SINAMICS G120C
Convertitore di frequenza
Getting Started · 01/2011
SINAMICS
Answers for industry.
Convertitore di frequenza
1
___________________
Istruzioni di sicurezza
2
___________________
Introduzione
SINAMICS
SINAMICS G120C
Convertitore di frequenza
3
___________________
Installazione
4
___________________
Messa in servizio
5
___________________
Lista parametri
6
___________________
Eliminazione di errori
Getting Started
Edizione 01/2011, firmware V4.4
01/2011, FW 4.4
A5E02999802A AC
Avvertenze di legge
Avvertenze di legge
Concetto di segnaletica di avvertimento
Questo manuale contiene delle norme di sicurezza che devono essere rispettate per salvaguardare l'incolumità
personale e per evitare danni materiali. Le indicazioni da rispettare per garantire la sicurezza personale sono
evidenziate da un simbolo a forma di triangolo mentre quelle per evitare danni materiali non sono precedute dal
triangolo. Gli avvisi di pericolo sono rappresentati come segue e segnalano in ordine descrescente i diversi livelli
di rischio.
PERICOLO
questo simbolo indica che la mancata osservanza delle opportune misure di sicurezza provoca la morte o gravi
lesioni fisiche.
AVVERTENZA
il simbolo indica che la mancata osservanza delle relative misure di sicurezza può causare la morte o gravi
lesioni fisiche.
CAUTELA
con il triangolo di pericolo indica che la mancata osservanza delle relative misure di sicurezza può causare
lesioni fisiche non gravi.
CAUTELA
senza triangolo di pericolo indica che la mancata osservanza delle relative misure di sicurezza può causare
danni materiali.
ATTENZIONE
indica che, se non vengono rispettate le relative misure di sicurezza, possono subentrare condizioni o
conseguenze indesiderate.
Nel caso in cui ci siano più livelli di rischio l'avviso di pericolo segnala sempre quello più elevato. Se in un avviso
di pericolo si richiama l'attenzione con il triangolo sul rischio di lesioni alle persone, può anche essere
contemporaneamente segnalato il rischio di possibili danni materiali.
Personale qualificato
Il prodotto/sistema oggetto di questa documentazione può essere adoperato solo da personale qualificato per il
rispettivo compito assegnato nel rispetto della documentazione relativa al compito, specialmente delle avvertenze
di sicurezza e delle precauzioni in essa contenute. Il personale qualificato, in virtù della sua formazione ed
esperienza, è in grado di riconoscere i rischi legati all'impiego di questi prodotti/sistemi e di evitare possibili
pericoli.
Uso conforme alle prescrizioni di prodotti Siemens
Si prega di tener presente quanto segue:
AVVERTENZA
I prodotti Siemens devono essere utilizzati solo per i casi d’impiego previsti nel catalogo e nella rispettiva
documentazione tecnica. Qualora vengano impiegati prodotti o componenti di terzi, questi devono essere
consigliati oppure approvati da Siemens. Il funzionamento corretto e sicuro dei prodotti presuppone un trasporto,
un magazzinaggio, un’installazione, un montaggio, una messa in servizio, un utilizzo e una manutenzione
appropriati e a regola d’arte. Devono essere rispettate le condizioni ambientali consentite. Devono essere
osservate le avvertenze contenute nella rispettiva documentazione.
Marchio di prodotto
Tutti i nomi di prodotto contrassegnati con ® sono marchi registrati della Siemens AG. Gli altri nomi di prodotto
citati in questo manuale possono essere dei marchi il cui utilizzo da parte di terzi per i propri scopi può violare i
diritti dei proprietari.
Esclusione di responsabilità
Abbiamo controllato che il contenuto di questa documentazione corrisponda all'hardware e al software descritti.
Non potendo comunque escludere eventuali differenze, non possiamo garantire una concordanza perfetta. Il
contenuto di questa documentazione viene tuttavia verificato periodicamente e le eventuali correzioni o modifiche
vengono inserite nelle successive edizioni.
Siemens AG
Industry Sector
Postfach 48 48
90026 NÜRNBERG
GERMANIA
A5E02999802A AC
Ⓟ 03/2011
Copyright © Siemens AG 2011.
Con riserva di eventuali modifiche tecniche
Indice del contenuto
1
Istruzioni di sicurezza ................................................................................................................................ 5
2
Introduzione............................................................................................................................................... 7
3
4
2.1
Convertitore di frequenza SINAMICS G120C................................................................................7
2.2
Utensili per la messa in servizio.....................................................................................................8
Installazione............................................................................................................................................... 9
3.1
Dimensioni .....................................................................................................................................9
3.2
Collegamenti di potenza ..............................................................................................................11
3.3
Interfacce di processo e interfacce utente ...................................................................................14
3.4
Morsettiere sul convertitore di frequenza.....................................................................................15
3.5
Configurazione I/O definita ..........................................................................................................16
Messa in servizio ..................................................................................................................................... 21
4.1
Struttura del menu del BOP-2......................................................................................................22
4.2
Messa in servizio di base.............................................................................................................23
4.3
Libera selezione e modifica dei parametri ...................................................................................24
4.4
Modifica della funzione di un morsetto ........................................................................................25
4.5
Abilitazione di "Safe Torque Off"..................................................................................................26
4.6
Acquisizione del file GSD.............................................................................................................26
5
Lista parametri......................................................................................................................................... 27
6
Eliminazione di errori ............................................................................................................................... 41
6.1
Lista degli avvisi e delle anomalie ...............................................................................................41
6.2
Ulteriori informazioni ....................................................................................................................46
Convertitore di frequenza
Getting Started, 01/2011, FW 4.4, A5E02999802A AC
3
Indice del contenuto
Convertitore di frequenza
4
Getting Started, 01/2011, FW 4.4, A5E02999802A AC
Istruzioni di sicurezza
1
Il costruttore della macchina deve assicurare che i dispositivi di protezione contro la
sovracorrente lato rete interrompano il circuito di corrente entro 5 secondi (equipaggiamenti
non mobili e moduli in equipaggiamenti non mobili) nel caso si verifichi una corrente di
dispersione minima (corrente di parti conduttrici accessibili in caso di avaria completa
dell'isolamento, che durante il funzionamento non conducono tensione, e resistenza di
corrente massima) .
PERICOLO
Rischio di
folgorazione
Dopo aver disinserito l'alimentazione di corrente, restano presenti tensioni pericolose
ancora per 5 minuti.
Non effettuare alcun intervento prima che sia trascorso questo lasso di tempo.
AVVERTENZA
Informazioni
generali
Questa apparecchiatura è soggetta ad alte tensioni e controlla parti meccaniche rotanti
potenzialmente pericolose.
La protezione contro i contatti diretti mediante SELV / PELV è consentita solo in zone con
compensazione di potenziale e in ambienti interni asciutti. Se queste condizioni non sono
soddisfatte, occorre adottare altre misure protettive contro le scosse elettriche ad es. un
isolamento di protezione.
Il convertitore deve essere sempre dotato di messa a terra. Dato che la corrente di
dispersione verso terra per questo prodotto può superare i 3,5 mA AC, è necessario un
collegamento di messa a terra fisso e la grandezza minima del conduttore di protezione
deve essere conforme alle prescrizioni di sicurezza locali per gli equipaggiamenti con una
corrente di dispersione elevata.
Installare il convertitore di frequenza su una piastra di montaggio in metallo. La piastra di
montaggio non deve essere verniciata e deve avere una buona conduttività elettrica.
È assolutamente vietato scollegare la rete lato motore del sistema se il convertitore è in
funzione e la corrente di uscita non è uguale a zero.
In particolare attenersi alle disposizioni generali e regionali in materia di installazione e
sicurezza per gli interventi sugli impianti con tensioni pericolose (ad es. EN 50178) nonché
alle norme vigenti sull'uso corretto di utensili ed equipaggiamenti di protezione personale
(Personal Protective Equipment, PPE).
CAUTELA
Scariche statiche su superfici o interfacce non facilmente accessibili (ad es. morsetti o pin
di connettori) possono causare malfunzionamenti o guasti. Per questo motivo vanno
osservate le misure di protezione ESD in caso di interventi su convertitori di frequenza o
componenti di convertitori.
Convertitore di frequenza
Getting Started, 01/2011, FW 4.4, A5E02999802A AC
5
Istruzioni di sicurezza
Trasporto e
CAUTELA
immagazzinaggio L'entità delle vibrazioni e degli urti meccanici durante il trasporto e l'immagazzinaggio deve
essere conforme alla classe 2M3 secondo EN 60721-3-2. È importante proteggere
l'apparecchio dal contatto con l'acqua (pioggia) e dalle temperature estreme.
Installazione e
AVVERTENZA
messa in servizio Nelle aree dei dispositivi di comando in cui eventuali guasti possono provocare ingenti
danni materiali o gravi lesioni personali, si devono prevedere misure precauzionali esterne
o si devono installare dispositivi che garantiscano un funzionamento sicuro anche in caso
di guasto (ad es. limitatori indipendenti, blocchi meccanici, ecc.)
In funzionamento
AVVERTENZA
Pertanto tutti i dispositivi di arresto di emergenza devono funzionare correttamente
secondo EN 60204, IEC 204 (VDE 0113) in tutti i modi operativi dei dispositivi di comando.
La disinserzione di un dispositivo di arresto di emergenza non deve causare un riavvio
incontrollato o indefinito dell'impianto.
AVVERTENZA
Gli azionamenti con filtro devono essere collegati soltanto a reti di alimentazione di corrente
con centro stella messo a terra.
CAUTELA
Questo dispositivo è idoneo per la tensione nominale massima + 10 % in una rete di
alimentazione di corrente fino a 10.000 A (simmetrica, valore efficace), se è protetto con un
corrispondente fusibile standard (per il tipo di fusibile, vedere il catalogo).
AVVERTENZA
Incendio, gravi
danni materiali e
personali
Riparazione
L'impiego di una resistenza di frenatura non idonea può causare incendi nonché gravi
danni materiali e personali. Non solo si deve impiegare la resistenza di frenatura corretta,
ma anche montarla correttamente secondo le istruzioni allegate alla resistenza di frenatura.
La temperatura delle resistenze di frenatura aumenta molto durante il funzionamento. Per
questo motivo occorre assolutamente evitare un contatto diretto con le resistenze di
frenatura. Garantire sufficiente spazio libero e sufficiente ventilazione attorno
all'apparecchiatura.
AVVERTENZA
Le riparazioni sulle apparecchiature possono essere effettuate solo dal servizio di
assistenza tecnica Siemens, dai centri di riparazione autorizzati dalla Siemens o da
personale autorizzato con conoscenze approfondite su tutte le avvertenze di sicurezza e
sulle istruzioni di lavoro contenute in questo manuale.
Tutti i pezzi o i componenti guasti devono essere sostituiti con pezzi compresi nella lista
ufficiale dei pezzi di ricambio.
Convertitore di frequenza
6
Getting Started, 01/2011, FW 4.4, A5E02999802A AC
Introduzione
2
Introduzione
Il manuale Getting Started descrive l'installazione e la messa in servizio di base del
convertitore SINAMICS G120C.
2.1
Convertitore di frequenza SINAMICS G120C
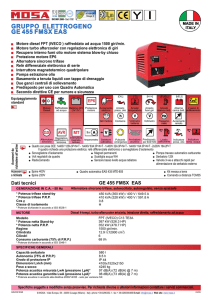
SINAMICS G120C definisce una serie di convertitori di frequenza per il controllo del numero
di giri di motori trifase. Il convertitore di frequenza è disponibile in tre grandezze costruttive.
3RWHQ]DGLXVFLWD &RUUHQWHGL
1GLRUGLQD]LRQH
QRPLQDOH
XVFLWDQRPLQDOH
*UDQGH]]DFRVWUXWWLYD$
EDVDWDVXXQVRYUDFFDULFRSL»EDVVR
6HQ]DILOWUR
&RQILOWUR
N:
N:
N:
N:
N:
N:
N:
$
$
$
$
$
$
$
6/.(8
6/.(8
6/.(8
6/.(8
6/.(8
6/.(8
6/.(8
6/.($
6/.($
6/.($
6/.($
6/.($
6/.($
6/.($
N:
N:
$
$
6/.(8
6/.(8
6/.($
6/.($
N:
N:
N:
$
$
$
6/.(8
6/.(8
6/.(8
6/.($
6/.($
6/.($
*UDQGH]]DFRVWUXWWLYD%
*UDQGH]]DFRVWUXWWLYD&
8660RGEXV578
352),%86'3
&$1RSHQ
%
3
&
%
3
&
Convertitore di frequenza
Getting Started, 01/2011, FW 4.4, A5E02999802A AC
7
Introduzione
2.2 Utensili per la messa in servizio
2.2
Utensili per la messa in servizio
,23
%23
,23
+DQGKHOG
Tabella 2- 1
Componenti e strumenti per la messa in servizio e il salvataggio dati
Componente o strumento
N. di ordinazione
Pannelli operatore
BOP-2 - viene applicato sul convertitore di frequenza
6SL3255-0AA00-4CA1
IOP - viene applicato sul convertitore di frequenza o viene
usato come portatile
6SL3255-0AA00-4JA0
IOP portatile
6SL3255-0AA00-4HA0
Kit di montaggio per IOP/BOP-2, IP54/UL tipo 12
6SL3256-0AP00-0JA0
STARTER
Tool di messa in servizio (software PC) - viene collegato
tramite cavo USB al convertitore di frequenza
STARTER può essere acquistato su
DVD (n. di ordinazione: 6SL3072-0AA000AG0)
o può essere scaricato da Internet:
Download di Starter
(http://support.automation.siemens.com/
WW/view/it/10804985/133100)
Set di
collegamento PC
contiene il DVD STARTER e un cavo USB
6SL3255-0AA00-2CA0
Drive ES Basic
per la messa in servizio del convertitore di frequenza
tramite interfaccia PROFIBUS; implementa STARTER
6SW1700-5JA00-4AA0
Scheda di memoria opzionale per la
memorizzazione e la trasmissione delle
impostazioni del convertitore di frequenza
Scheda MMC
6SL3254-0AM00-0AA0
Scheda SD
6ES7954-8LB00-0AA0
Convertitore di frequenza
8
Getting Started, 01/2011, FW 4.4, A5E02999802A AC
3
Installazione
3.1
Dimensioni
Dimensioni, dime di foratura e distanze minime
Grandezza costruttiva A, 0,55 kW … 4,0 kW
Dima di foratura [mm]
&RQ,23
Dimensioni [mm]
$ULD
Distanze dalle altre
apparecchiature [mm]
)LVVDJJL
[YLWL0
[GDGL0
[URQGHOOH0
&RSSLDGLVHUUDJJLRb1P
Convertitore di frequenza
Getting Started, 01/2011, FW 4.4, A5E02999802A AC
9
Installazione
3.1 Dimensioni
Grandezza costruttiva B, 5,5 kW … 7,5 kW
)LVVDJJL
[YLWL0
[GDGL0
[URQGHOOH0
&RSSLDGLVHUUDJJLRb1P
Dima di foratura [mm]
&RQ,23
$ULD
Dimensioni [mm]
Distanze dalle altre
apparecchiature [mm]
Grandezza costruttiva C, 11 kW … 18,5 kW
&RQ,23
Dima di foratura [mm]
$ULD
Dimensioni [mm]
Distanze dalle altre
apparecchiature [mm]
)LVVDJJL
[YLWL0
[GDGL0
[URQGHOOH0
&RSSLDGLVHUUDJJLRb1P
Convertitore di frequenza
10
Getting Started, 01/2011, FW 4.4, A5E02999802A AC
Installazione
3.2 Collegamenti di potenza
3.2
Collegamenti di potenza
5HWH
/
/
/
3(
$VHFRQGD
GHOO
DSSOLFD]LRQH
)XVLELOL
%RELQDGLUHWH
8
8
9
9
:
:
3(
3(
/
/
/
3(
5
5
$VHFRQGD
GHOO
DSSOLFD]LRQH
3LDVWUDGL
PRQWDJJLRLQ
PHWDOOR
5HVLVWHQ]DGLIUHQDWXUD
8 9 :
8 9
:
3(
0
Sezione del cavo consentita (coppia di serraggio)
Grandezza costruttiva del convertitore
Alimentazione di rete e motore
Resistenza di frenatura
A, 0,55 kW … 4,0 kW
2,5 mm² (0,5 Nm)
14 AWG (4,4 lbf in)
2,5 mm² (0,5 Nm)
B, 5,5 kW … 7,5 kW
6 mm² (0,6 Nm)
10 AWG (5,3 lbf in)
2,5 mm² (0,5 Nm)
14 AWG (4,4 lbf in)
C, 11,0 kW … 18,5 kW
16 mm² (1,5 Nm)
5 AWG (13,3 lbf in)
6 mm² (0,6 Nm)
10 AWG (5,3 lbf in)
Tabella 3- 1
14 AWG (4,4 lbf in)
Componenti esterni del convertitore
Grandezza costruttiva del
convertitore (FS) e potenza
nominale
Tipo di fusibile
standard
Tipo di fusibile
secondo UL e
cUL
Resistenza di frenatura
per frenatura reostatica
Bobina di rete per la
riduzione delle correnti
armoniche lato rete
FSA
0,55 kW … 1,1 kW
3NA3801 (6 A)
10 A Classe J
6SL3201-0BE14-3AA0
6SL3203-0CE13-2AA0
1,5 kW
3NA3803 (10 A)
10 A Classe J
3NA3805 (16 A)
15 A Classe J
5,5 kW
3NA3807 (20 A)
20 A Classe J
7,5 kW
3NA3810 (25 A)
25 A Classe J
11,0 kW
3NA3817 (40 A)
40 A Classe J
15,0 kW
3NA3820 (50 A)
50 A Classe J
18,5 kW
3NA3822 (63 A)
60 A Classe J
3,0 kW
6SL3203-0CE21-0AA0
6SL3201-0BE21-0AA0
2,2 kW
4,0 kW
FSB
FSC
6SL3201-0BE21-8AA0
6SL3203-0CE21-8AA0
6SL3201-0BE23-8AA0
6SL3203-0CE23-8AA0
Convertitore di frequenza
Getting Started, 01/2011, FW 4.4, A5E02999802A AC
11
Installazione
3.2 Collegamenti di potenza
Componenti per impianti negli Stati Uniti / Canada (UL/cUL)
Utilizzare fusibili certificati UL/cUL di classe J, interruttori automatici di sovraccarico o
impianti con dispositivi di protezione del motore a sicurezza intrinseca, per garantire che il
sistema sia conforme a UL/cUL. Utilizzare solo fili in rame di classe 1 75° C per tutte le
grandezze costruttive da A a C.
Installare il convertitore con un qualsiasi dispositivo anti-interferenza esterno raccomandato
con le seguenti caratteristiche:
Convertitore di frequenza
12
Getting Started, 01/2011, FW 4.4, A5E02999802A AC
Installazione
3.2 Collegamenti di potenza
● Dispositivi di protezione dalla sovratensione; l'apparecchio deve essere un dispositivo di
protezione dalla sovratensione con marchio Listed (numeri di controllo della categoria
VZCA e VZCA7)
● Tensione nominale trifase AC 480/277 V, 50/60 Hz
● Tensione al morsetto VPR = 2000 V, IN = 3 kA min, MCOV = AC 550 V, SCCR = 40 kA
● Adatto per applicazione SPD, tipo 1 o tipo 2
● Occorre provvedere ad un circuito di stabilizzazione tra le fasi ed anche tra la fase e la
massa
Installazione con conformità EMC
Regole per un'installazione secondo la direttiva
EMC:
•
Installare il convertitore di frequenza su una
piastra di montaggio in metallo. La piastra di
montaggio non deve essere verniciata e deve
presentare una buona conduttività elettrica.
•
Utilizzare per i seguenti collegamenti dei cavi
schermati:
– Motore e sensore di temperatura del
motore
– Resistenza di frenatura
– Interfaccia di processo (bus di campo,
ingressi ed uscite digitali ed analogici)
•
Per il collegamento dei cavi utilizzare un
morsetto per ogni cavo. Collegare la
schermatura con la piastra di montaggio o
con la piastra di schermatura utilizzando un
buon collegamento elettrico e la superficie
più grande possibile.
0RUVHWWR(0&SHU
VFKHUPDWXUDFDYR
/
/
/
3(
5
5
8
9
:
0RUVHWWL(0&SHU
VFKHUPDWXUDFDYR
&DYRFROOHJDWRD
PRUVHWWLHUD
5HWH
5HVLVWHQ]DGLIUHQDWXUD
8 9
3(
:
0
3UHPHUHOD
VFKHUPDWXUD
VXOODSLDVWUD Schermatura nell'esempio di un convertitore di grandezza costruttiva A
6FRSULUH
ODVFKHU
PDWXUDGHO
FDYR
$
$
Convertitore di frequenza
Getting Started, 01/2011, FW 4.4, A5E02999802A AC
13
Installazione
3.3 Interfacce di processo e interfacce utente
3.3
Interfacce di processo e interfacce utente
6ORWVFKHGDGLPHPRULDVFKHGH00&R6'
,QWHUIDFFLDSHU2SHUDWRU3DQHO%23R,23
,QWHUIDFFLD86%SHU67$57(5
/('GLVWDWR
5'<
%)
6$)(
',3VZLWFKSHULQGLUL]]REXV
%LW
%LW
%LW
%LW
%LW
%LW
%LW
21
2))
(VHPSLR
,QGLUL]]R 21 2))
',3VZLWFK
GHOO
LQJUHVVR &RUUHQWH7HQVLRQH
DQDORJLFR
$VHFRQGDGHOEXVGLFDPSR
7PRWRU
7PRWRU
*1'
',&20
',&20
',
',
',
',
',
',
*&8660%H*&&$1
&KLXVXUD
2)) 21
EXV
*&'3QHVVXQDIXQ]LRQH
0RUVHWWLHUH
'HQRPLQD]LRQHGHLPRUVHWWL
,QWHUIDFFLDEXVGLFDPSR
QF
QF
9RXW
*1'
$,
$,
$2
*1'
'2
'2
'212
'2&20
'21&
9RXW
&$1RSHQ
866R
0RGEXV578
352),%86
1RQXWLOL]]DWR
&$1B/VHJQDOH&$1GRPLQDQWHORZ
&$1B*1'ULIHULPHQWR&$1
1RQXWLOL]]DWR
&$1B6+/'VFKHUPDWXUDFDYRRS]LRQDOH
*1'ULIHULPHQWR&$1RS]LRQDOH
&$1B+VHJQDOH&$1GRPLQDQWHKLJK
1RQXWLOL]]DWR
1RQXWLOL]]DWR
9FROOHJDPHQWRDOODPDVVD
5635LFH]LRQHHLQYLR
5615LFH]LRQHHLQYLR
6FKHUPDWXUD
1RQXWLOL]]DWR
6FKHUPDWXUDFROOHJDPHQWRDOODPDVVD
1RQXWLOL]]DWR
5['7['3ULFH]LRQHLQYLRGDWL3%%
&1753VHJQDOHGLFRPDQGR
'*1'SRWHQ]LDOHGLULIHULPHQWRGDWL&&
93WHQVLRQHGLDOLPHQWD]LRQHSRVLWLYD
1RQXWLOL]]DWR
5['7['3ULFH]LRQHLQYLRGDWL1$$
1RQXWLOL]]DWR
Convertitore di frequenza
14
Getting Started, 01/2011, FW 4.4, A5E02999802A AC
Installazione
3.4 Morsettiere sul convertitore di frequenza
3.4
!N˖
Morsettiere sul convertitore di frequenza
0RUVHWWL
6SLHJD]LRQL
QF
1RQFROOHJDWR
9
1RQFROOHJDWR
8VFLWD9ULIHULWDD*1'PD[P$
3RWHQ]LDOHGLULIHULPHQWRWRWDOH
,QJUHVVRDQDORJLFR99P$P$P$P$
3RWHQ]LDOHGLULIHULPHQWRSHUO
LQJUHVVRDQDORJLFR
9
8VFLWDDQDORJLFD99P$P$
3RWHQ]LDOHGLULIHULPHQWRWRWDOH
8VFLWDGLJLWDOHSRVLWLYD$9'&
8VFLWDGLJLWDOHQHJDWLYD$9'&
QF
9RXW
*1'
$,
$,
$2
!N˖
9
9
702725
6HQVRUHGLWHPSHUDWXUDPRWRUHWHUPLVWRUH.7<RFRQWDWWR1&ELPHWDOOLFR
6HQVRUHGLWHPSHUDWXUDPRWRUHWHUPLVWRUH.7<RFRQWDWWR1&ELPHWDOOLFR
*1'
3RWHQ]LDOHGLULIHULPHQWRWRWDOH
',&20
3RWHQ]LDOHGLULIHULPHQWRSHULQJUHVVLGLJLWDOLH
3RWHQ]LDOHGLULIHULPHQWRSHULQJUHVVLGLJLWDOLH
,QJUHVVRGLJLWDOH
,QJUHVVRGLJLWDOH
,QJUHVVRGLJLWDOH
,QJUHVVRGLJLWDOH
,QJUHVVRGLJLWDOH
,QJUHVVRGLJLWDOH
8VFLWDGLJLWDOHFRQWDWWR12$9'&
8VFLWDGLJLWDOHFRQWDWWRFRPXQH
8VFLWDGLJLWDOHFRQWDWWR1&
8VFLWD9SRWHQ]LDOHGLULIHULPHQWR*1'PD[P$
*1'
'2
'2
702725
',&20
',
',
',
',
',
',
'212
'2&20
'21&
9RXW
9
9
9
9
Possibilità di cablaggio
①
②
③
④
Cablaggio tramite l'alimentatore interno
Ingresso digitale = HIGH, se l'interruttore è chiuso
Cablaggio tramite un alimentatore esterno
Ingresso digitale = HIGH, se l'interruttore è chiuso
Cablaggio tramite l'alimentatore interno
Ingresso digitale = LOW, se l'interruttore è chiuso
Cablaggio tramite un alimentatore esterno
Ingresso digitale = LOW, se l'interruttore è chiuso
Sezione del cavo consentita:
0,5 mm² … 1,5 mm²
Sezione del cavo consigliata:
1 mm²
Installazione con conformità EMC
● Per il collegamento della morsettiera ad altri componenti utilizzare cavi schermati.
● Per il collegamento del conduttore schermato utilizzare un morsetto. Collegare la
schermatura con la piastra di montaggio o con la piastra di schermatura utilizzando un
buon collegamento elettrico e la superficie più grande possibile. L'impiego dei cavi
schermati è descritto nel capitolo Collegamenti di potenza (Pagina 11).
Convertitore di frequenza
Getting Started, 01/2011, FW 4.4, A5E02999802A AC
15
Installazione
3.5 Configurazione I/O definita
3.5
Configurazione I/O definita
Sul convertitore di frequenza sono disponibili diverse impostazioni definite per le interfacce.
Selezionare l'impostazione (macro) adatta e cablare le morsettiere in modo corrispondente
all'impostazione scelta.
Se nessuna delle impostazioni definite è interamente adatta all'applicazione, eseguire le
seguenti operazioni:
1. Cablare le morsettiere in modo corrispondente all'applicazione.
2. Selezionare l'impostazione (macro) più adatta per l'applicazione.
3. Impostare la marco desiderata durante la messa in servizio di base.
4. Modificare la funzione dei morsetti non adatti.
Velocità fisse
0DFUR
'XHYHORFLW¢ILVVH
S 9HORFLW¢ILVVD
S 9HORFLW¢ILVVD
',bH',b +,*+
LOFRQYHUWLWRUHVRPPDYHORFLW¢ILVVDYHORFLW¢
ILVVD
0DFUR
'XHYHORFLW¢ILVVHFRQIXQ]LRQHGL
VLFXUH]]D672
S 9HORFLW¢ILVVD
S 9HORFLW¢ILVVD
',bH',b +,*+
,OPRWRUHIXQ]LRQDFRQYHORFLW¢ILVVDYHORFLW¢
ILVVD
',
',
',
',
',
',
$,
',
',
',
',
',
',
212))DGHVWUD
212))DVLQLVWUD
7DFLWD]LRQH
9HORFLW¢ILVVD
9HORFLW¢ILVVD
(UURUH '2
$OODUPH '2
1XPHURGLJLUL $2
99 212))YHORFLW¢ILVVD
9HORFLW¢ILVVD
7DFLWD]LRQH
5LVHUYDWRSHU672
$, (UURUH '2
$OODUPH '2
1XPHURGLJLUL $2
99 È necessario abilitare la funzione STO; vedere il capitolo: Abilitazione di "Safe Torque Off"
(Pagina 26).
0DFUR
4XDWWURYHORFLW¢ILVVH
S 9HORFLW¢ILVVD
S 9HORFLW¢ILVVD
S 9HORFLW¢ILVVD
S 9HORFLW¢ILVVD
'LYHUVL', +,*+
LOFRQYHUWLWRUHHVHJXHODVRPPDLQIXQ]LRQHGHOOH
YHORFLW¢ILVVH
',
',
',
',
',
',
212))YHORFLW¢ILVVD
9HORFLW¢ILVVD
7DFLWD]LRQH
9HORFLW¢ILVVD
9HORFLW¢ILVVD
$, (UURUH '2
$OODUPH '2
1XPHURGLJLUL $2
99 Convertitore di frequenza
16
Getting Started, 01/2011, FW 4.4, A5E02999802A AC
Installazione
3.5 Configurazione I/O definita
0DFUR
%XVGLFDPSR352),%86'3
',
',
',
',
',
',
$,
(UURUH '2
$OODUPH '2
7DFLWD]LRQH
1XPHURGLJLUL $2
99 352),%86'3
7HOHJUDPPD
Per informazioni su come ottenere il file GSD, vedere il capitolo: Acquisizione del file GSD
(Pagina 26).
0DFUR
%XVGLFDPSR352),%86'3
FRQIXQ]LRQHGLVLFXUH]]D672
',
',
',
',
',
',
$,
(UURUH '2
$OODUPH '2
7DFLWD]LRQH
5LVHUYDWRSHU672
1XPHURGLJLUL $2
99 352),%86'3
7HOHJUDPPD
È necessario abilitare la funzione STO; vedere il capitolo: Abilitazione di "Safe Torque Off"
(Pagina 26). Per informazioni su come ottenere il file GSD, vedere il capitolo: Acquisizione
del file GSD (Pagina 26).
Commutazione automatico/manuale del bus di campo in Jog
Impostazione di fabbrica nel G120C DP:
0DFUR
', /2:
%XVGLFDPSR352),%86'3
',
',
',
',
',
',
$,
7DFLWD]LRQH
/2:
(UURUH '2
$OODUPH '2
1XPHURGLJLUL $2
99 352),%86'3
7HOHJUDPPD
', +,*+
-2*WUDPLWH',H',
',
',
',
',
',
',
$,
1XPHURGLJLUL-2*
1XPHURGLJLUL-2*
7DFLWD]LRQH
+,*+
(UURUH '2
$OODUPH '2
1XPHURGLJLUL $2
99 S 1XPHURGLJLUL-2*
S 1XPHURGLJLUL-2*
Per informazioni su come ottenere il file GSD, vedere il capitolo: Acquisizione del file GSD
(Pagina 26).
Potenziometro motore
0DFUR
3RWHQ]LRPHWURPRWRUH023
FRQIXQ]LRQHGLVLFXUH]]D672
',
',
',
',
',
',
$,
212))
023SL»DOWR
023SL»EDVVR
7DFLWD]LRQH
5LVHUYDWRSHU672
(UURUH '2
$OODUPH '2
1XPHURGLJLUL $2
99 È necessario abilitare la funzione STO; vedere il capitolo: Abilitazione di "Safe Torque Off"
(Pagina 26).
Convertitore di frequenza
Getting Started, 01/2011, FW 4.4, A5E02999802A AC
17
Installazione
3.5 Configurazione I/O definita
0DFUR
3RWHQ]LRPHWURPRWRUH023
',
',
',
',
',
',
212))
023SL»DOWR
023SL»EDVVR
7DFLWD]LRQH
$,
(UURUH '2
$OODUPH '2
1XPHURGLJLUL $2
99 Valore di riferimento analogico
0DFUR
)XQ]LRQHGLVLFXUH]]D672
',
',
',
',
',
',
212))
$QQXOOD
7DFLWD]LRQH
5LVHUYDWRSHU672
9DORUHGLULIHULPHQWR
,
8 99
$,
(UURUH '2
$OODUPH '2
1XPHURGLJLUL $2
99 È necessario abilitare la funzione STO; vedere il capitolo Abilitazione di "Safe Torque Off"
(Pagina 26).
Industria di processo
0DFUR
', /2:
%XVGLFDPSR352),%86'3
',
',
',
',
',
',
$,
$QRPDOLDHVWHUQD
7DFLWD]LRQH
/2:
(UURUH '2
$OODUPH '2
1XPHURGLJLUL $2
99 352),%86'3
7HOHJUDPPD
', +,*+
3RWHQ]LRPHWURPRWRUH023
',
',
',
',
',
',
$,
212))
$QRPDOLDHVWHUQD
7DFLWD]LRQH
+,*+
023SL»DOWR
023SL»EDVVR
(UURUH '2
$OODUPH '2
1XPHURGLJLUL $2
99 Per informazioni su come ottenere il file GSD, vedere il capitolo: Acquisizione del file GSD
(Pagina 26).
0DFUR
', /2:
9DORUHGLULIHULPHQWRDQDORJLFR
',
',
',
',
',
',
$,
212))
$QRPDOLDHVWHUQD
7DFLWD]LRQH
/2:
9DORUHGLULIHULPHQWR
,
8 99
(UURUH '2
$OODUPH '2
1XPHURGLJLUL $2
99 ', +,*+
3RWHQ]LRPHWURPRWRUH023
',
',
',
',
',
',
$,
212))
$QRPDOLDHVWHUQD
7DFLWD]LRQH
+,*+
023SL»DOWR
023SL»EDVVR
(UURUH '2
$OODUPH '2
1XPHURGLJLUL $2
99 Convertitore di frequenza
18
Getting Started, 01/2011, FW 4.4, A5E02999802A AC
Installazione
3.5 Configurazione I/O definita
Controllo a due o tre fili
La macro 12 è un'impostazione di fabbrica per G120C USS/MB e G120C CAN.
0DFUR
&RQWUROORDGXHILOL
0RGR
RSHUDWLYR
&RPDQGRGLFRQWUROOR 212))
&RPDQGRGLFRQWUROOR $QQXOOD
212))DGHVWUD 212))DGHVWUD
212))DVLQLVWUD 212))DVLQLVWUD 0DFUR
0RGR
RSHUDWLYR
0DFUR
0RGR
RSHUDWLYR
',
',
',
',
',
',
9DORUHGLULIHULPHQWR
,
8 99
$,
0DFUR
0DFUR
&RQWUROORDWUHILOL
0RGRRSHUDWLYR 0RGRRSHUDWLYR
&RPDQGRGLFRQWUROOR
&RPDQGRGLFRQWUROOR
&RPDQGRGLFRQWUROOR
$ELOLWD]LRQH2))
21DGHVWUD
21DVLQLVWUD
$ELOLWD]LRQH2))
21
$QQXOOD
',
',
',
',
',
',
$,
(UURUH '2
$OODUPH '2
&RPDQGRGLFRQWUROOR
&RPDQGRGLFRQWUROOR
7DFLWD]LRQH
1XPHURGLJLUL $2
99 &RPDQGRGLFRQWUROOR
&RPDQGRGLFRQWUROOR
&RPDQGRGLFRQWUROOR
7DFLWD]LRQH
9DORUHGLULIHULPHQWR
,
8 99
(UURUH '2
$OODUPH '2
1XPHURGLJLUL $2
99 Comunicazione con il controllore sovraordinato via USS
0DFUR
%XVGLFDPSR866
S %DXGUDWH
S 1XPHUR3='
S 1XPHUR3.:
',
',
',
',
',
',
$,
(UURUH '2
$OODUPH '2
7DFLWD]LRQH
1XPHURGLJLUL $2
99 866
EDXG
3='3.:YDULDELOH
Ulteriori informazioni su USS si trovano nelle "Istruzioni operative" del convertitore di
frequenza.
Comunicazione con il controllore sovraordinato via CANopen
0DFUR
%XVGLFDPSR&$1RSHQ
S %DXGUDWH
',
',
',
',
',
',
$,
(UURUH '2
$OODUPH '2
7DFLWD]LRQH
1XPHURGLJLUL $2
99 &$1RSHQ
N%DXG
Ulteriori informazioni su CANopen si trovano nelle "Istruzioni operative" del convertitore di
frequenza.
Convertitore di frequenza
Getting Started, 01/2011, FW 4.4, A5E02999802A AC
19
Installazione
3.5 Configurazione I/O definita
Convertitore di frequenza
20
Getting Started, 01/2011, FW 4.4, A5E02999802A AC
4
Messa in servizio
Messa in servizio con uno IOP
La messa in servizio con uno IOP può avvenire in modo intuitivo con l'ausilio degli assistenti
di messa in servizio e dei testi di guida sull'IOP. Ulteriori informazioni sono disponibili nelle
istruzioni operative dell'IOP.
Messa in servizio con STARTER
Le operazioni più importanti:
● Collegare il PC tramite USB al convertitore ed avviare STARTER.
● Selezionare l'assistente di progetto (menu "Progetto / Nuovo con wizard")
– Selezionare il wizard di progetto "Ricerca apparecchi di azionamento online"
– Selezionare USB come interfaccia (punto di accesso per l'applicazione: "DEVICE …",
parametrizzazione delle interfacce utilizzata: "S7USB")
– Terminare il wizard di progetto.
● STARTER ha ora creato il progetto ed ha aggiunto un nuovo azionamento
● Selezionare l'azionamento nel progetto ed andare online
● Aprire nell'azionamento la maschera "Configurazione" (doppio clic)
● Avviare la messa in servizio di base con il pulsante "Wizard".
Ulteriori informazioni sono disponibili nelle istruzioni operative del convertitore.
Messa in servizio con il BOP-2
Rimuovere la copertura cieca ed innestare il BOP-2 sul convertitore di frequenza:
,QVHULPHQWRGHO%23
5LPR]LRQHGHO%23
Convertitore di frequenza
Getting Started, 01/2011, FW 4.4, A5E02999802A AC
21
Messa in servizio
4.1 Struttura del menu del BOP-2
0RWRUHªDFFHVR
&RPDQGRGD%23
DWWLYR
/LYHOOLGLPHQX
9DORUHGLULIHULPHQWRR
YDORUHDWWXDOHQXPHUR
RYDORUHSDUDPHWUR
(UURUHRDYYLVRDWWLYR
-RJDWWLYR
6FHOWDGHOPHQX
QXPHURHYDORUHGHO
SDUDPHWUR
,QVHU]LRQHGLVLQVHU]LRQ
HGHOPRWRUH
Figura 4-1
4.1
Elementi di servizio e visualizzazione del BOP-2
Struttura del menu del BOP-2
021,725
OK
ESC
&21752/
OK
ESC
',$*126
OK
ESC
63 6(732,17
$&.1$//
92/7287
-2*
)$8/76
'&/1.9
5(9(56(
+,6725<
&855287
3$5$06
OK
ESC
6(783
OK
ESC
67$1'$5'
),/7(5
ESC
72%23
)520%23
ESC
OK
'595(6(7
(;3(57
),/7(5
OK
(;75$6
67$786
72&5'
)520&5'
Modifica dei valori dei parametri:
①
②
Numero di parametro liberamente selezionabile
Messa in servizio di base
Convertitore di frequenza
22
Getting Started, 01/2011, FW 4.4, A5E02999802A AC
Messa in servizio
4.2 Messa in servizio di base
4.2
Messa in servizio di base
Menu
Osservazioni
6(783
ESC
Impostare tutti i parametri per il menu "SETUP".
Selezionare in BOP-2 il menu "SETUP".
OK
5(6(7
OK
&75/02'
OK
S
(8586$
S
Selezionare il tipo di regolazione del motore: I principali tipi di regolazione sono:
OK
02792/7
OK
027&855
OK
02732:
OK
027530
OK
027,'
OK
S
S
S
S
S
OK
0,1530
OK
5$0383
OK
5$03':1
OK
S
S
S
),1,6+
VF LIN
Controllo U/f con curva caratteristica lineare
VF QUAD
Controllo U/f con curva caratteristica quadratica
SPD N EN
Regolazione del numero di giri (regolazione vettoriale)
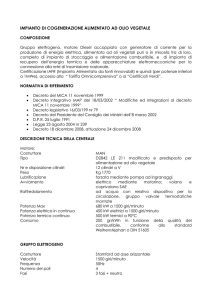
② Norma: IEC o NEMA
D-91056 Erlangen
3~Mot. 1LE10011AC434AA0
E0807/0496382_02 003
IEC/EN 60034 100L IMB3
IP55
25 kg Th.Cl. 155(F) -20°C Tamb 40°C
UNIREX-N3
Bearing
DE 6206-2ZC3 15g Intervall: 4000hrs
NE 6206-2ZC3 11g
SF 1.15 CONT NEMA MG1-12 TEFC Design A 2.0 HP
60Hz:
Hz
A
kW PF NOM.EFF rpm
V
A
CL
V
50 3.5
1.5
0.73 84.5%
400
970 380 - 420 3.55-3.55
0.73 84.5%
970 660 - 725 2.05-2.05
690 Y 50 2.05 1.5
60 3.15 1.5
0.69 86.5% 1175
K
460
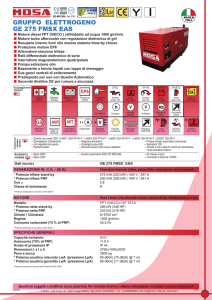
① Tensione
③ Corrente
④ Potenza norma IEC (kW)
⑤ Potenza norma NEMA (HP)
⑥ Numero di giri nominale
Dati del motore sulla targhetta identificativa
Si consiglia l'impostazione STIL ROT (rilevamento dei dati motore in stato di fermo e con il
motore in rotazione).
Se non è possibile far girare il motore a vuoto, ad es. quando il movimento è limitato
meccanicamente, selezionare l'impostazione STILL (rilevamento dati motore in stato di fermo).
0$&3$5
S
Selezionare "Reset" se si desidera ripristinare tutti i parametri alle impostazioni di fabbrica
prima della messa in servizio di base: NO → YES → OK
Selezionare la configurazione per gli ingressi e le uscite e il corretto bus di campo per
l'applicazione. Le configurazioni definite sono riportate nel capitolo Configurazione I/O definita
(Pagina 16).
Numero di giri minimo del motore
Tempo di accelerazione del motore
Tempo di decelerazione del motore
OK
Confermare la conclusione della messa in servizio di base (parametro p3900):
NO → YES → OKNO → YES → OK
Convertitore di frequenza
Getting Started, 01/2011, FW 4.4, A5E02999802A AC
23
Messa in servizio
4.3 Libera selezione e modifica dei parametri
Rilevamento dati motore
Se durante la messa in servizio di base si sceglie MOT ID (p1900) , alla conclusione della
messa in servizio di base viene emesso l'allarme A07991. Se il convertitore di frequenza
deve rilevare i dati del motore collegato, il motore deve essere attivato (ad es. tramite il
BOP-2). Dopo la conclusione del rilevamento dei dati motore, il motore viene disattivato dal
convertitore di frequenza.
CAUTELA
Rilevamento dei dai motore per carichi pericolosi
Prima di avviare il rilevamento dei dati motore occorre proteggere le parti pericolose
dell'impianto, ad es. bloccando l'accesso ai punti pericolosi o abbassando a terra un carico
sospeso.
4.3
Libera selezione e modifica dei parametri
Con il BOP-2 si modificano le impostazioni del convertitore selezionando il numero di
parametro desiderato e cambiandone il valore. È possibile modificare i valori dei parametri
nei menu "PARAMS" e "SETUP"
OK
ESC OK
>2 sec
OK
OK
OK
OK
ESC
ESC
ESC
ESC
OK
OK
ESC OK
>2 sec
OK
OK
OK
ESC
ESC
ESC
OK
Selezione di un numero di parametro
Modifica di un valore di parametro
Quando il numero di parametro lampeggia sul
display, è possibile modificarne il numero in due
modi:
Quando il valore del parametro lampeggia sul
display, si hanno due possibilità per modificarlo:
Prima possibilità:
Seconda possibilità:
Prima possibilità:
Seconda possibilità:
Aumentare o ridurre il
numero di parametro
con i tasti freccia finché
non viene visualizzato il
numero desiderato.
Premere il tasto OK per
più di due secondi e
modificare il numero di
parametro desiderato
una cifra alla volta:
Aumentare o ridurre il
valore del parametro
con i tasti freccia finché
non viene visualizzato il
valore desiderato.
Premere il tasto OK per
più di due secondi e
immettere il valore
desiderato una cifra alla
volta.
Premere OK per confermare il numero di
parametro.
Premere OK per confermare il valore del
parametro.
Tutte le modifiche effettuate con il BOP-2 vengono salvate immediatamente dal convertitore
in modo protetto contro le interruzioni di rete.
Convertitore di frequenza
24
Getting Started, 01/2011, FW 4.4, A5E02999802A AC
Messa in servizio
4.4 Modifica della funzione di un morsetto
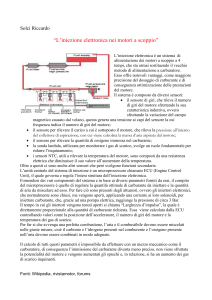
4.4
Modifica della funzione di un morsetto
Morsetti
Ingressi
digitali
',
r0722.0
',
r0722.1
',
r0722.2
',
r0722.3
',
r0722.4
',
r0722.5
BI: pxxxx
Modifica della funzione
Esempi
1. Selezionare la funzione
desiderata contrassegnata da
un parametro "BI".
Funzione: Inserzione del motore
tramite DI 2.
Impostazione: p0840 = 722.2
2. Impostare questo parametro al
p0840
valore del parametro di stato
',
r0722.2
722.2 212))
r0722.x dell'ingresso digitale
Funzione: Tacitazione dell'errore
desiderato.
tramite DI 1.
Impostazione: p3981 = 722.1
',
Uscite
digitali
BO: ryyxx.n
p0730
'2
p0731
'2
1. Selezionare la funzione
desiderata contrassegnata da
un parametro "BO".
p2103
722.1
r0722.1
Funzione: Segnale "Errore" su DO 1.
Impostazione: p0731 = 52.3
2. Impostare il parametro p073x
dell'uscita digitale desiderata
al valore del parametro "BO".
r0052.3
p0731
52.3
'2
Ingresso -10 V ... 10 V
analogico 0 V ... 10 V
,
8
-20 mA ... 20 mA
,
0 mA ... 20 mA
8
r0755
$,
p0756[0]
CI: pyyyy
1. Selezionare la funzione
desiderata contrassegnata da
un parametro "CI".
Funzione: AI 0 predispone il valore di
riferimento per il regolatore PID.
Impostazione: p2253 = 55[0]
2. Impostare questo parametro al
valore del parametro di stato
r0755.x dell'ingresso
analogico.
$,
r0755
p2253
755.0
Utilizzare il parametro p0756[0] e l'interruttore I/U sul lato anteriore del
convertitore di frequenza per configurare l'ingresso analogico come
ingresso di tensione o corrente.
Uscita
analogica
p0776[0]
CO: rxxyy
0 V ... 10 V 1. Selezionare la funzione
desiderata contrassegnata da
0 mA ... 20 mA
un parametro "CO".
p0771
$2
Funzione: Segnale "Corrente" su
AO 0.
Impostazione: p0771 = 27
2. Impostare il parametro p0771
dell'uscita analogica sul valore |i|
del parametro "CO".
r0027
p0771
27
$2
Utilizzare il parametro p0776[0] per configurare l'ingresso analogico come
ingresso di tensione o corrente.
Convertitore di frequenza
Getting Started, 01/2011, FW 4.4, A5E02999802A AC
25
Messa in servizio
4.5 Abilitazione di "Safe Torque Off"
4.5
Abilitazione di "Safe Torque Off"
Morsetti
Impostare i seguenti parametri per abilitare la funzione STO:
Ingresso
digitale failsafe
p9761 = …
Immettere la password per la funzione fail-safe (impostazione di
fabbrica = 0)
p9762 = …
Immettere una nuova password se necessario (0 … FFFF
FFFF)
p9763 = …
Confermare la nuova password
4.6
',
',
672
p0010 = 95
Mettere in servizio le funzioni fail-safe
p9601 = 1
STO viene selezionato tramite la morsettiera
p9659 = …
Impostare il timer per la dinamizzazione forzata (8 ore
… 1 anno).
Per soddisfare i requisiti delle norme EN 954-1, ISO 13849-1 e
IEC 61508 relativamente al riconoscimento tempestivo degli
errori, il convertitore deve verificare con regolarità i propri circuiti
rilevanti per la sicurezza al fine di garantire che questi funzionino
correttamente.
p9700 = 208
Copiare i parametri fail-safe
p9701 = 220
Confermare i parametri fail-safe
p0010 = 0
Terminare la messa in servizio delle funzioni fail-safe
Acquisizione del file GSD
Il GSD è un file di descrizione per uno slave PROFIBUS. Esistono due possibilità per
ottenere il file GSD del convertitore:
1. È possibile reperire il GSD del convertitore SINAMICS in Internet
(http://support.automation.siemens.com/WW/view/it/22339653/133100).
2. Il GSD è memorizzato nel convertitore. Il convertitore scrive il proprio GSD sulla scheda
di memoria quanto questa viene inserita nel convertitore e il p0804 viene impostato su
12. Con la scheda di memoria si può quindi trasferire il GSD al dispositivo di
programmazione o al PC.
Convertitore di frequenza
26
Getting Started, 01/2011, FW 4.4, A5E02999802A AC
Lista parametri
5
N. par.
r0051
r0052
La seguente lista contiene le informazioni di base dei
parametri con livello di accesso 1 … 3. Una lista
parametri completa si trova nel manuale delle liste,
vedere Ulteriori informazioni (Pagina 46).
N. par.
Nota
&RPDQGRHYLVXDOL]]D]LRQH
r0002
p0003
p0010
p0015
r0018
r0020
r0021
r0022
r0024
r0025
r0026
r0027
r0031
r0032
r0034
r0035
r0036
r0039
p0040
r0041
p0045
r0046
r0047
r0050
Segnalazione di funzionamento azionamento
Livello di accesso
Azionamento, messa in servizio, filtro parametri
Macro Apparecchio di azionamento
Vedere anche Configurazione I/O definita
(Pagina 16)
Versione del firmware della Control Unit
Valore di riferimento del numero di giri livellato
[100 % ≙ p2000]
CO: Valore attuale del numero di giri livellato
[100 % ≙ p2000]
Valore attuale numero di giri/min livellato [giri/min]
Frequenza di uscita livellata [100 % ≙ p2000]
CO: Tensione di uscita livellata [100 % ≙ p2001]
CO: Tensione del circuito intermedio livellata
[100 % ≙ p2001]
CO: Valore attuale di corrente, valore livellato
[100 % ≙ p2002]
Valore attuale della coppia livellato
[100 % ≙ p2003]
CO: Valore attuale della potenza attiva livellato
[100 % ≙ r2004]
Carico del motore [1 ≙ 100 %]
CO: Temperatura del motore [100 °C ≙ 100 %]
CO: Parte di potenza sovraccarico I2t [1 ≙ 100 %]
Consumo di energia
1 Ripristino della visualizzazione del consumo
di energia
Ripristino della visualizzazione del consumo di
energia
Consumo di energia risparmiato
Valore di visualizzazione della costante del tempo
di livellamento [ms]
CO/BO: Abilitazioni mancanti
Identificazione dati motore e ottimizzazione
regolatore del numero di giri
CO/BO: Set di dati di comando CDS attivo
r0053
r0054
r0055
Nota
CO/BO: Set di dati dell'azionamento DDS attivo
CO/BO: Parola di stato 1
.00
Pronto all'inserzione
.01
Pronto al funzionamento
.02
Funzionamento abilitato
.03
Anomalia attiva
.04
Arresto per inerzia attivo (OFF2)
.05
Arresto rapido attivo (OFF3)
.06
Blocco inserzione attivo
.07
Avviso attivo
.08
Scostamento numero di giri di
riferimento/attuale
.09
Controllo richiesto
.10
Numero di giri massimo raggiunto
.11
Limite I,M,P raggiunto
.12
Freno di stazionamento motore aperto
.13
Avviso di surriscaldamento motore
.14
Il motore gira in avanti
.15
Avviso di sovraccarico convertitore
CO/BO: Parola di stato 2
CO/BO: Parola di comando 1
.00
ON/OFF1
.01
OFF2
.02
OFF3
.03
Abilitazione del generatore di rampa
.04
Abilitazione del generatore di rampa
.05
Continuare generatore di rampa
.06
Abilitazione valore di riferimento del
numero di giri
.07
Tacitazione anomalia
.08
Funzionamento a impulsi bit 0
.09
Funzionamento a impulsi bit 1
.10
Controllo da parte del PLC
.11
Inversione di direzione (valore di
riferimento)
.13
Potenziometro motore più alto
.14
Potenziometro motore più basso
.15
CDS bit 0
CO/BO: Parola di comando aggiuntiva
.00
Valore di riferimento fisso bit 0
.01
Valore di riferimento fisso bit 1
.02
Valore di riferimento fisso bit 2
.03
Valore di riferimento fisso bit 3
.04
Selezione DDS bit 0
.05
Selezione DDS bit 1
.08
Regolatore PID, abilitazione
.09
Abilitazione frenatura in corrente continua
.11
Abilitazione statismo
Convertitore di frequenza
Getting Started, 01/2011, FW 4.4, A5E02999802A AC
27
Lista parametri
N. par.
r0056
r0060
r0062
r0063
r0064
r0065
r0066
r0067
r0068
r0070
r0071
r0072
r0075
r0076
r0077
r0078
r0079
Nota
.12
Regolazione coppia attiva
.13
Anomalia esterna 1 (F07860)
.15
CDS bit 1
CO/BO: Parola di stato regolazione
CO: Valore di riferimento del numero di giri prima
del filtro del valore di riferimento [100 % ≙ p2000]
CO: Valore di riferimento del numero di giri dopo
il filtro [100 % ≙ p2000]
CO: Valore attuale del numero di giri, non livellato
[100 % ≙ p2000]
CO: Differenza di regolazione regolatore del
numero di giri [100 % ≙ p2000]
Frequenza di scorrimento [100 % ≙ p2000]
CO: Frequenza di uscita [100 % ≙ p2000]
CO: Corrente di uscita massima [100 % ≙ p2002]
CO: Valore attuale della corrente, valore non
livellato [100 % ≙ p2002]
CO: Tensione del circuito intermedio valore
attuale [100 % ≙ p2001]
Tensione di uscita massima [100 % ≙ p2001]
CO: Tensione di uscita [100 % ≙ p2001]
CO: Valore di riferimento corrente formante il
campo [100 % ≙ p2002]
CO: Valore attuale di corrente formante il campo
[100 % ≙ p2002]
CO: Valore di riferimento di corrente formante la
coppia [100 % ≙ p2002]
CO: Valore attuale di corrente formante la coppia
[100 % ≙ p2002]
CO: Valore di riferimento della coppia totale
[100 % ≙ p2003]
N. par.
r0209
p0210
p0230
p0233
p0234
r0238
p0278
p0287
r0289
p0290
p0292
p0295
0RWRUH
p0300
0HVVDLQVHUYL]LR
p0100
p0170
p0180
Norma motori IEC/NEMA
0 Motore IEC (50 Hz, unità SI)
1 Motore NEMA (60 Hz, unità US)
2 Motore NEMA (60 Hz, unità SI)
Quantità di set di dati di comando (CDS)
Quantità di set di dati dell'azionamento (DDS)
3RZHU0RGXOH
p0201
r0204
p0205
r0206
r0207
r0208
Codice numerico parte di potenza
Caratteristiche hardware della parte di potenza
Applicazione parte di potenza
0 Ciclo di carico con sovraccarico elevato
1 Ciclo di carico con sovraccarico ridotto
Parte di potenza, potenza nominale [kw/hp]
Parte di potenza, corrente nominale
Parte di potenza, tensione nominale di rete [V]
Nota
Parte di potenza, corrente massima
Tensione di collegamento dell'apparecchiatura [V]
Azionamento, tipo di filtro lato motore
0 Nessun filtro
1 Bobina motore
2 Filtro du/dt
3 Filtro sinusoidale Siemens
4 Filtro sinusoidale di produttori terzi
Parte di potenza bobina motore [mH]
Parte di potenza, capacità filtro sinusoidale [µF]
Parte di potenza resistenza interna
Tensione del circuito intermedio riduzione della
soglia di sottotensione [V]
Sorveglianza di guasto verso terra, soglie
[100 % ≙ r0209]
CO: Parte di potenza, corrente di uscita massima
[100 % ≙ p2002]
Parte di potenza, reazione al sovraccarico
0 Riduzione corrente di uscita o frequenza di
uscita
1 Nessuna riduzione, disinserzione al
raggiungimento della soglia di sovraccarico
2 Riduzione I_uscita o f_uscita e f_impulso (non
tramite I2t)
3 Riduzione frequenza impulsi (non tramite I2t)
Parte di potenza soglia di avviso temperatura [°C]
Tempo di arresto ventilatore [s]
p0301
p0304
p0305
p0306
p0307
p0308
p0309
p0310
p0311
p0320
p0322
p0323
r0330
Selezione del tipo di motore
0 Nessun motore
1 Motore asincrono
2 Motore sincrono
17 Motore asincrono standard 1LA7
Selezione codice numerico motore
Tensione nominale del motore [V]
Corrente nominale del motore [A]
Numero motori collegati in parallelo
Potenza nominale del motore [kW]
Fattore di potenza nominale del motore
Rendimento nominale del motore [%]
Frequenza nominale del motore [Hz]
Numero di giri nominale del motore [giri/min]
Corrente nominale di
magnetizzazione/cortocircuito del motore [A]
Numero di giri massimo del motore [giri/min]
Corrente massima del motore [A]
Scorrimento nominale del motore
Convertitore di frequenza
28
Getting Started, 01/2011, FW 4.4, A5E02999802A AC
Lista parametri
N. par.
r0331
p0335
p0340
p0341
p0342
r0345
p0346
p0347
p0350
p0352
r0395
r0396
Nota
Corrente di magnetizzazione/cortocircuito del
motore attuale
Tipo di raffreddamento motore
Calcolo automatico dei parametri di
motore/regolazione
Momento di inerzia del motore [kgm²]
Momento di inerzia, rapporto del totale rispetto al
motore [kgm²]
Tempo di avviamento nominale del motore
Tempo di eccitazione del motore [s]
Tempo di diseccitazione del motore [s]
Resistenza dello statore del motore a freddo [Ω]
Resistenza di potenza [Ω]
Resistenza statore attuale
Resistenza rotore attuale
7HFQRORJLDHXQLW¢
p0500
p0505
p0573
p0595
p0596
Applicazione tecnologica (Applicazione)
Selezione sistema di unità
1 Sistema di unità SI
2 Sistema di unità di riferimento/SI
3 Sistema di unità US
4 Sistema di unità di riferimento/US:
Blocco del calcolo automatico dei valori di
riferimento
Selezione unità tecnologica
1 %
2 Riferito a 1, adimensionale
3 bar
4 °C
5 Pa
6 ltr/s
7 m³/s
8 ltr/min
9 m³/min
10 ltr/h
11 m³/h
12 kg/s
13 kg/min
14 kg/h
15 t/min
16 t/h
17 N
18 kN
19 Nm
20 psi
21 °F
22 gallon/s
23 inch³/s
24 gallon/min
25 inch³/min 26 gallon/h
27 inch³/h
28 lb/s
29 lb/min
30 lb/h
31 lbf
32 lbf ft
33 K
34 giri/min
35 parts/min
36 m/s
37 ft³/s
38 ft³/min
39 BTU/min
40 BTU/h
41 mbar
42 inch wg
43 ft wg
44 m wg
45 % r.h.
46 g/kg
Grandezza di riferimento unità tecnologica
6RUYHJOLDQ]DWHUPLFDGHOPRWRUHHPRGHOORGHO
PRWRUHFRUUHQWHPDVVLPD
p0601
Sensore della temperatura motore, tipo di
sensore
0 Nessun sensore
N. par.
p0604
p0605
p0610
p0611
p0615
p0625
p0637
p0640
Nota
1 PTC, avviso e temporizzatore
2 KTY84
4 Avviso e temporizzatore contatto
normalmente chiuso bimetallico
Temperatura motore, soglia di avviso [°C]
Temperatura del motore, soglia di anomalia [°C]
Reazione sovratemperatura motore
0 Nessuna reazione, solo avviso, nessuna
riduzione di Imax
1 Avviso con riduzione di Imax e anomalia
2 Avviso e anomalia, senza riduzione di Imax
Modello motore I2t, costante di tempo termica [s]
Modello motore I2t, soglia di anomalia [°C]
Temperatura ambiente motore [°C]
Flusso trasversale, gradiente di flusso saturato
[mH]
Limite di corrente [A]
6RUJHQWLGLFRPDQGRHPRUVHWWLGHOOD&RQWURO8QLW
p0700
r0720
r0722
r0723
p0730
p0731
r0747
p0748
r0751
r0752
r0755
p0756
Selezione della sorgente di comando
Numero di ingressi e uscite della CU
CO/BO: Stato degli ingressi digitali della CU
.00
DI 0 (morsetto 5)
.01
DI 1 (morsetto 6)
.02
DI 2 (morsetto 7)
.03
DI 3 (morsetto 8)
.04
DI 4 (morsetto 16)
.05
DI 5 (morsetto 17)
.11
DI 11 (morsetti 3, 4) AI 0
CO/BO: CU Ingressi digitali, stato invertito
BI: CU Sorgente del segnale per morsetto DO 0
NO: Morsetto 19 / NC: Morsetto 18
BI: CU Sorgente del segnale per morsetto DO 1
NO: Morsetto 21
CU Stato delle uscite digitali
CU Invertire uscite digitali
BO: CU Ingressi analogici, parola di stato
CO: CU Ingressi analogici, tensione/corrente di
ingresso attuale, AI0 (morsetti 3/4)
CO: CU Ingressi analogici, valore attuale in
percentuale, AI0 (morsetti 3/4) [%]
CU Ingresso analogico, tipo (morsetti 3, 4)
0 Ingresso tensione unipolare (0 V ... +10 V)
1 Ingresso tensione unipolare sorvegliato (+2 V
... +10 V)
2 Ingresso di corrente unipolare (0 mA ...
+20 mA)
3 Ingresso di corrente unipolare sorvegliato (+4
mA ... +20 mA)
Convertitore di frequenza
Getting Started, 01/2011, FW 4.4, A5E02999802A AC
29
Lista parametri
N. par.
Nota
4 Ingresso tensione unipolare (-10 V ... +10 V)
8 Nessun sensore collegato
\ S
N. par.
p0782
r0785
p0795
p0796
[ S
9P$
[ S
p0797
p0798
&RPPXWD]LRQHHFRSLDGHLVHWGLGDWL
\ S
p0757
p0758
p0759
p0760
p0761
p0771
r0772
r0774
p0775
p0776
CU Ingresso analogico, curva caratteristica valore
x1
CU Ingresso analogico, curva caratteristica valore
y1 [%]
CU Ingresso analogico, curva caratteristica valore
x2
CU Ingresso analogico, curva caratteristica valore
y2 [%]
CU Ingresso analogico, sorveglianza rottura
conduttore, soglia di intervento
CI: CU Uscita analogica, sorgente del segnale,
AO 0 (morsetti 12, 13) [1 ≙ 100%]
CU Uscita analogica, valore di uscita riferito al
valore attuale
CU Uscita analogica, tensione/corrente di uscita
attuale [100% ≙ p2001]
CU Uscite analogiche, attivare formazione del
valore
CU Uscita analogica, tipo
0 Uscita di corrente (0 mA ... +20 mA)
1 Uscita di tensione (0 V ... +10 V)
2 Uscita di corrente (+4 mA ... +20 mA)
\ S
9P$
\ S
[ S
p0777
p0778
p0779
p0780
Nota
BI: CU Uscita analogica, sorgente del segnale per
inversione, AO 0 (morsetti 12,13)
BO: CU Uscita analogica, parola di stato
.00
1 = AO 0 negativo
CU Ingressi digitali, modalità di simulazione
CU Ingressi digitali, modalità di simulazione,
valore di riferimento
CU Ingressi analogici, modalità di simulazione
CU Ingressi analogici, modalità di simulazione,
valore di riferimento
p0802
p0803
p0804
p0806
r0807
p0809
p0810
r0835
r0836
&RPDQGRVHTXHQ]LDOHDGHV212))
p0840
p0844
p0845
p0848
p0849
[ S
CU Uscita analogica, curva caratteristica valore
x1 [%]
CU Uscita analogica, curva caratteristica valore
y1 [V]
CU Uscita analogica, curva caratteristica valore
x2 [%]
CU Uscita analogica, curva caratteristica valore
y2 [V]
Trasferimento dei dati, scheda di memoria come
sorgente/destinazione
Trasferimento dei dati, memoria dell'apparecchio
come sorgente/destinazione
Avvio del trasferimento dati
12 Avvio della trasmissione del file GSD per
master PROFIBUS sulla scheda di memoria
BI: Blocco priorità di comando
BO: Priorità di comando attiva
Copiare set di dati di comando CDS
BI: Selezione set di dati di comando CDS bit 0
CO/BO: Commutazione del set di dati, parola di
stato
CO/BO: Set di dati di comando CDS selezionato
p0852
p0854
p0855
p0856
p0858
r0898
r0899
BI: ON/OFF (OFF1)
BI: Nessun arresto per inerzia / arresto per inerzia
(OFF2) sorgente del segnale 1
BI: Nessun arresto per inerzia / arresto per inerzia
(OFF2) sorgente del segnale 2
BI: Nessun arresto rapido / arresto rapido (OFF3)
sorgente del segnale 1
BI: Nessun arresto rapido / arresto rapido (OFF3)
sorgente del segnale 1
BI: Abilitazione funzionamento
BI: Controllo da parte del PLC
BI: Aprire obbligatoriamente freno di
stazionamento
BI: Abilitare regolatore del numero di giri
BI: Chiudere obbligatoriamente freno di
stazionamento
CO/BO: Parola di comando, controllo sequenziale
CO/BO: Parola di stato, controllo sequenziale
352),%86352),GULYH
p0918
p0922
Indirizzo PROFIBUS
Selezione del telegramma PROFIdrive
Convertitore di frequenza
30
Getting Started, 01/2011, FW 4.4, A5E02999802A AC
Lista parametri
N. par.
Nota
1
20
352
353
354
999
Telegramma standard 1, PZD 2/2
Telegramma standard 20, PZD 2/6
Telegramma SIEMENS 352, PZD 6/6
Telegramma SIEMENS 353, PZD 2/2,
PKW 4/4
Telegramma SIEMENS 354, PZD 6/6,
PKW 4/4
Progettazione libera dei telegrammi con
BICO
$QRPDOLHSDUWH
r0944
r0945
r0946
r0947
r0948
r0949
p0952
r0963
p0965
p0969
CO: Contatore delle modifiche del buffer delle
anomalie
Codice di anomalia
Lista codici di anomalia
Numero di anomalia
Tempo in cui è avvenuta l'anomalia in millisecondi
[ms]
Valore anomalia
Contatore anomalie
Velocità di trasmissione PROFIBUS
Numero di profilo PROFIdrive
Tempo di esecuzione relativo del sistema [ms]
5LSULVWLQRGHOOHLPSRVWD]LRQLGLIDEEULFD
6DOYDWDJJLRSDUDPHWUL
p0970
p0971
p0972
Ripristino dei parametri dell'azionamento
0
Inattivo
1
Avvio ripristino parametri
5
Avvio ripristino parametri Safety
10
Avvio caricamento impostazione 10
11
Avvio caricamento impostazione 11
12
Avvio caricamento impostazione 12
100 Avvio ripristino delle interconnessioni BICO
Salvataggio parametri
0 Inattivo
1 Salvataggio oggetto di azionamento
10 Salvataggio in memoria non volatile come
impostazione 10
11 Salvataggio in memoria non volatile come
impostazione 11
12 Salvataggio in memoria non volatile come
impostazione 12
Reset apparecchio di azionamento
&DQDOHGHOYDORUHGLULIHULPHQWR
p1000
p1001
Selezione del valore di riferimento del numero di
giri
CO: Valore di riferimento fisso del numero di giri 1
[giri/min]
N. par.
p1002
p1003
p1004
p1005
p1006
p1007
p1008
p1009
p1010
p1011
p1012
p1013
p1014
p1015
p1016
p1020
p1021
p1022
p1023
r1024
r1025
p1030
Nota
CO: Valore di riferimento fisso del numero di giri 2
[giri/min]
CO: Valore di riferimento fisso del numero di giri 3
[giri/min]
CO: Valore di riferimento fisso del numero di giri 4
[giri/min]
CO: Valore di riferimento fisso del numero di giri 5
[giri/min]
CO: Valore di riferimento fisso del numero di giri 6
[giri/min]
CO: Valore di riferimento fisso del numero di giri 7
[giri/min]
CO: Valore di riferimento fisso del numero di giri 8
[giri/min]
CO: Valore di riferimento fisso del numero di giri 9
[giri/min]
CO: Valore di riferimento fisso del numero di
giri 10 [giri/min]
CO: Valore di riferimento fisso del numero di
giri 11 [giri/min]
CO: Valore di riferimento fisso del numero di
giri 12 [giri/min]
CO: Valore di riferimento fisso del numero di
giri 13 [giri/min]
CO: Valore di riferimento fisso del numero di
giri 14 [giri/min]
CO: Valore di riferimento fisso del numero di
giri 15 [giri/min]
Modalità valore di riferimento fisso del numero di
giri
1 Selezione diretta
2 Selezione con codifica binaria
BI: Valore di riferimento fisso del numero di giri selezione bit 0
BI: Valore di riferimento fisso del numero di giri selezione bit 1
BI: Valore di riferimento fisso del numero di giri selezione bit 2
BI: Valore di riferimento fisso del numero di giri selezione bit 3
CO: Valore di riferimento fisso del numero di giri
attivo [100 % ≙ p2000]
BO: Stato valore di riferimento fisso del numero di
giri
Potenziometro motore, configurazione
00 Salvataggio attivo
01 Funzionamento automatico generatore di
rampa attivo
02 Arrotondamento iniziale attivo
03 Salvataggio in NVRAM attivo
Convertitore di frequenza
Getting Started, 01/2011, FW 4.4, A5E02999802A AC
31
Lista parametri
N. par.
p1035
p1036
p1037
p1038
p1040
p1043
p1044
p1047
p1048
r1050
p1055
p1056
p1058
p1059
p1070
p1071
r1073
p1075
p1076
r1077
r1078
p1080
p1082
p1083
r1084
p1086
r1087
p1091
p1092
Nota
BI: Potenziometro motore, valore di riferimento
superiore
BI: Potenziometro motore, valore di riferimento
inferiore
Potenziometro motore numero di giri massimo
[giri/min]
Potenziometro motore numero di giri minimo
[giri/min]
Potenziometro motore valore iniziale [giri/min]
BI: Potenziometro motore, accettare valore di
impostazione
CI: Potenziometro motore, valore di impostazione
[100 % ≙ p2000]
Potenziometro motore, tempo di accelerazione [s]
Potenziometro motore, tempo di decelerazione [s]
CO: Potenziometro motore, valore di riferimento
dopo il generatore di rampa [100 % ≙ p2000]
BI: Funzionamento a impulsi bit 0
BI: Funzionamento a impulsi bit 1
Funzionamento a impulsi 1 valore di riferimento
del numero di giri [giri/min]
Funzionamento a impulsi 2 valore di riferimento
del numero di giri [giri/min]
CI: Valore di riferimento principale
[100 % ≙ p2000]
CI: Valore di riferimento principale, scalatura [1 ≙
100 %]
CO: Valore di riferimento principale attivo
[100 % ≙ p2000]
CI: Valore di riferimento aggiuntivo
[100 % ≙ p2000]
CI: Valore di riferimento aggiuntivo, scalatura [1 ≙
100 %]
CO: Valore di riferimento aggiuntivo attivo
[100 % ≙ p2000]
CO: Valore di riferimento totale attivo
[100 % ≙ p2000]
Numero di giri minimo [giri/min]
Numero di giri massimo [giri/min]
CO:Limite numero di giri senso di rotazione
positivo [giri/min]
CO: Limite numero di giri positivo attivo
[100 % ≙ p2000]
CO: Limite numero di giri senso di rotazione
negativo [giri/min]
CO: Limite numero di giri negativo attivo
[100 % ≙ p2000]
Numero di giri escludibile 1 [giri/min]
Numero di giri escludibile 2 [giri/min]
N. par.
p1101
p1110
p1111
p1113
r1114
r1119
Nota
Numero di giri escludibile, larghezza di banda
[giri/min]
BI: Blocco direzione negativa
BI: Blocco direzione positiva
BI: Inversione del valore di riferimento
CO: Valore di riferimento dopo limitazione di
direzione [100 % ≙ p2000]
CO: Generatore di rampa, valore di riferimento
all'ingresso [100 % ≙ p2000]
Q
QPD[
3
9DORUHGL
ULIHULPHQWR
3
p1120
p1121
p1130
p1131
p1134
p1135
p1136
p1137
p1140
p1141
p1142
r1149
r1170
r1198
3
W
Generatore di rampa, tempo di accelerazione [s]
Generatore di rampa, tempo di decelerazione [s]
Generatore di rampa, tempo di arrotondamento
iniziale [s]
Generatore di rampa, tempo di arrotondamento
finale [s]
Generatore di rampa, tipo di arrotondamento
0 Livellamento costante
1 Livellamento non costante
OFF3 tempo di decelerazione [s]
OFF3 tempo di arrotondamento iniziale [s]
OFF3 tempo di arrotondamento finale [s]
BI: Abilitazione del generatore di rampa
BI: Continuare generatore di rampa
BI: Abilitazione valore di riferimento del numero di
giri
CO: Generatore di rampa, accelerazione [100 %
≙ p2007]
CO: Regolatore del numero di giri, somma valore
di riferimento [100 % ≙ p2000]
CO/BO: Parola di comando canale del valore di
riferimento
)XQ]LRQLDGHVIUHQRGLVWD]LRQDPHQWRPRWRUH
p1200
p1201
Riavviamento al volo, modo operativo
0 Riavviamento al volo inattivo
1 Riavviamento al volo sempre attivo (avvio in
direzione val. rif.)
4 Riavviamento al volo sempre attivo (avvio
solo in dir. val.rif.)
BI: Sorgente segnale abilitazione riavviamento al
volo
Convertitore di frequenza
32
Getting Started, 01/2011, FW 4.4, A5E02999802A AC
Lista parametri
N. par.
p1202
p1203
p1206
p1210
p1211
p1212
p1213
p1215
p1216
p1217
p1230
p1231
p1232
p1233
p1234
r1239
p1240
Nota
Riavviamento al volo, corrente di ricerca [100 % ≙
r0331]
Riavviamento al volo, fattore velocità di ricerca [%]
Un valore maggiore prolunga il tempo di ricerca.
Impostazione del numero di anomalia senza
reinserzione automatica
Modalità reinserzione automatica
0 Blocco reinserzione automatica
1 Tacitazione di tutte le anomalie senza
reinserzione
4 Reinserzione dopo mancanza rete senza altri
tentativi di avviamento
6 Reinserzione dopo anomalia con ulteriori
tentativi di avviamento
14 Reinserzione dopo interruzione di rete dopo
tacitazione manuale
16 Reinserzione dopo anomalia dopo tacitazione
manuale
26 Tacitazione di tutte le anomalie e
reinserzione con comando ON
Reinserzione automatica, tentativi di avviamento
Reinserzione automatica, tempo di attesa
tentativo avviamento [s]
Riattivazione automatica, tempo di sorveglianza
[s]
Configurazione freno di stazionamento del motore
0 Nessun freno di stazionamento del motore
presente
3 Freno di stazionamento motore come controllo
sequenziale, collegamento tramite BICO
Freno di stazionamento del motore, tempo di
apertura [ms]
Freno di stazionamento del motore, tempo di
chiusura [ms]
BI: Attivazione frenatura in corrente continua
Configurazione frenatura in corrente continua
0 Nessuna funzione
4 Frenatura in corrente continua
14 Frenatura in corrente continua sotto il numero
di giri iniziale
Frenatura in corrente continua, corrente di
frenatura [A]
Frenatura in corrente continua, durata [s]
Frenatura in corrente continua, numero di giri
iniziale [giri/min]
CO/BO: Frenatura in corrente continua, parola di
stato
Configurazione del regolatore VDC o della
sorveglianza VDC (regolazione vettoriale)
0 Blocco del regolatore VDC
N. par.
r1242
p1243
p1245
r1246
p1247
p1249
p1254
p1255
p1256
p1257
p1280
r1282
p1283
p1285
r1286
p1287
p1294
Nota
1 Abilitazione del regolatore VDC_max
2 Abilitazione del regolatore VDC_min
(bufferizzazione cinetica)
3 Abilitazione del regolatore VDC_min e del
regolatore VDC_max
Regolatore VDC_max, livello d'inserzione [100 % ≙
p2001]
Regolatore VDC_max, fattore di dinamica [%]
Regolatore VDC_min, livello d'inserzione
(bufferizzazione cinetica) [%]
Regolatore VDC_min, livello d'inserzione
(bufferizzazione cinetica) [100 % ≙ p2001]
Regolatore VDC_min, fattore di dinamica
(bufferizzazione cinetica) [%]
Soglia del numero di giri del regolatore VDC_max
[giri/min]
Regolatore VDC_max, acquisizione automatica
livello ON
1 Rilevamento automatico abilitato
Soglia temporale del regolatore VDC_min [s]
Reazione del regolatore VDC_min (bufferizzazione
cinetica)
0 Supporto VDC fino a sottotensione, n<p1257
→ F07405
1 Supporto VDC fino a sottotensione, n<p1257
→ F07405, t>p1255 → F07406
Soglia del numero di giri del regolatore VDC_min
[giri/min]
Configurazione del regolatore VDC o della
sorveglianza VDC (U/f)
0 Blocco del regolatore VDC
1 Abilitazione del regolatore VDC_max
2 Abilitazione del regolatore VDC_min
(bufferizzazione cinetica)
3 Abilitazione del regolatore VDC_min e del
regolatore VDC_max
Regolatore VDC_max, livello d'inserzione (U/f)
[100 % ≙ p2001]
Regolatore VDC_max, fattore di dinamica (U/f) [%]
Regolatore VDC_min, livello d'inserzione
(bufferizzazione cinetica) (U/f) [%]
Regolatore VDC_min, livello d'inserzione
(bufferizzazione cinetica) (U/f) [100 % ≙ p2001]
Regolatore VDC_min, fattore di dinamica
(bufferizzazione cinetica) (U/f) [%]
Regolatore VDC_max, acquisizione automatica
livello ON (U/f)
1 Rilevamento automatico abilitato
Convertitore di frequenza
Getting Started, 01/2011, FW 4.4, A5E02999802A AC
33
Lista parametri
N. par.
Nota
N. par.
p1321
&RQWUROOR8I
p1300
Modo operativo di controllo/regolazione
0 Controllo U/f con caratteristica lineare
1 Controllo U/f con caratteristica lineare e FCC
2 Controllo U/f con caratteristica parabolica
3 Controllo U/f con caratteristica
parametrizzabile
4 Controllo U/f con caratteristica lineare ed ECO
5 Controllo U/f per azionamenti con frequenza
precisa (settore tessile)
6 Controllo U/f per azionamenti con frequenza
precisa e FCC
7 Controllo U/f con caratteristica parabolica e
ECO
19 Controllo U/f con valore di riferimento della
tensione indipendente
20 Regolazione del numero di giri (senza
encoder)
8
8Q
p1322
p1323
p1324
p1325
p1326
p1327
p1330
p1334
p1335
p1336
r1337
p1338
p1340
p1341
3
3
r1343
p1351
p1352
3
IQ
p1310
p1311
p1312
r1315
I
Aumento di tensione permanente
[100 % ≙ p0305]
Aumento di tensione all'accelerazione [%
Boost di tensione all'avviamento [%]
Aumento di tensione totale [100 % ≙ p2001]
5HJROD]LRQHYHWWRULDOH
r1438
p1452
8
p1470
U
p1472
S8
S8
p1475
S8
S8
U
r1482
S
S
I
I
I
S
S
S
I
I
+]
p1320
Controllo U/f, curva caratteristica programmabile,
frequenza 1 [Hf]
Nota
Controllo U/f, curva caratteristica programmabile,
tensione 1 [V]
Curva caratteristica frequenza 2 [Hz]
Curva caratteristica tensione 2 [V]
Curva caratteristica frequenza 3 [Hz]
Curva caratteristica tensione 3 [V]
Curva caratteristica frequenza 4 [Hz]
Curva caratteristica tensione 4 [V]
CI: Controllo U/f valore di riferimento di tensione
indipendente [100 % ≙ p2001]
Controllo U/f, frequenza iniziale compensazione
dello scorrimento [Hz]
Compensazione dello scorrimento, scalatura
[100 % ≙ r0330]
Compensazione dello scorrimento, valore limite
[100 % ≙ r0330]
CO: Compensazione dello scorrimento, valore
attuale [1 ≙ 100 %]
Funzionamento U/f, smorzamento della
risonanza, guadagno
Guadagno proporzionale regolatore di frequenza
Imax
Tempo dell'azione integratrice regolatore di
frequenza Imax [s]
CO: Frequenza di uscita regolatore I_max
[100 % ≙ p2000]
CO: Freno di stazionamento del motore,
frequenza iniziale [1 ≙ 100 %]
CI: Freno di stazionamento del motore, frequenza
iniziale [1 ≙ 100 %]
r1493
p1496
p1511
r1516
CO: Regolatore del numero di giri, valore di
riferimento del numero di giri [100 % ≙ p2000]
Regolatore del numero di giri, valore attuale del
numero di giri, tempo di livellamento (SLVC) [ms]
Regolatore del numero di giri, funzionamento
senza encoder, guadagno P
Regolatore del numero di giri, funzionamento
senza encoder, tempo dell'azione integratrice
[ms]
CI: Regolatore n. di giri, valore di impostazione
coppia per freno di stazionamento motore
[100 % ≙ p2003]
CO: Regolatore del numero di giri, uscita coppia I
[100 % ≙ p2003]
CO: Momento d'inerzia totale
Precomando di accelerazione, scalatura [%]
CI: Coppia aggiuntiva 1 [100 % ≙ p2003]
CO: Coppia aggiuntiva e coppia di accelerazione
[100 % ≙ p2003]
Convertitore di frequenza
34
Getting Started, 01/2011, FW 4.4, A5E02999802A AC
Lista parametri
N. par.
p1520
p1521
p1522
p1523
p1524
p1525
r1526
r1527
p1530
p1531
r1538
r1539
r1547
p1552
p1554
p1570
p1571
p1580
r1598
p1610
p1611
r1732
r1733
p1745
p1784
Nota
CO: Limite di coppia superiore [Nm]
CO: Limite di coppia inferiore [Nm]
CI: Limite di coppia superiore [100 % ≙ p2003]
CI: Limite di coppia inferiore [100 % ≙ p2003]
CO: Limite di coppia superiore/motorio, scalatura
[1 ≙ 100 %]
CO: Limite di coppia inferiore, scalatura [1 ≙
100 %]
CO: Limite di coppia superiore senza offset
[100 % ≙ p2003]
CO: Limite di coppia inferiore senza offset
[100 % ≙ p2003]
Limite di potenza motorio [kW]
Limite di potenza generatorio [kW]
CO: Limite di coppia superiore attivo
[100 % ≙ p2003]
CO: Limite di coppia inferiore attivo
[100 % ≙ p2003]
CO: Limite di coppia per uscita regolatore del
numero di giri
[0] Limite superiore [100 % ≙ p2003]
[1] Limite inferiore [100 % ≙ p2003]
CI: Limite di coppia superiore, scalatura senza
offset [1 ≙ 100 %]
CI: Limite di coppia inferiore, scalatura senza
offset [1 ≙ 100 %]
CO: Valore di riferimento del flusso [1 ≙ 100 %]
CI: Valore di riferimento del flusso aggiuntivo
[100 % ≙ p2003]
Ottimizzazione del rendimento [%]
CO: Valore di riferimento del flusso totale
[1 ≙ 100 %]
Valore di riferimento statico della coppia (SLVC)
[100 % ≙ r0333]
Coppia aggiuntiva di accelerazione (SLVC)
[100 % ≙ r0333]
CO: Valore di riferimento della tensione
longitudinale [100 % ≙ p2001]
CO: Valore di riferimento della tensione
trasversale [100 % ≙ p2001]
Modello motore, valore di soglia di errore,
riconoscimento dello stallo [%]
Retroazione modello motore, scalatura [%]
N. par.
,GHQWLILFD]LRQHPRWRUH
p1900
p1909
p1910
p1959
p1960
p1961
p1965
p1967
Valore di riferimento frequenza impulsi [kHz]
CO: Frequenza impulsi [100 % ≙ p2000]
Inversione della sequenza delle fasi di uscita
1 On
Identificazione dati del motore e misura in
rotazione
0 Bloccato
1 Identificazione dati motore da fermo e con
motore in rotazione
2 Identificazione dati motore da fermo
3 Identificazione dati motore con motore in
rotazione
Parola di comando identificazione dati motore
Selezione identificazione dati motore
Configurazione misura in rotazione
Selezione misura in rotazione
0 Bloccato
1 Misura in rotazione nel funzionamento senza
encoder
3 Ottimizzazione del regolatore del numero di
giri nel funzionamento senza encoder
Curva caratteristica di saturazione, numero di giri
per calcolo [%]
Numero di giri Ottim_regol_num_giri
[100 % ≙ p0310]
Fattore di dinamica Ottim_regol_num_giri [%]
9DORULGLULIHULPHQWR
p2000
p2001
p2002
p2003
r2004
p2006
p2010
p2011
p2016
Numero di giri di riferimento, frequenza di
riferimento [giri/min]
Tensione di riferimento [V]
Corrente di riferimento [A]
Coppia di riferimento [Nm]
Potenza di riferimento
Temperatura di riferimento [°C]
Velocità di trasmissione interfaccia MIS
Indirizzo interfaccia MIS
CI: Interfaccia MIS USS, parola di invio PZD
866R0RGEXV578
p2020
8QLW¢GLFRPDQGR
p1800
r1801
p1820
Nota
p2021
p2022
p2023
Velocità di trasmissione interfaccia del bus di
campo
4 2400 baud
5 4800 baud
6 9600 baud
7 19200 baud
8 38400 baud
9 57600 baud
10 76800 baud
11 93750 baud
12 115200 baud
13 187500 baud
Indirizzo interfaccia del bus di campo
Numero PZD USS per interfaccia del bus di
campo
Numero PKW USS per interfaccia del bus di
campo
Convertitore di frequenza
Getting Started, 01/2011, FW 4.4, A5E02999802A AC
35
Lista parametri
N. par.
p2024
r2029
p2030
r2032
p2037
p2038
p2040
Nota
0 PKW 0 parole
3
PKW 3 parole
4 PKW 4 parole
127 PKW variabile
Tempi interfaccia del bus di campo [ms]
[0] Tempo di elaborazione massimo
[1] Tempo di ritardo dei caratteri
[2] Tempo di pausa dei telegrammi
Statistica errori interfaccia del bus di campo
[0] Numero di telegrammi senza errori
[1] Numero di telegrammi rifiutati
[2] Numero di errori di framing
[3] Numero di errori di overrun
[4] Numero di errori di parity
[5] Numero di errori caratteri di avvio
[6] Numero di errori di checksum
[7] Numero di errori di lunghezza
Selezione protocollo interfaccia del bus di campo
0 Nessun protocollo
1 USS
2 MODBUS
3 PROFIBUS
4 CAN
Priorità di comando, parola di comando attiva
.00 ON / OFF1
.01 Nessun OFF2
.02 Nessun OFF3
.03 Abilitazione funzionamento
.04 Abilitazione del generatore di rampa
.05 Avvio del generatore di rampa
.06 Abilitazione valore di riferimento del
numero di giri
.07 Tacitazione anomalia
.08 Funzionamento a impulsi bit 0
.09 Funzionamento a impulsi bit 1
.10 Controllo da parte del PLC
Modalità PROFIdrive STW1.10 = 0
0 Congelare valori di riferimento e continuare
l'elaborazione dei segni di vita
1 Congelare valori di riferimento e segni di vita
2 Non congelare i valori di riferimento
PROFIdrive STW/ZSW Interface Mode
0 SINAMICS
2 VIK-NAMUR
Tempo di sorveglianza interfaccia del bus di
campo [ms]
N. par.
Nota
352),%86352),GULYH
p2042
r2043
p2044
p2047
r2050
p2051
r2053
r2054
r2055
r2074
r2075
r2076
r2077
p2079
p2080
p2088
Numero di identificazione PROFIBUS
0 SINAMICS
2 VIK-NAMUR
BO: Stato PZD PROFIdrive
.00
Anomalia valore di riferimento
.02
Bus di campo in funzione
PROFIdrive Ritardo anomalia [s]
PROFIBUS Tempo di sorveglianza aggiuntivo
[ms]
CO: PROFIdrive Ricezione PZD formato parola
[0] PZD 1
… [7] PZD 8
CI: PROFIdrive Invio PZD formato parola
[0] PZD 1
… [7] PZD 8
PROFIdrive Diagnostica Invio PZD formato parola
[0] PZD 1
… [7] PZD 8
Stato PROFIBUS
0 Off
1 Nessun collegamento (ricerca velocità di
trasmissione)
2 Collegamento OK (velocità di trasmissione
trovata)
3 Collegamento ciclico con master (Data
Exchange)
4 Dati ciclici OK
PROFIBUS Diagnostica standard
[0] Indirizzo di bus master
[1] Lunghezza totale Master Input byte
[2] Lunghezza totale Master Output byte
PROFIdrive Diagnostica Indirizzo di bus
Ricezione PZD
[0] PZD 1
… [7] PZD 8
PROFIdrive Diagnostica Offset telegrammi
Ricezione PZD
[0] PZD 1
… [7] PZD 8
PROFIdrive Diagnostica Offset telegrammi Invio
PZD
[0] PZD 1
… [7] PZD 8
PROFIBUS Diagnostica Indirizzi traffico
trasversale
PROFIdrive Selezione telegramma PZD esteso
Vedere p0922
BI: Convertitore binettore-connettore parola di
stato 1
I singoli bit vengono riuniti nella parola di stato 1.
Convertitore binettore-connettore, inversione
parola di stato
Convertitore di frequenza
36
Getting Started, 01/2011, FW 4.4, A5E02999802A AC
Lista parametri
N. par.
r2089
r2090
r2091
r2092
r2093
r2094
r2095
Nota
CO: Convertitore binettore-connettore, invio
parola di stato
[0] Parola di stato 1
[1] Parola di stato 2
[2] Parola di stato libera 3
[3] Parola di stato libera 4
[4] Parola di stato libera 5
BO: PROFIdrive Ricezione PZD1 bit per bit
BO: PROFIdrive Ricezione PZD2 bit per bit
BO: PROFIdrive Ricezione PZD3 bit per bit
BO: PROFIdrive Ricezione PZD4 bit per bit
BO: Convertitore connettore-binettore, uscita
binettore
BO: Convertitore connettore-binettore, uscita
binettore
$QRPDOLHSDUWHHDYYLVL
p2100
p2101
p2103
p2104
p2106
r2110
p2111
p2112
r2122
r2123
r2124
r2125
p2126
p2127
p2128
r2129
r2130
r2133
r2134
r2135
r2136
r2138
r2139
r2169
Impostare numero di anomalia per reazione
all'anomalia
Impostazione reazione all'anomalia
0 Nessuna
1 OFF1
2 OFF2
3 OFF3
5 STOP2
6 Frenatura in corrente
continua
BI: 1. Tacitazione anomalie
BI: 2. Tacitazione anomalie
BI: Anomalia esterna 1
Numero di avviso
Contatore avvisi
BI: Avviso esterno 1
Codice di avviso
Tempo in cui è avvenuto l'avviso [ms]
Valore avviso
Tempo di eliminazione avviso [ms]
Impostare numero di anomalia per modalità di
tacitazione
Impostazione modalità di tacitazione
Selezione codice di anomalia/avviso per trigger
CO/BO: Parola di trigger per anomalie e avvisi
Tempo in cui è avvenuta l'anomalia in giorni
Valore di anomalia per valori Float
Valore dell'avviso per valori Float
CO/BO: Parola di stato anomalie/avvisi 2
Tempo di eliminazione anomalia in giorni
CO/BO: Parola di comando anomalie/avvisi
CO/BO: Parola di stato anomalie/avvisi 1
CO: Valore attuale di numero di giri livellato,
messaggi
N. par.
r2197
r2198
r2199
Nota
CO/BO: Parola di stato sorveglianze 1
CO/BO: Parola di stato sorveglianze 2
CO/BO: Parola di stato sorveglianze 3
5HJRODWRUH3,'
p2200
p2201
p2202
p2203
p2204
p2205
p2206
p2207
p2208
p2209
p2210
p2211
p2212
p2213
p2214
p2215
p2216
p2220
p2221
p2222
p2223
r2224
r2225
r2229
p2230
r2231
p2235
p2236
p2237
BI: Regolatore PID, abilitazione
CO: Regolatore PID, valore fisso 1 [1 ≙ 100 %]
CO: Regolatore PID, valore fisso 2 [1 ≙ 100 %]
CO: Regolatore PID, valore fisso 3 [1 ≙ 100 %]
CO: Regolatore PID, valore fisso 4 [1 ≙ 100 %]
CO: Regolatore PID, valore fisso 5 [1 ≙ 100 %]
CO: Regolatore PID, valore fisso 6 [1 ≙ 100 %]
CO: Regolatore PID, valore fisso 7 [1 ≙ 100 %]
CO: Regolatore PID, valore fisso 8 [1 ≙ 100 %]
CO: Regolatore PID, valore fisso 9 [1 ≙ 100 %]
CO: Regolatore PID, valore fisso 10 [1 ≙ 100 %]
CO: Regolatore PID, valore fisso 11 [1 ≙ 100 %]
CO: Regolatore PID, valore fisso 12 [1 ≙ 100 %]
CO: Regolatore PID, valore fisso 13 [1 ≙ 100 %]
CO: Regolatore PID, valore fisso 14 [1 ≙ 100 %]
CO: Regolatore PID, valore fisso 15 [1 ≙ 100 %]
Regolatore PID, valore fisso, metodo di selezione
0 Valore fisso, selezione diretta
1 Valore fisso, selezione binaria
BI: Regolatore PID, selezione valore fisso bit 0
BI: Regolatore PID, selezione valore fisso bit 1
BI: Regolatore PID, selezione valore fisso bit 2
BI: Regolatore PID, selezione valore fisso bit 3
CO: Regolatore PID, valore fisso attivo
[1 ≙ 100 %]
CO/BO: Regolatore PID, selezione valore fisso,
parola di comando
Regolatore PID, numero attuale
Regolatore PID, potenziometro motore,
configurazione
.00 Salvataggio attivo
.02 Arrotondamento iniziale attivo
.03 Salvataggio non volatile attivo con
p2230.0 = 1
.04 Generatore di rampa sempre attivo
Regolatore PID, potenziometro motore, memoria
valore di riferimento
BI: Regolatore PID, potenziometro motore, valore
di riferimento più alto
BI: Regolatore PID, potenziometro motore, valore
di riferimento più basso
Regolatore PID, potenziometro motore, valore
massimo [%]
Convertitore di frequenza
Getting Started, 01/2011, FW 4.4, A5E02999802A AC
37
Lista parametri
N. par.
p2238
p2240
r2245
p2247
p2248
r2250
p2251
p2253
p2254
p2255
p2256
p2257
p2258
r2260
p2261
p2263
p2264
p2265
r2266
p2267
p2268
p2269
p2270
p2271
Nota
Regolatore PID, potenziometro motore, valore
minimo [%]
Regolatore PID, potenziometro motore, valore
iniziale [%]
CO: Regolatore PID, potenziometro motore,
valore di riferimento prima di GdR [1 ≙ 100 %]
Regolatore PID, potenziometro motore, tempo di
accelerazione [s]
Regolatore PID, potenziometro motore, tempo di
decelerazione [s]
CO: Regolatore PID, potenziometro motore,
valore di riferimento dopo GdR [1 ≙ 100 %]
Modalità regolatore PID
0 Regolatore PID come valore di riferimento
principale del numero di giri
1 Regolatore PID come valore di riferimento
aggiuntivo del numero di giri
CI: Regolatore PID, valore di riferimento 1
[1 ≙ 100 %]
CI: Regolatore PID, valore di riferimento 2
[1 ≙ 100 %]
Regolatore PID, valore di riferimento 1, scalatura
[%]
Regolatore PID, valore di riferimento 2, scalatura
[%]
Regolatore PID, tempo di accelerazione [s]
Regolatore PID, tempo di decelerazione [s]
CO: Regolatore PID, valore di riferimento dopo il
generatore di rampa [1 ≙ 100 %]
Regolatore PID, filtro valore di riferimento
costante di tempo [s]
Tipo regolatore PID
0 Componente D nel segnale del valore attuale
1 Componente D nel segnale di errore
CI: Regolatore PID, valore attuale [1 ≙ 100 %]
Regolatore PID, filtro valore attuale costante di
tempo [s]
CO: Regolatore PID, valore attuale dopo filtro
[1 ≙ 100 %]
Regolatore PID, limite superiore valore attuale
[1 ≙ 100 %]
Regolatore PID, limite inferiore valore attuale
[1 ≙ 100 %]
Regolatore PID, guadagno valore attuale [%]
Regolatore PID, selezione funzione valore attuale
0 Nessuna funzione
1 √x
2 x²
3 x³
Regolatore PID, inversione valore attuale (tipo di
sensore)
N. par.
r2272
r2273
p2274
p2280
p2285
p2286
p2289
p2291
p2292
p2293
r2294
p2295
p2296
p2297
p2298
p2299
p2302
p2306
r2344
p2345
r2349
p2900
p2901
r2902
p2930
Nota
1 Inversione segnale del valore attuale del
regolatore PID
CO: Regolatore PID, valore attuale scalato
[1 ≙ 100 %]
CO: Regolatore PID, errore [1 ≙ 100 %]
Regolatore PID, differenziazione costante di
tempo [s]
Regolatore PID, guadagno proporzionale
Regolatore PID, tempo dell'azione integratrice [s]
BI: Regolatore PID, arresto integratore
CI: Regolatore PID, segnale di precomando
[1 ≙ 100 %]
CO: Regolatore PID, limitazione massima
[1 ≙ 100 %]
CO: Regolatore PID, limitazione minima
[1 ≙ 100 %]
Regolatore PID, tempo di
accelerazione/decelerazione [s]
CO: Regolatore PID, segnale di uscita
[1 ≙ 100 %]
CO: Regolatore PID, uscita scalatura [1 ≙ 100 %]
CI: Regolatore PID, uscita scalatura [1 ≙ 100 %]
CI: Regolatore PID, sorgente del segnale
limitazione massima [1 ≙ 100 %]
CI: Regolatore PID, sorgente del segnale
limitazione minima [1 ≙ 100 %]
CI: Regolatore PID, limitazione offset [1 ≙ 100 %]
Regolatore PID, segnale di uscita, valore iniziale
[%]
Regolatore PID, inversione del segnale di errore
1 Inversione del segnale di errore del
regolatore PID
CO: Regolatore PID, ultimo valore di riferimento
del numero di giri (livellato) [1 ≙ 100 %]
Regolatore PID, reazione all'errore
0 Funzione bloccata
1 In caso di errore: commutazione a r2344 (o
p2302)
2 In caso di errore: commutazione a p2215
CO/BO: Regolatore PID, parola di stato
CO: Valore fisso 1 [%]
CO: Valore fisso 2 [%]
CO: Valori fissi [%]
CO: Valore fisso M [Nm]
Convertitore di frequenza
38
Getting Started, 01/2011, FW 4.4, A5E02999802A AC
Lista parametri
N. par.
Nota
0HVVDJJL
r3113
p3321
p3322
p3323
p3324
p3325
p3326
p3327
p3328
p3329
Macchina fluidodinamica P = f(n), coordinata Y:
flusso P 1 %, punto 1
Macchina fluidodinamica P = f(n), coordinata X:
flusso n 1 %, punto 1
P = f(n), coordinata Y: flusso P 2 %, punto 2
P = f(n), coordinata X: flusso n 2 %, punto 2
P = f(n), coordinata Y: flusso P 3 %, punto 3
P = f(n), coordinata X: flusso n 3 %, punto 3
P = f(n), coordinata Y: flusso P 4 %, punto 4
P = f(n), coordinata X: flusso n 4 %, punto 4
P = f(n), coordinata Y: flusso P 5 %, punto 5
P = f(n), coordinata X: flusso n 5 %, punto 5
&RQWUROORDGXHWUHILOL
p3330
p3331
p3332
r3333
p3334
BI: Controllo a 2/3 fili 1
BI: Controllo a 2/3 fili 2
BI: Controllo a 2/3 fili 3
CO/BO: Output 2/3 fili
.00 2/3 fili ON
.01 2/3 fili, inversione senso di rotazione
.02 2/3 fili ON / inversione
.03 2/3 fili inversione del senso di rotazione /
inversione
2/3 fili, selezione
0 Nessun controllo a 2/3 fili
1 2 fili, verso destra / sinistra 1
2 2 fili, verso destra / sinistra 2
3 3 fili abilitazione / verso destra / sinistra
4 3 fili, abilitazione / ON / inversione del senso
di rotazione
)UHQDWXUD&RPSRXQG
p3856
r3859
Corrente di frenatura Compound [%]
CO/BO: Frenatura Compound, parola di stato
3DUDPHWULGLJHVWLRQH
p3900
r3925
p3950
p3981
p3985
r3996
p7760
Conclusione messa in servizio rapida
Identificazioni, segnalazione di fine
Parametri di service
Tacitazione anomalie oggetto di azionamento
Priorità di comando, modalità per selezione
Stato di blocco scrittura parametri
Parametri di impostazione protezione di scrittura
1 Attiva
Nota
Macro oggetto di azionamento
&$1RSHQ
CO/BO: Barra dei bit di segnalazione NAMUR
&DUDWWHULVWLFDPRWRUH
p3320
N. par.
r8570
r8600
r8601
p8602
p8603
p8604
p8606
r8607
p8608
p8609
r8610
p8611
p8620
r8621
p8622
p8623
p8630
p8641
r8680
p8684
p8685
p8699
p8700
p8701
p8702
p8703
p8704
p8705
p8706
p8707
p8710
p8711
p8712
p8713
p8714
p8715
p8716
p8717
p8720
p8721
CAN Device Type
CAN Error Register
CAN SYNC-Object
CAN COB-ID Emergency Message [hex]
CAN Node Guarding
CAN Producer Heartbeat Time [ms]
CAN Identity Object
CAN Clear Bus Off Error
CAN Error Behaviour
CAN First Server SDO
CAN Pre-defined Error Field [hex]
CAN Node-ID
CAN Node-ID attivo
CAN bitrate [kbit/s]
0 1000
1 800
2 500
3 250
4 125
5 50
6 20
7 10
CAN Bit Timing selection [hex]
CAN Oggetti virtuali
CAN Abort Connection Option Code
0 Nessuna reazione
1 OFF1
2 OFF2
3 OFF3
CAN Diagnosis Hardware
CAN NMT Stato dopo avviamento
CAN NMT Stato
CAN RPDO Tempo di sorveglianza [ms]
CAN Receive PDO 1 [hex]
CAN Receive PDO 2 [hex]
CAN Receive PDO 3 [hex]
CAN Receive PDO 4 [hex]
CAN Receive PDO 5 [hex]
CAN Receive PDO 6 [hex]
CAN Receive PDO 7 [hex]
CAN Receive PDO 8 [hex]
CAN Receive Mapping per RPDO 1 [hex]
CAN Receive Mapping per RPDO 2 [hex]
CAN Receive Mapping per RPDO 3 [hex]
CAN Receive Mapping per RPDO 4 [hex]
CAN Receive Mapping per RPDO 5 [hex]
CAN Receive Mapping per RPDO 6 [hex]
CAN Receive Mapping per RPDO 7 [hex]
CAN Receive Mapping per RPDO 8 [hex]
CAN Transmit PDO 1 [hex]
CAN Transmit PDO 2 [hex]
Convertitore di frequenza
Getting Started, 01/2011, FW 4.4, A5E02999802A AC
39
Lista parametri
N. par.
p8722
p8723
p8724
p8725
p8726
p8727
p8730
p8731
p8732
p8733
p8734
p8735
p8736
p8737
p8741
p8744
r8750
r8751
r8784
p8785
p8786
p8787
p8790
r8795
r8797
Nota
CAN Transmit PDO 3 [hex]
CAN Transmit PDO 4 [hex]
CAN Transmit PDO 5 [hex]
CAN Transmit PDO 6 [hex]
CAN Transmit PDO 7 [hex]
CAN Transmit PDO 8 [hex]
CAN Transmit Mapping per TPDO 1 [hex]
CAN Transmit Mapping per TPDO 2 [hex]
CAN Transmit Mapping per TPDO 3 [hex]
CAN Transmit Mapping per TPDO 4 [hex]
CAN Transmit Mapping per TPDO 5 [hex]
CAN Transmit Mapping per TPDO 6 [hex]
CAN Transmit Mapping per TPDO 7 [hex]
CAN Transmit Mapping per TPDO 8 [hex]
CAN PDO Conferma configurazione
CAN PDO Mapping Configurazione
1: Predefined Connection Set
2: PDO Mapping libero
CAN Oggetti Receive mappati 16 bit
CAN Oggetti Receive mappati 16 bit
CO: CAN Parola di stato
BI: CAN Parola di stato bit 8
BI: CAN Parola di stato bit 14
BI: CAN Parola di stato bit 15
CAN Interconnessione automatica parola di
comando
CAN Parola di comando
CAN Target Torque
352),GULYH
r8820
p8991
Identification and Maintenance 0
Accesso alla memoria USB
&RHUHQ]DHPHPRUL]]D]LRQHGHLSDUDPHWUL
p9400
r9401
r9463
p9484
r9485
Rimozione sicura scheda di memoria
0
Nessuna scheda di memoria inserita
1
Scheda di memoria inserita
2
Richiedere "Rimozione sicura" della scheda
di memoria
3
"Rimozione sicura" possibile
100 "Rimozione sicura" impossibile causa
accesso in corso
Rimozione sicura scheda di memoria, stato
Macro valida impostata
Interconnessioni BICO, ricerca sorgente di
segnale
Interconnessioni BICO, ricerca sorgente di
segnale, numero
N. par.
r9486
Nota
Interconnessioni BICO, ricerca sorgente di
segnale, primo indice
6DIHW\,QWHJUDWHG
p9601
p9610
p9650
p9651
p9659
r9660
p9700
p9701
p9761
p9762
p9763
r9770
r9771
r9772
r9773
r9780
r9781
r9782
r9794
r9795
r9798
p9799
p9801
p9810
p9850
p9851
r9871
r9872
r9898
p9899
SI Abilitazione funzioni integrate nell'azionamento
(processore 1)
SI Indirizzo PROFIsafe (processore 1)
SI Commutazione F-DI, tempo di tolleranza
(processore 1) [ms]
SI STO tempo di antirimbalzo (processore 1) [ms]
SI Timer dinamizzazione forzata [h]
SI Tempo residuo dinamizzazione forzata
SI Funzione di copiatura
SI Conferma modifica dati
SI Immissione password [hex]
SI Password nuova [hex]
SI Conferma password [hex]
SI Versione funzioni di sicurezza integrate
nell'azionamento (processore 1)
SI Funzioni comuni (processore 1)
CO/BO: SI Stato (processore 1)
CO/BO: SI Stato (processore 1 - processore 2)
SI Clock di sorveglianza (processore 1)
SI Checksum controllo modifiche (processore 1)
SI Marca temporale controllo modifiche
(processore 1)
SI Lista confronto incrociato (processore 1)
SI Diagnostica STOP F (processore 1)
SI Checksum attuale parametri SI (processore 1)
SI Checksum di riferimento parametri SI
(processore 1)
SI Abilitazione funzioni integrate nell'azionamento
(processore 2)
SI Indirizzo PROFIsafe (processore 2)
SI Tempo di tolleranza commutazione F-DI
(processore 2)
SI STO tempo di antirimbalzo (processore 2)
SI Funzioni comuni (processore 2)
CO/BO: SI Stato (Power Module)
SI Checksum attuale parametri SI (processore 2)
SI Checksum di riferimento parametri SI
(processore 2)
'LDJQRVWLFDLQWHUQD
r9976
Fattore di utilizzo sistema
[1] Fattore di utilizzo del tempo di calcolo
[5] Fattore di utilizzo lordo massimo
Convertitore di frequenza
40
Getting Started, 01/2011, FW 4.4, A5E02999802A AC
6
Eliminazione di errori
6.1
Lista degli avvisi e delle anomalie
Axxxxx: Avviso
Fyyyyy: Anomalia
Tabella 6- 1
Principali avvisi ed anomalie delle funzioni di sicurezza
Numero
Causa
Rimedio
F01600
STOP A attivato
Selezionare e deselezionare la funzione STO
F01650
Prova di collaudo necessaria
Eseguire la prova di collaudo e redigere il relativo certificato.
F01659
Richiesta di scrittura parametri
rifiutata
Causa: è stato selezionato il ripristino dei parametri. I parametri fail-safe non
vengono tuttavia ripristinati poiché le funzioni di sicurezza sono appena
state abilitate
Infine disattivare e riattivare la Control Unit.
Rimedio: bloccare le funzioni di sicurezza o ripristinare i parametri fail-safe
(p0970 = 5), quindi eseguire un nuovo ripristino dei parametri
dell'azionamento
A01666
Segnale 1 statico su F-DI per
tacitazione sicura
Impostare l'F-DI sul segnale logico 0
A01698
Modo di messa in servizio per
funzioni di sicurezza attivo
Questo messaggio scompare al termine della messa in servizio Safety
A01699
Test dei circuiti di disinserzione
necessario
Dopo la successiva deselezione della funzione "STO", il messaggio
scompare e il tempo di sorveglianza viene resettato
F30600
STOP A attivato
Selezionare e deselezionare la funzione STO
Tabella 6- 2
Avvisi e anomalie principali
Numero
Causa
Rimedio
F01018
Avviamento interrotto più volte
1. Disinserire e reinserire l'unità.
2. Dopo che è stata emessa quest'anomalia, l'unità viene avviata con le
impostazioni di fabbrica.
3. Mettere nuovamente in servizio il convertitore.
A01028
Errore di configurazione
Spiegazione: La parametrizzazione nella scheda di memoria è stata
generata con un'unità di altro tipo (numero di ordinazione, MLFB).
Verificare i parametri dell'unità ed eseguire eventualmente una nuova
messa in servizio.
F01033
Commutazione di unità: valore
parametro di riferimento non
valido
Impostare il valore del parametro di riferimento ad un valore diverso da 0.0
(p0304, p0305, p0310, p0596, p2000, p2001, p2002, p2003, r2004).
F01034
Commutazione di unità: calcolo
valori dei parametri fallito dopo
la modifica del valore di
riferimento
Selezionare il valore del parametro di riferimento in modo tale che i
parametri interessati possano essere calcolati in rappresentazione relativa
(p0304, p0305, p0310, p0596, p2000, p2001, p2002, p2003, r2004).
Convertitore di frequenza
Getting Started, 01/2011, FW 4.4, A5E02999802A AC
41
Eliminazione di errori
6.1 Lista degli avvisi e delle anomalie
Numero
Causa
Rimedio
F01122
Frequenza troppo elevata
sull'ingresso del tastatore di
misura
Ridurre la frequenza degli impulsi sull'ingresso del tastatore di misura
A01590
Intervallo di manutenzione
motore scaduto
Effettuare la manutenzione.
A01900
PROFIBUS: Telegramma di
configurazione errato
Spiegazione: Un master PROFIBUS tenta di stabilire un collegamento con
un telegramma di configurazione errato.
Controllare la progettazione del bus sul lato master e sul lato slave.
F01910
Timeout valore di riferimento
interfaccia bus di campo
Controllare il collegamento del bus e i partner di comunicazione, ad es.
commutare il master PROFIBUS nello stato RUN.
A01920
PROFIBUS: Interruzione
collegamento ciclico
Spiegazione: Il collegamento ciclico con il master PROFIBUS è interrotto.
Stabilire il collegamento con PROFIBUS e attivare il master PROFIBUS con
funzionamento ciclico.
F03505
Rottura del conduttore
nell'ingresso analogico
Controllare la presenza di eventuali interruzioni del collegamento con la
sorgente del segnale.
Verificare l'intensità del segnale immesso.
La corrente di ingresso misurata dall'ingresso analogico può essere letta in
r0752.
A03520
Errore sensore di temperatura
Verificare il corretto collegamento del sensore.
A05000
A05001
A05002
A05004
A05006
Sovratemperatura del Power
Module
Controllare quanto segue:
- La temperatura ambiente rientra nei limiti definiti?
- Le condizioni di carico e il ciclo sono progettati in maniera proporzionale?
- Si è verificato un guasto del sistema di raffreddamento?
F06310
Tensione di collegamento
(p0210) parametrizzata in modo
errato
Controllare la tensione di collegamento parametrizzata ed eventualmente
modificarla (p0210).
Sovratemperatura del motore
Ridurre il carico del motore.
F07011
Controllare la tensione di rete.
Controllare la temperatura ambiente.
Controllare il cablaggio e il collegamento del sensore.
A07012
Sovratemperatura modello
motore I2t
Controllare il carico del motore ed eventualmente ridurlo.
Controllare la temperatura ambiente del motore.
Controllare la costante di tempo termica p0611.
Controllare la soglia di anomalia della sovratemperatura p0605.
A07015
Avviso sensore della
temperatura motore
Verificare il corretto collegamento del sensore.
F07016
Anomalia sensore temperatura
motore
Controllare che il collegamento del sensore sia corretto.
F07086
F07088
Commutazione di unità:
violazione limite parametro
Verificare i valori di parametro adattati ed eventualmente correggerli.
Verificare la parametrizzazione (p0601).
Controllare la parametrizzazione (p0601).
Convertitore di frequenza
42
Getting Started, 01/2011, FW 4.4, A5E02999802A AC
Eliminazione di errori
6.1 Lista degli avvisi e delle anomalie
Numero
Causa
Rimedio
F07320
Riavvio automatico interrotto
Aumentare il numero di tentativi di riavvio (p1211). Il numero attuale di
tentativi di riavvio viene visualizzato in r1214.
Aumentare il tempo di attesa in p1212 e/o il tempo di sorveglianza in p1213.
Applicare il comando ON (p0840).
Aumentare o disattivare il tempo di sorveglianza della parte di potenza
(p0857).
Diminuire il tempo di attesa per il reset del contatore errori p1213[1] in modo
che vengano registrati meno errori nell'intervallo di tempo.
A07321
Riavvio automatico attivo
Spiegazione: La modalità di reinserzione automatica (RA) è attiva. Con il
ripristino della rete e/o l'eliminazione delle cause di anomalia, l'azionamento
si reinserisce automaticamente.
F07330
Corrente di ricerca troppo bassa
Aumentare la corrente di ricerca (P1202), controllare il collegamento del
motore.
A07400
Regolatore VDC_max attivo
Se non si desidera l'intervento del regolatore:
A07409
F07426
F07801
Controllo U/f regolatore della
limitazione di corrente attivo
•
aumentare i tempi di decelerazione.
•
Disinserire il regolatore VDC_max (p1240 = 0 con regolazione vettoriale,
p1280 = 0 con controllo U/f).
L'avviso scompare automaticamente dopo una delle seguenti misure:
•
Aumento dei limiti di corrente (p0640).
•
Riduzione del carico.
•
Rallentamento delle rampe di accelerazione per il numero di giri di
riferimento.
Regolatore PID, valore attuale
limitato
•
Adattare i limiti al livello del segnale (p2267, p2268).
•
Verificare la scalatura del valore attuale (p2264).
Sovracorrente del motore
Verificare i limiti di corrente (p0640).
Controllo U/f: controllare il regolatore di limitazione di corrente
(p1340 … p1346).
Aumentare la rampa di accelerazione (p1120) oppure diminuire il carico.
Controllare eventuali cortocircuiti o dispersioni verso terra nel motore e nei
cavi motore.
Verificare la commutazione stella/triangolo e la parametrizzazione della
targhetta del motore.
Controllare la combinazione parte di potenza e motore.
Selezionare la funzione di riavviamento al volo (p1200) se la commutazione
avviene con il motore in rotazione.
A07805
Azionamento: Sovraccarico della •
parte di potenza I2t
•
•
A07850
Avviso esterno 1
Ridurre il carico continuo.
Adattare il ciclo di carico.
Controllare l'assegnazione delle correnti nominali di motore e parte di
potenza.
È stato emesso il segnale per "Avviso esterno 1".
Il parametro p2112 definisce la sorgente di segnale dell'avviso esterno.
Rimedio: Eliminare i fattori che provocano questo avviso.
F07901
Fuorigiri motore
Attivare il precomando del regolatore di limitazione del numero di giri (p1401
bit 7 = 1).
Convertitore di frequenza
Getting Started, 01/2011, FW 4.4, A5E02999802A AC
43
Eliminazione di errori
6.1 Lista degli avvisi e delle anomalie
Numero
Causa
Rimedio
F07902
Motore in stallo
Controllare che i dati del motore siano parametrizzati correttamente ed
eseguire un'identificazione motore.
Verificare i limiti di corrente (p0640, r0067, r0289). Se i limiti di corrente
sono troppo bassi, è impossibile rimagnetizzare l'azionamento.
Controllare se i cavi del motore vengono separati durante il funzionamento.
A07910
Sovratemperatura del motore
Controllare il carico del motore.
Controllare la temperatura ambiente del motore.
Controllare il sensore KTY84.
A07920
Coppia / numero di giri troppo
basso
A07921
Coppia / numero di giri troppo
alto
A07922
Coppia / numero di giri al di fuori
della tolleranza
F07923
Coppia / numero di giri troppo
basso
La coppia si discosta dalla linea di inviluppo coppia / numero di giri.
•
Controllare il collegamento tra motore e carico.
•
Adattare la parametrizzazione conformemente al carico.
•
Controllare il collegamento tra motore e carico.
•
Adattare la parametrizzazione conformemente al carico.
F07924
Coppia / numero di giri troppo
alto
A07927
Frenatura in corrente continua
attiva
Non necessaria
A07980
Misura in rotazione attivata
Non necessaria
A07981
Misura in rotazione, abilitazioni
mancanti
Tacitare le anomalie presenti.
A07991
Identificazione dati motore
attivata
Inserire il motore e identificare i dati motore.
F30001
Sovracorrente
Verificare quanto segue:
Impostare le abilitazioni mancanti (vedere r00002, r0046).
•
Controllare i dati del motore, eventualmente eseguire la messa in
servizio
•
Tipo di circuito del motore (Υ / Δ)
•
Funzionamento U/f: controllare l'assegnazione delle correnti nominali di
motore e parte di potenza
•
Qualità della rete
•
Collegamento corretto della bobina di commutazione di rete
•
Collegamento dei cavi di potenza
•
Verificare l'assenza di cortocircuiti o errori di messa a terra nei cavi di
potenza
•
Lunghezza dei cavi di potenza
• Fasi di rete
Se il rimedio non funziona:
•
Funzionamento U/f: aumentare la rampa di accelerazione
•
Ridurre il carico
•
Sostituire la parte di potenza
Convertitore di frequenza
44
Getting Started, 01/2011, FW 4.4, A5E02999802A AC
Eliminazione di errori
6.1 Lista degli avvisi e delle anomalie
Numero
Causa
Rimedio
F30005
Sovraccarico I2t convertitore
Verificare le correnti nominali del motore e del Power Module.
Ridurre il limite di corrente p0640.
Nel funzionamento con caratteristica U/f: diminuire p1341.
F30011
Mancanza della fase di rete
Controllare i fusibili di ingresso del convertitore.
Controllare i cavi di alimentazione del motore.
F30015
Mancanza di fase cavo di
alimentazione del motore
Controllare i cavi di alimentazione del motore.
F30021
Guasto verso a terra
•
Controllare il collegamento dei cavi di potenza.
•
Controllare il motore.
•
Controllare il trasformatore di corrente.
•
Controllare i cavi e i contatti del collegamento del freno (eventuali rotture
dei conduttori).
Aumentare la rampa di accelerazione o di decelerazione (p1120).
F30027
Sorveglianza del tempo di
precarica del circuito intermedio
Controllare la tensione di rete sui morsetti di ingresso.
F30035
Sovratemperatura aria in
ingresso
•
Controllare se il ventilatore funziona.
•
Controllare i filtri del ventilatore.
•
Verificare che la temperatura ambiente rientri nell'intervallo consentito.
F30036
Sovratemperatura spazio interno
F30037
Sovratemperatura del
raddrizzatore
Controllare l'impostazione della tensione di rete (p0210).
Vedere F30035 ed inoltre:
•
Controllare il carico del motore.
•
Controllare le fasi di rete
A30049
Guasto del ventilatore dello
spazio interno
Controllare il ventilatore dello spazio interno ed eventualmente sostituirlo.
F30059
Guasto del ventilatore dello
spazio interno
Controllare il ventilatore dello spazio interno ed eventualmente sostituirlo.
A30502
Sovratensione circuito
intermedio
•
Verificare la tensione di collegamento dell'apparecchio (p0210).
•
Controllare il dimensionamento della bobina di rete.
Errore sensore di temperatura
Verificare il corretto collegamento del sensore.
A30920
Per maggiori informazioni vedere il Manuale delle liste.
Convertitore di frequenza
Getting Started, 01/2011, FW 4.4, A5E02999802A AC
45
Eliminazione di errori
6.2 Ulteriori informazioni
6.2
Tabella 6- 3
Ulteriori informazioni
Supporto tecnico
Francia
Germania
Italia
Spagna
Gran Bretagna
+33 (0) 821 801 122
+49 (0)911 895 7222
+39 (02) 24362000
+34 902 237 238
+44 161 446 5545
Altri numeri telefonici di assistenza: Supporto di prodotto (http://support.automation.siemens.com/WW/view/it/4000024)
Tabella 6- 4
Manuali con informazioni dettagliate
Livello di
informazione
Manuale
Contenuto
Lingue
disponibili
Download o numero di ordinazione
+
Getting Started
(il presente manuale)
++
Istruzioni operative - Installazione, messa in servizio
Convertitore di
e funzionamento del
frequenza
convertitore di frequenza.
Descrizione delle funzioni del
convertitore di frequenza.
Dati tecnici.
inglese,
tedesco,
italiano,
francese,
spagnolo,
turco,
cinese
Download della documentazione
(http://support.automation.siemens.c
om/WW/view/it/36426537/133300)
+++
Manuale di guida
alle funzioni Safety
Integrated
Configurazione PROFIsafe.
Installazione, messa in servizio
e funzionamento della funzione
fail-safe integrata.
+++
Manuale delle liste
Lista completa dei parametri,
avvisi e anomalie.
Schemi logici grafici.
+++
Istruzioni operative - Descrizione dell'Operator Panel
BOP-2, IOP
Tabella 6- 5
inglese,
tedesco
N. di ordinazione:
SD Manual Collection (DVD)
•
6SL3298-0CA00-0MG0
Fornitura unica
•
6SL3298-0CA10-0MG0
Servizio di aggiornamento per 1
anno; 4 forniture
Parti di ricambio
N. di ordinazione
Kit parti di ricambio con 5 set di morsetti I/O, 1 set porta e 1 copertura cieca
6SL3200-0SK40-0AA0
Piastre di schermatura
Grandezza costruttiva A
6SL3266-1EA00-0KA0
Grandezza costruttiva B
6SL3266-1EB00-0KA0
Grandezza costruttiva C
6SL3266-1EC00-0KA0
Grandezza costruttiva A
6SL3200-0ST05-0AA0
Grandezza costruttiva B
6SL3200-0ST06-0AA0
Grandezza costruttiva C
6SL3200-0ST07-0AA0
Grandezza costruttiva A
6SL3200-0SF12-0AA0
1 set con connettori di collegamento (rete, motore e
resistenza di frenatura)
Unità ventilatori
Copertura superiore con ventilatore integrato
Grandezza costruttiva B
6SL3200-0SF13-0AA0
Grandezza costruttiva C
6SL3200-0SF14-0AA0
Grandezza costruttiva A
6SL3200-0SF40-0AA0
Grandezza costruttiva B
6SL3200-0SF41-0AA0
Grandezza costruttiva C
6SL3200-0SF42-0AA0
Convertitore di frequenza
46
Getting Started, 01/2011, FW 4.4, A5E02999802A AC
Siemens AG
Industry Sector
Drive Technologies
Motion Control Systems
Postfach 3180
91050 ERLANGEN
DEUTSCHLAND
Ci riserviamo eventuali modifiche tecniche.
© Siemens AG 2011
www.siemens.com/sinamics-g120