TEORIA ONDULATORIA
DELL' INTERAZIONE
GRAVITAZIONALE
Autore : Matteo Ciampone.
Simboli e notazioni :
•
•
a
: la lettera col simbolo di freccia indica un vettore ;
⃗
∣⃗a∣=a : il simbolo | | o più semplicemente la lettera senza freccia indicano il
modulo del vettore ;
•
a x ⃗b : il simbolo x indica il prodotto vettoriale ;
⃗
•
a •⃗
⃗
b : il simbolo • indica il prodotto scalare ;
⃗
⃗ d +d +d ;
∇
•
: operatore nabla ∇=
dx
•
∇
2
: operatore laplaciano
dy dz
d 2 d 2 d2
∇ 2= 2 + 2 + 2
dx dy dz
.
Introduzione.
Tutto nasce dalla Relatività Generale (RG) di Albert Einstein (AE).
Le deduzioni a cui arrivò AE, attraverso lo studio del campo gravitazionale, mi hanno
portato alla formulazione di questa teoria, che poggia le sue basi sul fatto che
l'interazione gravitazionale si trasmetta attraverso le onde gravitazionali.
La descrizione data da AE prevede che in uno spaziotempo inizialmente piatto e
vuoto, nel momento in cui compare una densità di materia, quest'ultima sia in grado
di perturbare lo spaziotempo stesso.
La perturbazione è la curvatura dello spaziotempo.
Questa curvatura rappresenta geometricamente il campo gravitazionale.
Il moto della densità di materia attraverso lo spaziotempo, dovrebbe generare delle
increspature che si identificano con le onde gravitazionali.
Per analogia si può pensare ad una barca che si muove sulla superficie del mare e così
facendo genera delle increspature sulla superficie dell'acqua, le quali si propagano
come onde.
Ma lo spaziotempo cos'è?
Se è vero che esiste uno spaziotempo, questo deve esistere in ogni dove ed in ogni
quando. E quindi è presente ovunque e in qualunque tempo.
Le deduzioni di Einstein sono lecite e ormai provate sperimentalmente.
Il problema è che tutte le soluzioni conosciute parlano della geometria
spaziotemporale esterna al corpo che causa la deformazione dello spaziotempo.
Ma internamente al corpo cosa succede?
Una riflessione porterebbe a dire che :
se una qualunque cosa esiste allora si deve trovare dentro lo spaziotempo, e quindi
non è un corpo estraneo ma fa parte dello spaziotempo stesso.
Da cui se ne deduce che lo spaziotempo deve esistere anche all'interno del corpo.
Negare questo fatto equivale a negare l'esistenza stessa dello spazio e del tempo
all'interno di un qualunque corpo.
Con questa considerazione lo scenario cambia.
Lo scenario cambia per un solo motivo: visto e considerato che lo spaziotempo esiste
ovunque, allora la perturbazione non è solo esternamente al corpo ma anche
internamente. Lo spaziotempo, quindi, è curvo anche internamente al corpo.
Nel momento in cui la densità di materia si “muove” (per moto intendo non per forza
uno spostamento, ma anche una semplice vibrazione o un moto rotatorio attorno ad
un asse passante per il centro del corpo) la perturbazione si propaga dall'interno
verso l'esterno del corpo.
In questo modo si dovrebbe propagare un'onda gravitazionale, dal centro verso
l'esterno del corpo, che interagisce con tutta la materia che incontra.
La mia supposizione è che sia proprio l'onda a trasferire alla materia che incontra
quello che chiamiamo interazione gravitazionale.
Capitolo 0 : ANNO ZERO.
Teorema di gauss per il flusso di un vettore :
il flusso elementare di un vettore ⃗A , che sia generato da un punto e che decresca
con la regola dell'inverso del quadrato della distanza dal punto stesso, attraverso una
qualunque superficie dS è uguale a :
d Φ( ⃗
A)= ⃗
A•d ⃗
S =⃗
A • n̂ • d ⃗
S = AdScos(θ)
dove n̂ è la normale alla superficie.
Il flusso totale di ⃗A attraverso l'intera superficie chiusa S , è uguale all'integrale
(nel caso continuo) dei flussi elementari d Φ( ⃗A) :
ΦS ( ⃗
A)=∫ d Φ( ⃗
A)=∫ ⃗
Ad ⃗
S
S
.
S
Applicando il teorema di Gauss al vettore ⃗g si ha:
cos(θ) dS
−GM
Φ S (⃗g )=∫ d Φ(⃗g )=∫ ⃗g d ⃗
S =∫ gcos(θ) dS =∫ ( 2 )cos (θ) dS =−∫ GM
r
r2
S
S
S
S
S
da cui :
Φ S (⃗g )=−∫ GM
S
dove d Ω=
cos(θ)dS
=−∫ GMd Ω=−GM ∫ d Ω=−4 π GM
2
r
S
S
cos(θ) dS
r2
(0.1)
è l'angolo solido del cono che ha per base l'elemento dS.
Nel risultato della 0.1 M è considerata come puntiforme, ma nel caso più generale che
la superficie chiusa dS racchiuda un volume finito con distribuzione continua di M
puntiformi, avremo che :
Φ S ( ⃗g )=−4 π GM =−4 π G ∫ ρ dV
V
(0.2)
Teorema della divergenza :
il flusso di un vettore ⃗A attraverso una superficie chiusa S è uguale all'integrale
⃗ ⃗A ) calcolato sul volume V racchiuso da S :
della divergenza di ⃗A ( d i v ⃗A= ∇
⃗ ⃗A dV
Φ s ( ⃗A)=∫ ⃗A d ⃗
S =∫ ∇
S
.
V
Uguagliando il teorema della divergenza a quello di Gauss :
⃗ ⃗
Φ S ( ⃗g )=−∫ 4 π G ρdV =∫ ∇
g dV
V
(0.3)
V
l'uguaglianza degli integrali assicura l'uguaglianza degli integrandi, per cui :
⃗ •⃗
∇
g =−4 π Gρ
(0.4)
L'equazione 0.4 dice che la sorgente di ⃗g è la densità di materia ρ .
La 0.4 è la prima equazione fondamentale per questa teoria, che esprime il fatto che
la densità è la sorgente del campo ⃗g .
La 0.4 porta alla ben nota equazione di Poisson ∇ 2 V =4 π G ρ , dalla relazione
⃗ V che porta a ∇
⃗ ⃗g =− ∇
⃗∇
⃗ V =−∇ 2 V .
g =−∇
⃗
2
Ovviamente G è la costante di gravitazione universale che vale G=6,67 •10−11 N m 2 .
kg
Legge di Ohm nel caso gravitazionale.
La legge di Ohm nell'elettromagnetismo afferma che : Δ V =RI .
Dove : Δ V è la differenza di potenziale elettrostatico ai capi di un circuito, I è la
corrente elettrica e R è la resistenza elettrica che dipende dal materiale conduttore
considerato.
Vediamo se esiste una relazione del genere nel caso gravitazionale.
Prendiamo ad esempio il sistema solare e lo utilizziamo come se fosse il nostro
laboratorio.
Nel nostro caso la differenza di potenziale sarà Δ V =V sole −V pianeta =
GM sole GM pianeta
,
−
r sole
r pianeta
dove i potenziali sono espressi in modulo.
m pianeta
V sole
V pianeta
ΔV
Mercurio
3,3 •1023
1,92 •1011
9,0209016393• 106
1,919909791•10 11
Venere
4,87 •10 24
1,92 •10
11
5,3690743802 •107
1,9194630926 •1011
Terra
5,98 •1024
1,92 •1011
6,23228125 •107
1,9193767719 •1011
Marte
6,42 •1023
1,92 •10
11
1,2594529412 •107
1,9198740547 •1011
Giove
1,9 •1027
1,92 •1011
1,7724475524 •109
1,9022755245 •1011
Saturno
5,69 •1026
1,92 •10
11
6,2939137645 •108
1,9137060862 •1011
Urano
8,68 •1025
1,92 •1011
2,2704156863 •108
1,9177295843 •1011
Nettuno
1,02 •10
Pianeti
26
11
1,92 •10
2,7433064516 •10
8
11
1,9172566935 •10
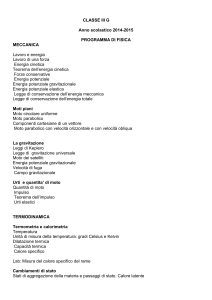
Impostiamo un grafico e studiamo il rapporto
Come si vede dal fit-lineare si ha :
ΔV
m pianeta
−19
Δ V =−9 •10
:
11
m pianeta +1,92 •10
(0.14) .
Le dimensioni della costante 9 •10−19 sono ovviamente :
Dim (9 •10
−19
m2
)=
kg s 2
.
Visto che l'eccentricità delle orbite dei pianeti del sistema solare sono molto basse, è
possibile approssimare le orbite a dei cerchi.
In questo modo possiamo prendere le velocità medie dei pianeti per studiare il
rapporto tra il potenziale del sole, calcolato sulla distanza tra il sole ed il pianeta sotto
esame, e la velocità quadrica media.
Per il moto circolare uniforme vale che :
2
∣⃗a∣= v
r
2
→
v
∣⃗
g∣=
r
2
→
GM v
=
r
r2
→
v2=
GM
r
Infatti :
v̄2
GM / ̄r
Rapporto
Mercurio
2,304 •10 9
2,308 •10 9
1
Venere
1,225 •10
9
1
Terra
9 •10
8,89 •10
8
1
Marte
5,81 •108
5,85 •108
1
Giove
1,69 •108
1,71 •108
1
7
9,35 •10
7
1
7
4,65 •10
7
1
2,96 •10 7
1
PIANETI
9
8
Saturno
9,35 •10
Urano
4,67 •10
3 •107
Nettuno
1,233 •10
Con M =M sole e r =r distanza dal sole .
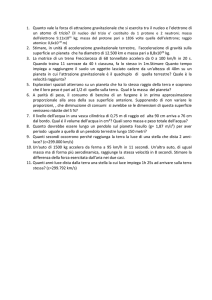
Ora sostituiamo il potenziale del sole con la differenza di potenziale Δ V
studiamo il rapporto Δ V2 :
v
e
In questo caso il fit-lineare è meno evidente, ed anche con un valore fuori scala che è
quello relativo a Giove.
In effetti è solo un'approssimazione che tiene conto della differenza di potenziale
calcolata come Δ V =V sole−V pianeta =
GM sole GM pianeta
−
r sole
r pianeta
, mentre la velocità risente della
distanza dal potenziale che la causa.
Quindi con queste approssimazioni evidenziamo il fit-lineare :
1
Δ V = v 2+1,91 •1011
3
(0.15)
dove la costante 1 è evidentemente adimensionata.
3
Mettendo a sistema la 0.14 con la 0.15 :
Δ V =−9 •10−19 m pianeta +1,92 •1011
1 2
11
Δ V = v +1,91 •10
3
si ottiene :
1 2
v =−9 •10−19 m pianeta
3
2
−18
v =−2,7 •10
→
m
(0.16)
derivando rispetto al tempo :
dv 2
dm
=−2,7 •10−18
dt
dt
(0.17)
2
ma v 2=⃗v •⃗v e quindi si ha che dv = d (⃗v ⃗v )=2⃗v d ⃗v =2⃗v ⃗g , da cui :
dt
−18
2 ⃗v ⃗g =−2,7 •10
→
dm
dt
→
dt
dt
−18
v⃗
g =−1,35• 10
⃗
dr
dm
g ⃗ =−1,35 •10−18
⃗
dt
dt
dm
dt
→
(0.18)
dove l'elemento d ⃗r è lo spazio percorso da m nell'unità di tempo, e la costante
−18
ha le stesse dimensioni della costante 9 •10−19 :
1,35 •10
Dim (9 •10−19 )=Dim(1,35 •10−18 )=
m2
kg s 2
.
Dalla 0.18, integrando rispetto al tempo si ha :
∫ ⃗g d ⃗r =∫−k dm
dove
k =1,35 •10
∫ ⃗g d ⃗r =−k m
→
−18
m2
kg s 2
→
∫ ⃗g d ⃗r =−k ∫ ρ dV
(0.22)
V
.
Come si è visto l'elemento d ⃗r è lo spazio percorso da m sull'orbita e quindi è lecito
considerare l'integrale a primo membro calcolato su di una linea chiusa :
(0.23)
∮ g⃗sole d ⃗r =−k ∫ ρ pianeta dV
V
Teorema di Stokes :
Consideriamo una linea chiusa l ed una superficie aperta S che abbia la linea l come
contorno. Il versore della normale n̂ , uscente da S, sia orientato in modo da vedere
come antiorario il verso positivo di l .
Sia ⃗A un qualunque campo vettoriale, che abbia componenti continue insieme alle
loro derivate parziali prime su tutti i punti di S e di l ; allora il teorema di Stokes
assicura che :
∮ ⃗A dl =∫ ∇⃗ x ⃗A dS
l
(0.24)
S
La 0.24 è più nota come teorema del rotore che non è altro che un caso particolare
del più generale teorema di Stokes.
Applicando il teorema del rotore al primo membro della 0.23 :
∫ ∇⃗ x g⃗sole d ⃗S =−k ∫ ρ pianeta dV
S
Dalla 0,2 risulta
(0.25)
V
Φ S ( ⃗g )=−4 π GM =−4 π G ∫ ρ dV
, da cui :
V
Φ ( g⃗ )
∫ ρ dV =−( 4SπG )
V
∫ ⃗g d ⃗S
→
∫ ρ dV =−( S4 π G
V
)
(0.26)
Quindi la 0.25 diventa :
k
S
⃗ )d ⃗
∫ ∇⃗ x g⃗sole d ⃗S =∫ ( 4 π G g pianeta
S
(0.27)
S
Da cui :
⃗ x g⃗ = k g ⃗
∇
sole
4 πG pianeta
→
⃗ sole
⃗ x g⃗ = k d v tangenziale
∇
sole
4 πG
dt
(0.28)
La 0.28 è la seconda equazione fondamentale per questa teoria.
Capitolo 1 : Equazione dell'onda gravitazionale.
Le equazioni fondamentali sono :
1.
2.
⃗ •⃗
g =−4 π Gρ ;
⃗ x ⃗g = k d ⃗v .
∇
4 π G dt
Nella seconda equazione va ricordato che la velocità è la velocità tangenziale lungo
l'orbita del campo “g”.
⃗ x(∇
⃗ x⃗
⃗ (∇
⃗ • ⃗A) ) alla 2 si ha :
A)=−∇ 2 ⃗A+∇
Applicando l'operatore rotore ( ∇
⃗ x(
⃗ x ⃗g )=∇
⃗ x( k d ⃗v )
∇
4 π G dt
→
⃗ (∇
⃗ g⃗ )= k d ( ∇
⃗ x v⃗ )
−∇ 2 g⃗ + ∇
4 π G dt
(3)
Dalla fluidodinamica è noto che :
⃗ x ⃗v =2 ω
∇
⃗
(4)
dθ
dove ω
è la velocità angolare.
⃗=
dt
Quindi si ha che :
k dω
⃗
⃗ (∇
⃗ ⃗
−∇ 2 ⃗
g +∇
g )=
2 π G dt
(5)
Ora studiamo che tipo di rapporto lega la velocità angolare orbitale di un corpo con il
suo campo gravitazionale.
Per farlo useremo il sistema solare : quindi i pianeti e le lune maggiori.
Il tipo di rapporto che studieremo sarà :
g⃗
ω
⃗ = A +B
r
dove A e B sono costanti da determinare, ω
⃗ è la velocità angolare orbitale del
corpo, ⃗g è il campo gravitazionale del corpo come se ci si trova sulla sua
superficie ed r è lo scalare del raggio del corpo supposto sferico.
Come è evidente dal fit si ha :
ω
⃗ =−w
g
⃗
+B
r
(6)
Derivando rispetto al tempo la 6 si ha :
d
d
⃗g
ω
⃗ = (−w +B)
dt
dt
r
dove
w=25,2 s
dω
d g
=−w ( ⃗ )
dt
dt r
→
(7)
.
Inserendo la 7 nella 5 :
−kw d ⃗g
2
⃗ (∇
⃗ ⃗
−∇ ⃗
g +∇
g )=
( )
2 π G dt r
(8)
Calcoliamo la derivata che compare a secondo membro della 8 :
d ⃗
g
1 dg
dr
( )= 2 (r ⃗ − g⃗ )
dt r
dt
dt
r
(9)
La derivata
dr
dt
a destra della 9 è nulla, in quanto il raggio del corpo che orbita
resta invariato, e quindi dr =0 .
Con queste considerazioni la 9 diventa :
d ⃗
g 1 dg
( )= ( ⃗ )
dt r
r dt
(10)
che inserita nella 8 :
⃗ (∇
⃗ g⃗ )= −kw 1 ( d ⃗g )
−∇ 2 g⃗ + ∇
2 π G r dt
(11)
Dalla 11 si ricava :
kw d ⃗g
⃗ (∇
⃗⃗
r ∇2 ⃗
g −r ∇
g )=
2 π G dt
(12)
Dall'identità :
⃗ f )( ∇
⃗ g )+ f (∇ 2 g )
∇ 2 ( fg )=(∇ 2 f ) g+2( ∇
(13)
segue :
⃗ f )( ∇
⃗ g)
f ( ∇ 2 g )=∇ 2 ( fg )−( ∇ 2 f ) g−2( ∇
(14)
Applicando la 14 al primo termine della 12 :
kw d ⃗g
⃗ r )( ∇
⃗ ⃗g )−r ∇
⃗ (∇
⃗ ⃗
∇ 2 ( r ⃗g )−(∇ 2 r ) ⃗
g −2( ∇
g )=
2 π G dt
(15)
Come si è detto prima il raggio “r” è fisso e non varia ne rispetto al tempo e ne
⃗ r =0 .
rispetto allo spazio, e quindi : ∇
Da cui :
kw d ⃗g
⃗ (∇
⃗⃗
∇ 2 ( r ⃗g )−r ∇
g )=
2 π G dt
(16)
Nel caso del vuoto le equazioni 1 e 2 diventano :
⃗ •⃗
g =0
(17)
⃗ x ⃗g = k d ⃗v
∇
4 π G dt
(18)
Dalla 17 segue che la 16 risulta :
∇ 2 ( r ⃗g )−
kw ∂ ⃗
g
=0
2πG ∂ t
(19)
dove si è fatto uso della definizione di derivata totale e della 17, da cui si ricava :
d ⃗g ∂ ⃗
g
⃗⃗
=
+⃗
u∇
g
dt
∂t
d ⃗g ∂ ⃗
g
=
dt
∂t
→
(20)
Il primo termine della 19 può essere scritto come :
⃗ ∇
⃗ V =∇
⃗ (−⃗g )=−∇
⃗ ⃗
∇ 2 ( r ⃗g )=∇ 2 (V )= ∇
g
(21)
con la condizione che si consideri il modulo del campo ⃗g come se ci si trovi sulla
superficie della sorgente che genera il campo.
Di conseguenza si ha :
⃗ ⃗g + kw ∂ ⃗g =0
∇
2 π G ∂t
(22)
La 22 è l'equazione dell'onda gravitazionale.
L'unica condizione è che sia :
1
kw
=
v 2πG
−11
→
v=
2 πG 6,28∗6,67∗10
=
=1,23∗10 7<c
−18
kw
1,35∗10 ∗25,2
(23)
e ovviamente :
Dim (
2πG
N∗m 2∗kg−2
N∗kg −1
m
−2
−1
)= 2 −2
=
=kg∗m∗s ∗kg ∗s=
−1
−1
kw
s
m ∗s ∗kg ∗s
s
.
Le soluzioni della 22 sono del tipo :
(24)
u ( x ,t)= f ( x−vt)
ma anche :
u ( x ,t)=A sin(kx−ω t+ϕ)
(25)
dove :
• A è l'ampiezza massima dell'onda, misurata in metri ;
2π
k=
•
è il numero d'onda e λ è la lunghezza d'onda ;
λ
•
•
x è la direzione di propagazione ;
2π
1
ω=
=2 π f è la pulsazione e f =
•
•
t è il tempo trascorso dal momento iniziale della perturbazione ;
ϕ è la fase iniziale .
T
è la frequenza ;
T
Se per semplicità scegliamo come fase iniziale ϕ= −π avremo che
sin(ε− π )=cos (ε) , e quindi :
2
u ( x ,t)=Acos (kx−ω t)
2
(26)
Nel nostro caso avremo soluzioni del tipo :
g(⃗
⃗
d , t)=⃗g cos( ⃗
k⃗
d −ω t)
(27)
dove il vettore d⃗ è il punto che consideriamo alla distanza “d” dalla sorgente.
Visto e considerato che l'onda è sferica allora si avranno soluzioni del tipo :
g (⃗
d , t)=
⃗
1
k⃗
d −ωt )
⃗g cos( ⃗
d
(28)
dove “d” è la distanza dalla sorgente.
Capitolo 2. Densità di energia del campo
g
⃗
.
Cominciamo col considerare un sistema di masse puntiformi disposte in una
configurazione fissa e nota, e calcoliamo l'energia di interazione gravitazionale
posseduta dal sistema.
Inizialmente le masse siano tutte all'infinito e calcoliamo il lavoro necessario per
portarle nella configurazione scelta.
Il lavoro sarà effettuato da una forza esterna F⃗ e .
Il posizionamento della prima massa può essere effettuato considerando il lavoro
nullo, visto che inizialmente nello spazio considerato non è presente nessun campo
gravitazionale ( ipotesi di spaziotempo piatto ) .
Il posizionamento della seconda massa a partire dall'infinito fino ad arrivare a
distanza r 12 dalla prima massa, viene effettuato muovendo la seconda massa
all'interno del campo gravitazionale della prima.
Il lavoro che serve per posizionare la seconda massa viene effettuato dalla forza
esterna frenando contro la mutua attrazione tra le masse, e quindi la forza esterna sarà
uguale a F⃗ e=−m2 g 1 .
Il lavoro effettuato dalla forza esterna sarà dunque :
r12
r12
dr
−1 −1 G m1 m2
L 2=−∫ m 2 g⃗1 d ⃗r =−G m1 m2∫ ( 2⃗ )=−G m1 m 2(
)=
r 12 ∞
r 12
∞
∞
r
(100)
Se ora portiamo una terza massa dall'infinito nella sua posizione, il lavoro che
bisogna compiere contro i campi gravitazionali delle prime due masse sarà :
r13
r 23
L3=−∫ m3 g⃗1 d ⃗r −∫ m3 g⃗2 d ⃗r =
∞
∞
G m1 m3 G m2 m3
+
r 13
r 23
(101)
Quindi l'energia U posseduta da un sistema di tre masse sarà :
G m1 m2 G m1 m3 G m2 m3 1 3 G mi m j
U =L 2+L3=
+
+
= ∑ (
)
r 12
r 13
r 23
2 (i ≠ j)1
r ij
(102)
dove il fattore 1 è stato introdotto perchè la sommatoria comprende ogni termine
2
due volte dato che
Gm 1 m 2 Gm2 m 1
=
r 12
r 21
.
Nel caso più generale di un sistema di N masse puntiformi, l'energia gravitazionale
posseduta dal sistema sarà :
N
G mi m j
1
U= ∑ (
)
2 (i≠ j )1
r ij
(103)
La 103 può essere scritta come :
N
U=
N
N
G mi m j 1
Gm j
1
(
)= ∑ mi ∑ (
)
∑
2 (i≠ j )1
r ij
2 i=1 ( j ≠i)1 r ij
(104)
N
Gm j
) diciamo che V i
r ij
( j≠i )1
rappresenta il potenziale generato nella posizione occupata da mi da tutte le altre
Indicando la seconda sommatoria con V i = ∑ (
masse.
N
Gm j
) è lecita dato che i≠ j
r ij
( j≠i )1
questo modo non si hanno termini infiniti ( r ≠0 ).
L'uguaglianza V i = ∑ (
e quindi r ij ≠0 , ed in
Pertanto riscriviamo la 104 come :
N
U=
1
∑mV
2 i =1 i i
(105)
Nel caso più generale di masse macroscopiche e non puntiformi conviene passare al
caso continuo, e quindi la 204 diventa :
U=
1
ρV d τ
2∫
τ
(106)
dove ρ( x , y , z ) è la densità nel punto (x,y,z), V è la somma dei potenziali di tutte le
altre masse in gioco nel punto (x,y,z), e d τ è l'elemento di volume intorno al punto
(x,y,z).
⃗
⃗ ⃗g =−4 π G ρ da cui ρ=− ∇ ⃗g
Dall'equazione fondamentale 1 risulta ∇
4 πG
inserita nella 106 :
U=
⃗ ⃗
1 −∇
g
(
)V d τ
∫
2 τ 4 πG
→
U=
−1
⃗ g⃗ )V d τ
(∇
∫
8π G τ
(107)
, che
⃗ dice che :
Una proprietà generale dell'operatore ∇
⃗ (V ⃗
⃗ V )⃗
⃗ ⃗
∇
g )=( ∇
g +V ( ∇
g)
(108)
2
⃗ V =− ⃗
g e ⃗
Ma ∇
g ⃗g = g , per cui la 108 diventa :
⃗ (V ⃗
⃗ ⃗
∇
g )=−g 2 +V ( ∇
g)
(109)
Da cui si ricava :
⃗ ⃗g )V = ∇
⃗ (V ⃗
(∇
g )+g 2
(110)
Inserendo la 110 nella 107 :
U=
−1
⃗ (V ⃗g )+g 2 )d τ
(∇
8π G ∫
τ
U=
→
Per il teorema della divergenza si ha che
−1
1
⃗ (V ⃗
∇
g ) d τ−
g2d τ
∫
8π G ∫
8
π
G
τ
τ
∫τ ∇⃗ (V ⃗g )d τ=∫ V ⃗g d ⃗S
(111)
, quindi la 111
S
diventa :
U=
−1
1
V ⃗g d ⃗
S−
g2d τ
∫
8π G S
8 πG ∫
τ
(112)
dove τ è un qualunque volume che comprende tutta la distribuzione di massa al
suo interno, e S è la superficie che racchiude τ .
Fissata la distribuzione di massa, la sua energia gravitazionale totale U è la somma
dei due termini che compaiono a destra della 112 indipendentemente dal volume τ
considerato per eseguire il calcolo.
Tuttavia il secondo termine a destra della 112 ∫ g 2 d τ all'aumentare del volume
τ
τ va aumentando, almeno fino a quando non contenga tutto il volume in cui
g⃗ ≠0 .
In altre parole : più volume consideriamo e più campo gravitazionale consideriamo,
almeno fino a quando g⃗ ≠0 .
Di pari passo va diminuendo il primo termine e cioè l'integrale di superficie.
Se il volume che consideriamo diventa così grande da contenere tutto lo spazio in cui
S →0 ;
g⃗ ≠0 , allora il primo termine tenderà a zero ∫ V g⃗ d ⃗
S
e di conseguenza la 112 si ridurrà a :
2
−g
U= ∫ (
) d τ=∫ u g d τ
τ
tutto lo spazio 8 πG
(113)
dove :
−g 2
ug=
8 πG
(114)
La 114 rappresenta la densità di energia del campo ⃗g presente in tutto il volume
in cui ⃗g ≠0 .
Ovviamente le dimensioni della 114 sono quelle di una densità di energia, infatti :
2
Dim (u g )=
2
2
2
2
kg m
kg
kg
kg kg m
J
=
=
= 2= 3 2 = 3
2 4
4
−2 4
Nm s
N s kg m s s m s
m s
m
Capitolo 3. Vettore di Poynting.
Consideriamo una superficie chiusa S di forma costante al cui interno siano contenuti
⃗ .
i campi ⃗g ed M
Allora l'energia totale U contenuta in S sarà data dalla 113 :
U =∫ (
τ
−g 2
)d τ
8πG
dove d τ è l'elemento di volume contenuto in S.
Derivando rispetto al tempo la 113 si ottiene :
2
dU
−1 dg
=∫ (
)d τ
dt τ 8 πG dt
(200)
Ma :
2
dg
d
d⃗
g
d⃗
g
d⃗
g
= ( ⃗g ⃗
g )=
⃗g +⃗g
=2 ⃗g
dt dt
dt
dt
dt
(201)
Inserendo la 201 nella 200 si ha :
dU
−1
dg
=∫ (
g⃗ ⃗ ) d τ
dt τ 4 π G dt
Dalla 7 :
dω
d ⃗
g
=−w ( )
dt
dt r
d ⃗g
1
dω
⃗
=−( )(r
)
dt
w
dt
(202)
, e dalla 10 :
(203)
Inserendo la 203 nella 202 si ha :
dU
−1
−1 d ω
⃗
=∫ (
g )(
r
)d τ
⃗
dt τ 4 π G
w dt
(204)
d ⃗
g 1 d ⃗g
( )= (
)
dt r
r dt
si ha :
Dalla 204 deriva :
dU
1
dω
⃗
=∫ (
)) d τ
⃗g (r
dt τ 4 π Gw
dt
dU
1
=∫ (
⃗g (r ⃗a )) d τ
dt τ 4 π Gw
→
dU
1
⃗ V )(r ⃗
=∫ (
(−∇
a )) d τ
dt τ 4 π Gw
→
→
(205)
dove V = potenziale gravitazionale , ⃗a =accelerazione angolare orbitale e
r =raggio del corpo .
Quindi :
−(
dU
1
⃗ V (r a⃗ )) d τ
)=∫ (
∇
dt
τ 4 π Gw
→
−(
dU
1
⃗ V)⃗
)=∫ (
(∇
A )d τ
dt
τ 4 π Gw
(206)
dove ⃗A=r ⃗a .
Dall'identità vettoriale :
⃗ (V ⃗A)=( ∇
⃗ V ) ⃗A+V ( ∇
⃗ ⃗A)
∇
(207)
si ricava :
⃗ V ) ⃗A= ∇
⃗ (V ⃗A)−V ( ∇
⃗ ⃗
(∇
A)
(208)
Dalla 208 la 206 diventa :
−(
dU
1
⃗ (V ⃗
⃗ ⃗A))) d τ
)=∫ (
(∇
A )−V ( ∇
dt
τ 4 π Gw
(209)
Ma il vettore ⃗A=r ⃗a è il prodotto scalare tra due termini costanti.
Infatti r=raggio del corpo ha un valore costante, mentre
a =accelerazione angolare orbitale è una costante del moto.
⃗
⃗ ⃗
A=0 , per cui la 209
Quindi anche il vettore ⃗A=r ⃗a =costante e di conseguenza ∇
diventa :
−(
⃗ (V ⃗
∇
A)
dU
)=∫ (
)d τ
dt
4 π Gw
τ
(210)
Applicando il teorema della divergenza alla 210 ;
−(
dU
V⃗
A
)=∫ (
)d ⃗
S
dt
S 4 π Gw
(211)
Come si vede la 211 dice che, al passare del tempo, la variazione di energia
contenuta nella superficie chiusa S che racchiude il volume τ è negativa,
quindi vuol dire che c'è una diminuzione di energia.
Quest'energia per unità di superficie è rappresentata dall'integrando della 211,
che possiamo considerare a tutti gli effetti come un vettore di Poynting ⃗I :
⃗
⃗I = V A
4 π Gw
(212)
Infatti le dimensioni del vettore ⃗I sono :
Dim ( ⃗I )=
2
2
2
2
2
m m kg
kg m
kg m
kg kg m W
=
=
= 3 = 3 2= 2
2
2
5
−2 5
N
m
s
s s
Ns
kg m s s
s
s m m
e cioè un'energia per unità di tempo e per unità di superficie, o più semplicemente
watt per metro quadro.
Il vettore ⃗I può essere scritto come :
⃗I =
⃗A
⃗
d g⃗
4 π Gw
(213)
dove il vettore d⃗ è il punto alla distanza “d” dalla sorgente in cui andiamo a
considerare il potenziale “V” .
Ma dalla 28 si è visto che il campo g⃗ è una grandezza cosinusoidale :
1
g (⃗
d , t)= ⃗g cos( ⃗
k⃗
d −ωt )
⃗
d
(28)
e tale sarà il vettore ⃗I della 213 :
⃗I =
⃗A
⃗
1
A
d⃗ ( ⃗
g cos (⃗k d⃗ −ω t))=
u⃗ ⃗g cos( ⃗
k⃗
d −ω t )
4 π Gw d
4πGw d
⃗
d
dove u⃗d = d
(214)
è il versore che indica la stessa direzione e verso del vettore d⃗ .
Il modulo del vettore ⃗I è :
I=
A
g cos ( ⃗
k⃗
d −ω t)
4πGw
(215)
La 215 è l'intensità istantanea dell'onda e rappresenta l'energia che all'istante t
fluisce nell'unità di tempo attraverso l'elemento di superficie.
Considerando che il valor medio su un periodo del coseno al quadrato vale 1 ,
2
l'intensità media ̄I dell'onda vale :
̄I =
rag
4 π G w √2
(216)
La 216 rappresenta il valor medio dell'intensità dell'onda dove :
r = raggio del corpo che orbita ; a = accelerazione angolare orbitale del corpo
orbitante ; g = campo gravitazionale orbitante.
Nel caso in cui consideriamo il campo ⃗g come se ci si trova sulla sua superficie,
allora la 216 diventa :
Gm
r2
am
̄I =
=
4 π G w √2 4 π w r √2
ra
(217)
Capitolo 4. Prove dirette.
Consideriamo un elemento di volume al cui interno ci siano “n” particelle di massa
“m” per unità di volume, dotate di velocità ⃗v .
Allora il vettore :
(300)
⃗
J =n m ⃗v
sarà quel vettore che identifica la densità di quantità di moto per unità di volume.
Se prendiamo ad esempio le lune dei pianeti del sistema solare, si vede che la densità
di quantità di moto di una luna, calcolata sul volume della sfera che ha per raggio la
distanza pianeta-luna, è proporzionale al campo gravitazionale del suo pianeta
calcolato alla distanza pianeta-luna.
Infatti :
Come si vede dal fit la relazione è :
5
⃗
J = p( ⃗
g )3
(301)
3
dove p=0,73 kg 11s
m
7
.
Moltiplicando scalarmente ambo i membri della 301 per ⃗g si ottiene :
5
g⃗
J = p (⃗
g )3 ⃗
g
⃗
→
W v = p( g )
8
3
(302)
dove W v =densità di potenza per unità di volume .
La 114 rappresenta la densità di energia del campo ⃗g presente in tutto il volume in
cui ⃗g ≠0 e vale :
ug=
−g 2
8 πG
(114)
Visto che la 302 dipende strettamente dalla 114, studiamo il rapporto che esiste tra
loro :
8
2
Wv
−8 π G
3
= p(g ) 3 (
)=−8
π
G
p(
g
)
2
ug
g
(303)
2
Come si vede il rapporto dipende dal valore di (g )3 .
La 216, che esprime l'intensità media dell'onda gravitazionale, dipende strettamente
dal volere di “g” e vale :
̄I =
rag
4 π G w √2
(216)
Se, come ipotizzato, la radiazione gravitazionale in realtà è un'onda gravitazionale,
allora deve esistere una relazione tra la 216 e la 302.
Ma considerando la 303 studieremo il rapporto che esiste tra la 302 e la 216 elevata
alla 2/3 .
Come fatto prima prenderemo in esame la densità di potenza delle lune dei pianeti del
sistema solare e il valor medio, elevato alla 2/3, dell'intensità dell'onda gravitazionale
dei relativi pianeti.
Per la densità di potenza bisogna tener presente che i corpi celesti girano su se stessi,
quindi la densità di volume va calcolata come :
W v=
1
( mvg+Ω ω)
Volume
(304)
dove : Volume=volume della sfera di raggiod =distanza tra i corpi orbitanti ;
Ωω= potenza rotazionale giornaliera ; Ω=momento meccanico del corpo e
ω=velocità angolare giornaliera .
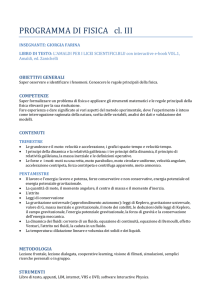
La relazione che si trova è la seguente :
Come è evidente la relazione è :
̄2 3
W v =2,53( I 3 ) 2 =2,53 ̄I =σ ̄I
(305)
dove la costante vale σ=2,53 m−1 .
La 305 mette in evidenza la proporzionalità che esiste tra l'intensità dell'onda e
la densità di potenza che esiste sul fronte d'onda che andiamo a considerare.
Questa è la prova diretta che l'interazione gravitazionale viene trasmessa
attraverso le onde gravitazionali.
Capitolo 5. Conclusioni .
Tutto lo studio fatto fin qui ha messo in evidenza che l'ipotesi iniziale è confermata.
Cioè, come si è visto, il moto del campo gravitazionale produce le onde gravitazionali
che trasmettono a tutto quello che incontrano l'interazione gravitazionale.
La cosa da non sottovalutare è la parola “moto”.
Infatti se il campo fosse statico non dovrebbe emettere radiazione, il che porterebbe a
pensare che non sia possibile il trasferimento dell'interazione gravitazionale.
Ma siamo sicuri che si possa definire in modo assoluto che un campo gravitazionale
sia statico? Io credo di no!
Per dire che un campo sia statico o meno bisogna per forza specificare rispetto a cosa.
Io credo che sia sempre possibile scegliere un sistema di riferimento rispetto al quale
il campo è in moto.
D'altra parte, visto che l'universo è in espansione, se per assurdo il campo risulta
fermo rispetto a tutti gli altri corpi dell'universo ; possiamo sempre metterci nel
riferimento dell'espansione e considerare che il campo sia in moto.
La conclusione di questo ragionamento porta a dire che non è possibile definire in
modo assoluto, cioè rispetto a tutti i sistemi di riferimento, se un campo sia statico.
Per come la vedo io nulla si può definire veramente fermo e immobile, anzi di
immobile non c'è proprio nulla!!
Ne segue che è impossibile che non ci siano le onde gravitazionali, da cui la tesi.
L'equazione 216 che qui riporto : ̄I =
rag
, mostra chiaramente che per creare
4 π G w √2
gravità è sufficiente che un campo gravitazionale si muova.
Quest'ultima affermazione discende dal fatto che nella 216 compare l'accelerazione
angolare orbitale “a”, che testimonia quanto detto.
Visto e considerato che la radiazione gravitazionale si manifesta sottoforma di onde,
allora forse è anche possibile creare un'interferenza nel segnale.
Se non è possibile rilevare l'onda gravitazionale, forse è possibile interagire con essa
attraverso il fenomeno dell'interferenza.
Se davvero fosse così allora si avrebbe una prova indiretta dell'esistenza del
fenomeno, oltre al fatto che si potrebbe addirittura levitare.
Ma, per il momento, queste ultime sono solo supposizioni che magari un giorno
diventeranno realtà avendo a disposizione la giusta tecnologia.
Per il momento bisogna accontentarsi di essere a conoscenza dell'esistenza del
fenomeno.