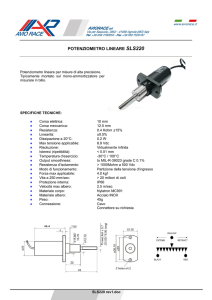
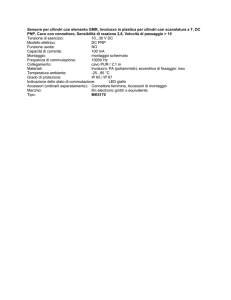
Attuatore elettrico
Cursore guidato
Novità
Motore passo-passo (Servo/24 VDC)
RoHS
Profilo ribassato/piatto Altezza 48 mm
Profilo ridotto grazie al montaggio
laterale del motore
Nessuna interferenza con il motore,
nemmeno con carichi larghi!
Motore
Pezzo
48 mm
115.8 mm
RIDUZIONE
LEL25
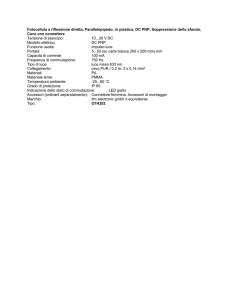
Cursore
Trasmissione a cinghia
LEFB25
Con protezione
cinghia
Corsa max.: 1000 mm
Velocità di traslazione: 1000 mm/s
Disponibile con guida a bronzine e guida a ricircolo di sfere
Modello
LEL25M
LEL25L
Taglia
25
Guida
Corsa [mm]
Carico (orizzontale) [kg]
Velocità [mm/s]
Ripetibilità di posizionamento [mm]
Guida a bronzine
Fino a 1000
3
Fino a 500
±0.1
Guida a ricircolo di sfere
Fino a 1000
5
Fino a 1000
±0.1
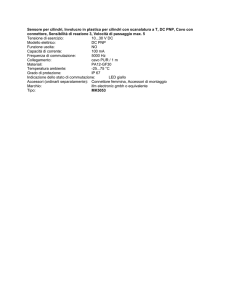
Disponibili 2 tipi di controllori
Tipo programmabile
Serie LECP6
64 punti di posizionamento
Configurazione controllore tramite software
o terminale di programmazione
Tipo a programmazione semplificata
Serie LECP1
14 punti di posizionamento
Configurazione dal pannello di controllo
Serie LEL
CAT.EUS100-101A-IT
Serie LEL
Motore passo-passo (Servo/24 VDC) Tipo
Cursore guidato
Taglia: 25
Costruzione semplice.
È possibile selezionare il tipo di guida.
Corsa max.: 1000 mm
Velocità di traslazione: 1000 mm/s
Meccanismo frenante attivo
senza alimentazione (Su richiesta)
Vite di azionamento
manuale
Capace di trattenere un pezzo
C
Per azionamento manuale del
cursore.
Regolazione possibile in assenza di
alimentazione elettrica
Motore compatibile
Tipo di guida
Motore passo-passo (Servo/24 VDC)
s Guida a bronzine
Carico max.: 3 kg (orizzontale)
Rumorosità ridotta (60 dB max.) Nota)
s Guida a ricircolo di sfere
Carico max.: 5 kg (orizzontale)
Velocità di spostamento: 1000 mm/s
Trasmissione a cinghia
Con protezione
cinghia
Nota) Quando la velocità massima è 500 mm/s
(Misurazione SMC)
Protezione motore
disponibile (Su richiesta)
Disponibili 2 tipi di cavo motore
d d
s CCavo standard
s Cavo robotico (cavo flessibile)
Possibilità di montare i sensori (Esecuzioni speciali)
Per il controllo del segnale limite e intermedio.
Applicabile a D-M9 e D-M9W (LED bicolore)
∗ I sensori vanno ordinati a parte. Per maggiori dettagli, vedere le pag. 8 e 9.
Guida per sensore
Sensore allo stato solido con led bicolore
È possibile impostare la corretta posizione di
montaggio senza errori.
Un led verde si accende in
corrispondenza del campo di
esercizio ottimale.
ON
Campo d'esercizio
OFF
Rosso
Verde
Rosso
Campo d'esercizio ottimale
Sensore
Esempi di applicazione
Trasferimento di carico e scarico
dei pezzi
Pick & place
Applicazioni in cui
lo spazio è limitato
W
Caratteristiche 1
Serie LEF
Configurazione
A carico del cliente
PLC
Alimentazione elettrica
per segnale I/O 24 VDC
Cavo I/O
Pagina 20 e 30
Tipo di controllore
Codice
LEC-CN5-
LECP6
LECP1 (a programmazione semplificata) LEC-CK4-
Controllore
A carico del cliente
Alimentazione
controllore
24 VDC
Tipo programmabile
LECP6
Tipo a programmazione simplificata
LECP1
Pagina 13
Pagina 24
Collegamento alimentazione elettrica
Pagine 16 e 30
Collegamento
Tipo di controllore
LECP6
Connettore di alimentazione (accessorio)
(Tipo programmabile)
LECP1 (Tipo a programmazione simplificata) Cavo di alimentazione (1.5 m) (accessorio)
Kit di impostazione dell'azionamento (su richiesta)
Pagina 21
Kit di impostazione dell'azionamento
(Il cavo di comunicazione, l'unità di conversione e il cavo USB sono compresi.)
Codici: LEC-W2
Cavo di comunicazione
Cavo di collegamento
Pagine 19, 29
Cavo standard
Tipo di controllore
LECP6 (Tipo programmabile) LE-CP--S
LECP1 (Tipo a programmazione simplificata) LE-CP--S
Cavo robotico
LE-CP-
LE-CP-
(3 m)
Unità di conversione
Cavo USB
(Tipo A-mini B)
Cilindri elettrici/
Cursore guidato
PC
Terminale di programmazione (su richiesta)
Cavo motore (Fisso)
Cilindri elettrici
Pagina 22
Pagina 4
o
Codici: LEC-T1-3EG
con cavo da 3 m
Caratteristiche 2
Disponibili 2 tipi di controllori
Tipo (Tipo programmabile)
Serie
LECP6
Facile impostazione
Step Motor
(Servo/24 VDC)
Se si desidera usarlo subito, selezionare
“Easy Mode” (modo semplice).
LECP6
<Utilizzo di un PC>
Software di programmazione controllore
Movimento manuale
È possibile impostare ed eseguire su un'unica
Avvio test
schermata i punti di posizionamento, il
funzionamento di prova, il movimento manuale
e il movimento a velocità costante.
Impostazione punti di
posizionamento
Impostazione
movimento manuale
e velocità costante
<Se si utilizza un terminale di programmazione>
Semplice impostazione e funzionamento.
Scegliere un'icona dalla prima schermata e
Movimento a
velocità costante
Esempio di impostazione punti di posizionamento
Esempio di controllo del display
1° schermata
1° schermata
selezionare una funzione.
Impostare i punti di posizionamento e controllare il display
nella seconda schermata.
2° schermata
2° schermata
Dati
Asse 1
N. di passo
0
Pos.
123.45 mm
Velocità
100 mm/s
Monitor
Asse 1
N. di passo
1
Pos.
12.34 mm
Velocità
10 mm/s
È possibile controllare lo
stato di funzionamento.
Possono essere impostati con “SET” dopo aver inserito i valori.
Display Terminale di programmazione
I dati possono essere impostati con la
posizione e la velocità (le altre condizioni
sono già impostate).
Dati
Asse 1
N. di passo
0
Pos.
50.00 mm
Velocità
200 mm/s
Dati
Asse 1
N. di passo
1
Pos.
80.00 mm
Velocità
100 mm/s
Tipo a programmazione semplificata
Serie LECP1
Possibilità di configurare il funzionamento di un attuatore elettrico
senza l'utilizzo di un PC o di un terminale portatile
Motore passo-passo
(Servo/24 VDC)
LECP1
1 Impostare il numero di posizione
Impostare un numero registrato
per la posizione d'arresto
Massimo 14 punti
2 Impostare una posizione d'arresto
3 Registrazione
Spostare l'attuatore fino ad una posizione
d'arresto usando i pulsanti AVANTI e
INDIETRO
Registrare la posizione
d'arresto usando il pulsante
SET
Velocità /accelerazione
/accelerazione a 16 livelli
Visualizzazione
del numero di
posizione
Caratteristiche 3
Selettore della
posizione
Tasto SET
Pulsanti AVANTI
e INDIETRO
Interruttori di regolazione
della velocità
Interruttori di regolazione
dell'accelerazione
Impostazione parametri standard
Selezionare "Normal mode" quando è richiesta l'impostazione standard.
È possibile impostare nel dettaglio i punti di posizionamento. È possibile impostare i parametri.
È possibile monitorare i segnali e lo stato del terminale.
È possibile eseguire il movimento manuale e il movimento a velocità costante, il ritorno alla posizione di 0 asse e verificare il funzionamento corretto dei segnali I/O.
<Utilizzo di un PC>
Software controllore
L'impostazione punti di posizionamento,
l'impostazione parametro, il monitor,
l'autoapprendimento, ecc., sono indicati
in finestre diverse.
Finestra di impostazione punti
di posizionamento
Finestra di impostazione
parametro
Finestra di monitoraggio
<Se si utilizza un terminale di programmazione>
È possibile salvare sul terminale di programmazione
diversi punti di posizionamento e trasferirli sul
controllore.
Funzionamento di prova continuo fino a 5
punti di posizionamento.
Menù
Asse 1
Punti di posizionamento
Menù
Parametro
N. di passo
Test
Finestra di autoapprendimento
Asse 1
Menù
Asse 1
N. di passo
1
Posizione 123.45 mm
Schermata di impostazione
Monitor di uscitaAsse 1
Arresto
punti di posizionamento
BUSY[ ]
Schermata del test
SVRE[ ]
SETON[ ]
0
Schermata menù principale
Display Terminale di programmazione
Dal menù principale è possibile selezionare
ciascuna funzione (impostazione punti di
posizionamento, test, display, ecc.).
Tipo di operazione
Schermata del monitoraggio
Il cilindro e il controllore vengono forniti in un unico set (è possibile ordinarli anche separatamente).
Verificare che il controllore e il cilindro siano compatibili.
<Prima dell'uso, effettuare i seguenti controlli>
q Controllare che il numero di modello riportato sull'etichetta del cilindro. Corrisponde a quello sull'etichetta del controllore.
w Controllare che la logica dei segnali I/O sia la medesima (NPN o PNP).
Controllore
C
Attuatore
q
w
q
w
Caratteristiche 4
Serie LECP6/LECP1
Funzione
Tipo programmabile
LECP6
Funzione
Impostazione parametri e dati
di posizionamento
Impostazioni dati di
posizionamento
Tipo a programmazione simplificata
LECP1
Immettere il valore numerico dal software di programmazione controllore (PC)
Selezionare mediante i tasti di funzionamento del controllore
Immettere il valore numerico dal terminale di programmazione
Immettere il valore numerico dal software di programmazione controllore (PC)
Insegnamento diretto
Immettere il valore numerico dal terminale di programmazione
Insegnamento JOG
Insegnamento diretto
Insegnamento JOG
Punti di posizionamento
14 punti
64 punti
[IN∗]
Comando di funzionamento (segnale I/O)
Ingresso
Segnale di completamento
Uscita [INP]
punti di posizionamento ⇒ Ingresso [DRIVE]
Ingresso [IN∗] punti di posizionamento
Uscita [OUT∗]
Parametri operativi
TB: Terminale di programmazione PC: Software controllore
Funzione
Descrizione
Tipo
(Tipo programmabile)
LECP6
Accelerazione/decelerazione
Impostazione
Forza di spinta
punti di
posizionamento Livello di trigger
(Estratto) Velocità di spinta
In posizione
Corsa (+)
Impostazione Corsa (–)
parametri ORIG direction
(Estratto)
ORIG speed
PC
TB, PC
×
Valore fisso (ABS)
Impostazione in unità di 0.01 mm.
Insegnamento diretto
Indice di forza durante l'operazione di spinta
Forza target durante l'operazione di spinta
Impostazione in unità di 1%.
×
Velocità durante l'operazione di spinta
Impostazione in unità di 1 mm/s.
×
Selezione tra 16 livelli
Impostazione in unità di 1%.
[Spinta]: Posizione di inizio spinta
Selezione tra 16 livelli
Insegnamento JOG
Condizioni per attivare il segnale in uscita area
Impostazione in unità di 0.01 mm.
×
[Posizione]: larghezza rispetto alla posizione target
[Spinta]: quanto si muove durante la spinta
Impostazione 0.5 mm min.
(Unità: 0.01 mm)
×
Valore fisso
+ limite laterale di posizione
Impostazione in unità di 0.01 mm.
×
×
Valore fisso
– limite laterale di posizione
Impostazione in unità di 0.01 mm.
2
Accelerazione/decelerazione durante il movimento Impostazione in unità di 1 mm/s .
Forza di posizionamento Forza durante l'operazione di posizionamento Impostazione su 100%.
Uscita area
TB
Tipo a programmazione
semplificata
LECP1
Velocità di spostamento
[Posizione]: Posizione target
Posizione
Normal
mode
Impostazione in unità di 1 mm/s.
MOD movimento Selezione della “posizione assoluta” e della “posizione relativa” Impostazione su ABS/INC.
Velocità
Easy
mode
×
×
×
È possibile impostare la direzione di ritorno alla posizione di 0 asse. Compatibile
×
×
Velocità durante il ritorno alla posizione di 0 asse Impostazione in unità di 1 mm/s.
×
×
Impostazione in unità di 1 mm/s2.
×
×
Selezionare tra 3 livelli (basso, medio, alto)
Impostazione non richiesta (stesso valore della forza di spinta)
Valore fisso
Valore fisso
—
Valore fisso
Compatibile
Valore fisso
ORIG ACC
Accelerazione durante il ritorno alla posizione di 0 asse
JOG
È possibile testare il funzionamento continuo alla
velocità impostata quando viene premuto l'interruttore.
MOVE
È possibile testare il funzionamento alla
distanza e velocità impostate dalla posizione corrente.
×
Compatibile
Compatibile
(Funzionamento continuo) Compatibile
Uscita obbligatoria
È possibile testare lo stato ON/OFF del terminale di uscita. Compatibile
×
×
—
DRV mon
È possibile monitorare la posizione
Compatibile
corrente, la velocità corrente, la forza
corrente e i punti di posizionamento specificati.
—
In/Out mon
È possibile monitorare lo stato ON/OFF
Compatibile
corrente del terminale di ingresso e di uscita.
×
×
—
Active ALM
È possibile controllare l'allarme attualmente attivo.
Compatibile
È possibile controllare un allarme attivato in passato. Compatibile
×
×
Compatibile (gruppo allarmi visualizzato)
Registro ALM
File
Save/Load
È possibile salvare, inoltrare e
Compatibile
cancellare tutti i parametri del controllore.
×
×
—
Altre
Language
Disponibile in giapponese e in inglese.
—
Test
Return to ORIG
Test drive
Display
ALM
Caratteristiche 5
Funzionamento dei dati di
movimentazione specificati
Compatibile
Valore fisso
Premere il tasto MANUALE
(
) per l'invio costante
(velocità è un valore specificato)
Premere una volta il tasto MANUALE (
)
per l'operazione di calibratura
(velocità e calibratura sono valori specificati)
Compatibile
—
Varianti della serie
Cilindro elettrico con stelo guidato Serie LEL
Modello
Cuscinetto
Corsa
[mm]
Carico
[kg]
Velocità
[mm/s]
Ripetibilità di
posizionamento
[mm]
LEL25M
Guida a
bronzine
Fino a 1000
3
Fino a 500
±0.1
Serie
controllore
Pagina di
riferimento
Serie
LECP6
Pagina 1
LEL25L
Guida a
ricircolo
di sfere
Serie
LECP1
Fino a 1000
5
Fino a 1000
±0.1
Controllore LEC
Tipo
Terminale di
programmazione
Serie
Motore
Tensione
compatibile d'alimentazione
Ingresso/uscita paralleli
Ingresso
Uscita
Numero di Pagina di
posizionamenti riferimento
Tipo
programmabile
LECP6
Motore passo-passo 24 VDC
(Servo/24 VDC) ±10%
11 ingressi
(Isolamento
fotoaccoppiatore)
13 uscite
(Isolamento
fotoaccoppiatore)
Tipo a
programmazione
semplificata
LECP1
Motore passo-passo 24 VDC
(Servo/24 VDC) ±10%
6 ingressi
(Isolamento
fotoaccoppiatore)
6 uscite
(Isolamento
fotoaccoppiatore)
64
Pagina 13
14
Pagina 24
LECP6
LECP1
Introduzione 1
SMC
Con stelo
Electric Actuator
Rod Type
New
Guide Rod Type
Servo Motor (24 VDC) Type
Step Motor (Servo/24 VDC)
Rod Type
LEY
Series
Size: 16, 25, 32
Long stroke:
Max. 500 mm (LEY32)
New
Mounting variations
*Direct mounting: 3 directions, Bracket mounting: 3 types
*Auto switch can be mounted.
*Speed control/Positioning: Max. 64 points
*Positioning and pushing control can be selected.
Guide Rod Type
Rod Type/
In-line Motor Type
Rod Type
Possible to hold the actuator when pushing the rod to a workpiece, etc.
LEYG
Series
Motore passo-passo (Servo/24 VDC)
Tipo Base
Serie LEY
Servomotore (24 VDC)
Tipo con motore in linea
Serie LEYD
Stelo guidato
Serie LEYG
Tipo con motore in linea
/Stelo guidato
Serie LEYGD
Size: 16, 25, 32
Lateral end load: 5 times more
Compared with rod type, size 25 and 100 stroke
New
Compatible with slide-bearing and
ball-bushing bearing.
Compatible with moment load and
stopper (slide bearing).
New
*Speed control/Positioning: Max. 64 points
*Positioning and pushing control can be
selected.
Possible to hold the actuator when pushing the rod
to a workpiece, etc.
AC Servo Motor (100/200 W)
Rod Type
Guide Rod Type
Guide Rod Type/
In-line Motor Type
Type
LEY
Series
New
New
Rod Type/
In-line Motor Type
Rod Type
Servo Motor (24 VDC) Controller
Step Motor (Servo/24 VDC)
Step Data Input Type
Series LECP6/LECA6
Taglia
Size: 25, 32
*High output motor (100/200 W)
*Improved high speed transfer abitity
*High acceleration compatible (5,000 mm/s2)
*Pulse input type
*With internal absolute encoder
(LECSB specifications)
AC Servo Motor Controller
New Programless Type
Series LECP1
*64 positioning points
*Teaching box, controller
setting kit input
New AC Servo Motor Controller
Series LECSA/LECSB
*Pulse input type
*Absolute encoder
(LECSB)
*Built-in positioning function
(LECSA)
*14 positioning points
*Control panel setting
Series LEY
CAT.ES100-83C
16
25
32
Corsa
30 a 300
30 a 400
30 a 500
Taglia
Corsa
30 a 300
30 a 400
30 a 500
16
25
32
Taglia
Corsa
30 a 200
30 a 300
30 a 300
16
25
32
Taglia
16
25
32
CAT.ES100-83
Con stelo
Electric Actuator
Rod Type
New
Guide Rod Type
Servo Motor (24 VDC) Type
Step Motor (Servo/24 VDC)
Rod Type
LEY
Series
Size: 16, 25, 32
Long stroke:
Max. 500 mm (LEY32)
New
Mounting variations
*Direct mounting: 3 directions, Bracket mounting: 3 types
*Auto switch can be mounted.
*Speed control/Positioning: Max. 64 points
*Positioning and pushing control can be selected.
Guide Rod Type
Rod Type/
In-line Motor Type
Rod Type
Possible to hold the actuator when pushing the rod to a workpiece, etc.
LEYG
Series
Corsa
30 a 200
30 a 300
30 a 300
Servomotore AC (100/200 W)
Tipo Base
Serie LEY
Tipo con motore in linea
Serie LEYD
Size: 16, 25, 32
Lateral end load: 5 times more
Compared with rod type, size 25 and 100 stroke
New
Compatible with slide-bearing and
ball-bushing bearing.
Compatible with moment load and
stopper (slide bearing).
New
*Speed control/Positioning: Max. 64 points
*Positioning and pushing control can be
selected.
Possible to hold the actuator when pushing the rod
to a workpiece, etc.
AC Servo Motor (100/200 W)
Rod Type
Series
Guide Rod Type
Guide Rod Type/
In-line Motor Type
Type
LEY
New
New
Rod Type/
In-line Motor Type
Rod Type
Servo Motor (24 VDC) Controller
Step Motor (Servo/24 VDC)
Step Data Input Type
Series LECP6/LECA6
Taglia
Size: 25, 32
*High output motor (100/200 W)
*Improved high speed transfer abitity
*High acceleration compatible (5,000 mm/s2)
*Pulse input type
*With internal absolute encoder
(LECSB specifications)
AC Servo Motor Controller
New Programless Type
Series LECP1
New AC Servo Motor Controller
Series LECSA/LECSB
*14 positioning points
*Control panel setting
*64 positioning points
*Teaching box, controller
setting kit input
*Pulse input type
*Absolute encoder
(LECSB)
*Built-in positioning function
(LECSA)
25
32
Corsa
30 a 400
30 a 500
Taglia
Corsa
30 a 400
30 a 500
25
32
Series LEY
CAT.ES100-83C
CAT.ES100-83
Cilindri senza stelo
Electric Actuator
New
Slider Type
RoHS
Servo Motor (24 VDC) Type
New Size
Series LEFS
60 kg
Size: 16, 25, 32, 40
0.02 mm
40 added!
Series LEFB
Belt Drive
Size: 16, 25, 32
2000 mm
2000 mm/s
Max. stroke:
Transfer speed:
Trasmissione a vite
Serie LEFS
Taglia
AC Servo Motor (100/200/400 W) Type
Ball Screw Drive
Series LEFS
)High output motor (100/200/400 W)
)Improved high speed transfer ability
)High acceleration compatible (5,000 mm/s2)
)Pulse input type
)With internal absolute encoder
(LECSB specifications)
Size: 25, 32, 40
New
Servo Motor (24 VDC) Controller
Step Motor (Servo/24 VDC)
Step Data Input Type
Series LECP6/LECA6
AC Servo Motor
New Programless Type
Series LECP1
Controller
New AC Servo Motor Controller
Series LECSA/LECSB
)14 positioning points
)Control panel setting
)64 positioning points
)Teaching box, controller
setting kit input
)Pulse input type
)Absolute encoder
(LECSB)
)Built-in positioning function
(LECSA)
Series LEF
CAT.ES100-87C
CAT.ES100-87
16
25
32
40
Cursore guidato
Electric Actuator
Guide Rod Slider
New
Step Motor (Servo/24 VDC)
RoHS
Low-profile/Flat Height 48 mm
Profile reduced by side
mounting of motor
No interference with motor,
even with large workpieces!
Motor
Workpiece
48 mm
115.8 mm
DOWN
LEL25
With belt cover
Max. stroke: 1000 mm
Transfer speed: 1000 mm/s
Compatible with sliding bearing and ball bushing bearing
Model
LEL25M
LEL25L
Size
25
Bearing
Stroke [mm]
Trasmissione a cinghia
Serie LEL
Taglia
Corsa
25
100 a 1000
Sliding bearing
Up to 1000
3
Ball bushing bearing
Up to 1000
5
*64 points positioning
*Input using controller setting kit or
teaching box
Corsa
30 a 1000
30 a 2000
30 a 2000
16
25
32
Trasmissione a vite
Serie LEFS
Taglia
Electric Slide Table
Step Motor (Servo/24 VDC)
New
RoHS
Servo Motor (24 VDC)
Symmetrical type (L type) and In-line motor type (D type)
newly added to electric slide table basic type (R type).
Improved mounting flexibility!
New
New
Corsa
30 a 600
30 a 800
30 a 1000
25
32
40
Unità di traslazione
Symmetrical Type (L Type)
$Compact,
Motore passo-passo (Servo/24 VDC)
Tipo Base (Tipo
Serie LESHR
R)
Servomotore (24 VDC)
Tipo simmetrico (Tipo L)
Serie LESHL
Tipo con motore in linea (Tipo D)
Serie LESHD
In-line Motor Type (D Type)
Space-saving
$Maximum
pushing force: 180 N
61% reduction in volume
For R/L type
(compared to the SMC conventional products)
$Reduced
cycle time
Max. acceleration/deceleration: 5,000 mm/s2
Max. speed: 400 mm/s
$Positioning
Symmetrical Type (L Type)
Series LESH;L
Up to 500
p0.1
Up to 1000
p0.1
Offering 2 types of controller
Step Data Input Type
Series LECP6/LECA6
Programless type
Series LECP1
*64 positioning points
*Teaching box, controller setting kit input
*14 points positioning
*Control panel setting
In-line Motor Type (D Type)
Series LESH;D
New
Programless Type
Series LECP1
*14 positioning points
*Control panel setting input
Series LES
Series LEL
CAT.ES100-101A
CAT.ES100-101
Introduzione 2
Taglia
Corsa
Taglia
Corsa
Taglia
Corsa
8
16
25
50, 75
50, 100
50, 100, 150
8
16
25
50, 75
50, 100
50, 100, 150
8
16
25
50, 75
50, 100
50, 100, 150
repeatability: ±0.05 mm
Built-in motor
124.5
LESH8 R/L 50 mm stroke
Basic Type (R Type)
Series LESH;R
Work load: (Horizontal) [kg] Speed [mm/s] Positioning repeatability [mm]
Offering 2 types of controller
Step data input type
Series LECP6
Motore passo-passo (Servo/24 VDC)
Taglia
Servomotore AC (100/200/400 W)
Table
Belt drive
LEFB25
Corsa
30 a 400
30 a 600
30 a 800
30 a 1000
Trasmissione a cinghia
Serie LEFB
36
Ball Screw Drive
Max. work load:
Positioning repeatability: ±
Servomotore (24 VDC)
58.5
Step Motor (Servo/24 VDC)
Motore passo-passo (Servo/24 VDC)
CAT.ES100-78D
CAT.ES100-78
Attuatori elettrici
Compatti
Electric Actuators
Miniature Rod Type
Con stelo
Serie LEPY
New
Miniature Slide Table Type
RoHS
Step Motor (Servo/24 VDC)
Compact and
lightweight
#Maximum pushing force: 50 N
#Positioning repeatability: p0.05 mm
#Possible to set position, speed and force.
(64 points)
Rod Type Series LEPY
Weight
Microslitta
Serie LEPS
Electric Rotary Table
New
Step Motor (Servo/24 VDC)
Low
profile
240 g
RoHS
Basic type
H
Size: 6, 10
Unità rotanti
Motore passo-passo (Servo/24 VDC)
[mm]
Model
H
LER10
LER30
LER50
42
Spacesaving
53
68
Hollow shaft axis
High precision type [mm]
Accommodates
wiring and piping
of work pieces.
Model
H
LERH10
LERH30
LERH50
49
Motore passo-passo (Servo/24 VDC)
Tipo Base
Serie LER
Modello ad alta precisione
Serie LERH
Motor built-in
62
Space-saving
78
LEPY6<-25
30 mm
Taglia
6
10
6 mm
125.
.5
20
mm
Slide Table Type Series LEPS
Weight
Size: 6, 10
290 g
LEPS6<-25
Linear guide integrated
41 mm
21
6 mm
138.
mm
Offering 2 types of controller
Step data input type
Series LECP6
Corsa
Corsa
Taglia
6
10
25, 50, 75
Taglia Angolo di rotazione [°]
Max. speed: 420°/sec (7.33 rad/sec)
Max. acceleration/deceleration: 3,000°/sec2 (52.36 rad/sec2)
Positioning repeatability: ±0.05°
Repeatability at the end: ±0.01° (Pushing control/with external stopper)
25, 50
Possible to set speed, acceleration/deceleration, and position. Max. 64 points
Energy-saving
Step Data Input Type
Series LECP6
*64 positioning points
*Teaching box, controller
setting kit input
High torque
0.2
0.3
0.8
1.2
6.6
10
50
Basic High torque
420
280
Basic
High torque
±0.05
(End: ±0.01)
Value when an external stopper is mounted.
New
Programless Type
Series LECP1
*14 positioning points
*Control panel setting
CAT.ES100-94B
CAT.ES100-92A
Pinze
310, 180, 90
10
30
50
320, 180, 90
10
30
50
310, 180, 90
320, 180, 90
CAT.ES100-94
Motore passo-passo (Servo/24 VDC)
Electric Grippers
New
RoHS
Step Motor (Servo/24 VDC)
2-finger type with dust cover is
added to electric grippers!
Basic
30
Series LER
Series LEPY/LEPS
New
Rotating torque [N·m] Max. speed [°/s] Positioning repeatability [°]
10
Automatic 40% power reduction after the table has stopped.
Offering 2 types of controller
*14 points positioning
*Control panel setting
CAT.ES100-92
$ Drop prevention function is provided.
(Self-lock mechanism is provided for all series.)
Gripping force of the work pieces is maintained when stopped or restarted.
The work pieces can be removed by hand.
$ Energy-saving
Sealed-construction dust cover
Size
Rotation angle
320° (310°), 180°, 90°
The value indicated in brackets shows the value for the LER10.
Programless type
Series LECP1
*64 points positioning
*Input using controller setting kit or
teaching box
Taglia Angolo di rotazione [°]
Shock-less/high speed actuation
Power consumption reduced by self-lock mechanism
(Equivalent to IP50)
$ Compact body sizes and long stroke variations
$ Prevents machining chips, dust, etc.,
from getting inside
$ Prevents spattering of grease, etc.
$ Gripping check function is provided.
Can achieve the gripping force equivalent to the widely used air grippers.
Tipo Z (2 dita)
Serie LEHZ
Con protezione antipolvere
Serie LEHZJ
Tipo F (2 dita)
Tipo S (3 dita)
Serie LEHF
Serie LEHS
Identify work pieces with different dimensions/detect
mounting and removal of the work pieces.
$ Possible to set position, speed and force.
(64 points)
Z Type (2 fingers)
ZJ Type (2 fingers)
Compact and light, various gripping forces
Size
Stroke/
both sides
[mm]
10
4
New With dust cover (Equivalent to IP50)
Three types of cover material (Finger portion only)
Series LEHZ
Gripping force [N]
Basic
6 to 14
Series LEHZJ
Compact
2 to 6
16
6
20
10
25
14
16 to 40
11 to 28
32
22
52 to 130
—
40
30
84 to 210
—
Size
3 to 8
F Type (2 fingers)
10
Gripping force [N]
Basic
4
16
6 to 14
6
20
10
25
16 to 40
14
Compact
3 to 6
4 to 8
Series
Stroke/
Gripping force
both sides
[N]
[mm]
Size
Stroke/
diameter
[mm]
Basic
Compact
1.4 to 3.5
9 to 22
7 to 17
36 to 90
—
20
48 to 120
32
8
40 (80)
72 to 180
40
12
52 to 130
—
16 (32)
Corsa di apertura/ chiusura
Corsa
Taglia
Corsa di apertura/ chiusura
Corsa
Taglia
Corsa di apertura/ chiusura
Corsa
Taglia
Corsa di apertura/ chiusura
Corsa
4
6
10
14
22
30
10
16
20
25
4
6
10
14
10
20
32
40
16 (32)
24 (48)
32 (64)
40 (80)
10
20
32
40
4
6
8
12
Gripping force [N]
2.2 to 5.5
10
32 (64)
40
24 (48)
10
16
20
25
32
40
LEHS
3 to 7
11 to 28
32
20
Taglia
11 to 28
Can hold round work pieces.
Series LEHF
Size
Stroke/
both sides
[mm]
10
S Type (3 fingers)
Long stroke, can hold various types of work pieces.
4
6
( ): Long stroke
Offering 2 types of controller
Step Data Input Type
Series LECP6
*64 positioning points
*Teaching box, controller
setting kit input
New
Programless Type
Series LECP1
*14 positioning points
*Control panel setting
Series LEH
CAT.ES100-77D
CAT.ES100-77
Controllori
Tipo programmabile
Per motore passo-passo
Serie LECP6
Tipo programmabile
Per servomotore
Serie LECA6
Tipo a programmazione
semplificata
Serie LECP1
Tipo di motore
Tipo di motore
Tipo di motore
Motore passo-passo
(Servo/24 VDC)
Servomotore
(24 VDC)
Motore passo-passo
(Servo/24 VDC)
Controllore servomotore AC
Servo-controllore per
motore AC
Tipo incrementale
Serie LECSA
Servo-controllore per
motore AC
Tipo assoluto
Serie LECSB
Tipo di motore
Tipo di motore
Servomotore AC
(100/200 VAC)
Servomotore AC
(100/200 VAC)
Introduzione 3
Introduzione 4
Selezione del modello
Selezione del modello
Serie LEL
…………………………………………………………………… Pagina
1
Codici di ordinazione ……………………………………………………………………… Pagina 4
Specifiche
……………………………………………………………………………………… Pagina
Costruzione
…………………………………………………………………………………… Pagina
5
6
LEL
Attuatore elettrico/Cursore stelo guidato
Motore passo-passo (Servo/24 VDC)
Motore passo-passo (Servo/24 VDC)
………………………………………………………………………………………… Pagina
Precauzioni specifiche del prodotto
……………………………………………… Pagina
8
10
LECP1
Sensore
LECP6
Dimensioni ……………………………………………………………………………………… Pagina 7
Controllore motore passo-passo (Servo/24 VDC)
Kit di impostazione controllore/LEC-W2………………………………………… Pagina 21
Terminale di programmazione/LEC-T1
………………………………………… Pagina
22
Tipo a programmazione semplificata/Serie LECP1 ………………………… Pagina 24
Introduzione 5
Precauzioni specifiche
del prodotto
Tipo programmabile/Serie LECP6 …………………………………………………… Pagina 13
Cilindro elettrico con stelo guidato
Serie
Motore passo-passo (Servo/24 VDC)
LEL
Selezione del modello
Procedura di Selezione
Passo 1
Controllare carico –
velocità.
Controllare la durata
del ciclo.
Passo 2
Passo 3 Controllare il momento
ammissibile.
Esempio selezione
3HVRGHOSH]]R>NJ@
&RQGL]LRQHGLPRQWDJJLRSH]]R
Accelerazione/decelerazione: 3000 [mm/s2]
100
9HORFLWj>PPV@
W
&RUVD>PP@
Direzione di montaggio: orizzontale verso l'alto
Passo 1 Controllare carico – velocità. <Grafico velocità-carico> (Pagine 2 e 3)
Carico orizzontale: W [kg]
Condizioni
di esercizio
Selezionare il modello target in base al peso del pezzo e alla velocità consultando il
grafico velocità–carico.
Esempio di selezione) LEL25LT-500 è temporaneamente selezionato in base al
grafico a destra.
6
LEL25L
4
2
0
0
500
1000
Velocità: V [mm/s]
<Grafico velocità-carico>
(LEY25L/motore passo-passo)
Calcolare la durata del ciclo attraverso
il seguente metodo di calcolo.
Durata del ciclo:
È possibile ricavare T dalla seguente equazione.
T = T1 + T2 + T3 + T4 [s]
T1:
Tempo di accelerazione e T3: È
possibile ricavare il tempo di decelerazione dalla seguente equazione.
T1 = V/a1 [s]
T3 = V/a2 [s]
T2:
È possibile ricavare il tempo della velocità
costante dalla seguente equazione.
L – 0.5 · V · (T1 + T3)
T2 =
[s]
V
T4:
Il tempo di assestamento varia a
seconda delle condizioni quali il tipo di
motore, il carico e il posizionamento
dei dati di movimentazione. Pertanto,
calcolare il tempo di assestamento in
riferimento al seguente valore.
Esempio di calcolo)
Di seguito viene indicato come calcolare il
tempo da T1 a T4.
T1 = V/a1 = 300/3000 = 0.1 [s],
T3 = V/a2 = 300/3000 = 0.1 [s]
L – 0.5 · V · (T1 + T3)
T2 =
V
T4 = 0.3 [s]
Quindi, si ricava la durata del ciclo nel
seguente modo.
Mep
= 0.1 + 1.57 + 0.1 + 0.3
= 2.07 [s]
m
L2
500 mm max.
400
300
600 mm
200
100
a2
Tempo
[s]
700 mm
800 mm
900 mm
1000 mm
0
0
1
2
3
4
5
Peso del pezzo [kg]
In base al risultato del calcolo indicato sopra, è selezionato il modello LEL25LT-500.
1
T2
T3
T4
T1 : Tempo di accelerazione [s
Tempo trascorso fino al
raggiungimento della velocità
impostata
T2 : Tempo velocità costante [s]
Tempo durante il quale l'attuatore
funziona ad una velocità costante
T3 : Tempo di decelerazione [s]
Tempo trascorso dall'inizio
dell'arresto del funzionamento a
velocità costante
T4: Tempo di assestamento [s]
Tempo trascorso fino al
completamento del posizionamento
T = T1 + T2 + T3 + T4
Braccio: L2 [mm]
Passo 3 Controllare il momento guida.
a1
L : Corsa [mm]
··· (Condizione di esercizio)
V : Velocità [mm/s]
··· (Condizione di esercizio)
a1 : Accelerazione [mm/s2]
··· (Condizione di esercizio)
a2 : Decelerazione [mm/s2]
··· (Condizione di esercizio)
500 – 0.5 · 300 · (0.1 + 0.1)
300
= 1.57 [s]
500
L
T1
=
T4 = 0.3 [s]
Velocità: V [mm/s]
Passo 2 Controllare la durata del ciclo.
Serie LEL
Selezione del modello
Selezione del modello
Direzione di sporgenza del carico
Modello
m L1
200
Corsa 900 mm
150
Corsa 1000 mm
100
50
0
0
1
2
3
Carico [kg]
4
Montaggio orizzontale
Corsa 500 mm max.
250
Corsa 600 mm
Corsa 700 mm
Corsa
800 mm
200
150
100
900 mm
50 Corsa
0
5
Corsa 1000 mm
0
1
2
3
Carico [kg]
500
500
Braccio: L2 [mm]
Braccio: L2 [mm]
m
L2
400
300
Corsa 1000 mm
200
100
4
5
Corsa 500 mm max.
Corsa 900 mm max.
400
300 Corsa
600 mm
Corsa
700 mm
200 Corsa
800 mm
100 Corsa 900 mm
Corsa 1000 mm
0
5
250
200
Braccio: L3 [mm]
300
250
Corsa 600 mm max.
150
100
50
0
1
2
3
Carico [kg]
4
50
0
0
1
2
3
Carico [kg]
4
400
300
Braccio: L6 [mm]
Corsa 600 mm max.
200
100
0
L6 m
Braccio: L5 [mm]
Braccio: L5 [mm]
L5
2
3
Carico [kg]
4
5
Corsa 500 mm max.
150
100
Corsa 600 mm
50
0
0
1
2
3
Carico [kg]
4
400
1
2
3
Carico [kg]
4
5
4
5
Corsa 600 mm
200
100
0
5
300
250
250
200
Corsa 600 mm max.
150
100
50
0
1
2
3
Carico [kg]
4
5
Corsa 500 mm max.
300
300
0
1
500
500
m
0
200
0
5
Corsa 500 mm max.
Corsa 600 mm
250
100
5
50
300
Corsa 600 mm max.
4
100
250
150
2
3
Carico [kg]
150
300
200
1
200
0
5
0
LECP6
4
LECP1
2
3
Carico [kg]
Precauzioni specifiche
del prodotto
Braccio: L4 [mm]
1
300
0
m L4
0
Braccio: L4 [mm]
Braccio: L3 [mm]
0
L3 m
Montaggio a parete
300
Corsa 800 mm max.
250
Braccio: L1 [mm]
Braccio: L1 [mm]
300
LEL25L
LEL
LEL25M
Motore passo-passo (Servo/24 VDC)
m: Carico [kg]
L: Sporgenza dal baricentro del carico [mm]
Braccio: L6 [mm]
Direzione di montaggio
Momento dinamico ammissibile
0
1
2
3
Carico [kg]
Corsa 500 mm max.
200
150
100
Corsa 600 mm
50
0
0
1
2
3
Carico [kg]
4
5
2
Serie
LEL
∗ Questi grafici mostrano il valore ammissibile solo per l'attuatore.
Per le applicazioni in cui è montata una guida esterna, contattare SMC.
Grafico guida velocità–carico
LEL25L
Carico orizzontale: W [kg]
Carico orizzontale: W [kg]
LEL25M
6
4
2
0
0
6
4
2
0
500
1000
0
500
Velocità: V [mm/s]
Spostamento cursore (valore di riferimento)
1000
Velocità: V [mm/s]
∗ Spostamento del cursore quando il baricentro del carico si trova al centro
dell'unità nel mezzo della corsa.
W
Baricentro del carico situato al centro del cursore
0.4
Corsa 1000 mm
Spostamento [mm]
W
0.3
Corsa 300 mm
Corsa 800 mm
0.2
0.1
Corsa 500 mm
0.0
0
10
20
30
40
50
Carico W [N]
Spostamento cursore (valore di riferimento)
∗ Spostamento quando il carico è sbilanciato di “L” dal centro del cursore.
L W
L = 25 mm
Baricentro del carico situato a una posizione di sbilanciamento quando L = 25 mm
0.4
L
W
Spostamento [mm]
Corsa
1000 mm
Corsa 800 mm
0.3
0.2
Corsa 500 mm
0.1
Corsa 300 mm
0.0
0
10
20
30
Carico W [N]
3
40
50
Serie LEL
RoHS
LEL25
Codici di ordinazione
w Tipo di guida
M
L
25
y u
o !0
i
!1
e Passo equivalente r Corsa
T
Guida a bronzine
Guida a ricircolo di sfere
100
48 mm
t Opzione motore
100 mm
a
1000 mm
a
1000
—
B
C
∗ Consultare la tabella
corse applicabili.
u Lunghezza cavo cilindro [m]
y Tipo di cavo cilindro∗
—
—
Senza cavo
Cavo standard
Cavo robotico (cavo flessibile)
S
R
Senza cavo
1.5
3
5
1
3
5
8
A
B
C
∗ Realizzato su richiesta (solo cavo robotico)
Consultare le specifiche Nota 2) a pagina 5.
o Lunghezza cavo I/O [m]
!0 Montaggio controllore
—
Senza cavo
1.5∗
3∗
5∗
1
3
5
—
—
6N
6P
1N
1P
Senza controllore
LECP6
(Tipo cprogrammabile)
LECP1
(Tipo a programmazione semplificata)
NPN
PNP
NPN
PNP
∗ Per maggiori dettagli sui controllori e i motori compatibili,
consultare i controllori compatibili indicati sotto.
!1 Esecuzioni speciali
—
Montaggio con viti
1
Montaggio guida DIN∗
D
∗ Se si seleziona [Con freno],
non è possibile selezionare
[Con protezione motore].
i Tipo di controllore∗
8∗
10∗
15∗
20∗
∗ Il cavo standard deve essere usato su parti
fisse. Per l'uso su parti mobili, selezionare il
cavo robotico.
Senza opzione
Con freno
Con protezione motore∗
Prodotto standard
Con magnete/guida sensore
X5
∗ 1 Disponibile solo per i tipi di controllore “6N” e “6P”
∗ 2 La guida DIN non è compresa. Ordinarla a parte.
Precauzioni specifiche
del prodotto
q Taglia
t
r
LECP6
q w e
1 6P 1
∗ Quando si seleziona “Senza controllore” per i
tipi di controllore, non è possibile selezionare
la lunghezza del cavo I/O.
KStandard/K Realizzato su richiesta
Tabella corse applicabili
Corsa
Modello
LEL25
Controllori compatibili
100 200 300 400 500 600 700 800 900 1000
K
K
K
K
K
K
K
K
K
Il cilindro e il controllore sono forniti insieme (set).
(Controllore → Pagina 13)
Tipo
programmabile
K
Tipo a programmazione
semplificata
Tipo
Verificare che il controllore e il cilindro siano compatibili.
<Prima dell'uso, effettuare i seguenti controlli>
q Controllare che il numero di modello riportato sull'etichetta
del cilindro corrisponda a quello sull'etichetta del controllore.
w Controllare che la logica dei segnali I/O sia la medesima
(NPN o PNP).
Serie
Caratteristiche
Motore compatibile
q
w
∗ Consultare il manuale di funzionamento per usare questo prodotto.
Scaricarlo dal nostro sito web http://www.smcworld.com
Max. numero di punti
di posizionamento
Tensione d'alimentazione
Pagina di riferimento
LECP6
LECP1
Inserimento valore
Controllore standard
Possibilità di configurare il
funzionamento senza l'utilizzo
di un PC o di un terminale portatile
Motore passo-passo
(Servo/24 VDC)
14 punti
64 punti
24 VDC
Pagina 13
LECP1
LEL 25 M T 100
LEL
(Servo/24 VDC)
Motore passo-passo (Servo/24 VDC)
Selezione del modello
Cilindro elettrico con cursore guidato
Trasmissione a cinghia Motore passo-passo
Pagina 24
4
Serie LEL
Specifiche
Motore passo-passo (Servo/24 VDC)
LEL25M
Modello
Corsa
Carico [kg] Nota 2)
Specifiche attuatore
LEL25L
(100), (200), 300, 400, 500, 600
(700), (800), (900), (1000)
[mm] Nota 1)
Orizzontale (montaggio parete)
Velocità [mm/s] Nota 2)
3 (2,5)
5 (5)
48 a 500
48 a 1000
Max. accelerazione/decelerazione [mm/s2]
3000
Ripetibilità di posizionamento [mm]
±0,1
48
Passo equivalente [mm]
Resistenza a urti/vibrazioni [m/s2] Nota 3)
50/20
Cinghia
Funzionamento
Guida a bronzine
Tipo di guida
Guida a ricircolo di sfere
Forza esterna ammissibile [N] Nota 4)
5
48 a 40
Campo della temperatura [°C]
90 max. (senza condensazione)
Specifiche elettriche
Campo umidità d'esercizio [%UR]
Taglia motore
42
Tipo di motore
Motore passo-passo (Servo/24 VDC)
Fase A/B incrementale (800 impulsi/giro)
Encoder
24 VDC ±10%
Tensione nominale [V]
Assorbimento [W] Nota 5)
32
Assorbimento in standby durante il funzionamento [W] Nota 6)
16
Assorbimento max. momentaneo [W] Nota 7)
60
LECP6: 0.15 (montaggio con viti), 0.17 (montaggio su guida DIN), LECP1: 0,13
Freno attivo senza alimentazione
Specifiche
del freno
Peso del controllore [kg]
Tipo Nota 8)
19
Forza di tenuta [N]
Assorbimento [W] Nota 9)
5
24 VDC ±10%
Tensione nominale [V]
Nota 1) Le corse indicate tra ( ) si realizzano su richiesta.
Nota 2) La velocità cambia in base al carico. Consultare “Grafico guida velocità–carico” a pagina 3. Il carico cambia in base alla corsa e alle condizioni di montaggio.
Consultare il grafico “Momento dinamico ammissibile” a pagina 2. Inoltre, se la lunghezza del cavo supera i 5 m, diminuirà al massimo del 10% per ogni 5 m.
Nota 3) Resistenza all'urto: non si sono verificati malfunzionamenti durante il test d'urto dell'attuatore sia in direzione della corsa che in direzione
perpendicolare alla corsa. (Il test è stato eseguito con il cilindro in stato iniziale).
Resistenza alle vibrazioni: non si sono verificati malfunzionamenti durante il test dell'attuatore tra 45 e 2000 Hz sia in direzione della corsa che in
direzione perpendicolare alla corsa. (Il test è stato eseguito con il cilindro in stato iniziale).
Nota 4) La resistenza esterna ammissibile è la resistenza consentita quando si usa un tubo mobile flessibile o un prodotto simile.
Nota 5) L'assorbimento (compreso il controllore) si riferisce solo a quando il cilindro è in funzione.
Nota 6) L'assorbimento in standby in funzionamento (compreso il controllore) si riferisce solo a quando il cilindro si arresta nella posizione impostata
durante il funzionamento.
Nota 7) L'assorbimento max. momentaneo (compreso il controllore) si riferisce solo a quando il cilindro è in funzione. Questo valore può essere usato per
selezionare l'alimentazione elettrica.
Nota 8) Solo con freno
Nota 9) Per un attuatore con freno, aggiungere l'assorbimento per il freno.
Peso dell'attuatore
Corsa [mm]
Peso [kg]
5
LEL25M
LEL25L
(100)
2,13
(200)
2,47
300
2,82
400
3,17
500
3,52
2,38
2,72
3,07
3,42
3,77
Peso aggiuntivo con freno [kg]
0,26
Peso aggiuntivo con protezione [kg]
0,04
600
3,87
(700)
4,21
(800)
4,56
(900)
4,91
(1000)
5,26
4,12
4,47
4,82
5,17
5,52
Serie LEL
Costruzione
A
e
Opzione motore:
Con protezione motore
q
y
w
Motore passo-passo (Servo/24 VDC)
A
r
@2
Opzione motore:
Con freno
!2
!7
!4
u
!3
LEL
Selezione del modello
Attuatore elettrico/Cursore guidato
A-A (LEL25LT-)
LECP6
!1 i
!7
A-A (LEL25MT-)
!9
LECP1
!9
t
@1
!8
@0
!5
Precauzioni specifiche
del prodotto
!6 o !0
Componenti
Descrizione
N.
Materiale
Nota
1
Cursore
Lega di alluminio
Anodizzato
2
Piastra terminale lato motore
Lega di alluminio
Anodizzato
3
Piastra terminale
Lega di alluminio
Anodizzato
4
Montaggio motore
Alluminio pressofuso
Verniciatura
5
Supporto puleggia
Lega di alluminio
6
Protezione cinghia
Lega di alluminio
Anodizzato
7
Stelo guidato
Acciaio al carbonio
Anodizzato cromo duro
8
Supporto cinghia A
Acciaio al carbonio
Cromato
9
Puleggia
10
Distanziale
Lega di alluminio
11
Supporto cinghia B
Lega di alluminio
12
Piastra di tensionamento
Lega di alluminio
Anodizzato
13
Protezione motore
Resina sintetica
Solo “Con protezione motore”
14
Grommet
Resina sintetica
Solo “Con protezione motore”
15
Puleggia motore
Lega di alluminio
Anodizzato
16
Puleggia terminale
Lega di alluminio
Anodizzato
17
Motore
—
18
Cinghia
—
Boccola
—
Guida a ricircolo di sfere
—
20
Cuscinetto
—
21
Cuscinetto
22
Vite esagonale
19
Acciaio inox
—
Acciaio al carbonio
Cromato
6
Serie LEL
Dimensioni
LEL25M
LT
L
B (Distanza carrello)
(C)
(115)
C
Corsa
[D]
D
[Posizione di asse 0] Nota 3)
Posizione di asse 0 Nota 2)
10.4
28
10.4
(40)
46.5
48
43.4
35.5
28
56
(46.5)
(48)
(4)
Con guida sensore
A
8
4 H9 (
prof. 4
+0.030
0
)
Superficie di montaggio sensori
Cavo motore
(2 x ø5)
3.45
5
20
16.1
20
8
(48)
(4)
115
110.8
6
(115)
7.6
Lunghezza cavo ≈ 300
45
40
65
38.5
Scanalatura sensore
+0.030
0
)
4 x M5 x 0.8 prof. filettatura 8
50
E
Con protezione motore Cavo motore
Nota) La scanalatura inferiore della
guida del sensore non è adatta
per i sensori magnetici.
(4.2)
ø4 H9 (
prof. 4
2 x ø16
4 x ø6.3
Con freno
Cavo freno
(ø3.5)
(2 x ø5)
15
151.3
20
Lunghezza cavo ≈ 250
113.9
20
Lunghezza cavo ≈ 300
65
(1.1)
20
Cavo motore
(2 x ø5)
(36.3)
54
46.5
[mm]
Modello
Nota 1) Distanza entro cui cursore può muoversi quando
ritorna nella posizione di asse 0. Assicurarsi che il
pezzo montato sull'unità non interferisca con i
pezzi e le strutture circostanti.
Nota 2) Posizione dopo il ritorno alla posizione di asse 0.
Nota 3) Il numero tra parentesi indica quando è cambiata
la direzione di ritorno alla posizione di asse 0.
LEL25MT-100-
LEL25MT-200-
LEL25MT-300-
LEL25MT-400-
LEL25MT-500-
LEL25MT-600-
LEL25MT-700-
LEL25MT-800-
LEL25MT-900-
LEL25MT-1000-
LEL25LT-100-
LEL25LT-200-
LEL25LT-300-
LEL25LT-400-
LEL25LT-500-
LEL25LT-600-
LEL25LT-700-
LEL25LT-800-
LEL25LT-900-
LEL25LT-1000-
∗ Con protezione motore
7
L
L∗
A
B
272.5
372.5
472.5
572.5
672.5
772.5
872.5
972.5
1072.5
1172.5
292.5
392.5
492.5
592.5
692.5
792.5
892.5
992.5
1092.5
1192.5
280
380
480
580
680
780
880
980
1080
1180
300
400
500
600
700
800
900
1000
1100
1200
210
310
410
510
610
710
810
910
1010
1110
230
330
430
530
630
730
830
930
1030
1130
106
206
306
406
506
606
706
806
906
1006
108
208
308
408
508
608
708
808
908
1008
C
D
E
63
3
64
73
4
82
Selezione del modello
Sensore stato solido
Montaggio diretto
D-M9N(V)/D-M9P(V)/D-M9B(V)
Consultare il sito web di SMC per
ulteriori informazioni sui prodotti
conformi alle normative internazionali.
Caratteristiche tecniche del sensore
Grommet
PLC: Programmable Logic Controller
D-M9N
D-M9NV
D-M9P
D-M9PV
D-M9B
D-M9BV
Connessione elettrica
In linea
Perpendicolare
In linea
Perpendicolare
In linea
Perpendicolare
2 fili
3 fili
Tipo di cablaggio
NPN
Tipo di uscita
PNP
—
Carico applicabile
CI, Relè, PLC
Relè 24 VDC, PLC
Tensione d'alimentazione
5, 12, 24 VDC (4.5 a 28 V)
—
10 mA max.
Assorbimento
Tensione di carico
—
28 VDC max.
24 VDC (da 10 a 28 VDC)
—
2.5 a 40 mA
Corrente di carico
40 mA max.
Caduta di tensione interna
0.8 V max. a 10 mA (2 V max. a 40 mA)
4 V max.
Dispersione di corrente
100 μA max. a 24 VDC
0.8 mA max.
LED
Il LED rosso si illumina quando è su ON.
Certificazioni
Marcatura CE
LEL
Modello di sensore
Motore passo-passo (Servo/24 VDC)
La corrente di carico su due fili viene
ridotta (2.5 a 40 mA).
La flessibilità è 1.5 volte maggiore
rispetto al modello attuale
(confronto SMC).
Uso di un cavo flessibile di serie.
D-M9, D-M9V (con Led)
Cavi — Cavo vinilico flessibile antiolio per cicli intensi: ø2.7 x 3.2 ellittico, 0.15 mm2,
2 fili (D-M9B(V)), 3 fili (D-M9N(V)/D-M9P(V))
Nota) Per le specifiche comuni del sensore allo stato solido, consultare il Best Pneumatics N.2.
Peso
D-M9N(V)
D-M9P(V)
0.5
8
8
7
1
14
14
13
3
41
41
38
5
68
68
63
Lunghezza cavo
[m]
Precauzioni
Fissare il sensore con la vite in dotazione
installata sul corpo del sensore. Se si
utilizzano viti diverse da quelle fornite, il
sensore potrebbe danneggiarsi.
Codici di ordinazione
D-M9 N
Circuiti interni dei sensori
D-M9N(V)
—
Tipo di cablaggio/uscita
N
P
B
OUT
Nero
Connessione elettrica
3 fili NPN
3 fili PNP
2 fili
—
V
0.5 m
1m
3m
5m
Dimensioni
[mm]
D-M9
D-M9P(V)
6 Posizione di maggior sensibilità
DC (+)
Marrone
M2.5 x 4 L
Vite a testa solcata
LED
22
D-M9V
9.5
Circuito principale
del sensore
6 Posizione di maggior sensibilità
M2.5 x 4 L
Vite a testa solcata
4
OUT (+)
Marrone
2.6
2.7
4
DC (–)
Blu
D-M9B(V)
2.6
2.7
OUT
Nero
2.8
Circuito principale
del sensore
In linea
Perpendicolare
M
L
Z
3.2
DC (–)
Blu
Lunghezza cavo
LED
8
3.2
OUT (–)
Blu
2.8
4
2
4.6
Circuito principale
del sensore
DC (+)
Marrone
Serie
Precauzioni specifiche
del prodotto
Precauzione
D-M9B(V)
LECP1
Modello di sensore
LECP6
[g]
20
8
Sensore allo stato solido con LED bicolore
Montaggio diretto
D-M9NW(V)/D-M9PW(V)/D-M9BW(V)
Consultare il sito web di SMC per
ulteriori informazioni sui prodotti
conformi alle normative internazionali.
Caratteristiche tecniche del sensore
Grommet
PLC: Programmable Logic Controller
La corrente di carico su due fili viene
ridotta (2.5 a 40 mA).
La flessibilità è 1.5 volte maggiore rispetto
al modello attuale (confronto SMC).
Uso di un cavo flessibile di serie.
Il campo ottimale di esercizio può
essere determinato dal colore del
LED. (Rosso → Verde ← Rosso)
D-M9W, D-M9WV (con Led)
Modello di sensore D-M9NW D-M9NWV D-M9PW D-M9PWV D-M9BW D-M9BWV
In linea Perpendicolare In linea Perpendicolare In linea Perpendicolare
Connessione elettrica
3 fili
Tipo di cablaggio
2 fili
NPN
Tipo di uscita
PNP
CI, Relè, PLC
Relè 24 VDC, PLC
Tensione d'alimentazione
5, 12, 24 VDC (4.5 a 28 V)
—
10 mA max.
Tensione di carico
24 VDC (da 10 a 28 VDC)
Corrente di carico
Caduta di tensione interna
0.8 V max. a 10 mA (2 V max. a 40 mA)
2.5 a 40 mA
4 V max.
0.8 mA max.
100 μA max. a 24 VDC
Campo d'esercizio ........................ Il LED rosso si illumina.
Campo d'esercizio ottimale .......... Il LED verde si illumina.
LED
Marcatura CE
Certificazioni
Precauzione
Cavi — Cavo vinilico flessibile antiolio per cicli intensi: ø2.7 x 3.2 ellittico, 0.15 mm2,
2 fili (D-M9BW(V)), 3 fili (D-M9NW(V), D-M9PW(V))
Nota) Per le specifiche comuni del sensore allo stato solido, consultare il Best Pneumatics N.2.
Precauzioni
Fissare il sensore con la vite in dotazione
installata sul corpo del sensore. Se si
utilizzano viti diverse da quelle fornite, il
sensore potrebbe danneggiarsi.
Circuiti interni dei sensori
D-M9NW(V)
Peso
[g]
D-M9NW(V)
Modello di sensore
Lunghezza cavo
[m]
DC (+)
Marrone
Circuito principale
del sensore
—
—
28 VDC max.
40 mA max.
Dispersione di corrente
OUT
Nero
D-M9PW(V)
D-M9BW(V)
0.5
8
8
7
1
14
14
13
3
41
41
38
5
68
68
63
Codici di ordinazione
D-M9 N W V L
DC (–)
Blu
Serie
Lunghezza cavo
—
Tipo di cablaggio/uscita
D-M9PW(V)
N
P
B
OUT
Nero
Connessione elettrica
3 fili NPN
3 fili PNP
2 fili
—
In linea
Perpendicolare
V
M
L
Z
0.5 m
1m
3m
5m
Dimensioni
[mm]
3.2
Circuito principale
del sensore
DC (+)
Marrone
D-M9W
DC (–)
Blu
6 Posizione di maggior sensibilità
D-M9BW(V)
M2.5 x 4 L
Vite a testa solcata
LED
Circuito principale
del sensore
OUT (+)
Marrone
Led
Campo d'esercizio
OFF
M2.5 x 4 L
LED
8
2
Rosso
Campo di esercizio corretto
2.8
4
Verde
20
3.2
4.6
Vite a testa solcata
4
6 Posizione di maggior sensibilità
ON
2.6
9.5
D-M9WV
2.7
22
2.8
4
2.7
OUT (–)
Blu
9
—
Carico applicabile
Assorbimento
Indicatore
rosso
RoHS
2.6
LEL
Attuatore elettrico/Cursore guidato
Precauzioni specifiche del prodotto 1
Selezione del modello
Serie
Leggere attentamente prima dell'uso. Consultare la retrocopertina per le Istruzioni di
sicurezza e il Manuale di funzionamento per le Precauzioni degli attuatori elettrici.
Scaricarlo dal nostro sito web http://www.smcworld.com
2. Non utilizzare il prodotto in applicazioni soggette a
forze esterne eccessive o a possibili impatti.
Rischio di provocare un guasto.
Lo stopper interno potrebbe rompersi.
4. La forza di posizionamento deve corrispondere al
valore iniziale.
Se la forza di posizionamento viene impostata al di sotto del
valore iniziale, potrebbe generarsi un allarme.
3. A causa del tipo di meccanismo della guida, è
possibile che le vibrazioni provenienti da una fonte
esterna influiscano sul pezzo durante il funzionamento. Non usare questo prodotto in luoghi in
cui non sono consentite le vibrazioni.
5. La velocità effettiva del prodotto può vedersi modificata
dal carico.
Uso
6. Non applicare carichi, impatti né resistenze oltre al carico
trasportato durante il ritorno alla posizione di 0 asse.
Precauzione
1. Impostare la larghezza di determinazione della
posizione nei dati di movimentazione ad almeno 1.
Altrimenti, è possibile che il segnale di completamento del
posizionamento non venga emesso.
2. Segnale in uscita INP
1) Operazione di posizionamento
Quando il prodotto rientra nel campo impostato tramite i
dati di movimentazione [In posizione], si accenderà il
segnale in uscita INP.
Valore iniziale: impostato su [1] o più.
LEL
3. Non colpire mai in corrispondenza del fine corsa
salvo durante il ritorno nella posizione originale.
Motore passo-passo (Servo/24 VDC)
Selezionare un prodotto in base al carico massimo e il
momento ammissibile. Se il prodotto viene usato al di fuori dei
limiti di esercizio, il carico eccentrico applicato sulla guida
diventerà eccessivo con conseguenti effetti negativi quali la
formazione del gioco sulla guida, una minore precisione e una
vita utile più breve.
Al momento di selezionare un prodotto, consultare il catalogo
per le istruzioni sulla selezione.
In caso contrario, la posizione originale potrebbe spostarsi
dato che dipende dalla coppia del motore rilevata.
LECP6
1. Non applicare un carico che superi i limiti di esercizio.
Precauzione
7. Non incidere, graffiare o danneggiare il corpo e le
superficie del cursore.
Si potrebbe causare la perdita di parallelismo delle superfici di
montaggio, l'allentamento della guida, l'aumento della
resistenza allo scorrimento o altri problemi.
8. Durante il fissaggio del carico, non applicare forti
impatti o momenti elevati.
Se si applica una forza esterna superiore al momento ammissibile,
si potrebbe provocare l'allentamento della guida, l'aumento della
resistenza allo scorrimento o altri problemi.
9. Mantenere la planarità della superficie di montaggio
pari o inferiore a 0,2 mm.
L'insufficiente planarità di un pezzo o di una base montata sul
corpo del prodotto può provocare il gioco della guida e una
maggiore resistenza allo scorrimento.
10. Durante il montaggio del prodotto, prevedere come
minimo 40 mm per piegare il cavo.
11. Non colpire cursore con il pezzo durante
l'operazione di posizionamento e all'interno del
campo di posizionamento.
12. Durante lo spostamento del cilindro, prenderlo dalle
piastre terminali. Non prenderlo dalla protezione
della cinghia.
10
LECP1
Precauzione
Uso
Precauzioni specifiche
del prodotto
Progettazione
LEL
Attuatore elettrico/Cursore guidato
Precauzioni specifiche del prodotto 2
Serie
Leggere attentamente prima dell'uso. Consultare la retrocopertina per le Istruzioni di sicurezza
e il Manuale di funzionamento per le Precauzioni degli attuatori elettrici.
Scaricarlo dal nostro sito web http://www.smcworld.com
Uso
Manutenzione
Precauzione
Attenzione
13. Per montare il prodotto, usare viti dalla lunghezza
adeguata e serrarle con la coppia adeguata.
Frequenza della manutenzione
Eseguire la manutenzione in accordo con la tabella sotto.
Il serraggio delle viti ad una coppia più alta di quella raccomandata potrebbe causare un malfunzionamento, mentre il serraggio
a una coppia più bassa può causare lo spostamento della
posizione di montaggio o, in condizioni estreme, l'attuatore
potrebbe staccarsi dalla sua posizione di montaggio.
Frequenza
Fissaggio corpo
Controllo interno
Controllo cinghia
Ispezione prima del
funzionamento giornaliero
—
—
Ispezione ogni 6
mesi/1000 km/5
milioni di cicli∗
∗ Selezionare quella che viene prima.
øA
L
L
Modello
Vite
øA
[mm]
[mm]
LEL25
M6
6.6
35.5
L
Fissaggio carico
Vite
Max. coppia
i serraggio
[N·m]
L (Max. profondità
Modello
LEL25
M5 x 0.8
3
8
di avvitamento)
[mm]
Onde evitare che le viti di fissaggio del carico tocchino il corpo, usare viti pari
a 0.5 mm o inferiori alla profondità di avvitamento massima. Se si usano viti
lunghe, queste potrebbero toccare il corpo e causare malfunzionamenti.
14. Non effettuare l'azionamento tenendo ferma la slitta e
muovendo il corpo del attuatore.
15. Il cilindro con trasmissione a cinghia non può essere
usato per le applicazioni a montaggio verticale.
16. Controllare le specifiche riguardanti la velocità minima
di ogni attuatore.
In caso contrario, si potrebbero verificare malfunzionamenti
imprevisti come ad esempio il battito in testa.
17. Nel caso dell'attuatore con trasmissione a cinghia,
durante il funzionamento a velocità entro le specifiche dell'attuatore si potrebbero verificare vibrazioni. Ciò potrebbe essere causato dalle condizioni
di esercizio. Modificare la velocità impostandola su
un valore che non causa vibrazioni.
Elementi per controllo visivo esterno
1. Viti di arresto lente, sporcizia anomala
2. Controllo di incrinature e giunti per cavi
3. Vibrazioni, rumori
Elementi per controllo interno
1. Stato del lubrificante sulle parti mobili.
2. Allentamenti o giochi meccanici nelle parti fisse o nelle viti di fissaggio.
11
Controllo esterno
Elementi per controllo cinghia
Arrestare immediatamente il funzionamento e sostituire la
cinghia se questa sembra abbassata. Inoltre, sincerarsi che
l'ambiente e le condizioni operative soddisfino i requisiti
prescritti per il prodotto.
a. La tela dentata è consumata.
La fibra della tela diventa crespa. La gomma è rimossa e la fibra
diventa biancastra. Le linee delle fibre diventano indistinte.
b. Spellatura o usura della parte laterale della cinghia
L'angolo della cinghia diventa arrotondato e la sfilacciatura
fuoriesce.
c. Cinghia parzialmente tagliata
La cinghia è parzialmente tagliata. I corpi estranei presenti
nella dentatura eccetto la parte tagliata causano imperfezioni.
d. Linea verticale della dentatura della cinghia
Imperfezione che si forma quando la cinghia scorre sulla
flangia.
e. La gomma sul lato inferiore della cinghia è morbida e
appiccicosa.
f. Rottura inferiore della cinghia
LECP6
Motore passo-passo
LEL
Pagina 13
Motore passo-passo (servo/24 VDC)
Modello programmabile
Selezione del modello
Controllore
(Servo/24 VDC)
Modello a programmazione semplificata
Precauzioni specifiche
del prodotto
LECP1
Serie LECP6
Pagina 24
Servomotore
(Servo/24 VDC)
Serie LECP1
12
Controllore (Modello programmabile)
Motore passo-passo (Servo/24 VDC)
Serie LECP6
RoHS
Codici di ordinazione
LE C P 6 P
Controllore
Codice attuatore
Motore compatibile
P
(Eccetto le specifiche del cavo e le opzioni del cilindro)
Esempio: Inserire [LEL25MT-100] per LEL16B-100B-R36N3.
Motore passo-passo
(Servo/24 VDC)
Opzione
Posizionamento (punti)
64
6
—
Lunghezza cavo I/O [m]
—
Tipo di I/O parallelo
N NPN
P PNP
1
3
5
Senza cavo
1.5
3
5
D Nota)
Montaggio con viti
Montaggio su guida DIN
Nota) La guida DIN non è compresa.
Ordinarla a parte.
∗ Se si è selezionato il modello con controllore (-6N,-6P) al momento di ordinare la serie LE, non c'è bisogno di ordinare questo controllore.
Il controllore è fornito come unità singola (ricambio).
Verificare che il controllore e il cilindro siano compatibili.
<Prima dell'uso, effettuare i seguenti controlli>
q Controllare il numero di modello riportato sull'etichetta del cilindro. Corrisponde a quello sull'etichetta del controllore.
w Controllare che la la logica dei segnali I/O sia la medesima (NPN o PNP).
q
w
∗ Fare riferimento al manuale di istruzioni per l'utilizzo dei prodotti. Si prega di scaricare tramite il nostro sito. http://www.smcworld.com
Specifiche
Specifiche di base
Elemento
Motore compatibile
Alimentazione elettrica Nota 1)
Ingressi
Uscite
Codificatore compatibile
Comunicazione seriale
Memoria
Indicatore LED
Meccanismo freno
Lunghezza cavo [m]
Sistema di raffreddamento
Campo temperatura di esercizio [°C]
Campo umidità di esercizio [%]
Campo temperatura di stoccaggio [°C]
Campo umidità di stoccaggio [%RH]
Resistenza
d'isolamento [MΩ]
Peso [g]
Specifiche
Motore passo-passo bifase a collegamento unipolare
Tensione di alimentazione: 24 VDC 10% Assorbimento: 3 A (picco 5 A) Nota 2)
[Compresa potenza azionamento motore, potenza controllo, arresto, rilascio bloccaggio]
11(Fotoaccoppiato)
13 (Fotoaccoppiato)
Fase A/B, ingresso ricevitore linea Risoluzione 800 p/r
RS485 (conforme con protocollo Modbus)
EEPROM
LED (verde/rosso) uno di ciascuno
Normalmente chiuso (n.c.) Nota 3)
Cavo I/O: 5 max. Cavo attuatore: 20 max.
Raffreddamento naturale ad aria
0 a 40
90 max.
–10 a 60
90 max.
Tra sede (aletta di radiazione) e terminale SG 50 (500 VDC)
150 (montaggio vite)
170 (montaggio su guida DIN)
Nota 1) Non utilizzare un alimentatore con funzione di prevenzione "inrush current" per alimentare il controllore.
Nota 2) L'assorbimento varia a seconda del modello di cilindro. Per maggiori informazioni, consultare le specifiche dell'attuatore.
Nota 3) Applicabile a non-lock magnetizzazione.
13
Serie LECP6
Selezione del modello
Controllore (Modello programmabile)/Motore passo-passo (Servo/24 VDC)
Montaggio
a) Montaggio con viti (LECP6-)
b) Montaggio su guida DIN (LECP6D-)
(Installazione con due viti M4)
(Installazione con guida DIN)
La guida DIN è bloccata.
Motore passo-passo (servo/24 VDC)
Direzione di montaggio
Direzione di montaggio
LECP6
Guida DIN
LEL
Filo di
terra
Filo di terra
Filo di terra
A
Adattatore di montaggio guida DIN
LECP1
Agganciare il controllore sulla guida DIN e premere la
leva di sezione A in direzione della freccia per bloccarlo.
L
12.5
(Passo)
7.5
5.5
(35)
∗ Per , inserire un numero dalla linea ”N.“ nella tabella sotto.
Per le dimensioni di montaggio, andare a pagina 15.
5.25
(25)
AXT100-DR-
Precauzioni specifiche
del prodotto
Guida DIN
1.25
Dimensioni L [mm]
N.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
Dimensione L
23
35.5
48
60.5
73
85.5
98
110.5
123
135.5
148
160.5
173
185.5
198
210.5
223
235.5
248
260.5
No.
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
285.5
298
310.5
323
335.5
348
360.5
373
385.5
398
410.5
423
435.5
448
460.5
473
485.5
498
510.5
Dimensione L 273
Adattatore di montaggio guida DIN
LEC-D0 (con 2 viti di montaggio)
Da usarsi quando l'adattatore di montaggio della guida DIN viene montato successivamente sul controllore a montaggio con viti.
14
Serie LECP6
Dimensioni
a) Montaggio con viti (LECP6-)
(81.7)
66
1
LED alimentazione elettrica
(verde) (ON: alimentazione accesa).
ø4.5
per
montaggio
corpo
35
31
LED alimentazione elettrica
(rosso) (ON: allarme acceso).
Connettore I/O parallelo CN5
141
132
Connettore codificatore CN3
150
Connettore I/O seriale CN4
Connettore potenza motore CN2
Connettore di alimentazione CN1
4.6
per montaggio corpo
b) Montaggio su guida DIN (LECP6D-)
(81.7)
Consultare pagina 14 per la dimensione L
e il codice della guida DNI.
(11.5)
66
35
1
(91.7)
15
150
132
167.3 (Durante bloccaggio guida DIN)
173.2 (Durante rimozione guida DIN)
35
64.2
31
Serie LECP6
Esempio di cablaggio 1
Connettore di alimentazione elettrica: CN1
Connettore di alimentazione per LECP6
∗ La spina di alimentazione è un accessorio.
Selezione del modello
Controllore (Modello programmabile)/Motore passo-passo (Servo/24 VDC)
Terminale connettore di alimentazione CN1 per LECP6 (Contatto Phoenix FK-MC0.5/5-ST-2.5)
Esempio di cablaggio 2
Connettore I/O parallelo: CN5
∗ Quando si collega un PLC al connettore I/O parallelo CN5, usare il cavo I/O (LEC-CN5-).
∗ Cambiare il cablaggio a seconda del tipo di I/O parallelo (NPN o PNP).
Schema elettrico
LECP6N- (NPN)
A1
A2
COM–
A2
IN0
A3
IN0
A3
IN1
A4
IN1
A4
IN2
A5
IN2
A5
IN3
A6
IN3
A6
IN4
A7
IN4
A7
IN5
A8
IN5
A8
SETUP
A9
SETUP
A9
HOLD
A10
HOLD
A10
DRIVE
A11
DRIVE
A11
RESET
A12
RESET
A12
SVON
A13
SVON
A13
OUT0
B1
OUT0
B1
OUT1
B2
OUT1
B2
OUT2
B3
OUT2
B3
OUT3
B4
OUT3
B4
OUT4
B5
OUT4
B5
OUT5
B6
OUT5
B6
BUSY
B7
BUSY
B7
AREA
B8
AREA
B8
SETON
B9
SETON
B9
INP
B10
INP
B10
Carico
SVRE
B11
SVRE
B11
∗ESTOP
B12
∗ESTOP
B12
∗ALARM
B13
∗ALARM
B13
Segnale di ingresso
Nome
COM+
COM–
IN0 a IN5
SETUP
HOLD
DRIVE
RESET
SVON
Contenuto
Collega l'alimentazione 24 V per il segnale di ingresso/uscita
Collega l'alimentazione 0 V per il segnale di ingresso/uscita
No. di bit specificati dei dati di movimentazione
(l'input viene ordinato in combinazione di IN0 a 5).
Istruzione per ritornare alla posizione originale
Il funzionamento è temporaneamente sospeso.
Istruzione di azionamento
Reset allarme e interruzione del funzionamento
Istruzione di accensione servo
LECP6
A1
LECP1
COM–
24 VDC per
segnale I/O
CN5
COM+
Carico
Precauzioni specifiche
del prodotto
CN5
COM+
LECP6P- (PNP)
24 VDC per
segnale I/O
LEL
M24V
C24V
EMG
BK RLS
Descrizione della funzione
Il terminale M24V/terminale C24V/terminale EMG/terminale BK RLS
Alimentazione comune (–)
sono comuni (–).
Alimentazione elettrica motore (+) Questa è l'alimentazione elettrica del motore (+) fornita al controllore.
Alimentazione elettrica controllo (+) Questa è l'alimentazione elettrica del controllo (+) fornita al controllore.
Questo è l'ingresso (+) che rilascia l'arresto.
Arresto (+)
Questo è l'ingresso (+) che rilascia il freno.
Rilascio freno (+)
Motore passo-passo (servo/24 VDC)
0V
Funzione
0V
M24V
C24V
EMG
BK RLS
Nome terminale
Segnale di uscita
Nome
Contenuto
OUT0 a OUT5 Emette il n. di dati di movimentazione durante il funzionamento
Si attiva quando l'attuatore si muove
BUSY
Si attiva all'interno del campo di impostazione uscita area dati di movimentazione
AREA
Si attiva durante il ritorno alla posizione originale
SETON
Si attiva quando viene raggiunta la posizione o la forza target
INP
(Si accende al termine del posizionamento o della spinta).
SVRE
Si attiva quando il servo è acceso
∗ESTOP Nota)
Nessuna uscita quando è ordinato l'arresto EMG
∗ALARM Nota)
Nessuna uscita quando è generato un allarme
Nota) Segnale di circuito logico negativo (N.C.)
16
Serie LECP6
Impostazione punti di posizionamento
1. Impostazione dati di movimentazione per il posizionamento
Durante questa impostazione, il cilindro si muove in avanti e si
arresta nella posizione target. Il seguente schema mostra gli
elementi di impostazione e l'operazione. Sotto sono indicati gli
elementi di impostazione e i valori impostati per questa operazione.
Dati di movimentazione (posizionamento)
Necessità
Elemento
Descrizione
Metodo di movimento
Quando è richiesta la posizione assoluta,
impostare Absolute. Quando è richiesta la
posizione relativa, impostare Relative.
Velocità
Velocità di trasferimento nella posizione
Posizione
Posizione target
Accelerazione
Parametro che definisce la rapidità con cui il
cilindro raggiunge la velocità impostata. Quanto
più elevato è il valore impostato tanto più
rapidamente raggiunge la velocità impostata.
Decelerazione
Parametro che definisce la rapidità con cui il cilindro
raggiunge l'arresto completo. Quanto più elevato è il
valore impostato, tanto più velocemente si ferma.
Forza di spinta
Impostare 0.(Se sono impostati i valori da 1 a
100, il funzionamento passerà all'operazione
di spinta).
Bassa tensione di innesco
Impostazione non richiesta.
Velocità di spinta
Impostazione non richiesta.
Forza di posizionamento
Coppia max. durante l'operazione di posizionamento
(non è richiesta una modifica specifica).
Area 1, Area 2
Condizione che accende il segnale di
uscita AREA.
In posizione
Condizione che accende il segnale di
uscita INP. Quando il cilindro entra nel
campo di [in posizione], si accende il
segnale di uscita INP. (Non è necessario
cambiarlo rispetto al valore iniziale). Se è
necessario emettere il segnale di arrivo
prima del termine dell'operazione,
accrescere il valore.
Velocità
Velocità
Decelerazione
Accelerazione
Posizione
: Da impostare.
: Da regolare, se necessario.
: Impostazione non richiesta.
In posizione
Uscita INP
17
ON
OFF
ON
Serie LECP6
Selezione del modello
Controllore (Modello programmabile)/Motore passo-passo (Servo/24 VDC)
Funzionamento segnali
Ritorno alla posizione di 0 asse
24 V
0V
Alimentazione elettrica
ON
OFF
SVON
SETUP
ON
OFF
BUSY
SVRE
SETON
Uscita
INP
∗ALARM
LEL
Motore passo-passo (servo/24 VDC)
Ingresso
∗ESTOP
Velocità
LECP6
0 mm/s
Ritorno all'origine
Se il cilindro si trova all'interno del campo "in posizione" del
parametro base, INP si accenderà. In caso contrario, rimarrà spento.
Scansione n. dati
di movimentazione
IN
Ingresso
DRIVE
15 ms
or more
Emissione n. dati
di movimentazione
ON
OFF
OUT
Uscita
ON
OFF
Precauzioni specifiche
del prodotto
Operazione di posizionamento
LECP1
∗ ”∗ALARM“ e ”∗ESTOP“ vengono espressi come circuito a logica negativa.
BUSY
INP
Velocità
0 mm/s
Operazione di posizionamento
Se il cilindro si trova all'interno del campo "in posizione" dei dati di
movimentazione, INP si accenderà. In caso contrario, rimarrà spento.
∗ ”OUT“ viene emesso quando ”DRIVE“ passa da ON a OFF.
(Quando si applica l'alimentazione elettrica, ”DRIVE“ o ”RESET“ si accende
oppure ”∗ESTOP“ si spegne, tutte le emissioni ”OUT“ si spengono).
HOLD
Reset
Ingresso
HOLD
ON
OFF
Uscita
BUSY
ON
OFF
Velocità
Punto di
partenza
rallentamento
HOLD durante il funzionamento
∗ Quanto il cilindro si trova nel campo di posizionamento durante l'operazione
di spinta, non si ferma anche se viene emesso il segnale HOLD.
0 mm/s
Ingresso
Reset allarme
RESET
ON
OFF
OUT
ON
OFF
∗ALARM
ON
OFF
Uscita
Emissione allarme
È possibile identificare il gruppo dell'allarme attraverso la
combinazione dei segnali OUT quando si genera l'allarme.
∗ ”∗ALARM“ e ”∗ESTOP“ vengono espressi come circuito a logica negativa.
18
Serie LECP6
Opzioni: Cavo di collegamento
[Cavo Robotic per motore passo-passo (servo/24 VDC) cavo standard]
6
(ø8)
(14.2)
Connettore A
L
(30.7)
Connettore D
(N. terminale)
A1
B1
A6
B6
(14.7)
(11)
LE-CP- A8 BC /Lunghezza cavo: 8 m, 10 m, 15 m, 20 m
Lato controllore
(∗ Realizzato su richiesta)
(30.7)
(10)
A
A
B
B
COM-A/COM
COM-B/–
N. terminale
connettore A
B-1
A-1
B-2
A-2
B-3
A-3
Vcc
GND
A
A
B
B
B-4
A-4
B-5
A-5
B-6
A-6
Circuito
Cavo standard
Connettore A
L
Connettore D
Colore cavo
Marrone
Rosso
Arancione
Giallo
Verde
Blu
Schermo
Colore cavo
Marrone
Nero
Rosso
Nero
Arancione
Nero
—
(N. terminale)
A1
B1
A6
(18)
16
(ø6.3)
Cavo Robotico
(cavo flessibile)
2
15
(14)
Lato attuatore
(13.5)
1
(14.2)
(ø5.5)
Connettore C
(N. terminale)
1
2
5
6
Modello cavo
S
2
5
(10)
∗ Realizzato su richiesta
(cavo Robotic solo)
—
1
(17.7)
Lunghezza cavo (L) [m]
1.5
1
3
3
5
5
8∗
8
10∗
A
15∗
B
20∗
C
Lato attuatore
Lato controllore
Connettore C
(14)
(N. terminale)
1
2
5
6 (13.5)
(18)
1
LE-CP- 35 /Lunghezza cavo: 1.5 m, 3 m, 5 m
1
(17.7)
LE CP
B6
(14.7)
(11)
N. terminale
connettore C
2
1
6
5
3
4
N. terminale
connettore D
12
13
7
6
9
8
3
[Cavo Robotico con freno e sensore per motore passo-passo (servo/24 VDC) cavo standard]
LE CP
1
B
1
LE-CP- 35 /Lunghezza cavo: 1.5 m, 3 m, 5 m
—
S
(ø5.7)
(18)
(14)
(10.2) (17.7)
Connettore B
(30.7)
L
A6
A1
A3
(11)
B6
B1
B3
(14.7)
16
Cavo Robotico
(cavo flessibile)
Cavo standard
Connettore B
(30.7)
(10)
Circuito
A
A
B
B
COM-A/COM
COM-B/–
Connettore C (14.2)
(14)
Connettore A
(ø5.5)
(N. terminale)
1
2
5
6
(13.5)
1
2
Lato controllore
(ø6.3)
Lato attuatore
L
N. terminale
connettore A
B-1
A-1
B-2
A-2
B-3
A-3
Vcc
GND
A
A
B
B
Circuito
Nota) Non viene usato per la serie LEL.
Bloccaggio (+)
Bloccaggio (–)
Sensore (+)Nota)
Sensore (–)Nota)
B-4
A-4
B-5
A-5
B-6
A-6
N. terminale
connettore B
B-1
A-1
B-3
A-3
Connettore D
Colore cavo
Marrone
Rosso
Arancione
Giallo
Verde
Blu
Schermo
19
Connettore D
(N. terminale)
A1
B1
LE-CP- A8 BC /Lunghezza cavo: 8 m, 10 m, 15 m, 20 m (∗ Realizzato su richiesta)
15
Modello cavo
Lato controllore
Connettore C (14.2)
(N. terminale)
A1
B1
A6
A1
A3
(18)
Con freno e sensore
16
(10)
(ø5.7)
∗ Realizzato su richiesta
(cavo Robotic solo)
15
(10.2) (17.7)
Lunghezza cavo (L) [m]
1.5
1
3
3
5
5
8∗
8
10∗
A
15∗
B
20∗
C
Connettore A
(ø8)
Lato attuatore
(N. terminale)
1
2
5
6 (13.5)
1
2
(11)
(14.7)
N. terminale
connettore C
2
1
6
5
3
4
Marrone
Nero
Rosso
Nero
Arancione
Nero
—
N. terminale
connettore D
12
13
7
6
9
8
3
Rosso
Nero
Marrone
Blu
4
5
1
2
Colore cavo
B6
B1
B3
Serie LECP6
Selezione del modello
Controllore (Modello programmabile)/Motore passo-passo (Servo/24 VDC)
Opzioni: cavo I/O
Cavo I/O
Lato PLC
A1
N. pin
connettore
B1
B2
B3
B4
B5
B6
B7
B8
B9
B10
B11
B12
B13
—
Colore
Indicazione
cavo
Giallo
Verde chiaro
Verde chiaro
Grigio
Grigio
Bianco
Bianco
Marrone chiaro
Marrone chiaro
Giallo
Giallo
Verde chiaro
Verde chiaro
Schermo
A13
Colore
punto
Rosso
Nero
Rosso
Nero
Rosso
Nero
Rosso
Nero
Rosso
Nero
Rosso
Nero
Rosso
LECP6
Colore
Colore
Indicazione
punto
cavo
Marrone chiaro
Nero
Marrone chiaro
Rosso
Giallo
Nero
Giallo
Rosso
Nero
Verde chiaro
Rosso
Verde chiaro
Nero
Grigio
Rosso
Grigio
Nero
Bianco
Rosso
Bianco
Nero
Marrone chiaro
Rosso
Marrone chiaro
Nero
Giallo
B13
LECP1
N. pin
connettore
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
B13
Precauzioni specifiche
del prodotto
L
Motore passo-passo (servo/24 VDC)
A13
B1
(14.4)
∗ Misura conduttore: AWG28
(N. terminale)
B1 A1
LEL
(ø8.9)
Lunghezza cavo (L) [m]
1.5
1
3
3
5
5
Lato controllore
1
(22.4)
LEC CN5
20
Serie LEC
Software controllore/LEC-W2
Codici di ordinazione
LEC W2
q Software di impostazione
del controllore
w Cavo di
comunicazione
e Cavo USB
(A-mini B type)
Software controllore
(Disponibile in giapponese e in inglese).
Contenuto
HRS
q Software controllore (CD-ROM)
PC
w Cavo di comunicazione
(Cavo tra il controllore e l'unità di conversione)
e Cavo USB (Cavo tra il PC e l'unità di conversione)
Requisiti hardware
Macchina compatibile PC/AT installata con Windows XP e dotata di porte USB1.1 o USB2.0.
∗ Windows® e Windows XP® sono marchi registrati di Microsoft Corporation.
Esempio di schermata
Esempio di schermata "Easy mode"
Esempio di schermata "Normal mode"
Facilità di utilizzo e semplicità delle
impostazioni
Consente di impostare e visualizzare i dati di
movimentazione del cilindro quali la posizione,
la velocità, la forza, ecc.
È possibile eseguire sulla stessa pagina
l'impostazione dei dati di movimentazione e il
test della trasmissione.
Può essere usato per il movimento manuale e il
movimento a velocità costante.
21
Impostazione standard
È possibile impostare nel dettaglio i dati di movimentazione.
È possibile monitorare i segnali e lo stato del terminale.
È possibile impostare i parametri.
È possibile eseguire il movimento manuale e il movimento a velocità
costante, il ritorno alla posizione di 0 asse e verificare il funzionamento
corretto dei segnali I/O.
Selezione del modello
Serie LEC
Terminale di programmazione/LEC-T1
RoHS
Codici di ordinazione
Interruttore di abilitazione
—
Lunghezza cavo [m]
3
3
Pulsante di emergenza
Lingua
J Giapponese
E Inglese
S
Assente
Dotato di interruttore di abilitazione
∗ Interruttore interbloccato per funzione
prova movimento manuale
Pulsante di emergenza
Pulsante di emergenza
G
Specifiche
Elemento
Descrizione
Pulsante di emergenza, interruttore di abilitazione (opzione)
Interruttore
LECP6
3
Lunghezza cavo
IP64 (eccetto connettore)
Grado di protezione
Campo temperatura di esercizio [°C]
5 a 50
Campo umidità di esercizio [%RH]
90 max. (senza condensazione)
350 (eccetto cavo)
Peso [g]
LECP1
Nota) Conforme a CE
La conformità EMC del Terminale di programmazione è stata provata solo con il controllore LECP6 e il
cilindro applicabile.
"Easy mode"
Funzione
Descrizione
Dati di movimentazione s)MPOSTAZIONEDATIDIMOVIMENTAZIONE
Jog (manuale)
s-OVIMENTOMANUALE
s2ITORNOAASSE
Test
s/PERAZIONEPASSO
s2ITORNOAASSE
Display
s6ISUALIZZAZIONEASSEENDATIDIMOVIMENTAZIONE
s6ISUALIZZAZIONEDIDUEELEMENTISELEZIONATIDA
posizione, velocità, forza.
Allarme
s6ISUALIZZAZIONEALLARMEATTIVO
s2ESETALLARME
s2ICOLLEGAMENTOASSE
s)MPOSTAZIONEMODOSEMPLICENORMALE
Impostazione TB s)MPOSTAZIONEDEIDATIDIMOVIMENTAZIONE
e selezione dell'elemento per funzione di
monitoraggio
Schema operazioni menù
Menù
Dati
Display
Jog (manuale)
Test
Allarme
Impostazione TB
LEL
Terminale di programmazione
Dati
N. dati di movimentazione
Impostazione di due elementi selezionati sotto
(Posizione, velocità, forza, accelerazione, decelerazione)
Display
6ISUALIZZAZIONENPASSO
6ISUALIZZAZIONEDIDUEELEMENTISELEZIONATISOTTO
(Posizione, velocità, forza)
Jog (manuale)
2ITORNOAASSE
Movimento manuale
Test
/PERAZIONEPASSO
Allarme
6ISUALIZZAZIONEALLARMEATTIVO
2ESETALLARME
Impostazione TB
2ICOLLEGAMENTO
3EMPLICENORMALE
Elemento impostato
22
Precauzioni specifiche
del prodotto
Interruttore di abilitazione
(opzione)
-OTOREPASSOPASSOSERVO6$#
LEC T1 3 E G
Serie LEC
"Normal mode"
Schema operazioni menù
Funzione
Descrizione
Dati di movimentazione s)MPOSTAZIONEDATIDIMOVIMENTAZIONE
Parametro
s)MPOSTAZIONEPARAMETRI
Test
s-OVIMENTOMANUALEMOVIMENTO
a velocità costante
s2ITORNOAASSE
s0ROVADICOLLAUDOSPECIFICAREUN
massimo di 5 dadi di
movimentazione e azionare).
s5SCITAOBBLIGATORIAUSCITA
SEGNALEOBBLIGATORIAUSCITA
TERMINALEOBBLIGATORIO
Display
s$ISPLAYAZIONAMENTO
s$ISPLAYSEGNALEDIUSCITA
s$ISPLAYSEGNALEDIINGRESSO
s$ISPLAYTERMINALEDIUSCITA
s$ISPLAYTERMINALEDIINGRESSO
Allarme
s6ISUALIZZAZIONEALLARMEATTIVO
RESETALLARME
s6ISUALIZZAZIONEREGISTROALLARME
Menù
Dati di movimentazione
Parametro
Display
Test
Allarme
File
Impostazione TB
Ricollegamento
s3ALVATAGGIODATI3ALVAREIDATIDI
movimentazione e i parametri del
controllore in uso per la
COMUNICAZIONEÒPOSSIBILE
SALVAREFILECONUNINSIEMEDI
dati di movimentazione e
PARAMETRIDEFINITIINUNFILEUNICO
s#ARICAMENTOCONTROLLORE#ARICAI
DATISALVATINELLATEACHINGBOXSUL
controllore in uso per la
comunicazione.
s#ANCELLAZIONEDATISALVATI
File
s)MPOSTAZIONEDISPLAYMODO
SEMPLICENORMALE
s)MPOSTAZIONELINGUA
GIAPPONESEINGLESE
Impostazione TB s)MPOSTAZIONERETROILLUMINAZIONE
s)MPOSTAZIONECONTRASTO,#$
s)MPOSTAZIONESUONOBIP
s-AXASSEDICOLLEGAMENTO
s5NITËDIDISTANZAMMPOLLICI
Ricollegamento
Dati di movimentazione
N. dati di movimentazione
-/$MOVIMENTO
6ELOCITË
Posizione
Accelerazione
Decelerazione
Forza di spinta
Bassa tensione di innesco
6ELOCITËDISPINTA
Forza di posizionamento
!REA
In posizione
Parametro
Base
/2)'
Impostazione base
Monitor
Azionamento
3EGNALEDIUSCITA
3EGNALEDIINGRESSO
Terminale di uscita
Terminale di ingresso
Display DRV
0OSIZIONEVELOCITËCOPPIA
N. di passo
N. ultimo passo
Test
*/'-/6%
2ITORNOA/2)'
Prova di collaudo
5SCITAOBBLIGATORIA
Display segnale di ingresso
Allarme
!,-ATTIVO
2EGISTRO!,-
ALM attivo
6ISUALIZZAZIONEALLARMEATTIVO
Reset allarme
File
3ALVATAGGIODATI
#ARICAMENTOSUCONTROLLORE
%LIMINAZIONEFILE
Visualizzazione registro ALM
6ISUALIZZAZIONEINGRESSOREGISTRO
Impostazione ORIG
Display segnale di uscita
Display terminale di uscita
Display terminale di ingresso
Impostazione TB
3EMPLICENORMALE
,INGUA
Retroilluminazione
#ONTRASTO,#$
Bip
-AXASSEDICOLLEGAMENTO
Password
5NITËDIDISTANZA
s2ICOLLEGAMENTOASSE
Ricollegamento
Dimensioni
4
102
34.5
w
N.
q
185
r
e
y
u
23
t
i
25
22.5
Descrizione
Funzione
1
Display
!CRISTALLILIQUIDICONRETROILLUMINAZIONE
2
Anello
5NANELLOPERAGGANCIAREIL4ERMINALEDIPROGRAMMAZIONE
3
Pulsante di emergenza
"LOCCAEARRESTAILFUNZIONAMENTOQUANDOQUESTOINTERRUTTOREVIENEPREMUTO
)LBLOCCAGGIOVIENERILASCIATOQUANDOVIENEGIRATOADESTRA
4
Protezione interruttore di arresto 5NAPROTEZIONEPERLgINTERRUTTOREDIARRESTO
5
0REVIENELAMESSAINFUNZIONEINDESIDERATAFUNZIONAMENTO
Interruttore di
INATTESODELLAFUNZIONEDIPROVAMOVIMENTOMANUALE.ON
abilitazione (opzione)
SONOCOPERTEALTREFUNZIONIQUALILAMODIFICADATI
6
Interruttore a chiave
Interruttore per ogni ingresso
7
Cavo
,UNGHEZZAMETRI
8
Connettore
5NCONNETTORECOLLEGATOAL#.DELCONTROLLORE
Selezione del modello
RoHS
Serie LECP1
LEL25MT-100
LE C P 1 P 1
Lunghezza cavo I/O [m]
Controllore
—
Motore compatibile
P
1
3
5
Motore passo-passo (Servo/24 VDC)
Numero punti di posizionamento
Senza cavo
1,5
3
5
Tipo di I/O parallelo
1 14 a programmazione semplificata
N
P
Motore passo-passo (servo/24 VDC)
Codici di ordinazione
NPN
PNP
Codice cilindro
(Eccetto le specifiche del cavo e le opzioni del cilindro)
Esempio: Inserire [LEL25MT-100] per LEL25MT-100B-R36N3
∗ Quando il controllore di tipo (-1N/-1P) viene
selezionato l'ordine della serie LE non è necessario
applicare per questo driver.
LEL
Controllore a programmazione semplificata
LECP6
Il controllore è fornito come unità singola (ricambio).
Verificare che il controllore e il cilindro siano compatibili.
∗ Consultare il manuale di funzionamento per usare questo prodotto. Scaricarlo dal nostro sito web http://www.smcworld.com
Specifiche
Elemento
Motore compatibile
Motore passo-passo (Servo/24 VDC)
Tensione di alimentazione: 24 VDC ±10%
Alimentazione
Assorbimento max.: 3A (picco 5A) Nota 2)
elettrica Nota 1)
[Compresa potenza azionamento motore, potenza controllo, arresto, rilascio bloccaggio]
Ingressi
6 (Fotoaccoppiato)
Uscite
6 (Fotoaccoppiato)
Punti d'arresto
14 punti (numero posizione da 1 a 14(E))
Encoder compatibile
Fase A/B incrementale (800 impulsi/giro)
Comunicazione seriale
RS485 (conforme con protocollo Modbus)
Memoria
EEPROM
LED
LED (verde/rosso) uno di ciascuno
Display LED a 7 segmenti Nota 3) Display a 1 cifra, 7 segmenti (rosso) Le cifre sono espresse in esadecimale (da “10” a “15” in numero decimale sono espresse come “A” a “F”)
Meccanismo freno
Normalmente chiuso (n.c.) Nota 4)
Lunghezza cavo [m]
Cavo I/O: 5 max. Cavo attuatore: 20 max.
Sistema di raffreddamento
Raffreddamento naturale ad aria
Temperatura d'esercizio [°C]
15 a 40
Campo umidità d'esercizio [%UR]
90 max
Temperatura d'esercizio [°C]
15 a 60
Campo umidità di stoccaggio [%UR]
90 max.
Resistenza d'isolamento [MΩ]
Tra sede (aletta di radiazione) e terminale SG 50 (500 VDC)
Peso [g]
130
Nota 1) Non utilizzare un alimentatore con funzione di prevenzione “inrush current” per alimentare il controllore.
Nota 2) L'assorbimento varia a seconda del modello di attuatore. Per ulteriori dettagli, consultare il manuale del relativo attuatore.
Nota 3) “10” a “15” in numero decimale sono visualizzati come segue nel LED a 7 segmenti.
Visualizzazione decimale
10
11
12
13
14
15
Visualizzazione esadecimale
A
b
c
d
E
F
Nota 4) Applicabile al meccanismo freno non magnetizzante.
24
Precauzioni specifiche
del prodotto
Caratteristiche basilari
LECP1
Specifiche
Serie LECP1
Dettagli del controllore
!8
!7
r
Display
N.
q
PWR
w
ALM
Dettagli
Descrizione
LED di alimentazione
LED allarme
Alimentazione elettrica ON/servo ON
:Verde si accende
Alimentazione elettrica ON/servo OFF
:Verde intermittente
Con allarme Rosso si accende
Impostazione parametri
: Rosso intermittente
!6
e
—
Copertura
!5
r
—
FG
t
y
u
i
o
!0
!1
!2
!3
!4
!5
!6
!7
!8
—
—
Interruttore modo
Cambiare il modo tra manuale e automatico.
LED a 7 segmenti
Posizione d'arresto, il valore impostato da e i dati dell'allarme vengono visualizzati.
e
t
q
y
w
u
i
o
!0
!1
!2
!3
!4
SET
—
MANUAL
SPEED
ACCEL
CN1
CN2
CN3
CN4
Modifica e protezione del modo SW (chiudere il coperchio
dopo la modifica di SW)
Telaio (serrare la vite con il dado per il montaggio del
controllore. Collegare il cavo di terra).
Tasto di impostazione Decidere le impostazioni o il funzionamento del drive in modo manuale.
Selettore della posizione Assegnare la posizione al drive (da 1 a 14) e la posizione di origine (15).
Tasto manuale avanti
Eseguire il movimento manuale e comando a impulsi avanti
Tasto manuale indietro Eseguire il movimento manuale e comando a impulsi indietro.
Interruttore velocità avanti Sono disponibili 16 velocità avanti.
Interruttore velocità indietro Sono disponibili 16 velocità indietro.
Interruttore accelerazione avanti Sono disponibili 16 passi di accelerazione avanti.
Interruttore accelerazione indietro Sono disponibili 16 passi di accelerazione indietro
Connettore di alimentazione Collegare il cavo di alimentazione.
Connettore motore
Collegare il connettore del motore.
Connettore encoder Collegare il connettore dell'encoder.
Connettore I/O
Collegare il cavo I/O.
Montaggio
Montaggio del controllore mostrato sotto.
1. Vite di montaggio (LECP1-)
2. Messa a terra
(Installazione con due viti M4)
Serrare la vite con il dado per il montaggio del cavo
di terra come indicato sotto.
Filo di terra
Vite M4
Direzione di montaggio
Cavo con terminale a presa
Rondella dentata di bloccaggio
Direzione di montaggio
Controllore
Precauzione
sViti M4, cavo con terminale di fissaggio e rondella dentata di bloccaggio non compresi.
Prevedere una messa a terra atta ad assicurare la tolleranza al rumore.
sUsare un cacciavite di precisione della misura mostrata sotto per cambiare l'interruttore di
posizione i e il valore di impostazione dell'interruttore di velocità/accelerazione !1 a !4.
Taglia
Larghezza estremità L :2.0 a 2.4 [mm]
Spessore estremità W :2.0 a 0.6 [mm]
W
L
25
Ingrandimento dell'estremità
del cacciavite
Serie LECP1
Selezione del modello
Controllore a programmazione semplificata
Dimensioni
Connettore I/O CN4
Connettore motore CN2
Connettore di alimentazione CN1
38
36,2
4,5
85
LEL
Motore passo-passo (servo/24 VDC)
Connettore encoder CN3
18,1
ø4.5
per montaggio su corpo
LECP1
86
4,5
per montaggio su corpo
Precauzioni specifiche
del prodotto
101
110
LECP6
1,2
26
LECP1
Serie
Esempio di cablaggio 1
∗ Quando si collega un connettore di alimentazione CN1, usare il cavo di
alimentazione (LEC-CK1-1).
∗ Il cavo di alimentazione (LEC-CK1-1) è un accessorio.
Connettore di alimentazione elettrica: CN1
Terminale connettore di alimentazione CN1 per LECP1
Nome terminale Colore del cavo
0V
Blu
Funzione
Alimentazione
comune (–)
Il terminale M24V/terminale C24V/
terminale BK RLS sono comuni (–).
M24V
Alimentazione
Bianco elettrica motore (+)
C24V
Alimentazione
Questa è l'alimentazione elettrica del
Marrone elettrica controllo (+)
controllo (+) fornita al controllore.
BK RLS
Nero
Cavo di alimentazione per LECP1 (LEC-CK1-1)
Descrizione della funzione
Questa è l'alimentazione elettrica
del motore (+) fornita al controllore.
Rilascio freno (+)
Questo è l'ingresso (+) che rilascia il freno.
Esempio di cablaggio 2
Connettore I/O parallelo: CN4
∗ Quando si collega un PLC al connettore I/O parallelo CN4, usare il cavo I/O (LEC-CK4-).
∗ Cambiare il cablaggio a seconda del tipo di I/O parallelo (NPN o PNP).
NPN
PNP
CN4
COM +
COM –
24 VDC
per segnale I/O
1
1
2
COM –
2
IN0
9
IN0
9
IN1
10
IN1
10
IN2
11
IN2
11
IN3
12
IN3
12
RESET
13
RESET
13
STOP
14
STOP
14
OUT0
3
OUT0
3
OUT1
4
OUT1
4
OUT2
5
OUT2
5
OUT3
6
OUT3
6
BUSY
7
BUSY
7
ALARM
8
ALARM
8
Carico
Segnale in ingresso
Contenuto
COM+
COM–
Collega l'alimentazione 24 V per il segnale in ingresso/uscita
Nome
Istruzione di azionamento (ingresso come combinazione di IN0 a IN3)
Istruzione di ritorno alla posizione di 0 asse (IN0 a IN3 tutte ON contemporaneamente)
Esempio - (istruzione di azionamento per posizione n. 5)
IN2
ON
IN1
OFF
IN0
ON
Reset allarme e interruzione del funzionamento
In funzione : arresto decelerazione dalla posizione in cui
Contenuto
Si accende al termine del posizionamento o della spinta.
Collega l'alimentazione 0 V per il segnale in ingresso/uscita
IN3
OFF
RESET
Carico
Segnale in uscita
Nome
da IN0 a IN3
24 VDC
per segnale I/O
CN4
COM +
OUT0 a OUT3
(L'uscita viene ordinata in combinazione di OUT0 a 3.)
Esempio - (funzionamento completo per posizione n. 3)
OUT3
OFF
BUSY
∗ALARM Nota)
OUT2
OFF
OUT1
ON
OUT0
ON
Si attiva quando l'attuatore si muove
Nessuna uscita quando l'allarme è attivo o servo OFF
Nota) Questi segnali vengono emessi quando l'alimentazione elettrica del
controllore è attiva. (N.C.)
il segnale è immesso (servo ON mantenuto)
Mentre l'allarme è attivo: risettaggio dell'allarme
STOP
Istruzione di arresto (dopo arresto decelerazione massima, servo OFF)
Segnale in ingresso [IN0 - IN3] Tabella numero posizione : OFF : ON
Segnale in uscita [OUT0 - OUT3] Tabella numero posizione : OFF : ON
Numero posizione
1
2
3
4
5
6
7
8
9
10 (A)
11 (B)
12 (C)
13 (D)
14 (E)
Ritorno alla pos. di 0 asse
Numero posizione
1
2
3
4
5
6
7
8
9
10 (A)
11 (B)
12 (C)
13 (D)
14 (E)
Ritorno alla pos. di 0 asse
27
IN3
IN2
IN1
IN0
OUT3
OUT2
OUT1
OUT0
Serie LECP1
Selezione del modello
Controller a programmazione semplificata
Funzionamento segnali
(1) Ritorno alla posizione di 0 asse
Uscita
IN0-3
ON
OFF
BUSY
ON
OFF
OUT0-3
∗ ALARM
Rilascio
Mantenimento
Freno esterno
Velocità
0 mm/s
Dopo l'inizializzazione del sistema controllore ON
LEL
Ingresso
24 V
0V
IN0-3 tutte ON
Motore passo-passo (servo/24 VDC)
Alimentazione elettrica
Ritorno alla posizione
di 0 asse
I segnali in uscita per OUT0, OUT1, OUT2, OUT3 sono
ON al termine del ritorno alla posizione di 0 asse.
(2) Operazione di posizionamento
ON
OFF
OUT0-3
Uscita
IN0-3
Ingresso
STOP
BUSY
ON
OFF
OUT0-3
Rilascio
Mantenimento
Freno esterno
LECP1
IN0-3
24 V
0V
ON
OFF
Alimentazione elettrica
Uscita
BUSY
Precauzioni specifiche
del prodotto
Ingresso
(4) Arresto mediante segnale STOP
24 V
0V
ON
OFF
Alimentazione elettrica
LECP6
∗ “∗ALARM” è espresso come circuito a logica negativa.
∗ ALARM
0 mm/s
Velocità
Posizionamento
Rilascio
Mantenimento
Freno esterno
Il segnale delle uscite OUT0-3 sono ON
nello stesso stato degli ingressi IN0-3 al
termine del posizionamento.
Velocità
Arresto mediante segnale STOP
durante l'operazione di posizionamento.
0 mm/s
(3) Arresto interruzione (arresto reset)
24 V
0V
ON
OFF
Alimentazione elettrica
IN0-3
Ingresso
(5) Reset allarme
Resettaggio allarme
Ingresso
RESET
ON
OFF
Uscita
∗ ALARM
ON
OFF
RESET
ON
OFF
OUT0-3
Uscita
∗ “∗ALARM” è espresso come circuito a logica negativa.
BUSY
Rilascio
Mantenimento
Freno esterno
Velocità
Emissione allarme
Arresto interruzione durante
operazione di posizionamento.
0 mm/s
28
Serie
LECP1
Opzioni: Cavo cilindro
[Cavo robotico per motore passo-passo (servo/24 VDC), cavo standard]
1
2
15
Connettore C
Connettore A
16
(10)
8B
A C Lunghezza
L
(30.7)
Connettore D
(13.5)
1
—
Cavo robotico
(Cavo flessibile)
S
Cavo standard
2
15
Tipo cablato
(Numero pin)
A1
B1
A6
16
(30.7)
(10)
Connettore A
(11)
Lato controllore
(14.2)
(14)
L
N. terminale
connettore A
B-1
A-1
B-2
A-2
B-3
A-3
Circuito
A
A
B
B
COM-A/COM
COM-B/–
Vcc
GND
A
A
B
B
Connettore D
Marrone
Rosso
Arancione
Giallo
Verde
Blu
Colore del cavo
Marrone
Nero
Rosso
Nero
Arancione
Nero
—
B-4
A-4
B-5
A-5
B-6
A-6
(Numero pin)
A1
B1
A6
B6
(14.7)
(11)
Colore del cavo
Schermo
B6
(14.7)
(18)
∗ Realizzato su richiesta
(solo cavo robotico)
Lato attuatore
(ø6.3)
(Numero pin)
2
6
(ø5.5)
/
cavo: 8 m, 10 m, 15 m, 20 m
(∗ Realizzato su richiesta)
Connettore C
1
5
(14.2)
(17.7)
LE-CP-
Lato attuatore
(14)
Lunghezza cavo (L)[m]
1,5
1
3
3
5
5
8∗
8
10∗
A
15∗
B
20∗
C
2
6 (13.5)
(18)
(Numero pin) 1
5
(ø8)
1
(17.7)
LE CP
Lato controllore
1
LE-CP- 35 /Lunghezza cavo: 1.5 m, 3 m, 5 m
N. terminale
connettore C
2
1
6
5
3
4
N. terminale
connettore D
12
13
7
6
9
8
3
[Cavo robotico con freno e sensore per motore passo-passo (servo/24 VDC), cavo standard]
(30.7)
Connettore B
L
Connettore D
A6
A1
A3
(11)
B6
B1
B3
(14.7)
Cavo standard
(30.7)
Circuito
A
A
B
B
COM-A/COM
COM-B/–
Connettore B
L
N. terminale
connettore A
B-1
A-1
B-2
A-2
B-3
A-3
(14.2)
Vcc
GND
A
A
B
B
Circuito
Freno (+)
Freno (–)
Sensore (+) Nota)
Sensore (–) Nota)
B-4
A-4
B-5
A-5
B-6
A-6
N. terminale
connettore B
B-1
A-1
B-3
A-3
Connettore D
Colore del cavo
Marrone
Rosso
Arancione
Giallo
Verde
Blu
Schermo
Nota) Non viene usato per la serie LEL.
Connettore C
(14)
16
(10)
Cavo robotico
(Cavo flessibile)
Lato controllore
(18)
15
Connettore A
(ø5.7)
Tipo cablato
(Numero pin)
1
2
5
6
(13.5)
1
2
(ø5.5)
Lato attuatore
(ø6.3)
/Lunghezza cavo: 8 m, 10 m, 15 m, 20 m
(∗ Realizzato su richiesta)
(Numero pin)
A1
B1
LE-CP-
Con freno e sensore
29
(14.2)
(14)
16
(10)
8B
AC
∗ Realizzato su richiesta
(solo cavo robotico)
S
Lato controllore
Connettore C
(18)
15
Connettore A
(ø8)
Lunghezza cavo (L)[m]
1,5
1
3
3
5
5
8∗
8
10∗
A
15∗
B
20∗
C
—
Lato attuatore
(Numero pin)
1
2
5
6 (13.5)
1
2
(ø5.7)
B
(10.2) (17.7)
1
(10.2) (17.7)
LE CP
1
LE-CP- 35 /Lunghezza cavo: 1.5 m, 3 m, 5 m
(Numero pin)
A1
B1
A6
A1
A3
(11)
N. terminale
connettore C
2
1
6
5
3
4
Marrone
Nero
Rosso
Nero
Arancione
Nero
—
N. terminale
connettore D
12
13
7
6
9
8
3
Rosso
Nero
Marrone
Blu
4
5
1
2
Colore del cavo
B6
B1
B3
(14.7)
Serie LECP1
Selezione del modello
Controller a programmazione semplificata
Opzioni
[Cavo di alimentazione]
(13,3)
(35)
(10,5)
(60)
(1500)
Nome terminale Colore coperchio
Blu
0V
M24V Bianco
C24V Marrone
BK RLS Nero
Funzione
Alimentazione comune (–)
Alimentazione elettrica motore (+)
Alimentazione elettrica controllo (+)
Rilascio freno (+)
∗ Misura conduttore: AWG20
LEL
(ø6)
Motore passo-passo (servo/24 VDC)
(15,8)
LEC CK1 1
[Cavo I/O]
LECP6
LEC CK4
Lunghezza cavo (L)[m]
1,5
1
3
3
5
5
LECP1
Lato PLC
(30)
Numero pin Colore isolamento
1
Marrone chiaro
Nero
Funzione
COM +
2
Marrone chiaro
Rosso
COM –
3
Giallo
Nero
OUT0
4
Giallo
Rosso
OUT1
5
Verde chiaro
Nero
OUT2
6
Verde chiaro
Rosso
OUT3
7
Grigio
Nero
BUSY
8
Grigio
Rosso
ALARM
9
Bianco
Nero
IN0
10
Bianco
Rosso
IN1
11
Marrone chiaro
Nero
IN2
12
Marrone chiaro
Rosso
IN3
13
Giallo
Nero
RESET
14
Giallo
Rosso
STOP
Indicazione
Colore punto
(60)
(10)
(L)
Precauzioni specifiche
del prodotto
(11)
(ø7.9)
(16)
Lato controllore
∗ Misura conduttore: AWG26
∗ Il segnale I/O parallelo è valido in modo automatico. Durante la funzione prova in modo normale, solo l'uscita è valida.
30
31
Istruzioni di sicurezza
Precauzione:
Attenzione:
Pericolo :
Le istruzioni di sicurezza servono per prevenire situazioni pericolose e/o danni alle
apparecchiature. Il grado di pericolosità è indicato dalle diciture di"Precauzione",
"Attenzione" o"Pericolo.“ Rappresentano avvisi importanti relativi alla sicurezza e devono
essere seguiti assieme agli standard internazionali (ISO/IEC)∗1)e altri regolamenti sulla
sicurezza.
Precauzione indica un pericolo con un livello basso
di rischio che, se non viene evitato, potrebbe
provocare lesioni lievi o medie.
Attenzione indica un pericolo con un livello medio
di rischio che, se non viene evitato, potrebbe
provocare lesioni gravi o la morte.
∗1) ISO 4414: Pneumatica – Regole generali relative ai sistemi pneumatici.
ISO 4413: Idraulica – Regole generali relative ai sistemi.
IEC 60204-1: Sicurezza dei macchinari – Apparecchiature elettriche delle macchine.
(Parte 1: norme generali)
ISO 10218-1: Sicurezza dei robot industriali di manipolazione.
ecc.
Pericolo indica un pericolo con un livello alto di
rischio che, se non viene evitato, provocherà lesioni
gravi o la morte.
Precauzione
Attenzione
1. La compatibilità del prodotto è responsabilità del progettista
dell'impianto o di chi ne definisce le specifiche tecniche.
Dato che il presente prodotto viene usato in diverse condizioni operative, la sua
compatibilità con un determinato impianto deve essere decisa dalla persona che
progetta l'impianto o ne decide le caratteristiche tecniche in base ai risultati delle
analisi e prove necessarie. La responsabilità relativa alle prestazioni e alla sicurezza
dell'impianto è del progettista che ha stabilito la compatibilità con il prodotto. La
persona addetta dovrà controllare costantemente tutte le specifiche del prodotto,
facendo riferimento ai dati del catalogo più aggiornato con l'obiettivo di prevedere
qualsiasi possibile guasto dell'impianto al momento della configurazione dello stesso.
2. Solo personale qualificato deve azionare i macchinari e gli impianti.
Il presente prodotto può essere pericoloso se utilizzato in modo scorretto. Il montaggio,
il funzionamento e la manutenzione delle macchine o dell'impianto che
comprendono il nostro prodotto devono essere effettuati da un operatore esperto e
specificamente istruito.
3. Non effettuare la manutenzione o cercare di rimuovere il prodotto e
le macchine/impianti se non dopo aver verificato le condizioni di
sicurezza.
1. L'ispezione e la manutenzione della macchina/impianto possono essere effettuate
solo ad avvenuta conferma dell'attivazione delle posizioni di blocco di sicurezza
specificamente previste.
2. Al momento di rimuovere il prodotto, confermare che le misure di sicurezza di cui
sopra siano implementate e che l'alimentazione proveniente da qualsiasi
sorgente sia interrotta. Leggere attentamente e comprendere le precauzioni
specifiche del prodotto di tutti i prodotti relativi.
3. Prima di riavviare la macchina/impianto, prendere le dovute precauzioni per
evitare funzionamenti imprevisti o malfunzionamenti.
4. Contattare prima SMC e tenere particolarmente in considerazione le
misure di sicurezza se il prodotto viene usato in una delle seguenti
condizioni.
1. Condizioni o ambienti che non rientrano nelle specifiche date, l'uso all'aperto o in
luoghi esposti alla luce diretta del sole.
2. Impiego nei seguenti settori: nucleare, ferroviario, aviazione, spaziale, dei
trasporti marittimi, degli autotrasporti, militare, dei trattamenti medici, alimentare,
della combustione e delle attività ricreative. Oppure impianti a contatto con
alimenti, circuiti di blocco di emergenza, applicazioni su presse, sistemi di
sicurezza o altre applicazioni inadatte alle specifiche standard descritte nel
catalogo del prodotto.
3. Applicazioni che potrebbero avere effetti negativi su persone, cose o animali, e
che richiedano pertanto analisi speciali sulla sicurezza.
4. Utilizzo in un circuito di sincronizzazione che richiede un doppio sistema di
sincronizzazione per evitare possibili guasti mediante una funzione di protezione
meccanica e controlli periodici per confermare il funzionamento corretto.
Istruzioni di sicurezza
Assicurarsi di leggere le
"Precauzioni per l'uso dei prodotti di
SMC" (M-E03-3) prima dell'uso.
1. Questo prodotto è stato progettato per l'uso nell'industria manifatturiera.
Il prodotto qui descritto è previsto basicamente per l'uso pacifico nell'industria
manifatturiera.
Se è previsto l'utilizzo del prodotto in altri tipi di industrie, consultare prima SMC per
informarsi sulle specifiche tecniche o all'occorrenza stipulare un contratto.
Per qualsiasi dubbio, contattare la filiale di vendita più vicina.
Limitazione di garanzia ed esonero di
responsabilità/
Requisiti di conformità
Il prodotto usato è soggetto alla seguente "Limitazione di garanzia ed
esonero di responsabilità" e "Requisiti di conformità".
Limitazione di garanzia ed esonero di responsabilità
1. Il periodo di garanzia del prodotto è di 1 anno in servizio o 1 anno e mezzo dalla
consegna del prodotto.∗2)
Inoltre, il prodotto dispone di una determinata durabilità, distanza di
funzionamento o parti di ricambio. Consultare la filiale di vendita più vicina.
2. Per qualsiasi guasto o danno subito durante il periodo di garanzia di nostra
responsabilità, sarà effettuata la sostituzione del prodotto o dei pezzi necessari.
Questa limitazione di garanzia si applica solo al nostro prodotto in modo indipendente e non ad altri danni che si sono verificati a conseguenza del guasto del
prodotto.
3. Prima di utilizzare i prodotti di SMC, leggere e comprendere i termini della garanzia
e gli esoneri di responsabilità indicati nel catalogo del prodotto specifico.
∗2) Le ventose per vuoto sono escluse da questa garanzia di 1 anno.
Una ventosa per vuoto è un pezzo consumabile pertanto è soggetto a garanzia per un anno a
partire dalla consegna.
Inoltre, anche durante il periodo di garanzia, l'usura del prodotto dovuta all'uso della ventosa per
vuoto o il guasto dovuto al deterioramento del materiale in plastica non sono coperti dalla
garanzia limitata.
Requisiti di conformità
1. È assolutamente vietato l'uso dei prodotti di SMC negli impianti di produzione per
la fabbricazione di armi di distruzione di massa o altro tipo di armi.
2. Le esportazioni dei prodotti o della tecnologia di SMC da un paese a un altro sono
regolate dalle relative leggi e norme sulla sicurezza dei paesi impegnati nella
transazione. Prima di spedire un prodotto di SMC in un altro paese, assicurarsi di
conoscere e osservare tutte le norme locali che regolano l'esportazione in questione.
SMC Corporation (Europe)
Austria
Belgium
Bulgaria
Croatia
Czech Republic
Denmark
Estonia
Finland
France
Germany
Greece
Hungary
Ireland
Italy
Latvia
+43 (0)2262622800
+32 (0)33551464
+359 (0)2807670
+385 (0)13707288
+420 541424611
+45 70252900
+372 6510370
+358 207513513
+33 (0)164761000
+49 (0)61034020
+30 210 2717265
+36 23511390
+353 (0)14039000
+39 0292711
+371 67817700
SMC CORPORATION
www.smc.at
www.smcpneumatics.be
www.smc.bg
www.smc.hr
www.smc.cz
www.smcdk.com
www.smcpneumatics.ee
www.smc.fi
www.smc-france.fr
www.smc.de
www.smchellas.gr
www.smc.hu
www.smcpneumatics.ie
www.smcitalia.it
www.smclv.lv
[email protected]
[email protected]
[email protected]
[email protected]
[email protected]
[email protected]
[email protected]
[email protected]
[email protected]
[email protected]
[email protected]
[email protected]
[email protected]
[email protected]
[email protected]
Lithuania
Netherlands
Norway
Poland
Portugal
Romania
Russia
Slovakia
Slovenia
Spain
Sweden
Switzerland
Turkey
UK
+370 5 2308118
+31 (0)205318888
+47 67129020
+48 (0)222119616
+351 226166570
+40 213205111
+7 8127185445
+421 (0)413213212
+386 (0)73885412
+34 902184100
+46 (0)86031200
+41 (0)523963131
+90 212 489 0 440
+44 (0)845 121 5122
www.smclt.lt
www.smcpneumatics.nl
www.smc-norge.no
www.smc.pl
www.smc.eu
www.smcromania.ro
www.smc-pneumatik.ru
www.smc.sk
www.smc.si
www.smc.eu
www.smc.nu
www.smc.ch
www.smcpnomatik.com.tr
www.smcpneumatics.co.uk
[email protected]
[email protected]
[email protected]
[email protected]
[email protected]
[email protected]
[email protected]
[email protected]
[email protected]
[email protected]
[email protected]
[email protected]
[email protected]
[email protected]
Akihabara UDX 15F, 4-14-1, Sotokanda, Chiyoda-ku, Tokyo 101-0021, JAPAN Phone: 03-5207-8249 FAX: 03-5298-5362
1st printing QT printing QT 00 Printed in Spain
Specifications are subject to change without prior notice and any obligation on the part of the manufacturer.