I.T.I.S «G. MARCONI» - PADOVA
Via Manzoni, 80 Tel.: 049.80.40.211 Fax 049.80.40.277
[email protected] www.itismarconipadova.it
Meccanica Applicata
Rel. 1.0
Data: 19-09-2012
Settore tecnologico – Indirizzo meccanica meccatronica ed energia
SERVIZIO DISPENSE E MATERIALE DIDATTICO
FORZE E SISTEMI DI FORZE
INTRODUZIONE
Qualche richiamo di fisica. Una forza è una grandezza fisica vettoriale che si manifesta
nell'interazione di due o più corpi, sia a livello macroscopico, sia a livello delle particelle
elementari, la sua caratteristica è quella di indurre una variazione dello stato di quiete o di moto dei
corpi stessi; in presenza di più forze, è la risultante della loro composizione vettoriale a determinare
la variazione del moto. La forza è descritta classicamente dalla seconda legge di Newton come
derivata temporale della quantità di moto di un corpo.
La forza è una grandezza vettoriale, ovvero è descritta da un punto di vista matematico da un
vettore (vedi algebra dei vettori). Ciò significa che la misura di una forza, ovvero la sua intensità
misurata in newton [N], rappresenta solo il modulo della forza, che per essere definita necessita
anche della specificazione di un punto di applicazione (il punto del corpo dove la forza agisce), di
una direzione (fascio di rette parallele) e di un verso (indicato dall'orientamento del vettore).
Il carattere vettoriale della forza consente di estendere completamente l'algebra vettoriale alle forze.
Attualmente il termine forza è considerato antiquato e non del tutto corretto, infatti la fisica
contemporanea preferisce usare il termine interazione.
Ad oggi ci sono note 3 interazioni fondamentali: l'interazione gravitazionale, l'interazione
elettrodebole e l'interazione forte.
Le forze come le intendiamo nella meccanica classica possono essere ricondotte o all'interazione
gravitazionale (es. forza peso) o all'interazione elettrodebole (forze di contatto).
I modelli utilizzati in questo corso tuttavia non necessitano di una specificazione così profonda e
per il resto della trattazione faremo uso del concetto classico di forza.
Anche in senso classico le forze però sono soggette a varie classificazioni utili ai fini applicativi.
Forze Esterne: agiscono esternamente a quella che noi consideriamo la superficie del corpo.
FE Attive: che hanno un valore loro proprio.
FEA di superficie: agiscono sulla superficie del corpo e possono essere distribuite su tutta o parte
della superficie, applicate su una linea, applicate su un punto (forze concentrate). Le ultime due
tipologie sono evidentemente dei modelli astratti di particolari situazioni applicative.
FE Vincolari: il cui valore dipende dal sistema di forze applicate al corpo, dalla geometria del
corpo e dalla tipologia e posizione dei vincoli.
FEV possono agire su di un punto (astrazione) o più raramente su di una linea o una superficie.
Forze Interne: agiscono internamente a quella che noi consideriamo la superficie del corpo.
1
Normalmente vengono modellizzate come distribuite ed assumono il nome di tensioni.
Un Sistema di Forze è l'insieme di tutte le forze che agiscono simultaneamente su un corpo.
Due sistemi di forze si dicono equivalenti se producono gli stessi effetti meccanici, se quindi è
possibile sostituire uno all'altro e viceversa senza che venga alterato lo stato di quiete o di moto del
corpo sul quale agiscono. In meccanica è prassi comune, di solito per facilitare i calcoli o per
evidenziare particolari effetti, sostituire un sistema di forze con uno equivalente.
MOMENTO DI UNA FORZA
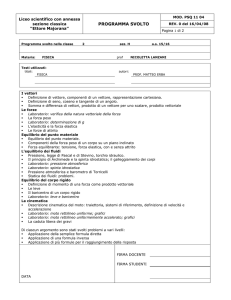
Riprendiamo la definizione di momento polare di una forza.
Se chiamiamo con F il vettore forza, O il polo di calcolo e con r il vettore che va da O al punto di
applicazione di F, allora il momento M sarà:
M=r xF
un vettore con le caratteristiche viste per il prodotto vettoriale.
Una proprietà notevole dei momenti è che se si trasla la forza F lungo la sua direttrice e si mantiene
fisso il polo di calcolo il momento non subirà alcuna variazione. In termini più rigorosi, data una
forza F ed un polo O, il momento di F rispetto ad O risulta invariante per traslazioni di F lungo la
sua direttrice.
In generale in un corpo agiscono più forze e più momenti, per studiare questi casi risulta di grande
utilità il teorema di Varignon il cui enunciato può così formularsi: il risultante dei momenti
meccanici applicati in uno stesso punto nel caso polare, corrisponde al momento meccanico della
risultante.
Come si avrà modo di constatare questo teorema ha una vasta casistica di applicazioni in
meccanica.
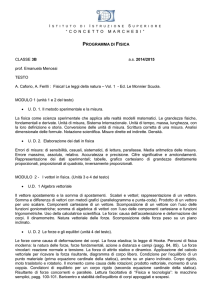
COPPIA DI FORZE
Si dice coppia di forze un sistema di forze costituito da due forze di uguale intensità/modulo,
direzioni parallele e versi opposti. A rigore è solo un caso particolare dei sistemi di forze ma la sua
importanza in meccanica è tale che merita una trattazione a parte.
2
Le coppie sono importanti nelle applicazioni perché riconducono ad un'azione che provoca una pura
rotazione di un qualche corpo. Un esempio estremamente importante in meccanica è la coppia
trasmessa dall'albero motore.
Le coppie godono di notevoli proprietà che ci consentono utili semplificazioni nelle applicazioni.
- Il risultante di una coppia è sempre nullo
- Il momento di una coppia di forze F che agiscono lungo due direttrici parallele distanti tra loro d
vale in modulo M = F · d indipendentemente dal polo scelto per calcolarlo. Se disegniamo una
coppia di forze su di un foglio il vettore momento da essa generato avrà direzione ortogonale al
foglio e con verso uscente se la rotazione è antioraria e verso entrante se oraria.
- Ad una coppia si può sempre sostituire un'altra coppia che generi lo stesso momento.
- Una coppia si può spostare su piani paralleli a quello di giacitura.
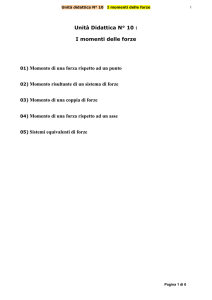
TRASLAZIONE PARALLELA DI UNA FORZA
Come abbiamo visto l'operazione di spostamento di una forza lungo la sua direttrice non genera
nessuna variazione nel momento che essa produce rispetto ad un polo di calcolo O. Vogliamo
adesso studiare un'altra importante operazione. Essa consiste nel trasportare un vettore forza F
parallelamente a sé stesso e dedurne le conseguenze. Trasportiamo quindi F nella posizione
parallela F', ora aggiungiamo una forza -F, agente nella stessa direzione di F ma in senso opposto.
Abbiamo ora F ed una coppia costituita da -F ed F' di momento M' = -Fd. Possiamo facilmente
dedurre che, affinchè lo spostamento di F nella sua nuova posizione F' avvenga senza modificare
gli effetti meccanici, alla forza F' dovrà essere aggiunto un momento concentrato (coppia) di valore
M = Fd in grado di annullare il momento M'. In altri termini una forza F può essere sì spostata
parallelamente dalla sua posizione senza che vi siano modifiche negli effetti meccanici purché si
aggiunga ad essa, nella nuova posizione, il cosiddetto momento di trasporto il cui modulo è pari al
prodotto della forza per la distanza di traslazione.
Riduzione di un sistema di forze ad un punto: quanto sopra detto può essere esteso
consentendoci di trasformare un sistema in uno più semplice meccanicamente equivalente e ridotto
ad un punto.
In particolare un sistema di forze è equivalente ad un sistema costituito da una forza applicata R ad
un punto P ed ad un momento Mr purchè:
R = Σ Fi
e
Mr = Σ Mip
3
Estendendo ulteriormente possiamo formulare, in modo generale, la condizione di equivalenza di
due sistemi di forze.
Dato un punto P se:
Σ F1i = Σ F2i
Σ M1ip = Σ M2ip
Allora i due sistemi sono meccanicamente equivalenti.
CONDIZIONE DI EQUILIBRIO DI UN SISTEMA DI FORZE
Molte applicazioni meccaniche richiedono che un sistema sia in equilibrio. Diamo quindi una
definizione elementare di equilibrio meccanico di un sistema.
Si dice che un sistema è in equilibrio meccanico quando in esso non si verificano alterazioni dello
stato di moto o di quiete del sistema stesso.
Questa definizione trova una traduzione quantitativa nelle seguenti equazioni:
Σ Fi = R = 0 e
Σ Mio = Mro = 0 (scelto un punto O qualsiasi)
queste equazioni possono scriversi più utilmente scomposte secondo tre assi coordinati opportuni.
Σ Fix = Rx = 0
Σ Fiy = Ry = 0
Σ Mixo = Mrxo = 0
Σ Miyo = Mryo = 0
Σ Fiz = Rz = 0
Σ Mizo = Mrzo = 0
Questa dispensa è distribuita secondo le licenze creative commons come indicato dall'etichetta qui sotto. Parti di questa dispensa sono state tratte da
internet avendo cura di utilizzare materiali liberi da copyright, se per errore fosse stato invece utilizzato materiale sotto licenza, si prega di contattare
immediatamente l'Istituto G. Marconi, allegando la documentazione di licenza così che i curatori abbiano modo di eliminare quanto non conforme alla
legge.
4