ISTITUTO SUPERIORE DI SANITÀ
Sistema ottico per la misura delle correnti
indotte su elettrocateteri di pacemaker
durante esami di risonanza magnetica
Eugenio Mattei, Federica Censi, Michele Triventi,
Pietro Bartolini, Antonello Delogu, Angelo Angeloni,
Maurizio Del Guercio, Giovanni Calcagnini
Dipartimento di Tecnologie e Salute
ISSN 1123-3117
Rapporti ISTISAN
13/40
Istituto Superiore di Sanità
Sistema ottico per la misura delle correnti indotte su elettrocateteri di pacemaker durante esami di risonanza
magnetica.
Eugenio Mattei, Federica Censi, Michele Triventi, Pietro Bartolini, Antonello Delogu, Angelo Angeloni, Maurizio
Del Guercio, Giovanni Calcagnini
2013, 48 p. Rapporti ISTISAN 13/40
In questo rapporto è presentato un sistema ottico per la misura delle correnti indotte dai campi di gradiente su
elettrocateteri impiantabili, durante esami di MRI (Magnetic Resonance Imaging). Il sistema viene inizialmente
descritto in dettaglio e poi caratterizzato attraverso misure in laboratorio. Segue la presentazione dei risultati ottenuti
su simulatori di paziente in scanner clinici per MRI. Le correnti indotte dai campi di gradiente lungo l’elettrocatetere
di un pacemaker raggiungono valori >1 mA solo nel periodo di pacing (impulso + intervallo di ricarica) e non
rappresentano quindi una fonte di rischio significativo per il paziente. Le correnti indotte potrebbero pero ridurre
l’ampiezza dell’impulso e portarlo sotto la soglia di stimolazione, inficiando la capacità di produrre contrazione del
miocardio. Il sistema è stato anche utilizzato per valutare gli effetti sullo stimolatore del movimento all’interno del
campo magnetico statico generato dallo scanner. Movimenti veloci effettati vicino all’apertura centrale dello scanner
sono in grado di determinare inibizione inappropriata dello stimolatore.
Parole chiave: Risonanza magnetica; Pacemaker; Campi elettromagnetici; Sicurezza
Istituto Superiore di Sanità
Optically coupled sensor for the measure of induced currents into pacemaker leads during magnetic resonance
imaging.
Eugenio Mattei, Federica Censi, Michele Triventi, Pietro Bartolini, Antonello Delogu, Angelo Angeloni, Maurizio
Del Guercio, Giovanni Calcagnini
2013, 48 p. Rapporti ISTISAN 13/40 (in Italian)
The design and the development of an optically coupled system able to measure the currents induced by the
Magnetic Resonance Imaging (MRI) gradient fields into endocardial leads is hereby proposed. The detailed
description and characterization of the system is first reported. Results inside clinical MRI scanners are then reported:
the MRI gradient sequence has the potential to induce currents values >1 mA only during the stimulator pacing
interval (pulse + recharging period). Given the typical duration of such interval (<10 ms - shorter than the refractory
period of the heart that follows the pulse) the induced current is unlikely to represent a serious hazard for the patient.
However, the induced current has the potential to affect the capability of triggering a heartbeat, by modifying the
overall energy delivered by the stimulator. The system also been used to evaluate the effect on a pacemaker implant
of the movement inside the static magnetic field of the MRI scanner. Rapid movements in the area where the spatial
gradient of the magnetic field is maximum may induce an inappropriate inhibition of the stimulator.
Key words: Magnetic Resonance Imaging; Pacemaker; Electromagnetic fields; Safety
La ricerca descritta è stata svolta nell’ambito del programma strategico “Rischi diretti e indiretti per la salute e la
sicurezza di lavoratori e pazienti derivanti dall’utilizzo nelle strutture sanitarie di tecnologie emergenti basate sui
campi elettromagnetici”. Si ringrazia il dott. Vittorio Cannatà dell’IRCCS Ospedale Pediatrico Bambino Gesù per il
supporto offerto nelle misure effettuate su scanner clinici per MRI; si ringrazia inoltre la Dott.ssa Rosaria Falsaperla
dell’INAIL per il lavoro di coordinamento e di supporto durante l’intero corso del progetto di ricerca.
Per informazioni su questo documento scrivere a: [email protected]
Il rapporto è accessibile online dal sito di questo Istituto: www.iss.it.
Citare questo documento come segue:
Mattei E, Censi F, Triventi M, Bartolini P, Delogu A, Angeloni A, Del Guercio M, Calcagnini G. Sistema ottico per la misura
delle correnti indotte su elettrocateteri di pacemaker durante esami di risonanza magnetica. Roma: Istituto Superiore di Sanità;
2013. (Rapporti ISTISAN 13/40).
Presidente dell’Istituto Superiore di Sanità e Direttore responsabile: Fabrizio Oleari
Registro della Stampa - Tribunale di Roma n. 131/88 del 1° marzo 1988 (serie: Rapporti e congressi ISTISAN)
Redazione: Paola De Castro e Sandra Salinetti
La responsabilità dei dati scientifici e tecnici è dei singoli autori.
© Istituto Superiore di Sanità 2013
viale Regina Elena, 299 – 00161 Roma
Rapporti ISTISAN 03/xxxx
INDICE
Introduzione........................................................................................................................................
1
1. Risonanza magnetica e dispositivi impiantabili attivi .................................................
3
1.1. Rischi potenziali dei sistemi di MRI sui pacemaker .................................................................
1.2. Campi di gradiente ed elettrocateteri ........................................................................................
1.3. Interferenza da movimento nel campo magnetico statico .........................................................
5
6
8
2. Progetto e realizzazione del sistema .................................................................................. 10
2.1. Resistenza di misura..................................................................................................................
2.2. Filtro passa-basso......................................................................................................................
2.3. Amplificatore per strumentazione.............................................................................................
2.4. Filtro anti-aliasing .....................................................................................................................
2.5. Microcontrollore e conversione A/D.........................................................................................
2.6. Trasmettitore/ricevitore ottico...................................................................................................
2.7. Circuito batteria ........................................................................................................................
2.8. Scheda di acquisizione ..............................................................................................................
12
12
14
15
17
21
22
23
3. Caratterizzazione metrologica e prove in laboratorio ................................................. 24
3.1. Verifica della frequenza di campionamento..............................................................................
3.2. Verifica delle massime e minime ampiezze acquisibili ............................................................
3.3. Verifica della frequenza di taglio..............................................................................................
3.4. Acquisizione dell’impulso del pacemaker ................................................................................
3.5. Prove di interferenza da campo magnetico variabile ................................................................
24
25
27
28
30
4. Protocollo sperimentale e prove in risonanza magnetica ......................................... 34
4.1. Valutazione delle correnti indotte dai campi di gradiente
sul paziente portatore di pacemaker.......................................................................................... 34
4.2. Valutazione delle interferenze da movimento nel campo magnetico statico ............................ 38
4.3. Valutazione delle interferenze indotte dalla scansione MRI
sul lavoratore portatore di pacemaker ....................................................................................... 43
Conclusioni ......................................................................................................................................... 45
Bibliografia .......................................................................................................................................... 47
Rapporti ISTISAN 13/40
INTRODUZIONE
L’imaging mediante risonanza magnetica (Magnenitc Resonance Imaging, MRI) è una
tecnica di diagnosi clinica che, grazie alla natura non ionizzante dei campi elettromagnetici che
utilizza, è oggi considerata sicura per la maggior parte dei pazienti. È tuttavia controindicata per
i pazienti portatori di protesi metalliche ed, in particolare, per i portatori di dispositivi medici
impiantabili attivi, quali ad esempio i pacemaker, i defibrillatori impiantabili e i
neurostimolatori. Anche nel caso di dispositivi impiantabili certificati come compatibili con
l’ambiente MRI, l’esame deve essere effettato con molta attenzione e i rischi per il paziente
sono effettivamente minimizzati solo se una serie di condizioni, indicate dal fabbricante del
dispositivo, sono rispettate. I rischi più importanti per un paziente portatore di dispositivi
impiantabili attivi sottoposto ad esame MRI derivano dal campo a radiofrequenza e dai campi di
gradiente che vengono generati dallo scanner al fine di ricostruire le immagini anatomiche dei
tessuti umani. I campi a radiofrequenza (64 MHz per i sistemi di MRI a 1,5 T e 128 MHz per
quelli a 3 T) possono trasferire energia alle componenti metalliche del dispositivo impiantabile e
generare riscaldamento locale dei tessuti, nei punti di contatto con il dispositivo stesso. I campi
di gradiente, caratterizzati invece da una frequenza più bassa (1-10 kHz), sono utilizzati per la
codifica spaziale dell’immagine e la loro interazione con un dispositivo impiantabile può essere
descritta, in prima analisi, come un esempio di induzione elettromagnetica, che segue la legge di
Faraday-Neumann-Lenz: i campi magnetici di gradiente tempo-variabili si concatenano infatti
con la spira formata dal dispositivo impiantabile con il suo elettrocatetere e i tessuti circostanti,
inducendo una differenza di potenziale proporzionale alla derivata nel tempo del flusso di
campo magnetico concatenato con la spira stessa.
Negli ultimi anni sono state pubblicate numerose ricerche che hanno studiato e descritto i
meccanismi alla base del riscaldamento indotto da radiofrequenza sugli elettrocateteri di
dispositivi impiantabili. Gli studi che invece hanno affrontato in modo specifico i rischi
derivanti dai campi di gradiente sono ancora oggi molto limitati. Alcuni studi in vitro e su
animali hanno evidenziato la possibilità da parte del campo elettromagnetico generato da un
sistema per MRI di indurre correnti elettriche lungo elettrocateteri impiantati. Studi clinici
hanno riportato l’insorgenza di battiti ectopici in pazienti con pacemaker o defibrillatori
impiantabili sottoposti ad MRI. L’effetto di queste correnti indotte potrebbe, infatti, portare a
stimolazioni in alta frequenza del miocardio, che potrebbero compromettere l’efficienza
emodinamica del cuore, fino ad indurre fibrillazione ventricolare. Pur non essendo mai stato
osservato su pazienti, è stato ipotizzato che questo fenomeno sia la causa di alcuni degli episodi
di morte di portatori di pacemaker sottoposti ad MRI e non monitorati durante l’esecuzione
dell’esame. Allo stato attuale delle conoscenze, è difficile dire con certezza se il pericolo delle
correnti indotte dai campi di gradiente rappresenti per i pazienti con elettrocateteri impiantabili
un rischio importante o meno. I motivi per cui gli studi su questo particolare aspetto sono così
limitati vanno ricercati nella difficoltà di misurare direttamente e in modo affidabile le correnti
che si inducono lungo gli elettrocateteri durante una scansione MRI.
I dispositivi di nuova generazione certificati come compatibili con l’ambiente MRI (MRconditional) hanno introdotto novità tecnologiche e accorgimenti procedurali per renderli meno
suscettibili agli effetti del campo generato in MRI: sono stati eliminati i materiali
ferromagnetici, sono state sviluppate nuove soluzioni circuitali e sono state introdotte specifiche
modalità di programmazione per ridurre il più possibile le interferenze prodotte dal segnale MRI
sul funzionamento del dispositivo. In particolare, sulla base dei dati riportati in letteratura da
studi in vitro, in silico, su animali e da trial clinici, i fabbricanti dei dispositivi impiantabili
1
Rapporti ISTISAN 13/40
hanno individuato un limite massimo alla potenza complessiva del campo a radiofrequenza,
sotto il quale i rischi per il paziente portatore di dispositivo MR-conditional possono essere
considerati accettabili. Gli stessi fabbricanti hanno anche definito un valore massimo di intensità
di variazione dei campi di gradiente. Tuttavia, data la scarsità di dati scientifici prodotti sino ad
oggi a riguardo e la mancanza di metodologie standardizzate per la rilevazione e la
quantificazione degli effetti indotti dai campi di gradiente, tali valori soglia sono stati definiti
più sulla base di principi puramente precauzionali che su reali evidenze.
Nel presente rapporto è descritto in dettaglio la progettazione, la realizzazione e la
caratterizzazione, di un sistema che il Dipartimento di Tecnologie e Salute dell’Istituto
Superiore di Sanità ha sviluppato nell’ambito del programma strategico “Rischi diretti e indiretti
per la salute e la sicurezza di lavoratori e pazienti derivanti dall’utilizzo nelle strutture sanitarie
di tecnologie emergenti basate sui campi elettromagnetici”. Il sistema è un sensore per misure in
vitro, attraverso cui ottenere informazioni qualitative e quantitative sulle correnti indotte dai
campi di gradiente su elettrocateteri impiantabili durante un esame MRI.
Alla descrizione dettagliata del sensore e delle diverse componenti circuitali che lo
compongono segue la caratterizzazione del suo funzionamento attraverso prove in laboratorio e
infine la presentazione di misure effettuate su simulatori di paziente in scanner clinici per MRI.
2
Rapporti ISTISAN 13/40
1. RISONANZA MAGNETICA
E DISPOSITIVI IMPIANTABILI ATTIVI
L’MRI è ormai divenuto la scelta di elezione per lo studio morfologico e, più recentemente,
anche funzionale, di molti tessuti umani, in particolare le strutture molli. La rapida diffusione
che questa modalità diagnostica ha incontrato negli ultimi anni è legata alla capacità di fornire
immagini del corpo umano in 3 dimensioni ad altissima risoluzione, senza dover ricorrere
all’utilizzo di radiazioni ionizzanti. Questo notevole sviluppo ha però comportato anche una
crescente attenzione nei confronti dei possibili disturbi che i sistemi di MRI possono generare
sulle altre apparecchiature medicali, in particolare sui Dispositivi Medici Impiantabili Attivi
(DMIA). La presenza di un DMIA come un pacemaker, uno stimolatore neurale, un
defibrillatore impiantabile, ecc., ha da sempre rappresentato una controindicazione, spesso
anche assoluta, all’esecuzione di un esame MRI.
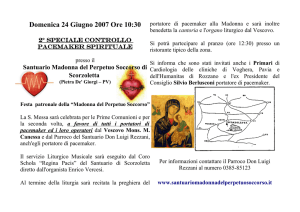
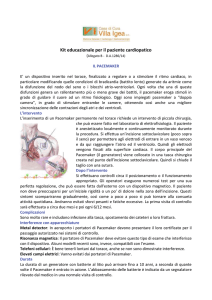
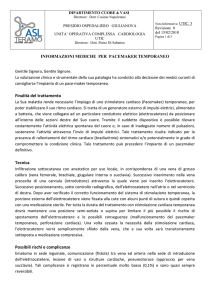
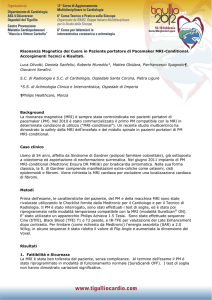
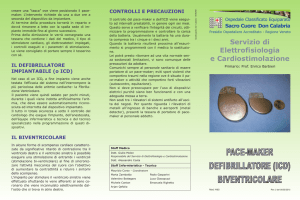
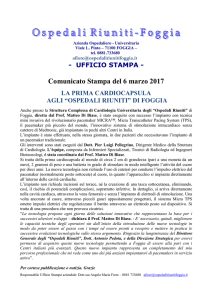
Nell’ultimo decennio, la parallela crescita dell’utilizzo della risonanza magnetica (Figura 1)
e del numero di impianti di DMIA, in particolare pacemaker e defibrillatori-cardioverter
impiantabili (Implantable Cardioverter-Defibrillator, ICD) (Figura 2), ha comportato che un
numero sempre più significativo di pazienti non potesse usufruire degli indubbi benefici che la
MRI è in grado di offrire. Secondo stime recenti rese disponibili da Medtronic, una delle
principali aziende produttrici di pacemaker, la percentuale di pazienti portatori di stimolatori
impiantabili cardiaci candidata ad essere sottoposta ad un esame MRI, nel corso della vita utile
del dispositivo, raggiunge il 40% in Europa e il 50-75% negli USA. Le stesse stime affermano
che ogni 6 minuti in Europa e ogni 3 minuti negli USA, ad un paziente viene negata la
possibilità di eseguire un esame MRI per colpa della presenza di un pacemaker o di un ICD.
30,0
Strutture non ospedaliere
Strutture ospedaliere fisse
# di esami MRI (Milioni)
25,0
21,9
Strutture ospedaliere mobili
20,0
18
15,8
10,0
5,0
9,1
9,8
10,9
0,8
0,9
1,0
4,7
5,3
4,3
4,0
4,2
4,6
1996
1997
11,9
1,3
27,5
0,9
0,8
14,1
24,2
1,0
0,9
11,6
12,2
12,8
13,7
11,6
11,6
11,7
12,0
2003
2004
2005
2006
0,8
10,9
1,2
1,1
5,8
26,6
1,5
1,4
13,8
15,0
25,3
24,7
8,8
6,8
7,8
5,0
5,8
6,7
1998
1999
2000
7,8
9,5
2001
2002
12,6
0,0
1995
2007
Figura 1. Numero complessivo di esami di MRI eseguiti negli USA, in strutture ospedaliere e non,
nel periodo 1995-2007
3
Rapporti ISTISAN 13/40
20,0
Pacemaker
18,0
Defibrillatori impiantabili
# di pazienti (milioni)
16,0
14,0
12,0
10,0
0,8
0,6
0,4
0,2
0,0
1993
1994
1995
1996
1997
1998
1999
2000
2001
2002
2003
2004
Figura 2. Numero di impianti di pacemaker e defibrillatori impiantabili negli USA,
nel periodo 1993-2004
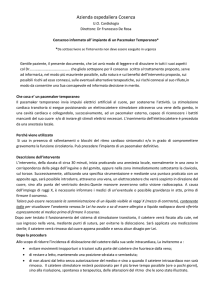
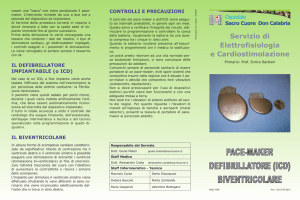
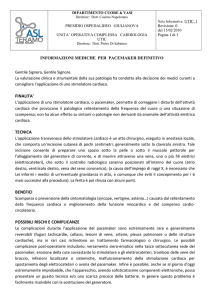
I dati sopra riportati giustificano l’interesse che la comunità scientifica ha manifestato negli
ultimi anni nel tentativo di individuare soluzioni tecnologiche e organizzative capaci di
estendere i benefici della MRI ai pazienti portatori di DMIA (Figura 3). Oggi, i risultati ottenuti
dalla ricerca in questo settore sono fruibili a tutti: a fine del 2008 è stato rilasciato il primo
marchio CE (Conformità Europea) per un sistema di pacemaker ed elettrocatetere compatibile
con la risonanza magnetica, se pur sotto limitate condizioni di utilizzo (campo statico limitato a
1,5 T; potenza depositata sul paziente limitata a 2 W/kg; intensità dei campi di gradiente
limitatati a 200 mT/sm; possibilità di eseguire l’esame ad esclusione delle regione toracica). A
febbraio del 2011 lo stesso dispositivo ha ottenuto anche l’approvazione della Food and Drug
Adiministration, assieme ad un nuovo sistema per il quale cade la restrizione di poter effettuare
l’indagine MRI solo al di fuori della regione toracica. Sempre nel 2011 il primo sistema di
defibrillazione impiantabile ha ottenuto l’autorizzazione europea a essere utilizzato in ambiente
MRI, se pur sempre in specifiche condizioni d’uso e sotto attento monitoraggio da parte dello
staff medico.
L’entrata in commercio di pacemaker e ICD compatibili con i sistemi di MRI rappresenta
senza dubbio un importante passo verso la possibilità di estendere i benefici che questa tecnica
diagnostica offre anche ai portatori di DMIA; tuttavia molte problematiche restano ancora
aperte e molti aspetti meritano di essere ulteriormente studiati e approfonditi: gli attuali
pacemaker MR-conditional sono certificati solo per scanner a 1,5 T con gantry chiuso, a fronte
di una rapida evoluzione tecnologica verso sistemi a 3 T e verso sistemi a campo più basso, ma
con gantry aperto. Esiste inoltre una significativa porzione di pazienti con impianti
convenzionali, per i quali l’esame MRI, benché comporti dei rischi noti, potrebbe allo stesso
tempo rappresentare un significativo beneficio clinico, non ottenibile con altre tecniche
diagnostiche.
4
Rapporti ISTISAN 13/40
35
30
# pubblicazioni
25
20
15
10
10
5
0
1992 1993 1994 1995 1996 1997 1998 1999 2000 2001 2002 2003 2004 2005 2006 2007 2008 2009 2010 2011 2012 2013
anno
Figura 3. Numero di pubblicazioni scientifiche sui problemi di compatibilità tra sistemi per MRI
e pacemaker/ICD, nel periodo 1992-2013 (settembre) (il primo impianto di pacemaker
compatibile con i sistemi di MRI è stato immesso in commercio nel 2008)
1.1. Rischi potenziali dei sistemi di MRI sui pacemaker
I sistemi di MRI utilizzano tre diverse tipologie di campo magnetico per ottenere le
immagini dei tessuti umani:
‒ un elevato campo magnetico statico (tipicamente 1,5 T, 3 T);
‒ un campo tempo-variabile a radiofrequenza (RF, 64 MHz per i sistemi a 1,5 T; 128 MHz
per quelli a 3 T);
‒ un campo tempo-variabile di gradiente magnetico (1-10 kHz).
Gli effetti principali che questi tre elementi di campo possono determinare interagendo con
un impianto di pacemaker o con un simile DMIA sono:
‒ effetto meccanico, rappresentato dal momento torcente cui viene sottoposto il pacemaker,
a seguito dell’azione prodotta dal campo magnetico statico sulle componenti
ferromagnetiche e paramagnetiche del dispositivo;
‒ effetto termico, provocato dalle perdite resistive che si determinano all’interno dei tessuti
biologici, in conseguenza del passaggio di correnti indotte sulle componenti metalliche
del pacemaker (in particolare la porzione conduttiva dell’elettrocatetere);
‒ effetto interferente, dovuto alla possibilità che il campo elettromagnetico generato durante
la scansione: 1) alteri la capacità del pacemaker di rilevare correttamente l’attività
fisiologica del cuore e di sincronizzare in modo adeguato i suoi tempi di generazione di
impulsi; 2) generi direttamente delle correnti di intensità sufficiente a determinare la
contrazione (non voluta) delle fibre del miocardio.
I materiali che oggi sono utilizzati nella realizzazione dei pacemaker (principalmente titanio
e sue leghe), presentano proprietà magnetiche tali per cui l’effetto meccanico causato dal campo
magnetico statico risulti trascurabile. I risultati riportati in letteratura (1, 3) confermano, infatti,
5
Rapporti ISTISAN 13/40
che il momento torcente cui viene sottoposto un pacemaker posto all’interno del campo
magnetico generato dai sistemi per MRI clinico (≤ 3T) sia comparabile con la forza di gravità
che sulla terra agisce sullo stesso dispositivo.
Lo studio dei rischi derivanti dal riscaldamento indotto dalle componenti tempo-variabili del
campo elettromagnetico generato dai sistemi per MRI rappresenta il settore in cui la ricerca
scientifica ha maggiormente concentrato, sino a oggi, la sua attività: in letteratura sono
disponibili un gran numero di eccellenti lavori che hanno affrontato questa tematica, utilizzando
sia approcci sperimentali in vitro e in vivo, che tecniche di modellizzazione numerica (4-10); i
risultati ottenuti hanno permesso di individuare gli elementi che giocano un ruolo chiave nel
determinare il grado di riscaldamento prodotto durante la scansione e di proporre soluzioni
pratiche per limitare questo fenomeno, soluzioni che sono alla base dei moderni pacemaker MRconditional. Il riscaldamento indotto è proporzionale alla potenza del segnale elettromagnetico
che lo determina, per cui il suo studio può essere limitato, almeno in prima approssimazione,
alla sola componente a RF (la cui potenza è diversi ordini di grandezza superiore rispetto a
quella dei gradienti magnetici).
Il rischio più rilevante che deriva dai campi di gradiente è invece legato all’effetto
interferente: prima di effettuare una scansione, è possibile programmare il pacemaker in
modalità appropriata (es. stimolazione asincrona), così da evitare ogni eventuale alterazione del
corretto funzionamento del dispositivo, conseguente a sensing inappropriato. Questa soluzione,
tuttavia, non mette a riparo delle correnti che i campi di gradiente possono indurre direttamente
lungo l’elettrocatetere e che, se d’intensità sufficiente, possono stimolare il miocardio e generare
aritmie potenzialmente pericolose. Lo studio delle correnti indotte dai campi di gradiente lungo
gli elettrocateteri rappresenta un settore ancora poco esplorato, a causa della difficoltà nel
realizzare sensori in grado di misurare queste correnti e di lavorare all’interno di ambienti
particolarmente ostili, quali quelli per sistemi di MRI.
Lo sviluppo di un sensore per la misura in vitro delle correnti di gradiente indotte lungo un
elettrocatetere durante una scansione di MRI rappresenta proprio lo scopo dell’attività di ricerca
descritta in questo lavoro.
1.2. Campi di gradiente ed elettrocateteri
I campi di gradiente magnetico sono caratterizzati da frequenze generalmente comprese tra 1
e 10 kHz e sono utilizzati per ottenere le informazioni spaziali dei distretti anatomici in esame.
Nella maggior parte dei sistemi per MRI, i campi di gradiente sono ottenuti da tre distinte
bobine capaci di generare segnali magnetici variabili con una velocità che va da 30 T/s sino a
180 T/s. L’effetto delle bobine di gradiente è di generare un campo magnetico BG dipendente
dalla posizione spaziale, il cui andamento è descritto dalla seguente espressione:
BG
^
^
^
dB ^ dB ^ dB ^
x
y
z Gx x Gx y Gx z G r ;
dx
dy
dz
Le dimensioni di G sono T/m, ma più comunemente si utilizza il sottomultiplo mT/m. Sistemi
tipici di gradiente devono essere in grado di produrre gradienti da 10 mT/m fino a 100 mT/m.
Le bobine di gradiente possono avere diverse forme. Per generare i gradienti lungo z
(direzione principale del campo magnetico statico) si utilizzano le bobine di Maxwell o loro
varianti mentre, per i gradienti lungo x e y le bobine Golay (bobine “a sella”) o loro varianti
(Figura 4).
6
Rapporti ISTISAN 13/40
Gradiente lungo z: Bobine di Maxwell
Gradiente lungo x: Bobine di Golay
Gradiente lungo x: Bobine di Golay
z
x
y
Figura 4. Configurazioni tipiche delle bobine di gradiente
(per generare i gradienti lungo z si utilizzano le bobine di Maxwell o loro varianti,
mentre per i gradienti lungo x e y le bobine Golay o loro varianti)
I campi generati delle singole bobine sono uniformi su di un piano e quando incontrano un
mezzo conduttivo (es. il corpo di un paziente) inducono al suo interno un campo elettrico che
viene notevolmente aumentato dalla presenza di elementi metallici.
La potenza dei campi di gradiente è diversi ordini di grandezza più bassa rispetto a quella del
segnale a RF, per cui il pericolo di riscaldamento indotto può essere, almeno in prima analisi,
trascurato. Il range di frequenza in cui operano non può invece escludere il potenziale pericolo per
una stimolazione non voluta dei tessuti: le correnti che, secondo la legge di Faraday, si inducono
lungo i percorsi a spira formati da un elettrocatetere di un DMIA, se di una sufficiente intensità,
possono infatti causare una stimolazione diretta dei tessuti nei quali fluiscono (Figura 5).
FEM =
d B
dt
B BG ds
S
FEM = forza elettromotrice indotta;
BG = campo magnetico di gradiente;
φB= flusso del campo magnetico;
S = superficie racchiusa dall’elettro-catetere
Figura 5. I campi magnetici di gradiente generano una forza elettromotrice indotta ai capi
dell’elettrocatetere proporzionale alla derivata temporale del flusso del campo magnetico
concatenato con la superficie racchiusa dall’elettrocatetere stesso (legge di Farady-Newmann-Lenz)
7
Rapporti ISTISAN 13/40
La difficoltà nel riuscire a misurare all’interno di sistemi per MRI le intensità delle correnti
indotte su elettrocateteri impiantati ha sino a oggi notevolmente limitato gli studi in questo
settore, per cui non esistono ancora dati certi sull’effettiva possibilità che la Forza
ElettroMotrice (FEM) indotta dai campi di gradiente su di un impianto di pacemaker o ICD e la
conseguente corrente che scorre dall’elettrocatetere nei tessuti, per chiudersi verso lo chassis del
dispositivo, sia in grado di provocare una stimolazione non voluta del tessuto miocardico.
In letteratura sono comunque riportati casi di eventi aritmici riscontarti su pazienti portatori
di pacemaker e sottoposti ad esame MRI (11-13): in particolare, sono stati osservati eventi di
stimolazione in alta frequenza e battiti ectopici, la cui causa è stata ipotizzata essere la corrente
indotta del sistema di MRI sull’elettrocatetere del pacemaker.
Nel 2008 Tandri et al. (14) hanno condotto misure sperimentali in vivo su animale allo scopo
di quantificare l’intensità delle correnti indotte dai campi magnetico a bassa frequenza genarti
durante esami MRI. Lo studio conclude che, in condizioni tipiche di impianto ed esposizione,
l’intensità della corrente indotta non è sufficiente a provocare la cattura delle fibre del
miocardio. Tuttavia, gli autori sottolineano come l’insorgere di aritmie non possa essere del
tutto escluso, dal momento che, per percorsi dell’elettrocatetere particolarmente sfavorevoli (es.
percorsi a larga area e con spire multiple), il valore della corrente può superare il valore soglia
che determinare la contrazione dei tessuti cardiaci. Una forte limitazione dello studio è
rappresentata dall’assenza di dettagli sulla realizzazione del sensore di corrente, che rende
particolarmente problematica la riproducibilità dei risultati ottenuti.
Un approccio alternativo alla misura diretta della corrente è presentato nel lavoro del 2009 di
Bassen e Mendoza (14): l’effetto dei campi di gradiente è valutato misurando il valore del
campo elettrico nell’intorno della punta dell’elettrocatetere. I risultati indicano come la
stimolazione non voluta del miocardio sia possibile, in particolare per gli elettrocateteri
abbandonati con il connettore libero non isolato e per gli impianti in cui si perda l’isolamento
elettrico della testa dello stimolatore. Inoltre, anche in condizione d’impianto corretto, la
morfologia dell’impulso di stimolazione erogato del pacemaker può subire drastiche modifiche
(aumentando o diminuendo al sua ampiezza), in funzione dell’interazione con il segnale indotto
dei campi di gradiente. Risultati analoghi sono stati confermati dagli stessi autori in uno studio
successivo (15) condotto attraverso analisi e simulazioni numeriche.
Gli esigui dati presenti in letteratura giustificano quindi l’impegno nella progettazione e
realizzazione di un sensore di corrente capace di misurare in modo selettivo e accurato la
corrente indotta dai campi di gradiente lungo un elettrocatetere, durante una scansione clinica
per MRI.
1.3. Interferenza da movimento
nel campo magnetico statico
Il circuito di misura per la rilevazione delle correnti indotte dai campi di gradiente può
inoltre essere utilizzato anche per monitorare l’attività del pacemaker o di un simile DMIA
durante il movimento del paziente all’interno del campo magnetico statico presente in una
camera per MRI. Questo infatti presenta una forte disomogeneità spaziale e il movimento al suo
interno equivale a tutti gli effetti ad un campo magnetico variabile, sia pur a frequenza molto
più bassa rispetto quello dei campi di gradiente utilizzati per l’imaging dei tessuti, che si
concatena con l’impianto. La conseguenza di questa variazione di campo magnetico concatenato
con l’impianto è la potenziale induzione di una forza elettromotrice ai capi dell’elettrocatetere e
quindi di una tensione che potrebbe portare il pacemaker a modificare in modo scorretto il
8
Rapporti ISTISAN 13/40
proprio funzionamento. Il valore del campo magnetico statico utilizzato dai sistemi per MRI è
1,5 T per la maggior parte di scanner usati in ambito clinico; in ambito di ricerca, sistemi a 3T
sono ormai largamente impiegati, soprattutto per l’imaging di particolari distretti corporei (es.
imaging funzionale della testa) e, visto il migliore rapporto segnale rumore che li caratterizza
rispetto ai sistemi a 1,5 T, è facile ipotizzare un loro imminente impiego anche nella routine
clinica. In ogni caso, il valore massimo di campo magnetico statico è limitato alla sola zona
centrale dello scanner mentre, muovendosi verso l’esterno, il campo decade molto rapidamente.
La velocità di tale decadimento cambia da sistema a sistema, ma a distanza di 1 m dal centro
dello scanner, il campo magnetico assume valori tipici di un centinaio di mT; a distanza di circa
4 metri dal magnete, il campo esibisce tipicamente valori dell’ordine di 0,5 mT. È importante
sottolineare come, a differenza del campo a radiofrequenza e dei campi di gradiente, che
vengono attivati solo durante l’esecuzione delle sequenze di imaging, il campo magnetico
statico sia sempre presente nella camera per MRI e tutte le persone che si muovono al suo
interno sperimentano il forte gradiente spaziale che si determina.
Il problema di interferenza da movimento nel campo statico diviene un problema di primo
ordine non tanto per il paziente portatore di DMIA candidato ad essere sottoposto a scansione
con MRI, quanto per il lavoratore portatore di pacemaker che si trova ad operare all’interno
della sala per MRI. Infatti, mentre nel primo caso, come già sottolineato in precedenza, è
possibile predisporre il paziente in modo tale che, nel breve periodo in cui sarà sottoposto a
scansione, il DMIA operi in una particolare modalità di funzionamento appropriata, questo non
è evidentemente possibile nel caso di lavoratore portatore di DMIA. Per il paziente sottoposto a
esame MRI esistono inoltre procedure di sicurezza che in ogni caso ne limitano la velocità di
movimento nell’intorno dello scanner, procedure che non possono essere sempre rispettate
anche dall’operatore.
9
Rapporti ISTISAN 13/40
2. PROGETTO E REALIZZAZIONE DEL SISTEMA
Il sistema per la rilevazione delle correnti indotte dai campi di gradiente sugli elettrocateteri
di pacemaker durante esami MRI è stato interamente progettato e realizzato all’interno del
Dipartimento di Tecnologia e Salute dell’Istituto Superiore di Sanità. Lo schema generale del
circuito prevede che il segnale di corrente venga prelevato attraverso una resistenza di misura,
per essere poi filtrato, amplificato e acquisito da un microcontrollore. Qui il segnale viene
convertito in forma digitale ed è trasmesso al di fuori dell’ambiente MRI, attraverso fibra ottica.
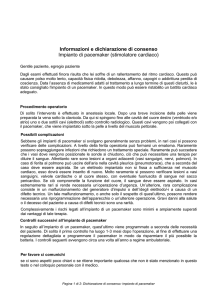
In Figura 6 è riportato lo schema a blocchi del sistema di misura. L’intero circuito è posto
all’interno di una scatola ermetica realizzata in PVC, che permette al sistema di poter essere
immerso nelle soluzioni saline tipicamente utilizzate per simulare i tessuti biologici negli studi
in vitro di compatibilità tra dispositivi impiantabili attivi e scanner per MRI.
Resistenza
di misura
PACEMAKER
Amplificatore
da strumentazione
Batteria a ioni
di litio amagnetica
Filtro anti-aliasing
Convertitore A/D
ELETTROCATERE
Circuito di ricarica
Filtro passa-basso
Trasmettitore/
Ricevitore ottico
Interno camera MRI
Esterno camera MRI
Scheda di acquisizione
Fibra ottica
Trasmettitore/
Ricevitore ottico
Connessione RS232
Figura 6. Schema a blocca del sistema per la rilevazione delle correnti indotte su elettrocateteri
di pacemaker dai campi di gradiente generati durante scansioni MRI
Il segnale trasmesso attraverso fibra ottica viene poi acquisito al di fuori della camera MRI
attraverso una scheda di acquisizione che converte il segnale ottico in segnale RS-232
compatibile, tale da poter essere inviato ad un PC attraverso porta seriale. Una interfaccia
realizzata in LabView (National Instrument, USA) permette infine di visualizzare in tempo
reale sul PC il segnale acquisito e di salvarlo per successive analisi ed elaborazioni.
In Figura 7 è riportato lo schema elettrico del circuito per la rilevazione delle correnti indotte
dai campi di gradiente. Nei paragrafi che seguono verranno descritte in dettaglio i blocchi che
compongono il circuito.
10
Riferimento di tensione
REF3020
Filtro passa-basso
Resistenza di misura
Filtro Anti-aliasing
Amplificatore da strumentazione
INA 327
Microcontrollore
PIC16F876
Fotodiodo
SD141
11
Batteria
Trasmettitore per fibra ottica
HFBR-1522
Connettore per
programmazione PIC
Rapporti ISTISAN 13/40
Figura 7. Schema circuitale del sistema per per la rilevazione delle correnti indotte su
elettrocateteri di pacemaker dai campi di gradiente generati durante scansioni MRI
Rapporti ISTISAN 13/40
2.1. Resistenza di misura
Il segnale di corrente è misurato a partire dalla caduta di tensione ai capi di una resistenza di
precisione (±1%) posizionata in serie tra il generatore di impulsi e l’elettrocatetere. Nella scelta
del valore di resistenza da utilizzare, è stata considerata la necessità di ottenere un rapporto
segnale-rumore sufficientemente elevato da permetterne la corretta interpretazione da parte del
sistema, ma, allo stesso tempo, tale da non alterare l’impedenza complessiva vista dallo
stimolatore. Partendo dalla resistenza equivalente dei tessuti tipicamente vista da un pacemaker
(500 Ω) e scegliendo 1 mA come valore minimo di corrente da voler misurare con sufficiente
risoluzione, è stata quindi scelta una resistenza con valore nominale di 20 Ω.
2.2. Filtro passa-basso
Il primo stadio di condizionamento incontrato dal segnale prelevato ai capi della resistenza di
misura consiste in un filtro passa-basso il cui scopo è quello di ridurre i contributi in alta
frequenza al segnale acquisito, in particolare quelli derivanti dal segnale pulsato a
radiofrequenza generato durante le scansioni MRI. Nei sistemi a 1,5 T, il campo RF è generato
alla frequenza di 64 MHz, mentre nei sistemi a 3 T, la radiofrequenza diviene 128 MHz. Il filtro
è un passa-basso del secondo ordine, ottenuto attraverso 2 celle RC in serie, bilanciato sulle due
linee di ingresso (Figura 8a). Per l’analisi della funzione di trasferimento le due resistenze di
ogni cella possono essere assimilate ad una sola resistenza del valore pari alla loro somma.
a
0
b
dB
-25
-50
-75
-100
1.0Hz
10kHz
100Hz
1.0MHz
70MHz
Frequenza
Figura 8. Schema elettrico del filtro passa-basso (a) e relativo diagramma di Bode (b)
a)
12
Rapporti ISTISAN 13/40
Il filtro realizza una attenuazione fuori banda di 40 dB/decade e, assumendo R2 >> R1, si
possono considerare indipendenti i poli generati dalle due reti R1 C1 e R2 C2 . La funzione di
trasferimento vale quindi:
1
1
VO
jC1 jC2
VI
1
1
R1
R2
j
C
j
C
1
2
In cui si è indicato con VO la tensione di uscita e con VIla tensione di ingresso; per il modulo
si ottiene:
VO
VI
1
C1C2
2
2
R1
1
1
2
R2 2 2
2
C1
C2
2
Pertanto, noto che la frequenza di taglio di un filtro realizzato con una singola cella RC vale:
1
2RC
fT
Scegliendo come valore della frequenza di taglio (-6 dB) 100 kHz, si ottiene:
fT 1 fT 2 100kHz
R2 10 R1
dove con fT1 e fT2 si sono indicate le frequenze di taglio delle due sezioni del filtro.
Si poi possono impostare i valori dei condensatori C1 e C2:
C1 1nF
C2
C1
100 pF
10
ottenendo così i valori resistivi per R1 e R2:
R1
R2
1
2f T 1C1
1
2f T 2 C 2
500
5k
I valori scelti di resistenza e capacità determinano un’attenuazione a 64 MHz superiore a 80
dB. Naturalmente a queste frequenze va posta particolare cura alla disposizione circuitale dei
componenti utilizzati, in quanto i disturbi possono interferire per irradiazione.
Nella banda di frequenza di interesse per la rilevazione del segnale indotto dai gradienti (110 kHz), invece, il guadagno del filtro può essere assunto unitario (Figura 8b).
13
Rapporti ISTISAN 13/40
2.3. Amplificatore per strumentazione
Il segnale in uscita dal filtro passa-basso per la radiofrequenza è poi amplificato attraverso
un amplificatore da strumentazione (INA327, Texas Instrument, USA). Le caratteristiche
principali di questo amplificatore sono l’ampia dinamica (rail-to-rail sia in ingresso che in
uscita) e la possibilità di essere alimentato attraverso una singola alimentazione. Quest’ultima
caratteristica è particolarmente importante perché permette l’utilizzo di una singola batteria per
l’alimentazione del circuito.
Poiché il segnale prelevato dalla resistenza di misura può assumere valori sia positivi che
negativi (la corrente indotta dai campi di gradiente può scorrere lungo l’elettrocatetere in
entrambe le direzioni), è necessario spostare l’ingresso dell’amplificatore ad un valore di riposo
positivo, diverso da 0. L’utilizzo di una singola alimentazione, infatti, con un potenziale di
ingresso a riposo pari a 0, non premetterebbe di acquisire la porzione negativa del segnale di
corrente. Se si suppone quindi che il segnale di interesse vari in modo simmetrico rispetto al suo
valor medio, l’ingresso dell’amplificatore deve essere spostato a circa la metà della dinamica
complessiva. Assumendo come tensione di alimentazione 3,7 V (valore compatibile con
l’alimentazione di tutti componenti del circuito), è stato utilizzato un riferimento di tensione di
2,048 V (REF3120, Texas Instrument, USA). La dinamica rail-to-rail in ingresso contribuisce a
ridurre i disturbi di modo comune sul segnale, così come in uscita permette di ottenere la
massima dinamica consentita dalla alimentazione.
Il guadagno dell’amplificatore è ottenuto in base al dimensionamento delle resistenze R1 ed
R2 mostrate in Figura 9. In particolare, il guadagno G è stabilito dalla relazione:
G 2
R1
150k
2
8
R1
39k
L’amplificatore INA327 ha anche la possibilità di lavorare in modalità a basso consumo (<5
µA): l’ingresso di enable dell’amplificatore è collegato al fotodiodo che riceve, attraverso la
fibra ottica, un segnale di wake-up esterno, che rimane attivo per tutto il tempo in cui si desidera
acquisire il segnale di interesse. A termine dell’acquisizione, il segnale di wake-up viene spento
e l’amplificatore entra in modalità a basso consumo, in modo tale da preservare il più possibile
la carica della batteria.
La scelta dell’amplificatore per strumentazione e il dimensionamento delle relative resistenze
di polarizzazione e delle alimentazioni è stata basata su alcune considerazioni relative alle correnti
in grado di generare cattura del miocardio. La possibilità per una corrente elettrica di stimolare e
indurre a contrazione il tessuto cardiaco dipende, infatti, dalla frequenza e dalla durata dello
stimolo. Alle frequenze tipiche dei campi di gradiente utilizzati in MRI (1-10 kHz) e per impulsi
dalla durata dell’ordine di qualche ms, è possibile ipotizzare la cattura del miocardio per correnti
superiori a pochi mA. Il sistema di rilevazione delle correnti indotte da gradiente deve pertanto
essere in grado di misurare correnti > 1 mA, che corrispondo a segnali in tensione ai capi della
resistenza di misura > 1 mV. L’amplificatore per strumentazione è in grado di lavorare
correttamente quando il segnale presentato ai sui ingressi (Vmax-Vmin) è compreso tra:
Vbatt
Vmin Vref
Vref Vmax Vbatt
dove Vbatt
e Vbatt
sono la tensione negativa e positiva di alimentazione e Vref la tensione di
riferimento ottenuta dal REF3120. Per il sistema in esame si ha:
0 V Vmin 2,048 V
2,048 V Vmax 3,7 V
14
Rapporti ISTISAN 13/40
R1 =39k
Segnale di wake-up
Riferimento di tensione
REF3120
R2 =150k
Figura 9. Schema circuitale e connessioni dell’amplificatore per strumentazione INA327
In base alle relazioni ora scritte, possiamo individuare il massimo intervallo consentito per il
segnale in corrente (Imax ÷ Imin), senza che questo venga distorto dall’amplificatore:
I min 102 mA
I max 83 mA
2.4. Filtro anti-aliasing
Tale filtro si rende necessario per evitare che, come affermato dal Teorema del
campionamento di Nyquist-Shannon, componenti del segnale in esame con frequenza superiore
alla metà della frequenza di campionamento del convertitore analogico-digitale possano
provocare distorsioni da sottocampionamento.
Nel sistema in esame la frequenza massima di campionamento è vincolata, oltre che dalle
prestazioni proprie del microprocessore utilizzato, anche dalla particolare tipologia di
trasmissione del segnale acquisito. Infatti, il segnale digitale risultante dalla conversione operata
dal microprocessore viene inviato al computer deputato alla visualizzazione dell’acquisizione
15
Rapporti ISTISAN 13/40
tramite una singola fibra ottica; questo determina la necessità di inviare i dati in forma seriale.
Come verrà descritto in dettaglio nel seguente paragrafo, la velocità standard massima
utilizzabile è risultata pari a 460.800 bit/s; considerando che la conversione ha una risoluzione
di 10 bit, si rende necessario l’invio di 2 byte per ogni campione. Considerando la lunghezza di
ogni byte (pari a 8 bit), l’inserimento dei bit di start e stop, nonché il tempo di elaborazione
intrinseco del microprocessore fra un campione e l’altro, si ottiene una velocità di
campionamento pari a circa 20 ksample/s. Da ciò deriva l’esigenza di limitare la banda del
segnale da acquisire alla frequenza di 10 kHz.
Il filtro anti-aliasing ha la stessa struttura del passa-basso utilizzato per eliminare la
radiofrequenza (Figura 10a): trattandosi di un passa basso passivo del 2° ordine, il filtro
utilizzato dispone di un’attenuazione fuori banda pari a 40 dB/decade; assumendo R2 >> R1 si
possono considerare indipendenti i poli generati dalle due reti R1 C1 e R2 C2. La funzione di
trasferimento vale quindi:
1
1
VO
jC1 jC2
VI
1
1
R1
R2
jC1
jC2
in cui si è indicato con VO la tensione di uscita e con VI la tensione di ingresso; il modulo del
rapporto tra tensione di uscita e tensione di ingresso è dato da:
VO
VI
1
C1C2
2
2
R1
1
1
2
R2 2 2
2
C1
C2
2
Pertanto, noto che la frequenza di taglio di un filtro realizzato con una singola cella RC vale:
fT
1
2RC
possiamo fissare la frequenza di taglio pari a 5 kHz:
fT 1 fT 2 5kHz
R2 10 R1
dove con fT1 e fT2 si sono indicate le frequenze di taglio delle due sezioni del filtro.
Possiamo poi impostare i valori dei condensatori C1 e C2:
C1 100nF
C2
C1
10nF
10
ottenendo i valori resistivi per R1 e R2:
R1
R2
1
333
2f T 1C1
1
2f T 2 C 2
16
3330
Rapporti ISTISAN 13/40
a
0
b
dB
-20
-40
-60
1.0Hz
10Hz
100Hz
1.0kHz
10kHz
100kHz
Frequenza
Figura 10. Schema elettrico del filtro anti-aliasing (a) e relativo diagramma di Bode (b)
Il diagramma di Bode relativo alla funzione di trasferimento del circuito così ottenuto è
mostrato nella Figura 10b. L’attenuazione introdotta alla frequenza di 10 kHz è pari a circa 14
dB (valore del modulo pari a circa 0,2), mentre si può considerare trascurabile fino alla
frequenza di 1 kHz; alla frequenza di taglio (5 kHz) l’attenuazione vale circa 6 dB.
2.5. Microcontrollore e conversione A/D
Il segnale analogico in uscita dal filtro anti-aliasing deve essere convertito in un segnale
digitale, per poter poi essere trasmesso, attraverso un’interfaccia di trasmissione/ricezione in
fibra ottica, al di fuori della camera di MRI, dove verrà acquisito, elaborato e memorizzato su
un PC, attraverso l’interfaccia seriale RS-232.
La conversione A/D del segnale e la sua codifica in forma RS-232 compatibile avvengono
all’interno di un microcontrollore, il PIC16f876 (Microchip). Il microcontrollore è in grado di
lavorare con un’alimentazione compresa tra i 2,0 e i 5,5 V; è dotato di un modulo a 5 canali per
la conversione A/D a 10 bit e di un modulo USART (Universal Sincronous Asyncronous
Receiver Trasmitter) per la trasmissione/ricezione dati su seriale RS-232. Per preservare la
carica della batteria, il microcontrollore può entrare nella modalità di funzionamento a basso
consumo (sleep mode), quando non deve compiere alcuna operazione, e può poi tornare alla
modalità di funzionamento normale in risposta ad un segnale inviato dall’esterno su un suo
17
Rapporti ISTISAN 13/40
particolare ingresso. In Figura 11 è riportato lo schema dei collegamenti in ingresso e in uscita
dal microcontrollore.
Segnale
Segnale
Connessioni per la programmazione
del microcontrollore
Modulo A/D
Interfaccia RS-232
Quarzo a 14.7456 MHz
Figura 11. Schema circuitale del microcontrollore PIC16f876
La programmazione del firmware del microcontrollore può essere effettuata direttamente sul
circuito, a componente montato, sfruttando gli ingressi ICSP (In-Circuit Serial Programming).
La stessa interfaccia permette anche di eseguire il codice in modalità di debug, così da verificare
e controllare il comportamento del sistema ad ogni singola istruzione.
La dinamica del convertitore A/D è compresa tra la tensione di batteria (limite superiore) e la
massa virtuale del sistema (limite inferiore). Prima di trasmettere il risultato della conversione
analogica del segnale all’interfaccia ottica, il microcontrollore genera un impulso a onda quadra
in cui il livello basso corrisponde alla tensione letta su di un ingresso del convertitore A/D
collegato a massa (RA2) e il livello alto è dato dall’uscita del riferimento di tensione a 2,05 V,
collegato su di un altro ingresso del convertitore (RA1). Quest’onda di calibrazione permette di
ricostruire il valore della tensione di batteria Vbatt, attraverso la relazione:
Vbatt
Vref 1024
,
Hl
dove Vref è la tensione di riferimento (2,05 V) e Hl il livello alto dell’impulso a onda quadra in
uscita dal convertitore.
Il rapporto:
Vref
Hl
definisce anche il fattore di conversione per esprimere in volt l’uscita del convertitore A/D.
La trasmissione su seriale RS-232 del dato convertito in digitale utilizza parole a 8 bit. Il
risultato di ogni singola conversione (a 10 bit) necessita quindi di 2 parole, per un totale di 16
bit. I bit non utilizzati nella conversione sono sfruttati per costruire una maschera di
trasmissione, utile per la decodifica del segnale e per la verifica della sua corretta ricezione. In
18
Rapporti ISTISAN 13/40
particolare, lo schema con cui ogni singolo dato in uscita dal convertitore viene codificato e
trasmesso è mostrato in Figura 12.
b7
b6
b5
b4
b3
b2
b1
b0
il dato convertito a 10 bit utilizza
tutti i bit di questo registro
Registro con i bit
più significativi
0
0
0
0
0
0
b9
b8
Convertitore A/D
Registro con i bit
meno significativi
il dato convertito a 10 bit utilizza
solo i primi 2 bit di questo registro
Maschera – bit di controllo
0
0
0
b4
b3
b2
b1
b0
Seconda parola
trasmessa
b7
b6
b5
1
1
1
b8
b9
USART
Prima parola
trasmessa
Maschera – bit di controllo
Figura 12. Schema di codifica del dato digitale per la trasmissione su seriale RS-232
Come già indicato in precedenza, la velocità di trasmissione dei dati su seriale è di 460800
bit/s. Per minimizzare il bit error rate (BER - rapporto tra i bit non ricevuti correttamente e i bit
trasmessi) a questa velocità di trasmissione, la frequenza del quarzo collegato al
microcontrollore è stata scelta pari a 14,7456 MHz (BER teorico per trasmissione a 460.800
bit/= 0. Per limitare il consumo della batteria, il microcontrollore entra in modalità di
funzionamento a basso consumo quando non deve compiere alcuna operazione. Il suo normale
funzionamento riprende in risposta ad una transizione di stato di un suo particolare ingresso
digitale (RB0) e permane sino a quando lo stesso ingresso è mantenuto nello stato alto; lo stato
basso dell’ingresso RB0 implica un immediato ritorno nella modalità di sleep. Il segnale di
controllo viene generato in funzione dell’apertura dell’interfaccia seriale per l’acquisizione del
segnale, a valle della fibra ottica. Ogni volta che la seriale viene aperta ed è pronta a ricevere i
dati, il segnale di controllo manda alto lo stato dell’ingresso RB0; viceversa non appena la
comunicazione viene chiusa, lo stato dell’ingresso viene portato sul livello basso.
In Figura 13 è riportato il digramma di flusso complessivo che descrive le operazioni
compiute dal microcontrollore.
La dinamica del modulo di conversione A/D del microcontrollore, limitata tra la tensione di
riferimento negativa del sistema (massa virtuale) e la tensione di batteria (3,7 V) determina il
massimo intervallo di corrente che può essere acquisto dal sistema senza distorsione. Partendo
dai valori di corrente massima e minima che possono essere applicati in ingresso
all’amplificatore per strumentazione (paragrafo 2.3), e considerando il guadagno pari a 8 scelto
19
Rapporti ISTISAN 13/40
Figura 13. Diagramma di flusso del firmware eseguito dal microcontrollore PIC16f876
20
Rapporti ISTISAN 13/40
per l’amplificatore stesso, l’intervallo di corrente in cui il sistema è in grado di lavorare
correttamente è:
I min 12,8 mA
I max 10,4 mA
Nel caso in cui fosse necessario aumentare tale intervallo di misura, è comunque possibile
ridurre il guadagno dell’amplificatore per strumentazione modificando le resistenze di
polarizzazione; nella condizione limite di guadagno unitario, si può far coincidere l’intervallo di
misura del sistema con quello valido per l’amplificatore per strumentazione (paragrafo 2.3).
La risoluzione del sistema si ottiene in funzione della dinamica del convertitore A/D, del
numero di bit del convertitore stesso e dal guadagno dell’amplificatore per strumentazione. In
particolare, le scelte progettuali adottate determinano una risoluzione complessiva δ pari a:
V
3,7 V
2
10
1
450 V
8
In termini di corrente, sulla resistenza di misura di 20 Ω, si ha:
I
450 V
20
1
22,5 A
8
2.6. Trasmettitore/ricevitore ottico
L’uscita USART del microcontrollore PIC16F876 controlla l’ingresso di un fotodiodo
trasmettitore montato all’interno di un connettore per fibra ottica (AFBR-1522, Avago
Technology, USA). In aggiunta alla linea di trasmissione deputata ad inviare il segnale digitale
al di fuori della camera per MRI attraverso fibra ottica, il sistema presuppone anche una linea di
ricezione per il segnale di wake-up del sistema: a tale scopo è stato utilizzato un fotodiodo
Darlington (SD1410, Honeywell, USA) montato all’interno di un alloggiamento che permette
l’accoppiamento del segnale luminoso con una connettore standard per fibra ottica. Il fotodiodo
converte il segnale luminoso in un segnale elettrico Transistor-Transistor Logic (TTL)
compatibile, che fa uscire dalla modalità a basso consumo sia il microcontrollore che
l’amplificatore per strumentazione (Figura 14).
Fotodiodo
SD141
Trasmettitore per fibra ottica
HFBR-1522
Figura 14. Schema circuitale del trasmettitore/ricevitore ottico
21
Rapporti ISTISAN 13/40
2.7. Circuito batteria
L’intero sistema è alimentato attraverso una singola batteria a polimeri di litio (PGEBNM053040, PowerStream Technology, USA), realizzata in materiale non ferromagnetico. La
batteria è estremamente leggera (11 g) e le sue dimensioni sono comparabili con quelle di un
pacemaker (5×30×50 mm). La sua tensione nominale è 3,7 V e la sua capacità è di 600 mA/h.
L’assenza di componenti ferromagnetiche la rende compatibile con l’ambiente MRI, anche
quando posta all’interno del bore dello scanner.
La batteria è alloggiata su di una basetta per circuiti stampati, al di sopra del circuito per la
rilevazione delle correnti indotte da gradiente ed è dotata di un circuito di ricarica che ne
permette la ricarica anche senza la necessità di rimuoverla dal sistema.
Al fine di monitorare costantemente lo stato di carica della batteria, due canali d’ingresso del
microcontrollore (diversi da quelli utilizzati per acquisire il segnale in corrente) sono stati
collegati al polo negativo della batteria (terra virtuale del sistema) e alla tensione di riferimento
di 2,048 V, generata dal REF3120. Prima di iniziare la conversione analogico-digitale, del
segnale acquisito dalla resistenza di misura, il microcontrollore genera un’onda quadra (Figura
15) che ha come livello più basso il valore di tensione letto all’ingresso connesso alla terra
virtuale e come livello più alto la tensione di riferimento a 2,048 V. La dinamica del modulo di
conversione A/D del microcontrollore è limitata in alto dalla tensione della batteria (3,7 V) e in
basso dalla terra virtuale. Ne consegue pertanto che l’onda quadra può essere utilizzata per
valutare il livello della batteria V batt , attraverso la relazione:
V batt
Vref 1024
HL
dove Vref è 2,048 V, 1024 il fondo scala del convertitore A/D a 10 bit e HL il livello dell’onda
quadra generato dal microcontrollore.
Il rapporto:
Vref
HL
Ampiezza
definisce anche il fattore di conversione unità di quantizzazione/tensione per esprimere in
termini di tensione (V) il segnale di corrente convertito in digitale.
600
550
500
450
400
350
300
250
200
150
100
50
0
HL
Vref = 2,048V
HL=555
2 ,048 × 1024
V +batt =
555
V
ref = 3,69
. mV / u .q.
HL
0
1000 2000
3000
4000
5000
6000
7000 8000 9000 10000 11000 12000 13000 14000 15000
Campioni
Figura 15. Onda di calibrazione per il monitoraggio dello stato di carica della batteria
22
Rapporti ISTISAN 13/40
2.8. Scheda di acquisizione
Il segnale di corrente acquisito e convertito in segnale luminoso viene portato al di fuori
della camera per MRI attraverso un cavo di 10 m in fibra ottica. Fuori dalla camera per MRI, il
segnale ottico viene nuovamente convertito in segnale elettrico grazie ad una ricevitore ottico
(AFBR-1522, Avago Technology, USA) e un traslatore di livello (SN65C3223E, Texas
Instrument, USA), che lo rende compatibile per le trasmissione su porta seriale RS-232. Sulla
stessa scheda di acquisizione è stato integrato anche un trasmettitore ottico (AFBR-2522, Avago
Technology, USA) attraverso cui viene generato il segnale di wake-up per attivare il circuito di
rilevazione delle correnti di gradiente. La scheda di acquisizione è alimentata da un alimentatore
standard a 12V ed è connessa con la porta seriarle RS-232 di un PC. Su quest’ultimo è installata
un’interfaccia software realizzata in LabView (National Instrument, USA) che permette di
visualizzare, analizzare e salvare i dati acquisiti dal sistema di misura e di generare il segnale di
wake-up che attiva il microcontrollore e l’amplificatore per strumentazione.
La fotografia di Figura 16 riporta la realizzazione finale del sistema di misura e ne evidenzia
le diverse componenti.
a
b
1. Batteria a ioni di litio
2. Fotodiodo/connettore per fibra ottica
3. Microcontrollore e amplificatore
4. Pacemaker ed elettrocatetere
5. Sistema di misura
6. Fibra ottica e scheda di acquisizione
Figura 16. Sistema di rilevazione delle correnti indotte da gradiente durante MRI:
circuito di misura (a) e sistema complessivo (b)
23
Rapporti ISTISAN 13/40
3. CARATTERIZZAZIONE METROLOGICA
E PROVE IN LABORATORIO
Prima di essere utilizzato in misure in vitro all’interno di scanner clinici per MRI; il sistema
di misura per la rilevazione delle correnti indotte da gradienti è stato testato e caratterizzato nei
laboratori del Dipartimento di Tecnologie e Salute dell’Istituto Superiore di Sanità.
3.1. Verifica della frequenza di campionamento
Le prime misure di caratterizzazione del sistema in laboratorio sono state dedicate alla verifica
dell’effettiva frequenza di campionamento con cui il sistema è in grado di acquisire e trasferire in
uscita dal microcontrollore il segnale di corrente letto ai capi della resistenza di misura.
Il calcolo della frequenza di campionamento deve tenere in conto non solo la velocità di
trasmissione attraverso l’interfaccia seriale ottica, ma anche i tempi necessari al
microcontrollore per completare la conversione A/D. Assumendo che questi ritardi siano
trascurabili, alla velocità di 460.800 bit/s corrisponderebbe una frequenza di campionamento
teorica di 23 kHz. Ogni singolo dato consta, infatti, di due parole da 8 bit, ognuna delle quali
caratterizzata da due bit aggiuntivi di start e stop, per un totale di 20 bit a dato. Per valutare
l’effetto dei tempi di ritardo dovuti al processo di conversione A/D, è stato posto in ingresso al
microcontrollore un segnale sinusoidale a frequenza nota (1 KHz). Il segnale, convertito e
trasmesso sull’interfaccia seriale, è stato poi acquisito e analizzato nel dominio della frequenza,
in termini di FFT (Fast Fourier Transform). Nel calcolo della FFT, la frequenza di
campionamento del segnale è stata lasciata come parametro libero (Figura 17).
2,5
a
2,4
Ampiezza (V)
2,3
2,2
2,1
2
1,9
1,8
1,7
1,6
0
1
2
3
4
5
6
7
8
9
10
b
0,18
Ampiezza (V^2/Hz)
Tempo (ms)
0,14
0,16
0,12
0,1
0,08
0,06
0,04
0,02
0
0
500
1000 1500 2000 2500 3000 3500 4000 4500 5000 5500 6000 6500 7000 7500 8000 8500 9000 9500 10000 10500
f =1000 Hz @ f.c. =20500 Hz
Frequenza (Hz)
Figura 17. Segnale sinusoidale (f = 1000 Hz) correttamente ricostruito nel dominio della frequenza
imponendo una f.c. pari a 20500 Hz: acquisizione nel dominio del tempo (a) e della frequenza (b)
24
Rapporti ISTISAN 13/40
Il valore reale della frequenza di campionamento propria del sistema è stato quindi stimato in
corrispondenza del valore per cui lo spettro del segnale presenta l’unica componente alla
frequenza dell’onda sinusoidale posta in ingresso al microcontrollore. La frequenza di
campionamento così stimata è risultata pari a 20,5 kHz.
3.2. Verifica delle massime e minime ampiezze
acquisibili
Dalla traccia acquisita in Figura 17 si può anche notare come, ad una ampiezza iniziale del
segnale sinusoidale applicato ai capi della resistenza di misura pari a 100 mV picco-picco,
corrisponda una segnale acquisito di ampiezza 800 mV picco-picco, con valor medio pari a
2,048V (tensione di riferimento dell’amplificatore per strumentazione). Ciò verifica il guadagno
complessivo del sistema, pari a 8.
La corrente che scorre lungo la resistenza può essere facilmente calcolata dividendo il valore
acquisito per il guadagno del sistema, in modo da risalire alla tensione prelevata ai capi della
resistenza di misura, e moltiplicando poi questa tensione per il valore delle resistenza di misura
stessa, pari a 20 Ω.
Prove successive sono state poi effettuate per varie ampiezze del segnale sinusoidale
applicato in ingresso al sistema. Come già indicato in precedenza, il valore più piccolo di
corrente, che, secondo le specifiche progettuali, il sistema deve essere in grado di rilevare con
sufficiente risoluzione è stato fissato pari ad 1 mA. Questa corrente corrisponde ad una tensione
ai capi della resistenza di misura pari a 20 mV. In Figura 18 è riportata proprio la traccia
acquisita con un segnale sinusoidale applicato ai capi della resistenza di ampiezza pari a 20 mV
e frequenza sempre 1 kHz.
a
2,14
2,12
Ampiezza (V)
2,1
2,08
2,06
2,04
2,02
2
1,98
1,96
0
1
2
3
4
5
6
7
8
9
10
Tempo (ms)
Ampiezza (V^2/Hz)
b
0,007
0,006
0,005
0,004
0,003
0,002
0,001
0
0
500
1000 1500 2000 2500 3000 3500 4000 4500 5000 5500 6000 6500 7000 7500 8000 8500 9000 9500 10000 10500
Frequenza (Hz)
Figura 18. Segnale sinusoidale (f = 1000 Hz) di ampiezza pari a 20 mV picco-picco correttamente
rilevato e ricostruito in frequenza senza distorsioni. In termini di corrente, il valore così rilevato
corrisponde a 1 mA: acquisizione nel dominio del tempo (a) e nel dominio della frequenza (b)
25
Rapporti ISTISAN 13/40
Il segnale acquisito risulta avere un’ampiezza di circa 160 mV picco-picco, coerentemente
con il guadagno di 8 caratteristico del sistema.
Il valore dell’unità di quantizzazione del convertitore analogico-digitale risulta essere pari a
circa 3,61 mV e, considerando sempre il guadagno di 8 del precedente stadio di amplificazione,
la minima tensione ai capi della resistenza di misura che il convertitore è in grado di
discriminare risulta pari a circa 450 µV. Il segnale di 20 mV risulta quindi ricostruito su circa 44
livelli.
L’analisi spettrale del segnale ricostruito, da cui si evince l’assenza di distorsioni armoniche
significative, dimostra che la risoluzione del convertitore è sufficiente per un riconoscimento del
segnale quando la corrente che scorre sulla resistenza di misura è di 1 mA.
Il massimo valore di corrente che il sistema è in grado di rilevare senza distorsioni è invece
sostanzialmente limitato dalla dinamica di ingresso del modulo di conversione analogicodigitale del microcontrollore.
In Figura 19 è riportata la traccia acquisita per il segnale sinusoidale a 1 kHz, con ampiezza
pari a 500 mV picco-picco. La traccia acquisita rileva una iniziale distorsione del segnale:
considerando infatti il guadagno di 8 dell’amplificatore per strumentazione, in ingresso al
microcontrollore verrà presentato un segnale con valore medio di 2,048 V e di ampiezza 4,0 V
picco-picco.
a
4
3,5
Ampiezza (V)
3
2,5
2
1,5
1
0,5
0
0
Ampiezza (V^2/Hz)
b
1
2
3
4
5
Tempo (ms)
6
7
8
9
10
4,5
4
3,5
3
2,5
2
1,5
1
0,5
0
0
500
1000 1500 2000 2500 3000 3500 4000 4500 5000 5500 6000 6500 7000 7500 8000 8500 9000 9500 10000 10500
Distorsione da terza armonica
Frequenza (Hz)
Figura 19. Segnale sinusoidale (f = 1000 Hz) di ampiezza pari a 800 mV picco-picco
con iniziale distorsione sulla semionda positiva (>2,048 V). In termini di corrente,
queste prime distorsoni compaiono per seganle di ampiezza ≥ 25 mA picco-picco:
acquisizione nel dominio del tempo (a) e nel dominio della frequenza (b)
La semionda negativa (< 2,048 V) risulta ancora compatibile con la dinamica del
microcontrollore (2,048 V – 2,0 V = 0,048 V), ma la semionda positiva (> 2,048 V) eccede il
limite superiore dato dalla tensione di batteria (2,048 V + 2,0 V = 4,048 V > 3,7 V).
26
Rapporti ISTISAN 13/40
Considerando il valore della resistenza di misura (20 Ω), la corrente per la quale si verificano i
fenomeni di distorsione evidenziati in Figura 19 è pari a 25 mA picco-picco.
3.3. Verifica della frequenza di taglio
La caratterizzazione in frequenza del sistema e in particolare lo studio della frequenza di
taglio bassa-basso realizzata dal sistema nel suo complesso è stata ottenuta applicando ai capi
della resistenza di misura un segnale ad ampiezza costante (pari a 100 mV picco-picco) e
frequenza variabile (da un minimo di 1 Hz ad un massimo di 10 kHz, con legge di variazione
esponenziale). I risultati ottenuti sono riportati in Figura 20.
a
3,25
3
Ampiezza (V)
2,75
2,5
2,25
2
1,75
1,5
1,25
1
0
1
2
3
4
5
6
7
8
9
10
11
Tempo (ms)
Ampiezza (V^2/Hz)
b
0,5
0,4
0,3
0,2
0,1
0
0
500
1000 1500 2000 2500 3000 3500 4000 4500 5000 5500 6000 6500 7000 7500 8000 8500 9000 9500 10000 10500
Frequenza (Hz)
Figura 20. Segnale sinusoidale di ampiezza pari a 60 mV picco-picco e frequenza variabile
(da 1 Hz a 10 kHz): acquisizione nel dominio del tempo (a) e nel dominio della frequenza (b)
Alla frequenza di 5 kHz, (frequenza di taglio del filtro anti-aliasing) si nota come i pochi
punti a disposizioni rendano difficile ricostruire il segnale acquisito (Figura 21): dal momento
che la conversione avviene ad una velocità di circa 20000 campioni al secondo, si hanno a
disposizione circa 4 campioni per ogni periodo del segnale in esame.
L’analisi spettrale rivela comunque la possibilità di riconoscere ancora correttamente il
segnale. Si nota inoltre come, sempre alla frequenza di 5 kHz, per una ampiezza del segnale pari
a 100 mV picco-picco, che alla frequenza di 1 kHz corrisponde ad una uscita di 800 mV piccopicco, il segnale risulti ora di ampiezza ridotta a circa 400 mV, dimostrando una attenuazione di
poco superiore ai 6 dB teorici, previsti in fase di progettazione del sistema.
27
Rapporti ISTISAN 13/40
a
2,15
2,125
Ampiezza (V)
2,1
2,075
2,05
2,025
2
1,975
1,95
1,925
0
Ampiezza (V^2/Hz)
b
1
2
3
4
5
Tempo (ms)
0,012
0,01
0,008
0,006
0,004
0,002
0
0
500
1000 1500 2000 2500 3000 3500 4000 4500 5000 5500 6000 6500 7000 7500 8000 8500 9000 9500 10000 10500
Frequenza (Hz)
Figura 21. Segnale sinusoidale di ampiezza pari a 60 mV picco-picco e frequenza variabile
pari a 5000 Hz: acquisizione nel dominio del tempo (a) e nel dominio della frequenza (b)
3.4. Acquisizione dell’impulso del pacemaker
Il circuito di rilevazione delle correnti indotte da gradiente durante MRI è stato progettato
per essere utilizzato durante misure in vitro, all’interno di simulatori di tronco, tipicamente
riempiti con soluzione salina ad una concertazione tale da riprodurre il comportamento
dielettrico dei tessuti, alle frequenza desiderate. Per rendere possibile tale utilizzo, Il circuito è
stato inserito all’interno di una scatola in PVC dotata di chiusura ermetica e di un foro per il
passaggio della fibra ottica, reso anch’esso ermetico mediante colla a caldo.
Il circuito è stato quindi connesso ad un pacemaker e al suo elettrocatetere (bipolare, di
lunghezza 58 cm) e posto all’interno di un contenitore rettangolare in plexiglass (28×20×26 cm),
riempito di soluzione salina (acqua distillata + NaCl), ad una concentrazione tale da ottenere una
conducibilità ad 1 kHz di 0,3 S/m. Tale valore riproduce, in media, il comportamento dei tessuti
alla frequenza tipica dei campi di gradiente utilizzati in MRI e realizza una impedenza vista dal
pacemaker tra il suo chassis e la punta dell’elettrocatetere di circa 500 Ω, valore tipico realizzato
anche negli impianti di pacemaker su pazienti. Una griglia in plexiglass è stata utilizzata per
fornire supporto al pacemaker, all’elettrocatetere e al circuito di misura e per posizionare
l’elettrocatetere in modo tale da formare una spirale attorno al pacemaker (Figura 22).
Il circuito di misura è posto in serie tra il terminale IS-1 dell’elettrodo distale
dell’elettrocatetere (tip) e il suo connettore sulla testa del pacemaker. In questa configurazione il
sistema è in grado misurare la corrente che il pacemaker eroga stimolando in modalità unipolare,
ovvero applicando una differenze di potenziale tra il suo chassis e la punta dell’elettrocatetere
(tip). Il pacemaker è stato quindi programmato in modalità unipolare (codice VOO che
corrisponde a stimolazione asincrona in ventricolo), alla frequenza di 60 battiti al minuto, con
impulsi di ampiezza 1 V e durata 1,5 ms. Come mostrato in Figura 23, il sistema è stato in grado
di rilevare correttamente gli impulsi erogati dal pacemaker e di ricostruirne ampiezza e durata.
28
Rapporti ISTISAN 13/40
f
d
b
c
e
a
Figura 22. Setup di prova per la misura dell’impulso del pacemaker:
circuito di misura (a); pacemaker (b); elettrocatetere (c); griglia di supporto (d);
simulatore di paziente (e); cavo in fibra ottica (f)
a
-1950
Ampiezza (mV)
-2000
-2050
-2100
-2150
-2200
-2250
-2300
0
0,2 0,4 0,6 0,8
1
1,2 1,4 1,6 1,8
2
2,2 2,4
2,6 2,8
3
3,2 3,4 3,6 3,8
4
4,2 4,4 4,6 4,8
5
Tempo (s)
-1950
Ampiezza (mV)
b
1,5 ms
-2000
-2050
-2100
-2150
-2200
300 mV
-2250
-2300
940 941 942 943 944 945 946 947 948 949 950 951 952 953 954 955 956 957 958 959 960 961 962 963 964 965 966 967 968 969 970
Tempo (ms)
Ampiezza (mV^2/Hz)
c
160000
140000
120000
100000
80000
60000
40000
20000
0
0
500 1000 1500 2000 2500 3000 3500 4000 4500 5000 5500 6000 6500 7000 7500 8000 8500 9000 9500 1000010500
Frequenza (Hz)
Figura 23. Impulsi generati da un pacemaker in un simulatore di paziente:
acqusizione nel dominio del tempo (a e b) e nel dominio della frequenza (c)
29
Rapporti ISTISAN 13/40
Gli impulsi registrati, infatti, hanno una ampiezza di circa 300 mV. Considerando il
guadagno di 8 del sistema, questo corrisponde ad una tensione letta ai capi della resistenza di
misura di circa 38 mV. La corrente erogata dallo stimolatore è quindi di 2 mA, che corrisponde,
assumendo pari a 500 Ω la resistenza offerta dalla soluzione salina che simula il corpo del
paziente, ad una tensione generata tra tip e chassis del pacemaker coincidente con il valore di
programmazione, scelto pari ad 1 V.
3.5. Prove di interferenza da campo magnetico variabile
Come ultima verifica sperimentale in laboratorio, il sistema di misura è stato sottoposto ad
un campo magnetico variabile nel range di frequenza tipicamente adottato dai campi di
gradiente generati durante esami MRI. Per ottenere questo campo, è stato utilizzato un
generatore di segnale (TTi TG1010A, Thurlby Thandar Instruments, Regno Unito) connesso ad
un amplificatore (TOE 7608, Toellner, Germania), ad un misuratore di corrente (TTi 1705,
Thurlby Thandar Instruments, Regno Unito) e infine ad una antenna a spire circolari multiple. Il
segnale è stato generato in forma sinusoidale, alla frequenza di 3 kHz. Per massimizzare il
campo magnetico generato dall’antenna a spire multiple, quest’ultima è stata realizzata in modo
tale da avere un elevato numero di spire e da massimizzare la corrente che, alla frequenza di 3
kHz, è possibile far scorrere al suo interno. Il campo magnetico generato da una antenna a spire
multiple lungo il suo asse passante per il centro delle spire (Bz) può essere infatti stimato dalla
relazione:
Bz
0 INa 2
2(a 2 r 2 )
3
2
dove µ0 è la permeabilità magnetica del vuoto (= 4π × 10-7 H/m), I la corrente che scorre nelle
spire, N il numero delle spire, a il raggio medio e r la distanza lungo l’asse dal centro della
antenna.
L’antenna è stata realizzata con 80 spire di diametro 30 cm, ottenute con filo di rame
rivestito di guaina isolante. Gli 80 avvolgimenti hanno determinato una induttanza complessiva
L di circa 350 µH. Per massimizzare la corrente in grado di scorrere lungo le spire, è necessario
portare l’antenna in risonanza alla frequenza di lavoro (ω0= 2π × 3 kHz) e compensare la
componete induttiva con una adeguata capacità C, data dalle relazione:
0
1
LC
C
1
L
2
0
1
8 F
(2 3 10 ) 350 10 6
3 2
La capacità richiesta è stata ottenuta grazie a 2 capacità di 3,3 µF e 4,7 µF poste in parallelo
tra di loro e in serie agli avvolgimenti dell’antenna. Sono state utilizzate capacità a basse
perdite, al fine di scongiurare eventuali rotture dei componenti causate dell’elevata intensità di
corrente che, in condizione di risonanza, può scorrere nell’antenna. Il circuito equivalente della
antenna così realizzata è mostrato in Figura 24a, assieme al modulo della sua funzione di
trasferimento (Figura 24b), che evidenzia il comportamento risonante alla frequenza di 3 kHz.
Alla massima amplificazione, il sistema di prova è in grado di far scorrere nella antenna, alla
frequenza di risonanza di 3 kHz, una corrente di circa 2 A. In queste condizioni, il campo
magnetico creato dall’antenna lungo il suo asse a pochi cm dal centro delle spire è di circa 5
mT. Questo valore è confrontabile con i valori tipici per i sistemi di gradienti degli scanner per
MRI attualmente in commercio, che vanno da 20 mT/m fino a 100 mT/m.
30
Rapporti ISTISAN 13/40
a
20
b
dB
0
-20
-40
-60
100Hz
300Hz
1.0kHz
3.0kHz
10kHz
Frequenza
Figura 24. Circuito equivalente dell’antenna utilizzata per generare un campo magnetico
variabile nel range di frequenza dei campi di gradiente utilizzati in MRI (a)
e modulo della sua funzione di trasferimento (b)
Una volta definito il sistema di esposizione, il circuito di misura delle correnti di gradiente è
stato connesso ad un pacemaker e al suo elettrocatetere e posizionato all’interno di un
simulatore di tronco con le stesse caratteristiche descritte nel precedente paragrafo. Sopra il
simulatore di tronco è stata quindi posizionata l’antenna e il segnale misurato dal circuito è stato
acquisito durante le generazione del campo magnetico variabile. In Figura 25 è riportata una
foto del setup sperimentale utilizzato.
Il campo magnetico variabile generato dall’antenna indurrà lungo la spira formata da
pacemaker, elettrocatetere e soluzione salina una forza elettromotrice (FEM) in accordo con la
legge di Faraday-Neumann-Lenz:
FEM =
B
con B B ds
t
S
dove θB è il flusso del campo magnetico B concatenato con la spira S lungo la quale si indice la
FEM.
31
Rapporti ISTISAN 13/40
a
c
e
b
d
Figura 25. Setup sperimentale per le prove di interferenza da campi magnetici variabili,
nel range di frequenza dei campi di gradiente per MRI: antenna a spire multiple (a);
condensatori di risonanza (b); pacemaker ed elettrocatetere (c); circuito di misura
posizionato sotto la griglia di supporto (d); simulatore di paziente (e)
Questa FEM indurrà a sua volta una corrente che scorrerà lungo l’elettrocatetere e quindi
lungo la resistenza di misura del sistema, posta tra elettrocatetere e connettore del pacemaker.
La Figura 26 mostra l’effetto del campo magnetico sull’impulso di corrente generato dal
pacemaker. L’ampiezza del segnale sinusoidale generato dal campo magnetico variabile letto
dal sistema è di circa 60 mV (picco-picco), corrispondente a 7,5 mV indotti sulla resistenza di
misura, ovvero 375 µA di corrente indotta lungo l’elettrocatetere. Il segnale risulta quindi vicino
al limite inferiore rilevabile dal convertitore a 10 bit del sistema di misura (risoluzione pari a
22,5 µA), ma comunque ancora ben distinguibile.
La traccia acquisita dal sistema evidenzia come, nonostante il campo magnetico variabile
fosse sempre attivo con intensità costante, il suo effetto risulti apprezzabile solo in determinati
intervalli. In particolare, il segnale sinusoidale compare simultaneamente allo stimolo erogato
dal pacemaker e si interrompe pochi ms dopo, a termine della fase di ricarica che ripristina la
neutralità elettrica dell’elettrodo. Questo comportamento è giustificato dalla diversa impedenza
che la corrente indotta dal campo magnetico variabile incontra nella spira formata da
pacemaker, elettrocatetere e soluzione salina, nelle due fasi di attività del pacemaker. Questo
infatti, nel suo normale funzionamento, alterna una fase in cui regista ed elabora l’attività
elettrica del cuore (intervallo di sensing) e una fase in cui, in funzione di ciò che è stato
registrato nell’intervallo di sensing, eroga o meno lo stimolo che induce le cellule del miocardio
a contrarsi (intervallo di pacing). Durante l’intervallo di sensing, il circuito di ingresso del
pacemaker è chiuso su di un’alta impedenza (~20 kΩ), che ne aumenta l’immunità a disturbi
esterni.
32
Rapporti ISTISAN 13/40
Ampiezza (mV)
a
2800
2600
2400
2200
2000
1800
1600
1400
1200
1000
800
0
200
400
600
800
b
1000
1200
1400
1600
1800
Tempo (ms)
2000
Intervallo
di pacing
Intervallo
di sensing
2200
2400
2600
2800
3000
3200
Intervallo
di sensing
Ampiezza (mV)
2800
2600
2400
2200
2000
1800
1600
1400
1200
1000
800
705 705,5706 706,5707 707,5708 708,5709 709,5710 710,5711 711,5712 712,5713 713,5714 714,5715 715,5716 716,5717 717,5718 718,5719 719,5720
Tempo (ms)
Campo magnetico variabile (3kHz)
Figura 26. Effetto del campo magnetico variabile a 3 kHz sull’attività del pacemaker:
acquisizione di tre impulsi generati dal pacemaker (a); ingrandimento si un singolo impulso (b)
(il disturbo compare nel solo intervallo di pacing, mentre nessun effetto si apprezza
durante l’intervallo di sensing)
Durante la fase di pacing, invece, se si rende necessaria l’erogazione dello stimolo, il
pacemaker commuta su di una impedenza di uscita molto più bassa (<1 Ω), che si mantiene per
tutta la durata dell’impulso e per la successiva fase di ripristino della neutralità dell’elettrodo.
La differenza di potenziale che si induce ai capi dell’elettrocatetere è in grado quindi di far
scorrere una corrente apprezzabile solo quando incontra la bassa impedenza caratteristica
dell’intervallo di pacing, mentre la stessa differenza di potenziale determina correnti non
apprezzabili quando il circuito di sensing del pacemaker è chiuso su di una alta impedenza.
33
Rapporti ISTISAN 13/40
4. PROTOCOLLO SPERIMENTALE
E PROVE IN RISONANZA MAGNETICA
Conclusa la fase di caratterizzazione e verifica in laboratorio, il sistema di rilevazione delle
correnti indotte dai campi di gradiente è stato testato in scanner clinici, con misure in vitro
condotte su simulatori di paziente. In particolare, un primo protocollo sperimentale è stato
messo a punto per valutare l’effetto dei campi di gradiente su di un paziente portatore di
pacemaker e sottoposto ad un esame di MRI.
Una seconda campagna di misura è stata poi condotta per valutare gli effetti che il campo
elettromagnetico presente in ambiente MRI ha su di un lavoratore portatore di pacemaker. In
questo caso, il sistema di rilevazione delle correnti è stato utilizzato non solo per misurare le
correnti indotte dai campi di gradiente su di un operatore sanitario presente all’interno della
camera per MRI durante l’esecuzione di una scansione, ma anche per valutare possibili
conseguenze dovute al movimento dell’operatore all’interno del campo statico. Il campo
magnetico statico all’interno della sala per MRI presenta, infatti, una forte disomogeneità
spaziale e il movimento al suo interno equivale a tutti gli effetti ad un campo magnetico
variabile (sia pur a frequenza molto più bassa rispetto quello dei campi di gradiente utilizzati per
l’imaging dei tessuti) che si concatena con l’impianto.
Nel disegno e nella realizzazione dei due protocolli sperimentali sono state tenute in
considerazione le profonde differenze che esistono tra i rischi derivanti dall’ambiente MRI per
un paziente portatore di pacemaker sottoposto ad indagine clinica e per un lavoratore portatore
di pacemaker che invece opera all’interno della stessa sala per MRI.
4.1. Valutazione delle correnti indotte dai campi
di gradiente sul paziente portatore di pacemaker
La valutazione in ambiente MRI delle correnti indotte dai campi di gradiente sul paziente
portatore di pacemaker è stata effettuata su di un dispositivo MR-conditional, ovvero un
dispositivo per il quale il fabbricante ha dimostrato l’assenza di rischio o quantomeno la
presenza di rischi accettabili associati all’esecuzione di esami MRI, in particolari condizioni di
utilizzo. Benché non tutte le condizioni poste dal fabbricante dell’impianto siano state rispettate,
il pacemaker è stato programmato in modalità asincrona (VOO, frequenza di 60 battiti per
minuto, impulsi di ampiezza di 1 V e durata 1,5 ms), in modo tale da prevenire eventuali
malfunzionamenti causati da sensing inappropriato durante la generazione del segnale di MRI.
Anche l’elettrocatetere utilizzato (bipolare, lunghezza pari a 58 cm) è stato scelto rispettando le
indicazioni fornite dal fabbricante sull’uso del dispositivo in ambiente MRI.
L’impianto è stato posizionato all’interno di un simulatore di paziente realizzato in accordo
con lo standard tecnico ASTM F2182-11 (17). Il simulatore è realizzato in plexiglass ed ha una
forma sostanzialmente rettangolare (42×65×9 cm) con una ulteriore elemento rettangolare più
piccolo (15×27×9 cm) su di un lato, a simulare la testa del paziente (Figura 27a). Il simulatore è
stato riempito con circa 25 l di soluzione salina, con conducibilità elettrica di 0,3 S/m, che
approssima, in media, quella dei tessuti umani alla frequenza di 1 kHz. Una griglia in PVC è
stata utilizzata per dare supporto all’impianto e al circuito di misura delle correnti. L’altezza
della griglia è stata fissata in modo tale da determinare una distanza tra l’impianto e la superficie
della soluzione salina di 1 cm.
34
Rapporti ISTISAN 13/40
a
b
Impianto
Griglia di supporto
Circuito di misura
Figura 27. Simulatore di paziente con pacemaker (a)
e posizionamento di impianto e circuito di misura (b)
Il circuito di misura è stato ancorato al di sotto della griglia, mentre pacemaker ed
elettrocatetere sono stati fissati sulla faccia superiore della griglia stessa (Figura 27b), con
l’elettrocatetere che forma una spirale attorno al pacemaker.
Le misure sono state effettuate presso l’ospedale Bambino Gesù di Roma, in uno scanner a
corpo intero a 3 T (Magnetom Skyra 3T, Siemens, Germania). Le condizioni di prova non
rientrano tra quelle che garantiscono la compatibilità dell’impianto in ambiente MRI: in
particolare, il pacemaker testato non è certificato come MR-conditional per scanner a 3 T e
35
Rapporti ISTISAN 13/40
anche l’esclusione della zona toracica dall’area di scansione non è stata rispettata (area di
scansione centrata rispetto alla posizione del pacemaker). Le condizioni di prova scelte
rappresentano quindi un caso peggiorativo rispetto a quelle previste dal fabbricante. L’intensità
di gradiente massima a cui opera lo scanner rientra invece entro i limiti indicati tra le condizioni
di MR-conditional (intensità massima dei gradienti = 180 T/(m/s)). L’attività del pacemaker è
stata acquisita dal sistema di misura durante l’esecuzione di una sequenza di Echo Planar
Imaging (EPI), modificata in modo da avere un tempo di ripetizione dei campi di gradiente il
più corto possibile (tempo di ripetizione TR= 2330 ms) e un Flip Angle il più piccolo possibile
(10°), in modo da limitare il contributo del segnale a radiofrequenza.
Il sistema si è dimostrato in grado di lavorare anche in presenza del forte campo magnetico
statico generato dallo scanner e di rilevare l’attività del pacemaker durante la scansione. I
risultati ottenuti in termini di corrente misurata dal sistema durante la prova sono riportati in
Figura 28.
a
0,8
Corrente (mA)
0,6
0,4
0,2
0,0
-0,2
-0,4
-0,6
-0,8
-1,0
-1,2
-1,4
-1,6
Intervallo
di sensing
0
0,5
1,0
1,5
Tempo (s)
b
2,0
2,5
3
0,8
Corrente (mA)
0,6
0,4
100 µV
0,2
0,0
500 µV
-0,2
-0,4
-0,6
Intervallo di sensing
Intervallo di pacing
-0,8
-1,0
-1,2
-1,4
-1,6
2005
2010
2015
2020
2025
Tempo (ms)
2030
2035
2040
Figura 28. Registrazione del segnale in corrente generato dal pacemaker
e acquisito durante la scansione (a); ingrandimento di un impulso generato
durante l’attivazione del campo di gradiente (b)
La traccia riportata in Figura 28 esprime direttamente la corrente misurata dal sistema. In
particolare l’impulso generato dal pacemaker determina una corrente lungo l’elettrocatetere di
circa 1,5 mA. Il valore è consistente con i parametri di programmazione del pacemaker
(ampiezza di stimolazione pari ad 1 V) e con una impedenza vista dal pacemaker di circa 500 Ω.
L’analisi dell’impulso erogato durante la sequenza di gradiente evidenzia come, analogamente a
quanto osservato nelle prove effettuate in laboratorio, un segnale apprezzabile sia indotto solo
36
Rapporti ISTISAN 13/40
durante l’intervallo di pacing, quando cioè il pacemaker commuta la sua impedenza di uscita su
valori dell’ordine dell’Ω per generare l’impulso di stimolazione e nel successivo intervallo di
ripristino della neutralità dell’elettrodo. Nell’intervallo di sensing, quando invece il pacemaker
presenta un impedenza di ingresso dell’ordine del kΩ, il segnale indotto dai campi di gradiente è
comparabile con il rumore di misura del sistema di acquisizione. Proprio per caratterizzare
questo rumore, successive misure sono state effettuate modificando l’impianto in modo da
isolare elettricamente, attraverso un rivestimento in silicone, la punta dell’elettrocatetere dalla
soluzione salina del simulatore di paziente. In tal modo viene impedito alla corrente di scorrere
lungo l’elettrocatetere e il segnale che si acquisisce fornisce una misura del rumore che si
induce sulle diverse componenti circuitali del sistema, che si sovrapporrà al segnale di corrente
utile che si intende misurare. I risultati di questa misura hanno evidenziato come il segnale
acquisito sia in effetti comparabile con quello registrato nell’intervallo di sensing, durante le
prove eseguite in assenza dell’isolamento elettrico tra elettrocatetere e soluzione salina (Figura
29).
a
Registrazione con elettrodo a contatto con la soluzione salina
0,6
0,4
0,2
Corrente (mA)
0,0
-0,2
-0,4
-0,6
-0,8
-1,0
-1,2
-1,4
-1,6
0
10
20
30
40
50
60
70
50
60
70
Tempo (ms)
b
Registrazione con elettrodo isolato dalla soluzione salina (corrente nulla)
0,6
0,4
0,2
Corrente (mA)
0,0
-0,2
-0,4
-0,6
-0,8
-1,0
-1,2
-1,4
-1,6
0
10
20
30
40
Tempo (ms)
Figura 29. Valutazione del rumore di misura: registrazione del segnale indotto sul sistema durante
la scansione MRI con l’elettrodo del pacemaker a contatto con la soluzione salina (a) e isolato da
un rivestimento di silicone, che non permette alla corrente di scorrere lungo l’elettrocatetere (b)
Nell’intervallo di pacing, invece, l’ampiezza delle correnti indotte che si sovrappongo a
quella erogata dallo stimolatore hanno una ampiezza di circa 500 µA, valore vicino alla soglia
di cattura propria delle cellule del miocardio (~ 1m A). Tale valore risulta sicuramente superiore
rispetto al limite di 10 µA tipicamente riconosciuto come limite oltre al quale esistono pericoli
di microshock per il paziente.
37
Rapporti ISTISAN 13/40
La contemporaneità con lo stimolo erogato dal pacemaker però rende queste correnti non in
grado di produrre effetti pericolosi. Anche il successivo intervallo in cui viene ripristinata la
neutralità elettrica dell’elettrodo di stimolazione ha una durata tipicamente compresa tra i 5 e i
10 ms, comunque inferiore al periodo di refrattarietà (>100 ms) che segue la stimolazione
indotta dal pacemaker, in cui le cellule del miocardio non sono in grado di produrre nuova
contrazione anche in presenza di stimoli sufficientemente ampi.
Un potenziale pericolo per il paziente è invece rappresentato dalla sovrapposizione delle
correnti indotte dai gradiente sull’impulso erogato dal pacemaker: come effetto di questa
sovrapposizione, il valore massimo raggiunto dall’impulso potrebbe essere portato sotto soglia e
quindi non essere più in grado di determinare la contrazione delle cellule cardiache. Dal
tracciato riportato in Figura 28 si può infatti notare come il segnale indotto dai gradiente (di
ampiezza picco-picco di circa 500 µA) possa, nel caso in cui la porzione negativa si
sovrapponga all’impulso generato allo stimolatore, ridurre l’ampiezza di quest’ultimo di più del
30%. Nei test effettuati, l’ampiezza dell’impulso è stata posta ad 1 V, valore tipico in condizioni
normali di stimolazione. Per minimizzare il rischio che il segnale prodotto dai campi di
gradiente durante una scansione MRI possa portare sotto soglia lo stimolo generato dal
pacemaker, la programmazione in modalità MRI dei dispositivi MR-conditional prevede invece
che lo stimolo venga erogato alla massima ampiezza possibile.
4.2. Valutazione delle interferenze da movimento
nel campo magnetico statico
Una seconda campagna di misure è stata effettata utilizzando il circuito di rilevazione delle
correnti per monitorare l’attività del pacemaker durante il movimento del lavoratore portatore di
pacemaker all’interno del campo magnetico statico presente nella camera per MRI. Come già
descritto nel Capitolo 1, la disomogeneità spaziale del campo statico che viene generato dai
sistemi per MRI rende equivalente il movimento al suo interno ad una esposizione ad un campo
magnetico lentamente variabile (dell’ordine di pochi Hz). Ne consegue, quindi, che la
variazione di campo magnetico concatenato con l’impianto può portare all’induzione di una
forza elettromotrice ai capi dell’elettrocatetere in grado di inficiare il corretto funzionamento
dello stimolatore. Il problema di interferenza da movimento nel campo statico è un problema di
primo ordine soprattutto per il lavoratore portatore di pacemaker che si trova ad operare
all’interno della sala per MRI. Infatti, per un lavoratore che opera all’interno di una sala per
MRI, non è possibile applicare le modalità di programmazione che invece rendono compatibili i
pacemaker MR-conditional con l’ambiente MRI. Inoltre, il campo statico risulta sempre
presente, anche quando non è in esecuzione alcuna scansione e tutte le persone che si muovono
al suo interno sperimentano il forte gradiente spaziale che si determina.
Proprio per valutare l’effetto del movimento nel campo statico su di un lavoratore portatore
di pacemaker, le misure sono state effettuate utilizzando lo stesso impianto testato nelle prove
su simulatore di paziente (paragrafo 4.1), ma non programmato in modalità asincrona. In
particolare, il pacemaker è stato programmato in VVI (sensing attivo) alla massima sensibilità
consentita dal dispositivo (1 mV), con pacing e sensing in unipolare e impulsi di ampiezza 3 V
e durata 1,5 ms. In modo analogo a quanto fatto nelle prove su simulatore di paziente, il
pacemaker, il circuito di misura e l’elettrocatetere sono stati fissati su in una griglia in PVC, con
però elettrocatetere disposto a formare una unica spira di area 225 cm2 (Figura 30a). Le scelte
del posizionamento dell’elettrocatetere, della programmazione alla sensibilità massima e del
sensing in unipolare nascono dalla volontà di effettuare test in condizioni di caso peggiore, in
38
Rapporti ISTISAN 13/40
termini di area di induzione lungo la quale si concatena il campo magnetico e di reazione al
segnale indotto. La griglia con l’impianto e il circuito di misura sono stati quindi inseriti
all’interno di un nuovo simulatore di paziente realizzato in forma antropomorfa e fissato
attraverso un perno ad un supporto su ruote, che ne permette il movimento sia traslazionale che
rotazionale (Figura 30b). Le misure sono state effettuate sempre presso l’ospedale pediatrico
Bambino Gesù a Roma, su un scanner a corpo intero a 3 T (Magnetom Skyra 3T, Siemens,
Germania).
a
b
Figura 30. Setup per la valutazione delle interferenze da movimento nel campo magnetico statico:
a) posizionamento del pacemaker e dell’elettrocatetere sulla griglia;
b) simulatore di lavoratore portatore di pacemaker dotato di un perno ad un supporto su ruote,
che ne permettono il movimento sia traslazionale che rotazionale
Per individuare i movimenti da far compiere al simulatore di lavoratore portatore di
pacemaker all’interno della sala per MRI, sono state eseguite misure preliminari per valutare
quale, tra i movimenti schematici che un operatore può compiere, fosse quello per cui si
determina una maggiore variazione di campo magnetico sperimentato dall’operatore stesso.
I movimenti schematici presi in considerazione sono stati il movimento traslazionale
dall’ingresso della sala per MRI verso il lettino per il paziente, un successivo movimento
traslazionale verso il bore dello scanner e un movimento rotazionale con il manichino
posizionato il più vicino possibile all’apertura centrale dello scanner.
Durante il movimento, il campo magnetico è stato registrato con una sonda di misura
triassiale ad effetto Hall (THM-1176, Metrolab Instrument SA, Svizzera), posizionata sullo
sterno dell’operatore e impostata per acquisire con un periodo di campionamento pari a 0,1 s e
risposta mediata su 10 campioni. Le misure raccolte hanno evidenziato come la più rapida
variazione di campo magnetico si verifichi per movimenti rotazionali nelle vicinanze del bore
dello scanner. Il protocollo di prova definito sulla base dei risultati ottenuti ha previsto quindi
39
Rapporti ISTISAN 13/40
che il simulatore di lavoratore portatore di pacemaker fosse inizialmente posizionato al di fuori
della sala per MRI e fosse poi portato verso lo scanner, fino ad arrivare al lato del lettino
paziente, adiacente alla apertura centrale dello scanner (Figura 31).
Figura 31. Posizionamento del simulatore di lavoratore portatore di pacemaker
accanto allo scanner per MRI. Il segnale del pacemaker unitamente al valore di campo magnetico
è stato registrato durante movimento rotazionale del simulatore,
effettuato con l’ausilio di personale volontario
In questa posizione, il movimento rotazionale è stato effettuato con l’ausilio di personale
volontario. La sonda per la misura del campo magnetico è stata utilizzata anche durante
l’acquisizione del segnale del pacemaker, in modo tale da poter correlare eventuali
malfunzionamenti del pacemaker ad una variazione misurata di campo magnetico. Per
sincronizzare le due tracce (acquisite su due PC diversi), una calamita è stata avvicinata alla
sonda di campo simultaneamente all’avvio e al termine della registrazione dell’attività del
pacemaker, prima di iniziare il movimento e a prova conclusa, naturalmente al di fuori della
stanza per MRI.
La Figura 32 riporta i risultati ottenuti durante una misura effettuata: i tracciati ottenuti
descrivono un iniziale movimento traslazione del simulatore di lavoratore verso l’apertura
centrale dello scanner durante il quale, anche a fronte di un incremento significativo dal campo
magnetico misurato dalla sonda, non si registra alcun effetto sull’attività del pacemaker.
Seguono poi due intervalli in cui il simulatore, dopo aver raggiunto l’apertura centrale dello
scanner, ha compiuto rapidi movimenti rotazionali, intervallati da una fase di riposo. Durante i
due intervalli, il tracciato acquisito con il circuito di misura evidenzia come l’attività del
pacemaker si arresti completamente, mostrando quindi una inibizione inappropriata. L’effetto
del movimento del simulatore e della conseguente variazione di campo magnetico sperimentata
dall’impianto risulta anche evidente dalla registrazione dell’elettrogramma interno fatta dal
pacemaker (Figura 32a): il movimento genera una tensione sullo stadio di ingresso del
pacemaker che viene interpretata come attività fisiologica spontanea e determina quindi
40
Rapporti ISTISAN 13/40
inibizione del dispositivo. Il secondo intervallo è seguito da una serie di movimenti rotazionali a
bassa velocità, che invece non determinano alcun effetto sul comportamento del pacemaker.
All’inizio e alla fine della traccia del campo magnetico di Figura 32 è possibile notare gli istanti
in cui la calamità è stata avvicinata alla sonda di misura del campo magnetico, che fungono da
riferimenti temporali per la sincronizzazione con il tracciato dell’attività del pacemaker.
a
Elettrogramma interno
registrato dal pacemaker
b
Inibizione inappropriata
2
1
Corrente (mA)
Attività pacemaker
0
-1
-2
-3
-4
-5
-6
-7
00:00:00
00:00:10
00:00:20
00:00:30
00:00:40
00:00:50
00:01:00
00:01:10
00:01:20
00:01:30
00:01:40
00:01:50
00:02:00
00:01:20
00:01:30
00:01:40
00:01:50
00:02:00
Tempo (hh:mm:ss)
c
Variazione campo magnetico
0,45
0,4
0,35
B0 (T)
0,3
0,25
0,2
0,15
0,1
0,05
0
00:00:00
00:00:10
00:00:20
00:00:30
00:00:40
00:00:50
00:01:00
00:01:10
Tempo (hh:mm:ss)
Figura 32. Inibizione inappropriata del pacemaker seguito del movimento rotazionale
del simulatore di lavoratore portatore di pacemaker all’interno dal campo magnetico statico:
dettaglio dell’elettrogramma interno registrato dal pacemaker in esame (a); attività del pacemaker
misurata con il sensore di corrente (b), sincronizzata rispetto alla misura del campo magnetico (c)
41
Rapporti ISTISAN 13/40
Il valore del campo magnetico riportato in Figura 32 è il modulo del campo magnetico
misurato dalla sonda triassiale. Se consideriamo invece la sola componete del campo
perpendicolare al piano dove è posizionato l’impianto (Figura 33a) e ne calcoliamo la derivata
temporale discreta (Figura 33b), possiamo anche stimare analiticamente la tensione che si è
indotta.
0,4
0,3
Bz (T)
0,2
0,1
0
-0,1
0
20
40
60
80
100
120
80
100
120
-0,2
-0,3
Tempo (s)
4
∆Bz/∆t (T/s)
3
2
1
0
-1 0
20
40
60
-2
-3
-4
Tempo (s)
Figura 33. Andamento della componente del campo magnetico lungo l’asse perpendicolare alla
spira descritta dall’impianto (pannello superiore) e sua derivata discreta nel tempo (∆t = 0,1 s)
Assumendo che il campo misurato dalla sonda, posta in prossimità del centro della spira
descritta dall’impianto, sia uniforme sull’intera spira, la tensione indotta si può stimare
semplificando la legge di Faraday-Neumann-Lenz nella forma:
B
FEM max z S
t
B z
approssima in forma discreta la derivata temporale dalla componente di campo
t
magnetico Bz perpendicolare alla spira (∆t = 0,1 s) e S la superficie della spira (S =225 cm2).
Considerando il periodo di campionamento della sonda (∆t = 0,1 s) e la superficie della spira
descritta dall’impianto (S =225 cm2) il calcolo ora descritto porta ad una stima della tensione
indotta di 80 mV. È importante sottolineare come questo valore di tensione non possa essere
confronto con il valore di sensibilità programmato per il pacemaker. Quest’ultimo, infatti, è
calcolato su uno stimolo con caratteristiche in frequenza molto diverse da quelle proprie del
segnale a bassa frequenza (pochi Hz) che si induce a seguito del movimento rotazionale del
simulatore nel campo statico.
dove
42
Rapporti ISTISAN 13/40
Dalla relazione ora scritta si intuisce anche il fondamentale contributo dato dalla superficie
della spira descritta da pacemaker, elettrocatetere e soluzione salina. Oltre al percorso compiuto
dall’elettrocatetere, il valore della superficie della spira può essere modificato cambiando i
parametri di programmazione del pacemaker: in particolare, se programmato in sensing
bipolare, senza modificare il percorso dell’elettrocatetere, la superficie della spira che
contribuisce all’induzione di tensione sullo stadio di ingresso del pacemaker si riduce di un
fattore pari a circa 20.
Come mostrato in Figura 34, infatti, in condizione di sensing unipolare, il pacemaker
acquisisce il segnale di attività cardiaca spontanea e anche ogni segnale interferente indotto
lungo l’elettrocatetere come la differenza di potenziale che si genera tra l’elettrodo in punta (tip)
e il suo chassis. In modalità bipolare, invece, il pacemaker utilizza due conduttori e preleva il
segnale come differenza di potenziale tra i due elettrodi presenti nella porzione terminale
dell’elettrocatetere (tip e ring), distanziati tra di loro di qualche cm. Nel caso in cui il circuito di
ingresso del pacemaker abbia una buona reiezione del modo comune (caratteristica propria della
maggior parte dei pacemaker in commercio), il contributo del segnale interferente indotto lungo
l’elettrocatetere si riduce alla solo differenza tra le aree di induzione viste dai due elettrodi tip e
ring.
a
b
pacemaker
c
elettrocatetere
tip
ring
Superficie di induzione per sensing unipolare
Superficie di induzione per sensing bipolare
Figura 34. Confronto tra le superficie di induzione in caso di sensing unipolare e bipolare
per diverse configurazioni della porzione terminale dell’elettrocatetere:
tip e ring obliqui rispetto alla congiungente con lo chassis del pacemaker (a);
tip e ring ortogonali rispetto alla congiungente con lo chassis del pacemaker (b);
tip e ring paralleli rispetto alla congiungente con lo chassis del pacemaker (c)
A conferma di quanto descritto, il movimento rotazionale che, in modalità di sensing
unipolare, aveva determinato l’inibizione inappropriata mostrata in Figura 32, è stato ripetuto in
condizione di sensing bipolare e nessun effetto significativo sul comportamento del pacemaker è
stato registrato.
4.3. Valutazione delle interferenze indotte dalla scansione
MRI sul lavoratore portatore di pacemaker
Una ultima sessione di misure è stata effettuata al fine di valutare le possibili interferenze
che si possono verificare sul simulatore di lavoratore portatore di pacemaker durante
l’esecuzione di una scansione MRI. La presenza di un operatore sanitario all’interno dalla sala
43
Rapporti ISTISAN 13/40
MRI durante l’esecuzione di una scansione non è un evento comune, ma che comunque si può
rendere necessario in determinate circostanze: esami su bambini sedati o su pazienti
anestetizzati richiedo, ad esempio, la presenza costante di personale medico durante l’intera
esecuzione dell’esame.
Le prove sono state condotte con l’impianto programmato nella stessa modalità utilizzata per
le prove di interferenza da movimento nel campo magnetico statico (VVI, massima sensibilità) e
anche la configurazione dell’elettrocatetere non è stata modificata (unica spira di 225 cm2). Il
simulatore di lavoratore è stato posizionato il più vicino possibile all’apertura centrale dello
scanner e l’attività del pacemaker è stata monitorata attraverso il circuito di misura delle correnti
durante l’esecuzione di una scansione MRI. In particolare è stata generata la stessa sequenza
con la quale era stata valutata la corrente indotta dai campi di gradiente sul simulator di paziente
(EPI, TR= 2330 ms), ma il flip angle è stato modificato in modo tale da avere un potenza a
radiofrequenza pari a 2 W/kg (valore massimo consentito in condizioni di standard di
scansione). Il tracciato acquisito non è evidenziato alcun effetto di rilievo: campo di gradiente e
campo a radiofrequenza sono confinati nella zona dove è presente il paziente, all’interno del
bore dello scanner. Per quanto l’operatore possa trovarsi nelle vicinanze delle bobine che
generano questi campi, la loro intensità risulta notevolmente più bassa rispetto a quella che
incide sul paziente e difficilmente può essere in grado di determinare effetti pericolosi per la
salute del lavorare portatore di pacemaker.
44
Rapporti ISTISAN 13/40
CONCLUSIONI
Il sistema di misura descritto nel presente rapporto rappresenta uno strumento di ricerca che
permette di ottenere informazioni qualitative e quantitative sulle correnti che si inducono lungo
elettrocateteri endocardici, durante test in vitro in ambiente MRI. Queste informazioni
rappresentano elementi fondamentali nel percorso verso la possibilità di effettuare esami MRI
su pazienti portatori di dispositivi medici impiantabili attivi, quali pacemaker, defibrillatori
impiantabili o neurostimolatori. Per i dispositivi di nuova generazione, certificati come MRconditional, gli attuali limiti sui valori massimi di campo di gradiente che, secondo le
indicazioni dei fabbricanti, non possono essere superati per non inficiare la condizione di
compatibilità con l’ambiente MRI, sono sostanzialmente basati su principi puramente
precauzionali e potrebbero essere rivisti e mitigati, alla luce dei risultati ottenibili con il sistema
di misura descritto.
Le misure effettuate all’interno di scanner clinici per MRI hanno verificato al capacità del
circuito di lavorare correttamente in un ambiente particolarmente ostile, dal punto di vista delle
possibili fonti di interferenza, come quello di una sala per MRI. I risultati raccolti nelle misure
in vitro su di un simulatore di paziente sottoposto a scansione hanno evidenziato come le
correnti che per colpa dei campi di gradiente si inducono lungo l’elettrocatetere di un pacemaker
possono raggiungere intensità vicine ai valori per i quali si determina la contrazione delle fibre
del miocardio solo durante l’intervallo di pacing dello stimolatore. Dal momento che tale
intervallo coincide per la sua intera durata con il periodo refrattario del cuore che segue lo
stimolo generato dal pacemaker, tali correnti indotte non rappresentano un rischio significativo
per il paziente. Più rilevante è invece il rischio che le correnti indotte da gradiente modifichino
l’ampiezza dello stimolo generato dal pacemaker, portandolo al di sotto del valore minimo di
cattura e quindi rendendo non più efficacie la stimolazione del tessuto cardiaco. Questo rischio
si aggiunge, per i pacemaker convenzionali ovvero quelli non certificati come MR-conditional,
al rischio di interferenza che i campi di gradiente possono indurre sul corretto funzionamento
del dispositivo (es. inibizione inappropriata, stimolazione asincrona in alta frequenza, ecc.). Per
i pacemaker di nuova generazione (MR-conditional) i rischi derivanti dai campi di gradiente
(interferenza e riduzione dell’impulso di stimolazione) sono mitigati da specifiche modalità di
programmazione, che devono essere impostate immediatamente prima dell’esecuzione
dell’esame MRI sul paziente e che disattivano la funzione di sensing e impostano l’ampiezza
dello stimolo generato dal dispositivo al massimo valore possibile.
Il circuito di misura delle correnti può essere anche impiegato per monitorare l’attività di un
pacemaker o di un simile dispositivo impiantabile all’interno dell’ambiente MRI, in modo da
valutare eventuali effetti interferenti indotti dai campi elettromagnetici generati dal sistema di
scansione sul funzionamento del dispositivo. In questa ottica, il sistema è stato utilizzato per
acquisire in tempo reale l’attività di un pacemaker durante movimento all’interno del campo
magnetico statico presente in una sala per MRI. Il sistema ha rilevato come, su dispositivi non
programmati in modalità compatibile con l’ambiente MRI, movimenti rapidi nell’intorno della
zona centrale dello scanner (dove il gradiente spaziale di campo magnetico statico è massimo)
inducano inibizione inappropriata dello stimolatore. Questo aspetto assume particolare
importanza nella valutazione dei rischi per il personale medico-sanitario portare di pacemaker o
simili dispositivi impiantabili attivi che si trova ad operare all’interno di una sala per MRI.
Infatti, mentre nel caso di paziente portatore di pacemaker, come già sottolineato in precedenza,
è possibile predisporre il paziente in modo tale che, nel breve periodo in cui sarà sottoposto a
scansione, lo stimolatore operi in una particolare modalità di funzionamento appropriata, questo
45
Rapporti ISTISAN 13/40
non è evidentemente possibile nel caso di lavoratore. Per il paziente sottoposto a esame MRI
esistono inoltre procedure di sicurezza che in ogni caso ne limitano la velocità di movimento
nell’intorno dello scanner, procedure che non possono essere sempre rispettate anche
dall’operatore.
46
Rapporti ISTISAN 13/40
BIBLIOGRAFIA
1. Luechinger R, Duru F, Scheidegger MB, Boesiger P, Candinas R. Force and torque effects of a 1.5Tesla MRI scanner on cardiac pacemakers and ICDs. Pacing Clin Electrophysiol 2001;24(2):199205.
2. Shellock FG, Tkach JA, Ruggieri pacemaker, Masaryk TJ. Cardiac pacemakers, ICDs, and loop
recorder: evaluation of translational attraction using conventional (“long-bore”) and “short-bore”
1.5- and 3.0-Tesla MR systems. J Cardiovasc Magn Reson 2003;5(2):387-97.
3. Naehle CP, Meyer C, Thomas D, Remerie S, Krautmacher C, Litt H, Luechinger R, Fimmers R,
Schild H, Sommer T. Safety of brain 3-T MR imaging with transmit-receive head coil in patients
with cardiac pacemakers: pilot prospective study with 51 examinations. Radiology 2008;249(3):9911001.
4. Luechinger R, Zeijlemaker VA, Pedersen EM, Mortensen P, Falk E, Duru F, Candinas R, Boesiger
P. In vivo heating of pacemaker leads during magnetic resonance imaging. Eur Heart J
2005;26(4):376-83.
5. Mattei E, Triventi M, Calcagnini G, Censi F, Kainz W, Mendoza G, Bassen HI, Bartolini P,
Complexity of MRI induced heating on metallic leads: Experimental measurements of 374
configurations. BioMedical Engineering OnLine 2008;7(1):11.
6. Bottomley PA, Kumar A, Edelstein WA, Allen JM, Karmarkar PV. Designing passive MRI-safe
implantable conducting leads with electrodes. Med Phys 2010;37(7):3828-43.
7. Mattei E, Calcagnini G, Censi F, Triventi M, Bartolini P. Numerical model for estimating RFinduced heating on a pacemaker implant during MRI: experimental validation. IEEE Trans Biomed
Eng 2010;57(8):2045-52.
8. Langman DA, Goldberg IB, Finn JP, Ennis DB. Pacemaker lead tip heating in abandoned and
pacemaker-attached leads at 1.5 Tesla MRI. J Magn Reson Imaging 2011;33(2):426-31.
9. Mattei E, Calcagnini G, Censi F, Triventi M, Bartolini P. Role of the lead structure in MRI-induced
heating: In vitro measurements on 30 commercial pacemaker/defibrillator leads. Magn Reson Med
2012;67(4):925-35.
10. Nordbeck P, Fidler F, Friedrich MT, Weiss I, Warmuth M, Gensler D, Herold V, Geistert W, Jakob
pacemaker, Ertl G, Ritter O, Ladd ME, Bauer WR, Quick HH. Reducing RF-related heating of
cardiac pacemaker leads in MRI: Implementation and experimental verification of practical design
changes. Magn Reson Med 2012 Mar 1. doi: 10.1002/mrm.24197.
11. Gimbel JR. Unexpected asystole during 3T magnetic resonance imaging of a pacemaker-dependent
patient with a ‘modern’ pacemaker. Europace 2009;11(9):1241-2.
12. Mollerus M, Albin G, Lipinski M, Lucca J. Ectopy in patients with permanent pacemakers and
implantable cardioverter-defibrillators undergoing an MRI scan. Pacing Clin Electrophysiol
2009;32(6):772-8.
13. Fontaine JM, Mohamed FB, Gottlieb C, Callans DJ, Marchlinski FE. Rapid ventricular pacing in a
pacemaker patient undergoing magnetic resonance imaging. Pacing Clin Electrophysiol
1998;21(6):1336-9.
14. Tandri H, Zviman MM, Wedan SR, Lloyd T, Berger RD, Halperin H. Determinants of gradient
field-induced current in a pacemaker lead system in a magnetic resonance imaging environment.
Heart Rhythm 2008;5(3):462-8.
15. Bassen HI, Mendoza GG. In-vitro mapping of E-fields induced near pacemaker leads by simulated
MR gradient fields. Biomed Eng Online 2009;8:39.
47
Rapporti ISTISAN 13/40
16. Bassen HI, Angelone LM. Evaluation of unintended electrical stimulation from MR gradient fields.
Front Biosci (Elite Ed) 2012;1(4):1731-42.
17. ASTM F2182-11. Standard test method for measurement of radio frequency induced heating on or
near passive implants during magnetic resonance imaging. West Conshohocken, PA: American
Society for Testing and Materials; 2011.
48
Stampato da Ugo Quintily SpA
Viale Enrico Ortolani 149/151, 00125 Roma
Roma, ottobre-dicembre 2013 (n. 4) 26° Suppl.