,n
(14)
e la potenza delle reazioni vincolari diventa
Π = ΦH × vH − ΦK × vK = ΦH vH,n − ΦK vK,n = 0,
(15)
poichè ΦH = ΦK per il P.A.R.
Teorema 2 (di König) L’energia cinetica di un sistema in moto è pari all’energia
cinetica di traslazione del sistema come se tutta la massa fosse concentrata nel baricentro più l’energia cinetica del sistema relativa ad un osservatore traslante con il
baricentro stesso.
Dimostrazione. Consideriamo un sistema di punti Pi , dotati di massa mi ciascuno con velocità vi . L’energia cinetica di questo sistema è pari a
T =
N 1
P
mi vi2 ,
2
i=1
(16)
dove vi è la velocità assoluta. Si consideri un riferimento mobile. Poichè il legame
tra il riferimento mobile e quello assoluto viene espresso da
vi = viS + virel. ,
(17)
dove viS è la velocità di trascinamento e virel. è la velocità relativa. Sostituendo
nell’espressione dell’energia cinetica, otteniamo
h¡ ¢2 ¡
i
N 1
N 1
£¡ S
¢ ¡ S
¢¤ P
¢
P
rel.
rel.
S
rel. 2
S
rel.
T =
mi vi + vi
mi vi + vi
+ 2vi × vi
× vi + vi
=
i=1 2
i=1 2
=
N
N
N
¡ ¢2 1 P
¡
¢2 P
£
¤
1P
mi viS +
mi virel. +
mi viS × virel. .
2 i=1
2 i=1
i=1
(18)
9
Con una scelta opportuna del riferimento mobile si può eliminare il termine misto.
Scegliamo il riferimento mobile con origine nel baricentro G del sistema traslante,
ovvero viS = vG . Allora il termine misto diventa
N
P
i=1
N
N ¡
¡
£
¤ P
£
¤ P
¢
¢
rel.
mi viS × virel. =
mi vG × virel. =
mi virel. ×vG = mi vG
×vG = Qrel. ×vG ,
i=1
i=1
(19)
ma per definizione Qrel. = 0. In definitiva
T =
N
¡
¢2 1 2
1 2
1P
mi virel. + mvG
= Trel. + mvG
.
2 i=1
2
2
(20)
Nel caso particolare del Corpo Rigido, Trel. è l’energia cinetica di un atto di moto rotatorio
attorno al baricentro G. Calcoliamo l’espressione generale dell’energia cinetica per
un atto di moto rotatorio intorno ad O.
h
³−−−−→´i2
h
³−−−−→´i h
³−−−−→´i
R 1
R 1
T =
dC =
ρ (P ) ω ∧ P − O
ρ (P ) ω ∧ P − O × ω ∧ P − O dC
C 2
C 2
(21)
³−−−−→´
−−−−→
Se poniamo a = ω ∧ P − O , b = ω e c = P − O, T diventa
n
h
io
R 1
ρ (P ) a × b ∧ c dC.
C 2
(22)
h
i
a × b ∧ c = b × [c ∧ a]
(23)
h
i
a × b ∧ c è un prodotto misto. Usando le permutazioni cicliche, otteniamo
e l’espressione 21 si può scrivere come
nh³−−−−→´i h
³−−−−→´io
R
1
P −O ∧ ω∧ P −O
dC,
T = ω × ρ (P )
2
C
(24)
ma l’espressione sotto il segno d’integrale corrisponde al momento della quantità
di moto con polo in O, per cui
1
1
T = ω × ΓO = ω × Iω.
2
2
(25)
Usando una terna principale d’inerzia relativa ad O, ΓO diventa
ΓO = (Ixx ωx ) i + (Iyy ω y ) j + (Izz ωz ) k,
(26)
con i, j e k versori della terna principale d’inerzia e l’energia cinetica assume la
forma
i
i h
1h
T =
ω x i + ωy j + ω z k × (Ixx ωx ) i + (Iyy ω y ) j + (Izz ωz ) k
2
10
¤
1£
Ixx ω2x + Iyy ω 2y + Izz ω2z .
2
possiamo riscrivere T in un altro modo. Se
=
ω=
ω
ω = ωu u versore di ω,
ω
(27)
(28)
allora
1
1
T = ω2 (u × Iu) = Iu ω 2 ,
(29)
2
2
dove Iu è il momento d’inerzia rispetto all’asse d’istantanea rotazione u k ω.Quindi
1
T = Iω ω2 .
2
(30)
Per un atto di moto rototraslatorio
1 2 1
+ Iω ω 2 .
T = mvG
2
2
(31)
Osservazione 7 Nel caso del Corpo Rigido, il teorema dell’energia cinetica discende dalle equazioni cardinali
½ d
Q = Rest.
dt
.
(32)
d
Γ = M(G)est.
dt G
Dimostrazione. Moltiplichiamo scalarmente la prima equazione per vG e la seconda per ω
(
d
h dt Q × vG = maG × vG = Rest. ×
i vG
. (33)
d
d
Γ × ω = dt (Ixx ω x ) i + (Iyy ωy ) j + (Izz ω z ) k × ω = M(G)est. × ω
dt G
Sommiamo le due equazioni membro a membro
d
(34)
ΓG × ω = Rest. × vG + M(G)est. × ω = Πest. ,
dt
ma
∙
¸
d
d 1 2
maG × vG + ΓG × ω =
mv
dt
dt 2 G
"
#
¸
∙
di
dj
dk
d 1 2
+ Ixx ω̇ x i + Iyy ω̇ y j + Izz ω̇ z k + Ixx ω x + Iyy ω y + Izz ω z
×ω =
mv
dt
dt
dt
dt 2 G
h
³
´
³
´
³
´i
+ Ixx ω̇ x i + Iyy ω̇y j + Izz ω̇ z k + Ixx ω x ω ∧ i + Iyy ω y ω ∧ j + Izz ωz ω ∧ k ×ω
¸
∙
i
h
d 1 2
=
mv + Ixx ω̇ x ω x + Iyy ω̇ y ωy + Izz ω̇ z ωz + ω ∧ ΓG × ω
dt 2 G
¸
∙
∙
¸
¢
d 1 2
d 1 2 1¡
2
2
2
=
mv +Ixx ω̇x ω x +Iyy ω̇y ω y +Izz ω̇ z ω z =
mv +
Ixx ω x + Iyy ω y + Izz ωz
dt 2 G
dt 2 G 2
maG × vG +
=
d
T = Πest.
dt
(35)
11
Lavoro e Campi conservativi
Partiamo dall’espressione 6 e supponiamo di includere, oltre alle forze attive esterne e interne, anche le forze reattive esterne ed interne. La forma espressa
dall’equazione 6 è nota come prima forma del teorema dell’energia cinetica. Ci
proponiamo, ora di ricavare la seconda forma di tale teorema. Moltiplichiamo
ambo i membri dell’espressione 6 per dt. Si ricava
dT = Πest. dt + Πint. dt + Π0est. dt + Π0int. dt = Πdt,
(36)
dove con Π abbiamo indicato sinteticamente tutti i tipi di forze (attive, reattive,
interne ed esterne). Per definizione di potenza
dT = Πdt = F × vdt = F ×
dP
dt = F × dP = δL,
dt
(37)
dove con δL indichiamo il lavoro elementare compiuto da una forza F (P, v, t) (o
risultante di forze esterne, interne,. . . ) agente su di un punto materiale (o sistema)
in un intervallo di tempo infinitesimo dt. Il lavoro elementare non è un differenziale
esatto. In coordinate cartesiane, il lavoro elementare si può rappresentare come
(38)
δL = Fx dx + Fy dy + Fz dz.
Se integriamo in un intervallo di tempo [t0 , t1 ] la quantità 36, si ottiene il lavoro L
compiuto dalla forza F
Z t1
Z t1
Z t1
dT = ∆T =
Πdt =
δL = L
t0
Z
t0
t0
t1
[Πest. + Πint. + Π0est. + Π0int. ] dt = Lest. + Lint. + L0est. + L0int. .
(39)
t0
L’equazione scalare
∆T = Lest. + Lint. + L0est. + L0int.
(40)
esprime il teorema dell’energia cinetica nella II forma: la variazione di energia cinetica in un qualsiasi intervallo di tempo è uguale alla somma algebrica dei lavori
eseguiti da tutte le forze esterne, interne, attive e reatttive agenti su di un sistema materiale. Consideriamo ora, l’intervallo di tempo [t0 , t1 ] durante il quale il
punto (sistema di punti, corpo rigido, . . . ) passa dalla posizione P0 alla posizione
P1 descrivendo una curva l. Se il punto in un intervallo di tempo dt subisce lo
spostamento dP = v (t) dt, il lavoro compiuto dalla forza F e per definizione
Z t1
Z P1 h
i
L=
F × dP
(41)
δL =
t0
o, più in generale
L=
P0
Z
l
Z h
i
F × dP
δL =
(42)
l
che rappresenta un integrale di linea. In coordinate cartesiane possiamo scrivere
Z h
Z x1
Z y1
Z z1
Z
i Z
δL =
Fx dx+
Fy dy+
Fz dz.
F × dP = [Fx dx + Fy dy + Fz dz] =
l
l
l
x0
y0
z0
(43)
12
Definizione 5 Si dice che F è un campo di forze conservativo se l’integrale lungo
la linea l dipende solo dagli estremi P0 e P1 .
Una seconda definizione equivalente è la seguente
Definizione 6 Si dice che F è un campo di forze conservativo se l’integrale lungo
una qualsiasi linea chiusa l (senza buchi all’interno della linea chiusa) è nullo.
Una terza definizione è data da
Definizione 7 Si dice che F è un campo di forze conservativo se esiste una funzione scalare regolare U ≡ U (x, y, z), detta funzione potenziale tale che δL = dU.
Condizione Necessaria e Sufficiente 1 affinché il campo di forze F sia conservativo è che
rotF = 0,
(44)
dove rotF è il rotore della forza F . In questo caso, F si dice irrotazionale. In
componenti cartesiane rotF si può rappresentare come
¯
¯
¯ i j k ¯
µ
¶
µ
¶
µ
¶
¯
¯ ∂
∂Fz ∂Fy
∂Fz ∂Fx
∂Fy ∂Fx
∂
∂ ¯
¯
−
−
−
−j
+k
.
rotF = ¯ ∂x ∂y ∂z ¯ = i
∂y
∂z
∂x
∂z
∂x
∂y
¯ F F F ¯
x
y
z
(45)
Allora F è della forma
F = gradU,
(46)
dove gradU è il gradiente del potenziale U e in termini cartesiani possiamo scrivere
Fx i + Fy j + Fz k =
∂U
∂U
∂U
k.
i+
j+
∂x
∂y
∂z
(47)
Se esiste il potenziale allora dalla 43, possiamo scrivere
¸ Z
Z ∙
Z
∂U
∂U
∂U
dx +
dy +
dz = dU = U (P1 )−U (P0 ) .
L = [Fx dx + Fy dy + Fz dz] =
∂y
∂z
l
l ∂x
l
(48)
Esempio 2 (Forza costante) Per esempio, la forza peso. La forza F è costante
in modulo, direzione e verso. Prendiamo una terna di assi cartesiani, tale che
l’asse x sia parallelo ad F = F i. Dalla 48, si ricava
⎧
∂U
⎨ Fx = F = ∂x
Fy = 0 = ∂U
=⇒
U (x) = F x + costante.
(49)
∂y
⎩
∂U
Fz = 0 = ∂z
Nel caso della forza peso, se y è l’asse verticale ascendente il vettore p = −pj e il
potenziale vale
U (y) = −py + costante,
(50)
mentre se y è l’asse verticale discendente il vettore p = pj e il potenziale vale
U (y) = py + costante.
(51)
13
Esempio 3 (Forza di tipo centrale) Sia O un punto fisso e
F =
½
f (r) u
−f (r) u
forza repulsiva
,
forza attrattiva
Fissiamo una terna con origine in O e sia r =
Infatti
⎧
⎨ Fx = ±f (r) xr
Fy = ±f (r) yr
⎩
Fz = ±f (r) zr
⎧
⎨
⎩
=⇒
∂U
∂x
∂U
∂y
∂U
∂z
−−−−→
P −O
f (r) ≥ 0 e u = ¯¯−−−−→¯¯ .
¯P − O¯
(52)
p
x2 + y 2 + z 2
U (r) − U (r0 ) =
Z
r
f (t) dt.
(53)
r0
∂r
= ±f (r) ∂x
= ±f (r) xr
∂r
= ±f (r) ∂y
= ±f (r) yr .
∂r
= ±f (r) ∂z
= ±f (r) zr
(54)
Esempio 4 (Forza elastica) Sia F della forma
³−−−−→´
F = −k P − O = −kru,
allora
U (r) = −
Z
r
(55)
1
ktdt = − kr2 + costante.
2
(56)
Esempio 5 (Forza gravitazionale newtoniana) Sia F della forma
F = −G
allora
U (r) = −
Z
r
G
Mm
u,
r2
(57)
Mm
Mm
+ costante.
dt = G
2
t
r
(58)
Teoremi di Conservazione
1. Conservazione della quantità di moto secondo un asse Dalla prima equazione
cardinale della dinamica
d
0
,
Q = Rest. + Rest.
dt
(59)
se r è un asse fisso di versore u e
´
´
³
d
d ³
0
Q×u
Rest. + Rest. ×u = 0 = Q×u =
dt
dt
=⇒
Q×u = costante durante il moto
(60)
14
Esempio 6 Asta di lunghezza l e massa m
Nella direzione x non agiscono forze. Quindi
³
´
0
Rest. + Rest. ×i = 0 =⇒ Q×i = Qx = mvGx = costante durante il moto
(61)
Scriviamo la coordinata lungo l’asse x del baricentro
xG = x +
l
cos θ
2
=⇒
ẋG = ẋ −
l
sin θθ̇.
2
(62)
Poichè Qx è costante, anche
mvGx
µ
¶
l
= m ẋ − sin θθ̇ = costante.
2
Durante il moto
ẋ =
l
sin θθ̇.
2
(63)
(64)
2. Conservazione del momento della quantità di moto Dalla seconda equazione
cardinale della dinamica
d
0
ΓO + vO ∧ Q = M(O)est. + M(O)est.
,
dt
(65)
consideriamo due casi:
a) Se rispetto ad un polo O
0
= 0 e vO ∧Q = 0
M(O)est. +M(O)est.
=⇒
ΓO = costante durante il moto.
(66)
Esempio 7 Corpo libero pesante. La risultante dei momenti delle forze
0
attive e reattive rispetto al baricentro è nullo M(G)est. +M(G)est.
e vG ∧Q =
0, poichè vG k Q. Allora ΓG =costante.
15
b) Se rispetto ad un polo O e ad un asse fisso r di versore u, vO ∧ Q = 0 e
³
´
0
M(O)est. + M(O)est.
×u = 0 =⇒ ΓO ×u = costante durante il moto.
(67)
Esempio 8 Corpo Rigido con asse fisso. Supponiamo che l’asse fisso
sia orientato come l’asse z.Prendiamo
come polo O un
´ punto dell’asse,
³
0
allora vO ∧ Q = 0 poichè vO = 0. M(O)est. + M(O)est. × k = 0. Infatti
M(O)est. è un vettore perpendicolare a k, poichè la forza peso p ha la stessa
0
direzione di k. lo stesso vale per M(O)est.
, poichè il polo è un punto
dell’asse fisso e la reazione vincolare dell’asse è sempre perpendicoalre
all’asse stesso. Allora ΓO,z =costante.
3. Conservazione dell’Energia Consideriamo un sitema materiale soggetto a forze
attive conservative (interne ed esterne), a vincoli esterni fissi e a vincoli (interni ed esterni) non dissipativi o perfetti. Dal teorema dell’energia cinetica
nella prima forma, possiamo scrivere
dT
= Πest. + Πint.
dt
=⇒
dT = (Πest. + Πint. ) dt.
(68)
Per ipotesi, le forze che stiamo considerando sono conservative, per cui
dT = (Πest. + Πint. ) dt = dLest. + dLint. = dUest. + dUint. = d (Uest. + Uint. ) .
(69)
Scritto in modo compatto, si ottiene
d (T − Uest. − Uint. ) = 0
(70)
T − (Uest. + Uint. ) = E = costante durante il moto.
(71)
che, integrata fornisce1
La costante E si dice energia meccanica totale. Se i vincoli fossero scabri
(dissipativi), per il teorema dell’energia cinetica si può scrivere
dT = dU + dL0 ,
(72)
dove abbiamo indicato sinteticamente con U il potenziale delle forze attive
interne ed esterne e con dL0 il lavoro delle forze di reazione. Si noti che
dL0 < 0. In forma integrata, la precedente relazione diventa
E (t) = E0 + L0 .
1
Usando l’energia potenziale V al posto del potenziale U , si ottiene
T + (Vest. + Vint. ) = E = costante durante il moto.
(73)
16
Esempio 9 Consideriamo ancora l’esempio della figura a pagina 14 e scriviamo un altro integrale primo: l’integrale dell’energia
T − U = E.
(74)
Usiamo il teorema di König per il calcolo di T
¢ 1
1 ¡
1 2 1
2
+ Iω ω 2 = m ẋ2G + ẏG
+
T = mvG
2
2
2
2
µ
ml2
12
¶
2
θ̇ .
Dobbiamo esprimere ẋG e ẏG in termini di l e θ
½
½
xG = x + 2l cos θ
ẋG = ẋ − 2l sin θθ̇
=⇒
,
yG = 2l sin θ
ẏG = 2l cos θθ̇
(75)
(76)
allora
¢ 1
1 ¡
2
+
T = m ẋ2G + ẏG
2
2
µ
ml2
12
¶
1
θ̇ = m
2
2
"µ
¶2 µ
¶2 #
ml2 2
l
l
+
ẋ − sin θθ̇ +
cos θθ̇
θ̇
2
2
24
¸
∙
ml2 2 1 2 ml2 2 1
1
l2 2
2
= m ẋ − ẋl sin θθ̇ + θ̇ +
θ̇ = mẋ +
θ̇ − mẋl sin θθ̇. (77)
2
4
24
2
6
2
2
può essere calcolato usando il teorema di composizione delle
Si noti che vG
velocità
2
2
2
vG
= (vtrasc. + vrel. )2 = vtrasc.
+ vrel.
+ 2vtrasc. × vrel. ,
(78)
dove vtrasc. = ẋ, vrel. = lθ̇/2 e l’angolo compreso tra vtrasc. e vrel. vale π/2 + θ.
Si ottiene
Ã
!
2
2
³π
´
lθ̇
l2 θ̇
l2 θ̇
2
2
2
vG = ẋ +
+ 2 ẋ
cos
+ θ = ẋ +
− ẋlθ̇ sin θ.
(79)
4
2
2
4
Il potenziale vale
l
U = mgyG = mg sin θ
2
(80)
1 2 ml2 2 1
l
mẋ +
θ̇ − mẋl sin θθ̇ − mg sin θ = E.
2
6
2
2
(81)
e l’energia totale diventa
Sappiamo che questo sistema ha un secondo integrale primo: la quantità di
moto lungo l’asse x, espresso dalla 63. Se supponiamo, per fissare le idee, che
come condizione iniziale, l’asta sia in quiete in posizione orizzontale, allora
l’energia totale E in quella configurazione è nulla, per cui
(
2 2
1
l
mẋ2 ³
+ ml6 θ̇ − 12 m
2
´ẋl sin θθ̇ − mg 2 sin θ = E = 0 .
(82)
m ẋ − 2l sin θθ̇ = 0 =⇒ ẋ = 2l sin θθ̇
17
Eliminando ẋ nel sistema precedente, si ottiene
µ
¶2
µ
¶
1
ml2 2 1
l
l
l
m
sin θθ̇ +
θ̇ − m
sin θθ̇ l sin θθ̇ − mg sin θ
2
2
6
2
2
2
µ
¶2
1
ml2 2
l
l
− m
sin θθ̇ +
θ̇ − mg sin θ = 0
2
2
6
2
⇓
l
l 2
l
2
2
2
− sin2 θθ̇ + θ̇ = g sin θ =⇒ θ̇ = 3g sin θ + 3 sin2 θθ̇ .
(83)
4
3
4
Calcoliamo , per esempio, la velocità angolare quando l’asta passa per la
verticale, cioè θ = π/2. La precedente espressione diventa
r
l 2
3g
θ̇ = g =⇒ θ̇ = ±2
.
(84)
12
l
Per
θ = π/2
tornando indietro
r
=⇒
θ̇ = 2
r
θ̇ = −2
3g
,
l
3g
.
l
(85)
(86)
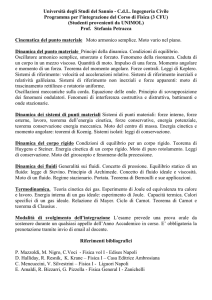
Esempio 10 Si consideri il sistema di figura
formato da un disco di massa m e raggio R che rotola senza strisciare su un
piano inclinato di massa M. Il piano inclinato è libero di muoversi rispetto
ad un sistema di riferimento fisso senza attrito. Determinare il moto del disco
sapendo che, per t = 0 il sistema si trova in quiete con il disco nella posizione
più alta. Consideriamo il sistema di riferimento di figura e osserviamo che
le forze in gioco, attive e reattive si riducono alla sola forza peso. Poichè
i vincoli non sono dissipativi, l’energia meccanica si conserva, come pure si
conserva la componente della quantità di moto lungo l’asse x. Calcoliamo Qx
Qx = M ẋ + m (ẋ + ṡ cos α) = costante.
(87)
18
Poichè il sistema si trova in quiete al tempo t = 0
Qx (t) = Qx (0) = 0.
Calcoliamo l’energia cinetica T = Tdisco + Tp.inclinato , dove
½
Tp.inclinato = 12 M ẋ2
.
1
2
Tdisco = 2 mvG + 12 IG ω 2 (teorema di König)
Le coordinate del baricentro di G e le relative velocità sono
½
½
xG = x + s cos α
ẋG = ẋ + ṡ cos α
=⇒
yG = s sin α
ẏG = ṡ sin α
e
(88)
(89)
(90)
¶
mR2
ω2
Tdisco
2
µ
¶ µ ¶2
ṡ
1 mR2
1 £¡
2
2 ¢¤
= m (ẋ + ṡ cos α) + (ṡ sin α) +
2
2
2
R
1
1
1
1
3
= mẋ2 + mṡ2 + mẋṡ cos α + mṡ2 = mẋ2 + mṡ2 + mẋṡ cos α. (91)
2
2
4
2
4
Per il rotolamento senza strisciamento ω = ṡ/R. Come nell’esempio prece2
dente vG
può essere calcolato con la composizione delle velocità
¢ 1
1 ¡
2
= m ẋ2G + ẏG
+
2
2
µ
2
2
2
vG
= (vtrasc. + vrel. )2 = vtrasc.
+ vrel.
+ 2vtrasc. × vrel. ,
(92)
dove vtrasc. = ẋ, vrel. = ṡ e l’angolo compreso tra vtrasc. e vrel. vale α. Segue
che
2
vG
= ẋ2 + ṡ2 + 2ẋṡ cos (α) .
(93)
Complessivamente
1
3
1
T = Tdisco + Tp.inclinato = mẋ2 + mṡ2 + mẋṡ cos α + M ẋ2 .
2
4
2
(94)
Il potenziale vale
U = mgyG = mgs sin α
(95)
1
3
(m + M) ẋ2 + mṡ2 + mẋṡ cos α − mgs sin α = E.
2
4
(96)
e l’energia totale diventa
Dalle condizioni iniziali deduciamo che E = 0. Sfruttando la conservazione
della quantità di moto 87, possiamo esprimere ẋ in funzione di ṡ
ẋ = −
m cos α
ṡ,
m+M
(97)
per cui l’espressione 96 diventa
µ
¶2
¶
µ
1
m cos α
3 2
m cos α
(m + M) −
ṡ + mṡ + m −
ṡ ṡ cos α − mgs sin α
2
m+M
4
m+M
19
1 m2 cos2 α 2 3 2
cos2 α 2
ṡ + mṡ − m2
ṡ − mgs sin α = 0.
(98)
2 m+M
4
m+M
Isolando ṡ2 , si ottiene
µ
¶
¶
µ
4 (m + M)
3 1 m cos2 α 2
2
−
ṡ = gs sin α =⇒ ṡ = gs sin α
.
4 2 m+M
3 (m + M) − 2m cos2 α
(99)
Se poniamo
4 (m + M) g sin α
= costante,
(100)
a=
3 (m + M) − 2m cos2 α
l’equazione precedente diventa
ṡ2 = as.
(101)
Possiamo risolverla in due modi
(a) Estraiamo la radice quadrata e ricaviamo
ṡ =
√
ds
= ± as
dt
=⇒
variabili separabili
√
ds
√ = ± adt
s
=⇒
√
√
2 s = ± at.
(102)
Quindi
a
a
s (t) − s (0) = ± t2 =⇒ s (t) = t2 ,
(103)
4
4
dove abbiamo usato la condizione iniziale s (0) = 0 e abbiamo scartato il
segno “−” poichè lo spostamento non avviene spontaneamente in salita.
(b) Deriviamo rispetto al tempo t, l’equazione 101 e otteniamo
2ṡs̈ = aṡ
=⇒
2s̈ = a
=⇒
a
s̈ = .
2
(104)
Abbiamo diviso per ṡ con l’ipotesi che ṡ 6= 0. L’equazione differenziale
è del secondo ordine. Dobbiamo integrare due volte
s̈ =
a
2
=⇒
a
ṡ (t) − ṡ (0) = t
2
=⇒
a
ṡ (t) = t,
2
(105)
dove abbiamo usato la condizione iniziale di quiete ṡ (0) = 0. Integrando
una seconda volta si ricava
a
ṡ (t) = t
2
=⇒
a
s (t) − s (0) = t2
4
=⇒
a
s (t) = t2 .
4
(106)
I teoremi di conservazione enunciati forniscono degli integrali primi del moto.
(Qx = costante, ΓO,z = costante). Gli integrali primi del moto sono funzioni delle
coordinate libere e delle loro derivate prime rispetto al tempo, che si mantengono
costanti durante il moto.