Ricerca di segnali gravitazionali da binarie in
coalescenza mediante una rete di rivelatori
interferometrici
Candidata: Simona Birindelli
Relatore: Andrea Viceré
5 ottobre 2004
Indice
1
Binarie coalescenti
9
1.1
Formazione di sistemi binari . . . . . . . . . . . . . . . . . . . .
9
1.2
Evoluzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11
1.2.1
Cenni sull’evoluzione di una singola stella . . . . . . . . .
11
1.2.2
Evoluzione di un sistema binario . . . . . . . . . . . . . .
15
1.2.3
Evoluzione all’interno di un ammasso . . . . . . . . . . .
25
Irraggiamento gravitazionale . . . . . . . . . . . . . . . . . . . .
28
1.3.1
Un po’ di storia...PSR B1916+13 . . . . . . . . . . . . .
28
1.3.2
Forma del segnale . . . . . . . . . . . . . . . . . . . . .
30
1.3.3
Approssimazioni successive . . . . . . . . . . . . . . . .
34
1.3.4
Tassi di coalescenze . . . . . . . . . . . . . . . . . . . .
36
1.3
2
I rivelatori interferometrici
39
2.1
Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
39
2.2
Interferometro di Michelson e Morley . . . . . . . . . . . . . . .
41
2.3
Principio di funzionamento di un interferometro gravitazionale . .
43
2.4
Schema di un rivelatore . . . . . . . . . . . . . . . . . . . . . . .
46
2.4.1
Masse in caduta libera . . . . . . . . . . . . . . . . . . .
46
2.4.2
Tragitto del fascio luminoso . . . . . . . . . . . . . . . .
47
Rumore . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
48
2.5.1
2.5.2
Rumore sismico . . . . . . . . . . . . . . . . . . . . . .
Fluttuazioni della gravità locale . . . . . . . . . . . . . .
49
49
2.5.3
Rumore termico . . . . . . . . . . . . . . . . . . . . . .
50
2.5.4
Shot noise . . . . . . . . . . . . . . . . . . . . . . . . . .
50
2.5
1
INDICE
2.6
3
2.5.5
Fluttuazioni della pressione di radiazione . . . . . . . . .
51
2.5.6
Instabilità del laser . . . . . . . . . . . . . . . . . . . . .
52
Sensibilità . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
52
Analisi mediante una rete di interferometri
55
3.1
Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
55
3.2
Cenni sull’analisi con un singolo rivelatore
. . . . . . . . . . . .
56
3.3
Analisi in coincidenza . . . . . . . . . . . . . . . . . . . . . . . .
58
3.3.1
Ricerca della coincidenza temporale . . . . . . . . . . . .
60
3.3.2
Consistenza delle ampiezze . . . . . . . . . . . . . . . .
61
3.3.3
Stime del fondo . . . . . . . . . . . . . . . . . . . . . . .
62
Analisi coerente . . . . . . . . . . . . . . . . . . . . . . . . . . .
63
3.4.1
Massimizzazioni analitiche . . . . . . . . . . . . . . . . .
65
3.4.2
Massimizzazione rispetto al tempo di coalescenza . . . . .
66
3.4.3
Griglia di parametri e determinazione delle incertezze . .
67
3.4
4
2
Confronto tra i due metodi
72
4.1
Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
72
4.2
Verifica della consistenza del programma . . . . . . . . . . . . .
73
4.3
Calcolo delle probabilità di rivelazione . . . . . . . . . . . . . . .
78
4.4
Risultati ottenuti . . . . . . . . . . . . . . . . . . . . . . . . . . .
79
4.4.1
LIGO . . . . . . . . . . . . . . . . . . . . . . . . . . . .
80
4.4.2
Virgo . . . . . . . . . . . . . . . . . . . . . . . . . . . .
82
4.4.3
Rete Virgo-LIGO . . . . . . . . . . . . . . . . . . . . . .
83
Distribuzione delle sorgenti nel cielo . . . . . . . . . . . . . . . .
86
4.5.1
Parametri che influenzano l’efficienza di un rivelatore . . .
89
4.6
Il futuro prossimo: Virgo e LIGO advanced . . . . . . . . . . . .
92
4.7
Accuratezza nella determinazione dei parametri . . . . . . . . . .
95
4.7.1
Parametri derivanti dalla fase: le masse . . . . . . . . . .
95
4.7.2
Parametri derivanti dall’ampiezza: la distanza . . . . . . .
97
Conclusioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
99
4.5
4.8
Introduzione
Questo lavoro si ripropone di analizzare i metodi per l’analisi dei dati provenienti
da interferometri gravitazionali operanti simultaneamente in cerca di segnali emessi da sistemi binari di oggetti compatti, al fine di facilitare la scelta della procedura
ottimale. L’elaborazione di una strategia per l’analisi di dati gravitazionali è importante sia dal punto di vista della Relatività Generale, che riscontrerebbe un’ulteriore
conferma, che dal punto di vista dell’Astrofisica: si aprirebbe infatti un nuovo canale osservativo, oltre a quelli elettromagnetico e dei neutrini, tra l’altro in molti
casi complementare al primo, considerato che gli oggetti compatti sono per lo più
invisibili per via elettromagnetica, a parte le pulsar. In particolar modo i sistemi
binari potrebbero essere usati come candele standard per la misurazione di distanze
astronomiche.
La tesi è suddivisa in quattro parti, strutturate nel modo seguente:
Il primo capitolo è dedicato alle sorgenti, delle quali viene fornita una breve
evoluzione in cui sono descritti i processi che portano alla formazione di sistemi
binari compatti. Questi sono oggetti interessanti per la rivelazione in quanto hanno
un quadrupolo gravitazionale che varia nel tempo, perciò sono destinati alla perdita
di energia sotto forma di irraggiamento gravitazionale. Un contributo rilevante al
bilancio energetico del sistema, tale da farne restringere sempre di più la propria
orbita fino alla coalescenza delle due stelle in tempi minori dell’età dell’Universo,
è possibile soltanto per oggetti molto compatti, quali le stelle di neutroni o i buchi
neri. Viene poi analizzata la forma del segnale gravitazionale, prevista dalla teoria
della Relatività Generale, e facilmente riconoscibile per la sua peculiarità di avere
frequenza ed ampiezza crescenti nel tempo; essa è conosciuta con buona approssimazione e questo consente di determinare con accuratezza i parametri del sistema
3
INDICE
4
una volta trovato un segnale.
Il capitolo successivo si occupa del metodo di rivelazione delle onde gravitazionali, la cui principale difficoltà è data dall’effetto che queste hanno sui corpi:
sono infatti perturbazioni della metrica che al proprio passaggio producono delle forze di marea oscillanti, per cui gli oggetti vengono deformati e le distanze
tra i corpi modificate. I rivelatori interferometrici, dei quali viene riportata una
breve descrizione, basano il loro funzionamento proprio su quest’ultima conseguenza, sfruttando l’ulteriore caratteristica delle onde di avere due polarizzazioni
sfasate tra loro di π4 , il che raddoppia l’effetto della deformazione agendo in modo
opposto su due direzioni ortogonali, che risulteranno l’una dilatata, l’altra contratta di un fattore proporzionale alla lunghezza originaria ed all’ampiezza dell’onda
(estremamente piccola, dell’ordine di 10
22 nelle
circostanze più favorevoli).
Segue una parte relativa all’introduzione dell’analisi dei dati, per la quale il metodo più efficace, vista la forte presenza di rumore, risulta il filtro adattato, una tecnica che permette di correlare i dati con un determinato modello teorico di segnale, sostanzialmente “facendolo scorrere” sulla sequenza temporale in uscita dallo
strumento, e variandone i parametri sino a trovare quello che più approssima l’eventuale segnale presente. Utilizzando un singolo rivelatore, però, la probabilità di
falsi allarmi non è una quantità trascurabile, ed inoltre non è possibile identificare
completamente la sorgente che emette, determinandone i parametri fondamentali
che la caratterizzano, tra i quali la distanza dall’osservatore, le masse delle stelle,
la loro separazione, e la posizione della sorgente nel cielo. Viene quindi descritto lo scenario osservativo che si presenta avendo a disposizione più interferometri
distribuiti in vari punti della superficie terrestre, per mezzo dei quali è possibile
effettuare una ricerca più precisa, sia dal punto di vista dell’aumento del rapporto
segnale-rumore complessivo, che da quello della determinazione dei parametri.
Il capitolo segue con l’introduzione e la descrizione delle due tecniche di analisi più efficienti: quella in coincidenza e quella coerente. Nella prima ciascun
rivelatore analizza i propri dati in cerca di segnali con il metodo del filtro adattato, e compila una lista di eventi candidati; le liste vengono confrontate per trovare
delle coincidenze: eventi di forma e ampiezza ragionevolmente simili e con gli opportuni ritardi dovuti alle posizioni relative. Questa procedura raffina la ricerca, in
quanto tende a ridurre sensibilmente il numero di falsi allarmi.
INDICE
5
Il metodo coerente invece consiste nel considerare la rete come un unico rivelatore posto in posizione opportuna, una sorta di sistema di centro di massa, e
sommare coerentemente i contributi di ciascuno strumento, pesati con la propria
sensibilità ed orientazione. I vantaggi di questa procedura sono l’aumento della sensibilità della rete rispetto a quella di un singolo rivelatore, con conseguente
crescita significativa del rapporto segnale-rumore. Quest’ultima quantità è legata all’energia accessibile ad uno strumento, e dato che essa diminuisce al crescere
della distanza, l’utilizzo di una rete permetterebbe l’ allargarsi dell’orizzonte osservabile per via gravitazionale. L’unico inconveniente è che non è adatto situazioni
in cui il rumore non sia totalmente gaussiano.
Introdotte tutte le quantità teoriche necessarie, il quarto capitolo è dedicato alla
descrizione del lavoro effettuato, che consiste in un parallelo tra i due metodi per
una rete composta da Virgo e dai tre LIGO, e per una dei rispettivi interferometri
perfezionati che entreranno in funzione alcuni anni dopo i primi, Virgo advanced ed i LIGO advanced; il programma elaborato mediante Mathematica permette
comunque di cambiare i componenti della rete a seconda delle esigenze.
La quantità rilevante per il paragone è la probabilità di rivelazione come funzione della distanza, che è una stima dell’ orizzonte osservabile per ogni coppia di
masse delle stelle, una volta fissata la soglia di probabilità a partire dalla quale si
ritiene significativa la presenza di un evento rispetto ai falsi allarmi. In prima approssimazione non ci sono direzioni privilegiate nel cielo per la ricerca di binarie
coalescenti -in realtà non è proprio così, infatti l’omogeneità dell’Universo è tale
solo su larga scala, per distanze dell’ordine delle decine di Megaparsec non è più
valida, ed inizia ad essere determinante la presenza di strutture- per cui le simulazioni sono state fatte creando artificialmente gli eventi con il metodo Monte Carlo
per i quattro parametri angolari (posizione, polarizzazione dell’onda e inclinazione
dell’orbita rispetto al piano di vista).
I calcoli delle probabilità di rivelazione sono stati effettuati nell’ipotesi di rumore completamente gaussiano, e la procedura di analisi ottimale è risultata quella
coerente, che permette di allargare visibilmente l’orizzonte gravitazionale. Tuttavia
la presenza di contributi non gaussiani al rumore non è trascurabile, ed il metodo
coerente non permette di filtrare i falsi allarmi causati da questi eventi. Il metodo
della ricerca in coincidenza risulta invece un buon compromesso: permette infatti
INDICE
6
di raggiungere distanze sufficientemente grandi (con una riduzione di circa il 25%
rispetto al caso coerente), e al tempo stesso elimina sensibilmente il numero di falsi
allarmi. A tale scopo sono stati effettuati due diversi filtraggi, il primo che selezionasse gli eventi compatibili ad almeno due rivelatori, ed un secondo, più rigido,
che considerasse unicamente le coincidenze di tre strumenti, in modo da eliminare
il più possibile gli eventi che non provengano da sorgenti gravitazionali.
Lo studio effettuato, utilizzando il metodo Monte Carlo con formule analitiche,
permette di stimare la sensibilità di una rete di rivelatori in diverse condizioni di
utilizzo. Il passo successivo sarà l’implementazione dei metodi di analisi affinché
possano venire applicati ai dati reali.
Le onde gravitazionali
Le equazioni di Einstein legano la forma dello spazio-tempo alla distribuzione di
materia ed energia all’interno di esso. Sono 10 equazioni differenziali del secondo ordine nella metrica, non lineari e non linearmente indipendenti (quest’ultima
caratteristica esprime l’invarianza della fisica sotto cambiamento di sistema di riferimento), per cui nella maggior parte dei casi non si trovano soluzioni esatte, ma
approssimate.
Nel vuoto, e ad una distanza da una distribuzione di massa sufficiente affinché
lo spazio-tempo possa essere considerato piatto trascurando l’eventuale curvatura dell’Universo, è possibile linearizzare le equazioni e calcolare gli effetti della
sorgente come una perturbazione allo spazio piatto minkowskiano:
gαβ
con hαβ
ηαβ
hαβ
(1)
1. Le equazioni linearizzate risultano:
hαβ
0
(2)
che ricordano molto le equazioni di Maxwell, anche nelle soluzioni:
hαβ
aαβ exp ikλ xλ (3)
dove aαβ in un particolare sistema di coordinate detto trasverso a traccia nulla
7
INDICE
8
assume la forma:
0 0
a
0
A
0 1
0
0 0
0 0
0
0
ax
1 0
0
0 0 1 0
A
0 0 0 0
0
0 1 0 0
(4)
0 0 0 0
Ovvero onde piane monocromatiche con due diverse polarizzazioni, che si propagano nello spazio (la parte temporale è nulla) alla velocità della luce. Le due polarizzazioni presentano uno sfasamento relativo di 45 , il che, come sarà illustrato
avanti, comporta un diverso effetto osservabile su due direzioni ortogonali.
Per stimare l’ordine di grandezza dell’ampiezza A, è necessario soffermarsi
sulle caratteristiche di una sorgente di questo tipo di onde. Anche nel caso gravitazionale, come in quello elettromagnetico, è possibile introdurre uno sviluppo in
multipoli, che è valido data la grande distanza dei generatori. Il primo termine non
nullo, però, non è quello di dipolo, in quanto p¨ ∑a ma r¨a 0 per la conservazione
della quantità di moto, ed analogamente µ¨ 1
2c
2
∑a ma dtd 2 ra va 0 per la conservazione del momento angolare. Resta quindi soltanto il termine di quadrupolo,
la cui definizione è
Qi j
∑ ma
a
xia xaj 1 2 ij
r δ
3 a
(5)
che dà una luminosità gravitazionale, ossia una potenza irraggiata pari a:
Lgrav
è necessario osservare che
G
5c5
G ...i j ...
Q Qi j 5c5 1 4 10
(6)
59 erg s 1 !
Risulta per questo evidente che soltanto sorgenti con un’ enorme derivata terza
del momento di quadrupolo possano essere osservabili, e che quindi i candidati
debbano essere oggetti astrofisici molto compatti ed in moto con grandi velocità:
pulsar o buchi neri con qualche asimmetria che ruotino vorticosamente, stelle che
collassino in modo anisotropo, oppure sistemi binari molto stretti di buchi neri o
stelle di neutroni.
Capitolo 1
Binarie coalescenti
1.1 Formazione di sistemi binari
Circa la metà delle stelle attualmente catalogate appartiene ad un sistema binario, una configurazione fortemente favorita dai processi di formazione stellare. Le
condizioni ideali per la nascita e lo sviluppo degli embrioni si creano nelle nubi
molecolari, composte di materia interstellare (prevalentemente idrogeno neutro)
estremamente rarefatta, a temperature dell’ordine delle decine di gradi Kelvin. Nel
cercare la sua configurazione di equilibrio, la nube comincia a collassare, in parte
frenata dalla rotazione, o dall’eventuale presenza di campi magnetici. Il collasso si
interrompe quando gli urti tra le particelle iniziano ad essere significativi, tali cioè
da contrastare l’energia gravitazionale della nube stessa. In questa fase nascono le
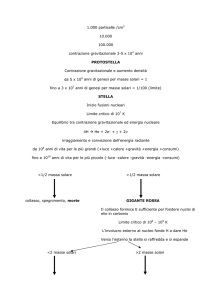
protostelle, frammenti di gas autogravitanti di densità intorno ai 10 2 103 g cm 3 .
In assenza di moti rotatori la materia si aggregherebbe in forma sferica, guidata
dalla ricerca di stabilità, ma in seguito alla frammentazione il momento angolare
della nube viene spartito tra le sue componenti, ed è necessario tenere conto della
rotazione. Per fluidi lievemente rotanti la configurazione di equilibrio è un ellissoide biassiale, al crescere del rapporto tra energia cinetica e gravitazionale le protostelle percorrono idealmente la cosiddetta sequenza di Mc Laurin, dopodiché la
struttura che minimizza l’energia diventa un ellissoide triassiale sempre più distorto
all’aumentare della rotazione (sequenza di Iacobi), sino a raggiungere la forma di
”manubrio”, progenitrice di un sistema binario [16].
9
CAPITOLO 1. BINARIE COALESCENTI
10
Dalla crisalide della nube si è formato un protoammasso stellare, che evolverà
con tempi caratteristici termodinamici per raggiungere l’equilibrio in quanto gas
di stelle (gli ammassi globulari che osserviamo oggi, “vecchi” circa 10 10 anni),
mentre ciascuna delle componenti, singole stelle o sistemi binari, progredirà con
tempi caratteristici dell’evoluzione stellare.
Nei processi di assestamento dell’ammasso, che da ”aperto”, senza una forma
definita, assumerà un aspetto sferico, saranno importanti le interazioni tra le stelle,
che potranno portare alla formazione di nuovi sistemi binari, o alla modifica sostanziale
di alcuni di essi.
CAPITOLO 1. BINARIE COALESCENTI
11
1.2 Evoluzione
1.2.1 Cenni sull’evoluzione di una singola stella
Una volta emersa la sua figura all’interno della nube, la protostella prosegue il
suo collasso verso la stabilità, che viene raggiunta con l’innesco delle reazioni di
fusione. Non appena queste sono in grado di sorreggere completamente la stella
garantendone l’equilibrio idrostatico ed energetico, essa può “entrare” nella sequenza principale del diagramma H-R della luminosità in funzione della temperatura. Le equazioni che descrivono ad ogni istante della sua vita la condizione della
stella sono le seguenti [15]:
dP r dr
dM r dr
dL r dr
dT
dr
"
"
GM r ρ r
r2
(1.1)
4πr2 ρ r (1.2)
4πr2 ρ r ε
(1.3)
3kρ r ! L r !
trasporto radiativo
4acT 3 4πr 2
T r ! dP r !
ad P r ! dr trasporto convettivo adiabatico (interni stellari)
T r ! dP r !
P r ! dr trasporto convettivo superadiabatico (superficie)
(1.4)
La prima governa l’equilibrio idrostatico, la seconda esprime la relazione che
lega massa e densità di materia, la successiva altro non è che la conservazione
dell’energia, dove ε è la quantità di energia prodotta per unità di tempo e di massa;
la quarta equazione, infine, determina il gradiente di temperatura in funzione del
raggio per i vari meccanismi di trasporto di energia all’interno della stella nell’approssimazione
di radiazione di corpo nero. Il primo ad essere messo in moto è il trasporto radiativo, legato al moto dei fotoni che si diffondono dalle zone più calde a quelle più
fredde. Quando però i flussi di energia da trasportare sono troppo elevati la materia non è in grado di reggere gradienti di temperatura arbitrariamente grandi, diviene meccanicamente instabile e si instaurano i moti convettivi. Questi ultimi
consistono in veri e propri spostamenti di elementi di materia stellare che non
trovandosi più in equilibrio termodinamico con l’ambiente circostante, si spostano
CAPITOLO 1. BINARIE COALESCENTI
12
trasportando così energia da un punto all’altro della stella. Lo stesso avverrà se
la materia ha un’elavata opacità (k), che come è possibile vedere dall’espressione
per il trasporto radiativo ha lo stesso effetto di un grande flusso di energia per il
gradiente di temperatura.
L’integrazione delle quattro equazioni per l’equilibrio stellare richiede, oltre
alla definizione di adeguate condizioni al contorno, la conoscenza di altre tre relazioni, nelle quali è contenuta la “microfisica” di una struttura stellare:
1. l’equazione di stato della materia che la costituisce;
2. l’espressione per la produzione di energia (per unità di tempo e di massa)
come funzione delle grandezze fisiche locali quali la densità, la temperatura,
la composizione chimica...
3. per il trasporto radiativo e conduttivo del calore, l’opacità della materia stellare.
La massa influenza pesantemente la vita del corpo autogravitante [6], infatti già
dall’instaurarsi della fusione di idrogeno si creano due classi distinte di stelle, che
differiscono anche morfologicamente: quelle più piccole, dette di sequenza principale inferiore (fino a 1 2 M # ), che bruciano idrogeno tramite la catena protoneprotone, e sono caratterizzate da un nucleo radiativo, dove avvengono le reazioni,
circondato da un inviluppo convettivo inerte; e quelle di massa maggiore, in grado
di raggiungere temperature centrali maggiori, tali da far risultare più efficiente la
fusione tramite il ciclo CNO (che sostanzialmente utilizza i tre elementi pesanti
come catalizzatori), e che a causa delle elevate temperature, hanno il centro convettivo, mentre l’inviluppo esterno è radiativo.
Le distinzioni tra stelle di massa diversa si fanno sempre più nette col passare
del tempo, all’esaurimento del primo combustibile al centro, infatti, ogni stella innesca la fusione di idrogeno in uno strato più esterno, sprigionando un’energia tale
da doversi espandere sino a 10 volte le sue dimensioni iniziali per poter ristabilire
l’equilibrio (fase di gigante rossa). Quando anche questo strato diviene inerte la
stella è costretta a contrarsi fino al raggiungimento, nel nucleo, delle condizioni
di pressione e temperatura necessarie all’innesco della fusione dell’elio, ma ciò
CAPITOLO 1. BINARIE COALESCENTI
13
avviene soltanto per masse sufficientemente grandi, con un nucleo di elio di almeno 0 $ 5 M # . Le stelline meno massicce (M 0 5 % 0 8 M # ) invece non riescono
a raggiungere tali temperature, e sono costrette a contrarsi ulteriormente sino a che
la materia non diventa degenere (ρ & 10 6 g cm 3 ). A questo punto la contrazione si
arresta, contrastata dalla pressione del gas di elettroni; nasce così una nana bianca,
un oggetto denso e compatto destinato allo spegnimento perenne.
Per le stelle in grado di bruciare elio, il procedimento a fisarmonica continua
con combustibili man mano più pesanti, mentre la massa compie la sua selezione
naturale ad ogni ciclo, creando nane bianche di carbonio-ossigeno, e nel caso di
stelle più massicce, esplosioni di supernovae. Più in dettaglio, al momento in cui il
nucleo è composto di carbonio ed ossigeno ed anche lo strato in cui bruciava elio si
è spento, le stelle meno massicce si contraggono per raggiungere le condizioni di
innesco della fusione di C. La contrazione fa sì che la materia del nucleo degeneri,
e che l’innesco della fusione avvenga in modo violento, si ha un’esplosione che
espelle tutti gli strati esterni della stella e sprigiona energie elevatissime, di luminosità dell’ordine di 1010 soli (supernova da deflagrazione del carbonio). Il nucleo
rimanente si spegne come nana bianca di ossigeno e neon.
Le stelle di massa maggiore innescano pacificamente la fusione, senza dover
contrarre il nucleo, e procedono con la sintesi degli elementi pesanti sino alla fine,
ovvero fino a che questa è energeticamente conveniente. Il ferro è infatti l’ultimo
prodotto di reazione per cui la fusione è un processo esoenergetico. Quando la
stella giunge quindi ad avere un nucleo di ferro e nichel, l’unica chance di produrre energia è data dalla contrazione. La prima conseguenza è la degenerazione
della materia nucleare, che però stavolta non basta ad arrestare il collasso, poiché la
massa del nucleo residuo supera il limite di Chandrasekhar per un gas di elettroni
degeneri (1 44 M # ), e ad un certo punto pressione e temperatura raggiungono valori così elevati che inizia ad essere energeticamente possibile e sempre più favorita,
la reazione β inversa:
p
e
('
n
νe
(1.5)
che dà il via al processo di neutronizzazione. Intanto nella parte più interna del
nucleo, che collassa omologamente (secondo una legge del tipo r t αr 0 ) a ve-
locità subsonica, si crea un’onda d’urto causata dall’accensione di alcune reazioni
CAPITOLO 1. BINARIE COALESCENTI
14
in ambiente degenere, questa si propaga attraverso la parte esterna che collassa
invece a velocità supersonica ed in modo non omologo, e con una forte esplosione espelle tutti gli strati esterni della stella. Al contempo il nucleo, superstite
all’esplosione, si neutronizza pressochè completamente, e a questo punto il destino della stella è segnato dalla propria massa: se questa aveva una massa iniziale
nell’intervallo 8 % 20 M # , il prodotto della neutronizzazione, che è un gas di neutroni degeneri, risulta una struttura autogravitante in grado di arrestare il collasso.
E’ nata una stella di neutroni, un oggetto estremamente denso (ρ ) 10 9 g cm 3 ) e
compatto (R ) 10 km).
Per masse iniziali al di sopra delle 20 M # 1 dopo l’esplosione si ha una parziale
ricaduta del materiale espulso sul nucleo, la cui quantità cresce linearmente con
la massa della progenitrice. Il valore massimo della massa dei resti è di 3 M # (una
stella di neutroni vicina al suo limite di Chandrasekhar) e si raggiunge per una
massa iniziale di 20 7 M # . A partire da masse iniziali di circa 25 M # c’è una leggera
diminuzione ed un successivo appiattimento nella relazione che lega la massa dei
resti a quella iniziale, ciò è dovuto al vento stellare, che diventa così efficace da
spazzare via completamente gli strati più esterni di idrogeno. Al crescere della
massa originaria, quindi, il vento solare agisce da catalizzatore inibitore all’effetto
di ricaduta delle parti espulse, in quanto alleggerisce la stella prima dell’esplosione,
rendendo la crescita della massa rimanente non più lineare rispetto a quella iniziale,
ma più lenta.
Oggetti in origine più massicci di 42 M # collassano direttamente a buchi neri
allo spegnimento delle ultime reazioni, senza subire alcuna esplosione. Questa
è una conseguenza della saturazione della ricaduta: a causa dell’enorme massa,
infatti, tutta la materia espulsa dall’onda d’urto collassa inesorabilmente sul nucleo.
Stelle nate al di sopra delle 48 M # raggiungono altissime luminosità ed attraversano uno stadio in cui perdono massa ad una velocità molto alta, e questo ha
due effetti che portano nella stessa direzione: in primo luogo, la perdita di massa
aumenta se la stella è più massiccia, per cui le masse dei nuclei sono sempre più
1
Purtroppo esistono ancora molte incertezze associate alla fisica dell’esplosione di una supernova, a causa dei complicati meccanismi idrodinamici che avvengono durante il collasso del nucleo,
per cui è possibile che usando diversi modelli vengano trovati risultati con differenze significative. Il
modello di evoluzione stellare qui preso come riferimento è quello elaborato da Hurley, Pols e Tout
[9].
CAPITOLO 1. BINARIE COALESCENTI
15
piccole; inoltre per masse più grandi la fase di variabile blu luminosa ha inizio
prima nella vita della stella, che viene privata di idrogeno, di conseguenza anche il
nucleo di elio che si forma è più piccolo, e così il nucleo residuo. Per cui le stelle
che attraversano la fase di variabile blu luminosa muoiono come quelle di massa
minore, con un’esplosione di supernova e una parziale ricaduta di materia sul nucleo. Secondo il modello standard di vento stellare, il minimo nucleo si forma per
una massa iniziale di 52 5 M # , al di sopra della quale esso riprende la sua crescita
con l’aumento della massa. Per masse iniziali superiori di 72 3 M # , infine, si genera nuovamente un buco nero tramite una ricaduta completa della materia espulsa,
senza esplosioni.
Riassumendo brevemente, a seconda della massa le stelle hanno una diversa
fine:
0 5 % 0 8 M #+* M
*
8 M#
nana bianca, sopra la massa solare supernova da defla-
grazione di carbonio, il cui nucleo diventa nana bianca
8 M#
M
*
20 M #
*
esplosione di supernova ed il nucleo rimanente (minore di
1,44 masse solari) è una stella di neutroni
20 M #
*
M
*
42 M #
esplosione di supernova con nucleo che collassa a buco nero
42 M #
*
M
*
48 M #
collasso a buco nero senza esplosione (il materiale ricade sul
nucleo)
48 M #
*
M
*
72 3 M #
esplosione di supernova con nucleo che collassa a buco
nero
M
*
72 3 M #
collasso a buco nero senza esplosione (il materiale ricade sul nu-
cleo)
1.2.2 Evoluzione di un sistema binario
La vita di un sistema binario è fortemente condizionata dalla separazione iniziale
tra le sue componenti. Se questa è elevata (dell’ordine di 10 5 , 6 R # ), è molto probabile che, a causa dell’interazione con le stelle “di campo” vicine nell’ammasso,
il legame si sciolga prima che avvenga qualsiasi fenomeno evolutivo.
CAPITOLO 1. BINARIE COALESCENTI
16
Se l’orbita è sufficientemente stretta da garantire l’esistenza del sistema stesso,
ma ancora piuttosto larga, ciascuna stella non sarà influenzata dalla presenza della
compagna, e procederà secondo l’evoluzione stellare standard per buona parte della
sua vita, almeno fino allo spegnimento delle reazioni di entrambe le componenti.
In ogni caso le interazoni mareali tenderanno a stabilire la circolarizzazione
dell’orbita, e la sincronizzazione tra periodo di rivoluzione e rotazione delle due
stelle, stato di minima energia. Il secondo processo, tramite la cessione di momento
angolare orbitale a quello rotazionale, ha come conseguenza il restringimento del
sistema, e, a seconda della separazione iniziale, può essere determinante per la sua
storia futura.
I meccanismi di circolarizzazione e sincronizzazione variano [9]: per sistemi
molto eccentrici anche il vento stellare può contribuire, ma la forma di dissipazione
più efficiente è legata alle forze mareali. Per stelle di sequenza principale inferiore pare che la causa principale delle instabilità mareali sia la viscosità turblenta
dell’inviluppo convettivo, fenomeno peraltro ancora poco conosciuto, mentre per
masse più grandi le cause scatenanti sembrano le oscillazioni del campo mareale
stesso.
I tempi caratteristici per la sincronizzazione e la circolarizzazione di stelle con
inviluppi radiativi sono generalmente ordini di grandezza maggiori rispetto a quelli
che caratterizzano l’equilibrio mareale delle stelle di sequenza principale superiore,
tuttavia entrambi risultano molto inferiori rispetto ai tempi evolutivi di una stella,
per cui è ragionevole considerarli fenomeni istantanei.
La circolarizzazione avviene quando le misure di una stella sono paragonabili
con la separazione del sistema:
R1
-
0 2 ap
(1.6)
dove a p è la distanza al periastro. Questa condizione è soddisfatta quando almeno
una delle due componenti evolve oltre la sequenza principale, oppure per sistemi
molto stretti. Non appena la relazione precedente è valida l’orbita si trasforma
conservando il momento angolare fino a che la nuova distanza al periastro diviene
pari a 5 raggi della stella più espansa, o fino alla circolarizzazione.
Se la separazione è minore di 104 raggi solari si avranno interazioni e scambio
CAPITOLO 1. BINARIE COALESCENTI
17
di massa tra le due componenti.
La presenza del sistema binario modifica lo spazio in sua prossimità, e nell’approssimazione di meccanica newtoniana e di orbite circolari, il potenziale in un
generico punto sarà dato da:
V x y z G
m1
r1
G
m2
r2
ω2
2
.
x
2
m2
m1
m2
a
y2 /
(1.7)
dove è stato scelto un sistema di riferimento corotante con il sistema stellare, con
origine nella componente primaria, e la secondaria sull’asse x come schematizzato
in figura. ω 10
m1 m2
a3
è la velocità angolare kepleriana di rivoluzione.
Sul piano dell’orbita le superfici equipotenziali hanno la forma mostrata nella
figura seguente:
CAPITOLO 1. BINARIE COALESCENTI
18
dove le due superfici chiuse tangenti in L 1 , punto singolare detto lagrangiano
interno, sono i Lobi di Roche, buche di potenziale pertinenti al campo individuale
di ciascuna stella, mentre i punti L 2 ed L3 sono le porte attraverso cui il sistema più
espellere materiale all’esterno.
Quando una delle componenti (generalmente la primaria, più massiva e di conseguenza più veloce nella sua evoluzione) espande il proprio raggio oltre il lobo
di Roche, inizierà a fluire materia verso la compagna attraverso L 1 . La risposta
del sistema a un fenomeno di trasferimento di massa dipende dalle fasi evolutive
e dalle masse delle due stelle, e gli scenari che si presentano a questo punto sono
molteplici [2].
Trasferimento dinamicamente stabile non conservativo. Si ha quando il donatore è una stella di sequenza principale e l’accettore in uno stadio qualunque della
sua evoluzione, oppure se il donatore è una gigante mentre la compagna non lo è,
e vale la relazione:
mdon
con cr
2
cr macc
(1.8)
2 5 o 1 a seconda dei casi.
Durante questa fase, parte della massa persa dalla primaria ( f a ) è trasferita alla
compagna, il resto viene perso dal sistema con un momento angolare specifico pari
CAPITOLO 1. BINARIE COALESCENTI
a
2π ja2
T
. La corrispondente separazione orbitale si modificherà secondo la formula:
af
ai
per fa
f
f
f
mdon macc
midon miacc
mdon
midon 4
3
2j 1
f
exp
.
2 j mdon midon miacc
/
(1.9)
0, mentre se è diverso da zero, si ha:
af
ai
f
e macc
19
f
miacc
f
mdon macc
midon miacc
3
f
mdon
midon 4
2 j 1 fa !
2
f
3
macc
miacc 4
2 faj 1 f a !
2
(1.10)
f fa midon mdon
. Secondo il modello standard la metà della massa
persa dalla primaria viene espulsa dal sistema, per cui j 1.
Il trasferimento di materia si interrompe quando per ciascuna componente il
lobo di Roche torna ad essere più largo del raggio della stella. Per stelle primarie evolute oltre la sequenza principale, il modello assume che esse perdano
completamente l’inviluppo e rimanga soltanto il nucleo di He o C-O.
Trasferimento di massa stabile conservativo. Questo caso è analogo al precedente, con la condizione f a
1 che corrosponde ad un trasferimento di massa
senza alcuna perdita da parte del sistema.
Trasferimento non stabile: inviluppo comune standard. Avviene quando la
stella primaria è in fase di gigante, mentre la compagna può essere in sequenza
principale, o una nana bianca, o anch’essa una gigante ricca di He e non viene
soddisfatta la condizione 1.8. In queste condizioni il trasferimento non è stabile, e
passa attraverso una fase di inviluppo comune, durante la quale entrambe le stelle
riempiono il proprio lobo di Roche e necessariamente fluirà materia verso l’esterno
tramite i punti lagrangiani secondari, a spese dell’energia orbitale del sistema, che
di conseguenza diventerà molto stretto. La separazione finale può essere calcolata
tramite la relazione:
f
αce
3
Gmdon macc
2a f
Gmidon macc
2ai
4
Gmidon mdon 5 inv
λRdon 5 lr
(1.11)
dove mdon 5 inv è la massa dell’inviluppo della stella primaria, R don 5 lr il raggio del suo
lobo di Roche, λ un parametro tale cheλ α ce
1. Il membro a destra dell’equa-
CAPITOLO 1. BINARIE COALESCENTI
20
zione rappresenta l’energia di legame dell’inviluppo della stella donatrice, mentre
il lato destro esprime la differenza tra le energie orbitali finale e iniziale, ed α ce
l’efficienza con la quale il processo strappa via l’inviluppo alla stella.
Trasferimento non stabile: doppio inviluppo comune. Se le due componenti
sono entrambe giganti con inviluppi convettivi ed è in atto un trasferimento di
massa è possibile che si formi una fase di inviluppo comune doppio, in cui i due
nuclei spiraleggiano nella fusione dei due inviluppi. Come nel caso precedente,
è possibile scrivere una relazione tra le energie utile per calcolare la separazione
finale:
f
f
Gm1 m2
2a f
αce
3
Gmi1 mi2
2ai 4
Gmi1 mi1 5 inv
λR1 5 lr
Gmi2 mi2 5 inv
(1.12)
λR2 5 lr
con le stesse notazioni.
Fase di inviluppo comune con accrescimento ipercritico. Se una delle stelle è un
buco nero o una stella di neutroni è possibile giungere ad una fase di inviluppo
comune soltanto se la separazione diviene uguale al raggio della gigante che cede
materia. In queste condizioni l’oggetto compatto strappa una quantità significativa
di massa alla compagna tramite un accrescimento ipercritico. Il risultato finale (la
massa accumulata e la nuova distanza) viene calcolato come soluzione numerica
delle equazioni differenziali:
m1 m2 6 6 m1 m2 m2 7 1 2λ 1 αce1 2m2 m2 5 nucl m1
m1 m22 a 1 6 6 m1 m2 m2 7 1 m2 a 1 6 m1 2λ 1 αce1 m2 m2 5 nucl 7
(1.13)
da
dm2
dm1
dm2
m1 6 6 m 1
m2 1
m2 7
1
1 m2 a
m1 m2 6 6 m1 m2 m2 7 1 2λ 1 αce1 2m2 m2 5 nucl m1
m1 m22 a 1 6 6 m1 m2 m2 7 1 m2 a 1 6 m1 2λ 1 αce1 m2 m2 5 nucl 98
7;:
(1.14)
ottenute imponedo il bilancio dell’energia durante la fase di inviluppo comune
αce ∆Eorb
∆Eleg .
Cronologicamente, un primo episodio di incontro ravvicinato può avvenire già
CAPITOLO 1. BINARIE COALESCENTI
21
in fase finale di sequenza principale della primaria, se il sistema è sufficientemente
stretto. In questo caso gli effetti evolutivi, che in questa fase portano ad un aumento
del raggio, si manifestano su tempi scala più lunghi di quelli del riaggiustamento
strutturale su raggi minori indotto dalla diminuzione di massa, perciò il trasferimento sarà stazionario e stabile per lungo tempo. Infatti per queste strutture il
riassestamento avviene su tempi scala dell’ordine del tempo di Kelvin:
tk
Eth
L1
3 Gm21
4 L1 R1
(1.15)
il quale indica quanto impiegherebbe una stella ad irraggiare tutta l’energia termica
a sua disposizione se non potesse più produrne in alcun modo, e la seconda uguaglianza vale solamente nella fase di sequenza principale e nell’ipotesi di simmetria
sferica. Il tempo scala per il trasferimento di massa è invece circa un ordine di
grandezza al di sopra, per cui in questo stadio ad una diminuzione di massa segue una diminuzione di raggio della stella, ed il trasferimento sarà stazionario. La
compagna su cui cade materia si vede depositare un’energia pari a:
Lgrav
Gm2 ṁ1
R2
(1.16)
Esiste tuttavia un limite fisico alla luminosità che una struttura stellare può emettere
senza che gli strati esterni diventino gravitazionalmente slegati, detto luminosità di
Eddington:
LEdd
4πcR
ke
(1.17)
dove ke è l’opacità superficiale.
Confrontando le due espressioni si ottiene una relazione per il tasso di accrescimento limite, oltre il quale la materia trasferita dalla primaria non è accettata
dalla compagna, e viene persa dal sistema:
ṁEdd
4πcR
ke
10
4
R
M #=< anno
ke
(1.18)
Quindi è la velocità di trasferimento che decide se esso sia conservativo o meno.
Un trasferimento cessa di essere stazionario quando viene a mancare la condizione che lo ha determinato, ovvero la risposta strutturale di diminuire il raggio ad
CAPITOLO 1. BINARIE COALESCENTI
22
una diminuzione di massa, oppure nel caso in cui le dimensioni del lobo di Roche
varino su tempi scala inferiori a quelli di riaggiustamento strutturale. In generale
la stazionarietà viene persa prima del raggiungimento della fase di gigante rossa da
parte della primaria.
Se il sistema è inizialmente più largo (a > 10 2 % 103 R # ), il primo contatto avviene quando la stella di massa maggiore è in fase di gigante. In questi casi le
proprietà fisiche dei profondi inviluppi convettivi sono tali da indurre un aumento
di raggio ad una diminuzione di massa, per cui l’aumento del raggio è positivamente reazionato dalla perdita di massa attraverso il punto lagrangiano interno e l’unico
freno ad un processo a valanga è costituito dall’inerzia della struttura a riaggiustarsi su raggi maggiori. Date condizioni iniziali portano il sistema a sperimentare una
fase di inviluppo comune, perché la secondaria accetta materiale soltanto fino a
che il tasso di trasferimento è entro il limite di Eddington, dopodiché la massa in
eccesso comincia a riempire il lobo di Roche della secondaria, e successivamente
anche i volumi contenuti dalle superfici equipotenziali esterne. L’espansione dell’inviluppo comune si arresta solamente quando viene raggiunta la prima superficie
critica singolare nel primo punto lagrangiano esterno, da cui potrà finalmente fluire
verso l’esterno.
Il trasferimento avviene su tempi scala termici, molto più brevi rispetto a quelli del caso stazionario, e si arresta solamente quando gran parte dell’inviluppo è
stato ceduto e della primaria non rimane che un nucleo circondato da un piccolo
inviluppo radiativo (pochi decimi di massa solare). E’ anche possibile, sebbene
meno probabile, che il trasferimento abbia termine perché la struttura recede dalle
condizioni espanse per motivi evolutivi (innesco di una nuova fusione centrale).
Alcuni aspetti evolutivi di un sistema binario immerso in un inviluppo comune
non sono ancora noti con precisione, tuttavia sicuramente il fatto che le componenti
stellari si muovano in un mezzo di densità non trascurabile determina l’insorgere di
attriti. Questi faranno sì che le orbite si restringano a causa della perdita di energia,
per cui il sistema che emerge da una fase di inviluppo comune risulta più legato di
quello originario.
Una coppia di stelle nel corso della sua esistenza può passare attraverso più
fasi di inviluppo comune, a seconda della separazione, delle masse, e di altre
caratteristiche del sistema stesso.
CAPITOLO 1. BINARIE COALESCENTI
23
Se entrambe le componenti sono poco massicce, dopo un primo episodio di
inviluppo comune la primaria è ridotta ad una nana (di He o di C-O a seconda della fase in cui è avvenuto il trasferimento di materia) in fase di raffreddamento, il
rapporto di masse è invertito, e, visto che l’orbita è più stretta, sicuramente avverrà
un nuovo scambio di materia. Quando la separazione è sufficientemente piccola
da far riempire il lobo di Roche della secondaria alla fine della sequenza principale, il trasferimento sarà conservativo, altrimenti si giungerà ad un nuovo stadio
di inviluppo comune. A seconda delle fasi evolutive delle stelle al momento dei
trasferimenti, potranno avvenire o meno nuovi scambi di massa, lo scanario che si
presenterà alla fine di questi, sarà tuttavia in ogni caso un sistema di nane molto
stretto (separazione dell’ordine di qualche raggio solare).
Stelle di massa maggiore attraversano una fase nella quale si scambiano materia in modo dipendente dalla separazione iniziale, dopodichè, quando una delle
due giunge al punto di dover esplodere come supernova, il destino del sistema è
nuovamente determinato dalla distanza tra di esse prima dell’evento. Se le due
componenti non erano sufficientemente legate il sistema viene distrutto e le stelle
continuano ciascuna la propria esistenza individualmente, altrimenti il risultato finale è un sistema più largo, con i rapporti di massa scambiati. La materia espulsa
dalla supernova non interagisce con la compagna, ma viene immediatamente persa
attraverso i punti lagrangiani. A questo punto la primaria è una stella di neutroni
o un buco nero, a seconda della sua massa iniziale, mentre la secondaria, procede
nella sua evoluzione, durante la quale è possibile che conduca il sistema verso una
seconda fase di inviluppo comune prima di espoldere anch’essa come supernova o
di morire come nana, a seconda della massa. Comunque, l’effetto dell’eventuale
secondo scambio di massa è quello di rendere la separazione ancora più stretta, e
far nascere così sistemi stretti di oggetti compatti.
Hurley, Tout e Pols [9] forniscono un esempio di sistema che dà origine ad una
coppia di stelle di neutroni. Nelle ipotesi di orbita già circolare e di velocità indotta
dall’esplosione della supernova alla compagna trascurabile, due masse iniziali di
13 1 e 9 8 M # alla distanza di 138 R # attraversano il primo scambio di massa dinamico quando la primaria è una gigante. Dopo una fase di inviluppo comune la
situazione che si presenta è una binaria composta da una stella di elio di 3 7 M # ed
una compagna in sequenza principale accresciuta a 18 7 M # . Il sistema evolve e la
CAPITOLO 1. BINARIE COALESCENTI
24
prima stella esplode come supernova, lasciando al suo posto una stella di neutroni
di 1 34 M # ed allarga un po’ la separazione. Si ha un ulteriore stadio di inviluppo comune non appena la secondaria riempie il proprio lobo di Roche, e riduce la
sua massa a 4 6 M # , mentre la primaria resta invariata e il sistema si fa sempre più
stretto (1 6 R # ). Dalla seconda esplosione di supernova emerge un sistema di stelle
di neutroni con periodo orbitale di 0 5 giorni.
Ci sono degli intervalli di masse per cui le stelle non subiscono espolsioni di
supernova ma collassano direttamente a buco nero, in questi casi non c’è alcuna
modifica dell’orbita dovuta alla nascita dell’oggetto (conseguenza che in Relatività
Generale continua a valere se il collasso avviene con simmetria sferica, ed è nota
come teorema di Birkhoff), e perciò i corrispondenti intervalli di masse dei buchi
neri saranno maggiormente popolati di sistemi stretti.
La seguente tabella riassume i principali canali di formazione dei sistemi compatti:
CAPITOLO 1. BINARIE COALESCENTI
25
dove a indica la stella primaria, b la secondaria e la legenda dei simboli è:
NC: trasferimento di massa non conservativo
SCE: fase di singolo inviluppo comune
DCE: fase di doppio inviluppo comune
HCE: inviluppo comune con accrescimento ipercritico
SN: esplosione di supernova o collasso del nucleo senza esplosione (per i valori
di masse che lo prevedono)
1.2.3 Evoluzione all’interno di un ammasso
Gli ammassi stellari appena nati hanno la forma irregolare della nube che li ha originati, a poco a poco, tramite interazioni tra le componenti raggiungono la propria
configurazione di equilibrio ed assumono una forma sferica con densità crescente andando verso il nucleo (ρnucl
>
10
1
%
106 M #?< Pc3 ), per questa caratteristica
vengono detti ammassi globulari.
La struttura di un ammasso può essere descritta in termini di sistema di N corpi, dove il numero di stelle varia da 10 4 a 107 a seconda delle dimensioni. Il tempo
di rilassamento è il tempo tipico impiegato dalle interazioni gravitazionali con le
altre stelle dell’ammasso a rimuovere completamente la storia della velocità originaria di una componente, in altre parole entro il tempo di rilassamento l’ammasso
raggiunge il proprio equilibrio termico come gas di stelle. Valori tipici richiesti per
questi assestamenti sono in media 10 9 anni, minori dell’età degli ammassi globulari
che osserviamo oggi, che quindi hanno raggiunto la configurazione stabile.
Non appena si sono formate le stelle dalla nube molecolare, il protoammasso
comincia a collassare cercando l’equilibrio. Inizialmente le stelle sono distribuite
in un ampio intervallo di posizioni e velocità in modo indipendente dalla massa,
e questo ha come effetto che le più massicce abbiano energia cinetica maggiore.
Attraverso gli urti resi sempre più frequenti col procedere del collasso, queste cederanno energia alle stelle più piccole, e tenderanno a concentrarsi per virializzazione
verso il centro dell’ammasso (processo di segregazione della massa). In 10 9 anni
le stelle di massa superiore a 2 masse solari hanno già esaurito i combustibili, e
sono oggetti compatti, per cui la popolazione del centro di un ammasso globulare
è in gran parte composta da oggetti degeneri.
CAPITOLO 1. BINARIE COALESCENTI
26
I sistemi binari sopravvissuti presenti hanno un’energia di legame molto maggiore dell’energia cinetica media di un corpo dell’ammasso, per cui di fatto a livello
globale possono essere considerati come un oggetto singolo. Questi possono aver
resistito alle interazioni grazie alla forte energia di autogravitazione, oppure essere
nati o essersi modificati nel corso del riassestamento dell’ammasso, per interazioni
con singole stelle, o per cattura mareale.
La cattura mareale avviene quando due stelle si avvicinano talmente tra loro da
provocare forti interazioni di marea, che hanno l’effetto di eccitare i modo di oscillazione non radiali delle stelle. Se l’energia assorbita in queste oscillazioni risulta
grande abbastanza da lasciare le due componenti con un’energia totale negativa,
si forma un sistema binario. Molto più spesso però l’effetto delle forze di marea
è così forte da portare le due stelle a coalescere, per cui la cattura mareale non è
un canale di formazione usuale per i sistemi binari. Le interazioni tra più corpi
statisticamente avvengono più di rado rispetto alle precedenti, ma nell’evoluzione
di un ammasso globulare sono le più frequenti cause della nascita di sistemi binari,
che comunque non sono moltissime rispetto al numero iniziale già presente.
Un fenomeno molto frequente nella vita di un ammasso sono le trasformazioni
di sistemi binari esistenti fin dalla nascita dell’ammasso stesso. Le trasformazioni
portano solitamente verso sistemi più stretti e con componenti più massicce.
Dall’interazione di un sistema binario con una singola stella o con altre binarie
risultano tre possibili scenari: la completa distruzione del sistema, uno scambio di
energia tra la binaria e la singola stella, o la sostituzione di una componente con una
stella di campo. Nell’urto l’energia di interazione viene suddivisa tra tutti i corpi
interessati, con la conseguenza che la stella di massa minore riceverà la velocità
maggiore, e sarà quella con maggior probabilità di fuga.
Queste interazioni sono tipicamente abbastanza complesse, e devono essere
studiate per via numerica. Tuttavia in linea generale se l’energia di legame iniziale era grande (maggiore dell’energia cinetica media delle stelle nell’ammasso), il
risultato dell’incontro è un restringimento dell’orbita, in quanto parte dell’energia
gravitazionale viene utilizzata per termalizzare la velocità della stella di campo alla
loro; se il sistema era largo già in partenza è la stella di campo che cede parte della sua energia, contribuendo ad indebilire ulteriormente il sistema. Tutto ciò può
essere riassunto nella “legge di Heggie”: I sistemi forti vengono rafforzati, quelli
CAPITOLO 1. BINARIE COALESCENTI
27
deboli indeboliti.
L’energia cinetica media delle stelle di campo di un ammasso è legata alla sua
temperatura media:
@
mv2 A
3kB T
(1.19)
con kB costante di Boltzmann. Studi numerici [3] sui risultati delle interazioni di
sistemi stretti indicano che l’energia di legame viene incrementata del 20% ad ogni
incontro, e dato che il numero di urti è proporzionale al semiasse maggiore dell’orbita (o equivalentemente ad E
1)
il tasso di rinsaldamento del legame orbitale
risulta indipendente dall’energia stessa:
∆E
>B
0 6
kB T
tril
(1.20)
dove tril indica il tempo di rilassamento dell’ammasso.
I diversi studi numerici sulle interazioni dei sistemi fortemente legati hanno in
comune la previsione di scambi della stella più piccola con una più massiccia. Attraverso interazioni di scambio quindi, la distribuzione di massa delle componenti
binarie si dirige verso stelle di massa più grande, aumentando così il numero di
futuri sistemi relativistici.
Il caso di sistemi di buchi neri è diverso, in quanto i loro progenitori evolvono
troppo velocemente rispetto al tempo di rilassamento dell’ammasso. Essi vengono subito attratti nel centro dalla segregazione di massa, e qui, essendo molto più
massicci delle altre stelle di campo tendono a creare una sorta di sottoammasso e
ad interagire soltanto tra di loro. I sistemi di buchi neri si formano tramite processi
a due o tre corpi, mentre le binarie di un buco nero con una stella meno massiccia vengono trasformati dagli urti che tendono a far sfuggire la componente più
leggera. La popolazione di buchi neri al centro dell’ammasso in sostanza evolverà
separatamente, poiché nessuna stella è così massiccia da poter influire sulla loro
dinamica.
CAPITOLO 1. BINARIE COALESCENTI
28
1.3 Irraggiamento gravitazionale
Una volta giunti allo stadio finale della propria esistenza, dopo processi di scambi
di materia, ed eventuali scambi di compagne in zone di alta densità stellare quali i
centri degli ammassi, i sistemi binari continuano ad essere degli oggetti tutt’altro
che inerti. Le stelle infatti hanno raggiunto densità estremamente elevate concentrate in raggi ridotti, condizioni alle quali gli effetti della Relatività Generale iniziano ad essere significativi, in particolare la perdita di energia orbitale sotto forma
di onde gravitazionali, che spinge i due oggetti sino alla coalescenza.
1.3.1 Un po’ di storia...PSR B1916+13
Una delle più grandi conferme della Relatività Generale degli ultimi 30 anni è
costituita appunto dai sistemi binari di stelle di neutroni, che hanno fornito la prima
evidenza sperimentale dell’esistenza delle onde gravitazionali.
Nel 1974 Hulse e Taylor scoprirono una pulsar con caratteristiche peculiari [8].
Una pulsar (abbreviazione di “pulsating radio source”) è una radiosorgente che
emette un segnale in forma di brevissimi impulsi regolarmente spaziati, con un
intervallo dell’ordine del secondo o una frazione. La brevità del periodo di pulsazione fornisce già indicazioni sulla natura dell’oggetto, considerato che la pulsazione è legata alla sua rotazione: anche una nana bianca è troppo grande, l’unico
candidato possibile è quindi una stella di neutroni. Come verifica è interessante
stimare il periodo di rotazione di una stella di neutroni con massa e momento angolare solari, ma raggio intorno ai 10 km. Assumendo per semplicità che la stella
di neutroni nasca da una compressione in scala a partire dalle dimensioni solari 2
, ad una riduzione di un fattore 7 104 nel raggio corrisponderà una riduzione di
un fattore 5 109 del momento d’inerzia, quindi un corrispondente aumento della
velocità angolare di rotazione. Partendo dal periodo del Sole si arriva a meno di
0,5 ms, il che mostra che i periodi osservati sono perfettamente compatibili con
l’ipotesi che si tratti di una stella di neutroni. Il meccanismo di emissione della
radiazione può essere spiegato ancora come conseguenza del collasso: ogni stella infatti ha un campo magnetico con l’andamento di un dipolo, ed anche questo
2
RC
D
Per maggior chiarezza, i parametri significativi del Sole sono i seguenti: M CED
7 F 105 km , L C D 3 G 8451033 erg s H 1 , Trotaz I 27 giorni
2 F 1033 g ,
CAPITOLO 1. BINARIE COALESCENTI
29
viene compresso, per la conservazione del flusso magnetico, quindi, la stella di
neutroni la stella acquista un intenso campo magnetico polare. In generale la direzione dei poli magnetici non corincide esattamente con l’asse di rotazione. Inoltre
i neutroni della stella non sono tutti stabili: le condizioni di densità tali da garantire
la completa neutronizzazione sussistoni in realtà solamente nel nucleo, mentre in
superficie i neutroni decadono, emettendo elettroni di alta energia. Attraversando
il forte campo magnetico, questi elettroni emettono radiazione di sincrotrone, concentrata nella direzione del loro moto e molto più intensa dove il campo è più forte,
ossia nelle regioni dei poli magnetici. Dato che la stella ruota, il risultato che si osserva dall’esterno è una radiazione che spazza un cono nello spazio, percepibile da
un osservatore che se ne trovi in prossimità. La stella emette energia a spese della
sua energia cinetica, col passare del tempo, quindi, il periodo della pulsar tende
lentamente ad aumentare.
La pulsar osservata da Hulse e Taylor aveva un periodo di 59 ms, ed una variazione della frequenza dovuta alla perdita di energia accennata sopra, di 2 47583 2 10
15 s 2 [8], ma possedeva
anche una variazione periodica con un periodo di 27906 9807804 6 s, si ampiezza relativa di circa 10
3.
L’interpretazione che ne dettero fu quella di un
effetto Doppler, derivante dal moto orbitale della stella in un sistema binario. Dal
periodo orbitale, tramite la terza legge di Keplero, fu possibile ricavare il valore dell’espressione
a3 m1 m2 !
m32
2
dove a è il semiasse maggiore dell’orbita, e, assumentdo
che le masse fossero dell’ordine di quella del Sole, trovarono a ) 2 10 6 km, poco
più del diametro solare, ed un’eccentricità e ) 0 62. Data la distanza ravvicinata,
constatarono che dovesse trattarsi di un sistema binario di stelle di neutroni.
Il sistema risultava così stretto da necessitare la mobilitazione della Relatività
Generale, la quale permise di raffinare le conoscenze: in primo luogo, la variazione di frequenza non era dovuta soltanto all’effetto Doppler, ma esisteva anche un
significativo redshift gravitazionale nel campo della compagna (circa 3 10
5
tra
apoastro e periastro), e un effetto di ritardo della luce dovuto alla presenza delle
masse non trascurabile. Inoltre dallo studio dettagliato del moto orbitale fu evidenziato un notevole spostamento del periastro (altro effetto previsto dalla teoria
einsteiniana), di 4 226621 11 J<
anno . Confrontando tutti questi effetti con le pre-
visioni teoriche determinarono tutti i parametri delle stelle, in particolare le masse:
m1
1 4410 5 M # ed m2
1 3784 5 M # .
CAPITOLO 1. BINARIE COALESCENTI
30
Ma le osservazioni prolungate nel tempo mostrarono un altro fatto: il periodo
orbitale non era costante, ma decresceva nel tempo:
Ṫ
12
2 422 6 10
(1.21)
Una diminuzione del periodo implica un restringimento dell’orbita, ed una conseguente perdita di energia del sistema, pari a
Ė
su un’energia totale di
)B
5 6 1031 erg s
1
9 67 1047 erg.
L’unico meccanismo che potesse spiegare questa perdita di energia era l’emissione di onde gravitazionali, che la teoria di Einstein prevede essere nell’approssimazione di quadrupolo:
Ė
G4 m21 m72
32
5 c5 a5 m1 m2 1
4
73 2
24 e
1 e2 37 4
96 e
7
2
(1.22)
dove l’apparente asimmetria tra le due masse è dovuta all’uso del semiasse dell’orbita di m1 , anzichè di quello del moto relativo.
E’ stato effettuato un confronto teoria-osservazioni, e nell’arco di circa 20 anni
di monitoraggio, ha dato il seguente risultato: 1 0032 K 0 0035, che nel 1993 è
valso ai due scienziati il Nobel per la fisica.
1.3.2 Forma del segnale
Un sistema binario ha un momento di quadrupolo gravitazionale dato da:
Qi j
dove η L
m1 m2
m1 m2 !
2
2η vi v j
M
n̂i nˆj a
(1.23)
, n̂i ed nˆj sono i versori delle direzioni delle due componenti, M
la massa totale.
Per avere un’idea degli ordini di grandezza e delle caratteristiche del sistema
“ideale” da rivelare, è utile calcolare il segnale irraggiato da un modello estremamente semplificato: si supponga che le stelle siano gemelle di massa m e che
CAPITOLO 1. BINARIE COALESCENTI
31
l’orbita sia circolare, allora il momento di quadrupolo risulta proporzionale alla
M a 2 . La sua derivata terza
...
2
Ma2 ω3 , e
richiede di dividere per la terza potenza del periodo, quindi Q > Ma
>
T3
massa totale ed al quadrato del raggio orbitale Q
poiché dalla terza legge di Keplero si ha che ω ∝
...
Q>
M
a
M
>
m
,
a3
risulta:
5
2
(1.24)
Di conseguenza la luminosità gravitazionale emessa è proporzionale alla quinta
potenza del rapporto nella formula precedente che, se espresso in unità geometriche, suggerisce come migliori sorgenti i sistemi stretti dove la separazione tra gli
oggetti sia dell’ordine del loro raggio di Schwarzschild.
L’evoluzione della perturbazione alla metrica spazio-temporale indotta da un
sistema binario può essere suddivisa in tre fasi:
1. una prima, in cui le stelle restringono sempre più la loro orbita fino al primo contatto, che ha la caratteristica di aumentare in frequenza ed ampiezza
con lo scorrere del tempo3 , fino a raggiungere il culmine nell’ ultima orbita
stabile, l’ultima posizione di semiequilibrio per l’energia, nell’istante immediatamente precedente alla forte interazione tra le due stelle che porterà al
contatto e successivamente alla nascita del buco nero.
2. La seconda, in cui avviene la fusione tra le due componenti, che dipende
fortemente dai modelli usati per descrivere l’equazione di stato delle stelle
di neutroni, e dai calcoli numerici sulla geometria generata da due buchi neri
nel caso di sistemi più pesanti.
3. Infine, la terza in cui si porta a compimento la nascita del buco nero generato dalla fusione delle due stelle, che approssimativamente ha la forma di
sinusoidi smorzate, ma con andamento dell’ampiezza e della fase difficili da
prevedere.
3 La metrica
“di base” perturbata dal passaggio dell’onda viene assunta minkowskiana, per cui ha
senso definire il tempo come abitualmente, in quanto gli effetti della radiazione gravitazionale sono
puramente perturbativi
CAPITOLO 1. BINARIE COALESCENTI
32
Nell’approssimazione di masse puntiformi ed orbite newtoniane circolari (alle
frequenze alle quali il segnale è rivelabile la circolarizzazione è avvenuta completamente4 ), la forma d’onda nella prima fase è data da:
h
hx
dove A >
GMc !
r
5
3
A 6 f t
A 6 f t
7
7
2
3
cos φ t 2
3
sin φ t (1.25)
è l’ampiezza dell’onda, inversamente proporzionale alla distanza
e funzione delle due masse tramite la massa di chirp M c
m1 m2 !
L
m1 m2 !
dell’onda, che in questa approssimazione vale:
φ t
16π f0 τ f0 11
con f0 frequenza gravitazionale per t
.
1
1
t
τ f0 5
8
/
3
5
1
5
, φ t è la fase
(1.26)
0, τ f 0 il tempo residuo prima della coa-
lescenza (tempo di chirp), mentre l’andamento della frequenza, che risulta doppia rispetto a quella orbitale, a causa della natura quadrupolare della radiazione
gravitazionale, è dato da:
ft
4
f0 1 t
τ f0 3
8
(1.27)
La binaria PSR B1913+16 attualmente ha eccentricità pari a 0,617 , quando raggiungerà
frequenze di emissione dell’ordine dei 10 Hz l’eccentricità si sarà ridotta fino a 5 G 3 F 10 H 6 [5]
CAPITOLO 1. BINARIE COALESCENTI
33
In base alla frequenza orbitale attuale, le componenti sono destinate a spiraleggiare fino a coalescere in tempi minori o maggiori del tempo di Hubble 5 secondo
la formula:
tcoal
a4
5c5
256G m1 m2 m1 m2 1 5 108
a4
m1 m2 m1 m2 (1.28)
dove la seconda espressione è in unità solari 6 .
Dalla relazione precedente si nota che per masse intorno al valore di quella
solare, occorre una separazione più stretta di 3 raggi solari perchè la coalescenza
avvenga in tempi minori dell’età dell’Universo. Per questo motivo i sistemi di nane,
sebbene abbiano la stessa sorte delle binarie più massicce, difficilmente saranno
osservabili, avendo come punto a proprio sfavore anche un segnale estremamente
più debole (la luminosità gravitazionale dipende fortemente dalla massa).
Una quantità che sarà interessante dal punto di vista della rivelazione è il tempo di permanenza del segnale in una determinata banda di frequenza, ottenibile
semplicemente invertendo la relazione 1.27:
∆t
τ f0
.
fmin f0
8
3
8
3
fmax f0
(1.30)
/
L’espressione per il segnale dato dalla 1.25 è indipendente dalla posizione della
sorgente nel cielo, poiché è calcolata nel suo stesso sistema di riferimento. Ad un
osservatore terrestre l’onda appare invece della forma:
h
hx
A 6 f t
A 6 f t
7
7
2
3 N
cos φ t cos 2θ 2
3 N
sin φ t cos 2θ cos i cos φ t sin 2θ cos 2 i 1
2
sin φ t sin 2θ cos iO
(1.31)
cos 2 i 1
O
2
5
La legge di Hubble v D H0 r lega la velocità di un oggetto alla sua distanza dall’osservatore,
ed esprime l’espansione dell’Universo al primo ordine. Da questa è possibile ricavare un ordine
di grandezza per l’età dell’Universo, dato proprio dall’inverso della costante di Hubble: H0H 1 I
1 G 8 F 1010 anni (tempo di Hubble).
6 Nel caso generale in cui l’orbita sia ancora ellittica con eccentricità e , il sistema è previsto
0
collassare su se stesso entro:
tcoal
D
5c5
a4 P 1 Q e 0 R 4
48
48G m m P m m e 19
T 1
S
1 2 1S
2R
e0
121 e2
304 0 U
3480
2299 V
0
29
e 19 T 1 S
P
1Q
121 e2
304 0 U
3
e2 2
R
1181
2299
de
(1.29)
CAPITOLO 1. BINARIE COALESCENTI
34
dove i descrive l’inclinazione del piano dell’orbita rispetto alla linea di vista, θ la
polarizzazione del’onda. La relazione tra i due sistemi di riferimento è rappresentata nella figura seguente, dove (α δ) indicano le coordinate equatoriali 7 della
sorgente:
1.3.3 Approssimazioni successive
Sempre nell’approssimazione di campo debole, ovvero molto lontano dalle sorgenti, è possibile raffinare i risultati ottenuti con le ipotesi newtoniane, aggiungendo
delle correzioni dette “Post-Newtoniane”.
Il formalismo Post-Newtoniano è sostanzialmente un’espansione in serie attorno all’ipotesi di campo debole (che riguarda quindi il potenziale gravitazionale) e
sorgente lenta (in moto con velocità non relativistiche, lo sviluppo è in potenze di
7
Le coordinate equatoriali permettono di identificare un punto sulla sfera celeste, dove sono
definite le quantità analoghe alla sfera terrestre (equatore, etc.) così è possibile assegnare delle
coordinate alla proiezione delle stelle su questa superficie fittizia. Esse sono così definite:
Declinazione (δ): arco di meridiano celeste compreso tra la stella e l’equatore celeste
Ascensione Retta (α): arco di equatore celeste compreso tra il meridiano celeste passante per
l’astro ed il punto γ, definito come il punto sull’equatore celeste in cui passa il Sole nel giorno
dell’equinozio di primavera.
CAPITOLO 1. BINARIE COALESCENTI
v
c ),
35
dove l’ordine zero è dato dalla teoria Newtoniana, e gli ordini successivi sono
le correzioni apportate dalla Relatività Generale.
Al secondo ordine Post-Newtoniano (2PN) il segnale gravitazionale ha la forma della 1.25, ma l’espressione per la fase in funzione della frequenza è [22]:
φ f
16π fr τ0
5
.
1
5
3
f
fr
3
4
25τ1 5 5
16τ0
5τ1
4τ0
1
1
3
f
fr
3
2
3
1
f fr
5τ2
2τ0
4
4
1
1
3
f
fr
3
(1.32)
/
4
dove fr è una frequenza di riferimento scelta arbitrariamente come unità di misura,
mentre i τi sono i raffinamenti del tempo di chirp newtoniano, definiti come:
τ0
L
5
f
256π r
1
5
3
πM fr τ1
L
1
η
5
f
192π r
τ1 5 5
τ2
L
5
f
128π r
1
1
L
1
πM fr 1
f
8 r
1
3
πM fr 1
753
336
2
3
πM fr 3058673
1016064
11 η η
4
1
1
η
5429 617 2 η
η η
1008
144
1
(1.33)
dove η identifica il rapporto tra massa ridotta e massa totale del sistema.
La frequenza di irraggiamento è data implicitamente dall’equazione differenziale:
df
dt
3 fr
8τ0
f fr
11
3
.
1
3τ1
4τ0
f
fr
2
3
5τ1 5 5
8τ0
f
fr
11
3
1
2
3
τ2
τ0
9
8
τ1 τ0
4
2
4
f 3/
fr
(1.34)
La soluzione delle equazioni di Einstein per l’irraggiamento di binarie è stata
calcolata anche fino al 2,5 PN [5] e successivi, tuttavia l’approssimazione newtoniana è sufficiente per stimare l’orizzonte osservabile per via gravitazionale tramite
una rete di rivelatori, semplificando notevolmente i calcoli.
CAPITOLO 1. BINARIE COALESCENTI
36
1.3.4 Tassi di coalescenze
Il tasso di coalescenza per le binarie al variare delle masse previsto dai modelli
di evoluzione proposti da Belczynski, Kalogera e Bulik è stato calibrato usando il
numero di esplosioni di supernova sperimentale, normalizzato alla nostra galassia
[2].
I diversi modelli scaturiscono da variazioni nel valore di parametri rispetto ad
uno di base, il modello evolutivo standard, ed in alcuni casi si osservano differenze
notevoli nell’evoluzione. Uno di questi casi è dato dalla velocità acquistata in seguito all’esplosione della stella come supernova, che è in valore inversamente proporzionale al numero di binarie che collidono, poiché essa contribuisce a slegare
gravitazionalmente le due stelle, e a rompere il sistema o comunque a renderlo più
largo. E’ inoltre interessante notare come le binarie che ricevano velocità dell’ordine di quella orbitale abbiano le migliori probabilità di sopravvivenza (Kalogera
1996).
Un altro effetto che tende a modificare il futuro di un sistema è la fase di inviluppo comune con accrescimento ipercritico, che oltre ad aumentare la massa
dell’oggetto compatto dandogli la possibilità di collassare a buco nero, porta ad
una configurazione più larga rispetto al caso di accrescimento normale, in quanto
parte dell’inviluppo viene catturato, e non ha quindi bisogno di essere espulso dal
sistema a spese dell’energia orbitale. Il contributo di questo fenomeno è comunque
piccolo, e non modifica la popolazione di binarie, e di consegenza i tassi di coalescenza, in maniera sostanziale. Il numero di buchi neri binari è invece fortemente
affetto dalla perdita di massa per vento stellare, che tende a farlo diminuire.
Il numero di coalescenze per galassia normalizzato alla Via Lattea è riportato
nella tabella seguente, dove gli autori hanno calcolato il flusso per ogni variazione
del modello standard (A):
nei modelli di tipo B è stata variata la velocità impressa dall’esplosione della
supernova (da 0 a 600 km s 1 )
il modello C non prevede l’accrescimento ipercritico
i modelli D variano il valore della massa di Chandraseckar per le stelle di
neutroni
nei modelli E cambia l’efficienza dell’inviluppo comune
CAPITOLO 1. BINARIE COALESCENTI
37
quelli di tipo F fanno variare la frazione di massa accresciuta dalla compagna
nei modelli di tipo G cambia l’efficienza del vento stellare
in quelli di tipo H ci sono diversi valori di masse dell’inviluppo convettivo di
elio nelle giganti
il modello I assume che le stelle si siano formate tutte 10 miliardi di anni fa
nel modello J è modificata la funzione di distribuzione di massa assumendo che
sia ∝ m
2 5 35
i modelli K alterano la frazione di binarie nella popolazione stellare (dimezzandola e raddoppiandola)
nei modelli L varia il momento angolare perso nella fase di inviluppo comune
i modelli M modificano la distribuzione iniziale del rapporto di masse
il modello artificiale N non prevede l’espansione alla fase di gigante di elio
infine il modello O allarga l’intervallo di masse per cui si ha una parziale
ricaduta di materiale sulla stella:
CAPITOLO 1. BINARIE COALESCENTI
38
Capitolo 2
I rivelatori interferometrici
2.1 Introduzione
Sebbene ci sia analogia tra le equazioni che le generano, per quanto riguarda la
rivelazione le onde gravitazionali sono estremamente più problematiche rispetto
a quelle elettromagnetiche. L’ostacolo principale è dato dalla natura stessa del
segnale gravitazionale: la radiazione che si propaga infatti è una perturbazione
dello spazio tempo, che modificherà quindi anche lo strumento di rivelazione. Per
riuscire quindi a misurare direttamente il passaggio di un’onda gravitazionale, è
necessario sfruttare l’effetto che questa produce sui corpi.
Le uniche componenti non nulle nel tensore di Riemann
1
di un’onda gravi-
tazionale producono delle forze di marea oscillanti, che producono deformazioni
proporzionali alle dimensioni dell’oggetto, per cui su di un singolo corpo dalle
dimensioni trascurabili non hanno alcun effetto.
Prese però due masse che seguano le proprie geodetiche, che sulla Terra si
traduce in “in caduta libera”, se ξi rappresenta la separazione spaziale tra le due
geodetiche, si ha:
d 2 ξi
dt 2
Ri0k0 ξk
(2.1)
1 Il tensore di Riemann è una quantità dipendente dalle derivate seconde della metrica, e si annulla
su uno spazio piatto
39
CAPITOLO 2. I RIVELATORI INTERFEROMETRICI
40
dove R indica il tensore di Riemann, che per un’onda gravitazionale è della forma:
Ri0k0
dove è usata la notazione Aαβ 5 β
∂Aαβ
∂xβ
1
hik 5 00
2
(2.2)
per la derivata. Quello che accade dunque
è che due masse investite da radiazione gravitazionale subiscono un’accelerazione
di marea data da:
d 2 δξi
dt 2
1
hik 5 00 ξk
2
Vista la microscopica ampiezza del tensore h è lecito considerare lo spostamento
molto piccolo rispetto alla distanza di equilibrio ξ k , attorno cui esse oscilleranno
con ampiezza:
δξi
1
hik ξk
2
I rivelatori interferometrici sfruttano proprio questo fenomeno, come verrà
spiegato in dettaglio nei paragrafi successivi.
Se le due masse invece che in caduta libera sono collegate elasticamente l’equazione per l’accelerazione è leggermente diversa:
d 2 δξi
dt 2
1
hik 5 00 ξk ω20 δξi
2
e per onde monocromatiche di frequenza ω si integra ottenendo:
δξi
ω2 hik ξk
2 ω20 ω2 Rispetto al caso precedente ha un fattore di risonanza
ω2
ω20 ω2
di cui si servono in-
vece i rivelatori a barra. In questi la molla è costituita dalla stessa elasticità del
blocco che forma l’antenna, ed il principio su cui si basano è il fatto che quando la
frequenza dell’onda si avvicina molto a quella di risonanza del rivelatore, il segnale
risulta fortemente amplificato, per cui è più facile da rivelare. Il difetto di questo
tipo di strumenti è però la banda molto stretta, che permette di captare sorgenti che
emettono ad una determinata frequenza.
CAPITOLO 2. I RIVELATORI INTERFEROMETRICI
41
2.2 Interferometro di Michelson e Morley
Tra i metodi per determinare la distanza tra due corpi con estrema accuratezza uno
dei più efficaci consiste nel misurare il tempo impiegato da un fascio di luce per un
viaggio di andata e ritorno da uno all’altro. E’ una tecnica per mappare la struttura
dello spazio-tempo, e l’idea principale sfruttata per l’utilizzo di un interferometro
come rivelatore di onde gravitazionali.
Il primo interferometro, ideato da Michelson e Morley, aveva come scopo lo
studio del moto della Terra nell’etere: a causa di questo, infatti, secondo la legge di
composizione delle velocità galileiana, la velocità della luce sarebbe dovuta essere
diversa nella direzione del moto rispetto a quella perpendicolare.
A questo scopo avevano ideato lo strumento in figura
che nella sua versione più semplice, è costituito da una sorgente luminosa seguita da uno specchio semiriflettente, e due specchi ad una certa distanza dal primo
(la stessa per entrambi), in direzioni ortogonali tra loro. La luce prodotta dalla sorgente viene divisa in due fasci dallo specchio semiriflettente, dopodichè la parte
trasmessa viaggia in una direzione, mentre quella riflessa nell’altra. Giunte alla
fine dei propri percorsi, grazie agli specchi esse tornano indietro per incontrarsi nel
semiriflettente. Provenendo dalla stessa sorgente, le fasi dei due fasci sono lega-
CAPITOLO 2. I RIVELATORI INTERFEROMETRICI
42
te tra loro da una relazione nota, per cui è facile studiarne l’evoluzione durante il
tragitto.
Se il campo elettrico della luce in ingresso è E 0 exp i 2π f t kx ed i coefficienti di trasmissione e riflessione dello specchio semiriflettente sono rispettivamente
T
W
i
2
,R
W
1
2
all’ingresso dei due bracci i campi diventano:
Ex
Ey
iE0
X
exp i 2π f t
2
kx x (2.3)
E0
exp i 2π f t
2
ky x (2.4)
X
La riflessione da parte degli specchi alla fine di ciascun braccio inverte semplicemente il segno dei campi, che giunti nuovamente nello specchio semiriflettente
saranno in parte trasmessi, in parte riflessi con i medesimi coefficienti dell’andata.
La luce all’uscita dell’interferometro (quella trasmessa) risulta quindi:
Eout
i
E0 exp i 2π f t
2
i
E0 exp i 2π f t 2ky Ly 2
iE0 cos kx Lx ky Ly exp 2π f t
2kx Lx k x Lx ky Ly (2.5)
Sostanzialmente quindi un interferometro di Michelson traduce la differenza
tra i tempi di percorrenza nella potenza di un segnale luminoso con una precisione almeno dell’ordine del periodo ottico λc . E’ interessante notare che l’ampiezza
dipende dalla differenza di fase tra i fasci nei due bracci accumulata durante il
tragitto. Se questa è nulla la luce viene completamente trasmessa, mentre se c’è
uno sfasamento di
π
2
si ha la riflessione totale e l’uscita è buia. Michelson e Mor-
ley decisero di far partire i due fronti d’onda con fasi ortogonali, in modo che
fosse più semplice, in caso di eventuale sfasamento, percepire un fievole bagliore
nell’oscurità piuttosto che un’impercettibile diminuzione dell’ intensità massima.
Per aumentare la sensibilità dello strumento vennero posizionati ulteriori specchi all’interno dei bracci in modo che i fasci percorressero ripetutamente il tragitto,
aumentando così la lunghezza del percorso e con essa i suoi effetti sull’ampiezza del segnale in uscita. Con un tragitto di 22 m la differenza di tempo data da
uno sfasamento di
π
2
è 1 7 10
16 s,
e l’interferometro è capace di percepire una
differenza di tempi minima pari a 8 10
17 s
[17].
CAPITOLO 2. I RIVELATORI INTERFEROMETRICI
43
Secondo la teoria dell’etere, al loro ricongiungimento dopo il percorso nei bracci i due fronti d’onda avrebbero dovuto impiegare tempi diversi, e di conseguenza aver subito uno sfasamento relativo rispetto alla partenza. Quello che i due
scienziati trovarono, però fu che i due fronti erano perfettamente in fase: avevano
involontariamente dimostrato quindi, prima che fosse ipotizzato dalla teoria della
relatività, che la luce viaggia sempre con la medesima velocità in tutti i sistemi di
riferimento.
2.3 Principio di funzionamento di un interferometro gravitazionale
Al fine di monitorare il passaggio di un’onda gravitazionale è necessario misurare
con estrema accuratezza la variazione della distanza tra due masse in caduta libera,
e questo può essere fatto tramite un interferometro di Michelson opportunamente
modificato.
Le due principali correzioni da apportare riguardano le dimensioni ed il fissaggio degli specchi. Il primo problema è dovuto all’entità dello spostamento che
hanno le due geodetiche: esso è proporzionale ad h, quindi quasi infinitesimo. Fortunatamente è proporzionale anche alla distanza iniziale tra gli specchi, perciò è
possibile amplificare gli effetti costruendo un interferometro con bracci dell’ordine
delle centinaia-migliaia di metri, e facendo percorrere il tragitto al fascio il massimo numero di volte compatibilmente con le dissipazioni di energia. Per quanto
riguarda gli specchi, non possono essere legati ad una struttura rigida, ma andranno
sospesi in modo che possano seguire le proprie geodetiche, e questo sarà realizzato
tramite dei pendoli particolari, come spiegato in seguito.
Prima di entrare più in dettaglio nella descrizione dello strumento è importante
capire l’idea base del suo funzionamento. Un raggio di luce può connettere due
punti dello spazio-tempo separati da un intervallo nullo (o di tipo luce, appunto)
ds2
0
(2.6)
Definito il sistema di riferimento del rivelatore con l’origine nello specchio semiriflettente e gli assi x e y determinati dai bracci, l’intervallo percorso da ogni fascio
CAPITOLO 2. I RIVELATORI INTERFEROMETRICI
44
di luce avrà soltanto una componente spaziale non nulla, rispettivamente dx o dy,
e sarà della forma:
0 ds2
ηµν
hµν dxµ dxν
c2 dt 2 Y 1
h11 dx2
(2.7)
il che esprime in forma diversa l’effetto che ha l’onda gravitazionale al suo passaggio: modulare la distanza dx tra due punti di un fattore h 11 . E’ possibile calcolare
il tempo impiegato per un viaggio all’interno del braccio:
tand
Z
0
dt
[
1
c
L
Z
1
c
0
1 ] h11 dx ^
\
L
Z
0
1]
_
1
h11 ` dx
2
(2.8)
dove nel secondo passaggio è stata usata l’approssimazione per la radice quadrata
al primo ordine in h, giustificata dal suo valore estremamente piccolo. Il calcolo
per il viaggio di ritorno è lo stesso, ed il tempo totale impiegato dal fascio di luce
è:
τtot
2L 1
c
2c a
L
0
1
2c a
h11 dx 0
L
h11 dx
(2.9)
L’espressione per il braccio perpendicolare è analoga.
Si consideri il semplice caso (al quale perarltro è sempre possibile ricondursi) di onda piana monocromatica di frequenza f che si propaga lungo l’asse z con
polarizzazione
, che ha h11 h22 . Se 2π f τtot
1 è possibile considerare la me-
trica perturbativa h costante durante la sua permanenza nello strumento. Ci saranno
quindi due perturbazioni uguali ed opposte nelle due direzioni perpendicolari, e il
ritardo tra i bracci sarà:
∆τ t h t
2L
c
(2.10)
h t
4πL
λ
(2.11)
corrispondente ad uno sfasamento:
∆φ t dove λ è la lunghezza d’onda del fascio luminoso.
La quantità 2π f τtot però non può crescere indefinitamente: quando vale 1 la
luce impiega esattamente un periodo dell’onda gravitazionale nel suo viaggio, gli
effetti sulla fase si compensano esattamente e all’uscita non risulta alcun passaggio.
CAPITOLO 2. I RIVELATORI INTERFEROMETRICI
45
Il valore di τtot per cui questo avviene è per cui il massimo possibile. In tutti i casi
intermedi tra 2π f τtot
1 e 2π f τtot
1 la differenza tra i cammini nei due bracci
e il relativo sfasamento sono rispettivamente:
∆τ t ∆φ t dove sinc x L
1
πx
h t
2L
2L
2L
exp iπ f sinc π f c
c
c
(2.12)
h t
4πL
2L
2L
exp iπ f sinc π f λ
c
c
(2.13)
sin πx.
E’ possibile esprimere, nel limite di basse frequenze, la dipendenza della sensibilità dello strumento dagli angoli di Eulero, ottenendo così la funzione d’antenna:
∆φ t h t
4πL 1 1
cos2 Θ cos 2Φ cos 2Ψ cos Θ sin 2Φ sin 2Ψ c
λ b2
(2.14)
dove gli angoli sono definiti come nella figura seguente:
La risposta del rivelatore è massima quando l’onda si propaga lungo l’asse z ,
nelle direzioni x e y perde di un fattore 2, mentre si annulla completamente sulle
bisettrici dei quadranti x y.
CAPITOLO 2. I RIVELATORI INTERFEROMETRICI
46
2.4 Schema di un rivelatore
Il disegno generale di un interferometro gravitazionale, come visto in precedenza, è quello di Michelson e Morley. Entrando un minimo nel dettaglio verranno
ora analizzate le principali caratteristiche dello strumento modificato per captare
radiazione gravitazionale.
Tutto l’apparato è tenuto sotto vuoto per evitare qualsiasi tipo di disturbi esterni, attenzione indispensabile data l’entità estremamante piccola ( 10
21
10
22 )
dell’effetto dell’onda sulla lunghezza del percorso.
2.4.1 Masse in caduta libera
I due specchi sono “trattenuti” in caduta libera tramite dei pendoli, così che le forze
che vi agiscono siano principalmente gravitazionali, e le dissipazioni siano minimizzate. Trascurando le dissipazioni, l’equazione del moto di ciascuno specchio
è:
mẍ
mg
x0 x l
Fext
(2.15)
dove l è la lunghezza della sospensione del pendolo, x la posizione della massa e
x0 della sospensione. In termini della frequenza la soluzione è:
Fext f !
4π2 f02 x0 f m
2
2
2
4π f0 f
x f
(2.16)
con f0 0 gl .
In assenza di forze esterne
x f x0 f f02
f02 f 2
(2.17)
è possibile distinguere due diversi comportamenti: al di sotto della frequenza di
risonanza le vibrazioni presenti nel punto di sospensione vengono interamente trasmesse alla massa, mentre nel limite f
x f!
x0 f !
&
f 02
.
f2
d
f 0 il pendolo funziona da attenuatore e
Nel caso di alte frequenze la massa sospesa la pendolo reagisce ad una solleci-
CAPITOLO 2. I RIVELATORI INTERFEROMETRICI
47
tazione esterna come se fosse libera, proprio per questo motivo è possibile simulare
la caduta libera tramite la sospensione.
Al fine di aumentare la sensibilità del rivelatore è utile sospendere lo specchio in fondo a più pendoli in cascata. In questo modo, infatti, la funzione di
trasferimento dal punto di sospensione alla massa finale è:
x f x0 f N
∏ f2
ie 1 i
fi2
f2
(2.18)
e per frequenze sufficientemente al di sopra di quelle di risonanza:
x f x0 f &
∏Nie 1 fi2
f 2N
(2.19)
Da quest’ultima formula si vede che per ottenere uno strumento che riveli in una
banda molto larga, è necessario scegliere per i pendoli materiali con frequenza di
risonanza più bassa possibile.
2.4.2 Tragitto del fascio luminoso
Il raggio di luce che viaggia nei bracci è un laser ad alta potenza, necessario a
mantenere l’ estremo direzionamento e la minima dispersione del fascio durante
il tragitto. Più precisamente, Virgo utilizza un Nd Yag con λ 1064 nm con una
potenza di 20W [10].
Il viaggio del laser verso lo specchio semiriflettente passa attraverso il power recycling allo scopo di aumentare la potenza all’interno dell’interferometro
e ridurre così le fluttuazioni dovute allo shot noise.
Dopo essere stato scisso nei due fasci perpendicolari, per aumentare il cammino ottico e poter così raggiungere sensibilità tali da rivelare segnali gravitazionali,
il laser viene catturato in ciascun braccio da una cavità di Fabry Perot. Essa consiste in una coppia di specchi, uno al suo ingresso, l’altro alla fine della cavità, che
riflettendo ripetutamente il fascio laser, ne allungano la permanenza all’interno del
braccio, e così il cammino ottico. La fase del fascio riflesso all’interno della cavità
è funzione della lunghezza della cavità stessa, ad una variazione δL della lunghezza
CAPITOLO 2. I RIVELATORI INTERFEROMETRICI
48
corrisponde uno sfasamento di:
∆φ 8F
δL
λ
(2.20)
con F finezza della cavità, che se R è la riflettività dello specchio, è data da F
. In condizioni di basse frequenza, ovvero quando vale 2π f τtot
W
L
π R
1 R
1, la risposta
dello strumento ad una sollecitazione gravitazionale risulta:
∆φ 8FL
λ
h
0
1
(2.21)
4 f LF 2
c
Confrontando questo risultato con l’analogo nel caso di interferometro di Michelson semplice si ricava un guadagno di sensibilità pari a
2π
F ,
che si traduce come una
lunghezza equivalente del cammino:
Le f f
Per Virgo L
3 km, F
L
2π
F
(2.22)
50 si ha quindi una lunghezza equivalente pari a 95 km
circa.
I due fasci si ricongiungono nello specchio semiriflettente, e la parte trasmessa
viene catturata dai fotodiodi dove è possibile visualizzarla e procedere con l’analisi.
2.5 Rumore
La rivelabilità dello sfasamento indotto dal passaggio di un’onda gravitazionale è
limitata, come avviene per ogni tipo di misura, dal rumore[24].
Le fonti di rumore sono molteplici e possono essere suddivise in due categorie:
1. Fluttuazioni nella posizione degli specchi, associate alle vibrazioni del suolo
(rumore sismico residuo e fluttuazioni della gravità locale), al rumore interno agli specchi e alle sospensioni (rumore termico, effetti non lineari) ed
alla possibile reintroduzione di rumore da parte del controllo attivo delle
sospensioni.
2. Rumore di lettura ottica, legato alla lettura interferometrica della posizione
CAPITOLO 2. I RIVELATORI INTERFEROMETRICI
49
degli specchi, che fa fluttuare l’uscita del fotodiodo anche in assenza di segnale, ed è dovuto allo shot noise del laser, alle fluttuazioni della pressione
di radiazione, ed alle fluttuazioni della frequenza e potenza del laser stesso.
A causa di tutti questi contributi il fotodiodo in uscita registrerà continuamente
uno sfasamento all’interno del quale sarà compito degli analizzatori trovare un
eventuale segnale. Lo spettro di questo rumore h n t è così definito:
Sn f lim
Tf ∞
X
1
T
T
2
T
2
a
hn t exp i2π f t dt
2
(2.23)
2.5.1 Rumore sismico
Questo tipo di rumore viene prodotto dalle vibrazioni del suolo, non esiste una
legge universale che lo descriva, anche perchè esso varia anche di ordini di grandezza a seconda del luogo e dei giorni. E’ causato da attività umana (strade vicine,
o macchine agricole nei campi circostanti come nel caso di Virgo), dal vento, ed
anche il mare se è sufficientemente vicino può arrecare disturbi. Per frequenze al
di sopra di 1 Hz è possibile tracciare un andamento approssimativo dello spettro
proporzionale ad
1
:
f4
Ssn f
dove ξ
>
ξ2 10 12
2 f4
f2
f2
f02 f12
2
m2 Hz
3
>
0 1 1 m Hz 2 rappresenta l’attività umana, f 0
>
1
0 1 Hz ed f1
>
(2.24)
0 5 Hz
[10].
Nonostante l’isolamento degli specchi da parte dei pendoli superattenuatori il
rumore sismico è la principale limitazione alla sensibilità degli strumenti a basse
frequenze.
2.5.2 Fluttuazioni della gravità locale
In linea di principio è possibile abbassare indefinitamente la soglia della minima
frequenza rivelabile aumentando il numero dei pendoli in cascata, esiste però un
limite inferiore: a causa delle onde sismiche la distribuzione di massa nel sottosuo-
CAPITOLO 2. I RIVELATORI INTERFEROMETRICI
50
lo varia nel tempo, e con essa la gravità locale. Queste fluttuazioni raggiungono
direttamente gli specchi, producendo un rumore con densità spettrale pari a:
Slgn f Ssn
9π
Gρ Lf2
2
(2.25)
con ρ densità media del suolo.
Il gradiente di gravità, detto anche rumore newtoniano, pone quindi di fatto il
limite inferiore alla minima frequenza rivelabile da un interferometro.
2.5.3 Rumore termico
Il rumore termico è associato alle dissipazioni interne al sistema. Tramite il teorema di fluttuazione-dissipazione che lega i fenomeni dissipativi ai moti browniani
del sistema stesso è possibile quantificare queste dispersioni.
Un pendolo è un oscillatore armonico, e nel caso di fluttuazioni dovute al materiale stesso le perdite possono essere rappresentate da un termine immaginario
fittizio nell’equazione del moto, che dà come risultato:
Stn f kB T φ f02
16π3 m f 6 f02 f 2 2 f04 Q
2
(2.26)
7
dove kB è la costante di Boltzmann, T la temperatura e Q il fattore di qualità del
materiale.
Nel caso di più oscillatori in cascata si definisce una massa efficace µ n dove En è l’energia di ogni modo, e lo spostamento provocato è:
Stn f kB T
16π3 f
∑µ
n
n6
fn2 φn fn2
f 2 2 fn4 Qn 2 7
En
4π2 f nx2n
(2.27)
2.5.4 Shot noise
E’ associato alla natura quantistica della luce, che causa una fluttuazione nel numero di fotoni del flusso in uscita data da:
δn
N
cλ
4πPin τ
g
(2.28)
CAPITOLO 2. I RIVELATORI INTERFEROMETRICI
51
λ
4π h c Pin τ,
dove N è il numero medio di fotoni per misura, pari a
con τ durata
media di una misura. Questo corrisponde ad un rumore nella rivelazione di:
Sshot
π g c2
1
8F 2 L2 νPin .
4π fgw
2
LF c
(2.29)
/
dove η è l’efficienza quantica del fotodiodo, Pin e φ rispettivamente la potenza e la
fase del laser.
Aumentare la finezza della cavità di Fabry Perot aiuta a ridurre questo tipo
di rumore, però provoca come effetto collaterale la riduzione della banda di rivelazione. A grandi frequenze infatti, quando i 4π fgw LF
c j
2
d
1 , lo spettro risulta
indipendente da F, e se questo è maggiore, l’asintoto viene raggiunto per frequenze
sempre più basse [24].
Lo shot noise può essere ridotto aumentando la potenza del laser o la potenza
accumulata nell’inteferometro, ma mai completamente eliminato.
2.5.5 Fluttuazioni della pressione di radiazione
Le fluttuazioni della potenza del laser generate dalla sua stessa natura quantistica originano una pressione di radiazione aggiuntiva che fa muovere ciascuno
specchio. Lo spettro di questa varizione di pressione è:
S pr
1 g Pin 1
4m2 L2 π3 cλ f 4
(2.30)
Mentre lo shot noise è un rumore nella fase, questo provoca un reale spostamento degli specchi. Per ogni dato valore di Pin esiste una frequenza critica al
di sotto della quale le fluttuazioni nella pressione di radiazione domina sullo shot
noise, però per le potenze a disposizione attualmente questa frequenza è al di fuori
dell’intervallo coperto dai rivelatori, che risultano limitati dallo shot noise [24].
CAPITOLO 2. I RIVELATORI INTERFEROMETRICI
52
2.5.6 Instabilità del laser
Per quanto riguarda le instabilità nella frequenza, se ν f è la densità spettrale delle
fluttuazioni, si ha:
1 ν f ∆L 2
(2.31)
Sf f 2 ν L
dove ∆L è la differenza tra le lunghezze delle cavità ottiche dei due bracci.
Oltre alle fluttuazioni in frequenza, un laser ne ha anche in ampiezza, e queste
provocano variazioni nella potenza emessa, che risulta:
Pout
&
Pin δPin
1
2
Pin
δφ Affinchè non venga mascherato un eventuale segnale, deve essere
10 11 .
(2.32)
δPin
Pin
δφ
>
2.6 Sensibilità
Riassumendo tutti i contributi al rumore in un grafico, si ottiene la curva di sensibilità:
CAPITOLO 2. I RIVELATORI INTERFEROMETRICI
53
A seconda dell’intervallo di frequenza domina un certo tipo di rumore:
Sismico
grazie ai superattenuatori esso domina al di sotto di 3 4 Hz
Newtoniano il suo intervallo d’azione è tra i 2 ed i 10 Hz ; il doppio picco presente
a 7 Hz è dovuto al modo principale di oscillazione dei pendoli, ed è di
origine termica
Termico
da 10 a 30 Hz circa hanno la prevalenza le oscillazioni dei pendoli,
mentre da 30 fino a 500 Hz entrano in gioco i modi degli specchi
Shot
diventa prevalente al di sopra di 500 Hz.
I valori da cui è stato tracciato il grafico si riferiscono all’esperimento Virgo, tuttavia le differenze per gli altri strumenti saranno relative soltanto agli estremi degli
intervalli definiti.
CAPITOLO 2. I RIVELATORI INTERFEROMETRICI
54
Calcolata la sensibilità di un rivelatore è possibile stabilire un limite inferiore
alla frequenza gravitazionale osservabile senza che sia inesorabilmente coperta dal
rumore, per cui la frequenza minima della 1.30 è dettata dal rumore sismico, e
per Virgo è minore di circa un fattore 4 rispetto agli altri interferometri, grazie ai
superattenuatori. La frequenza massima, invece, è dovuta alla fisica delle sorgenti,
ed è limitata dall’ultima orbita stabile del sistema.
In base al numero di coalescenze galattico stimato ed al vaolre di sensibilità
di un interferometro, Belczynski, Kalogera e Bulik [2] hanno predetto il possibile
tasso di eventi rivelabili, che per LIGO, assumendo il modello evolutivo standard,
risulta essere 8 10
10
2
1 per
anno di cui 1 10
2 sono
i sistemi di stelle di neutroni, 2 misti, per cui il contributo predominante è dato dai buchi neri doppi (segnale
molto maggiore, quindi maggior probabilità di rivelazione). Purtroppo questi valori
cambiano significativamente a seconda dei modelli evolutivi, già nelle variazioni
apportate dagli autori citati sopra si ha un tasso che spazia nell’intervallo 2 10
3
2 eventi l’anno.
Attualmente esistono sei rivelatori interferometrici distribuiti sulla superficie
terrestre: Virgo (Cascina), con bracci di 3 km, LIGO che comprende tre rivelatori,
due coincidenti ad Hanford rispettivamente di lunghezza 4 e 2 km, ed uno a Livingston di 4 km, GEO (Hannover, Germania) di 600 m e TAMA (Giappone) 300
m.
Capitolo 3
Analisi mediante una rete di
interferometri
3.1 Introduzione
La possibilità di avere a disposizione non uno soltanto, ma più rivelatori di onde
gravitazionali, permette di effettuare una rivelazione considerando l’intera rete, e
porta notevoli vantaggi. Ciascun rivelatore opera per conto proprio nell’effettuare
le misure, il sistema rete entra in gioco al momento dell’analisi dei dati. Principalmente esistono due diversi approcci al problema, che verranno analizzati in
dettaglio, il più intuitivo consiste nell’analisi in coincidenza, che sostanzialmente confronta i dati provenienti dai vari rivelatori in cerca di un eventuale segnale
proveniente dal medesimo evento, mentre l’altro, detto coerente, considera la rete
come un unico rivelatore equivalente in posizione opportuna, una sorta di “sistema
di centro di massa”. Nel primo caso viene sensibilmente ridotta la probabilità di
falsi allarmi, in quanto vengono cercate, appunto, le coincidenze tra gli eventi misurati dai singoli rivelatori; il secondo metodo rappresenta la situazione ottimale
per il rapporto segnale rumore nel caso in cui quest’ultimo sia gaussiano, la presenza di rumore non gaussiamo purtroppo tende a sfavorire il metodo coerente a
favore di quello in coincidenza.
Ulteriore e forse principale vantaggio dal punto di vista astrofisico, è la possibilità di ricavare importanti informazioni sulle sorgenti, quali le masse, la posizione,
55
CAPITOLO 3. ANALISI MEDIANTE UNA RETE DI INTERFEROMETRI 56
i paramentri dell’orbita come l’inclinazione, e la distanza, particolarmente importante in quanto attualmente ci sono difficoltà nella determinazione delle distanze
su larga scala, problema che in futuro potrebbe avere come soluzione l’utilizzo di
candele standard gravitazionali.
3.2 Cenni sull’analisi con un singolo rivelatore
Vista l’impossibilità di riconoscere con assoluta certezza se sia stato effettivamente
misurato un segnale gravitazionale, in quanto esso si colloca al di sotto dalla soglia
di rumore, è inevitabile dover parlare di probabilità di rivelazione, e di conseguenza, cercare la statistica più appropriata al sistema, che risulta essere il metodo della
massima verosimiglianza. La verosimiglianza si definisce come il rapporto tra la
probabilità che il segnale sia presente nelle osservazioni, e la probabilità che non
lo sia.
La strategia adottata per l’analisi è il filtro adattato, che consiste nel filtrare i
dati con un modello teorico, e nel variare i parametri di quest’ultimo fino a che la
sovrapposizione con i dati non risulti massima. Assumendo che il rumore sia una
funzione additiva, un rivelatore misurerà:
x t
s t
n t
(3.1)
dove, in assenza di segnale, s t 0.
La correlazione tra dati e modello si definisce come [14] :
*
s x
k
2ℜ
a
∞
0
s̃ lm f x ˜f df
Sh f (3.2)
con x ˜f es ˜f rispettivamente la trasformata di Fourier di dati e modello, mentre Sh f è la densità dello spettro di potenza del rumore (determinato della 2.23
con la differenza che qui è definito solamente per frequenze positive) dipendente
dalle caratteristiche fisiche del rivelatore.
Nell’ipotesi di rumore gaussiano è possibile esprimere la verosimiglianza in
termini della sorta di prodotto scalare indotto dalla correlazione:
CAPITOLO 3. ANALISI MEDIANTE UNA RETE DI INTERFEROMETRI 57
LR 1
2
exp n
x s x s
*
1
2
exp n
infatti in assenza di segnale, per x
x x
*
k
k
(3.3)
n, l’uscita del rivelatore è una variabile
gaussiana, ma continua ad esserlo anche x s nel caso vi sia un segnale presente
nei dati.
L’espressione suggerisce di usare il proprio logaritmo naturale, per semplificare
i calcoli:
LLR *
s x
ko
1
2
s s
*
k
(3.4)
A questo punto, dal momento che il segnale potrebbe essere partito dalla sorgente ad un istante qualunque del tempo di integrazione, è necessario setacciare i dati “facendo scorrere” il modello lungo la loro sequanza temporale. La
correlazione diviene quindi una funzione del tempo:
C t
L
*
s x t k
(3.5)
La ricerca si interromperà quando dati e modello appariranno correlati tra loro,
e quindi sarà necessaria un’analisi più approfondita per determinare al meglio i
parametri dell’eventuale segnale; oppure alla fine della lista di dati, se in essi non
sarà presente alcun segnale rappresentabile col modello scelto.
Il segnale proveniente da un sistema binario dipende, nell’approssimazione
newtoniana, da una serie di parametri: le due masse, la distanza, la fase dell’onda
al momento della coalescenza, l’angolo di polarizzazione dell’onda, l’inclinazione
dell’orbita rispetto alla linea di vista dell’osservatore, la posizione della sorgente
nel cielo (in termini di declinazione e ascensione retta), il tempo di coalescenza,
ovvero l’istante in cui avviene il contatto tra le due stelle, la durata del segnale a
partire dalla minima frequenza rivelabile.
Il passo successivo consiste quindi nella massimizzazione dell’espressione precedente rispetto ai parametri di cui è possibile estrapolare informazioni dalla misura, nel caso di singolo rivelatore, il tempo di chirp e il tempo di coalescenza.
Determinare tutti gli otto paramentri significherebbe identificare completamente il
segnale rivelato (almeno nell’approssimazione scelta per il modello), così come la
CAPITOLO 3. ANALISI MEDIANTE UNA RETE DI INTERFEROMETRI 58
sorgente, ed iniziare a costruire mappe gravitazionali del cielo, che sarebbero per
lo più complementari alle altre esistenti, disegnate per via elettromagnetica, vista
la quasi totale invisibilità dei sistemi compatti ai rivelatori tradizionali.
3.3 Analisi in coincidenza
In questo tipo di analisi ciascun rivelatore effettua le proprie misure e compila una
lista di eventi. In un secondo momento, o in alcuni casi anche in tempo reale, le liste
dei vari strumenti vengono confrontate in cerca di coincidenze, segnali provenienti
dallo stesso evento registrati da più rivelatori. La selezione avviene sulla base di
una soglia comune determinata da una probabilità di falsi allarmi fissata in modo
da ottenere un certo valore del rapporto segnale-rumore.
Al fine di illustrarne il funzionamento più in dettaglio, è particolarmente esplicativo l’esempio dello studio effettuato da IGEC (International Gravitational Event
Collaboration), una collaborazione dei cinque rivelatori a barra ALLEGRO, AURIGA, EXPLORER, NAUTILUS e NIOBE [1]. La ricerca di IGEC si è focalizzata
sulle esplosioni di supernovae, tuttavia la procedura è generale, quindi applicabile
ad ogni tipo di segnale.
Come accennato in precedenza, il passaggio di un’onda gravitazionale attraverso una barra cilindrica isolata meccanicamente imprime una forza mareale che
fa vibrare il materiale secondo i suoi modi normali, facendolo entrare in risonanza
se la frequenza è esattamente quella del modo. Uno strumento risonante più leggero è accoppiato ed accordato col modo fondamentale longitudinale della barra,
ottenendo così due modi normali di vibrazione. Per ridurre al minimo il rumore
termico gli strumenti sono mantenuti a temperature criogeniche.
Ciascun gruppo di ricerca implementa un filtro ottimale per l’analisi dei dati,
dopodichè viene applicata ai dati filtrati una soglia di scambio, identica per ogni
rivelatore, che compie una prima selezione sulla base della quale sono complilate
le liste di candidati di eventi. La soglia di scambio è convenzionalmente fissata in
modo da avere un rapporto segnale-rumore compreso tra 3 e 5.
Al momento del confronto dei dati, che avviene tramite un protocollo di scambio, la procedura è la seguente:
CAPITOLO 3. ANALISI MEDIANTE UNA RETE DI INTERFEROMETRI 59
1. Il primo passo consiste nel determinare il valore di una soglia di ricerca,
un’ampiezza minima che i dati devono superare per poter essere considerati
segnale. Per far questo viene applicato l’algoritmo di analisi qui descritto a
diversi valori, sino a trovare il più ragionevole.
2. Vengono escluse dal tempo di osservazione di ciascun rivelatore quei periodi
dove la soglia di scambio al di sopra della soglia di ricerca, questo per limitare il numero di eventi reali sfuggiti alla misura di ampiezza superiore alla
soglia di ricerca scelta.
3. Finalmente vengono filtrati i dati eliminando i candidati con ampiezza al di
sotto della soglia di ricerca, il che riduce sensibilmente il numero di falsi
allarmi.
Questo metodo è adatto ad una ricerca isotropa nel cielo, senza direzioni preferenziali per la sorgente, tuttavia è possibile effettuare anche una ricerca mirata a
determinate zone modulando i dati scambiati con le sensibilità direzionali dei rivelatori. Più precisamente, tutte le ampiezze dovranno essere divise per il fattore
di attenuazione (dipendente dal tempo) per la direzione specifica del cielo. In una
ricerca mirata il tempo di osservazione è ridotto rispetto a prima a parità di soglia
di ricerca, in quanto non è più presente il tempo in cui lo strumento aspetta di allinearsi perfettamente con la sorgente. Come conseguenza della diminuzione del
tempo di integrazione, anche il rumore di fondo è ridotto. Purtroppo per questo
tipo di strumenti la selettività angolare è piuttosto povera, a causa della loro bassa
sensibilità direzionale: quando un rivelatore è orientato in una determinata direzione vede ogni sorgente nel raggio di
K
20 gradi al meglio con un’attenuazione
dell’11%.
I due grafici seguenti sono un esempio di selezione dei dati da parte di AURIGA, rispettivamente nel caso di ricerca alla cieca, e nella direzione del centro
galattico:
CAPITOLO 3. ANALISI MEDIANTE UNA RETE DI INTERFEROMETRI 60
La riga continua rappresenta l’ampiezza della soglia di scambio, i punti gli
eventi scambiati. Nell’intervallo di tempo grigio scuro non sono stati scambiati
dati, mentre l’area grigio chiaro rappresenta la regione di ampiezze escluse perché
al di sotto della soglia. Nella seconda immagine questa zona è più ampia, in quanto
la sensitività degli strumenti deve essere direzionata unicamente verso il centro
galattico, e le altre direzioni non vengono prese in considerazione.
Dopo aver ripetuto la procedura ed aver determinato la soglia più adatta, ciascun gruppo compila la propria lista di eventi, ed è possibile procedere con la
ricerca di coincidenze.
3.3.1 Ricerca della coincidenza temporale
Due eventi provenienti da diversi rivelatori si definiscono in coincidenza se le stime
dei rispettivi tempi di arrivo sono compatibili entro le varianze σ t2i e σt2j :
ti t j
2
∆ti j
k 0 σt2i
L
σt2j
∆tmax
(3.6)
dove ∆tmax è il tempo impiegato dalla luce a percorrere la distanza tra i due strumenti. La finestra di confidenza è calcolata in modo da avere una data probabilità
di eventi sfuggiti alla rivelazione fissando k con la disuguaglianza di BienaymèTschebyscheff. Quest’ultima asserisce che per una variabile casuale x con media
η, il valore assoluto della differenza tra x e la media ha una probabilità P di essere
maggiore di un certo valore ε :
P p x η
-
ε
2
E p x η
εn
n
(3.7)
CAPITOLO 3. ANALISI MEDIANTE UNA RETE DI INTERFEROMETRI 61
valida per ogni intero n per il quale esista il momento n-esimo di x E p x η
n
.
Invertendo la diseguaglianza è possibile calcolare ε data P. Risulta conveniente
usare la forma ε L kσ, in modo da trovare alla fine:
q
n
k
µ n ! < σn
P
(3.8)
dove µ n ! è il momento di ordine n. Per quanto riguarda il valore di soglia della
probabilità di eventi mancati, un P troppo grande rende la ricerca di coincidente
poco efficiente, al tempo stesso un valore significativamente al di sotto del 5%
ha l’effetto collaterale di guadagnare troppo poco in termini della probabilità di
rivelazione, a scapito dell’aumento dei falsi allarmi. La scelta intermedia di fissarlo
pari al 30% massimizza il rapporto tra l’efficienza di rivelazione e il corrispondente
numero di coincidenze accidentali.
3.3.2 Consistenza delle ampiezze
L’ampiezza di un segnale rivelato, come tutte le misure, è soggetta ad incertezze
sistematiche e statistiche dello strumento. Così, una volta trovati degli eventi in
coincidenza tra loro, è necessario verificare che le ampiezze stimate siano il più
vicino possibile in valore:
Ai A j
L
min r
∆Ai
∆A j
(3.9)
q
q
con ∆Ai j
∆Ai j
2
σ2A
i
σ2A
P
j
4
4t i
µAs
4t j
µAs
P
6σ2A σ2A
i
j
u
dalla diseguaglianza di Bienaymè e
P, come nel paragrafo precedente, probabilità di eventi mancati dal rivelatore.
Questo test elimina i falsi allarmi con un’efficienza fortemente dipendente dalla
soglia di ricerca. Essi sono ridotti significativamente soltanto ad una soglia alta,
a causa di due fattori: prima di tutto, la procedura usata per selezionare i dati
favorisce gli eventi che hanno ampiezze simili; in secondo luogo, le differenze in
ampiezza degli eventi accidentali possono essere maggiori per grandi valori del
rapporto segnale-rumore.
E’ necessario sottolineare una sostanziale differenza tra i rivelatori a barra e
quelli interferometrici in questa procedura. I primi sono allineati tra loro, (ciò è
CAPITOLO 3. ANALISI MEDIANTE UNA RETE DI INTERFEROMETRI 62
stato realizzato orientandoli in modo che fossero perpendicolari al cerchio massimo comune passante per i siti o il più vicino possibile) questo fa sì che abbiano
identiche figure d’antenna e che, se perfettamente calibrati, abbiano una risposta
alle sollecitazioni esterne perfettamente identica. I segnali relativi ad uno stesso
evento, quindi, dovrebbero risultare della stessa ampiezza entro la soglia di errore,
semplicemente traslati temporalmente dei ritardi dovuti alle diverse posizioni delle
barre rispetto alla sorgente. Il caso dei rivelatori interferometrici è più delicato,
in quanto essi non sono allineati né orientati allo stesso modo, ed ognuno ha una
propria figura di antenna che predilige una certa direzione nel cielo e una certa
polarizzazione dell’onda. Le ampiezze risultano diverse le une dalle altre, e nel
confrontarle in cerca di coincidenze è necessario tenere conto di queste differenze.
3.3.3 Stime del fondo
L’approccio ideale per stimare il fondo sarebbe quello di ottenere una nuove serie
di dati da una popolazione con la stessa statistica, ma privata delle sorgenti, applicarle l’algoiritmo di ricerca e dopo confrontare i risultati con quelli del campione
originale.
Questo è quasi realizzabile (nel caso che le sorgenti siano supernovae, o comunque eventi esplosivi pressochè impulsivi) con un accorgimento: se i dati rispettano le ipotesi ergodiche
1
è possibile realizzare un nuovo campione indipendente
applicando delle traslazioni relative alla coordinata temporale dei dati provenienti
dai vari strumenti. I ritardi artificiali devono superare in lunghezza la massima finestra temporale per la ricerca di coincidenze, ed allo stesso tempo brevi abbastanza
affinchè il numero di coincidenze accidentali si mantenga stazionario. Valori di
compromesso per le traslazioni sono tra i 5 e i 15 secondi.
Nonostante gli accorgimenti, tra gli eventi estrapolati rimane un certo numero
di falsi allarmi. Nel caso di segnali impulsivi come le esplosioni di supernovae
il contributo di ogni rivelatore al numero di coincidenze casuali (falsi allarmi in
coincidenza) è dato dal prodotto tra la deviazione standard della stima del tempo di
1 Ipotesi
ergodica: è possibile sostituire la media temporale su un certo sistema con la media su
un opportuno insieme di sistemi simili ad un determinato istante.
CAPITOLO 3. ANALISI MEDIANTE UNA RETE DI INTERFEROMETRI 63
arrivo e la sua frequenza di eventi λ mediate sul numero totale di candidati trovati:
σ̄t λ̄ ∑nie 1 σti
Toss
(3.10)
dove Toss è la durata totale delle osservazioni e le deviazioni standard vengono stimate con simulazioni Monte Carlo o misurando la risposta del rivelatore ad una
serie di sollecitazioni impulsive. La scelta della soglia di scambio è limitata da
due diversi fenomeni: un limite inferiore è dato dalla condizione che le stime delle
ampiezze e dei tempi di arrivo di ciascun evento debbano essere scorrelate, al tempo stesso un limite al numero di eventi scambiati al giorno tra i rivelatori pone un
taglio anche al tasso di falsi allarmi. Un valore di compromesso scelto da IGEC è
stato tale che il prodotto 3.10 sia minore dello 0,1%, dato il flusso massimo di 100
eventi giornalieri.
3.4 Analisi coerente
Il principio su cui è basato questo tipo di analisi è il considerare la rete come un
unico strumento di rivelazione, un tutto a cui ciascuna parte dà il proprio contributo.
Il rivelatore equivalente può essere idealmente posizionato su di uno già esistente,
oppure, più logicamente, essere immaginato al centro della Terra, in modo da farlo
essere equidistante da tutti gli altri.
CAPITOLO 3. ANALISI MEDIANTE UNA RETE DI INTERFEROMETRI 64
La teoria matematica per questo studio è stata elaborata da A. Pai, S. Dhurandhar e S. Bose [14], e verrà qui riportata in breve. L’idea, come già accennato,
è quella di considerare un rivelatore equivalente alla rete, di costruirne le funzioni statistiche necessarie, in modo che possa essere in grado di misurare eventi e
determinarne i parametri della forma d’onda.
Utilizzando le notazioni introdotte precedentemente, la verosimiglianza, essendo ciascun rivelatore indipendente dagli altri, sarà il prodotto di quelle di ciascuno
strumento, di conseguenza il suo logaritmo sarà dato dalla somma dei logaritmi:
LLRNW
M
∑
Ie 1
*
sI xI
k
I
1
2
*
sI sI
k
I
(3.11)
Il segnale all’uscita di ogni rivelatore, s I t , può essere scritto nella forma:
sI t 5
dove k
5
2G 3 Mc3 π f s !
c4 r
2X
3
ξ
2kℜ EIl SI t exp iδc è l’ampiezza, EI
(3.12)
gI T2p ψ ε 0 DIp la funzione d’an-
tenna, dipendente sia dalla posizione della sorgente, che da quella dello strumento
tramite i suoi angoli di Eulero (la funzione D Ip è una combinazione delle funzioni
CAPITOLO 3. ANALISI MEDIANTE UNA RETE DI INTERFEROMETRI 65
di Gel’fand di rango 2 2 Tsp degli angoli citati), in sostanza il guadagno in ampiezza introdotto dal rivelatore, infine S I t è l’espressione complessa e normalizzata
del segnale così come viene prodotto dalla sorgente, che ha per parte reale una
polarizzazione, per parte immaginaria l’altra:
SI t SoI t iSIπ t (3.13)
2
Con le notazioni introdotte, la seconda parte dell’espressione per la verosimiglianza logaritmica risulta essere:
*
s s
M
k
NW
∑
*
M
sI t s I t I
k
Ie 1
4k2 ∑ EIl E I
L
b2
(3.14)
Ie 1
essa rappresenta l’energia totale accessibile alla rete di rivelatori per un dato segnale.
3.4.1 Massimizzazioni analitiche
La massimizzazione della verosimiglianza può essere effettuata analiticamente per
quattro degli otto parametri: la radice dell’energia, b, che, a massa di chirp fissata
(dalla successiva massimizzazione rispetto al tempo di chirp), è funzione unicamente della distanza, per cui di fatto si massimizza rispetto alla distanza, ma in
modo più conveniente per i calcoli; la fase del’onda al momento della coalescenza,
δc , l’inclinazione dell’orbita rispetto al piano di vista, ε, e l’angolo di polarizzazione dell’ellisse ψ. Introducendo la quantità vettoriale C, che combina le correlazioni delle due polarizzazioni del modello di segnale normalizzato con i dati per ogni
rivelatore,
CI l
2 Le
cI0 icIπ
L
2
S I xI
*
k
(3.15)
I
funzioni di Gel’fand sono tensori così definiti:
Tml n P αβγ R
D
exp P
Q
i nα R exp P
Q
i mγ R Pml n P cos β R
dove
Pml n P x R
P
D
Q
1 R l H m in H m
2l P l Q m R ! v
P
P
l Q mR ! P l S nR ! P
1 Q xR
l S mR ! P l Q nR !
H
nw m
2 P
1 S xR
H
nx m
2
dl H
dxl H
n
n
P
y
1 Q xR
lH m
P
1 S xR
lz m{
CAPITOLO 3. ANALISI MEDIANTE UNA RETE DI INTERFEROMETRI 66
la verosimiglianza logaritmica alla fine delle massimizzazioni analitiche può
essere scritta (utilizzando la notazione di Einstein sulla somma sugli indici ripetuti)
come:
LLR 2b 5 δc 5 ε 5 ψ }|
CH |
2
2
PIJ θ ψ 6 cI0 t τ θ ψ ~ cJ0 t τ θ ψ cIπ t τ θ ψ cIπ t τ θ ψ 2
2
(3.16)
ovvero in sostanza come la norma del vettore delle correlazioni proiettato sul piano
di elicità, piano determinato dai due tensori D I 2 presenti nelle funzioni d’antenna,
e dipendenti soltanto dalla direzione della sorgente e dalle orientazioni dei rivelatori, e qui rappresentato dalla matrice PIJ . I τ esprimono invece i ritardi dei vari
strumenti rispetto al sistema madre, quello della rete, e sono dovuti alle diverse
posizioni di essi sulla superficie terrestre.
Nel caso di singolo rivelatore l’espressione per il logaritmo della verosimiglianza si riduce alla 3.5: infatti resterà l’elemento P11 della matrice P a moltiplicare la somma delle correlazioni corrispondenti alle due polarizzazioni dell’onda,
e dalla relazione che lega S I ad sI si ricava esattamente la stessa formula. E’ interessante notare come con un singolo rivelatore non sia possibile ricavare alcuna
informazione sulla posizione della sorgente, nè sulla distanza, in quanto essendo
presente soltanto un’ampiezza, l’unico parametro di cui si abbia una stima è la
massa di chirp del sistema.
Nel procedere con l’analisi risulta più conveniente, invece di usare la norma
quadra di CH , definire come statistica di rete L L
|
CH | .
3.4.2 Massimizzazione rispetto al tempo di coalescenza
Al fine di massimizzare rispetto al tempo di coalescenza nel riferimento del network, apporta una notevole riduzione ai costi computazionali passare alla trasformata di Fourier: calcolata per la correlazione C I di ciascun rivelatore, e parametrizzata la differenza tra modello e dati come ∆t c L tc tc , la dipendenza da ∆tc sarà
presente soltanto in un fattore di fase, sarà quindi possibile avere C I ∆tc al variare
del parametro, con facilità. Applicando loro la trasformata inversa, si ottiene:
7
CAPITOLO 3. ANALISI MEDIANTE UNA RETE DI INTERFEROMETRI 67
CI l ∆tc ;tc ξ θ φ *
SI t
τI θ φ ;tc
∆tc ξ xI t;tc ξ k
I
(3.17)
dove le quantità primate si riferiscono al modello, le altre ai dati. I τ I θ φ sono i ritardi di ciascun rivelatore rispetto al “fide”, come viene chiamato il sistema
della rete; il loro valore dipende strettamente dalla posizione della sorgente, e la
loro esistenza deriva dalla propagazione finita, e con velocità pari a quella della
luce, delle onde gravitazionali, motivo per cui a ciascun rivelatore arriveranno a
tempi diversi (se il fide è posto al centro della Terra, τ I 2 Rc ). Se i valori che
saranno scelti per ξ ϑ φ (il criterio è esplicitato nel sottoparagrafo successivo)
riproducono perfettamente l’eventuale segnale presente nei dati, la correlazione è
massima quando ∆tc compensa esattamente la differenza t c tc , da cui si ricava la
miglior stima per il tempo di coalescenza.
3.4.3 Griglia di parametri e determinazione delle incertezze
Per quanto riguarda i restanti parametri è necessario procedere invece in modo diverso. Al variare delle possibili posizioni nel cielo, ciascun rivelatore spazzerà una
regione finita di valori del ritardo, ma dato che i dati sono campionati discretamente, verrà a formarsi una griglia, necessariamente composta da un numero finito di
modelli. Se ad esempio la rete è costituita da due rivelatori è conveniente considerare come fide uno di essi, da cui è evidente che c’è un unico ritardo significativo,
che assumerà valori nell’intervallo
d1
c
6 2
d1
c
2
7
, dove d1
2
è la distanza tra i due
strumenti; se ∆ è l’intervallo di campionamento (dell’ordine di 0.5 ms), allora il
numero di punti della griglia di modelli è dato da:
nΩ
2τ1
∆
2
(3.18)
Nel caso di network di tre rivelatori i ritardi significativi sono due, ed i valori
permessi loro formano un’ellisse nel piano dei parametri (infatti ognuno assumerà
valori in un intervallo, ed essendo in generale i due intervalli diversi tra loro, la
CAPITOLO 3. ANALISI MEDIANTE UNA RETE DI INTERFEROMETRI 68
regione di piano delimitata risulta un’ ellisse), di equazione:
τ21
2
τ21
3
d1
d1
3 2
2
2
d1
d1
3
2
cos α2 3 τ2 τ3 Y
d1 3
sin α2
c
3
2
0
(3.19)
con α2 3 angolo di vertice il primo rivelatore, e lati le congiungenti ad esso rispettivamente del secondo e del terzo. Ogni punto in questa regione rappresenta una
coppia di ritardi, corrispondenti ad una determinata posizione nel cielo θ φ . Il
numero di modelli nella griglia sarà:
2πA
c2 ∆2
nΩ
(3.20)
dove A è l’area del triangolo che ha per vertici i tre rivelatori. Per la rete composta
da Virgo e i due LIGO il numero stimato è 3 10 3 . In un sistema di tre elementi, i due ritardi indipendenti formano due circonferenze nella sfera celeste, che si
intersecano in due punti, per cui le possibili posizioni della sorgente sono due.
Questa ambiguità può essere risolta aggiungendo un quarto rivelatore che in generale giacerà fuori dal piano formato dai primi, i ritardi significativi diventano tre, e
la regione permessa è la superficie di un’ellissoide, mentre il numero di punti della
zona permessa risulta il doppio rispetto al caso precedente:
nΩ
4πA
c2 ∆2
(3.21)
con la differenza che adesso A indica l’area del minimo triangolo tra tutti i possibili con vertici i rivelatori. Aumentando ulteriormente il numero di elementi le
informazioni ricavabili sulla posizione della sorgente sono ridondanti, ma possono
essere usate per ridurre l’errore sugli angoli dovuta alla presenza di rumore.
Inevitabile conseguenza del campionamento discreto è una possibile non perfetta sovrapposizione tra la reale posizione della sorgente, e quella del campione che meglio l’approssima, che porta ad una riduzione percentuale del rapporto
segnale-rumore. Convenzionalmente viene accettata una perdita massima del 3%.
Se la griglia è troppo fitta, e la perdita massima risulta minore, ci sarà un eccessivo
sforzo computazionale, mentre se è troppo spaziata, alcuni eventi rischieranno di
essere persi tra le maglie.
Al fine di determinare al meglio la spaziatura della griglia in funzione del-
CAPITOLO 3. ANALISI MEDIANTE UNA RETE DI INTERFEROMETRI 69
l’errore sulla stima dei parametri, viene usato un approccio geometrico ideato da
Owen [13, 12] , che consiste nell’introdurre una metrica nello spazio dei parametri, la cui inversa è proporzionale alla matrice covarianza. Nell’approssimazione
newtoniana lo spazio dei parametri, generato da quelli rispetto cui non è possibile
massimizzare analiticamente, è quadridimensionale, e, in analogia con la Relatività Generale, le coordinate vegono espresse come coordinata temporale ϑ 0
coordinate spaziali
ϑi
Lor
L
tc e
ξ θ φ u , dopodichè, visto che la massimizzazione rispetto
a tc viene effettuata tramite la trasformata di Fourier, la griglia di modelli occorre
solamente per le coordinate spaziali. La metrica ristretta all’ipersuperficie, se g αβ
è la metrica quadridimensionale, è
γi j
gi j
g0i g0 j
g00
(3.22)
dove vale la convenzione per cui gli indici latini si riferiscono alle quantità spaziali.
Per ottenere il numero di modelli si calcola il volume proprio dello spazio dei
parametri tramite γi j
v
M
sp
param
a
det γi j d 3 ϑ
(3.23)
e lo si moltiplica per la densità numerica dei modelli, funzione della spaziatura µ
ρ3
1
2
3
µ
3
(3.24)
L’espressione per la metrica dell’intero spazio si ricava espandendo la statistica di
rete L normalizzata ad uno, attorno al suo massimo, che si ha quando il segnale
coincide perfettamente con uno dei modelli:
L ϑ ∆ϑ &
1
1 ∂2 L 2 ∂ϑα ∂ϑβ
∆ϑ e 0
∆ϑα ∆ϑβ
(3.25)
in quanto il termine contenente la derivata prima è nullo, essendo L massimo per
∆ϑ 0. La metrica è così definita:
gαβ
LB
1 ∂2 L 2 ∂ϑα ∂ϑβ
∆ϑ e 0
(3.26)
CAPITOLO 3. ANALISI MEDIANTE UNA RETE DI INTERFEROMETRI 70
da questa è possibile calcolare la sua restrizione alla parte spaziale, γ i j , che da un
punto di vista statistico rappresenta l’informazione di Fisher 3 per un segnale di
ampiezza unitaria. Il suo inverso è la matrice covarianza, i cui elementi diagonali
sono le varianze sulle stime dei parametri ottenute con una determinata griglia. Per
un segnale di ampiezza arbitraria sarà necessario riscalarli dividendo per la radice
dell’ampiezza:
σi
M
γii
b
(3.27)
Con questo procedimento è possibile dunque trovare una relazione diretta tra il
numero di modelli della griglia e l’accuratezza dei parametri che si otterranno utilizzandola. Nella scelta purtroppo è necessario scendere a compromessi con i costi
computazionali, che pongono limiti inferiori alla spaziatura della griglia; tuttavia successivamente, una volta scelto il modello che più approssima il segnale tra
quelli della griglia, è possibile raffinare l’accuratezza sui parametri e ridurre così
l’incertezza sulla loro stima.
Per sottolineare i vantaggi dell’analisi coerente è utile l’espressione per l’energia accessibile alla rete 3.14 : nel caso di rivelatori con sensibilità identiche
essa è proporzionale al numero di elementi, nella situazione più realistica di curve di rumore diverse, la sensibilità del network risulta essere la media pesata di
quelle dei singoli strumenti. In questo modo i rivelatori più sensibili contribuiranno maggiormente alla rivelazione, che risulterà ottimale. La maggior sensibilità
della rete rispetto a quella dei singoli strumenti si traduce in un aumento del rapporto segnale-rumore misurabile, e di conseguenza un allargamento dell’orizzonte
osservabile per via gravitazionale. Il rapporto segnale-rumore, infatti, diminuisce
all’aumentare della distanza, presente nel fattore k.
La ricerca coerente è però ottimale soltanto nel caso ideale di rumore totalmente Gaussiano. Nella realtà si presentano degli eventi spuri non Gaussiani, che
danno luogo a lunghe code nella distribuzione del rapporto segnale-rumore della
rete. Esiste un metodo, detto test di consistenza, che filtra gli eventi dai falsi allarmi basandosi sulla distribuzione di frequenza attesa per le coalescenze, ma non
3 Esiste un limite inferiore alla varianza di un parametro, dato da un caso particolare della disu1
guaglianza di Cramer-Rao: Var P α R
2 . Il termine al denominatore è detto informazione
P ∂
E
∂α lnL R
di Fisher, e nel caso di più parametri è una matrice.
CAPITOLO 3. ANALISI MEDIANTE UNA RETE DI INTERFEROMETRI 71
riesce comunque a riportare il numero di falsi allarmi sotto la soglia prestabilita
(non maggiore di 1 evento l’anno [20] ). Per evitare questo inconveniente è necessario analizzare i dati con il metodo della coincidenza, avendo prima verificato se
sia conveniente dal punto di vista della perdita di rapporto segnale-rumore.
Capitolo 4
Confronto tra i due metodi
4.1 Introduzione
Per poter sfruttare al meglio le scarse informazioni celate dal rumore che una sorgente concede a ciascun rivelatore ed essere in grado di costruire un osservatorio
astronomico gravitazionale, che aprirebbe la strada ad una nuova branca dell’Astrofisica e permetterebbe di studiare in modo diretto oggetti estremamente compatti
quali le stelle di neutroni ed i buchi neri, è necessario elaborare una strategia ideale
per l’ analisi dei dati della rete di rivelatori.
I due metodi efficienti per questo tipo di analisi sono stati presi in esame nel
capitolo precedente, il metodo coerente e quello in coincidenza, ciascuno con i
rispettivi vantaggi e svantaggi. Per decidere quale sia il più appropriato può essere
utile un confronto diretto applicandoli agli stessi dati simulati e confrontando i
risultati ottenuti. In questo lavoro di tesi è stato effettuato il parallelo per una rete
composta da Virgo e dai tre LIGO, il programma elaborato mediante Mathematica
permette comunque di modificare i componenti della rete a seconda delle esigenze.
La quantità rilevante per il paragone è la probabilità di rivelazione come funzione della distanza, che è una stima dell’ orizzonte osservabile per ogni coppia di
masse delle stelle, una volta fissata la soglia di probabilità a partire dalla quale si
ritiene significativa la presenza di un evento rispetto ai falsi allarmi. In prima approssimazione non ci sono direzioni privilegiate nel cielo per la ricerca di binarie
coalescenti -in realtà non è proprio così, infatti l’omogeneità dell’Universo è tale
72
CAPITOLO 4. CONFRONTO TRA I DUE METODI
73
solo su larga scala, per distanze dell’ordine delle decine di Megaparsec non è più
valida, ed inizia ad essere determinante la presenza di strutture- per cui le simulazioni sono state fatte creando artificialmente gli eventi con il metodo Monte Carlo
per i quattro parametri angolari (posizione, polarizzazione dell’onda e inclinazione
dell’orbita rispetto al piano di vista). Ogni simulazione crea 10 4 eventi, corrispondenti appunto a direzione, inclinazione e polarizzazione casuali, il numero è stato
scelto in modo tale che fosse più grande possibile, compatibilmente con la durata
di ciascuna simulazione, così da poter avere un campione ragionevolamente vasto
di misure, in grado di fornire risultati verosimili in un’analisi statistica.
4.2 Verifica della consistenza del programma
Prima di effettuare le simulazioni utili al confronto è stato verificato che i risultati
prodotti dal programma fossero consistenti con le sensibilità dei singoli rivelatori.
Un ulteriore test al programma è stato eseguito per quanto riguarda l’andamento del rapporto segnale-rumore (SNR) in funzione della distanza per un singolo
rivelatore di LIGO, più precisamente quello di 4 km situato ad Hanford. Il rapporto segnale-rumore è definito come il valore di aspettazione del segnale nell’ipotesi che esso sia presente nei dati, diviso per la varianza nell’ipotesi in cui non vi
sia segnale nei dati. Nel caso specifico delle binarie coalescenti, con le notazioni
introdotte precedentemente (cap. 2) si traduce in:
*
SNR X
*
s x k
s s
(4.1)
k
poichè in assenza di segnale il rumore è assunto gaussiano con media nulla e
varianza E 6 * s n
k
*
n s
k
7
*
s s
[21].
k
Per un singolo rivelatore la verosimiglianza logaritmica è data semplicemente
dal modulo della correlazione C I tra dati e modello
L
CI
0
cI02
cIπ2
(4.2)
2
Dall’ortonormalità tra sI0 e sIπ si ha che la covarianza tra cI0 e cIπ è nulla, mentre le
2
2
rispettive varianze sono uguali a uno, ed in assenza di segnale hanno media nulla.
CAPITOLO 4. CONFRONTO TRA I DUE METODI
74
Per cui L2 risulta un χ2 a due gradi di libertà, essendo la somma dei quadrati di due
variabili gaussiane con media zero e varianza uno, e le probabilità di falso allarme
e rivelazione diventano:
PFA L2 PDET L2 b0 ∞
a
exp L2
(4.3)
b0
exp n y b20 I0 2 0 y b20 dy
(4.4)
Mentre per il rapporto segnale-rumore si ha:
0
SNR
16k4 E I l E I 2
sI0 x
6 *
k
2
X
2k E I l E I
*
sIπ x
2
k
2
7
X
X
2 2k E I l E I
(4.5)
pari alla radice del doppio dell’energia accessibile al rivelatore.
Questo è proporzionale al segnale tramite l’ampiezza k, è quindi possibile studiarne l’andamento al crescere della distanza, per poter determinare i confini dell’universo osservabile con uno strumento. E’ stato quindi possibile testare l’attendibilità del programma verificando che le massime distanze raggiungibili dal
rivelatore di 4 km presente ad Hanford calcolate fossero, a parità di masse, le stesse dichiarate dall’esperimento LIGO[23]. Convenzionalmente infatti viene presa da LIGO come soglia al di sotto della quale non ha senso considerare misure
attendibili, un rapporto segnale-rumore mediato sui quattro angoli di posizione,
polarizzazione e inclinazione, pari a 5,5.
I sistemi di stelle di neutroni sono assunti gemelli con masse pari alla massa di
Chandraseckar per un gas degenere di elettroni (1,4 masse solari). Dato il piccolo
intervallo di masse di questo tipo di stelle (a circa 2,3-3 masse solari a seconda del
modello di equazione di stato si raggiunge già la massa di Chandrasekhar per un
gas degenere di neutroni e la stella collassa a buco nero) è sufficiente quest’ unico
valore di masse per cui calcolare la distanza massima raggiungibile. I risultati
ottenuti sono riassunti nel grafico seguente:
CAPITOLO 4. CONFRONTO TRA I DUE METODI
75
Rapporto segnale-rumore
SNR LIGO H4k
10
9,5
9
8,5
8
7,5
7
6,5
6
5,5
5
4,5
4
3,5
3
2,5
2
1,5
1
0,5
0
1,4-1,4 masse solari
0
5
10
15
20
25
30
35 40 45 50
Distanza (Mpc)
55
60
65
70
75
80
Le simulazioni danno come risultato circa 21 Megaparsec, in buono accordo
con i 20 calcolati da LIGO. La differenza residua è probabilmente dovuta a dettagli
trascurati nel calcolo della curva di sensibilità, che non risultava perfettamente
identica a quella presente sul sito di LIGO.
Per quanto riguarda i sistemi misti, la massa della stella di neutroni è lasciata fissa a 1,4 masse solari per i motivi espressi in precedenza, mentre i buchi neri
variano da un minimo di 2,4 ad un massimo di 10 masse solari. E’ altamente improbabile che buchi neri più massicci si leghino in sistemi binari con oggetti troppo
più piccoli, il che sommato alla considerazione che la durata della fase di spiraleggio sarebbe molto breve giustifica l’aver trascurato questi sistemi. Le distanze
raggiungibili in questo caso variano da 25 Mpc a 42 Mpc, e i grafici elaborati dal
programma hanno dato come risultato:
CAPITOLO 4. CONFRONTO TRA I DUE METODI
76
Rapporto segnale-rumore medio
LIGO H4k
10
9,5
9
8,5
8
7,5
7
6,5
6
5,5
5
4,5
4
3,5
3
2,5
2
1,5
1
0,5
0
sistemi misti
1,4-2,4 masse solari
1,4-10 masse solari
0
10
5
15
20
25
30
35 40 45 50
Distanza (Mpc)
55
60
65
70
75
80
che sono valori ragionevolmente realistici considerando le approssimazioni fatte. La forma d’onda è quella newtoniana, mentre per il calcolo della frequenza massima prima dell’impatto è stata usata l’approssimazione post-newtoniana al secondo ordine. L’energia orbitale, diminuendo a causa dell’irraggiamento, raggiungerà
un valore minimo oltre cui le due stelle non saranno più in equilibrio, ed il sistema
colasserà su se stesso. Il minimo dell’energia corrisponde alla cosiddetta ultima orbita stabile, dopodichè inizierà il processo di fusione dei due corpi, ma al momento
vi sono delle incertezze nei modelli che descrivano l’irraggiamento gravitazionale
in questa fase, per cui qui è stata esaminata soltanto la parte precedente al contatto.
Nell’approssimazione post-newtoniana al secondo ordine l’energia minima è
ELSO
dove x
L
πM f 1
1
1
ηM 1 η x 27 19η η2
9
b
2
12
8
2 3
3
x2 c
(4.6)
con M massa totale del sistema, f frequenza gravitazionale
istantanea, ed η rapporto tra massa ridotta e massa totale. Perciò la frequenza
gravitazionale alla quale il sistema termina la propria esistenza è:
1 2 M 1539 1008η 19η2 9 η /
πM .
3 81 57η η2 fLSO
3
2
Hz
(4.7)
CAPITOLO 4. CONFRONTO TRA I DUE METODI
77
Al crescere delle masse il taglio al segnale alla frequenza dell’ultima orbita
stabile diviene sempre più imponente, poiché il chirp viene interrotto via via a
frequenze minori. Parallelamente i risultati ottenuti dalle simulazioni si discostano
in misura maggiore dalle previsioni di LIGO, e ciò con molta probabilità è dovuto
ad un modello diverso usato per il calcolo dell’ultima orbita stabile; per buchi neri
relativamente piccoli (5 masse solari) essa è ancora poco evidente, 62,5 megaparsec
contro i 58 di LIGO.
Il limite massimo di misurabilità per LIGO è una massa totale di 30 masse
solari, al di là della quale, oltre ad essere poco popolato l’Universo, dato che la
funzione di massa è proporzionale ad m
2
7
, la fase di spiraleggio e irraggiamento
sarebbe troppo breve per poter sperare statisticamente di riuscire a rivelarla. Nel
caso di sistemi gemelli di 15 masse solari ciascuno, i problemi dati dai diversi
modelli risultano più evidenti: LIGO dichiara l’orizzonte osservativo a 105 Mpc,
mentre il programma di Mathematica calcola un rapporto segnale-rumore pari a
5,5 addirittura a 150 Megapaesec:
Rapporto segnale-rumore medio
LIGO H4k
10
9,5
9
8,5
8
7,5
7
6,5
6
5,5
5
4,5
4
3,5
3
2,5
2
1,5
1
0,5
0
sistemi di buchi neri
15-15 masse solari
5-5 masse solari
0
10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180
Distanza (Mpc)
CAPITOLO 4. CONFRONTO TRA I DUE METODI
78
4.3 Calcolo delle probabilità di rivelazione
Prima della descrizione dell’analisi parallela è necessario definirne le regole e le
espressioni per le quantità utilizzate. Quella fondamentale è la probabilità di rivelazione, che per un singolo strumento è data dalla 4.4, per l’intera rete è definita
in modi diversi a seconda del metodo di analisi, dei quali per comodità è riportata
una breve descrizione:
Coincidente: ciascun rivelatore esegue l’analisi in maniera indipendente e compila la propria lista di eventi (se ne ha misurati), successivamente queste vengono confrontate per cercare una coincidenza doppia (almeno
due strumenti hanno misurato lo stesso evento) o tripla. Prendendo in
prestito i nomi dal linguaggio booleano, esse vengono dette più brevemente AND2 e AND3. Le probabilità di rivelazione vengono calcolate
sotto la ragionevole ipotesi di strumenti indipendenti tra loro, e quindi
scorrelati, per cui l’espressione per la coincidenza doppia è data da:
Pdet coi2
1
.
4
∏ P0I
Ie 1
4
∑
I 5 J5 K 5 Y e 1
I
αIJKY PDET
P0J P0K P0Y /
(4.8)
calcolata come complemento alla probabilità che nessuno o uno solo
tra i quattro rivelatori misuri l’evento. α IJKY è puramente simbolico, e
sta ad indicare le permutazioni significative tra gli elementi della rete.
Analogamente, la probabilità di rivelazione per l’AND3 ha la forma:
Pdet coi3
1 B ∏4I e
I
P0J P0K P0Y
∑4I 5 J 5 K 5 Y e 1 αIJKY PDET
IJKY PI
J
K Y
1α
DET PDET P0 P0
I
1 P0
∑4I 5 J 5 K 5 Y e
(4.9)
dove PDET indica la probabilità di rivelazione di un singolo rivelatore, dipendente dalla soglia e dall’energia del segnale, mentre P0 è la
probabilità che lo strumento non riveli l’evento.
Coerente:
viene idealmente costruito un rivelatore equivalente che provveda ad
analizzare i dati sommando coerentemente i contributi di ciascun elemento della rete. Con le notazioni introdotte in precedenza, la statistica di network L2 risulta essere un χ2 a quattro gradi di libertà, infatti
CAPITOLO 4. CONFRONTO TRA I DUE METODI
79
la 3.16può essere riscritta come:
L2
c0
2
2
cπ 2
c0
2
cπ 2
2
(4.10)
dove ciascun termine è il quadrato di una variabile Gaussiana con media nulla e varianza unitaria in assenza di segnale nei dati. Per un χ 2
a quattro gradi di libertà le probabilità di falso allarme e di rivelazione
risultano essere rispettivamente:
PFA L2 PDET L2 b0 ∞
a
L2
L2 exp L2
(4.11)
L2
exp n y b0 I1 2 M yb0 dy
b0
(4.12)
1
E’ importante sottolineare le differenti espressioni per le probabilità nei due casi, in
quanto soltanto calcolandole nel modo giusto, e non utilizzando anche per il rivelatore equivalente alla rete una statistica a due gradi di libertà, è possibile stabilire
un confronto veritiero tra le due strategie.
4.4 Risultati ottenuti
Le simulazioni sono state eseguite mediando su 10 4 quadruplette di angoli generate
in modo casuale, facendo variare la distanza della sorgente in modo discreto, sino a
valori fisicamente interessanti (intorno alle soglie di osservabilità). Per ogni valore
della distanza il programma calcola le probabilità di falso allarme (normalizzate
ad 1 falso evento annuo) e di rivelazione sia per i singoli strumenti che per la rete,
dopodichè per il caso coerente media semplicemente quest’ultima sui quattro angoli. Nell’analisi in coincidenza, sempre mediando sugli angoli, calcola i quantili
più rilevanti delle probabilità in modalità AND2 ed AND3, e successivamente ne
valuta le due medie.
Essendo impossibile far variare in modo continuo le masse, sono stati scelti
soltanto alcuni valori più significativi: come detto in precedenza, per le stelle di
neutroni viene presa convenzionalmente pari a 1,4 masse solari, mentre per i buchi
neri è fatta variare da 2,4 a 10 masse solari quando sono in coppia con una stella di
CAPITOLO 4. CONFRONTO TRA I DUE METODI
80
neutroni, da 5 a 15 quando il compagno è un altro buco nero. In queste simulazioni
sono stati considerati soltanto gli estremi di ciascun gruppo a causa della lunga
durata di ciascuna di esse.
Per apprezzare maggiormente le differenze che apporta un’analisi in rete rispetto a quella di un singolo rivelatore sono state effettuate simulazioni prima per i
singoli LIGO (già una piccola rete, essendo costituito da tre strumenti), e Virgo, e
successivamente per la rete dei due.
4.4.1 LIGO
La rete rappresentata da LIGO comprende i due rivelatori presenti ad Hanford,
rispettivamente di 4 e 2 km, e quello a Livingston, anch’esso di 4 km. Una caratteristica particolare è che, facendo parte dello stesso esperimento, questi sono stati costruiti con identica orientazione, il che semplifica il lavoro dell’analisi
coincidente.
Prima di procedere con l’analisi in rete, e per avere un quadro di partenza da
confrontare poi con le probabilità ottenute facendo operare simultaneamente più
rivelatori, sono state effettuate delle simulazioni (per i valori di masse significativamente interessanti) con un singolo strumento di LIGO acceso, più precisamente
quello di 4 km presente ad Hanford, ed i risultati sono riassunti in figura:
LIGO Hanford 4km
1
0,9
1,4-1,4 masse solari
1,4-2,4 masse solari
1,4-10 masse solari
5-5 masse solari
15-15 masse solari
Probabilita di rivelazione media
0,8
0,7
0,6
0,5
0,4
0,3
0,2
0,1
0
0
10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180
Distanza (Mpc)
CAPITOLO 4. CONFRONTO TRA I DUE METODI
81
L’orizzonte osservabile aumenta al crescere della massa, poiché il segnale è
più intenso, e questo fa sì che rimanga al di sopra della soglia per distanze via via
maggiori.
Per quanto riguarda la rete dei tre interferometri ci si aspetta che la probabilità
di rivelazione aumenti, in quanto è maggiore la quantità di energia catturata, nel
caso coerente è addirittura la somma delle tre. I grafici seguenti mostrano la probabilità media di rivelazione come funzione della distanza, e sono suddivisi in tre
categorie: i sistemi di stelle di neutroni, quelli composti da un buco nero compagno
di una stella di neutroni, e i sistemi di buchi neri.
Rete LIGO
1,4-1,4 masse solari
1
0,9
Coincidente 2/3
Coerente
Coincidente 3/3
Probabilita media di rivelazione
0,8
0,7
0,6
0,5
0,4
0,3
0,2
0,1
0
0
5
10
15
20
30
25
Distanza (Mpc)
35
40
45
50
CAPITOLO 4. CONFRONTO TRA I DUE METODI
82
Rete LIGO
sistemi misti
1
Coincidente 2/3 1,4-2,4 masse solari
Coerente 1,4-2,4 masse solari
Coincidente 3/3 1,4-2,4 masse solari
Coincidente 2/3 1,4-10 masse solari
Coerente 1,4-10 masse solari
Coincidente 3/3 1,4-10 masse solari
0,9
Probabilita media di rivelazione
0,8
0,7
0,6
0,5
0,4
0,3
0,2
0,1
0
0
5
10
15
20
25
30
35 40 45 50
Distanza (Mpc)
55
60
65
70
75
80
Rete LIGO
sistemi di buchi neri
1
Coincidente 2/3 5-5 masse solari
Coerente 5-5 mase solari
Coincidente 3/3 5-5 masse solari
Coincidente 2/3 15-15 masse solari
Coerente 15-15 masse solari
Coincidente 3/3 15-15 masse solari
0,9
Probabilita media di rivelazione
0,8
0,7
0,6
0,5
0,4
0,3
0,2
0,1
0
0
10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180
Distanza (Mpc)
4.4.2 Virgo
A causa della sensiblità leggermente minore, che raggiunge circa il 75% di quella
dei due LIGO di 4 km, le distanze raggiungibili da Virgo sono in media il 25%
minori, come è possibile notare in figura:
CAPITOLO 4. CONFRONTO TRA I DUE METODI
83
Virgo
1
0,9
1,4-1,4 masse solari
1,4-2,4 masse solari
1,4-10 masse solari
5-5 masse solari
15-15 masse solari
Probabilita di rivelazione
0,8
0,7
0,6
0,5
0,4
0,3
0,2
0,1
0
0
10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180
Distanza (Mpc)
E’ interessante notare però che Virgo osserva a partire da frequenze più basse,
per cui in linea di principio gli è possibile rivelare segnali da sistemi di buchi neri
più massicci di 15 masse solari, grazie alla loro permanenza nella banda accessibile
allo strumento per un intervallo di tempo tale da poter essere misurati.
4.4.3 Rete Virgo-LIGO
Le simulazioni effettuate con la rete completa mostrano che Virgo contribuisce
con un allargamento dell’orizzonte di circa il 12% sia nel caso coerente che con
gli interferometri operanti in coincidenza doppia rispetto alla minirete LIGO, il
che, nell’ipotesi di distribuzione uniforme, corrisponde ad un aumento di circa il
40% del numero delle sorgenti osservabili. Il seguente grafico mostra il contributo
di Virgo alla rete nel caso di sistemi di stelle di neutroni, per le altre masse la
percentuale è comunque costante:
CAPITOLO 4. CONFRONTO TRA I DUE METODI
84
Contributo di Virgo alla rete
sistemi di stelle di neutroni
1
0,9
Coincidente 2/3 rete LIGO
Coerente rete LIGO
Coincidente 2/4 rete Virgo-LIGO
Coerente rete Virgo-LIGO
Probabilita media di rivelazione
0,8
0,7
0,6
0,5
0,4
0,3
0,2
0,1
0
0
5
10
15
20
30
25
Distanza (Mpc)
35
40
45
50
Il parallelo tra i due metodi viene rappresentato nei grafici sottostanti, che descrivono l’andamento della probabilità media con la distanza della sorgente, nei
casi di analisi coerente ed in coincidenza doppia e tripla. Ciascuna figura contiene
una tipologia di sistemi al variare della massa, come nel sottoparagrafo 4.4.1.
Rete Virgo-LIGO
1,4-1,4 masse solari (stelle di neutroni)
1
0,9
Coincidente 2/4
Coerente
Coincidente 3/4
Probabilita media di rivelazione
0,8
0,7
0,6
0,5
0,4
0,3
0,2
0,1
0
0
5
10
15
20
30
25
Distanza (Mpc)
35
40
45
50
CAPITOLO 4. CONFRONTO TRA I DUE METODI
85
Rete Virgo-LIGO
sistemi misti
1
0,9
Coincidente 2/4 1,4-2,4 masse solari
Coerente 1,4-2,4 masse solari
Coincidente 2/4 1,4-10 masse solari
Coerente 1,4-10 masse solari
Coincidente 3/4 1,4-2,4 masse solari
Coincidente 3/4 1,4-10 masse solari
Probabilita media di rivelazione
0,8
0,7
0,6
0,5
0,4
0,3
0,2
0,1
0
0
5
10
15
20
25
30
35 40 45 50
Distanza (Mpc)
55
60
65
70
75
80
Rete Virgo-LIGO
sistemi di buchi neri
1
Coincidente 2/4 5-5 masse solari
Coerente 5-5 masse solari
Coincidente 2/4 15-15 masse solari
Coerente 15-15 masse solari
Coincidente 3/4 5-5 masse solari
Coincidente 3/4 15-15 masse solari
0,9
Probabilita media di rivelazione
0,8
0,7
0,6
0,5
0,4
0,3
0,2
0,1
0
0
10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180
Distanza (Mpc)
Dalle simulazioni effettuate risulta evidente la superiorità del metodo coerente,
bisogna ricordare però che le ipotesi di rumore completamente gaussiano non sono
realistiche, e che la presenza di eventi non gaussiani penalizza fortemente l’analisi
coerente, non sempre in grado di filtrare questi falsi allarmi. Sebbene abbia un orizzonte osservativo più ristretto di circa il 25%, quindi, un buon compromesso risulta
la strategia coincidente, che consente un miglior filtraggio dei dati gravitazionali.
CAPITOLO 4. CONFRONTO TRA I DUE METODI
86
4.5 Distribuzione delle sorgenti nel cielo
Risulta utile, prima di iniziare una ricerca di segnale gravitazionale, avere una stima
del numero di binarie che coalesceranno in tempi osservabili. Esistono due metodi
diversi per stabilirlo [11]: un’analisi statistica del campione osservativo dato dalle
binarie compatte conosciute, oppure un’indagine teorica basata sui meccanismi di
formazione di questi oggetti. Il primo approccio purtroppo è limitato dalle dimensioni ridotte del campione (al momento 3 sistemi), che risulta troppo dipendente
dagli effetti di selezione, oltre ad essere privo di sistemi di buchi neri e misti. Il
secondo procura risultati per ogni tipo di massa, ed è basato sui modelli di sintesi
di popolazione, generalmente calibrati per essere in accordo con le stime empiriche
dei flussi di supernovae di tipo II1 , che dipendono però dal tipo di modello scelto
per l’evoluzione del sistema.
Attualmente le stime dei flussi di coalescenze all’interno della Via Lattea sono:
10
5
%
10
3<
anno per i sistemi di stelle di neutroni, 10
misti, e 0 % 10
4<
6
%
10
4<
anno per quelli
anno per i buchi neri doppi.
Tutte le estrapolazioni a flussi extragalattici sono basate sull’assunzione che la
formazione di binarie compatte sia proporzionale alla luminosità nel blu di quella
regione, corretta dall’arrossamento dovuto alla distanza. Quindi il tasso di coalescenze alla distanza r risulta proporzionale a quello galattico ed al rapporto tra le
luminosità nel blu in quella sfera e nella Via Lattea:
ngal
lb 4 3
πr nV L
LbV L 3
(4.13)
dove lb è la densità media di luminosità nel blu entro r.
Nutzman, Kalogera, Finn, Hendrickson e Belczynski [11] hanno raffinato questo metodo, osservando tre cose:
1. Riscalare la luminosità è un procedimernto corretto se il volume considerato
è così ampio da rendere trascurabili le fluttuazioni locali nella densità di
1 Le
supernovae si suddividono in due categorie: quelle di tipo I sono le esplosioni di una singola
stella massiccia giunta al culmine della propria esistenza, mentre quelle di tipo II derivano dalla forte
quantità di energia liberata quando le due componenti di un sistema binario entrano in collisione tra
loro.
CAPITOLO 4. CONFRONTO TRA I DUE METODI
87
galassie, e questo non è valido nell’Universo locale, dove la distribuzione
di galassie è fortemente anisotropa. Per superare questa difficoltà hanno
usato dei cataloghi di galassie in modo da mappare la reale distribuzione
nello spazio che interessa le osservazioni (la massima distanza osservabile
dai rivelatori).
2. Le sensibilità dei rivelatori interferometrici non sono isotrope, ma essi riusultano più sensibili alle binarie immediatamente al di sopra o al di sotto del
piano determinato dai bracci, rispetto alle sorgenti presenti nel piano stesso.
3. La massima distanza osservabile dipende dalle masse delle stelle, per cui è
necessario calcolare il flusso al variare di queste.
Per tenere conto della distribuzione locale delle galassie sono stati utilizzati due
cataloghi, il Lyon-Meudon Extragalactic database (LEDA) e il Trully Nearby Galaxy Catalog (NBG) scelti per la loro mappatura pressochè omogenea del cielo. Il
catalogo nato dalla loro fusione risulta completo per galassie con magnitudine nel
blu inferiore a 14,52 , e per compensare questa perdita viene introdotto un fattore
di correzione dipendente dalla distanza.
Confrontando la lumonosità nel blu in funzione della distanza con quella ottenuta nell’ipotesi di isotropia, è possibile notare che il metodo “classico” sottostima il contributo delle galassie vicine, e che in prossimità dei 20 Mpc l’ammasso
della Vergine dà un consistente contributo. Inoltre al di là dei 20 Mpc la lumonisità cresce più lentamente di r 3 , e tende ad isotropizzarsi sempre di più a grandi
distanze.
2 La magnitudine è un’unità di misura della luminosità storicamente nata per rappresentare la
sensibilità dell’occhio umano che è approssimativamente logaritmica, e convenzionalmente ha una
scala negativa: mν DQ 2 G 5 ln Lν S cost
CAPITOLO 4. CONFRONTO TRA I DUE METODI
88
Per determinare una popolazione realistica di ciascuna galassia in base alla
massa di chirp gli stessi autori hanno elaborato un programma di sintesi per le
binarie BKB [2]. L’estrapolazione del tasso di coalescenze extragalattico viene
effettuata riscalando quello della Via Lattea con la luminosità nel blu del nuovo
oggetto in unità galattiche:
ngal
Lb gal
nV L
LbV L
(4.14)
Il passo successivo è la comprensione di come la distribuzione di binarie in coalescenza si rifletta nel numero di eventi osservabili, occorre considerare l’efficienza
di rivelazione, definita come la frazione di sistemi di una data popolazione che hanno la possibilità di essere rivelati con un rapporto segnale-rumore al di sopra di una
certa soglia. Assumendo una distribuzione uniforme di galassie la sensibilità di
un rivelatore è il volume dello spazio che riesce ad abbracciare, espresso convenzionalmente dal suo raggio efficace, ma tenendo conto della distribuzione reale di
galassie, e della diversa popolazione di binarie in ciascuna di esse, occorre trovare
una nuova definizione. Il numero di galassie rivelabili è:
NG
L
ndet
nV L
Li
∑ LV L εi
(4.15)
i
dove εi è l’efficienza del rivelatore per la galassia i-esima, ed L i la corrispondente
luminosità nel blu. Con questa definizione, il flusso di eventi osservabili è dato da:
ndet
NG nV L
(4.16)
CAPITOLO 4. CONFRONTO TRA I DUE METODI
89
e il numero di binarie nella Via Lattea può essere calcolato a partire dai campioni
osservativi e dai modelli di sintesi di popolazione.
4.5.1 Parametri che influenzano l’efficienza di un rivelatore
I rivelatori interferometrici sono più sensibili ad onde gravitazionali con una polarizzazione incidente normale al piano dei bracci. A causa della rotazione terrestre
la posizione e la polarizzazione delle sorgenti cambia nel tempo, e poiché le galassie non sono uniformemente distribuite, il tasso di binarie rivelabili stimato è una
funzione periodica del giorno siderale 3 . La variazione dettagliata dipende dalla
geografia galattica, dalla distribuzione di binarie con data massa di chirp, e dalla
soglia scelta per il rapporto segnale-rumore. Un esempio elaborato dali autori è
quello in figura, che mostra l’efficienza di LIGO con una soglia pari ad 8.
Il tempo è misurato in ore ed è dato dal tempo universale sommato al tempo
siderale di Greenwich all’ora 0 del tempo universale. L’ammasso della Vergine
è “visibile” dal rivelatore per circa due ore, pressochè coincidenti con il picco
maggiore in figura.
3 Il
giorno siderale viene definito come l’intervallo di tempo che intercorre tra due culminazioni
successive di una stella sul meridiano locale, e vale circa 23 ore e 56 minuti.
Il giorno solare è definito invece come l’intervallo tra due passaggi consecutivi del Sole sul meridiano locale, e rispetto al giorno siderale è più lungo di circa 4 minuti, perchè tiene conto della
rivoluzione della terra attorno al Sole.
Il tempo universale è quello misurato dali orologi atomici, al momento gli strumenti più precisi,
anche se i segnali delle pulsar riescono a raggiungere precisioni simili.
CAPITOLO 4. CONFRONTO TRA I DUE METODI
90
E’ interessante notare la dipendenza della risposta dello strumento dalla posizione della sorgente. Una volta mediato sul tempo siderale, il flusso di sorgenti
rivelabili dipende dalla posizione nel cielo soltanto tramite la declinazione.
In particolare, la sensibilità alle coalescenze nell’ammmasso della Vergine è
migliore per rivelatori posti a latitudini corrispondenti a declinazioni vicine all’ammasso, per cui Virgo e l’interferometro di LIGO presente a Livingston sono
favoriti nelle misure rispetto al LIGO di Hanford o a GEO. Se ad esempio gli altri
due rivelatori di LIGO fossero stati costruiti a latitudini più vicine a quelle declinazioni, la rete dei tre avrebbe il 25% in più di probabilità di rivelare coalescenze
dall’ammasso della Vergine.
L’efficienza massima di un rivelatore si ha per galassie situate ai poli celesti,
a differenza di quanto ci si potrebbe aspettare, infatti, le sorgenti maggiormente
rivelabili non sono quelle allo zenit dello strumento. Questo perché le galassie
alle declinazioni corrispondente alla latitudine del rivelatore sono allo zenit per
una breve frazione di tempo, mentre l’efficienza delle galassie ai poli celesti è
indipendente dal tempo, in quanto sono visibili durante tutto il giorno.
I precedenti studi adottavano per l’efficienza di rivelazione in funzione della
distanza un gradino, questa valeva 1 fino ad una certa distanza, oltre la quale scendeva bruscamente a zero, per LIGO, ad esempio, era stimato un limite superiore a
20 Mpc per le stelle di neutroni, 40 Mpc per i sistemi misti, e di 100 Mpc per i buchi neri. Considerando invece che galassie ad una data distanza hanno una diversa
CAPITOLO 4. CONFRONTO TRA I DUE METODI
91
probabilità di essere rivelati a seconda della loro declinazione, la curva che hanno
ottenuto gli autori molto diversa, come è mostrato nel grafico:
L’efficienza ha una coda diversa da zero che si estende a distanze molto maggiori, per i buchi neri ad esempio fino a 130 Mpc è superiore al 10%. D’altro canto,
per lo stesso motivo non è mai il 100%, ma realisticamente minore (per l’ammasso
della Vergine l’efficienza stimata in questo modo è del 60%).
Le efficienze delle tre sottopopolazioni di sistemi binari sono diverse tra loro a
causa delle diverse distribuzioni della massa di chirp. La distribuzione di binarie
rivelabili in funzione della massa di chirp è dominata dai sistemi di buchi neri, in
quanto il segnale gravitazionale è più potente, comunque il contributo dato dalle
stelle doppie di neutroni risulta il doppio rispetto a quello nell’ipotesi di isotropia
locale, che sottostima il numero di galassie presenti nel vicino Universo. Questa
sottostima risulta maggiore alle distanze dell’ammasso della Vergine, rispetto che
a distanze maggiori, dove sono rivelabili soltanto buchi neri, e quindi penalizza
prevalentemente i sistemi meno massicci.
Gli autori hanno stimato per l’esperimento di LIGO un tasso di rivelazione
compreso tra i 2 10
2
ed i 3 10
1
eventi l’anno per i sistemi di stelle di neutroni.
Gli unici fattori che non sono stati tenuti in considerazione in questa correzione
sono la metallicità delle galassie, che influenza i venti stellari e le masse finali
degli oggetti compatti, e la storia della formazione stellare per ciascuna di esse,
informazioni ancora parzialmente note.
CAPITOLO 4. CONFRONTO TRA I DUE METODI
92
4.6 Il futuro prossimo: Virgo e LIGO advanced
Una distribuzione non isotropa delle sorgenti osservabili, sebbene sia più ottimistica nella previsione del numero di sistemi di stelle di neutroni, comporta ulteriori complicazioni, come la forte dipendenza dalla declinazione, dall’ora del
giorno e dalla posizione degli interferometri della probabilità di rivelazione, e la
constatazione che di fatto essa non si mai il 100%.
Per riuscire a raggiungere masse e distanze sempre maggiori, alcuni anni dopo
l’avvio degli esperimenti, i rivelatori saranno potenziati, in modo da aumentarne
significativamente la sensibilità. Il progetto per il raffinamento di Virgo, detto “Virgo advanced”, è attualmente in corso di definizione, e prevede alcuni accorgimenti
per la riduzione dei vari tipi di rumore.
Il rumore termico presente nelle sospensioni può essere ridotto utilizzando per
costruirle un materiale a bassa dissipazione, come fibre di silicio fuso, che attualmente sono la soluzione migliore. Queste permetterebbero di avere un fattore di
qualità Q k 109 che significherebbe ridurre di un fattore 30 l’ampiezza dello spettro
di rumore.
Il silicio sembra la soluzione più adatta anche per raffreddare gli specchi stessi,
ricoprendoli con uno strato sottile. Inoltre per evitare di avere troppi oggetti a
carico delle sospensioni, sono in progetto attuatori elettrostatici al posto di quelli
magnetici.
Per diminuire lo shot noise la potenza del laser varrà aumentata a 300W, e
questo ridurrà il rumore a basse frequenze di un fattore 30.
Un’altra possibilità allo studio è l’utilizzo del cosiddetto “ricircolo di segnale”,
una tecnica che consente di far diventare il rivelatore risonante e quindi di migliorare la sensibilità in una porzione della banda di frequenza, a scapito della sensibilità
nel resto della banda.
La combinazione di queste migliorie dovrebbe far sì che la sensibilità del rivelatore aumenti di circa un ordine di grandezza rispetto a quella attuale; ad esempio, se non si utilizza il ricircolo di segnale, si dovrebbe guadagnare un fattore
6,4 in distanza. Sono infatti state effettuate simulazioni nelle stesse ipotesi e condizioni utilizzate precedentemente, immettendo nel programma questa ipotesi di
miglioramento della sensibilità, ed i risultati sono mostrati in figura:
CAPITOLO 4. CONFRONTO TRA I DUE METODI
93
Virgo advanced
1
0,9
1,4-1,4 masse solari
1,4-2,4 masse solari
1,4-10 masse solari
5-5 masse solari
15-15 masse solari
Probabilita media di rivelazione
0,8
0,7
0,6
0,5
0,4
0,3
0,2
0,1
0
0
100
200
300
400
500 600 700
Distanza (Mpc)
800
900
1000 1100 1200
Anche i rivelatori dell’esperimento parallelo LIGO saranno raffinati raggiungendo sensibilità di circa un ordine di grandezza maggiori di quelle attuali, e questo
consentirà di poter misurare con una rete estremamente potenziata. I grafici seguenti mostrano la probabilità media di rivelazione in funzione della distanza per
la rete completa dei rivelatori avanzati, per i differenti valori di masse delle stelle.
Rete Virgo adv-LIGO adv
1,4-1,4 masse solari (stelle di neutroni)
1
0,9
Coincidente 2/4
Coerente
Coincidente 3/4
Probabilita media di rivelazione
0,8
0,7
0,6
0,5
0,4
0,3
0,2
0,1
0
0
50
100
150
200
300
250
Distanza (Mpc)
350
400
450
500
CAPITOLO 4. CONFRONTO TRA I DUE METODI
94
Rete Virgo adv-LIGO adv
sistemi misti
1
0,9
Coincidente 2/4 1,4-2,4 masse solari
Coerente 1,4-2,4 masse solari
Coincidente 2/4 1,4-10 masse solari
Coerente 1,4-10 masse solari
Coincidente 3/4 1,4-2,4 masse solari
Coincidente 3/4 1,4-10 masse solari
Probabilita media di rivelazione
0,8
0,7
0,6
0,5
0,4
0,3
0,2
0,1
0
0
100
200
300
400
500
600
Distanza (Mpc)
700
800
900
1000
Rete Virgo adv-LIGO adv
sistemi di buchi neri
1
0,9
Coincidente 2/4 5-5 masse solari
Coerente 5-5 masse solari
Coincidente 2/4 15-15 masse solari
Coerente 15-15 masse solari
Coincidente 3/4 15-15 masse solari
Coincidente 3/4 5-5 masse solari
Coincidente 3/4 15-15 masse solari
Probabilita media di rivelazione
0,8
0,7
0,6
0,5
0,4
0,3
0,2
0,1
0
0
500
1000
1500
2000
3000
2500
Distanza (Mpc)
3500
4000
4500
5000
Come è facilmente osservabile, si ha un notevole allargamento dell’orizzonte,
di circa un fattore 15, e questo permette, nei casi di oggetti molto massicci, di
rivelare sistemi fino a distanze cosmologiche. La rete di interferometri potenziati
quindi potrebbe essere utilizzata, una volta rivelati i segnali, anche come base per
la determinazione della costante di Hubble con ulteriore precisione.
CAPITOLO 4. CONFRONTO TRA I DUE METODI
95
4.7 Accuratezza nella determinazione dei parametri
Una volta certi di aver rivelato un segnale gravitazionale proveniente da un sistema binario, oltre a confermare ulteriormente l’accuratezza della teoria della Relatività Generale, si apre una nuova branca dell’astrofisica, che permette di ricavare notevoli informazioni sulle sorgenti, come sottolineato in precedenza spesso
complementari a quelle elettromagnetiche.
Culter e Flanagan hanno compiuto uno studio sull’accuratezza nella determinazione dei parametri che caratterizzano una sorgente, supponendo di misurare con
una rete di interferometri [7].
Il rumore intrinseco dei rivelatori è previsto essere la principale causa delle
incertezze sulla determinazione dei parametri stellari, ma esistono altre fonti di
errori, quali la non perfetta conoscenza di un modello teorico di forma d’onda, e
l’amplificazione o la deamplificazione dell’ampiezza del segnale a causa delle lenti
gravitazionali.
E’ necessario osservare che i parametri ottenibili dalla fase dell’onda avranno
un’accuratezza maggiore rispetto a quelli che si ricavano dall’ampiezza, infatti il
numero di cicli che si osservano nella permanenza del segnale nella banda del
rivelatore ne aumenta notevolmente la sensibilità.
4.7.1 Parametri derivanti dalla fase: le masse
Le masse delle due stelle influenzano sia l’ampiezza che la fase del segnale, è però
conveniente ricavarle da quest’ultima , visto che l’accuratezza risulta proporzionale
al numero di cicli d’onda contenuti nei dati.
Assumendo che un interferometro riveli in media nella banda 10-500 Hz, un’onda compirà circa 103 cicli nel tempo di integrazione (durata della misura), e l’accuratezza nella determinazione delle masse aumenterà di un fattore pari al numero di cicli, ovvero di tre ordini di grandezza rispetto ai parametri ricavabili
dall’ampiezza.
Il segnale newtoniano consente di ricavare unicamente una combinazione dei
due parametri, la massa di chirp (definita di seguito alla 1.25), è quindi necessario
ricorrere agli ordini successivi. Tuttavia è possibile ottenere un limite superiore
alla massa minore m2 , ed uno inferiore a quella maggiore m 1 , anche conoscendo
CAPITOLO 4. CONFRONTO TRA I DUE METODI
96
solamente la massa di chirp, mediante la seguente osservazione: quando le due
masse sono uguali, m1 raggiunge il suo minimo, mentre la compagna il massimo,
1
5
in questa circostanza la massa di chirp vale m 1 2
1
mentre m2
2
, per cui si ha che m1
1
-
2 5 Mc ,
2 5 Mc .
L’errore nella determinazione della massa di chirp è dato dall’espressione:
∆ ln Mc
5
1 2 10
10
SNR
Mc
M#
5
3
(4.17)
dove SNR è il rapporto segnale-rumore, che per una rete di rivelatori è definito:
∑a SNR2a
Gli ordini post-newtoniani presentano un’ulteriore complicazione: la forma
SNRrete
L
M
d’onda dipende anche dalla rotazione delle stelle attorno al proprio asse, e questo
ha l’effetto di raddoppiare circa l’errore nella determinazione della massa ridotta
del sistema, infatti i due parametri sono fortemente correlati, e non è sempre possibile distinguerne i risultati all’interno del segnale misurato. All’ordine 1,5 postnewtoniano, e considerando solamente le correzioni dovute all’interazione dell’onda con il potenziale gravitazionale del sistema, trascurando le conseguenze della
rotazione, l’incertezza sulla massa ridotta risulta circa l’1%, contro lo 0,01-0,1%
della massa di chirp. Questo è dovuto al fatto che ciascun termine post-newtoniano
è circa
M
a
volte minore del precedente, per cui, assumendo che
M
a
>
1
20
la misura
della massa ridotta è circa 20 volte più imprecisa della massa di chirp se misurata
al primo ordine, di circa 90 se all’ordine 1,5. Per determinare le singole masse
viene usata la relazione:
m1 5 2
5
1
Mc2 µ
2 .
3
2 K
Mc5 µ 3
5
2
4Mc µ
1
2
1
2
(4.18)
/
e le rispettive varianze risultano:
σ m1
σµ
b
M µ 3m1 2µ m1 m2 2
c
σ m2
σµ
b
M µ 3m2 2µ m1 m2 2
c
(4.19)
Per un sistema composto da un buco nero di circa 10 masse solari e da una
stella di neutroni di 1,4, ad esempio,
∆µ
µ
>
15% ed i rispettivi errori sulle masse
CAPITOLO 4. CONFRONTO TRA I DUE METODI
97
saranno del 30% sulla primaria, e del 20% sulla compagna.
Considerando anche il contributo della rotazione, l’errore sulla massa ridotta
aumenta di un fattore che varia da 20 a 60, però è possibile conoscere, con la stessa
accuratezza di µ nel caso precedente, la combinazione:
σµβ
β
σβ
µ
(4.20)
dove σµβ è la correlazione tra la massa ridotta e β, definito come:
β
L
L̂
M2
N
113
12
25 m2
4 m1
S1
113
12
25 m1
4 m2
S2 O con L̂ momento angolare di ri-
voluzione unitario, ed S1 S2 momenti angolari di rotazione delle stelle.
Nel caso di binarie a grandi distanze, alle quali l’arrossamento dovuto all’espansione dell’Universo non sia più trascurabile, non è possibile determinare separatamente l’effetto Doppler avendo a disposizione soltanto h t , e le due masse
saranno note a meno del redshift cosmologico z:
Mc
1
z Mc reale µ 1
z µreale
(4.21)
se però la stella di neutroni è una pulsar, ad esempio, è possibile calcolare z in
maniera indipedente dal segnale gravitazionale, e ricavare le masse con maggior
precisione.
Un espediente per ottenere risultati migiori è quello di usare una rete con il
numero massimo di rivelatori a disposizione N, in quanto l’errore sulle singole
masse si riduce di un fattore
X
N.
4.7.2 Parametri derivanti dall’ampiezza: la distanza
Per determinare la distanza di una sorgente, è necessario localizzarla nel cielo,
e conoscerne ampiezza e polarizzazione dell’onda emessa; la rete di rivelatori in
questo caso diviene indispensabile. Rispetto al caso precedente, comunque, l’approssimazione newtoniana è sufficiente, il che semplifica notevolmente i calcoli.
L’ampiezza dell’onda può essere misurata da ogni rivelatore con un’accuratezza pari a:
∆A
A
1
SNRa
(4.22)
CAPITOLO 4. CONFRONTO TRA I DUE METODI
e considerato che A ∝
trebbe essere
∆r
r
&
1
r
1
SNRrete
98
, una stima “artigianale” dell’errore sulla distanza podell’ordine del 10%. Tuttavia l’ampiezza del segnale è
fortemente influenzata dalla posizione della sorgente (δ α), dalla polarizzazione
dell’onda, e in maniera ancor più determinante dall’inclinazione dell’orbita del sistema rispetto al piano di vista, esisterà quindi una correlazione tra le stime per la
distanza e quelle per gli angoli, che tenderà a ridurne l’accuratezza.
Detta Θ la matrice di correlazione tra le funzioni d’antenna dei rivelatori (risposte degli strumenti ad un segnale a forma di delta di Dirac), che assume la
forma:
0
3
dove σr ed εr
6
0
1 εr
(4.23)
4
0 17 sono funzioni dei parametri angolari, l’errore sulla distanza
ha come limite inferiore:
con σmax
εr
1
Θ σr
∆r
r
-
X
2
r
σmax r0
(4.24)
max δ 5 α ! σr δ α che assume valori intorno ad 1, ed r 0 una distanza di
riferimento dipendente dalle caratteristiche dello strumento.
Culter e Flanagan hanno effettuato delle simulazioni Monte Carlo di misure di
distanza utilizzando la rete di interferometri conposta da Virgo e due dei tre LIGO,
ottenendo circa l’8% delle misure con un’accuratezza entro il 15%, ed il 60% circa
entro il 30%.
La correlazione tra le misure di distanza ed i parametri angolari ne diminuisce
l’accuratezza di un fattore 2-3 rispetto alla stima iniziale che teneva conto soltanto dell’ampiezza, mentre l’orientazione del rivelatore influisce pesantemente nella
determinazione dei parametri, a causa della sua sensitività polarizzata. Per questo
motivo è importante scegliere adeguatamente le posizioni degli interferometri sulla
superficie terrestre, in modo da ottenere il maggior numero di informazioni possibili riguardanti una sorgente. In particolare con un numero maggiore di rivelatori
l’errore sulla distanza sarà sensibilmente diminuito, e sarà possibile utilizzare le
binarie coalescenti come candele standard, e determinare con maggior precisione
anche la costante di Hubble.
CAPITOLO 4. CONFRONTO TRA I DUE METODI
99
4.8 Conclusioni
Dallo studio effettuato sui risultati ottenibili mediante una rete di interferometri
sono emersi alcuni risultati interessanti.
La prima considerazione riguarda il parallelo tra i due metodi di analisi, quello coerente e quello coincidente: le simulazioni nelle ipotesi di rumore gaussiano
hanno confermato la superiorità del primo in termini di probabilità di rivelazione,
tuttavia l’esito della ricerca coincidente è stato tutt’altro che negativo, esso infatti
permette di raggiungere distanze il 25% circa inferiori al metodo coerente. Considerando il fatto che in condizioni più realistiche il rumore non è completamente
gaussiano, e che la procedura coerente non è perfettamente in grado di filatrare
questi falsi allarmi, mentre il metodo coincidente si basa proprio su questo tipo di
filtraggio, sembra che la scelta migliore sia far operare i rivelatori in coincidenza.
Ciascun interferometro quindi compilerebbe la sua lista di eventi, dopodiché queste
liste verrebbero confrontate in cerca di coincidenze, appunto, eventi che compatibilmente potrebbero provenire dalla stessa sorgente. Gli eventi che non riscontrerebbero almeno una controparte nella rete verrebbero scartati come falsi allarmi, i
rimanenti sarebbero con grande probabilità candidati a segnali gravitazionali veri
e propri.
Risulta utile osservare come la probabilità di rivelazione per entrambe le strategie di analisi prese in considerazione aumenti all’aumentare dei rivelatori coinvolti
nella misura. I risultati ottenibili con la minirete composta dai tre LIGO migliorano
sensibilmente di circa il 12% se si aggiunge anche Virgo, sarebbe utile quindi avere
a disposizione un numero maggiore di rivelatori, in posizioni diverse sulla superficie terrestre, in modo da poter coprire una porzione di cielo più ampia possibile, e
allo stesso tempo aumentare la probabilità di rivelare segnali gravitazionali. E’ importante però che le sensibilità degli strumenti non risultino troppo disomogenee,
ma tali che i pesi relativi degli elementi siano confrontabili, e ciascuno di essi sia
realmente utile alla ricerca.
E’ necessario ricordare inoltre che le stime sono state effettuate ipotizzando
una distribuzione uniforme delle sorgenti nel cielo, mentre su scale delle decinecentinaia di megaparsec questo non è vero, in quanto la presenza di ammassi è
determinante. La ricerca dunque è più complessa, in quanto la sensibilità dei ri-
CAPITOLO 4. CONFRONTO TRA I DUE METODI
100
velatori, e quindi la probabilità di rivelazione dipende sia dalla posizione della
sorgente nel cielo, che dall’ora del giorno, di conseguenza in condizioni favorevoli la probabilità aumenterà, in altre risulterà estremamente più difficile rivelare un
ipotetico segnale.
A questo problema potrebbe essere utile una mappatura dettagliata del cielo
a determinate distanze, con modelli di formazione delle binarie in modo da poter
calcolare in media il numero di sorgenti che ci si attende. Al tempo stesso, il
potenziamento degli interferometri che è in progetto, contribuirebbe a migliorare
la situazione, in quanto allargherebbe l’orizzonte osservabile di un fattore 15, tale
da poter rivelare, in determinati casi, anche sino a distanze cosmologiche.
Ringraziamenti
Prima di tutto vorrei ringraziare il mio relatore, una persona veramente disponibile
e gentile con cui ho lavorato benissimo, grazie anche alla sua capacità di mettermi a
mio agio sin dall’inizio della tesi. Mi piacerebbe anche ringraziare tutte le persone
che lavorano a Virgo con cui ho avuto modo di entrare in contatto durante il lavoro
e che hanno contribuito a renderlo un’esperienza positiva, tra i quali Leone Bosi e
Giovanni Losurdo.
Un ringraziamento speciale va ai miei genitori e a mio fratello, che mi hanno
pazientemente sopportata in questo periodo di stesura durante il quale sono stata
intrattabile, ma soprattutto per aver sempre avuto fiducia in me in tutti questi anni.
Grazie a Filippo, carissimo amico dai primi anni di corsi, su cui ho sempre
potuto contare nei momenti di difficoltà, sempre pronto a darmi una mano, un
consiglio, o semplicemente ad ascoltarmi quando ne avevo bisogno, per avermi
sopportata anche quando ero intrattabile...grazie davvero di cuore!
Un grazie speciale a Giulia, con cui sono praticamente cresciuta insieme, compagna di infiniti pomeriggi e sere a parlare e buona amica che mi ha sempre
sostenuta ed aiutata quando è servito.
Un grazie di cuore a Carlo, il mio compagno di laboratorio 4 preferito, che si
è rivelato un caro amico e “faretto” sempre acceso con consigli o incoraggiamenti
quando ne avevo bisogno.
Grazissimissime a Manuela, cara stellina e amica fedele che col suo sorriso
o con una parola al momento giusto ha rallegrato mille giornate di lezione e di
laboratorio, che senza di lei sarebbero state più grigie...
Grazie anche a Alessandro, il mio compagno di allenamenti da sempre, per
101
CAPITOLO 4. CONFRONTO TRA I DUE METODI
102
avermi ascoltata specialmente in questi ultimi mesi di lunghe corse durante le quali
ci raccontavamo le nostre vicessitudini universitarie...
Infine un grazie a Paola, amica che ho scoperto così cara soltanto recentemente,
a France, a Antonella, a Diego, a Giorgio, a Luca, a Simone, a Stefano, a Giulia....
Bibliografia
[1] Astone P., Babusci D., Baggio L., Bassan M., Blair D. G., Bonaldi M., Bonifazi P., Busby D., Carelli P., Cerdonio M., Coccia E., Conti L., Cosmelli C.,
D’Antonio S., Fafone V., Falferi P., Fortini P., Frasca S., Giordano G., Hamilton W. O., Heng I. S., Ivanov E. N., Johnson W. W., Marini A., Mauceli E.,
McHugh M. P., Mezzena R., Minenkov Y., Modena I., Modestino G., Moleti
A., Ortolan A., Pallottino G. V., Pizzella G., Prodi G. A., Quintieri L., Rocchi A., Rocco E., Ronga F., Salemi F., Santostasi G., Taffarello L., Terenzi
R., Tobar M. E., Torrioli G., Vedovato G., Vinante A., Visco M., Vitale S.,
Zendri J. P., “Methods and result of the IGEC search for burst gravitational
waves in the years 1997-2000”, Phys. Rev. D 68, 02201 (2003).
[2] Belczynski K., Kalogera V., Bulik T., “A comprehensive study of binary compact objects as gravitational wave sources: evolutionary channel, rates, and
physical properties”, Astrophys. J. 572 (2001) 407-431.
[3] Benacquista M. J., “Relativistic Binaries in Globular Clusters”, Living Rev.
Rel. 5 (2002) 2, http://relativity.livingreviews.org/lrr-2002-2 (2002).
[4] Blanchet L., “Energy loss by gravitational radiation in inspiraling compact
binaries to 5/2 post-Newtonian order”, Phys. Rev. D 54, 1417 (1996).
[5] Blanchet L., “Gravitational Radiation from Post-Newtonian Sources
and Inspiralling Compact Binaries”, Living Rev. Rel. 5 (2002) 3,
www.livingreviews.org/Articles/Volume5/2002-3blanchet (2002).
[6] Castellani V., “Astrofisica stellare - I fondamenti fisici dell’interpretazione
evolutiva di stelle e galassie”, Ed. Zanichelli, Bologna (1985).
103
BIBLIOGRAFIA
104
[7] Culter C., Flanagan E. E., “Gravitational waves from merging compact binaries: How accurately can one extract the binary’s parameters from the inspiral
waveform?”, Phys. Rev. D 49 2658 (1993).
[8] Fabri E., “Argomenti di Cosmologia e Astrofisica Relativistica”, Anno
Accademico 2001-02, ftp://osiris.df.unipi.it/pub/sagredo/afrel
[9] Hurley J. R., Tout C. A., Pols O. R., “Evolution of Binary Stars and the Effects
of Tides on Binary Populations”, Mon. Not. R. Astron. Soc. 000, 1-36 (2000).
[10] Losurdo G., “Ultra Low Frequency Inverted Pendulum for the VIRGO Test Mass Suspension”, Tesi di Perfezionamento in Fisica, Scuola Normale
Superiore di Pisa (1998).
[11] Nutzman P., Kalogera V., Finn L. S., Hendrickson C., Belczynski K., “Gravitational Waves from Extragalactic Inspiraling Binaries: Selection Effects and
Expected Detection Rates”, astro-ph/0402091 v2 (2004).
[12] Owen B. J., Sathyaprakash B. S., “Matched filtering of gravitational waves from inspiraling compact binaries: Computational cost and template
placement”, Phys. Rev. D 60, 022002 (1999).
[13] Owen B. J., “Search templates for gravitational waves from inspiraling
binaries: Choice of template spacing”, Phys. Rev. D 53, 6749-6761 (1996).
[14] Pai A., Dhurandhar S., Bose S., “A data analysis strategy for detecting
gravitational-wave signals from inspiraling compact binaries with a network
of laser-interferometric detectors”, Phys. Rev. D 64, 042004 (2001).
[15] Paolicchi
P.,
“Lezioni
di
Astrofisica
I”,
Astrofisica
II”,
http://www.df.unipi.it/ > paolic/dispense.html .
[16] Paolicchi
P.,
“Lezioni
di
http://www.df.unipi.it/ > paolic/dispense.html .
[17] Saulson P. R., “Fundamentals of interferometric gravitational wave
detectors”, World Scientific Publishing Co., Singapore (1994)
BIBLIOGRAFIA
105
[18] Sensibilità di LIGO advanced: Comunicazione privata di Peter Fritschel
[19] Sensibilità di Virgo advanced: M. Punturo “Possible scenarios of Advanced
Virgo sensitivity” nota di Virgo (2004).
[20] Viceré A., “Network analysis for coalescing binaries: coherent versus
coincidence based strategies”, Class. Quantum Grav. 21 (2004)
[21] Viceré A., “Introduction to data analysis in interferometric gravitational wave
experiments”, World Scientific (2000)
[22] Viceré A., “Virgo-SIGRAV school: Data Analysis for Coalescing Binaries”
(2003)
[23] www.tapir.caltech.edu/ > huges/ASIS/sourcelist.html
[24] www.virgo.infn.it/senscurve/VIR-NOT-PER-1390-51.pdf