Elettrotecnica: appunti dalle lezioni parte
II
Antonio Massarini
Indice
1
2
Il campo elettromagnetico
3
1.1
Le leggi del campo elettromagnetico . . . . . . . . . . . .
3
1.1.1
Equazioni del campo in forma locale
3
1.1.2
Equazioni in forma integrale . . . . . . . . . . . .
1.2
Condizioni stazionarie
1.3
Condizioni quasi stazionarie
. . . . . . . . . . . . . . . . . . .
8
11
. . . . . . . . . . . . . . . .
11
1.3.1
Condizioni quasistazionarie elettriche . . . . . . .
11
1.3.2
Condizioni quasistazionarie magnetiche . . . . . .
12
1.4
Soluzione ai problemi di campo
1.5
Campo elettrico stazionario
1.6
Campo magnetico stazionario
. . . . . . . . . . . . . .
12
. . . . . . . . . . . . . . . .
12
. . . . . . . . . . . . . . .
13
Applicazioni magnetiche
17
2.1
Introduzione . . . . . . . . . . . . . . . . . . . . . . . . .
17
Comportamento magnetico dei materiali
2.2
. . . . . . . . .
18
Considerazioni energetiche . . . . . . . . . . . . .
22
Realizzazione pratica . . . . . . . . . . . . . . . . . . . .
27
2.2.1
2.3
2.4
3
. . . . . . .
2.3.1
Regime magnetostatico . . . . . . . . . . . . . . .
35
2.3.2
Forze magnetomotrici variabili . . . . . . . . . . .
38
Calcolo di auto e mutue induzioni . . . . . . . . . . . . .
41
Macchine elettriche
47
3.1
Introduzione . . . . . . . . . . . . . . . . . . . . . . . . .
47
3.2
Il trasformatore monofase
. . . . . . . . . . . . . . . . .
49
. . . . . . . . . . . . . . . .
49
3.2.1
Trasformatore ideale
3.2.2
Trasformatore reale . . . . . . . . . . . . . . . . .
51
3.2.2.1
Funzionamento a vuoto
. . . . . . . . .
53
3.2.2.2
Funzionamento nominale . . . . . . . . .
56
3.2.2.3
Funzionamento in corto-circuito . . . . .
59
iii
iv
INDICE
3.2.2.4
Circuiti equivalenti approssimati
. . . .
A Richiami di analisi vettoriale
A.1
Concetti introduttivi
A.2
Operatori dierenziali
63
. . . . . . . . . . . . . . . . . . . .
63
. . . . . . . . . . . . . . . . . . .
63
Operatori del primo ordine . . . . . . . . . . . . .
63
A.2.1.1
Gradiente . . . . . . . . . . . . . . . . .
63
A.2.2
Divergenza . . . . . . . . . . . . . . . . . . . . . .
65
A.2.3
Rotazionale o rotore
. . . . . . . . . . . . . . . .
65
A.2.4
Operatori dierenziali del secondo ordine . . . . .
66
A.2.1
A.3
59
Teoremi
. . . . . . . . . . . . . . . . . . . . . . . . . . .
68
Principi di conversione
dell'energia elettrica
1
Capitolo 1
Il campo elettromagnetico
1.1 Le leggi del campo elettromagnetico
In questo capitolo, vengono ripresi i risultati fondamentali dell'elettromagnetismo classico sui quali si basano gli argomenti trattati nei capitoli
successivi.
La nozione di
campo
si introduce per schematizzare gli eetti delle
interazioni a distanza come quelle che sperimenta, ad esempio, una carica
elettrica nell'attraversare, con velocità
v,
una regione di spazio in un
intervallo di tempo in cui agiscono le sorgenti del campo stesso.
Le
sorgenti del campo essendo costituite da distribuzioni non nulle di carica
elettrica e/o di densità di corrente elettrica nello spazio.
1.1.1 Equazioni del campo in forma locale
Il campo elettromagnetico dipende dalle sue sorgenti in maniera complessa: le relazioni intercorrenti tra i campi (eetti) e le relative sorgenti
(cause) sono esplicitate matematicamente dalle ben note equazioni di
Maxwell che, nel vuoto (in aria) ed in forma locale, si possono scrivere
~ ·E
~ =
5
ρ
ε0
~ ×E
~ = − ∂ B~
5
∂t
~ ·B
~ =0
5
~ ×B
~ = µ0 J~ + ε0 ∂ E~ .
5
∂t
3
(1.1)
4
CAPITOLO 1.
Nelle (1.1),
vamente:
grandezze:
~
E
e
~
B
IL CAMPO ELETTROMAGNETICO
rappresentano due campi vettoriali, ossia rispetti-
~
campo elettrico E,
e campo di
~.
induzione magnetica B
Le
ρ, ossia la densità volumetrica di carica elettrica, e J~, vettore
densità di corrente elettrica, rappresentano le sorgenti di tali campi.
Dalla sica, è noto che le unità di misura sono V/m (Volt su metro)
per il campo elettrico, T (Tesla) per il campo di induzione magnetica
-3
(detto anche, più semplicemente, induzione magnetica), Cm
-2
su metro cubo) per la densità volumetrica di carica e Am
(Coulomb
(Ampère su
metro quadrato) per la densità di corrente elettrica.
Le costanti
ε0
e
µ0
sono la costante dielettrica e la permeabilità mag-
netica del vuoto che si misurano in F/m (Faraday su metro) ed H/m
(Henry su metro) rispettivamente.
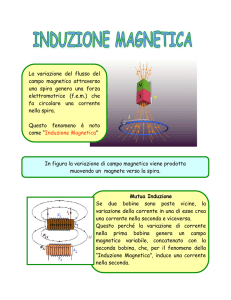
L'interazione che sperimenta una carica esploratrice,
q, di dimensioni
v, è
puntiformi, che si muova in un campo elettromagnetico con velocità
quella cosiddetta di Lorentz
~ + ~v × B).
~
F~ = q(E
(1.2)
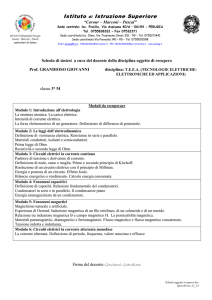
Si noti che a seconda del riferimento prescelto per rappresentare i
fenomeni, la (1.2) può ridursi al solo termine relativo al campo elettrico se il riferimento è solidale alla carica
q
per cui
~v = 0.
Si con-
sideri, in proposito la gura 1.1 in cui viene mostrata l'interazione che
una carica positiva puntiforme sperimenta muovendosi entro un campo
elettromagnetico con velocità diversa da zero rispetto ad un riferimento
inerziale.
Se la distribuzione di carica elettrica netta è pari a zero ma esiste
una distribuzione non nulla di densità di corrente
~
F~ = J~ × B.
J~,
la (1.2) diviene
(1.3)
All'interno dei mezzi materiali, si vericano gli ulteriori fenomeni
della polarizzazione nei confronti del campo elettrico e della magnetizzazione nei confronti dell'induzione magnetica. In particolare, la polarizzazione, introducendo una distribuzione di cariche che riduce la carica
complessiva, provoca un abbassamento del campo elettrico rispetto al
vuoto. In un mezzo lineare, la polarizzazione è proporzionale al campo
elettrico che l'ha prodotta, ossia
~
P~ = χe E,
dove
χe
(1.4)
rappresenta uno scalare adimensionale, per cui, nel dielettrico,
il campo elettrico può essere decomposto nella somma di due contributi
1.1.
5
LE LEGGI DEL CAMPO ELETTROMAGNETICO
E
qE
+q
v
qE xB
B
Figura 1.1: Componenti della forza di Lorenz agenti su una carica puntiforme in moto con velocità
v
rispetto ad un riferimento inerziale in una
regione di spazio in cui è presente un campo elettromagnetico.
6
CAPITOLO 1.
IL CAMPO ELETTROMAGNETICO
dei quali l'uno pari a quello prodotto dalla densità delle cariche libere,
l'altro dalla densità delle cariche di polarizzazione,
ρp .
La prima delle
equazioni di Maxwell si può riscrivere
~ ·E
~ = ρ + ρp ,
∇
ε0
da cui
~ ·E
~ = ρ + ρp ,
ε0 ∇
e, considerando le cariche vincolate quali sorgenti di un contributo di
polarizzazione
P~
del campo elettrico, si può scrivere
~ · P~ = ρp .
ε0 ∇
Per sostituzione e per la linearità dell'operatore di divergenza, si ottiene
quindi
~ P~ ) = ρ,
~ · (E−
ε0 ∇
ed inne, se vale la (1.4)
~ 0 (1 − χe )E
~ = ρ.
∇ε
Si denisce il vettore
~ = ε0 (1 − χe )E
~,
spostamento elettrico D
(1.5)
che si
misura in C/mq (Coulomb su metro quadrato), per cui si può, inne,
scrivere
~ ·D
~ =ρ
∇
(1.6)
nella quale compare a secondo membro solo la densità delle cariche
libere mentre tiene conto indirettamente della densità di carica di polarizzazione tramite la costante dielettrica propria di ciascun materiale
ε = ε0 (1 − χe ) = εr ε0
(1.7)
ε
la cosiddetta costante dielettrica relativa.
ε0
Un ragionamento analogo sulla capacità dei materiali di presentare
essendo
εr =
una densità di corrente di magnetizzazione sotto l'eetto di un campo di
induzione magnetica, porta a considerare anche per il campo di induzione
magnetica la dipendenza da due contributi distinti, ossia
~
~ × B = J~ + J~m ,
∇
µ0
1.1.
7
LE LEGGI DEL CAMPO ELETTROMAGNETICO
dei quali il primo,
J~, dovuto alle correnti libere, il secondo essendo relati-
vo alle correnti di magnetizzazione. Se il mezzo è lineare, si può denire
la magnetizzazione per unità di volume
~
M
legata alla densità di corrente
di magnetizzazione
~ ×M
~ = J~m ,
∇
e, pertanto, combinando le ultime due relazioni
~
~ ×M
~.
~ × B = J~ + ∇
∇
µ0
Per le proprietà dell'operatore
nabla, si perviene successivamente alla
~
~ ×(B −M
~ ) = J,
~
∇
µ0
che consente di denire il termine tra parentesi come un altro vettore
detto
campo magnetico
~
~ = B −M
~,
H
µ0
con dimensioni pari ad A/m. Secondo questo approccio, in ogni mezzo
lineare si può scrivere semplicemente
~ ×H
~ = J~
∇
che sostituisce l'ultima delle (1.1) entro i mezzi materiali lineari (per
semplicità si è considerato il caso stazionario).
La relazione tra
~
H
di legame materiale )
proporzionale ad
~,
H
e
~
B
nel mezzo materiale (la cosiddetta
si può ottenere assumendo
~,
M
equazione
per la linearità,
ossia
~ = χm H,
~
M
mediante un coeciente adimensionale,
(1.8)
χm , detto suscettività magnetica,
per cui
~
B
~
= (1 + χm )H,
µ0
e, pertanto,
~ = B,
~
µ0 (1 + χm )H
nella quale si può introdurre la permeabilità magnetica propria di ciascun
materiale:
µ = µ0 (1 + χm ) = µr µ0 .
8
CAPITOLO 1.
IL CAMPO ELETTROMAGNETICO
In conclusione, nei mezzi materiali le equazioni di Maxwell in forma
locale si possono scrivere
~ ·D
~ =ρ
5
~ ×E
~ = − ∂ B~
5
∂t
(1.9)
~ ·B
~ =0
5
~ ×H
~ = J~ +
5
~
∂D
.
∂t
A queste vanno aggiunte le equazioni di legame materiale
~ = E
~
D
~ = µH
~
B
per ciascun mezzo materiale attraversato dal campo elettromagnetico.
1.1.2 Equazioni in forma integrale
Integrando sul volume del dominio le equazioni di Maxwell in forma
locale i cui termini di sorgente sono densità volumetriche e sulla supercie
di contorno del dominio quelle i cui termini di sorgente sono densità
superciali, si ottiene dalla prima delle (1.9)
Z Z Z
~ · Ddτ
~
5
=
Z Z Z
τ
ρdτ,
τ
la quale, tramite il teorema della divergenza (o teorema di Gauss) (A.9)
applicato al primo membro, e osservando che il secondo membro rappresenta la quantità netta di carica contenuta nello spazio considerato,
diviene
I I
~ · ~ndS = Q.
D
(1.10)
S
La (1.10) asserisce che il usso del vettore spostamento elettrico attraverso una qualsiasi supercie chiusa è pari alla carica totale racchiusa entro
tale supercie. Questo risultato passa sotto il nome di
Legge di Gauss.
Analogamente, integrando su un volume la terza equazione in forma
locale:
Z Z Z
τ
~ · Bdτ
~ = 0,
5
1.1.
9
LE LEGGI DEL CAMPO ELETTROMAGNETICO
si ottiene, applicando ancora il teorema della divergenza sopra ricordato,
I I
~ · ~ndS = 0.
B
(1.11)
S
Quest'ultimo risultato attesta che l'induzione magnetica è un vettore le
cui linee non possono avere inizio o ne in punti interni ad una porzione
1
nita dello spazio, ossia che si tratta di linee chiuse .
In particolare,
tagliando (lungo una linea chiusa qualsiasi) la supercie chiusa
S
in due
Su ed Se tali che S = Su ∪ Se , si può scrivere
I I
Z Z
Z Z
~
~
~ · ~ndSe = 0,
B · ~ndS =
B · ~ndSu +
B
metà aperte
S
Su
Se
da cui si ricava
Z Z
~ · ~ndSu = −
B
Z Z
Su
~ · ~ndSe
B
Se
e, mutando l'orientazione originaria della normale alla supercie
Z Z
~ · ~ndSu = −
B
Su
Z Z
~ · (−~n)dSe =
B
Z Z
Se
Se ,
~ · ~ndSe
B
Se
che dimostra la costanza del usso del vettore
~
B
per qualsiasi supercie
che ammetta la stessa linea chiusa come contorno.
vettori a divergenza nulla
terminologia equivalente, solenoidali.
è tipica dei
Questa proprietà
o, come si suol dire con altra
Integrando la seconda equazione di Maxwell in forma locale su di una
supercie aperta qualsiasi si può scrivere
Z Z
~ × E)
~ · ~ndS = −
(5
S
Z Z
S
~
∂B
· ~ndS,
∂t
che, mediante il teorema di Stokes (A.10) applicato all'integrale a primo
membro, diviene
I
γ
1 Unica
~ · ~tdl = −
E
Z Z
S
~
∂B
· ~ndS.
∂t
eccezione è rappresentata da una linea che, pur restando contenuta entro
una porzione nita dello spazio, non si richiude su se stessa se non dopo inniti
passaggi che la vedono attraversare tutti gli inniti punti del dominio spaziale (linea
ergodica ).
10
CAPITOLO 1.
Se la linea
γ
IL CAMPO ELETTROMAGNETICO
non varia nel tempo, allora per la vericata solenoidalità
di
~,
B
S
ed è lecito anticipare la derivata
l'integrale a secondo membro non varia nel tempo per il variare di
I
Z Z
~ · ~tdl = − ∂
E
∂t
γ
dove il simbolo
φ
(1.12)
sta ad indicare il usso dell'induzione magnetica con-
catenato alla linea
il nome di
~ · ~ndS = − ∂φ ,
B
∂t
S
γ quale si evince dalla (1.12).
legge di Faraday-Neumann-Lenz
Questo risultato va sotto
o dell'
induzione elettrica.
A primo membro si riconosce una forza elettromotrice (o tensione)
che risulta prodotta, lungo la linea
γ , dalle variazioni, cambiate di segno,
del usso dell'induzione magnetica concatenato con la linea stessa. Ciò
signica che diminuzioni del usso concatenato sono responsabili di f.e.m.
di segno positivo e, viceversa, incrementi di usso concatenato provocano
f.e.m. di segno negativo (segno valutato rispetto all'orientazione positiva
γ ).
stabilita per la tangente della linea
Da ultimo, ripetiamo l'integrazione su una supercie aperta qualsiasi,
della quarta delle (1.9):
Z Z
~ × H)
~ · ~ndS =
(5
Z Z
(J~ +
S
S
~
∂D
) · ~ndS.
∂t
Applicando il teorema di Stokes al primo membro, si ottiene
I
~ · ~tdl =
H
Z Z
γ
(J~ +
S
~
∂D
) · ~ndS,
∂t
(1.13)
S può essere una qualsiasi tra le innite che si
linea γ. L'integrale a primo membro rappresenta la
in cui la supercie
ap-
poggiano alla
cir-
cuitazione del campo magnetico che funge da forza magnetomotrice.
Essa risulta proporzionale alla corrente totale concatenata con la linea
chiusa. La corrente totale è data dalla cosiddetta corrente di conduzione
Z Z
J~ · ~ndS,
S
e dalla corrente di spostamento
Z Z
S
~
∂D
· ~ndS.
∂t
Il risultato (1.13) va sotto il nome di
magnetico
o
legge della circuitazione del campo
legge di Ampère-Maxwell.
1.2.
CONDIZIONI STAZIONARIE
11
1.2 Condizioni stazionarie
In condizioni stazionarie, nei mezzi lineari le (1.9) si riducono al seguente
sistema
~ ·D
~ =ρ
5
~ ×E
~ =0
5
~ ·B
~ =0
5
(1.14)
~ ×H
~ = J,
~
5
dal quale si evince che, mancando i termini di sorgente legati alle derivate
temporali, il campo elettrostatico risulta irrotazionale (cioè a rotazionale
nullo) in tutto lo spazio e deriva soltanto dalla distribuzione delle cariche
elettriche, mentre il campo magnetostatico viene a dipendere solo dalla
distribuzione del vettore densità di corrente di conduzione.
1.3 Condizioni quasi stazionarie
Nel caso di fenomeni lentamente variabili, si è soliti parlare di condizioni quasi-stazionarie che risultano un'approssimazione che fa comodo
in molti casi. Per distinguere queste condizioni da quelle stazionarie propriamente dette, si distinguono condizioni quasi stazionarie elettriche, e
quasi stazionarie magnetiche, condizioni che possono essere realizzate
anche in particolari regioni spazio-temporali.
1.3.1 Condizioni quasistazionarie elettriche
Si vericano nelle regioni e negli intervalli in cui si può trascurare la
derivata del vettore spostamento elettrico, ossia le equazioni diventano
~ ·D
~ =ρ
5
~ ×E
~ = − ∂ B~
5
∂t
~ ·B
~ =0
5
~ ×H
~ = J.
~
5
(1.15)
12
CAPITOLO 1.
IL CAMPO ELETTROMAGNETICO
1.3.2 Condizioni quasistazionarie magnetiche
In analogia alle precedenti, nelle regioni dello spazio-tempo in cui è
trascurabile la sola derivata temporale dell'induzione magnetica, vale
il seguente sistema approssimato
~ ·D
~ =ρ
5
~ ×E
~ =0
5
(1.16)
~ ·B
~ =0
5
~ ×H
~ = J~ +
5
~
∂D
.
∂t
1.4 Soluzione ai problemi di campo
Di notevole importanza è la determinazione dei campi elettrico e/o magnetico in condizioni stazionarie e/o quasi-stazionarie. Per semplicità assumiamo di trattare il caso stazionario in cui vi è netta separazione tra
la determinazione del campo elettrico e quella del campo magnetico.
1.5 Campo elettrico stazionario
Se il dominio in cui esiste il campo elettrico è a connessione lineare sem2
plice , il campo è derivabile come gradiente
continua dello spazio detta
chiamiamo
V
3
di una funzione scalare
potenziale scalare.
Per consuetudine, se
la funzione potenziale scalare, si denisce
~
~ = −5V.
E
(1.17)
Introducendo questa espressione nella prima delle (1.14) si ottiene
~ · 5V
~ = −ρ
5
ε
in cui si è tenuto conto del fatto che
~ = εE
~.
D
(1.18)
La divergenza del gradiente
costituisce un operatore dierenziale del secondo ordine che prende il
2 Un
dominio si può denire tale quando una linea semplice chiusa contenuta al
suo interno può essere ridotta, per deformazione continua, ad un punto senza uscire
dal dominio né perdere la propria continuità.
3 Si faccia riferimento all'appendice A per i richiami fondamentali sugli operatori
che verrano introdotti da qui in avanti.
1.6.
13
CAMPO MAGNETICO STAZIONARIO
∆
nome di Laplaciano (simbolo
∇2 )
o più frequentemente
mediante il
quale la (1.18) si scrive nella forma
ρ
∇2 V = − ,
ε
detta
equazione di Poisson scalare.
(1.19)
Essa consente la determinazione del
potenziale incognito, nota la distribuzione delle sorgenti e le condizioni al
contorno sulla supercie al nito del dominio e/o di regolarità all'innito
se il dominio si estende all'intero spazio. In quest'ultimo caso la soluzione
per il potenziale vale
1
V =
4πε0
in ogni punto ad una distanza
r
Z Z Z
τ
ρ
dτ
r
(1.20)
molto grande rispetto alla regione
ρ.
in cui è distribuita la carica con densità volumetrica
τ
Ricordando la
(1.17), dal potenziale scalare si ottiene il vettore campo elettrostatico
~ 1
~ = −5
E
4πε0
Z Z Z
τ
ρ
1
dτ =
r
4πε0
Z Z Z
τ
ρdτ
~r
r2
(1.21)
avente direzione radiale in quanto le linee di livello del potenziale scalare
sono superci sferiche centrate nel punto (baricentro della distribuzione
delle cariche elettriche) in cui si può ritenere concentrata la carica distribuita nel volume
τ.
1.6 Campo magnetico stazionario
Il campo stazionario di induzione magnetica è governato dalle due equazioni
~ ·B
~ =0
5
(1.22)
~ ×H
~ = J,
~
5
dalle quali si evince che
~
B
è un vettore
indivergente
derivare come rotazionale da un potenziale vettore,
e può essere fatto
~4
A
ad un sol valore
e continuo, ossia si può porre:
~ × A.
~ =5
~
B
4 Ciò
(1.23)
vale a rigore nei domini a connessione superciale semplice per i quali ogni
supercie chiusa può essere ricondotta ad un punto per deformazione continua senza
uscire dal dominio e restando chiusa durante il processo di deformazione.
14
CAPITOLO 1.
IL CAMPO ELETTROMAGNETICO
Sostituendo nella seconda delle (1.22) si ottiene l'espressione
~ ×5
~ ×A
~ = µ0 J,
~
5
onde occorre ricordare che il doppio prodotto vettoriale si può scrivere
~ ×5
~ ×A
~ 5
~ · A)
~ = 5(
~ − 52 A,
~
5
ed essendo il potenziale vettore denito a meno del gradiente di uno
scalare arbitrario, si può denire il potenziale vettore mediante la scelta
(gauge) di Coulomb
~ ·A
~ = 0,
5
ossia si può scegliere un potenziale vettore indivergente tramite il quale
equazione di Poisson vettoriale
si ottiene l'
~ = −µ0 J.
~
52 A
A primo membro della (1.24) compare il cosiddetto
tore
(1.24)
Laplaciano vet-
che, nelle coordinate cartesiane ortogonali, si decompone nei tre
laplaciani scalari
52 Ax = −µ0 Jx
52 Ay = −µ0 Jy
52 Az = −µ0 Jz
che ammettono la soluzione dell'equazione di Poisson scalare. Per analogia, quindi, con la soluzione del campo elettrostatico nell'intero spazio,
anche la (1.24) ammette a suciente distanza dalla regione in cui sono
poste le sorgenti, la soluzione
~ = µ0
A
4π
Z Z Z ~
J
dτ
τ r
(1.25)
che consente di determinare il campo di induzione magnetica
~ ×
~ ×A
~ =5
~ = µ0 5
B
4π
Z Z Z ~
Z Z Z ~
J
µ0
J × ~r
dτ.
dτ =
4π
r2
τ r
τ
(1.26)
Un'osservazione di carattere puramente matematico, ma che risulta molto
comoda per gli sviluppi successivi, è quella che, in base alla (1.26),
consente di scrivere
~ =
dB
µ0 J~ × ~r
dτ
4π r2
(1.27)
1.6.
15
CAMPO MAGNETICO STAZIONARIO
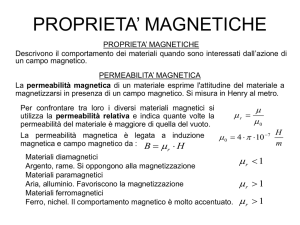
I
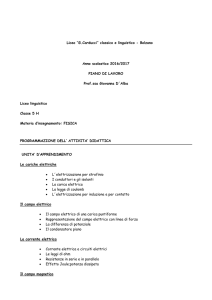
Figura 1.2: Campo di induzione magnetica (linee di usso in tratteggio)
prodotto da una corrente liforme circolare (spira).
detta
prima legge di Laplace.
La (1.27) consente di ricavare il campo di
induzione magnetica quando la geometria delle sorgenti è relativamente
semplice. E' ben noto, dai corsi di sica, come dalla (1.27) si ottenga,
ad esempio, la legge di Biot-Savart che stabilisce la distribuzione nello
spazio del campo magnetico prodotto da una corrente liforme rettilinea
ed indenitamente estesa. Rimandando ai testi di sica elementare per
la descrizione del procedimento, si ricorda sinteticamente il risultato che
tale campo ha una simmetria cilindrica e, in ogni piano normale al supporto della corrente
dalla distanza ,
r,
I,
ha, punto per punto, intensità che dipende solo
dalla sorgente ed è diretto, secondo quanto previsto
dal prodotto vettoriale, lungo la direzione ortogonale al piano passante
per la retta supporto della corrente ed il generico raggio vettore
la direzione,
φ,
tangente alla circonferenza di raggio
~ = I ~eφ .
H
2πr
r:
r, ossia
(1.28)
Se si considera una corrente avente per supporto una circonferenza, il
campo magnetico ammetterà come linea, tra le altre, la retta ortogonale
al piano della circonferenza e passante per il centro della stessa come
rappresentato in gura 1.2 nella quale vengono mostrate anche altre linee
quali si potrebbero ricavare dalla (1.27).
La distribuzione delle linee di usso di un campo denotano una diversa intensità del campo stesso. In particolare, il campo è più intenso
nelle regioni dello spazio in cui le linee sono più dense. Dalla gura è
16
CAPITOLO 1.
IL CAMPO ELETTROMAGNETICO
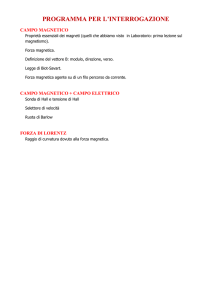
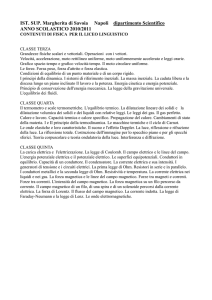
I
Figura 1.3: Campo di induzione magnetica (linee di usso in tratteggio)
prodotto da un solenoide.
facile convincersi che il campo è più intenso nella regione piana delimitata dalla spira giacché una linea del campo magnetico che tocchi un
punto qualsiasi dello spazio deve necessariamente essere concatenata con
la spira. Facendo circolare la corrente attraverso un elevato numero di
spire dello stesso raggio e concentriche (solenoide) come rappresentato
in gura 1.3, si accentua la dierenza di intensità tra il campo interno al
solenoide rispetto a quello esterno con il risultato di poter spesso trascurare il campo esterno (solenoide indenitamente esteso o chiuso su se
stesso a guisa di toro).
Capitolo 2
Applicazioni magnetiche
2.1 Introduzione
I fenomeni del campo magnetico quasi-stazionario sono sfruttati in importanti applicazioni che vanno dai
triche.
circuiti magnetici
alle
macchine elet-
I circuiti magnetici, essendo funzionali alla realizzazione delle
macchine elettriche, verranno illustrati per primi.
La denizione di circuito magnetico coincide con quella di
so dell'induzione magnetica.
tubo di us-
Nel capitolo precedente si è potuto vedere
quanto risulti complessa la determinazione del campo di induzione magnetica se le sorgenti non presentano particolari simmetrie geometriche.
Inoltre, il problema è reso più complicato dal fatto che l'induzione magnetica è in grado di invadere tutto lo spazio essendo anche il vuoto
magneticamente permeabile.
Si è visto come sorgenti del campo magnetico, dotate di un adatto supporto, consentano di concentrare il campo in determinate regioni
dello spazio rispetto ad altre.
Tuttavia se lo spazio è occupato da un
mezzo omogeneo, dicilmente questo eetto soltanto permette la sicura
determinazione di tutti i tubi di usso e quindi della rete magnetica corrispondente. E' quanto mai opportuno, quindi, esaminare le proprietà
magnetiche dei materiali di più comune reperibilità, allo scopo di valutare
la possibilità di facilitare la determinazione dei circuiti magnetici mediante la giustapposizione di opportuni materiali dotati di permeabilità
magnetiche assai dierenti tra loro.
17
18
CAPITOLO 2.
APPLICAZIONI MAGNETICHE
2.2 Comportamento magnetico dei materiali
A seconda della struttura microscopica, ogni materiale reagisce ad un
campo di induzione magnetica esterno esibendo una
magnetizzazione,
ossia un momento di dipolo magnetico netto per unità di volume. Se il
materiale è lineare, si è visto che la magnetizzazione è proporzionale al
campo magnetico
~
H
attraverso un coeciente adimensionale,
χm ,
detto
suscettività magnetica. Inoltre si può denire una permeabilità relativa
propria di ciascun materiale
µr = 1 + χ m .
In base ai valori della permeabilità relativa, i mezzi materiali si
possono suddividere in:
•
diamagnetici;
•
paramagnetici;
•
ferromagnetici.
Diamagnetici sono i mezzi materiali per i quali risulta
µr . 1,
ossia quando hanno suscettività magnetica modesta e di segno negativo.
Il diamagnetismo è tipico dei materiali per i quali i momenti magnetici
degli elettroni dovuti allo spin ed alla rotazione attorno al nucleo si compensano quasi totalmente. Ciò fa sì che il materiale sia poco sensibile
ad un campo magnetico esterno. Sono diamagnetici diversi metalli d'uso
comune in elettrotecnica (come il rame) e non metalli quali, ad esempio,
il silicio ed il cloruro di sodio.
Tuttavia la suscettività si mantiene in
−5
tutti i casi molto piccola in valore assoluto e dell'ordine di −10 . Sono
perfettamente diamagnetici (χm
1
I tipo
= −1)
i cosiddetti
superconduttori
del
in grado di espellere completamente dal loro interno un campo
2
stazionario di induzione magnetica .
Per i materiali paramagnetici risulta invece
µr & 1,
1A
questa categoria di superconduttori appartengono i metalli puri a temperature
prossime allo zero assoluto.
2 Ciò è rigorosamente vero entro un valore massimo del campo che dipende oltre che
dalla temperatura (purché al di sotto della soglia che determina superconduttività)
anche dalla densità di corrente che attraversa il superconduttore.
2.2.
19
COMPORTAMENTO MAGNETICO DEI MATERIALI
essendo dotati di un sia pur minimo grado di magnetizzazione per il fatto
che i momenti magnetici legati alle orbite e allo spin degli elettroni non
si compensano esattamente.
A dierenza del diamagnetismo, il para-
magnetismo dipende, in genere, anche dalla temperatura. I più comuni
mezzi paramagnetici sono l'aria, il platino, il tungsteno, il potassio ed altri che presentano suscettività magnetiche dipendenti dalla temperatura
−5
e variabili tra 10
÷ 10−3 .
Il ferromagnetismo, inne, si verica nei materiali che possiedono a
livello atomico momenti magnetici permanenti di notevole entità relativa.
La denominazione deriva dal fatto che il ferro è il primo materiale della
categoria di cui si siano osservate le proprietà magnetiche. La categoria
comprende, oltre al ferro, solo materiali metallici come, ad esempio, il
cobalto, il nickel, nonché leghe contenenti ferro e/o cobalto e/o nickel.
Questi materiali sono di estrema importanza tecnica tanto che si può
aermare che è grazie all'esistenza dei materiali ferromagnetici che è
possibile la realizzazione delle macchine elettriche che godono oggidì di
così ampia e varia diusione. A dierenza di tutti gli altri, i materiali
ferromagnetici presentano alcune caratteristiche peculiari:
•
raggiungono valori di magnetizzazione macroscopica assai elevati;
•
mantengono una elevata magnetizzazione residua anche dopo che
il campo magnetico esterno è stato rimosso (magneti permanenti);
•
possono perdere la loro magnetizzazione solo se portati al di sopra
di una temperatura limite (la cosiddetta
temperatura di Curie )
solitamente piuttosto elevata (ad esempio, per il Fe vale circa 770
◦
C);
•
hanno una relazione tra
~
B
ed
~
H
che
non è lineare.
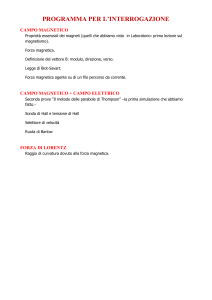
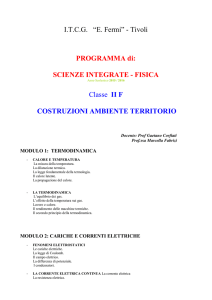
Quanto sopra evidenziato si può visualizzare mediante la curva sul piano
B
-
H
, caratterizzata da un andamento ciclico particolare, detto
di isteresi, un esempio della quale è mostrato in gura 2.1.
si può notare che l'induzione
~
B
aumenta notevolmente con
ciclo
Dalla gura
~
H
a partire
da una condizione iniziale in cui il materiale non è mai stato precedentemente sottoposto a campi magnetici. Con il progressivo aumentare del
campo magnetico, l'induzione tende ad aumentare meno velocemente
sino ad un valore (punto a in gura) oltre il quale aumenti successivi
di
~
H
comportano aumenti di
~
B
di entità relativamente molto minore,
20
CAPITOLO 2.
APPLICAZIONI MAGNETICHE
B
tratto lineare di saturazione
a
b
prima magnetizzazione
f
H
c
e
d
Figura 2.1: Ciclo di isteresi.
2.2.
COMPORTAMENTO MAGNETICO DEI MATERIALI
21
praticamente coincidente con gli aumenti che si registrano in aria. Questa è la condizione cosiddetta di
co.
saturazione
del materiale ferromagneti-
Sin qui, il tratto della caratteristica di magnetizzazione prende il
nome di curva di
prima magnetizzazione.
Se da questa situazione si
diminuisce progressivamente l'intensità del campo magnetico
~,
H
i valori
di induzione non diminuiscono secondo l'andamento visto prima, ma individuano punti dierenti tracciando un tratto di curva che interseca il
semiasse positivo delle ordinate in un punto b. In corrispondenza a tale
intersezione, si denisce
induzione residua
il valore di
~
B
che permane
anche quando il campo magnetico viene eliminato. Soltanto applicando
un campo magnetico inverso di intensità crescente, si ottiene una ulteriore diminuzione dell'induzione sino al suo annullamento che avviene
in corrispondenza al cosiddetto campo magnetico
coercitivo
(punto c).
Continuando ad aumentare l'intensità del campo magnetico, l'induzione
si inverte e la caratteristica passa nel terzo quadrante. Anche in questa
regione della caratteristica si assiste al fenomeno della saturazione che
si raggiunge per un valore assoluto del campo magnetico pari a quello
corrispondente alla saturazione nel primo quadrante della curva (punto
d).
Invertendo nuovamente il campo magnetico, si percorre un tratto
(d-e-f-a, secondo le frecce in gura 2.1) che va a chiudere la curva di
magnetizzazione ed è caratterizzato da simmetria di rotazione rispetto
al tratto precedente (a-b-c-d). Continuando a variare in maniera ciclica
il campo magnetico, l'induzione continua a ripercorrere i vari tratti della
stessa curva chiusa che prende il nome di
ciclo di isteresi
del materiale.
Dal punto di vista fenomenologico, il ciclo di isteresi si interpreta
ammettendo che nel materiale ferromagnetico siano presenti regioni di
dimensioni microscopiche (formate, tuttavia, da un enorme numero di
atomi) i cui atomi hanno tutti magnetizzazione equiversa. Tali regioni
sono denominate
domini di Weiss.
Nel caso in cui il materiale non sia
stato in precedenza sottoposto ad un campo magnetico (o sia stato portato alla temperatura di Curie), i vettori magnetizzazione dei domini sono
orientati casualmente in tutte le direzioni dello spazio, sicchè l'eetto
macroscopico netto è, appunto, quello di un materiale non magnetizzato.
L'azione di un campo magnetico esterno applicato al materiale comporta che i momenti magnetici dei domini tendono ad allinearsi a questo
come l'ago di una bussola. Per piccoli valori del campo applicato, questo
fenomeno risulta reversibile e l'annullamento del campo stesso riporta il
materiale allo stato iniziale. Se, tuttavia, l'intensità del campo esterno
viene aumentata, i domini tendono ad orientarsi in maniera permanente
22
CAPITOLO 2.
APPLICAZIONI MAGNETICHE
rimodellandosi e accorpandosi in parte tra loro modicando così la loro
struttura e dimensioni (le superci di contorno dei domini dette
di Bloch
pareti
si modicano permanentemente) e, soprattutto, mantenendo
un'induzione magnetica netta allineata al campo inducente anche quando quest'ultimo viene soppresso (induzione residua). Il fenomeno della
saturazione, che vede diminuire progressivamente la pendenza della curva (che rappresenta la permeabilità del materiale nei diversi punti della
curva che tende, inne, al valore
µ0 ),
si spiega con il fatto che quando
tutti i domini si sono allineati lungo la direzione del campo magnetico
applicato, il materiale non è più in grado di fornire un contributo all'aumento di
~
B
il quale, pertanto, da quel valore in poi può crescere solo con
la velocità con la quale cresce nel vuoto. Tipicamente la saturazione nei
materiali magnetici avviene fra 1 o 2 T che sono valori molto elevati se
paragonati all'induzione magnetica terrestre (da circa 20 a circa 70
µT
passando dall'equatore ai poli).
2.2.1 Considerazioni energetiche
A partire dall'energia prodotta dalla sorgente, che si può assumere quale
bipolo di tipo induttivo, esprimiamo l'energia immagazzinata dai vettori
del campo magnetico svincolandoci dalle variabili tensione e corrente del
bipolo induttivo. Ossia:
Z
t
Z
t
dφ
idt =
Wa (t) =
vidt =
N
dt
−∞
−∞
Z
φ
N idφ,
(2.1)
0
in cui si è tenuto conto della relazione tra usso magnetico concatenato
e tensione già vista nella parte I di questi appunti e che qui si riporta
per comodità:
v(t) = N
dφ
,
dt
dove si è tenuto distinto il valore del usso magnetico,
netico concatenato attraverso il numero di spire
N
φ, dal usso mag-
costante nel tempo.
Ricordando la legge della circuitazione di Ampere, secondo la quale
N i = Hl,
dove
l
è una qualsiasi linea chiusa ed, in particolare, qui si considera una
linea di usso del campo magnetico, e la relazione
dφ = SdB
2.2.
COMPORTAMENTO MAGNETICO DEI MATERIALI
23
B
H
Figura 2.2: Energia specica del campo magnetico.
tra usso magnetico ed induzione magnetica, in cui
S
rappresenta la
sezione normale del tubo di usso, possiamo riscrivere la (2.1) per un
generico tubo di usso
Z
B
lSHdB.
W (t) =
0
Notando, inne, che
lS
rappresenta il volume del generico tubo di usso,
è più interessante riferirsi all'energia per unità di volume
W (t)
=
Ws (t) =
Sl
Z
B
HdB.
(2.2)
0
Si noti dalla gura 2.2, che l'integrale che compare nella (2.2) può essere
interpretato come l'area in grigio. Da ciò si evince che l'area racchiusa dal
ciclo di isteresi rappresenta l'energia dissipata ad ogni ciclo per unità di
volume del materiale ferromagnetico. Tale energia è convertita in calore.
Ogni volta che un conduttore liforme avvolto attorno ad un nucleo ferromagnetico (che costituisce un induttore non lineare) viene alimentato
con corrente alternata, l'energia assorbita ad ogni semiperiodo è maggiore di quella restituita nel semiperiodo successivo in quanto una parte
dell'energia è dissipata per isteresi dal nucleo venendo da esso convertita in calore. Una formula semiempirica che lega la potenza dissipata
per unità di volume nel nucleo ferromagnetico alla frequenza, al valore
24
CAPITOLO 2.
APPLICAZIONI MAGNETICHE
B
B
H
H
(b)
(a)
Figura 2.3: Cicli di isteresi di materiale dolce (a) e duro (b).
massimo dell'induzione e alle caratteristiche del materiale (formula di
Steinmetz) è la seguente:
Ps,ist = ηf B α
Nella (2.3),
f
W/m3 .
(2.3)
indica la frequenza di variazione dell'induzione sinusoidale
il cui valore massimo è
B, α è un esponente compreso nell'intervallo [1.6,
2] che dipende del materiale;
η
è un coeciente che pure dipende dal
materiale.
I materiali ferromagnetici si dividono in due categorie a seconda che
il ciclo di isteresi sia sottile o largo come mostrato in gura 2.3. I materiali con ciclo di isteresi sottile sono detti
dolci
e si preferiscono per tutte
le applicazioni in corrente alternata o in tutti i casi in cui occorre minimizzare le perdite energetiche dovute a variazioni cicliche dell'induzione
magnetica, quelli invece che presentano un ciclo di isteresi ampio, e caratterizzato da un'elevata induzione magnetica residua ed un elecato campo
coercitivo, sono detti
duri
e trovano la loro principale applicazione per
la realizzazione di magneti permanenti. Nel caso dei materiali ferromagnetici duri,
α
ed
η
assumono valori relativamente più elevati.
Alcune
caratteristiche di materiali ferromagnetici dolci sono riportate in tabella
2.1.
In tabella 2.2, sono riportate le caratteristiche salienti di alcuni esempi di materiali ferromagnetici duri.
2.2.
25
COMPORTAMENTO MAGNETICO DEI MATERIALI
Tabella 2.1: Materiali ferromagnetici dolci
Materiale
Composizione
µr,max
Br
Ferro puro
Fe
250000
1.4
4
Lamiera dinamo
96% Fe, 4% Si
7000
0.8
40
permalloy
78.5% Ni, 21.5% Fe
50000
0.6
4
(T)
Hc
(A/m)
Tabella 2.2: Materiali ferromagnetici duri
Materiale
Composizione
Acciaio
Ferrite di
B |H|max
3
(J/m )
Br
(T)
Hc
(A/m)
1600
0.7
5000
BaO·6Fe2 O3
24000
0.8
140000
7% Al, 14.5%
32000
0.8
110000
95000
0.72
400000
143000
0.85
630000
bario
Alnico 8
Ni, 35% Co,
5% Cu, 5%
Ti, resto Fe
Composto di
Co e terre
rare
CobaltoSamario
Sm-Co5
26
CAPITOLO 2.
APPLICAZIONI MAGNETICHE
B
H
Figura 2.4: Curva di magnetizzazione normale.
I valori della permeabilità magnetica relativa dei materiali ferromagnetici variano lungo la curva di isteresi anche se, lontano dalla saturazione, si mantengono molto elevati.
zazione normale
Si denisce
curva di magnetiz-
la curva ottenuta a partire da diversi cicli di isteresi del
materiale ferromagnetico stabilizzati per diversi valori di ampiezza dei
campi
B
ed
H. Per chiarire questa denizione si consideri quanto rappre-
sentato in gura 2.4. In particolare, la curva in trateggio, che rappresenta
l'interpolazione tra i punti angolosi dei diversi cicli di isteresi, costituisce, appunto, la summenzionata curva di magnetizzazione normale. La
sua forma è molto simile a quella della curva di prima magnetizzazione
anche se, a dierenza di questa, si estende anche nel terzo quadrante.
Analizzando più in dettaglio la curva di magnetizzazione normale, si
può evincere che non si dà un solo valore per la permeabilità magnetica del materiale ferromagnetico, trattandosi di una curva non lineare.
Si può costruire un graco che fornisce il valore della permeabilità del
materiale in funzione di
H,
calcolato come tangente alla curva di mag-
netizzazione normale in ogni punto. Si ottengono curve di permeabilità
del tipo disegnato in gura 2.5 che evidenziano un valore massimo.
2.3.
27
REALIZZAZIONE PRATICA
µ
H
Figura 2.5: Curva di permeabilità magnetica.
2.3 Realizzazione pratica
Si è detto che un circuito magnetico è costituito da uno o più tubi di
usso del vettore induzione magnetica (tubi chiusi per la solenoidalità di
−
→
B statuita dalla terza equazione di Maxwell valida in tutte le condizioni
e per tutti i mezzi materiali). Se il vettore induzione magnetica incontra
mezzi a permeabilità diversa, le sue linee vanno incontro alla rifrazione in
corrispondenza alla supercie di separazione tra i mezzi. Dagli studi di
sica, è noto che (escludendo il caso particolare in cui si dia una densità
superciale di corrente diversa da zero all'interfaccia) la rifrazione delle
linee di
−
→
B
segue la legge
µr,1
tan γ1
=
tan γ2
µr,2
in cui
γ1
e
γ2
(2.4)
sono gli angoli di incidenza, riferiti alla normale alla super-
cie di separazione, di una linea di
−
→
B all'interfaccia visti rispettivamente
dal mezzo 1 e dal mezzo 2. Si veda, in proposito la gura 2.6. Dalla (2.4)
si può constatare che all'interfaccia tra un materiale ferromagnetico ad
elevata permeabilità (ad esempio ferro per il mezzo 1) e l'aria (mezzo
2), le linee di usso dal lato dell'aria, essendo
più piccolo di
tan γ1 ,
e quindi
γ2 ≈ 0,
tan γ2
relativamente molto
sono praticamente normali alla
γ1 ≈ 90◦ (ossia linee nel
supercie in tutti i casi eccetto quello in cui sia
mezzo 1 praticamente parallele alla supercie stessa).
In questo caso,
infatti, la (2.4) prevede linee ad elevati angoli di incidenza anche dal lato
dell'aria.
Da queste considerazioni, si evince che se le linee di usso corrono
parallelamente alla supercie del ferro, tali linee si possono considerare
28
CAPITOLO 2.
1
APPLICAZIONI MAGNETICHE
2
µ1
µ2
γ 2
γ1
Figura 2.6:
Rifrazione ad una supercie di interfaccia tra mezzi con
dierenti permeabilità magnetiche.
2.3.
29
REALIZZAZIONE PRATICA
S
I
n
B
µ0
N
l
µ
µ
0
(a) Circuito magnetico toroidale.
Figura 2.7: Circuito magnetico toroidale.
praticamente connate all'interno del ferro stesso. Infatti, se una linea
fuoriuscisse, per completare il suo percorso chiuso dovrebbe rientrare
successivamente nel ferro. Ma per fare ciò dovrebbe incontrare l'interfaccia in direzione normale compiendo quindi un percorso non plausibile
se la supercie di interfaccia è regolare ed indenitamente estesa. Invece
è plausibile per una linea in aria entrare all'interno del ferro in direzione
normale, rimanervi per un certo tratto e fuoriscirne successivamente in
direzione normale per richiudere il proprio percorso.
Si può pensare allora di realizzare una rete magnetica creando dei
percorsi chiusi con il ferro. Ovviamente tali percorsi non coincideranno
rigorosamente con gli eettivi tubi di usso dell'induzione magnetica,
ma, per quanto detto sopra circa gli eetti delle permeabiità relative del
ferro e dell'aria, ne rappresentano un ottima approssimazione.
Il caso più semplice di circuito magnetico su cui ragionare è quello
mostrato in gura 2.7. Il circuito in questione è costituito da un materiale ferromagnetico, di permeabilità
µ,
di forma geometrica toroidale.
Si suppone che l'avvolgimento, composto di
N
spire, sia distribuito uni-
formemente lungo il toroide. In questa situazione, è possibile ritenere,
con ottima aprossimazione, che tutte le linee dell'induzione magnetica
30
CAPITOLO 2.
APPLICAZIONI MAGNETICHE
risultino connate all'interno del toroide il quale funge quindi da circuito
3
magnetico. In particolare, il usso dell'induzione magnetica , denito in
generale dall'espressione
Z
φ=
−
→
B · ~ndS,
S
nel caso proposto, si può scrivere semplicemente
φ = Bmed S
essendo l'induzione magnetica un vettore con direzione coincidente con
quella della normale alla supercie
Bmed
si è indicato il valor medio di
S
B
e, pertanto,
−
→
B · ~n = B .
sulla supercie
circuitazione (1.13) applicata alla linea d'asse
l
S.
Con
La legge della
nelle speciche condizioni
prese a riferimento si scrive
− ~
→
H · tdl = N i,
I
(2.5)
l
interpretando il secondo membro della (1.13) come la corrente totale
l
concatenata con una generica supercie che si appoggia alla linea . La
densità di corrente è, infatti, non nulla solo all'interno delle spire dell'avvolgimento liforme dove vale, tra la densità di corrente,
intensità di corrente,
i,
−
→
J,
e la
la semplice relazione
−
→
J · ~ndS = i,
che, integrata sulla generica supercie
S
l
appoggiata alla linea , ove l'area
interessata è complessivamente attraversata
N
i
volte dalla corrente , for-
nisce proprio il secondo membro della (2.5). Non è dicile, tramite la
(2.5) evincere che per ogni altra linea interna al toroide, diversa dalla lin-
l
ea d'asse , il secondo membro, coinvolgendo grandezze esterne al toroide
medesimo, non varia e, pertanto il campo magnetico
−
→
H
ha intensità de-
crescente all'aumentare del raggio maggiore del toroide (ossia, a raggio
maggiore della linea corrisponde intensità minore del campo e viceversa
in misura inversamente proporzionale). Il valore sulla linea d'asse deve
3 Il
usso di induzione magnetica ha una propria unità di misura nel S.I. il Weber
(Wb). Talora l'induzione viene espressa in Wb/mq anzichè in Tesla (T).
2.3.
31
REALIZZAZIONE PRATICA
risultare, pertanto, intermedio tra tutti quelli possibili.
Inoltre, la di-
rezione del campo è, per la regola della mano destra, coincidente con la
tangente alla linea, pertanto
− ~
→
H · tdl = Hmed l.
I
l
Sostituendo nella (2.5)
H
mediante la legge di legame materiale con
Hmed l =
B:
Bmed
l,
µ
moltiplicando e dividendo per la supercie normale del circuito magnetico toroidale, otteniamo
SBmed
l
l=φ
= <φ
Sµ
µS
ed, in denitiva
N i = <φ.
La relazione (2.6) prende il nome di
la cosiddetta
riluttanza
(2.6)
legge di Hopkinson.
Essa denisce
del circuito magnetico:
<=
l
.
µS
(2.7)
Si noti la stretta rassomiglianza della (2.7) con l'espressione della resistenza elettrica relativa ad un tratto liforme di conduttore di lunghezza
l
e sezione normale
S
di conducibilità elettrica
σ4
che si riporta qui
per comodità
R=
l
.
σS
L'analogia formale tra la resistenza elettrica e la resistenza magnetica
(ossia la riluttanza) consente di rarontare la legge di Hopkinson (2.6)
alla ben nota legge di Ohm ponendo in evidenza le analogie tra grandezze
elettriche e magnetiche come riassunto in tabella 2.3. La corrispondenza
è valida nella condizione in cui la legge di Ohm è riferita ad un circuito
elettrico semplice costituito da una resistenza alimentata da una f.e.m.
di valore
e
come mostrato in gura 2.8. In tal caso, come descritto in
tabella, oltre alla corrispondenza tra resistenza e riluttanza, si possono
4 Si
ricorda che σ =
1
ρ
essendo ρ la resistività elettrica.
32
CAPITOLO 2.
APPLICAZIONI MAGNETICHE
Tabella 2.3: Corrispondenza tra grandezze elettriche e magnetiche.
Legge di Ohm
Legge di Hopkinson
e = Ri
N i = <φ
R
<
i
φ
e
Ni
i
+
e
_
R
Figura 2.8: Circuito elettrico analogo a quello magnetico di gura 2.7.
2.3.
33
REALIZZAZIONE PRATICA
φ
N
Ni
S
Figura 2.9: Schema circuitale del circuito magnetico di gura 2.7.
e, e f.m.m. (forza magnetomotrice ), Ni, come pure corrente elettrica, i, e usso di induzione mag-
far valere anche le corrispondenze f.e.m.,
netica,
φ.
Si può allora schematizzare gracamente il circuito di gura
2.9 con la sua rappresentazione analoga di gura 2.7.
Si ponga l'at-
tenzione sul fatto che il verso della f.m.m. deve essere ssato di volta in
volta utilizzando la regola della vite destrogira tenendo conto del verso di
entrata della corrente all'interno dell'avvolgimento e di come si avvolge
il lo conduttore attorno al toroide ferromagnetico. Si può usare anche
indice della mano de-
la regola della mano destra secondo la quale se l'
stra
punta il verso positivo della corrente con il palmo che abbraccia il
circuito magnetico, allora il pollice punta il verso positivo della f.m.m..
La legge di Hopkinson, derivata in un caso estremamente semplicato, viene estesa a strutture ferromagnetiche di forma geometrica più
complessa che possono anche presentare regioni in cui il materiale ferromagnetico è interrotto da traferri d'aria più o meno sottili. Naturalmente
questo comporterà l'assunzione di ipotesi semplicative che inuiranno
sull'accuratezza dell'analisi.
In gura 2.10 è rappresentato un circuito magnetico con traferro. La
struttura del circuito, fatto di materiale ad elevata permeabilità, è rettangolare o quadrata come pure la sua sezione normale. Inoltre l'avvolgimento percorso da corrente non è distribuito uniformemente su tutto
il circuito, ma solo su uno dei suoi lati. Ne deriva che l'andamento delle
linee dell'induzione magnetica può essere solamente ipotizzato sulla base
di alcune approssimazioni, in particolare:
34
CAPITOLO 2.
APPLICAZIONI MAGNETICHE
µ>> µ 0
B
l
I
traferro
µ
N
0
S
Figura 2.10: Circuito magnetico con traferro.
1. grazie all'elevata permeabilità della struttura ferromagnetica rispetto all'aria, si assume che tutte le linee di usso di
~
B
risultino co-
munque interamente connate all'interno del ferro (tranne, ovviamente, al traferro);
2. si assume che l'induzione magnetica abbia valore costante in ogni punto della generica sezione normale, con valore pari al valor
medio, e direzione secondo la tangente alla linea d'asse della struttura nel punto di intersezione con la sezione (come illustrato in
gura 2.10).
Nelle due ipotesi sopracitate, ci si riconduce al caso ideale di gura 2.7
e restano validi i risultati ricavati in quelle condizioni con particolare
riguardo alla legge di Hopkinson (2.6).
Occorre qui ulteriormente precisare che, a dierenza della resistenza
elettrica, la riluttanza non ha un valore costante in tutte le condizioni a
causa del comportamento magnetico dei materiali ferromagnetici, ossia
φ
< = < (µ) = < [µ (B)] = < µ
S
il che signica che la riluttanza dipende dalla permeabilità magnetica
che, a sua volta, dipende dall'intensità dell'induzione magnetica ossia,
per le due assunzione poste sopra, dal usso.
2.3.
35
REALIZZAZIONE PRATICA
B
H
a)
B
β
Bs
µ0=tan β
µ= tan α
α
H
b)
Figura 2.11: Curva di magnetizzazione normale a) e sua linearizzazione
b).
2.3.1 Regime magnetostatico
Nel caso magnetostatico, in cui non si manifesta il fenomeno dell'isteresi, si può avanzare un'ulteriore assunzione sul valore della permeabilità,
ovvero sulla relazione di legame materiale fra
si assume la
~
B
ed
~.
H
A tale proposito
curva di magnetizzazione normale, costruita come mostrato
in gura 2.4, che può essere, come ulteriore approssimazione, opportunamente linearizzata. Si veda in proposito la gura 2.11. Se l'intensità dell'induzione magnetica si mantiene al di sotto del valore di saturazione,
Bs
del materiale, si può assegnare un solo valore alla permeabilità magnetica
e la riluttanza assume un valore indipendente dal usso.
Vale la pena sottolineare che, scrivendo la (2.5) per ogni percorso
36
CAPITOLO 2.
APPLICAZIONI MAGNETICHE
chiuso di circuito magnetico formato da
n
X
n
tratti
Hk lk = N I
k=1
se il percorso è concatenato con una f.m.m.
n
X
N I,
altrimenti
Hk lk = 0.
k=1
Si osservi come queste relazioni siano le corrispondenti della legge delle
tensioni nelle reti elettriche per la quale si può scrivere
n
X
Vk = E,
k=1
se nella maglia è presente una f.e.m.
n
X
E, oppure
Vk = 0
k=1
in assenza di f.e.m.
lungo la maglia.
Inoltre, per la solenoidalità del
vettore induzione magnetica, stabilita dalla terza delle (1.16) possiamo
aermare che nei punti in cui la struttura magnetica si biforca, ossia nei
nodi del circuito magnetico, per i tubi di usso dell'induzione deve valere
r
X
Bk Sk = 0,
k=1
in cui la sommatoria è estesa a tutti i tratti che aeriscono al generico
nodo, ossia, ricordando la denizione di usso
r
X
φk = 0,
k=1
che può essere fatta corrispondere alla legge delle correnti ai nodi di una
rete elettrica
n
X
k=1
Ik = 0.
2.3.
37
REALIZZAZIONE PRATICA
δ
Figura 2.12: Linee di usso dell'induzione magnetica al traferro.
I termini della somma dei ussi prendono segno positivo o negativo a
seconda che si tratti di ussi uscenti o entranti rispettivamente nel nodo
allo stesso modo con cui si applica la
LC
ai nodi delle reti elettriche.
Risulta, pertanto, chiarito il fatto che ogni circuito magnetico può essere
trattato con gli stessi metodi già appresi a proposito delle reti elettriche
stazionarie.
Un approfondimento del discorso merita il traferro.
Al traferro, la
(2.6) è sempre lineare poichè la permeabilià al traferro non dipende dal
usso ma è costante di valore
µ0 .
La riluttanza del traferro, tuttavia, è
di qualche ordine di grandezza più elevata delle riluttanze del materiale
ferromagnetico insaturo. A motivo di ciò, e per gli eetti di bordo dovuti
alla limitata estensione della struttura, le linee di usso di
~
B
tendono
a deettere rispetto all'andamento seguito nel materiale ad elevata permeabilità come mostrato in gura 2.12.
Dalla gura si può osservare
un allargamento della sezione utile del circuito magnetico in corrispondenza al traferro. Si può tenere conto di questo fenomeno mediante un
opportuno coeciente
α>1
tale che
α=
in cui i pedici
aef
Sa
,
Sf
stanno ad indicare l'aria ed il ferro rispettivamente.
38
CAPITOLO 2.
B
APPLICAZIONI MAGNETICHE
corrente parassita
Figura 2.13: Correnti parassite nel nucleo ferromagnetico.
Un valore empirico di
del ferro,
Sf ,
del traferro.
α
lo si può ottenere aggiungendo alla supercie
una cornice di spessore pari alla metà della lunghezza
δ
Ciò equivale a sommare a ciascun lato della sezione (se
rettangolare) o al raggio (se circolare) la lunghezza
δ.
2.3.2 Forze magnetomotrici variabili
Se le f.m.m. variano nel tempo con andamento periodico, si manifesta il
fenomeno dell'isteresi che produce dissipazione di energia e, a questo, si
va ad aggiungere anche un ulteriore dissipazione di energia dovuta alle
cosiddette
correnti di Faucoult
(dette anche
correnti parassite )
indotte
nel materiale ferromagnetico che, in quanto ferroso, è dotato di una
conducibilità elettrica non nulla. In pratica, ciò che avviene nel nucleo
ferromagnetico è ben rappresentato in gura
B
lamierino di Fe
Figura 2.14: Nucleo laminato.
2.13.
Nella gura il verso delle linee di corrente è relativo ad un
aumento del valore dell'induzione secondo la ben nota lege di Faraday-
2.3.
39
REALIZZAZIONE PRATICA
Neumann-Lenz
e=−
in cui il usso
rente,
e
φ
dφ
dt
(2.8)
è quello concatenato con il percorso chiuso della cor-
è la f.e.m. indotta nel percorso chiuso in grado di muovere la
relativa corrente nel suo stesso verso per la legge di Ohm. Se il usso
diminuisce per un decremento del valore dell'induzione, la f.e.m.
e la
corrente indotte hanno verso opposto a quello mostrato in gura 2.13.
Per ovviare a questo inconveniente, che comporta una signicativa
dissipazione di energia, si ricorre alla laminazione del nucleo, il quale non
viene realizzato con materiale massiccio, ma con tanti sottili lamierini
sovrapposti, intervallati da sottilissimi strati di isolante tra uno e l'altro.
In questo modo le proprietà magnetiche del nucleo non vengono modicate, mentre le correnti parassite possono circolare in percorsi molto
ridotti, concatenare quote di usso inferiori e, per decrementare vieppiù
il fenomeno, il ferro del nucleo può venire drogato con silicio per aumentarne la resistività. In gura 2.14, è mostrato un nucleo ferromagnetico
laminato. Tanto più sottile risulta lo spessore dei lamierini, e tanto maggiore è la resistività, tanto minore è la potenza dissipata dalle correnti
parassite.
In pratica si realizzano lamierini con spessori che possono
variare tra i 0.2 e i 0.5 mm.
Vediamo come si può calcolare l'energia dissipata per correnti parassite nell'unità
di volume di un nucleo laminato. Si faccia riferimento alla gura 2.15.
Lo spessore, t , del lamierino risulta molto più piccolo dalla sua larghezza a .
Assumiamo, inoltre, per convenienza una lunghezza in direzione z pari ad una unità.
Consideriamo i percorsi delle correnti parassite contenuti nell'area in grigio avente
spessore elementare dy e che interseca l'asse y in corrispondenza ai valori ±y . La
lunghezza di questi percorsi si può approssimare con il valore 2a. La loro area con
2ya . Il usso intercettato da questi percorsi vale allora
ϕc = 2yaBM cos ωt.
(2.9)
In corrispondenza a questo usso, si produce una f.e.m. entro l'area in grigio pari a
e (y) = −
dϕc
= 2yaωBM sin ωt,
dt
il cui valore ecace è
E (y) =
2yaωBM
√
.
2
La resistenza del materiale compreso nell'area in grigio per unità di lunghezza vale
R (y) = ρ
2a
dy
40
CAPITOLO 2.
APPLICAZIONI MAGNETICHE
e la potenza dissipata nell'area in grigio per unità di lunghezza
P (y) =
2 2
2 2
E2
2a2 ω 2 BM
y
aω 2 BM
y
=
dy =
dy.
R
2ρa
ρ
Per ottenere la potenza complessivamente dissipata eseguiamo l'integrazione su
nell'intervallo [0, t/2] :
Z
Pcp =
0
t/2
2
aω 2 BM
P (y) dy =
ρ
Z
0
t/2
2
aω 2 BM
y dy =
3ρ
2
y
3
t
,
2
e, possiamo avere la potenza dissipata nel lamierino per unità di volume
pcp =
2 2
Pcp
ω 2 BM
t
=
.
at
24ρ
Un dierente approccio può essere
quello che fa ricorso direttamente all'equazione
lamierino di Fe
y
~
~ ×E
~ = − ∂B ,
5
∂t
che, proiettata nelle coordinate cartesiane e osservando che il termine di sorgente è diverso da zero solo lungo la
direzione z , fornisce l'unica equazione
scalare
x
za
BMcos ωt
∂Ex
∂Ey
−
= ωBM sin (ωt) .
∂y
∂x
Trascurando gli eetti di bordo, occorre
notare che, dato il sottile spessore dela
y
lamina, ∂E
∂x è trascurabile rispetto al
x
termine ∂E
∂y , per cui
t
Lamierino immerso in
campo di induzione variabile.
Figura
2.15:
∂Ex
= ωBM sin (ωt)
∂y
che è di immediata integrazione:
Ex (y, t) = ωBM sin (ωt) y.
Si ottiene poi la densità di corrente
Jx (y, t) = σEx = ωBM sin (ωt) y
che consente di ottenere la densità di potenza dissipata per eetto Joule
2
p(y, t) = σJx2 = σ [ωBM sin (ωt) y] ,
2.4.
41
CALCOLO DI AUTO E MUTUE INDUZIONI
che consente di ottenere il valor medio in un periodo ed entro lo spessore del lamierino
della densità di potenza dissipata per correnti parassite
pcp
11
=
T t
Z
11 2 2
=
σω BM
T t
t/2
−t/2
Z
T
Z
0
11
p(y, t)dydt =
T t
t/2
2
Z
y dy
−t/2
=
0
T
Z
t/2
Z
T
2
σ [ωBM sin (ωt) y] dydt
−t/2
0
1 1 2 2 t3
sin (ωt) dt =
σω BM
T t
12
2
1 2 2 t2 T
1
2 2
σω BM
=
σω 2 BM
t
T
12 2
24
Z
T
0
1 − cos 2ωt
dt
2
Wm−3 ,
che coincide on quella calcolata precedentemente.
Per comodità, le perdite per unità di volume di un materiale ferromagnetico laminato, soggetto ad induzione variabile nel tempo, comprensive sia dell'isteresi sia delle correnti parassite si riassumono nella
formula
p = αB 1.6 f + βB 2 f 2 ,
in cui il primo termine è rappresentativo delle perdite per isteresi, di
quelle per correnti parassite (Foucault) il secondo. L'esponente del primo
termine tende a 2 con l'aumentare dell'induzione (normalmente intorno
al valore di 1 T) e, quindi, le perdite hanno andamento parabolico con
f. Normalcifra di perdita, Cp , onnicomprensiva che fornisce
l'induzione e dipendono, inoltre, dal valore della frequenza
mente viene fornita una
la potenza dissipata per chilogrammo di materiale ferromagnetico quando sottoposto ad una induzione massima di 1 T (ossia 1 Wb/mq come
talora si usa indicare l'unità di misura dell'induzione magnetica) ed una
frequenza di 50 Hz.
2.4 Calcolo di auto e mutue induzioni
Nell'ambito del regime quasi-stazionario magnetico, è di un certo rilievo
il calcolo dell'autoinduzione relativa ad un avvolgimento che fornisce la
f.m.m. ad un circuito magnetico e/o della mutua induzione tra diversi
avvolgimenti che producono f.m.m. in uno stesso circuito magnetico. Per
esaminare meglio di che si tratta, si consideri la gura 2.16. Le f.m.m.
del caso proposto sono prodotte dalle correnti
avvolgimenti di gura aventi
N1
ed
N2
I1
ed
I2
circolanti negli
rispettivamente, secondo i versi
indicati. Dalla sica, sappiamo che il coeciente di autoinduzione,
L, è
42
CAPITOLO 2.
APPLICAZIONI MAGNETICHE
I2
I1
N1
N2
Figura 2.16: Circuito magnetico a due avvolgimenti.
denito da
L=
dove
φc
φc
,
I
I e concatenato
corrente I. Nel caso dei
è il usso totale prodotto dalla corrente
l'avvolgimento percorso dalla medesima
con
due
avvolgimenti di gura 2.16, vale quindi
L1 =
φ1c
I1
L2 =
φ2c
.
I2
Per poter calcolare i ussi, occorre risovere il circuito magnetico
facendo agire una corrente alla volta.
A questo scopo è conveniente
utilizzare il circuito elettrico equivalente nei due casi rispettivamente
indicati con a) e b) in gura 2.17.
Per calcolare il coeciente
L1 ,
si utilizza lo schema di gura 2.17 a).
Le dimensioni geometriche del circuito magnetico si suppongono note
come pure il valore della sua permeabilità e sono, quindi, facilmente
ricavabili le riluttanze dei tre diversi rami del circuito nell'ipotesi che la
5
sezione di ciascun ramo sia costante per tutta la sua lunghezza . Il usso
5 Se
ciò non fosse, ossia se ci fossero variazioni di sezione o traferri d'aria, occorre
suddividere il ramo in elementi omogenei di cui sia possibile ricavare la riluttanza
con la (2.7) e poi ricavare la riluttanza equivalente serie sommando tutte le riluttanze
lungo il ramo percorso dallo stesso usso.
2.4.
43
CALCOLO DI AUTO E MUTUE INDUZIONI
φ
2
2
1
3
φ
φ
1
N
3
N1I 1
S
a)
φ
2
2
1
3
φ
φ
1
S
N
3
N2I 2
b)
Figura 2.17: Analoghi elettrici del circuito magnetico di gura 2.16 per
il calcolo dei coecienti di auto e mutua induzione
44
CAPITOLO 2.
APPLICAZIONI MAGNETICHE
totale concatenato con l'avvolgimento in cui circola la corrente
I1
vale
φ1c = N1 φ1 .
Il usso
φ1 ,
prodotto dalla sola corrente
I1
va calcolato utilizando lo
schema a) di gura. Applicando la legge di Hopkinson, si può ricavare
φ1 =
N1 I1
,
<eq
in cui
<eq = <1 +
<2 <3
<2 + <3
è la riluttanza equivalente vista dal generatore di f.m.m..
Le relazioni
ricavate sopra, ci consentono di ricavare per l'autoinduttanza
L1 =
N2
φ1c
= 1.
I1
<eq
Con analogo procedimentosi ottiene per l'autoinduttanza
L2 =
L1
L2
N2
φ2c
= 2,
I2
<eq
dove questa volta
<eq = <2 +
<1 <3
<1 + <3
è la riluttanza equivalente vista dal generatore di f.m.m. nello schema
b) di gura 2.17.
Per il calcolo della mutua induzione si può usare
indierentemente lo schema a) o lo schema b) di gura 2.17. Utilizzando
lo schema a), il coeciente di mutua induzione tra i due avvolgimenti
M=
vale
M=
φ2c
I1
N2 φ2
N2 N1 I1 <3
=
,
I1
I1 <eq <2 + <3
(2.10)
dove l'ultima frazione rappresenta un partitore di usso (analogo al
partitore di corrente delle reti elettriche) ed inoltre
<eq = <1 +
< 2 <3
<2 + <3
2.4.
CALCOLO DI AUTO E MUTUE INDUZIONI
45
che, inserita nella (2.10) consente di ottenere
M=
N1 N2
<1 + < 2 +
<1 <2
<3
.
(2.11)
Procedendo, invece, mediante lo schema b), si denisce
M=
φ1c
I2
che si calcola nel modo seguente:
M=
N1 N2 I2 <3
N1 φ1
=
I2
I2 <eq <1 + <3
con
<eq = <2 +
< 1 <3
< 1 + <3
che, sostituita nell'espressione precedente, fornisce come risultato la (2.11).
Si osservi che i risultati ottenuti sono indipendenti dal fatto che le
f.m.m. siano costanti o variabili nel tempo, tuttavia se le f.m.m. sono
costanti i coecienti di auto e mutua induzione non trovano signicative
possibilità di applicazione.
Capitolo 3
Macchine elettriche
3.1 Introduzione
Per macchina si intende un sistema sico in grado di eettuare una conversione di energia. Tipicamente l'energia prodotta è di tipo meccanico,
ossia lavoro, a partire da energia di altra natura, ad esempio termica o
elettrica. Una macchina che utilizzi energia elettrica per produrre lavoro
meccanico o viceversa produca energia elettrica a partire da lavoro meccanico, si dice
macchina elettrica.
Tuttavia, occorre precisare che anche
qualora entrambe le energie in entrata ed in uscita dalla macchina sono
elettriche, ovviamente con proprietà dierenti l'una dall'altra, siamo di
fronte ad una macchina elettrica.
Occorre comunque richiamare l'at-
tenzione sul fatto che la termodinamica ci insegna che la conversione di
energia operata da qualsasi macchina non ha un rendimento del 100%,
ma una certa quota di energia viene dissipata dalla macchina stessa sotto
forma di calore. Lo schema di usso di una macchina è rappresentato in
gura 3.1 in cui le frecce rappresentano le energie in ingresso, in uscita
dalla macchina e dissipata sottoforma di calore.
Per quanto detto se
Ein
e/o
Eu
sono di natura elettrica, la macchina
è detta macchina elettrica. Più precisamente in tabella 3.1 sono riassunti
i casi che si possono presentare nella pratica . Motori e generatori sono
macchine elettriche con parti in movimento, i trasformatori sono, invece,
macchine statiche.
47
48
CAPITOLO 3.
Macchina
Ein
MACCHINE ELETTRICHE
Eu
Ed
Figura 3.1: Flussi energetici attraverso una macchina.
Tabella 3.1: Tipologia delle macchine elettriche
Natura di
Ein
Natura di
Eu
Tipo di macchina elettrica
Elettrica
Elettrica
Trasformatore
Elettrica
Meccanica
Motore
Meccanica
Elettrica
Generatore
3.2.
49
IL TRASFORMATORE MONOFASE
Nucleo ferromagnetico laminato
µ>> µ 0
B
l
i2
i1
v1
+
µ
N
−
+
0
1
v2
N
2
R
−
S
Avvolgimento
primario
Avvolgimento
secondario
Figura 3.2: Trasformatore monofase.
3.2 Il trasformatore monofase
Il trasformatore è una macchina che trasforma energia elettrica in energia elettrica con caratteristiche diverse in uscita e in ingresso.
Esso
può funzionare solo se le grandezze elettriche sono variabili nel tempo.
Esso è costituito da due avvolgimenti di lo conduttore accoppiati tra
loro mediante un circuito magnetico costituito da un nucleo ferromagnetico laminato. Una rappresentazione semplicata del trasformatore è
riportata in gura 3.2.
3.2.1 Trasformatore ideale
Nel caso ideale si considera che ci sia accoppiamento perfetto tra gli
avvolgimenti, ossia che tutte le linee di usso concatenate con l'avvolgimento primario sono concatenate anche con il secondario, che la riluttanza del materiale ferromagnetico e la resistenza degli avvolgimenti
conduttori siano trascurabili.
Per la tensione ai terminali del primario, la legge di Faraday-NeumannLenz fornisce
v 1 = N1
dφ
,
dt
in cui il segno negativo è assorbito dalla convenzione degli utilizzatori
50
CAPITOLO 3.
MACCHINE ELETTRICHE
poichè un aumento della f.m.m., cioè della corrente, provoca un aumento
del usso e, quindi, della tensione che ostacola l'ulteriore aumento della
corrente.
Al secondario, se l'avvolgimento, come s'usa, è collegato ad
un carico, la mutua direzione di corrente e tensione (che non rispetta
la c.d.u.
alla porta del secondario), e considerando il segno negativo
del usso concatento determinato dai terminali marcati con il cerchietto
nero, si determina che
dφ
v2 = − −N2
dt
= N2
dφ
dt
cioè, le tensioni degli avvolgimenti risultano avere sempre contemporaneamente i versi indicati in gura.
Si osservi che se le correnti sono stazionarie, per la (??) anche i ussi
lo sono e, di conseguenza, le tensioni ai capi degli avvolgimenti sono
entrambe nulle.
Il funzionamento del trasformatore è quindi presente
soltanto quando le grandezze elettriche variano nel tempo.
In questo
caso, le equazioni di macchina si possono scrivere:
=0
v1 − N1 dφ
dt
v2 − N2 dφ
= 0,
dt
(3.1)
relativamente ai due avvolgimenti, mentre per il nucleo magnetico, la
legge di Hopkinson, considerando nulla la riluttanza del nucleo fornisce,
con i versi delle correnti indicati in gura
N1 i1 − N2 i2 = 0.
Applicando al primario una tensione sinusidale
v1 (t) =
√
2V1 cos ωt,
dalla prima delle (3.1) si ottiene
√
φ(t) =
2V1
sin ωt
N1 2πf
che, introdotta nella seconda, fornisce
√
v2 (t) = N2
2V1
N2
cos ωt =
v1 (t).
N1
N1
(3.2)
3.2.
IL TRASFORMATORE MONOFASE
51
Da quest'ultima espressione si ricava la prima relazione fondamentale del
trasformatore ideale
v1
N1
=
,
v2
N2
(3.3)
ossia il rapporto tra le tensione coincide con il rapporto spire. Si ricordi
che, nella prima parte di questi appunti, trattando del trasformatore
ideale, si è attribuita a questo doppio bipolo una relazione di denizione
che comprendeva l'espressione
v1 = nv2
nella quale
n
è stata chiamata rapporto di trasformazione. Dalla (3.3) si
vede, dunque, che il rapporto di trasformazione del trasformatore ideale
monofase, coincide con il suo rapporto spire.
Dalla (3.2) si ricava per le correnti:
N2
i1
=
,
i2
N1
(3.4)
che si accorda con quanto stabilito circa la seconda equazione della
relazione di denizione del trasformatore ideale.
Le relazioni ricavate in questo paragrafo riguardano i valori istantanei
delle variabili, pertanto sono valide anche per i valori ecaci di grandezze
sinusoidali e, quindi, sono riscrivibili anche in termini fasoriali:
V̂1
V̂2
=
N1
N2
N2
Iˆ1
=
.
N1
Iˆ2
(3.5)
(3.6)
Per il usso magnetico ha importanza il valore massimo (anzichè il
valore ecace) perchè da questo dipende il raggiungimento della saturazione del materiale ferromagnetico.
3.2.2 Trasformatore reale
Si noti che la (3.4) prevede che, nel caso in cui il secondario sia mantenuto
a vuoto, la corrente primaria sia nulla. Ciò in realtà non si verica, in
quanto esistono sempre dei fenomeni di perdita nel circuito magnetico
per i quali una, sia pure modesta, percentuale della corrente primaria
52
CAPITOLO 3.
MACCHINE ELETTRICHE
B
i1
t
tensione primaria
corrente primaria
Figura 3.3: Eetto dell'isteresi sulle forme d'onda di tensione e corrente.
nominale viene assorbita dal trasformatore anche con il secondario a
vuoto. Nella realtà cioè
N2 ˆ
I2
Iˆ1 = Iˆ10 +
N1
(3.7)
in cui la relazione si è scritta in termini fasoriali in quanto l'utilizzo del
trasformatore avviene essenzialmente in regime sinusoidale.
Per ottenere delle relazioni che meglio rispecchino il trasformatore
reale, occorre rimuovere le ipotesi di idealità avanzate al precedente
paragrafo.
Innanzitutto, la permeabilità non innita del nucleo ferro-
magnetico determina che l'accoppiamento tra gli avvolgimenti non sia
perfetto ed, inoltre, occorre precisare che la caratteristica di magnetizzazione dinamica del materiale ferromagnetico prevede l'isteresi e, pertanto, alimentando il primario con una tensione sinusoidale, esso assorbe
una corrente solo in prima approssimazione sinusoidale a causa della forma del ciclo di isteresi tale che, se la proiezione dei suoi punti lungo uno
degli assi varia sinusoidalmente, la proiezione degli stessi punti lungo
l'altro asse ha un andamento distorto rispetto a quello sinusoidale.
Si
veda quanto mostrato in gura 3.3 in cui, per convenienza, si è scelto di
rappresentare le grandezze dell'avvolgimento primario a parità di valor
massimo per facilitare il confronto tra le diverse forme d'onda.
Se l'accoppiamento non è perfetto, signica che non tutte le linee di
usso prodotte dalla corrente primaria (vista come f.m.m.) si concatenano anche con la corrente secondaria e viceversa. Quindi una parte delle
3.2.
53
IL TRASFORMATORE MONOFASE
linee di usso prodotte da ciascuna corrente si richiuderanno, attraverso
l'aria, concatenandosi solo con quella corrente. A motivo di ciò, i ussi
concatenati con ciascun avvolgimento possono non coincidere e si può
allora scrivere
φc1 = −N1 φ + Ld1 i1
per il usso concatenato con il primario e
φc2 = −N2 φ + Ld2 i2
per quello concatenato con il secondario, dove con
usso comune ai due avvolgimenti e con Ld
autoinduzione di dispersione con un pedice
all'avvolgimento corrispondente.
φ
viene indicato il
si indica un
coeciente di
aggiuntivo che lo riferisce
Le equazioni di macchina si possono
allora scrivere
v 1 − N1
di1
dφ
− Ld1
− R1 i1 = 0,
dt
dt
di2
dφ
+ Ld2
+ R 2 i2 = 0
dt
dt
dove R1 ed R2 rappresentano
(3.8)
v 2 − N2
per i due avvolgimenti,
(3.9)
le resistenze del-
l'avvolgimento primario e del secondario rispettivamente, e
N1 i1 − N2 i2 = <φ
(3.10)
per il nucleo ferromagnetico.
In regime sinusoidale, le precedenti si scrivono in termini fasoriali
3.2.2.1
ω
V̂1 = (R1 + jXd1 ) Iˆ1 − jN1 √ φ,
2
(3.11)
ω
V̂2 + (R2 + jXd2 ) Iˆ2 = jN2 √ φ,
2
(3.12)
<
N1 Iˆ1 − N2 Iˆ2 = √ φ.
2
(3.13)
Funzionamento a vuoto
Il funzionamento più semplice da considerare è quello a vuoto per il quale
Iˆ2 = 0.
In questo caso la corrente primaria si riduce a qualche percento
54
CAPITOLO 3.
MACCHINE ELETTRICHE
del suo valore nominale per cui le cadute da essa provocate nell'avvolgimento primario, già piccole nel funzionamento nominale, divengono del
tutto trascurabili, ossia
ω
ω
V̂1 = (R1 + jXd1 ) Iˆ10 + jN1 √ φ ∼
= jN1 √ φ
2
2
ed essendo
(3.14)
ω
V̂20 = jN2 √ φ
2
si ottiene che il rapporto delle tensioni a vuoto con ottima aprossimazione
coincide con la (3.5).
Le perdite nel ferro, dovute ad isteresi e a correnti parassite nei
lamierini, dissipano potenza anche a vuoto dal momento che il usso principale dipende dalla tensione primaria che può assumere il suo
valore nominale. La potenza complessa assorbita a vuoto dal primario
nell'ipotesi che esso si trovi alla tensione nominale vale:
ω
∗
∗
∗
=
V̂1 Iˆ10
= (R1 + jXd1 ) Iˆ10 Iˆ10
+ jN1 √ φIˆ10
2
ω
2
∗
2
= R1 I10
+ jXd1 I10
+ jN1 √ φIˆ10
2
da cui possiamo dire che il termine
2
R1 I10
rappresenta la potenza dissi-
pata per eetto joule sull'avvolgimento. Essa è trascurabile in quanto la
corrente primaria a vuoto è molto piccola. Altrettanto dicasi per il ter2
mine reattivo Xd1 I10 . Per quanto riguarda l'ultimo termine, si può dire
che se Iˆ10 , o una sua componente, è in fase con il usso esso rappresenta una potenza reattiva (si osservi che il termine è preceduto dall'unità
immaginaria) e può essere interpretata come una
Iˆµ
corrente magnetizzante
ossia come quella corrente che serve per stabilire il usso (f.m.m.),
mentre per rendere conto delle perdite nel ferro, occorre supporre una
componente in quadratura anticipo di
Iˆa ,
Iˆ10 , che chiamiamo corrente attiva,
il cui fasore coniugato moltiplicato per l'unità immaginaria fornisce
un valore reale e, quindi, una potenza attiva assorbita dall'avvolgimento
e dissipata nel nucleo
ωN1 φIa .
Si può adottare una utile rappresen-
tazione circuitale del trasformatore quale quella mostrata in gura 3.4.
Con l'ausilio del circuito equivalente risulta immediato scrivere
Iˆ10 = Iˆa + Iˆµ
3.2.
55
IL TRASFORMATORE MONOFASE
I1
R1+jXd 1
I’1
N1/N2
R2+jXd 2
I2
I10
V1
R0
E1
X0
Ia
E2
V2
Iµ
Figura 3.4: Circuito equivalente del trasformatore reale.
che, introdotta nell'equazione per il nucleo ferromagnetico, scritta in
termini di fasori e con il secondario a vuoto, porge
<
N1 Iˆ10 = N1 Iˆµ + N1 Iˆa = √ φ + jK 0 φ.
2
Nell'espressione che precede si sono distinte: la f.m.m.
(3.15)
che produce il
usso, secondo la legge di Hopkinson,
<
N1 Iˆµ = √ φ
2
e la corrente assorbita per le perdite nel nucleo
N1 Iˆa = jK 0 φ,
dalla quale si può porre
Ia =
K 0φ
.
N1
Ricordando che la potenza assorbita per le perdite nel ferro vale
PF e = ωN1 φIa
sostituendo l'espressione della corrente attiva ricavata sopra
PF e = ωK 0 φ2 = Kω 2 φ2
dove si è fatta la posizione
K = K 0 /ω .
In pratica la corrente attiva è
assai più piccola della corrente magnetizzante. La (3.15) si può anche
scrivere in forma più compatta
nella quale si è fatta la
˙
N1 Iˆ10 = <φ
˙ = < + jK 0 .
posizione <
(3.16)
56
CAPITOLO 3.
3.2.2.2
MACCHINE ELETTRICHE
Funzionamento nominale
Quanto ottenuto sin qui per le perdite nel ferro resta valido anche nel funzionamento nominale del trasformatore. Si può osservare, innanzitutto,
che la (3.13) si può utilmente riscrivere
N1 Iˆ1 − N2 Iˆ2 = N1 Iˆ10
(3.17)
e, quindi, essendo la corrente a vuoto trascurabile nel funzionamento
nominale, ne discende che la relazione (3.6) è ben approssimata in questa
situazione. Il funzionamento nominale si ottiene collegando al secondario
un'opportuna impedenza
Ż ,
per cui si può aggiungere alle (3.11)-(3.12)
anche la relazione
V̂2 = Ż Iˆ2 ,
(3.18)
e si possono determinare, a partire dal secondario e andando a ritroso
verso il primario, tutte le grandezze fasoriali del trasformatore utilizzando o le equazioni di macchina o il circuito equivalente che le visualizza.
Queste grandezze possono essere tracciate sul piano complesso tramite
il cosiddetto
diagramma polare
del trasformatore quale quello mostrato
in gura 3.5.
In gura sono indicati i fasori delle varie grandezze, in cui gli angoli
tra i fasori non corrispondono ad uno caso reale, ma sono stati esagerati
per chiarezza della gura.
Partendo del usso, la cui fase si è assunta nulla per comodità, si
possono ottenere le f.e.m. primaria e secondaria
√
Ê1 = jωN1 ϕ/ 2 e Ê2 =
√
jωN2 ϕ/ 2 mentre,
√ per maggior chiarezza, nella gura si è riportato
−Ê2 = −jωN2 ϕ/ 2. Dalla (3.12) combinata con la (3.18), si ottiene
Iˆ2 =
Ê2
Ż + (R2 + jXd2 )
che può essere riportata sul diagramma nel terzo quadrante e ribaltata,
come si deve, nel primo quadrante (si ricordi che il segno della f.e.m.
secondaria è stato cambiato per chiarezza di rappresentazione). In seguito, dalla conoscenza di
Iˆ2
fasore della corrente primaria
e di
Iˆ1 .
Iˆ10 1
e mediante la (3.17) si ottiene il
Da questa, conoscendo i parametri del
primario si giunge alla determinazione della tensione primaria.
Nel caso del funzionamento a vuoto, la corrente secondaria è nulla e
il diagramma del funzionamento si riduce all'esempio rappresentato in
gura 3.6.
1 Grazie
alla (3.16).
3.2.
57
IL TRASFORMATORE MONOFASE
Im
V1
Xd1I1
Re
R 1I 1
E1
N2 I
N1 2
I1
I 10
φ
−R I2
−I2
V2
−X2 I2
−R2 2I
−Xd 2 I2
−E2
Figura 3.5: Diagramma fasoriale del trasformatore.
58
CAPITOLO 3.
MACCHINE ELETTRICHE
Im
V1
E1
Xd1I10
Re
R 1I 10
I 10
φ
−E2 = V2
Figura 3.6: Diagramma fasoriale del trasformatore a vuoto.
3.2.
59
IL TRASFORMATORE MONOFASE
3.2.2.3
Funzionamento in corto-circuito
Il funzionamento in corto-circuito non è fra quelli normalmente previsti ma riveste un notevole interesse teorico per la determinazione del
rendimento della macchina.
Se il primario viene alimentato con la sua tensione nominale, il cortocircuito nell'avvolgimento secondario richiama delle intensità di corrente
al secondario e, attraverso la (3.6), al primario pericolose per la macchina. Per evitare ciò, occorre alimentare il primario con una tensione opportunamente ridotta rispetto al suo valore nominale. Il funzionamento
in corto-circuito che ha interesse pratico è quello in cui la tensione primaria viene scelta in modo da fare circolare entro gli avvolgimenti le
correnti nominali del trasformatore.
Il valore di tensione che realizza
questo funzionamento è detto tensione di corto-circuito ed indicato con
la notazione
V1cc . In queste condizioni le perdite nel ferro, in quanto pro-
porzionali al usso e, quindi, alla tensione primaria secondo la (3.14),
risultano molto piccole, mentre le perdite nel rame, calcolabili con la
relazione
PCu = R1 I12 + R2 I22 = R1 I12 + R2
N12 2
I = R1cc I12
N22 1
dove si è posto
R1cc
N12
= R1 + R2 2 ,
N2
corrispondono alle perdite che caratterizzano il funzionamento nominale
in quanto le correnti sono quelle nominali. La tensione di corto-circuito
risulta, di norma, a seconda della potenza del trasformatore, da qualche
percento della tensione nominale per le macchine di potenza più elevata,
sino a poco più del 10% nelle macchine di minore potenza.
3.2.2.4
Circuiti equivalenti approssimati
Il circuito equivalente del trasformatore mostrato in gura 3.4 è per
taluni funzionamenti inutilmente complesso per il grado di accuratezza
richiesto.
Si suole, pertanto, far ricorso a circuiti equivalenti via via
più semplici a seconda del grado di accuratezza richiesto nei diversi casi
pratici.
Innanzitutto occorre rilevare che le impedenze
X0
ed
R0 , dette impe-
denze trasversali, sono molto più elevate (di alcuni ordini di grandezza)
60
CAPITOLO 3.
MACCHINE ELETTRICHE
delle impedenze cosiddette longitudinali quali le resistenze e le reattanze
di dispersione degli avvolgimenti.
Infatti, mentre queste ultime sono
solitamente molto piccole, per quelle citate per prime si ha:
√
Ê1
jωN1 φ/ 2
,
jX0 =
=
<φ
Iˆµ
N1
da cui si ottiene
ωN 2
X0 = √ 1 .
2<
2
Essendo la riluttanza del nucleo magnetico sempre molto piccola , ne
deriva che la reattanza magnetizzante è molto elevata.
Analogamente
per la resistenza a vuoto, che tiene in conto le perdite nel ferro,
PF e ,
si
ha
R0 =
PF e
PF e
=
,
E12
Ia2
2
R0
dalla quale si ricava facilmente
R0 =
E12 ∼ V12
=
PF e
PF e
che, essendo anche le perdite nel ferro molto piccole, rendono la resistenza
a vuoto relativamente assai elevata.
Il parallelo delle due impedenze
trasverse resta comunque elevato e, pertanto, non si commette un errore
molto elevato anticipando tali impedenze nella rete equivalente come
mostrato in gura 3.7.
Tale rete equivalente prende il nome di rete a
gamma, dal collegamento tra impedenze trasversali e longitudinali che
ricorda una lettera gamma maiuscola,
Γ.
Il vantaggio di questa rete
è che riportando al primario le impedenze dell'avvolgimento secondario
(ricordando che in questa operazione occorre moltiplicare per il quadrato
del rapporto spire) come in gura 3.8, è possibile sommare tra loro le
impedenze longitudinali, che risultano in serie tra di loro, permettendo
una notevole semplicazione.
Particolarmente adatta al funzionamento di corto-circuito, ma spesso
utilizzata anche nel campo nominale di funzionamento, è la rete equivalente di Kapp, caratterizzata dal considerare trascurabile l'impedenza trasversale rispetto alla longitudinale.
in gura 3.9.
Questa rete è rappresentata
Da questa rete si può ricavare il diagramma polare di
3.2.
61
IL TRASFORMATORE MONOFASE
R1+jXd 1
I1
N1/N2
I’1
R2+jXd 2
I2
I10
R0
V1
X0
E1
E2
Iµ
Ia
Figura 3.7: Rete equivalente a
I10
R0
V1
E1
V2
Iµ
Ia
Figura 3.8: Rete a
I1
I2
N1/N2
I’1
X0
Γ.
(R2+jXd 2)(N1/N2)2
R1+jXd 1
I1
V2
Γ con impedenze del secondario riportate al primario.
R1+jXd 1
(R2+jXd 2)(N1/N2)2
I2
N1/N2
V1
E1
V2
Figura 3.9: Rete equivalente di Kapp del trasformatore.
62
CAPITOLO 3.
MACCHINE ELETTRICHE
Im
Xd1t I1
V1cc
N2 I
N1 2
Re
R N2 I
1t N 2
1
Figura 3.10: Diagramma di corto-circuito del trasformatore.
corto-circuito del trasformatore.
Esso si può tracciare come in gura
3.10.
Si voglia determinare la rete equivalente di un trasformatore reale di
cui si conosca il rapporto spire,
2 Si
richiama il fatto che nel caso ideale è supposta nulla.
Appendice A
Richiami di analisi vettoriale
A.1 Concetti introduttivi
Nell'operare con le equazioni dell'elettromagnetismo, è importante conoscere e saper utilizzare alcuni risultati fondamentali dell'analisi vettoriale.
In questa appendice vengono riassunti i risultati fondamentali
relativi agli operatori più comunemente usati per le equazioni del campo
elettromagnetico.
A.2 Operatori dierenziali
A.2.1 Operatori del primo ordine
Tra gli operatori dierenziali del primo ordine meritano particolare attenzione i seguenti
•
gradiente
•
divergenza
•
rotazionale (o rotore)
A.2.1.1
Gradiente
Il gradiente è un operatore dierenziale che applicato ad un campo
scalare ne produce, punto per punto, uno vettoriale.
63
Chiamando con
64
ϕ
APPENDICE A.
RICHIAMI DI ANALISI VETTORIALE
una funzione scalare della posizione, detta potenziale, si denisce
gradiente di
ϕ
il vettore
~
~u = 5ϕ,
(A.1)
che può scriversi nelle sue componenti, rispetto ad una terna di assi
cartesiani ortogonali,
∂ϕ~ ∂ϕ~ ∂ϕ ~
k.
ux~i + uy~j + uz~k =
i+
j+
∂x
∂y
∂z
ϕ, ossia le superci in cui
Dal momento che su ogni supercie di livello di
ϕ
(A.2)
assume un valore costante, il gradiente risulta nullo per denizione,
per una direzione qualsiasi
un~n =
=
∂ϕ
~n
∂n
∂ϕ
∂n
~n
si avrà
=
∂ϕ dn~
i
∂n dx
cos α~i +
+
∂ϕ
∂y
∂ϕ dn~
j
∂y dx
+
cos β~j +
∂ϕ dn ~
k
∂z dx
∂ϕ
∂z
=
cos γ~k
in cui si sono introdotti i coseni direttori della direzione
~n
rispetto ad
una terna di assi cartesiani. Da quanto sopra risulta l'espressione
~ · ~n = ∂ϕ ~n
5ϕ
∂n
per il prodotto scalare, da cui si evince che il gradiente è massimo nella direzione
~n
che risulta ortogonale in ogni punto alla tangente alla
1
supercie di livello passante per quel punto
.
Può risultare utile esprimere il gradiente rispetto ad altri sistemi di
coordinate:
Gradiente in coordinate non cartesiane
utilizzando le
coordinate polari ρ, φ:
In casi bidimensionali
~ = ∂ϕ ~eρ + 1 ∂ϕ ~eφ
5ϕ
∂ρ
ρ ∂φ
Nei casi tridimensionali in coordinate cilindriche
~ = ∂ϕ ~eρ + 1 ∂ϕ ~eφ + ∂ϕ ~ez
5ϕ
∂ρ
ρ ∂φ
∂z
(A.3)
ρ, φ, z :
(A.4)
1 Infatti dovendo il prodotto scalare 5ϕ·~
~ n essere nullo nella direzione della tangente
ad ogni supercie di livello, si rammenti che il prodotto scalare si annulla per vettori
ortogonali mentre e massimo per vettori paralleli.
A.2.
65
OPERATORI DIFFERENZIALI
ed in coordinate sferiche
ρ, ϑ, φ:
~ = ∂ϕ ~eρ + 1 ∂ϕ ~eϑ + 1 ∂ϕ ~eφ .
5ϕ
∂ρ
ρ ∂ϑ
ρ sin ϑ ∂φ
(A.5)
A.2.2 Divergenza
Operatore che si applica ad un vettore ottenendo come risultato uno
scalare:
~ · u~.
ϕ=5
(A.6)
In coordinate cartesiane l'operatore divergenza si scrive
~ · ~u = ∂ux + ∂uy + ∂uz ,
5
∂x
∂y
∂z
(A.7)
mentre in coordinate polari
~ · ~u = 1 ∂(rur ) + 1 ∂uφ .
5
r ∂r
r ∂φ
In coordinate cilindriche
~ · ~u = 1 ∂(rur ) + 1 ∂uφ + ∂uz ,
5
r ∂r
r ∂φ
∂z
ed, inne, in coordinate sferiche
2
~ · ~u = 1 ∂(r ur ) + 1 ∂(sin ϑuϑ + 1 ∂uφ .
5
r2 ∂r
r sin ϑ
∂ϑ
r sin ϑ ∂φ
A.2.3 Rotazionale o rotore
E' un operatore dierenziale del primo ordine che, applicato ad un vettore restituisce un vettore:
~ × ~v .
~u = 5
In coordinate cartesiane
ux =
∂vz
∂y
−
∂vy
∂z
uy =
∂vx
∂z
∂vy
∂x
−
∂vz
∂x
−
∂vx
.
∂y
uz =
(A.8)
66
APPENDICE A.
RICHIAMI DI ANALISI VETTORIALE
In coordinate polari vi è solo la componente ortogonale al piano
1
uz =
r
∂(rvφ ) ∂vr
−
∂r
∂φ
in coordinate cilindriche
ur =
uφ =
uz =
1 ∂vz
r ∂φ
−
∂vφ
∂z
∂vr
z
− ∂v
∂z
∂r
1 ∂(rvφ )
∂vr
− ∂φ
r
∂r
e in coordinate sferiche
1
r sin ϑ
∂
(v
∂ϑ φ
∂vϑ
∂φ
sin ϑ) −
∂
r
uϑ = 1r sin1 ϑ ∂v
−
(rv
)
φ
∂φ
∂r
ϑ)
r
− ∂v
.
uφ = 1r ∂(rv
∂r
∂ϑ
ur =
A.2.4 Operatori dierenziali del secondo ordine
Tra gli operatori del secondo ordine che risultano ammissibili si ricordino
le seguenti notevoli relazioni:
~ × (5ϕ)
~
5
=0
essendo il gradiente un vettore irrotazionale. Inoltre
~ · (5
~ × ~u) = 0
5
essendo il rotore un vettore indivergente.
Molto importante è l'
operatore di Laplace
ottenuto applicando con-
secutivamente ad una funzione scalare prima il gradiente e successivamente la divergenza:
~ · (5ϕ)
~
5
= 52 ϕ.
In coordinate cartesiane vale
52 ϕ =
∂2ϕ ∂2ϕ ∂2ϕ
+ 2 + 2.
∂x2
∂y
∂z
A.2.
67
OPERATORI DIFFERENZIALI
In coordinate polari
r, φ
(problemi bidimensionali):
1 ∂
5 ϕ=
r ∂r
2
∂ϕ
r
∂r
+
1 ∂2ϕ
.
r2 ∂φ2
r, ϑ, z :
∂ϕ
1 ∂2ϕ ∂2ϕ
1 ∂
2
r
+ 2 2 + 2.
5 ϕ=
r ∂r
∂r
r ∂ϑ
∂z
In coordinate cilindriche
In coordinate sferiche
r, ϑ, φ:
∂
1 ∂2
1
5 ϕ=
(rϕ) + 2
2
r ∂r
r sin ϑ ∂ϑ
2
∂ϕ
sin ϑ
∂ϑ
+
1 ∂2ϕ
.
r2 sin ϑ ∂φ2
Inoltre vale:
~ × (5
~ × ~u) = 5(
~ 5
~ · ~u) − 5
~ 2~u
5
nella quale compare il laplaciano vettoriale che risulta denito da quest'ultima espressione. Valgono in particolare le seguenti espressioni del laplaciano vettoriale: in coordinate cartesiane
2
~ ~u)x = 52 ux
(5
2
~ ~u)y = 52 uy
(5
2
~ ~u)z = 52 uz ,
(5
in coordinate cilindriche
2
∂u
ur
− r22 ∂φφ
r2
u
r
52 uφ − r2φ + r22 ∂u
∂φ
~ ~u)r = 52 ur −
(5
2
~ ~u)φ =
(5
2
~ ~u)z = 52 uz ,
(5
mentre in coordinate sferiche
2
2ur
r2
2
uϑ
r2 sin2 ϑ
uφ
r 2 sin2 ϑ
~ ~u)r = 52 ur −
(5
~ ~u)ϑ = 52 uϑ −
(5
2
~ ~u)φ = 52 uφ −
(5
−
2uϑ
r2
cot ϑ −
2 ∂uϑ
r2 ∂ϑ
∂uφ
2
r 2 sin ϑ ∂φ
2 cot ϑ ∂uφ
r 2 sin ϑ ∂φ
+
2 ∂ur
r 2 ∂ϑ
+
2
∂ur
r2 sin2 ϑ ∂φ
−
−
−
2 cot ϑ ∂uϑ
.
r 2 sin ϑ ∂φ
68
APPENDICE A.
RICHIAMI DI ANALISI VETTORIALE
A.3 Teoremi
Per un vettore,
~u, denito in una regione τ , dello spazio ordinario, delimS , vale il seguente teorema della divergenza
itata da una supercie chiusa
(o di Gauss)
I I
Z Z Z
~u · ~ndS =
S
in cui
limite
~n
S,
~ · ~udτ,
∇
(A.9)
τ
rappresenta il versore normale in ogni punto della supercie
orientato nella direzione uscente.
Vale inoltre anche il seguente teorema (di Stokes) in riferimento ad
una qualsiasi supercie aperta
linea chiusa,
γ,
S
che si appoggi tuttavia ad una stessa
come contorno
I
γ
~u · ~tdl =
Z Z
~ × ~u) · ~ndS.
(5
(A.10)
S
~t, in ogni punto alla linea chiusa
normale, ~
n, alla supercie stessa in ogni
La tangente,
che contorna la supercie
e la
suo punto, devono essere
correlate mediante la regola della vite destrogira.