A1.5 Dinamica dei corpi rigidi rotanti
Meccanica, Macchine ed Energia – articolazione Meccanica e Meccatronica 3 – Giuseppe Anzalone, Paolo Bassignana, Giuseppe Brafa Musicoro • Copyright © Ulrico Hoepli Editore S.p.A.
Il concetto di equilibratura
Durante il funzionamento, molti organi meccanici ruotano intorno a un asse, come per esempio gli assi e gli alberi, le ruote dei veicoli, le ruote dentate, le pulegge, i volani, le camme e gli organi di comando, nonché i cuscinetti, i dischi e i tamburi dei freni, i giunti di accoppiamento, i mandrini delle
macchine utensili, i motori, i giranti delle pompe, le turbine e i compressori.
In genere questi organi vengono schematizzati in forma di cilindri, ponendo in evidenza l’asse di rotazione (di regola coincidente con l’asse del cilindro stesso), e sono detti corpi rotanti a forte velocità (4Fig. 1.17).
Fig. 1.17
Corpo rotante a forte velocità.
poliglotta
Equilibratura
GB: Balancing
F: Équilibrage
D: Auswuchten
poliglotta
Massa rotante
GB: Rotating mass
F: Masse roulante
D: Drehende Masse
Tutti i corpi rotanti a forte velocità richiedono studi specifici e rilievi
sperimentali, riguardanti la geometria delle masse e le sollecitazioni
che nascono al loro interno e sui supporti, in seguito all’alta frequenza
di rotazione raggiunta; tali sollecitazioni possono danneggiare il corpo
in modo irreparabile. Le attività di progettazione e di misura costituiscono la teoria dell’equilibratura.
Si definisce equilibratura l’insieme delle analisi di natura dinamica,
vibrazionale ed elastica, e dei processi volti a migliorare la distribuzione
delle masse dei corpi rotanti a forte velocità.
Lo scopo dell’equilibratura è di valutare il valore delle forze centrifughe
squilibrate, determinando le modifiche alla geometria del corpo necessarie a ridurre tale stato di squilibrio e, in particolare, l’entità delle reazioni
vincolari. Gli organi rotanti a basse velocità non necessitano di tale tipo di
analisi, in quanto i carichi dovuti alla rotazione risultano di bassa entità.
Non essendo ovviamente possibile raggiungere l’equilibratura completa di un pezzo, occorre definire obiettivi giudicati accettabili, in funzione del tipo di corpo rotante e delle sue applicazioni: in ogni corpo sarà sempre presente uno squilibrio residuo.
Analisi della condizione di equilibratura dei corpi rotanti
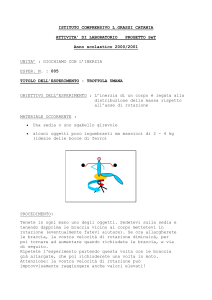
Nella figura 1.18 è schematizzato un corpo di forma generica, privo di
simmetrie, che ruota con velocità angolare ω costante, intorno a un asse z
1
ALberi e assi
A1
Meccanica, Macchine ed Energia – articolazione Meccanica e Meccatronica 3 – Giuseppe Anzalone, Paolo Bassignana, Giuseppe Brafa Musicoro • Copyright © Ulrico Hoepli Editore S.p.A.
qualunque interno al corpo. Per ragioni di semplicità si considera la massa m omogenea.
Fig. 1.18
Corpo di forma generica
in rotazione, con in evidenza
le tre masse elementari e le rispettive
forze centrifughe infinitesime:
i due supporti sostengono il peso
e le reazioni alle sollecitazioni
conseguenti alla rotazione.
richiamo
Le forze centrifughe dei corpi rotanti
sono presentate nella C1 del
Volume 1.
Si consideri ora il corpo rotante in questione suddiviso in un numero
teoricamente infinito di masse elementari dmi, piccole a piacere, di forma generica e aventi ciascuna una distanza ri dall’asse z di rotazione.
Nella figura 1.18 sono inoltre indicati il baricentro G del corpo e due
masse elementari dm1 e dm2, poste alle rispettive distanze r1 e r2 dall’asse di rotazione k; su ciascuna massa elementare è riportata la forza cen­
trifuga Fcf , la cui formulazione è espressa nel modo seguente:
la forza centrifuga di una massa m, che ruota di moto circolare uniforme con velocità ω a una distanza r dall’asse di rotazione, è espressa
dalla seguente relazione:
Fcf = m ω 2 r
[1.58]
Per ogni corpo sottoposto a rotazione intorno a un asse vale la seguente
proprietà:
poliglotta
Campo centrifugo
GB: Centrifugal field
F: Champ centrifuge
D: Zentrifugalfeld
richiamo
Il pedice i attribuito a una massa
elementare indica che la massa
è posta in una generica posizione
internamente al corpo.
tutti i punti appartenenti a un corpo rotante sono sottoposti a un campo
di natura centrifuga.
Pertanto, applicando a ogni punto materiale appartenente al corpo la
formula della forza centrifuga, considerando che nell’intorno del singolo punto è compresa una generica massa elementare dmi, si ottiene la
forza centrifuga infinitesima dFcf,i agente sulla suddetta massa elementare i-esima:
dFcf,i = ω 2 r dmi
Esempio
Una massa m = 2,5 kg ruota intorno a un asse fisso con raggio rg = 30 cm
e con velocità di rotazione ω = 40 rad/s. Calcolare la forza centrifuga.
Soluzione
Applicando la [1.58] si ottiene:
Fcf = m ω 2 r = 2,5 × 402 × 0,3 = 1200 N
2
ALberi e assi
A1
Meccanica, Macchine ed Energia – articolazione Meccanica e Meccatronica 3 – Giuseppe Anzalone, Paolo Bassignana, Giuseppe Brafa Musicoro • Copyright © Ulrico Hoepli Editore S.p.A.
La figura 1.19a rappresenta la sezione eseguita sul corpo con un piano
perpendicolare all’asse z e contenente il baricentro G, detto piano del­
lo squilibrio statico; il punto C è la traccia dell’asse di rotazione sul
piano di sezione.
Fig. 1.19
Forza centrifuga risultante applicata
nel baricentro del corpo rotante:
a) rappresentazione nel piano
dello squilibrio statico,
perpendicolare all’asse z;
b) forza centrifuga risultante
e momento di riequilibrio risultante.
richiamo
I principi teorici e i metodi di calcolo
dei baricentri dei sistemi di masse
sono presenti nella A5 del Volume 1.
Nel baricentro è applicata la forza centrifuga Fcf di tutto il corpo,
orientata radialmente sul prolungamento del segmento GC. Tale segmento rappresenta anche il raggio rg di rotazione del baricentro, durante la rotazione del corpo, con velocità angolare ω; il baricentro percorre
una traiettoria circolare di raggio rg intorno al centro di rotazione C e
possiede una velocità periferica costante in modulo, espressa dalla seguente relazione:
vg = ω rg
[1.59]
La distanza fra il baricentro e la traccia dell’asse di rotazione corrispondente al raggio di rotazione rg è definita squilibrio specifico.
È possibile formulare le seguenti osservazioni dedotte dalle proprietà
congiunte dei baricentri e delle forze centrifughe.
— Ricordando che il baricentro di un corpo è definito come centro del
sistema di forze parallele, costituito dalle forze peso elementari,
ne consegue che questa proprietà può essere estesa a un sistema di
forze parallele, costituito dalle forze centrifughe elementari che nascono in ogni massa elementare del corpo, quando esso ruota intorno
a un suo generico asse; infatti, la forza peso e la forza centrifuga sono entrambe linearmente proporzionali alla massa.
— Essendo il baricentro il punto di applicazione della forza peso, esso
rappresenta il punto di applicazione della forza centrifuga risultante.
— La forza centrifuga risultante è un vettore rotante, costante nel modulo, la cui direzione incide sull’asse di rotazione ed è perpendicolare a esso, e con il punto di applicazione coincidente con il baricentro
G del corpo.
3
ALberi e assi
A1
Meccanica, Macchine ed Energia – articolazione Meccanica e Meccatronica 3 – Giuseppe Anzalone, Paolo Bassignana, Giuseppe Brafa Musicoro • Copyright © Ulrico Hoepli Editore S.p.A.
— La traiettoria del punto G di applicazione della forza centrifuga risultante è una circonferenza di raggio rg.
— Maggiore è la distanza rg del baricentro dall’asse di rotazione, maggiore risulta l’entità della forza centrifuga in esso applicata.
Riduzione del sistema di forze centrifughe elementari
al baricentro
richiamo
La teoria della riduzione
di un sistema di forze a un punto
è presentata nella A3 del Volume 1,
invece la teoria del trasporto di una
forza parallelamente a se stessa
è riportata nella A2 del Volume 1.
L’analisi dell’insieme delle reazioni vincolari e dello stato di sollecitazione, generati dall’insieme delle infinite forze centrifughe elementari
dFcf , può essere condotto a una rapida soluzione ricorrendo alla teoria
della riduzione di un sistema di forze rispetto a un punto, avendo
assunto proprio il baricentro G come centro di riduzione.
Questa procedura consente di ridurre tutto il sistema a due sole
grandezze, la risultante Fcf del sistema di forze, applicata nel baricentro, e il momento risultante Mcf delle stesse forze, calcolato rispetto al
baricentro e giacente in un piano meridiano, il cui orientamento rispetto al baricentro è a priori sconosciuto (4Fig. 1.19b).
Osservazione: la forza centrifuga risultante è ottenuta traslando, parallelamente a se stesse, tutte le forze elementari dal loro punto di applicazione al baricentro, quindi eseguendo la somma vettoriale. Ogni volta
che si trasla una forza parallelamente a se stessa, dovendo mantenere
invariati gli effetti complessivi sul corpo, occorre introdurre anche un
momento di riequilibrio, o coppia di trasporto, pari al prodotto della forza per la distanza fra il punto di applicazione iniziale e il punto
finale (distanza di trasporto); la somma vettoriale di tutti i momenti
di riequilibrio crea il momento risultante Mcf ; non sempre il piano su
cui giace il momento Mcf deve contenere il baricentro e, se ciò avviene, è
puramente casuale.
Il campo centrifugo così ridotto si presenta di facile soluzione, in quanto è costituito da due grandezze dinamiche, ossia da una sola forza
risultante e un solo momento risultante. Le reazioni vincolari nei
vincoli A e B devono equilibrare sia il peso sia la forza centrifuga risultante Fcf e il momento risultante Mcf .
Si consideri per semplicità un corpo generico rotante intorno a un
asse verticale: anche il peso si scarica in direzione verticale e le reazioni vincolari che consentono il sostegno del corpo risultano puramente
assiali; tale scelta rende più agevole l’individuazione delle reazioni vincolari dovute ai soli carichi di natura centrifuga, rappresentate separatamente nella figura 1.19. Di seguito si evidenziano le reazioni vincolari,
in funzione dei carichi esterni Fcf e Mcf applicati singolarmente.
— La forza centrifuga baricentrica Fcf è equilibrata dalle due reazioni
vincolari RcA e RcB, complanari ma di verso opposto alla forza centrifuga stessa (4Fig. 1.20a).
— Avendo assunto per ipotesi il momento Mcf orario, ne consegue che
nei supporti A e B nasceranno due reazioni vincolari RMA e RMB,
uguali e opposte, così da formare una coppia reattiva antioraria, pari al prodotto fra la singola reazione e il braccio b (4Fig. 1.20b).
4
ALberi e assi
A1
Meccanica, Macchine ed Energia – articolazione Meccanica e Meccatronica 3 – Giuseppe Anzalone, Paolo Bassignana, Giuseppe Brafa Musicoro • Copyright © Ulrico Hoepli Editore S.p.A.
— Le quattro reazioni vincolari sono vettori rotanti alla medesima velocità angolare del corpo.
Fig. 1.20
Reazioni vincolari dovute ai carichi
centrifughi:
a) reazioni alla forza centrifuga Fcf ;
b) reazioni al momento
di riequilibrio Mcf .
Su ogni supporto agiscono due forze, originate indipendentemente dai
due carichi esterni. Eseguendo la somma vettoriale delle due coppie di
vettori si ottengono le risultanti delle reazioni vincolari, indicate con RA
e RB (4Fig. 1.21). È importante notare come le due risultanti si presentino diverse sia come modulo sia come direzione; in pratica si tratta di
due vettori sghembi.
La presenza di queste due reazioni vincolari pregiudica l’affidabilità del corpo rotante, in quanto causa di sollecitazioni indesiderate, di
usure, vibrazioni e rumorosità spesso inaccettabili per un corretto funzionamento di un organo rotante, specie se ad alta velocità. Pertanto occorre intervenire in fase di progettazione e di produzione, per annullare
i loro effetti; tali interventi costituiscono l’operazione di equilibratura.
Fig. 1.21
Risultanti delle reazioni vincolari:
a) supporto A;
b) supporto B.
Il raggiungimento di un opportuno livello di equilibratura di un corpo
rotante è realizzato attraverso un insieme di interventi teorici e pratici
5
ALberi e assi
A1
Meccanica, Macchine ed Energia – articolazione Meccanica e Meccatronica 3 – Giuseppe Anzalone, Paolo Bassignana, Giuseppe Brafa Musicoro • Copyright © Ulrico Hoepli Editore S.p.A.
riguardanti l’architettura del corpo, allo scopo di attenuare, su livelli
di accettabilità, gli effetti della forza centrifuga risultante Fcf e del momento di riequilibrio Mcf .
Contrappesatura
poliglotta
Contrappeso
GB: Counterweight
F: Contrepoids
D: Gegengewicht
Il contrappeso è una massa eccentrica solidale con il corpo rotante, posizionato in modo da generare una forza centrifuga rotante alla medesima velocità del corpo. Questa forza centrifuga ha lo scopo di equilibrare
altri carichi squilibrati agenti sul corpo e conseguenti alla rotazione.
Si definisce contrappesatura qualunque intervento basato sull’aggiunta o sull’alleggerimento di opportune masse, allo scopo di raggiungere un adeguato livello di equilibratura di un corpo rotante.
Si definisce massa eccentrica una massa aggiuntiva o una parte
dell’organo rotante, avente il baricentro esterno all’asse di rotazione.
Prendendo come esempio il corpo rotante analizzato in precedenza,
avente le risultanti RA e RB delle reazioni vincolari sghembe, è possibile
eseguire un intervento di equilibratura. Si applicano due contrappesi
nelle immediate vicinanze dei supporti A e B, orientati in modo da risultare allineati e opposti alle suddette reazioni. Le rispettive masse mA
e mB sono sede, nei loro baricentri, di due forze centrifughe FcA e FcB,
anch’esse sghembe fra loro (4Fig. 1.22). In questo modo i supporti risultano scaricati e il funzionamento dell’organo rotante diviene affidabile e
privo di vibrazioni.
Fig. 1.22
Contrappesatura mediante
due masse eccentriche mA e mB;
le rispettive forze centrifughe
FcA e FcB sono uguali e contrarie
alle reazioni vincolari RA e RB.
6
ALberi e assi
A1
Meccanica, Macchine ed Energia – articolazione Meccanica e Meccatronica 3 – Giuseppe Anzalone, Paolo Bassignana, Giuseppe Brafa Musicoro • Copyright © Ulrico Hoepli Editore S.p.A.
In fase di progettazione sono previsti alcuni tratti del corpo rotante in
forma di contrappeso, dimensionati lievemente sovrabbondanti, in modo da garantire il raggiungimento di adeguati livelli di equilibratura,
tenendo conto delle dispersioni, in termini di tolleranze di forma e di
massa, durante la fase di produzione. L’intervento di equilibratura viene svolto ponendo il corpo in rotazione su particolari macchine, dette
macchine equilibratrici, che intervengono automaticamente eseguendo piccole asportazioni di massa dal corpo dei contrappesi. Questi
piccoli fori di alleggerimento sono ricavati sui contrappesi con opportuna angolatura; essi servono a regolare l’entità delle forze centrifughe
presenti nei contrappesi. La correzione dell’entità delle forze centrifughe, schematizzate nell’esempio precedente come FcA e FcB, consente di
raggiungere gli opportuni livelli di equilibratura previsti per un funzionamento regolare della macchina.
Nella figura 1.23 viene schematizzato un intervento di equilibratura
mediante asportazione di massa.
Fig. 1.23
Contrappeso con fori di
equilibratura.
poliglotta
Dispersione
GB: Scattering
F: Dispersion
D: Streuung
La superficie esterna di un contrappeso, in forma di disco eccentrico a
mezza luna, è destinata a ospitare i piccoli fori ciechi eseguiti in automatico dalla macchina equilibratrice. Il numero, l’angolatura e la profondità dei fori di alleggerimento variano per ogni singolo pezzo; infatti,
anche per produzioni in serie su macchine utensili automatiche, la distribuzione delle masse e la posizione del baricentro presentano sempre
una dispersione, cioè delle variazioni da un pezzo all’altro, magari di
lieve entità, ma decisive per definire l’accettabilità dal punto di vista
delle esigenze di equilibratura.
Equilibratura statica e dinamica
Esistono delle regole che permettono di avere informazioni sullo stato di
equilibratura dei corpi, nota la loro geometria e l’asse di rotazione.
È importante che all’atto della progettazione si attribuiscano forme
opportune ai corpi rotanti, in modo da ottenere il più alto livello di equilibratura possibile dal punto di vista teorico. Gli interventi di equilibratura eseguiti alle macchine equilibratrici risultano in tal caso di piccola
entità e di rapida realizzazione.
L’analisi dello stato di equilibratura dei corpi si basa sulla posizione
relativa del baricentro rispetto all’asse di rotazione e di questo rispetto
a eventuali assi di simmetria del corpo.
7
ALberi e assi
A1
Un corpo rotante è in condizione di equilibratura statica quando il
suo baricentro è posto sull’asse di rotazione. La forza centrifuga risultante è quindi nulla e il momento risultante è maggiore di 0:
Meccanica, Macchine ed Energia – articolazione Meccanica e Meccatronica 3 – Giuseppe Anzalone, Paolo Bassignana, Giuseppe Brafa Musicoro • Copyright © Ulrico Hoepli Editore S.p.A.
Fcf = 0;
Mc > 0
[1.60]
In tal caso, infatti, il raggio di rotazione rg del baricentro è nullo, come
riportato nello schema della figura 1.24a, e per la [1.58] anche la forza
centrifuga risultante è nulla.
Un corpo rotante è in condizione di equilibratura dinamica quando il
suo asse di rotazione coincide con uno degli assi di simmetria del corpo.
Sia la forza centrifuga risultante sia il momento risultante sono nulli:
Fcf = 0; Mc = 0
[1.61]
Fig. 1.24
Disco cilindrico rotante:
a) equilibrato staticamente;
b) equilibrato dinamicamente.
Nel caso assai frequente di assi, alberi, ruote, pulegge e dischi (tutti organi di forma assialsimmetrica), il corpo rotante ha la conformazione di
un cilindro, il cui asse di rotazione coincide con l’asse di simmetria, come riportato nello schema della figura 1.24b. Si noti come la condizione
di equilibratura dinamica è una condizione più forte rispetto all’equilibratura solamente statica poiché, se l’asse di rotazione è anche asse di
simmetria, sicuramente è anche asse baricentrico.
Osservazione: come regola generale di progetto, va ricordato che i problemi di equilibratura sono facilmente risolvibili se si riesce a rendere
leggeri gli organi delle macchine; tutto ciò, ovviamente, non deve andare
a scapito della rigidezza.
Si osservino i seguenti esempi di corpi in rotazione.
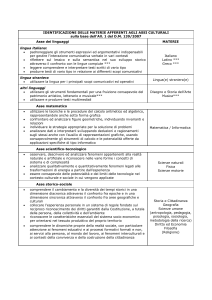
Nella figura 1.25 è illustrato un rettangolo rotante intorno a un asse
baricentrico parallelo alle altezze e intorno a una diagonale:
— nel primo caso (4Fig. 1.25a), l’asse di rotazione è asse di simmetria,
l’equilibratura è di tipo dinamico e le forze centrifughe delle due metà sinistra e destra risultano uguali e opposte;
— nel secondo caso (4Fig. 1.25b), l’asse di rotazione divide il rettangolo in due triangoli uguali e antimetrici; i baricentri delle due metà,
8
ALberi e assi
A1
Meccanica, Macchine ed Energia – articolazione Meccanica e Meccatronica 3 – Giuseppe Anzalone, Paolo Bassignana, Giuseppe Brafa Musicoro • Copyright © Ulrico Hoepli Editore S.p.A.
sinistra e destra, sono ad altezze diverse e le rispettive forze centrifughe risultano uguali, opposte e parallele, formando una coppia e
confermando la [1.60].
Fig. 1.25
Equilibratura statica e dinamica
per diversi corpi:
a) rettangolo verticale;
b) rettangolo inclinato;
c) cilindro.
Nella figura 1.25c è disegnato un cilindro con i tre assi baricentrici; esso
è in condizioni di equilibratura dinamica se posto in rotazione intorno a
uno qualunque dei tre assi x, y, z.
richiamo
I fondamenti teorici riguardanti
gli assi principali d’inerzia sono
riportati nella A5 del Volume 1.
Per ricavare la posizione degli assi
centrali principali d’inerzia nei corpi
privi di simmetria esistono formule
specifiche per le quali si rimanda a
testi specialistici o ai manuali tecnici.
9
ALberi e assi
Osservazione: per ottenere l’equilibratura completa, la regola fondamentale consiste nel far coincidere l’asse previsto di rotazione con un asse
di simmetria o con un asse baricentrico, perpendicolare a un asse o a
un piano di simmetria. Nel caso in cui il corpo non ammetta nessuna
simmetria, occorre individuare la terna degli assi centrali principali
d’inerzia; in tal caso il corpo è in condizioni di equilibratura dinamica se l’asse di rotazione coincide con uno dei tre assi centrali principali
d’inerzia (4Fig. 1.25c).
Nella figura 1.26a, b sono disegnati due solidi con particolari condizioni
di simmetria. Entrambi ammettono un piano di simmetria orizzontale su cui è posto l’asse x baricentrico; i due solidi sono in condizioni di
equilibratura dinamica, se posti in rotazione intorno all’asse x, oppure
anche intorno all’asse y, non di simmetria, ma perpendicolare al piano
A1
Meccanica, Macchine ed Energia – articolazione Meccanica e Meccatronica 3 – Giuseppe Anzalone, Paolo Bassignana, Giuseppe Brafa Musicoro • Copyright © Ulrico Hoepli Editore S.p.A.
di simmetria. Nella figura 1.26c è disegnata una figura piana a L priva
di simmetrie; essa può essere posta in rotazione in condizioni di equilibratura dinamica, se l’asse di rotazione coincide con uno dei due assi
centrali principali d’inerzia u oppure v.
Fig. 1.26
Equilibratura dinamica:
a) a forma di piramide;
b) a forma di C;
c) solido a L.
Qualità dell’equilibratura
poliglotta
Squilibrio residuo
GB: Residual unbalance
F: Résidu de déséquilibre
D: Unwuchtsrückstand
Grazie al livello di precisione raggiunto dalle attuali macchine equilibratrici, lo squilibrio residuo può essere ridotto su livelli decisamente bassi.
Appare, tuttavia, antieconomico imporre livelli minimi di squilibrio
residuo, per applicazioni che non necessitano di precisioni elevate o destinate a funzionare con frequenze di rotazione relativamente modeste.
È importante, a questo punto, definire fino a quale livello di tolleranza si debba spingere il limite di squilibrio residuo, alla luce delle esigenze sia di natura economica sia di affidabilità, e tenendo conto delle
aspettative del mercato in termini di comfort acustico e vibrazionale.
È praticamente impossibile fissare valori definitivi e comunque universalmente validi riguardanti lo squilibrio residuo ammissibile per
ogni singolo caso reale, dato che il più delle volte non è possibile formulare una relazione assolutamente certa che leghi lo squilibrio con lo stato vibrazionale della macchina in condizione di lavoro. L’ampiezza della
vibrazione registrata su un componente della macchina è influenzata
da molti fattori, esterni all’organo rotante in questione, quali la massa e
la rigidezza del telaio della macchina, le sue fondazioni sotto pavimento, la natura del pavimento stesso, i cuscinetti di supporto dell’organo
rotante, la prossimità della velocità di rotazione con le frequenze risonanti dei vari organi che compongono la macchina, e così via. Ne consegue che il complesso delle vibrazioni registrate sulla macchina possono
essere ricondotte solo in parte alla presenza di squilibrio residuo sull’organo rotante.
La Raccomandazione ISO 1940
Le norme ISO hanno emesso un documento denominato Raccoman­
dazione 1940 in merito alla qualità dell’equilibratura dei corpi ro­
tanti; essa pone in relazione lo squilibrio residuo ammissibile con la
massima velocità di funzionamento del corpo rotante. Il documento è
strutturato in modo da classificare gli organi rotanti in base ai prin-
10
ALberi e assi
A1
Meccanica, Macchine ed Energia – articolazione Meccanica e Meccatronica 3 – Giuseppe Anzalone, Paolo Bassignana, Giuseppe Brafa Musicoro • Copyright © Ulrico Hoepli Editore S.p.A.
cipali campi di applicazione, cui sono fatti corrispondere i vari gradi
di qualità di equilibratura raccomandati, di seguito indicati con la
lettera G.
Dalla tabella 1.3 (estratta dalla Raccomandazione ISO 1940) è possibile osservare i gradi di qualità G di equilibratura raccomandati, indicati nella prima colonna, e la velocità periferica del baricentro vg massima ammessa, indicata nella seconda colonna e ottenuta dal prodotto fra
lo squilibrio specifico e e la velocità angolare ω [rad/s]:
vg = ω rg = e ω
[1.62]
Nella terza colonna, infine, sono riportati alcuni esempi di applicazioni
dei corpi rotanti.
Tabella 1.3Gradi di qualità di equilibratura per varie tipologie rappresentative
di corpi rotanti rigidi
e ω
G
Tipo di organo rotante e applicazioni generali
G 4000
4000
Alberi a gomiti per motori marini lenti rigidamente montati
G 1600
1600
Alberi a gomiti per grandi motori a due tempi rigidamente montati
G 630
630
Alberi a gomiti per grandi motori a quattro tempi rigidamente montati
G 250
250
Alberi a gomiti per motori Diesel veloci a quattro cilindri rigidamente montati
Alberi a gomiti per motori Diesel veloci a sei o più cilindri; motopropulsori per autoveicoli,
100
autocarri e locomotori
G 100
G 40
Ruote per autoveicoli, alberi di trasmissione; alberi a gomiti per motori veloci a sei o più cilindri
40
montati su supporti elastici; trasmissioni per autoveicoli, autocarri e locomotori
G 16
Alberi di trasmissione con esigenze speciali; componenti di motori; alberi a gomiti per motori
16
veloci a sei o più cilindri montati con esigenze speciali
G 6,3
Parti di macchine utensili e per la produzione; riduttori a ingranaggi delle turbine a gas per la
6,3
propulsione marina; tamburi centrifughi; ventilatori; rotori assemblati per turbine per aeromobili;
giranti di pompe; rotori dei motori elettrici
G 2,5
Turbine a gas e a vapore; rotori rigidi dei turboalternatori; turbocompressori; turbopompe;
2,5
trasmissioni delle macchine utensili; rotori dei motori elettrici con esigenze speciali
G 1,0
Trasmissioni di registratori; trasmissioni delle rettificatrici; piccoli rotori dei motori elettrici
1,0
con esigenze speciali
G 0,4
0,4
Mandrini, dischi e rotori dei motori elettrici per rettificatrici; giroscopi
Si può affermare in generale che, più grande è la massa del corpo rotante, maggiore risulta il valore dello squilibrio ammissibile, a pari squilibrio specifico.
È conveniente porre in relazione lo squilibrio specifico con la massa
del corpo rotante; a tale scopo la Raccomandazione ISO 1940 introduce
il concetto di squilibrio residuo ammissibile U:
lo squilibrio residuo ammissibile U è pari al prodotto fra lo squilibrio
specifico e la massa del corpo ed è espresso in grammi per millimetro:
11
ALberi e assi
U = m e
[1.63]
A1
Meccanica, Macchine ed Energia – articolazione Meccanica e Meccatronica 3 – Giuseppe Anzalone, Paolo Bassignana, Giuseppe Brafa Musicoro • Copyright © Ulrico Hoepli Editore S.p.A.
Esempio
Un rotore, avente massa m = 40 kg, ruota intorno a un asse fisso alla
frequenza di rotazione n = 3000 giri/min. Al rotore è attribuito il grado di qualità di equilibratura G 6,3. Calcolare lo squilibrio specifico, lo
squilibrio residuo e la forza centrifuga.
Soluzione
Si calcola dapprima la velocità angolare:
ω=
2 π n 2 π 3000
rad
=
= 314
60
60
s
Dalla [1.62] si estrae il raggio e = r:
e=
v 6, 3
=
= 20 × 10−3 mm = 20 µm
ω 314
Dalla [1.63] si calcola lo squilibrio residuo U:
U = m e = 40 × 20 × 10-6 = 800 × 10-6 kg m = 800 g mm
Dalla [1.58] si desume la forza centrifuga rotante Fcf applicata nel baricentro:
Fcf = m ω 2 r = 40 × 3142 × 20 × 10-6= 78,9 N
12
ALberi e assi
A1
L’Unità didattica in breve
A1
Generalità su alberi e assi
Meccanica, Macchine ed Energia – articolazione Meccanica e Meccatronica 3 – Giuseppe Anzalone, Paolo Bassignana, Giuseppe Brafa Musicoro • Copyright © Ulrico Hoepli Editore S.p.A.
Nella terminologia tecnica gli alberi indicano gli organi meccanici cilindrici di una macchina in grado di trasmettere o ricevere coppie motrici
o resistenti, fra gli organi rotanti (come le ruote dentate e le pulegge)
montati su di essi.
Gli alberi sono quindi soggetti a sollecitazioni di torsione, di
flessione e di taglio. Quando gli alberi non trasmettono un momento
torcente, ma si limitano a mantenere in posizione organi meccanici, come per esempio le ruote di un carro ferroviario, sono detti assi o assali
e possono essere fissi o rotanti; gli assi, pertanto, sono sollecitati solo a
flessione e taglio. Negli alberi e negli assi vi sono alcune parti di forma cilindrica, dette perni, con cui sono a contatto i cuscinetti, montati
internamente ai supporti, i quali sostengono le spinte trasmesse all’albero. Se la direzione delle forze agenti è normale all’asse di rotazione
dell’albero, i perni e i cuscinetti si definiscono portanti o radiali e possono essere di estremità o intermedi. Quando invece la linea d’azione del carico coincide con l’asse di rotazione dell’albero, i perni e i cu­
scinetti sono detti di spinta o assiali; i cuscinetti sono anche definiti
reggispinta.
Il materiale utilizzato per la costruzione degli assi e degli alberi è
solitamente acciaio al carbonio, avente una resistenza poco elevata
(S 235, S 275, S 355, E 295, E 335). Nelle costruzioni automobilistiche e
aeronautiche, dove le condizioni di lavoro sono più gravose, si usano acciai
da bonifica, anche legati (C 25, C 40, 41 Cr 4, 34 CrMo 4, 36 CrNiMo 4).
Dimensionamento degli alberi e degli assi
Il dimensionamento degli alberi e degli assi si basa principalmente
sulla condizione di resistenza alle sollecitazioni indotte dalle forze e dai
momenti esterni, pertanto si applicano le equazioni di resistenza alla
flessione, alla torsione o alla flesso-torsione.
Per l’asse fisso il dimensionamento viene effettuato a flessione semplice. Se il carico agente è costante, anche la tensione normale σ da esso
indotta è costante; al contrario, se il carico è variabile anche la tensione
indotta è variabile, e precisamente, di tipo pulsante. Nel primo caso si
assume una tensione normale ammissibile statica σams, mentre nel secondo caso si considera una tensione normale ammissibile a fatica pulsante σ'amf .
Per l’asse rotante le tensioni indotte sono variabili, di tipo alternato, e il dimensionamento dev’essere effettuato a flessione rotante. Se
l’asse ruota solidale con gli organi su di esso posizionati, il carico genera
una tensione σ variabile di tipo alternato, pertanto si considera la tensione normale ammissibile a fatica alternata σamf .
Gli alberi si dimensionano a torsione semplice quando i momenti flettenti sono trascurabili rispetto al momento torcente trasmesso;
in questo caso l’albero è soggetto solo alla sollecitazione di torsione.
13
ALberi e assi
A1
Meccanica, Macchine ed Energia – articolazione Meccanica e Meccatronica 3 – Giuseppe Anzalone, Paolo Bassignana, Giuseppe Brafa Musicoro • Copyright © Ulrico Hoepli Editore S.p.A.
La sollecitazione di torsione può essere costante, generando tensioni tangenziali costanti, oppure variabile periodicamente nel tem­
po, generando tensioni tangenziali pulsanti; di conseguenza, nel primo
caso la tensione tangenziale ammissibile sarà di tipo statico, mentre nel
secondo caso essa sarà a fatica pulsante. Poiché spesso gli alberi trasmettono momenti torcenti contemporaneamente a momenti flettenti
non trascurabili, si ritengono sollecitati da una sollecitazione composta
di flesso-torsione; dal momento che gli alberi sono considerati sempre
sollecitati a fatica alternata rispetto alla flessione, si adotta la tensione
normale ammissibile a fatica alternata σamf .
A parte le sollecitazioni di taglio, trascurate perché hanno un effetto minimo, i momenti flettenti dipendono dalle dimensioni dell’asse o
dell’albero, che devono essere determinate. Nella pratica si esegue un
dimensionamento di massima in base al solo momento torcente, trascurando i momenti flettenti. Ottenuto il valore di prima approssimazione
del diametro dell’albero, si ricavano le lunghezze dei mozzi degli organi
rotanti, dei perni, le distanze fra essi e i supporti, nonché le distanze fra
i supporti stessi; in seguito si determina la posizione delle forze applicate
e si calcolano le reazioni dei supporti (reazioni vincolari). Infine si effettua la verifica di resistenza a flesso-torsione nelle sezioni ritenute più
pericolose, ossia più sollecitate. A tale proposito, se le forze che sollecitano a flessione l’albero sono sghembe fra loro, ovvero non giacenti sullo
stesso piano, vengono scomposte secondo due piani ortogonali, in genere
quello orizzontale e quello verticale.
Negli alberi può essere necessario limitare le deformazioni concernenti i valori assoluti o relativi, rispettivamente, delle frecce dovute alla
flessione e delle rotazioni dovute alla torsione. Spesso occorre limitare anche le rotazioni prodotte dalla flessione, affinché l’inclinazione dei
perni nei cuscinetti non risulti eccessiva.
Quando gli alberi devono trasmettere forti momenti torcenti, anche
in presenza di urti, e le linguette risultano insufficienti, oppure quando
è necessario un adeguato centraggio fra l’albero e il mozzo, oltre alla
possibilità di realizzare accoppiamenti scorrevoli si utilizzano alberi a
profilo scanalato.
Perni portanti e di spinta
Le parti dell’albero impegnate sui cuscinetti, dette perni portanti, possono essere di estremità o intermedi. Un perno di estremità è considerato come una trave incastrata a un estremo e caricato uniformemente
per tutta la lunghezza, per cui risulta sollecitato a flessione e taglio. Trascurando la sollecitazione di taglio, si esegue il calcolo del diametro d del
perno mediante l’equazione di stabilità a flessione alternata.
I perni portanti intermedi sono generalmente sollecitati a flessotorsione. Calcolato il diametro del perno, occorre eseguire la verifica a
pressione specifica e la verifica a riscaldamento.
I perni di spinta sono caricati da forze, la cui linea d’azione coincide con l’asse geometrico di rotazione, e possono essere collocati all’estremità dell’albero o in altra posizione intermedia.
14
ALberi e assi
A1
Meccanica, Macchine ed Energia – articolazione Meccanica e Meccatronica 3 – Giuseppe Anzalone, Paolo Bassignana, Giuseppe Brafa Musicoro • Copyright © Ulrico Hoepli Editore S.p.A.
Il dimensionamento dei perni di spinta, costituiti da una sola ralla piana circolare o anulare, è basato principalmente sulla limitazione
della pressione specifica e del riscaldamento. Per il dimensionamento
dei perni di spinta ad anelli multipli occorre tenere conto anche della
resistenza del perno alle sollecitazioni flessionali, generate dai carichi
esterni nella sezione di attacco all’albero.
Oscillazioni meccaniche
Il moto di una particella o di un corpo è detto oscillatorio, o vibrato­
rio, quando si muove alternativamente nei due versi sullo stesso percorso.
Spesso il moto oscillatorio dei corpi non avviene fra i limiti fissi, poiché le forze d’attrito dissipano l’energia del moto, pertanto in questi casi
si parla di moti oscillatori smorzati e il moto è definito aperiodico.
Quando un corpo viene allontanato dalla posizione di equilibrio, corrispondente alla condizione in cui sul corpo non agisce alcuna forza, e
quindi abbandonato a se stesso, si dice che effettua oscillazioni natu­
rali o libere, la cui pulsazione ωn è detta per l’appunto naturale.
Si ha una condizione differente quando il corpo è soggetto a una forza esterna periodica; in questo caso le oscillazioni sono dette forzate
e hanno la frequenza (quindi la pulsazione) della forza esterna e non
quella delle oscillazioni naturali del corpo. Tuttavia, la risposta del corpo alla sollecitazione esterna dipende dalla relazione fra la frequenza di
questa e quella naturale del corpo.
Nel caso di oscillazioni smorzate, vi è un valore caratteristico della
pulsazione esterna, in corrispondenza del quale l’ampiezza dell’oscillazione forzata è massima; tale condizione è detta risonanza. Le oscillazioni forzate si dividono, secondo la causa che le ha generate, in oscilla­
zioni flessionali e oscillazioni torsionali.
Le oscillazioni flessionali sono originate dalle forze centrifughe,
che generano inflessioni in direzione continuamente variabile; esse derivano essenzialmente dalla non perfetta coassialità delle masse che costituiscono un corpo rotante.
Le oscillazioni torsionali hanno origine invece da variazioni periodiche dei momenti torcenti applicati al corpo rotante. In una trasmissione sono presenti oscillazioni torsionali anche nel caso, a prima vista
costante, dei motori elettrici o delle turbine. Poiché il momento torcente
è una funzione variabile periodicamente, si può esprimere come somma
dell’armonica fondamentale e delle armoniche con frequenza doppia,
tripla, e così via, di quella fondamentale.
Quando una delle frequenze delle armoniche di eccitazione coincide con una delle frequenze di risonanza della trasmissione, ossia
con una delle frequenze proprie dell’albero, possono generarsi, in relazione agli smorzamenti, oscillazioni di considerevole ampiezza. Ogni velocità per la quale si verifica tale condizione è detta velocità critica
torsionale dell’albero.
Un corpo che ruota attorno a un asse fisso nello spazio, per effetto
delle forze centrifughe agenti su ciascuno dei suoi elementi di massa,
15
ALberi e assi
A1
Meccanica, Macchine ed Energia – articolazione Meccanica e Meccatronica 3 – Giuseppe Anzalone, Paolo Bassignana, Giuseppe Brafa Musicoro • Copyright © Ulrico Hoepli Editore S.p.A.
tende a traslare e a deviare il suo asse di rotazione; tali movimenti sono
impediti dalle reazioni dei cuscinetti. Tuttavia a causa dell’elasticità dei
materiali impiegati nella costruzione dell’albero e degli eventuali organi
rotanti su di esso calettati, possono generarsi, a un determinato regime
di rotazione, inflessioni di direzione continuamente variabile, manifestandosi così vibrazioni e oscillazioni dannose per l’integrità del pezzo.
La velocità critica flessionale di un sistema, alla quale le deformazioni in assenza di smorzamento diventano infinite, rappresenta la
pulsazione naturale o propria delle oscillazioni elastiche libere. Se la velocità di rotazione dell’albero è uguale alla velocità critica flessionale, la
freccia dell’albero diventa infinita; in tal caso si afferma che l’albero è in
condizioni di risonanza. Se la velocità di rotazione dell’albero è maggiore della velocità critica flessionale, la freccia diventa finita. Quando
la velocità di rotazione dell’albero tende all’infinito, si è in presenza
dell’autocentramento dei rotori alle velocità supercritiche. Infine se
la velocità di rotazione dell’albero è minore della velocità critica flessionale, la freccia dell’albero è tanto più piccola quanto minore è la velocità
dell’albero rispetto alla velocità critica flessionale.
Da quanto esposto, poiché in prossimità della velocità critica si generano forti vibrazioni, tali da rendere dannoso il funzionamento, è necessario mantenere il regime normale della macchina lontano dal regime critico, ossia lontano dal valore della velocità critica flessionale.
Poiché il calcolo della velocità critica di un albero soggetto a carichi
multipli è più complesso, si utilizzano metodi approssimati; uno di questi è proprio la formula di Dunkerley. Un albero a carichi multipli presenta tante velocità critiche quante sono le masse calettate su di esso; la
formula di Dunkerley, i cui risultati sono sufficientemente approssimati,
consente di calcolare la prima velocità critica del sistema rotante.
Dinamica dei corpi rigidi rotanti
Tutti i corpi rotanti a forte velocità richiedono studi specifici e rilievi
sperimentali riguardanti la geometria delle masse e le sollecitazioni che
nascono, sia al loro interno sia sui supporti, in seguito all’alta frequenza
di rotazione raggiunta; tali sollecitazioni possono danneggiare il corpo in
modo irreparabile. Le attività di progettazione e di misura costituiscono
la teoria dell’equilibratura.
Si definisce equilibratura l’insieme delle analisi, di natura dinamica, vibrazionale ed elastica e dei processi, volti a migliorare la distribuzione delle masse dei corpi rotanti a forte velocità.
L’analisi dello stato di equilibratura dei corpi si basa sulla posizione
relativa del baricentro rispetto all’asse di rotazione, e di questo rispetto
a eventuali assi di simmetria del corpo. Un corpo rotante è in condizione
di equilibratura statica quando il suo baricentro è posto sull’asse di
rotazione. La forza centrifuga risultante è quindi nulla e il momento risultante è maggiore di 0. Un corpo rotante è in condizione di equilibra­
tura dinamica quando il suo asse di rotazione coincide con uno degli
assi di simmetria del corpo. La forza centrifuga risultante e il momento
risultante risultano nulli.
16
ALberi e assi
A1
Meccanica, Macchine ed Energia – articolazione Meccanica e Meccatronica 3 – Giuseppe Anzalone, Paolo Bassignana, Giuseppe Brafa Musicoro • Copyright © Ulrico Hoepli Editore S.p.A.
PROBLEMI DI RIEPILOGO
A1
1.Calcolare il diametro di un asse rotante, che sostiene un carico
Q = 710 daN applicato in mezzeria, sapendo che la distanza fra i
supporti è l = 600 mm. Si scelga come materiale l’acciaio S 275.
2.Determinare il diametro di un albero di lunghezza l = 800 mm, soggetto
alla forza F = 3930 N perpendicolare al suo asse, applicata in mezzeria,
che trasmette una potenza P = 19 kW, alla frequenza di rotazione
n = 500 giri/min. Si assuma come materiale l’acciaio C 25.
3.Eseguire la verifica di resistenza di un albero di diametro d = 52 mm,
su cui è calettata in mezzeria una puleggia con cinghia, di diametro
D = 500 mm e massa m = 62 kg, sapendo che le forze trasmesse dai
due rami della cinghia, dirette verso il basso, valgono F1 = 8100 N e
F2 = 2020 N e la distanza dai supporti misura l = 800 mm. Si scelga
l’acciaio C 40 come materiale impiegato per l’albero.
4.Dimensionare un albero scanalato per trasmettere una potenza
P = 4 kW, alla frequenza di rotazione n = 550 giri/min. Si consideri
un accoppiamento ampio e un mozzo scorrevole sotto carico, con una
lavorazione molto precisa e si scelga come materiale l’acciaio S 355.
5.Dimensionare uno dei perni di estremità dell’albero di una macchina
utensile sottoposto al carico F = 2200 daN, che ruota alla frequenza di
rotazione n = 350 giri/min. Si scelga come materiale l’acciaio S 275.
6.Un albero ha un diametro d = 56 mm e la distanza fra i suoi supporti
di estremità vale l = 2,5 m. Sapendo che alla distanza di un metro dal
supporto di destra è calettato un rotore di massa m = 130 kg, calcolare
il valore della velocità critica flessionale dell’albero.
7.Una turbina a vapore sviluppa una potenza P = 12 MW, alla frequenza
di rotazione n = 3000 giri/min. Sapendo che il peso della girante della
turbina è Q = 31 kN, la distanza dei due supporti dell’albero misura
l = 3,4 m e il materiale impiegato per realizzare l’albero è l’acciaio
legato da bonifica 42 CrMo 4, determinare il diametro dell’albero su
cui è calettata la girante e le dimensioni dei suoi perni di estremità,
tenendo conto che il baricentro della girante dista dal supporto di
sinistra di una lunghezza pari a l1 = 2 m.
17
ALberi e assi
A1