Capitolo 1
Fisiologia e modellistica dei muscoli scheletrici
Capitolo 1
Fisiologia e modellistica
dei muscoli scheletrici
1.1 Introduzione
I muscoli scheletrici sono saldamente connessi all’impalcatura scheletrica ed
hanno il compito di generare, attraverso il meccanismo della contrazione di cui
sono dotati, sia il movimento che la stabilità. Nel seguito si cercherà di fornire
una sintetica ma completa trattazione sulla struttura muscolare dal punto di vista
fisiologico ed i meccanismi attraverso i quali il segnale neurale produce forza
meccanica: in particolare vedremo come questa sia legata alla lunghezza ed alla
velocità del muscolo. Per quanto riguarda le dinamiche
neurali, si terrà in
considerazione non solo il meccanismo eccitatorio innescato dai motoneuroni alfa
e gamma, ma anche il riflesso di stiramento prodotto dai fusi neuromuscolari.
7
Capitolo 1
Fisiologia e modellistica dei muscoli scheletrici
1.2 Struttura anatomica e fisiologia dei muscoli scheletrici
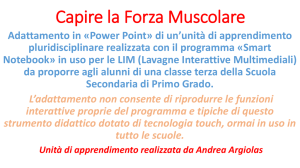
Ogni muscolo risulta composto da fibre tenute insieme da tessuto connettivo, il
cui numero dipende dalla grandezza della sezione trasversale del muscolo. Una
singola fibra é formata da una membrana, da molti nuclei sparsi lungo la fibra e da
migliaia di filamenti interni detti miofibrille costituenti il citoplasma. Il tessuto
connettivo suddivide il muscolo in una struttura di gruppi e sottogruppi. La fascia
più esterna è quella che avvolge l’intero muscolo e prende il nome di epimisio. Vi
sono altre fasce che avvolgono gruppi sempre più piccoli e sono il perimisio e
l’endomisio. Fig 1.1
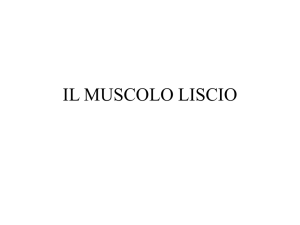
Fig 1.1 Schema della sezione trasversale di un muscolo scheletrico, che ne dimostra l’impalcatura
connettivale. Ep: Epimisio, P: Perimisio, En: Endomisio
8
Capitolo 1
Fisiologia e modellistica dei muscoli scheletrici
La funzione di tali fasce nei confronti delle fibre muscolari e di :
•
Dare loro elasticità
•
Proteggerle da traumi
•
Tenerle assieme
•
Mantenere il tono trofismo muscolare
Ogni singola fibra muscolare ha un diametro da 10 a 100 µm ed è avvolta
dall’endomisio, essa copre l’intera lunghezza del muscolo fino alle sue
intersezioni tendinee. Contiene le proteine contrattili dette miofibrille disposte in
senso longitudinale che sono in grado di contrarsi ad uno stimolo neurale od
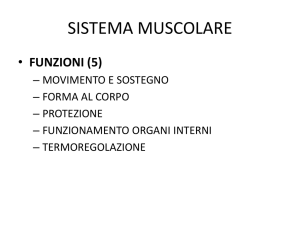
elettrico. Ad una analisi microscopica le miofibrille consistono in unità cilindriche
ripetute, chiamate sarcomeri, separati dai dischi Z (figura 1.2). Il sarcomero
dunque rappresenta la più piccola unità contrattile. E’ composta da due distinte
proteine, la miosina (filamento spesso) e l’actina (filamento sottile): quest’ultimi
sono discontinui ed hanno una loro terminazione attaccata al disco Z, mentre gli
altri, i filamenti di miosina, sono posizionati al centro del sarcomero, intervallati
con i filamenti sottili; questa disposizione regolare conferisce il noto aspetto di
striatura del muscolo I due tipi di miofilamenti sono uniti fra loro da legami
chimici, che formano veri e propri ponti molecolari fra le due strutture proteiche
(la miosina e l’actina). La teoria che descrive il meccanismo della contrazione è
stata formulata intorno agli anni ’50 da Huxley e prende il nome di sliding
filament theory. Durante la contrazione le teste globulari della molecola di
miosina si attaccano ai siti recettori dell’actina, formando un ponte, chiamato
cross bridge. Il movimento rotatorio imposto alle teste della miosina trascina il
filamento di actina modificando di fatto la lunghezza complessiva del sarcomero
producendo una forza contrattile. In pratica nessuna delle proteine cambia
lunghezza, il movimento è il risultato dello scorrimento una sull’altro dei
filamenti.
9
Capitolo 1
Fisiologia e modellistica dei muscoli scheletrici
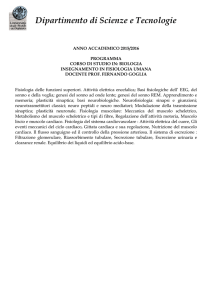
Fig 1.2 A. Ricostruzione tridimensionale di un settore di una fibra muscolare; mostra i rapporti tra
la membrana ed il sistema tubolare della miofibrille. B. Singola miofibrilla in cui sono evidenziate
la bande chiare e scure.. Ciascun sarcomero è separato dai dischi Z. Le bande scure sono in
corrispondenza delle regioni in cui i filamenti proteinici sono sovrapposti. C. Sezione schematica
di un singolo sarcomero. Il filamento sottile è composta principalmente da actina, mentre il
filamento spesso è una catena di molecole di miosina.
L'attività enzimatica della miosina è inibita in condizioni di riposo ma viene
disinibita quando aumenta la concentrazione di ioni Ca2+ ; questa, infatti, è circa
3x10-7 in condizioni di riposo, ma sale a 10-5
10
all'inizio del processo di
Capitolo 1
Fisiologia e modellistica dei muscoli scheletrici
contrazione. Il Ca è presente in elevata concentrazione nelle cisterne del reticolo
sarcoplasmatico , seguendo l'elevato gradiente di concentrazione, può spostarsi
all'interno della fibrocellula muscolare, innescando la sequenza di reazioni
chimiche che ne provocano l'accorciamento. Il reticolo sarcoplasmatico, a sua
volta, viene indotto a rilasciare parte del Ca++, sequestrato dal potenziale d'azione
della membrana della fibrocellula muscolare, che può facilmente propagarsi anche
all'interno della cellula attraverso il sistema dei tubuli trasversi. Ogni potenziale
d'azione muscolare è capace di attivare ogni volta il sistema contrattile al massimo
grado. Al termine della depolarizzazione la concentrazione di Ca++, all'interno
cade rapidamente, perché le cisterne del reticolo non rilasciano più Ca++ e perché
i canali longitudinali del reticolo reincorporano attivamente ioni Ca++. Il
processo con cui il potenziale d'azione della fibrocellula muscolare regola e
controlla il comportamento delle proteine contrattili prende il nome di
"accoppiamento elettromeccanico".
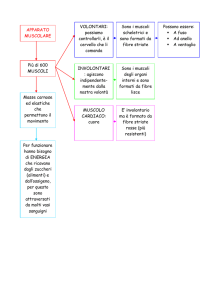
La quantità di forza contrattile che un muscolo può produrre dipende molto dalla
sua lunghezza iniziale. Huxley trovò che la relazione forza-lunghezza consiste in
una serie di segmenti lineari a pendenze diverse (figura 1.3) Questo
comportamento è compatibile con la teoria dello sliding filament, che prevede che
la quantità di forza contrattile dovrebbe essere proporzionala linearmente al
numero di cross-bridges. Ciascun segmento corrisponde ad un ben preciso pattern
di sovrapposizione dei filamenti. Questo comportamento in un singolo sarcomero
si riflette sul comportamento dell’intero muscolo. Quello che si misura nello
stiramento complessivo del muscolo è una curva smussata in quanto per una data
lunghezza non tutti i sarcomeri si trovano nello stesso stato.
11
Capitolo 1
Fisiologia e modellistica dei muscoli scheletrici
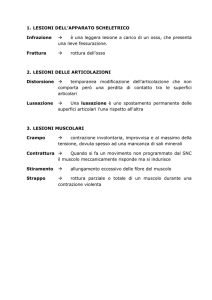
Fig 1.3 Quando il muscolo è eccessivamente tirato (a) non vi è possibilità di creare il cross-bridge
e pertanto la forza e nulla. Analogamente a quanto succede (e) nel caso di sovrapposizione si
riducono le teste di miosina che possono trovare siti liberi. Le altre posizioni (b,c,d) producono
forza compatibilmente con il numero di teste miosiniche che riescono ad effettuare il cross-bridge.
1.2.1 Unità motorie, meccanismo di reclutamento e generazione della
forza
Ciascuna fibra muscolare è innervata da un solo motoneurone, ma ciascuno di essi
può innervare più fibre del muscolo scheletrico contemporaneamente. Dato che
tutte le fibre muscolari innervate dal motoneurone si contraggono in risposta allo
stimolo proveniente dall’assone del neurone Liddell e Sherrington introdussero il
concetto di “unita motoria” (UM) per indicare quella combinazione di elementi –il
motoneurone e tutte le fibre che esso innerva- che rappresentano la più piccola
unità funzionale controllabile dal sistema motorio. Il numero di fibre muscolari
innervate da un motoneurone è chiamato rapporto di innervazione . Sebbene
questo vari considerevolmente da un muscolo rispetto ad un altro, esso è
approssimativamente proporzionale alla grandezza del muscolo.Ad esempio i
muscoli extraoculari, che sono molto piccoli, questo rapporto è circa 10, mentre
12
Capitolo 1
Fisiologia e modellistica dei muscoli scheletrici
nel gastrocnemio può arrivare fino a 2000. Una basso rapporto di innervazione
indica una migliore capacità nel graduare la forza. Le unita motorie possono
essere distinte in tre tipi in base alle fibre muscolari di cui sono composte. La
prima è chiamata fast fatiguable: si contrae rapidamente, ma si esaurisce
rapidamente quando viene stimolata ripetutamente. Queste unità producono alti
valori di forza. Il secondo gruppo, chiamate slow, hanno possibilità di contrarsi
per tempi molto più lunghi, ma la forza che sono in grado di generare è di solo 110% rispetto alle unita fast fatiguable .Il terzo gruppo si pone ad un livello
intermedio tra le due precedenti, ha dei valori di mantenimento di forza più alti
delle prime, e possono produrre più forza delle seconde,vengono chiamate fast
fatigue resistant secondo lo schema presentato in figura 1.4.
Figura 1.4 A E’ mostrata la produzione di forza per un singolo impulso in funzione del tempo,
mentre in B è evidenziato l’andamento tetanico, con una scarica di stimoli a 12Hz. In C è il
muscolo è attivato da uno stimolo tetanico per 330 sec e ripetuto ogni secondo. La forza tetanica
prodotta da ciascuna unita motoria è proporzionale alla lunghezza del segmento.
13
Capitolo 1
Fisiologia e modellistica dei muscoli scheletrici
E’ stato osservato che i motoneuroni sono attivati dal potenziale sinaptico in un
ordine fissato che rispecchia la velocità di conduzione e quindi il diametro dei
loro assoni. Quando un insieme di motoneuroni sono attivati i corpi cellulari più
piccoli sono attivati per primi e dal segnale più debole in quanto hanno una più
bassa soglia per l’attivazione sinaptica. Quando l’input cresce progressivamente,
anche i motoneuroni più grandi vengono attivati. Questo modo di operare il
reclutamento delle unita motorie è chiamato size principle. Tale comportamento è
stato osservato sperimentalmente in tutti i muscoli sia di animali che di uomini, ed
interviene nei movimenti volontari e riflessi. Quindi il segnale sinaptico attiva
prima le UM slow, poi quelle fast fatigue resistant e per ultime le fast fatiguable .
Questo ordine di reclutamento ha tre importanti conseguenze funzionali: la prima
e che viene semplificata la modulazione della forza. I centri nervosi più alti non si
devono preoccupare di quali unita motorie selezionare per un dato livello di forza
richiesto. Il secondo è che l’incremento di forza generato da successive attivazioni
dei moto neuroni è proporzionale alla soglia di forza alla quale sono reclutati, in
questo modo la precisione della forza prodotta rimane costante per tutti i livelli di
forza. Terzo, le più numerose unita motorie lente sono usate di più e devono
essere adeguatamente supportate da un punto di vista metabolico.
Fig 1.5 Placca neuromuscolare. Va ad attivare un certo numero di sarcomeri, attivando tramite
l’impulso nervoso il rilascio di calcio e la sua propagazione all’interno del reticolo
sarcoplasmatico.
14
Capitolo 1
Fisiologia e modellistica dei muscoli scheletrici
La contrazione prevede una sequenza di interventi: dal cervello partono gli
impulsi nervosi (fino a circa 50 al secondo ad una velocità da 12 a 120 metri al
secondo) diretti alle corna anteriori del midollo spinale (motoneuroni alfa). Questi
proseguono poi fino alla placca motrice che è posta a contatto delle fibre
muscolari interessate (Figura1.5).
La contrazione muscolare può essere studiata in diverse condizioni: se la
lunghezza del muscolo è mantenuta costante si parla di contrazione isometrica e
viene sviluppata una certa tensione; se il muscolo è libero di accorciarsi si parla di
contrazione isotonica ed il risultato sarà un certo spostamento. La massima forza
contrattile in condizioni isometriche dipende dalla lunghezza alla quale il muscolo
viene mantenuto. Nel caso di contrazione isotonica la velocità di accorciamento è
funzione inversa, ma non lineare, del carico. Se la fibra muscolare viene stimolata
da un singolo potenziale d'azione, applicato al tronco nervoso o al muscolo stesso,
essa risponderà con una singola scossa muscolare.
Fig 1.6 Miogramma isotonico di : 1, scossa muscolare semplice; 2-3, tetano incompleto; 4, tetano
completo. In ascissa sono visualizzati gli stimoli.
15
Capitolo 1
Fisiologia e modellistica dei muscoli scheletrici
Questa inizierà dopo che il potenziale d'azione, della durata di circa 2 ms, avrà già
completato il suo corso. La durata della singola scossa è diversa per i diversi
muscoli: può durare poche decine di msec nei muscoli rapidi o poche centinaia di
msec nei muscoli lenti. Se un secondo potenziale d'azione segue il primo, prima
che la fibra muscolare si sia rilasciata, la forza di contrazione evocata dal secondo
stimolo si aggiunge a quella preesistente. Se gli impulsi si susseguono ad elevata
frequenza, la forza di contrazione aumenta fino a raggiungere un tetto massimo: si
parla, allora, di contrazione tetanica (figura 1.6).
1.3 Studio della meccanica muscolare : il modello di Hill
Il modello di Hill vuole rappresentare il muscolo attraverso una struttura
macroscopica che ne possa contenere le caratteristiche principali. I sui studi
risalgono al 1927 e da allora il modello è stato preso come riferimento per quasi
ogni studio di modellistica muscolare. L’origine del modello di Hill è
caratterizzata dalle attente e delicate misurazione del comportamento del muscolo
isolato e stimolato massimamente. Gasser e Hill (1924) utilizzarono il muscolo
sartorio di una rana imponendo una variazione molto rapida di forza e lunghezza.
Le loro misurazioni furono tali da indurli a ritenere la risposta transitoria del
muscolo attivato assomigliava a quello di un sistema viscoelastico passivo. Tale
sistema è composto da due elementi elastici ed un elemento viscoso più
l’elemento attivo contrattile come mostrato in figura. Lo studio più importante di
Hill fu quello del 1938 in cui, attraverso misurazioni energetiche di un muscolo,
riuscì a formulare delle equazioni che ebbero un’importanza fondamentale nella
modellistica della meccanica muscolare. L’esperimento cruciale fu lo, come lui
stesso lo definisce, “stiramento rapido isotonico”. Consiste in due fasi separate:
nella prima il muscolo viene tenuto ad una lunghezza fissata (intorno al punto di
16
Capitolo 1
Fisiologia e modellistica dei muscoli scheletrici
lunghezza media del muscolo) e stimolato massimamente, fino ad ottenere una
forza contrattile Po costante. Nella seconda fase la forza viene diminuita
rapidamente ad un valore P e mantenuta (figura 1.7 a). La variazione di lunghezza
che si ottiene è proporzionale a P e la velocità di accorciamento è tanto più alta
quanto più è la differenza tra Po e P. Figura (1.7 b). Quello che succede è che il
muscolo all’inizio della seconda fase subisce un accorciamento istantaneo di
grandezza − ∆L che coincide con il cambio di forza agente sul muscolo; − ∆L
aumenta con la differenza di carico imposta
P0 − P
(Figura 1.7c).
Successivamente il muscolo prosegue nel suo accorciamento a velocità costante.
La velocità di accorciamento è funzione di P0 − P (Figura1.7d).
Figura 1.7 Test effettuato da Hill : rilasciamento rapido isotonico. a) Forza applicata in funzione
del tempo, per tre diversi carichi. b) Lunghezza del muscolo per i tre carichi corrispondenti. c)
After-Load in funzione dell’accorciamento istantaneo. d) After-load in funzione della velocità.
17
Capitolo 1
Fisiologia e modellistica dei muscoli scheletrici
Hill andò a misurare con un calorimetro il calore liberato dal muscolo nella
seconda fase dell’esperimento.
Due furono le conclusioni sperimentali a cui giunse:
a) Il calore liberato durante l’accorciamento in eccesso rispetto a quello
necessario al mantenimento della forza Po (fase 1) è proporzionale
all’accorciamento indipendentemente dalla forza.
∆H = a ( − ∆Lˆ )
Eq 1.1
Dove ∆H è l’incremento del calore addizionale, a è una costante caratteristica
di ogni muscolo che Hill interpretò come “calore di accorciamento”
b) La velocità di rilascio dell’energia (calore più lavoro in eccesso per il
mantenimento) è una funzione lineare della forza applicata al muscolo.
∆E& = b( P − Po)
Eq 1.2
La manipolazione di tali equazioni porta ad una relazione in cui compaiono solo
le variabili meccaniche P e V, rispettivamente forza e velocità di accorciamento.
( a + P ) ⋅ V = b ⋅ ( P − Po )
Eq 1.3
Hill propose quindi il suo modello come una combinazione in serie di due
elementi. Possiamo distinguere l’elemento elastico in serie SE”, che consiste in
una molla non lineare, con lunghezza e rigidità determinate dalla forza istantanea
del muscolo (eq 1.4), e l’elemento contrattile CE” caratterizzato da un’unica
relazione, tra la velocità di accorciamento e la forza istantanea (eq 1.5). Questa
separazione dell’elemento contrattile ed elastico del muscolo in due differenti
18
Capitolo 1
Fisiologia e modellistica dei muscoli scheletrici
entità fenomenologiche connesse in serie è la caratteristica fondamentale del
modello di Hill. Dal punto di vista della teoria del cross-bridge la separazione è
artificiosa, in quanto in realtà la struttura è contemporaneamente elastica e
contrattile ed è distribuita uniformemente nel tessuto contrattile.
Elemento serie SE
Elemento contrattile CE
P = − K ( P ) ⋅ ∆L
P = P0 −
P0 + a &
L
V +b
Eq 1.4
Eq 1.5
Possiamo provare a dare un’interpretazione dell’equazione ottenuta: la forza P
generata da CE è la somma della forza contrattile interna Po e della forza viscosa
resistiva Pv che dipende in modo non lineare dalla velocità.
Figura 1.8 Relazione Forza velocità dell’elemento CE sia per valori positivi che negativi di della
velocità di accorciamento. Per attivazioni massimali (solid line) non massimali (linea tratteggiata)
19
Capitolo 1
1.4
Fisiologia e modellistica dei muscoli scheletrici
Fusi neuromuscolari e riflesso di stiramento
I muscoli contengono recettori specializzati che sono in grado di fornire
informazioni circa lo stato del muscolo. Due in particolar modo sono importanti
per il controllo motorio: i fusi muscolari e gli organi tendinei del Golgi. I fusi
muscolari sono strutture allungate situate entro la parte carnosa del muscolo. Gli
organi tendinei del Golgi sonoposti nella giunzione tra le fibre muscolari ed il
tendine; sono connesse in serie ad un gruppo di fibre muscolari. I fusi sono dotati
di fibre muscolari proprie dette fibre intrafusali, in contrapposizione con le fibre
muscolari dette anche fibre extrafusali: come queste ultime anche le fibre
intrafusali hanno una innervazione efferente propria, costituita dagli assoni dei
motoneuroni gamma. La contrazione delle fibre intrafusali è estremamente debole
e non influisce in alcun modo sulla tensione del muscolo: esse hanno la sola
funzione di regolare la sensibilità delle terminazioni sensitive. Queste ultime sono
sensibili alle deformazioni meccaniche (meccanorecettori): lo stimolo adeguato
può essere rappresentato sia dallo stiramento dell’intero muscolo, e quindi anche
del fuso, sia dalla contrazione delle fibre intrafusali, che provoca l’accorciamento
del fuso neuromuscolare. D’altro canto la contrazione delle fibre extrafusali
provoca l’accorciamento del fuso e ne riduce l’eccitabilità: ciò avviene sia durante
la contrazione isotonica che durante la contrazione isometrica. Vi sono due tipi di
fibre intrafusali e due tipi di terminazioni sensitive in ciascun fuso: le fibre a
sacchetto di nuclei e le fibre a catena di nuclei . Esse sono innervate
rispettivamente da motoneuroni gamma dinamici e da motoneuroni gamma statici.
20
Capitolo 1
Fisiologia e modellistica dei muscoli scheletrici
Fig 1.9 Struttura delle innervazioni afferenti ed efferenti. I motoneuroni alfa e gamma generano il
potenziale per la contrazione. Le fibre afferenti (sulla destra) forniscono informazioni sullo stato
del muscolo. Non vengono elaborate dal cervello, ma si richiudono all’altezza del midolo,
formando quello che viene chiamato l’arco riflesso.
L’insieme delle connessioni afferenti ed efferenti e schematizzato nella figura 1.8
Riassumendo, la risposta delle terminazioni primarie è influenzata dalla velocità
di cambiamento della lunghezza del fuso, mentre quella delle terminazioni
secondarie è dominata dalla lunghezza del fuso. La sensibilità delle terminazioni
primarie è sotto l’influenza sia delle fibre motorie statiche che dinamiche, ma più
delle seconde; la sensibilità delle terminazioni secondarie è sotto l’influenza solo
delle fibre fusimotorie statiche. Il riflesso di stiramento è frutto proprio
dall’architettura assunta dall’innervazione delle fibre intrafusali. Tirando il
tendine, si provoca un’ azione riflessa di accorciamento. Tradizionalmente questo
comportamento viene associato al mantenimento della postura, come meccanismo
stabilizzante della posizione eretta. Parte di questo lavoro cercherà di mostrare
come in realtà il riflesso di stiramento sia insufficiente a produrre stabilità nel
sistema pendolo inverso. Il feedback negativo del riflesso ha sicuramente lo scopo
21
Capitolo 1
Fisiologia e modellistica dei muscoli scheletrici
di controllare e stabilizzare i movimenti, ma non può da solo contribuire alla
stabilità del sistema. Inoltre i ritardi di propagazione (sia delle fibre afferenti che
efferenti) suggeriscono che un sistema cosi retroazionato non consentirebbe la
stabilizzazione, ma occorrerebbe un controllo di tipo predittivo.
1.4.1 Gli organi tendinei del Golgi
Sono strutture collocate nella giunzione tra il muscolo ed il tendine, dove le fibre
che formano il tendine si connettono alle fibre muscolari. Sono innervati da un
singolo assone afferente del gruppo Ib (quelli più piccoli).
Fig 1.10 Organo tendineo del Golgi. La
posizione in serie alle fibre muscolari lo rende
adatto alla misurazione della forza agente
complessivamente sul muscolo, sia quella
dovuta all’elemento contrattile che quella
generata dallo stiramento del muscolo in
seguito al movimento.
22
Capitolo 1
Fisiologia e modellistica dei muscoli scheletrici
Lo stiramento del muscolo provoca la deformazione dell’organo tendineo con
l’effetto di produrre un potenziale d’azione nella terminazione nervosa. La
sensibilità è molto elevata e si ha attività non appena il muscolo ha una minima
contrazione, anche una sola unità motoria è sufficiente a produrre un segnale
afferente. La differenza sostanziale tra il comportamento dei due segnali riflessi
sta nella loro posizione strutturale rispetto al meccanismo di allungamento ed
accorciamento. I fusi sono in parallelo alle fibre mentre l’organo tendine in serie,
questo comporta che durante la fase di stiramento gli spindle siano in condizioni
di sparare, ed anche l’organo tendineo. Durante la contrazione i fusi diminuiscono
la loro frequenza di scarica, mentre il tendine si trova sottoposto ad un maggiore
stress con la conseguenza che si ha attività elettrica nell’organo tendineo in misura
maggiore che nel caso dell’accorciamento. Di fatto possiamo considerare che
quest’ultimo misuri in qualche modo la forza di contrazione del muscolo.
23