INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO
Laurea Specialistica in Ingegneria Meccatronica
SPECIFICHE DI PROGETTO
DI SISTEMI DI CONTROLLO
Ing. Cristian Secchi
Tel. 0522 522235
e-mail: [email protected]
http://www.dismi.unimo.it/Members/csecchi
Tipi di Specifiche
Nel progetto di un sistema di controllo, il progettista cerca di far sì che il sistema
in retroazione complessivo abbia alcune caratteristiche statiche e/o dinamiche
desiderate. Queste caratteristiche vengono usualmente assegnate come
specifiche che il sistema deve soddisfare in condizioni statiche (o di regime) e
durante i transitori. Tali specifiche possono essere definite sia nel dominio
temporale che nel dominio frequenziale e riguardano in generale:
• precisione a regime: capacità di un sistema di seguire alcuni segnali di
riferimento con il minimo errore.
• risposta nel transitorio: andamento per tempi finiti dell’uscita del sistema
in retroazione in risposta a tipici segnali in ingresso.
• stabilità relativa: rifacendosi ai diagrammi di Nyquist, è possibile valutare il
“grado” di stabilità di un sistema osservando la “distanza” del diagramma
polare dal punto critico −1 + j0. Si possono quindi definire parametri che
permettono di valutare la stabilità relativa di un sistema discreto, in modo
analogo a quanto fatto per quelli continui (margini di stabilità);
Cristian Secchi
2005-2006
ITSC05 – p. 2/30
Tipi di specifiche
• sensitività parametrica: si desidera che le prestazioni del sistema non
vengano alterate da variazioni dei parametri rispetto ai valori nominali.
• reiezione di disturbi: capacità del sistema controllato di ridurre al minimo
l’influenza sull’uscita di eventuali disturbi che entrano nell’anello di controllo,
quali errori di misura, variazioni di carico, rumore sulle variabili acquisite,
ecc.;
• azione di controllo: vincoli sull’ampiezza massima della variabile
manipolabile v(t).
Cristian Secchi
2005-2006
ITSC05 – p. 3/30
Errori a regime
R(s)
E(s)
- j
-
D(s)
-
G(s)
C(s)
-
- 6
• Dato il sistema
G(s) =
K(1 + sq1 )(1 + sq2 ) . . . (1 + sqm )
sN (1 + sp1 )(1 + sp2 ) . . . (1 + spp )
si definisce tipo del sistema il numero N di poli di G(s) presenti nell’origine.
• Il tipo indica il numero di integratori presenti nel sistema. Un sistema di tipo
0 non presenta integratori puri tra ingresso ed uscita, un sistema di tipo 1
ne presenta uno ...
• Nel caso discreto la definizione di tipo fa riferimento al numero di poli nel
punto z = 1.
Cristian Secchi
2005-2006
ITSC05 – p. 4/30
Errori a regime
Si consideri il seguente sistema di controllo digitale a retroazione unitaria:
HP (z)
R(z)
E(z)
- j
-
D(z)
- Hold
-
P (s)
C(z)
-
- 6
La funzione di trasferimento discreta del ramo diretto è
G(z) = D(z)HP (z)
con (nel caso di ricostruttore di ordine 0)
HP (z) = (1 − z −1 )Z
Cristian Secchi
2005-2006
P (s)
s
ITSC05 – p. 5/30
Errori a regime
E(z) = R(z) − G(z)E(z)
1
R(z)
E(z) =
1 + G(z)
Assumendo che il sistema stabile, é possibile calcolare l’errore a regime
mediante il teorema del valore finale:
ereg = limk→∞ e(k)
=
−1
limz→1 (1 − z )E(z)
=
limz→1 (1 − z
=
Cristian Secchi
limz→1
2005-2006
−1
1
) 1+G(z)
R(z)
z−1
1
z 1+G(z) R(z)
ITSC05 – p. 6/30
Errore di posizione
Si consideri come riferimento un gradino di ampiezza r0 :
r0
R(z) =
1 − z −1
L’errore a regime vale:
ep = lim (1 − z −1 )
z→1
r0
r0
1
= lim
z→1 1 + G(z)
1 + G(z) 1 − z −1
Definendo la costante di posizione (o costante di guadagno) come
kp = lim G(z)
z→1
(1)
L’errore a regime ep diventa
ep =
r0
1 + kp
(2)
Per valori finiti di kp l’errore a regime è sempre non nullo, mentre si ha ep = 0
solo nel caso in cui kp = ∞. La condizione kp = ∞ è verificata per sistemi di tipo
1, 2, . . .
Cristian Secchi
2005-2006
ITSC05 – p. 7/30
Errore di velocità
Si consideri come riferimento un segnale a rampa:
T z −1 r0
R(z) =
(1 − z −1 )2
L’errore a regime vale
ev = lim (1 − z −1 )
z→1
−1
T z r0
T r0
1
=
lim
z→1 (1 − z −1 )G(z)
1 + G(z) (1 − z −1 )2
Definendo la costante di velocità come
(1 − z −1 )G(z)
kv = lim
z→1
T
l’errore a regime diventa
ev =
Cristian Secchi
r0
kv
2005-2006
ITSC05 – p. 8/30
Errore di velocità
Per valori finiti di kv l’errore a regime per ingresso a rampa assume valori non
nulli, mentre si ha ev = 0 solo per kv = ∞. Questa condizione è verificata per
sistemi di tipo 2,3, . . . , mentre non lo è per sistemi di tipo 0 e 1. Si noti infine che
per sistemi di tipo 0, si ha kv = 0 e quindi l’errore diverge.
Cristian Secchi
2005-2006
ITSC05 – p. 9/30
Errore di accelerazione
Si consideri come riferimento un segnale parabolico:
T 2 z −1 (1 + z −1 )r0
R(z) =
2(1 − z −1 )3
Applicando il teorema del valore finale, l’errore a regime vale
ea = lim (1 − z −1 )
z→1
2 −1
−1
2
T z (1 + z )r0
T r0
1
=
lim
z→1 (1 − z −1 )2 G(z)
1 + G(z)
2(1 − z −1 )3
Definendo la costante di accelerazione come
(1 − z −1 )2 G(z)
ka = lim
z→1
T2
l’errore a regime per ingresso a parabola vale
ea =
Cristian Secchi
r0
ka
2005-2006
ITSC05 – p. 10/30
Errore di accelerazione
Per valori finiti di ka risulta ea = 0, mentre ea = 0 solo per ka = ∞, condizione
verificata per sistemi di tipo 3, 4, . . . . Per sistemi di tipo 0 e 1 si ha ka = 0 e
quindi l’errore diverge.
Per trovare l’errore a regime nel caso di segnali canonici di grado superiore
(cubici, ...) si prosegue esattamente nello stesso modo.
Cristian Secchi
2005-2006
ITSC05 – p. 11/30
Esempio:
sistema di tipo 0
z −1
G(z) =
1 − 0.5z −1
con T = 0.25 s.
Le costanti di errore di posizione, velocità ed accelerazione si ottiene:
kp
kv
ka
=
lim G(z) = 2
z→1
(1 − z −1 )G(z)
= lim
= 0
z→1
T
(1 − z −1 )G(z)
= lim
= 0
2
z→1
T
e quindi gli errori per ingresso a gradino, rampa e parabola sono rispettivamente
(r0 = 1):
1
= 0.333,
ep =
1+2
Cristian Secchi
1
ev = = ∞,
0
2005-2006
1
ea = = ∞
0
ITSC05 – p. 12/30
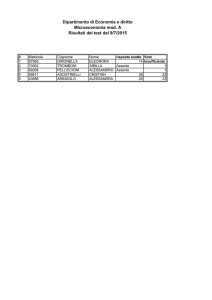
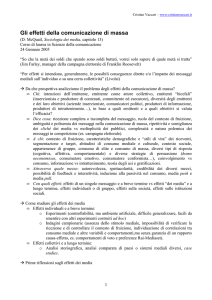
Esempio:
sistema di tipo 0
Sistema di ordine 0 con ingresso a gradino
1.2
Errore
1
0.9
1
0.8
0.7
0.8
y
0.6
0.6
0.5
0.4
0.4
0.3
0.2
0.2
0.1
0
0
0.5
1
1.5
2
2.5
3
3.5
4
Sistema di ordine 0 con ingresso a rampa
4
0
0
0.5
1
1.5
2
2.5
3
3.5
4
2.5
3
3.5
4
2.5
3
3.5
4
Errore
2
1.8
3.5
1.6
3
1.4
y
2.5
1.2
2
1
0.8
1.5
0.6
1
0.4
0.5
0.2
0
0
0.5
y
1.5
2
2.5
3
3.5
4
Sistema di ordine 0 con ingresso a parabola
8
0
0
3.5
6
3
5
2.5
4
2
3
1.5
2
1
1
0.5
0
0.5
1
1.5
2
s
2.5
3
0.5
1
1.5
3.5
4
0
0
2
Errore
4
7
0
Cristian Secchi
1
0.5
1
2005-2006
1.5
2
s
ITSC05 – p. 13/30
Esempio:
sistema di tipo 1
0.3z −2
0.3z −2
G(z) =
=
−1
−2
1 − 1.2z + 0.2z
(1 − z −1 )(1 − 0.2z −1 )
con T = 0.5 s.
Le costanti di errore di posizione, velocità ed accelerazione sono:
kp
kv
ka
=
lim G(z) = ∞
z→1
(1 − z −1 )G(z)
= lim
= 0.75
z→1
T
(1 − z −1 )G(z)
= lim
= 0
2
z→1
T
e quindi gli errori per ingresso a gradino, rampa e parabola sono rispettivamente
(r0 = 1):
ev = 1.333,
ea = ∞
ep = 0,
Cristian Secchi
2005-2006
ITSC05 – p. 14/30
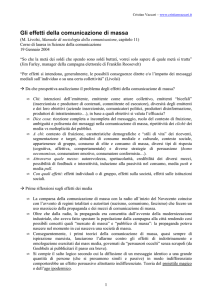
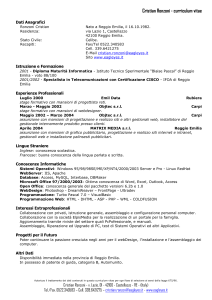
Esempio:
sistema di tipo 1
Sistema di ordine 1 con ingresso a gradino
y
1.2
1
1.5
0.8
1
0.6
0.5
0.4
0
0.2
-0.5
0
0
1
2
3
4
5
6
7
8
9
10
Sistema di ordine 1 con ingresso a rampa
10
y
Errore
2
-1
0
1.8
8
1.6
7
1.4
6
1.2
5
1
4
0.8
3
0.6
2
0.4
1
0.2
0
1
2
3
4
5
6
7
2
3
4
8
9
10
0
0
1
2
3
4
Sistema di ordine 1 con ingresso a parabola
50
5
6
7
8
9
10
6
7
8
9
10
6
7
8
9
10
Errore
2
9
0
1
5
Errore
14
45
40
12
35
10
y
30
8
25
20
6
15
4
10
2
5
0
0
Cristian Secchi
1
2
3
4
5
s
6
7
8
9
10
0
0
1
2
2005-2006
3
4
5
s
ITSC05 – p. 15/30
Specifiche sul transitorio
• Il comportamento di un sistema dinamico stabile a partire da certe
condizioni iniziali (tipicamente di quiete) in risposta a sollecitazioni esterne
può essere distinto in una fase di evoluzione transitoria, di durata limitata,
ed una fase a regime, che viene raggiunta in pratica per t sufficientemente
grande. Le caratteristiche del transitorio sono di particolare interesse per il
progetto del sistema di controllo.
• Solitamente, le specifiche che il sistema in retroazione deve soddisfare nel
transitorio sono riferite alla risposta del sistema al segnale a gradino.
Cristian Secchi
2005-2006
ITSC05 – p. 16/30
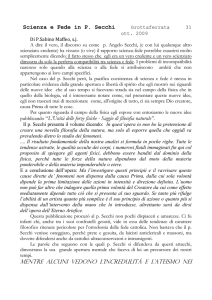
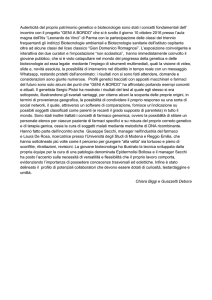
Specifiche sul transitorio
Nel caso tempo-continuo, si definiscono le seguenti caratteristiche temporali
della risposta a gradino:
• tempo di salita Ts : tempo impiegato dall’uscita per passare dal 10% al
90% (o anche dal 5% al 95%) del valore finale;
• tempo di assestamento Ta : tempo oltre il quale l’uscita si discosta meno
del 5% rispetto al valore finale (si può considerare, con specifiche più
restrittive, anche lo scostamento del 2%);
• tempo di ritardo Tr : tempo richiesto perché l’uscita raggiunga il 50% del
valore finale;
• istante di massima sovraelongazione Tm : istante di tempo in cui si ha la
massima sovraelongazione;
• massimo sorpasso o massima sovraelongazione S: valore del massimo
scostamento dell’uscita rispetto al valore di regime c(∞). Solitamente S è
definito in valore percentuale rispetto al valore di regime:
c(Tm ) − c(∞)
100
S=
c(∞)
Cristian Secchi
2005-2006
ITSC05 – p. 17/30
Specifiche sul transitorio
1.6
1.4
1.2
S
0.05
c(t)
1
0.8
0.6
0.4
Ts
0.2
0
0
Cristian Secchi
|
Tr
1
|
2
Tm
3
4
|
5
Ta
t
6
2005-2006
7
8
9
10
ITSC05 – p. 18/30
Specifiche sul transitorio per sistemi del 2o ordine
• Queste grandezze sono quantificate in rapporto a sistemi del secondo
ordine, e sono direttamente collegate alla posizione nel piano s della coppia
di poli del sistema.
• Nel caso di sistemi di ordine superiore, nella quasi totalità dei casi di
interesse pratico, è presente una coppia di poli dominanti, cioè di una
coppia di poli a parte reale (negativa) in modulo molto minore della parte
reale di altri poli eventualmente presenti nel sistema. In tal caso, le stesse
formule valide per i sistemi del secondo ordine continuano ad essere
adottate in modo approssimato.
Cristian Secchi
2005-2006
ITSC05 – p. 19/30
Specifiche sul transitorio per sistemi del 2o ordine
Si consideri un sistema del secondo ordine:
ωn2
G(s) = 2
s + 2δωn + ωn2
dove δ è il coefficiente di smorzamento e ωn la pulsazione naturale del sistema.
La posizione della coppia di poli nel piano s è data da:
jω 6
√
f
jωn 1 − δ 2
S
Sωn
S
αSS
σ
−δωn
0
f
Cristian Secchi
2005-2006
ITSC05 – p. 20/30
Specifiche sul transitorio per sistemi del 2o ordine
• tempo di salita (da 0% a 100%):
π−α
√
Tr =
ωn 1 − δ 2
• istante di massimo sorpasso:
Tm
π
√
=
ωn 1 − δ 2
• massimo sorpasso percentuale:
− √ δπ
S = 100 [c(Tm ) − 1] = 100e
1−δ 2
• tempo di assestamento
3
Ta =
δωn
Cristian Secchi
(al 5 %),
oppure
2005-2006
4
Ta =
δωn
(al 2 %)
ITSC05 – p. 21/30
Specifiche sul transitorio per sistemi del 2o ordine
• La massima sovraelongazione percentuale dipende unicamente dal
parametro δ.
• Data una specifica sulla sovraelongazione percentuale S% < S̄, è possibile
trovare un δ = δ̄ tale per cui
− √ δ̄π
S̄ = 100e
1−δ̄ 2
• É possibile costruire sul piano s un luogo di punti a δ costante (δ = δ̄) entro
cui devono stare i poli del sistema affinchè la specifica sulla massima
sovraelongazione percentuale sia soddisfatta
Cristian Secchi
2005-2006
ITSC05 – p. 22/30
Specifiche sul transitorio per sistemi del 2o ordine
• Il tempo di assestamento dipende dal parametro δωn = −σ = −Re(pi ).
• Data una specifica sul tempo di assestamento Ta < T̄ , è possibile trovare
un valore δωn = δ̄ ω̄n tale per cui
3
T̄ =
δ̄ ω̄n
• É possibile costruire sul piano s un luogo di punti a δωn costante
(δωn = δ̄ ω̄n ) a sinistra del quale evono stare i poli del sistema affinchè la
specifica sul massimo tempo di assestamento sia soddisfatta.
Cristian Secchi
2005-2006
ITSC05 – p. 23/30
Specifiche sul transitorio per sistemi del 2o ordine
• Tutte queste specifiche hanno ovviamente la loro corrispondenza nel caso
discreto. Le definizioni rimangono le stesse, anche considerando il fatto che
solitamente il sistema controllato (da un controllore digitale) è un sistema
continuo, la cui uscita è quindi qualitativamente simile a quella di un
sistema del 2o ordine.
• Considerando la Z-trasformata della funzione G(s), si possono fare alcune
interessanti considerazioni sull’andamento della risposta in funzione della
posizione dei poli sul piano z, giungendo, come nel caso tempo-continuo,
alla definizione di luoghi a δ costante e a δωn costante sul piano z.
Cristian Secchi
2005-2006
ITSC05 – p. 24/30
Specifiche sul transitorio per sistemi del 2o ordine
Nella figura a sinistra è evidenziata la regione entro la quale devono stare i poli
di un sistema del secondo ordine per soddisfare le specifiche su tempo di
assestamento, massima sovraelongazione percentuale e massimo ωn (legato
alla massima banda passante). Nella figura a sinistra è evidenziata la regione
corrispondente sul piano z.
Cristian Secchi
2005-2006
ITSC05 – p. 25/30
Specifiche frequenziali
Un modo alternativo per esprimere le specifiche dinamiche è quello tramite
specifiche frequenziali, ossia legate ai parametri della funzione di risposta
armonica.
• I tipici parametri considerati sono:
• margini di stabilità (di fase e ampiezza);
• picco di risonanza;
• banda della funzione di risposta armonica in anello chiuso.
• Tramite il prototipo del sistema di secondo ordine, possono sempre essere
legati (in modo approssimato se il sistema è di ordine superiore) ai
parametri della risposta temporale al gradino.
• Nel campo discreto i parametri considerati sono definiti in modo del tutto
analogo.
Cristian Secchi
2005-2006
ITSC05 – p. 26/30
Specifiche frequenziali
• Margine di fase MF : detto −φ l’argomento di G(ejωT ) in corrispondenza
della pulsazione ω0 che fornisce |G(ejω0 T )| = 1, il margine di fase MF è il
complemento a π di φ, cioè
MF = π − φ
Tipici valori di specifica sono 45o ÷ 60o .
• Margine di ampiezza MA : è l’inverso del guadagno di anello alla
pulsazione ω a cui corrisponde la fase π:
MA =
1
|G(ejω T )|
dove arg{G(ejω T )} = π.
Valori usuali di specifica per questo parametro sono 4-6 (12-16 db).
Cristian Secchi
2005-2006
ITSC05 – p. 27/30
Specifiche frequenziali
• Il margine di fase e il margine di ampiezza rappresentano il “grado di
stabilità” del sistema, cioè quanto il sistema è “lontano” dall’instabilità.
• Questo può essere formalmente dimostrato tramite il criterio di Nyquist.
• Imporre un certo valore di questi parametri significa imporre una certa
robustezza al sistema. Questo è utile nel caso il sistema presenti
incertezze oppure dinamiche non modellate.
Cristian Secchi
2005-2006
ITSC05 – p. 28/30
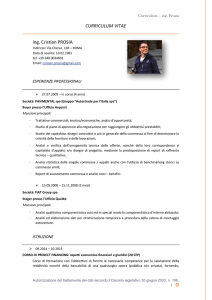
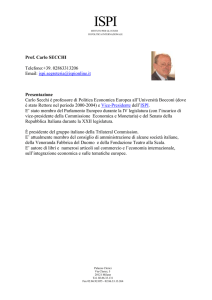
Specifiche frequenziali
• Picco di risonanza |G|r : massimo valore che assume il modulo di |G(ejωT )|
al variare di ω. Esso è funzione del coefficiente di smorzamento secondo la
relazione
1
|G|r = √
2δ 1 − δ 2
Espresso solitamente in decibel, ha valori tipici di 2-3 db.
45
40
35
|G|r (db)
30
25
20
15
10
5
0
0
0.2
0.4
0.6
0.8
1
delta
Cristian Secchi
2005-2006
ITSC05 – p. 29/30
Specifiche frequenziali
• Pulsazione di risonanza ωr : pulsazione alla quale si verifica il picco di
risonanza
ωr = ωn 1 − 2δ 2
• Banda passante ωb : pulsazione alla quale il modulo della funzione di
risposta armonica si riduce di 3 db rispetto al valore del modulo per ω = 0.
Cristian Secchi
2005-2006
ITSC05 – p. 30/30
INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO
Laurea Specialistica in Ingegneria Meccatronica
SPECIFICHE DI PROGETTO
DI SISTEMI DI CONTROLLO
Ing. Cristian Secchi
Tel. 0522 522235
e-mail: [email protected]
http://www.dismi.unimo.it/Members/csecchi