APPENDICI
APPENDICE A
TEOREMI DEI CIRCUITI
1. Teorema del massimo trasferimento di potenza
Il teorema del massimo trasferimento di potenza stabilisce le condizioni che massimizzano
la potenza ceduta da una sorgente sinusoidale a un carico, nell'ipotesi che i circuiti considerati
operino in condizioni di linearità e in regime sinusoidale permanente. In questo caso la sorgente è
completamente caratterizzata quando se ne conosce la tensione d'uscita a circuito aperto e
l'impedenza d'uscita ZS = RS + jXS; il carico è completamente caratterizzato quando se ne conosce
l'impedenza ZL = RL + jXL.
Indicando con v(t) = V cos(t) la tensione della sorgente a circuito aperto, la corrente che
scorre nel carico sarà i(t) = I cos(t+) con I = V/|ZS+ZL|. Pertanto la potenza PL erogata al carico è
(1)
PL
I 2 RL V 2
RL
2
2
2 RS RL X S X L 2
Il massimo di questa grandezza si ottiene eguagliando a zero le sue derivate rispetto a R L e
XL. Si ottengono così le due condizioni
(2)
RLo = RS
;
XLo = -XS
per cui si ha il massimo trasferimento di potenza dalla sorgente al carico (si noti che la seconda
corrisponde a imporre la risonanza del circuito alla frequenza considerata). Tali condizioni si
possono esprimere nella forma più compatta
(3)
ZLo = ZS*
che stabilisce che l'impedenza del carico deve essere uguale alla coniugata dell'impedenza della
sorgente. Quando ciò si verifica, e in tal caso si dice che il carico è adattato alla sorgente, la potenza
assorbita dal carico assume il valore massimo
G.V. Pallottino – Maggio 2011
Università di Roma Sapienza - Dipartimento di Fisica
Appunti di Elettronica - Appendici
pag. 1
(4)
PL
V2
8RL
Quando, come avviene spesso in pratica, occorre realizzare l'adattamento d'impedenza
(impedance matching) tra una sorgente e un carico che abbiano entrambi impedenze fissate a priori,
cioè non modificabili, si interpone fra la sorgente e il carico una rete detta di adattamento.
Se le impedenze della sorgente e del carico sono ambedue reali, la rete di adattamento sarà
costituita da un trasformatore1. Ma in tal caso occorre valutare attentamente gli effetti dei parametri
parassiti di questo componente: a bassa frequenza l'effetto dell'induttanza parallelo, ad alta
frequenza quello delle induttanze disperse e delle capacità parassite.
Se una delle due impedenze (o entrambi) non è reale, la rete di adattamento dovrà contenere
elementi atti a realizzare, oltre alla prima, anche la seconda condizione di adattamento. Se è
sufficiente ottenere l'adattamento soltanto a una frequenza ben determinata, la soluzione è
immediata: basta disporre in serie2 al carico (o alla sorgente) un elemento reattivo (condensatore o
induttore) di reattanza tale da soddisfare la condizione anzidetta. In tal caso, supponendo per
semplicità che si abbia RL = RS, l'elemento di adattamento dovrà avere reattanza XA tale da
verificare, alla frequenza considerata, la condizione:
(5)
XS + XL + XA = 0
Assai più complesso è il problema dell'adattamento quando esso debba essere verificato su
una banda di frequenze, dal momento che le reattanze (della sorgente, del carico e della rete di
adattamento) sono in generale funzioni della frequenza. Tale problema (broadband matching) può
essere risolto solo approssimativamente.
1
Questa non è l'unica soluzione: in determinate condizioni, come quando è sufficiente realizzare l'adattamento soltanto
nell'intorno di una determinata frequenza, si possono utilizzare schemi basati sull'impiego di circuiti risonanti
(sfruttando le proprietà di due o più risonatori accoppiati) oppure, ad alta frequenza, si può usare un tratto di linea di
trasmissione di lunghezza opportuna.
2
L'adattamento si può realizzare anche disponendo l'elemento di adattamento in parallelo alla sorgente e al carico, in
tal caso la sua suscettanza dovrà esser tale da annullare la suscettanza totale.
G.V. Pallottino – Maggio 2011
Università di Roma Sapienza - Dipartimento di Fisica
Appunti di Elettronica - Appendici
pag. 2
Esempio. Vogliamo realizzare l'adattamento d'impedenza
alla frequenza di 1000 Hz fra una
sorgente resistiva con RS = 1000 e un carico costituito da un induttore di induttanza L = 10 mH in
serie a un resistore di 10 . La prima condizione è verificata utilizzando un trasformatore con
rapporto spire n = (1000/10)½ = 10. La seconda richiede l'inserimento di un elemento reattivo, che
nel nostro caso sarà evidentemente un condensatore. Il valore CA della capacità di tale condensatore
sarà diverso a seconda che lo si disponga in serie alla sorgente oppure al carico. In quest'ultimo caso
esso dovrà avere reattanza XA = -XL = -ωL; essendo CA = ωXA, si avrà CA = 1/ω2L =
1/(2π1000)2×0.01 = 2,53 µF. Collegando il condensatore in serie alla sorgente, la sua capacità sarà
n² = 100 volte minore.
Esercizio. Determinare un valore accettabile per l’induttanza del primario del
trasformatore.
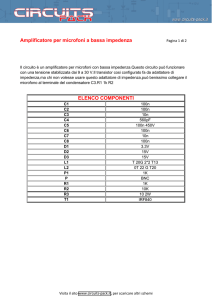
2. Teorema di Helmholtz-Thévenin
Il teorema di Helmholtz-Thévenin3 fornisce una descrizione
sintetica esatta del comportamento di una rete lineare attiva vista a una
sua porta, rappresentandola con un circuito equivalente costituito da un
bipolo
attivo.
Tale
descrizione
riguarda
esclusivamente
il
comportamento esterno della rete, per esempio quando alla porta considerata si collega un carico di
impedenza arbitraria. Il teorema HT, più precisamente, stabilisce che qualsiasi rete lineare attiva a
una porta è equivalente al circuito costituito da un generatore di tensione ideale Vo(s) disposto in
serie a una impedenza Zo(s), dove
Vo(s) rappresenta la trasformata della tensione che si osserva alla porta della rete in assenza
di carico esterno (tensione a vuoto);
Zo(s) rappresenta l'impedenza della porta (impedenza d'uscita).
Quest'ultima grandezza richiede una precisazione: essa s'intende definita quando tutti i
generatori indipendenti contenuti nella rete sono disattivati (cortocircuitando i generatori di tensione
3
Questo teorema è comunemente attribuito all'ingegnere telegrafico francese Leon Charles Thévenin che lo presentò
nel 1883, in un lavoro pubblicato nei rendiconti dell'Accademia Francese delle Scienze. In realtà il teorema venne
introdotto per la prima volta dal fisico tedesco Hermann von Helmholtz nel 1853, in un lavoro concernente l'elettricità
animale (J.E. Brittain Thévenin's theorem IEEE Spectrum, marzo 1990, pag. 42).
G.V. Pallottino – Maggio 2011
Università di Roma Sapienza - Dipartimento di Fisica
Appunti di Elettronica - Appendici
pag. 3
ed eliminando i generatori di corrente), mentre restano invece attivi tutti i generatori controllati4.
Quanto detto sopra fornisce anche utili indicazioni per l'esecuzione di misure atte a
determinare sperimentalmente i parametri Vo(s) e Zo(s) di una rete attiva. Ma in queste misure è
spesso necessaria una particolare attenzione per evitare l'insorgere di fenomeni di nonlinearità (per
esempio, per determinare l'impedenza d'uscita di una rete a bassa impedenza 5 è consigliabile
applicare un generatore di corrente e misurare la tensione che si stabilisce alla porta della rete,
piuttosto che applicare un generatore di tensione e misurare la corrente che scorre nella rete).
Usando la descrizione di Helmholtz-Thévenin, si conclude che quando la rete è collegata a
un carico di impedenza Z(s) la corrente che scorre dalla rete al carico è
(6)
I(s) = Vo(s)/(Zo(s)+Z(s))
Questa, in condizioni di cortocircuito (ammesso che in tal caso la linearità della rete sia
ancora verificata), assume il valore
Io(s) = Vo(s)/Zo(s)
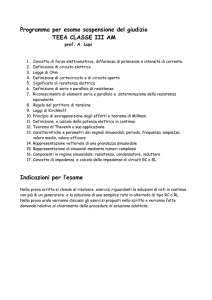
3. Teorema di Norton
Questo teorema costituisce il duale del teorema di HelmholtzThévenin. La rete lineare attiva viene infatti rappresentata con un
circuito equivalente costituito da un generatore ideale di corrente Io(s)
disposto in parallelo a una ammettenza Yo(s), dove
Io(s) rappresenta la trasformata della corrente che si osserva
cortocircuitando la porta della rete (corrente di cortocircuito);
Yo(s) rappresenta l'ammettenza della porta (ammettenza d'uscita);
e si ha evidentemente:
(7)
Yo(s) = 1/Zo(s)
;
Io(s) = Yo(s) Vo(s)
Anche per il teorema di Norton valgono le precisazioni e le considerazioni fatte prima a
proposito del teorema di Helmholtz-Thévenin.
4
Si tratta di un punto importante, dato che l'impedenza d'uscita di un circuito reazionato (amplificatori a
controreazione, regolatori di tensione, ecc.) dipende in modo essenziale dall'azione dei generatori controllati presenti nel
circuito stesso.
5
Si può usare questo metodo, ad esempio, per misurare l’impedenza d’uscita di un alimentatore stabilizzato in
funzione della frequenza.
G.V. Pallottino – Maggio 2011
Università di Roma Sapienza - Dipartimento di Fisica
Appunti di Elettronica - Appendici
pag. 4
4. Teorema di Millman
Il
teorema di Millman stabilisce che, disponendo in parallelo n bipoli lineari attivi, ciascuno con
tensione a vuoto Vi(s) e impedenza d'uscita Zi(s), la tensione risultante è:
V s
(8)
V s Y s V s Z s
Y s
1 Z s
i
i
i
i
i
i
i
i
i
i
e l'impedenza d'uscita è data dal parallelo delle impedenze Zi. A questo risultato si arriva
utilizzando il teorema di Norton e il principio di sovrapposizione degli effetti.
5. Teorema di Miller
Il teorema di Miller6 riguarda quelle reti lineari nelle quali vi è un nodo la cui tensione
determina univocamente la tensione di un altro nodo
(9)
V2(s) = K(s) V1(s)
per esempio grazie all'azione di un generatore controllato. Esso presenta particolare interesse nel
caso delle reti attive.
Il teorema di Miller stabilisce che un'impedenza Z(s) collegata fra i due nodi può essere
eliminata sostituendola con due impedenze: Z'(s) collegata fra il primo nodo e il riferimento di
massa, Z"(s) collegata fra il secondo e massa, dove
(10)
Zs
Z s
1 K s
;
Z s
K s Z s
K s 1
6
Nel 1919 il fisico americano John Milton Miller osservò che la capacità d'ingresso di un triodo subiva un forte
aumento quando questo funzionava come amplificatore. Studiando il fenomeno (chiamato oggi effetto Miller, in
qualsiasi tipo di dispositivo amplificatore si verifichi), egli trovò che era dovuto al contributo della capacità
elettrostatica fra l'elettrodo d'ingresso (griglia) e quello d'uscita (anodo) del triodo, quando si stabiliva una
amplificazione fra il primo e il secondo elettrodo.
G.V. Pallottino – Maggio 2011
Università di Roma Sapienza - Dipartimento di Fisica
Appunti di Elettronica - Appendici
pag. 5
La rete così ottenuta è
equivalente
alla
prima
per
quanto riguarda i valori delle
tensioni ai nodi e il suo
comportamento esterno.
Il teorema si dimostra come segue. Se V1(s) e V2(s) sono le tensioni dei due nodi, la corrente
che scorre attraverso l'impedenza Z(s) nel verso diretto dal secondo nodo al primo è
IZ s
(11)
V2 s V1 s
Z s
Nel nodo 1, che si trova alla tensione V1(s), entra dunque la corrente Iz(s), cioè ne esce la
corrente
(12)
I1 s I Z s
V1 s V2 s V1 s 1 K s
Z s
Z s
Dal nodo 2, che si trova alla tensione V2(s), esce la corrente
I2 s IZ s
V2 s V1 s V2 s 1 1 K s
Z s
Z s
Cioè tutto avviene esattamente come se fra il nodo 1 e massa e fra il nodo 2 e massa fossero
collegate, rispettivamente, le impedenze Z'(s) e Z"(s) date dalla (10).
Esempio 1. Effetto Miller con impedenza resistiva.
Consideriamo un amplificatore di guadagno A reale con un
resistore R disposto fra l'ingresso e l'uscita. Applicando il teorema
di Miller, e trascurando l'impedenza d'ingresso dell'amplificatore, si
conclude che l'impedenza vista sul nodo d'ingresso è R/(1-A).
Questa resistenza d'ingresso è negativa quando il guadagno A è positivo, con modulo
maggiore dell'unità, altrimenti è positiva. Quando il guadagno ha segno negativo ed è molto elevato
(come nel caso degli operazionali), la resistenza d'ingresso R’ può assumere valori molto bassi (per
esempio con A = -105 e R = 100 k si ha R' = 1 ) e in tal caso si dice che il nodo d'ingresso si
comporta come una "terra virtuale" (pag. 28, parte VIII).
G.V. Pallottino – Maggio 2011
Università di Roma Sapienza - Dipartimento di Fisica
Appunti di Elettronica - Appendici
pag. 6
Esercizio. Calcolare l'impedenza d'ingresso, e individuarne la natura, di un amplificatore con funzione di trasferimento
A(s) = Ao/(1+s) (Ao = 1000 e = 1 ms) con un resistore R = 10 k disposto fra l'ingresso e l'uscita. Il calcolo va
eseguito approssimando 1-A(s) con -A(s) (e valutando poi il limite di frequenza entro cui tale approssimazione è
soddisfacente).
Esempio 2. Effetto Miller con impedenza capacitiva.
Consideriamo un amplificatore di guadagno A reale con un
condensatore C disposto fra l'ingresso e l'uscita. Applicando il teorema di
Miller, e trascurando la capacità d'ingresso dell'amplificatore, si conclude
che la capacità C’ che si manifesta fra il nodo d'ingresso e massa è
C' = C(1-A)
Questa capacità è negativa se il guadagno è positivo, con modulo maggiore dell'unità,
mentre è positiva quando il guadagno è negativo (e allora il circuito si comporta come
"moltiplicatore di capacità").
Il caso di guadagno positivo con A > 1 presenta qualche interesse perché permette di
realizzare una porta dotata di capacità negativa. A circuito aperto questo circuito è instabile, mentre
è stabile, e può risultare assai utile, quando ad esso venga collegata una capacità esterna (positiva)
che sia maggiore, in valore assoluto, di quella negativa.
Esercizio. Consideriamo una sorgente di segnale a gradino che sia osservabile attraverso un circuito RC con R S = 10 k
(in serie alla sorgente) e CS = 100 pF (rispetto a massa). All'uscita del circuito RC si colleghi un amplificatore ideale con
guadagno A = 10 e capacità C = 10 pF fra ingresso e uscita. Calcolate la capacità negativa introdotta dall'amplificatore,
la capacità totale sul nodo d'ingresso dell'amplificatore e il tempo di salita del segnale, confrontando quest'ultimo
risultato con quello relativo al caso in cui si impieghi un amplificatore usuale.
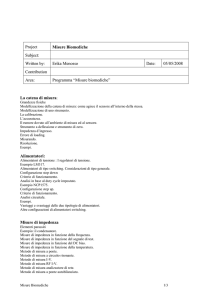
Esempio 3. Effetto Miller in un amplificatore a emettitore comune.
Utilizziamo il teorema di Miller
per analizzare il comportamento a
piccoli segnali dell'amplificatore a
emettitore
comune
mostrato
nella
figura, sapendo che il transistore
presenta guadagno in corrente hfe = 100
e supponendo di aver già calcolato la
corrente di polarizzazione del dispositivo (IC 3 mA, con 10 V di alimentazione). Notiamo
G.V. Pallottino – Maggio 2011
Università di Roma Sapienza - Dipartimento di Fisica
Appunti di Elettronica - Appendici
pag. 7
innanzitutto che il guadagno fra base e collettore è determinato approssimativamente dal rapporto
fra il resistore di collettore e quello d'emettitore: A 10. Utilizzando le formule (10) si hanno i
seguenti valori per le due resistenze equivalenti7 in parallelo all'ingresso e all'uscita:
R' 100 k/(1-A) 9.1 k
R" 100 k A/(A-1) 91 k
La resistenza d'ingresso totale Rin, fra base e massa, è data dal parallelo di R' e della
resistenza d'ingresso del transistore (approssimativamente pari a hfeRE 22 k) e si ha pertanto Rin
6.4 k. Questo ci permette di calcolare l'attenuazione fra la sorgente di segnale e la base del
transistore (trascurando l'impedenza del condensatore di accoppiamento): Rin/(Rin+RS) 0,39.
L'amplificazione totale Avs del circuito, fra la sorgente e l'uscita, vale pertanto - 3,9.
7 Queste resistenze equivalenti si manifestano per i segnali variabili (cioè “in alternata”) e in particolare non producono
alcun effetto per quanto riguarda la polarizzazione del circuito.
G.V. Pallottino – Maggio 2011
Università di Roma Sapienza - Dipartimento di Fisica
Appunti di Elettronica - Appendici
pag. 8
APPENDICE B
I DIAGRAMMI DI BODE
1. La rappresentazione grafica delle funzioni dei sistemi nel dominio della frequenza
Le rappresentazioni grafiche delle funzioni di rete e delle funzioni di trasferimento dei
sistemi maggiormente usate sono i diagrammi di Bode (Bode plots) e i diagrammi di Nyquist. I
primi rappresentano il modulo e la fase in funzione della frequenza, i secondi la parte reale e
immaginaria in forma polare.
Il diagramma di Nyquist di una funzione F(s),
posto s = j, è costituito dal luogo dei punti, al variare
di , che hanno per ascissa la parte reale della funzione e
come ordinata la parte immaginaria. Questo grafico si
traccia di solito per da 0 a , ma a volte lo si completa
chiudendolo, cioè considerando anche i valori di fra
- e 0, come mostrato in figura per la funzione
passabasso F(s)|s=j = 1/(1+j). Sebbene assai compatta, oltre che molto efficace ai fini
dell’immediata visualizzazione degli andamenti asintotici del modulo e della fase, la
rappresentazione di Nyquist presenta vari inconvenienti. Infatti non è affatto immediato tracciare
questi diagrammi e sopratutto modificarli; per esempio quando si voglia cambiare il valore di un
parametro oppure considerare il prodotto di una funzione già graficata per una seconda, volendo
considerare un secondo sistema disposto in cascata al primo. I diagrammi di Nyquist, inoltre, sono
difficilmente leggibili nel caso delle funzioni il cui modulo presenta variazioni di ordini di
grandezza nel campo di frequenze di interesse.
Questi inconvenienti sono largamente superati quando invece si utilizzano i diagrammi di
Bode, anche grazie all’impiego di scale logaritmiche per la frequenza e per il modulo. Si perde,
tuttavia, in compattezza dato che la rappresentazione di Bode richiede due grafici distinti.
G.V. Pallottino – Maggio 2011
Università di Roma Sapienza - Dipartimento di Fisica
Appunti di Elettronica - Appendici
pag. 9
I diagrammi di Bode di una funzione ne rappresentano separatamente il modulo espresso in
decibel ( parte I, pp. 27-28) e la fase in funzione del logaritmo della frequenza. Questo è il motivo
per cui tali grafici consentono un esame globale dell’andamento di una funzione anche su una
gamma di frequenze molto estesa e nello stesso tempo garantiscono un buona risoluzione di lettura
anche in presenza di grandi variazioni del modulo della funzione. Un altro pregio essenziale di
questa rappresentazione sta nella facilità con cui si tracciano i diagrammi in forma approssimata
(diagrammi asintotici) delle funzioni e con cui si ottiene il diagramma del prodotto di due funzioni.
Questo infatti consiste semplicemente nella somma dei diagrammi, rispettivamente del modulo e
della fase, delle due funzioni.
2. I diagrammi di Bode dei fattori standard
Consideriamo una generica funzione di rete o di sistema F(s), rappresentata da una funzione
razionale fratta della variabile complessa s. Fattorizzando tale funzione e ponendo s = j, i termini
che la costituiscono sono in generale una costante e una molteplicità di fattori monomi, binomi e
trinomi
(1)
K
(j)1
;
;
(1+j)1
;
(1+j/Qo-2/o2)1
dei quali esaminiamo in quanto segue il tracciamento sui diagrammi di Bode.
Al termine costante K corrisponde la costante 20 log K nel diagramma del modulo e fase
nulla in quello della fase. Il termine monomio (j)1, che a seconda del segno dell’esponente
corrisponde a un polo o a uno zero nell’origine, è rappresentato nel diagramma del modulo da una
retta
con
dB/decade
8
pendenza
di
20
che attraversa l’asse
delle ascisse nel punto = 1 rad/s,
come mostrato nella figura nel caso
di uno zero (esponente +1). La fase
ha valore costante, data dal prodotto
dell’esponente per /2. Si ha infatti:
(2)
20 log (j)1 = 20 log
(j)1 = /2
8
20 dB/decade è approssimativamente uguale a 6 dB/ottava. Ricordiamo che una decade rappresenta un intervallo di
frequenza i cui estremi sono in rapporto 10; un’ottava, un intervallo i cui estremi sono in rapporto 2.
G.V. Pallottino – Maggio 2011
Università di Roma Sapienza - Dipartimento di Fisica
Appunti di Elettronica - Appendici
pag. 10
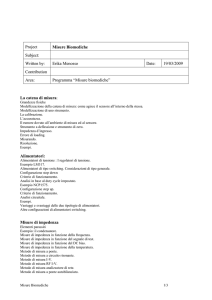
Per quanto riguarda il fattore binomio, che a seconda del segno dell’esponente corrisponde a
un polo o a uno zero9 reale alla pulsazione = 1/, si ha:
20 log (1+j)1 = 20 log [1+
(3)
(1+j)1 = arctang(
Cioè nel caso di un polo, al crescere di , l’ampiezza prima è costante (0 dB) poi diminuisce
tendendo ad annullarsi, mentre la fase prima è nulla e poi tende a -/2; nel caso di uno zero,
l’ampiezza prima è costante (0 dB) e poi aumenta tendendo all’infinito, mentre la fase prima è
nulla e poi tende a /2. Alla pulsazione caratteristica (), in particolare, il modulo vale 3 dB e
lo fase /4.
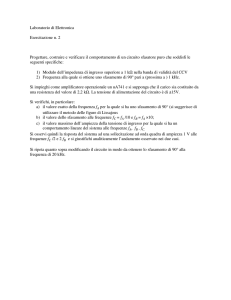
Esaminando la (3) si osserva che il diagramma del modulo presenta due asintoti. Il primo,
per << 1/ è una retta orizzontale coincidente con l’asse delle ascisse; il secondo, per >> 1/
con equazione 20log , è una retta con pendenza 20 dB, che attraversa le ascisse (incrociando
il primo asintoto) nel punto =1/ corrispondente alla pulsazione di taglio. Tracciando il primo
asintoto da - a 1/ e il secondo da 1/ e + si ottiene il diagramma asintotico, mostrato a tratto
pieno nella figura, che costituisce una rappresentazione approssimata ma spesso sufficiente. Lo
scarto massimo fra il diagramma asintotico e quello esatto, mostrato a tratteggio, è infatti di 3 dB.
Più precisamente, lo scarto è di 3 dB alla pulsazione =1/, e di 1 dB un’ottava sotto e una sopra,
come si ricava dalla (3).
Figura. Diagrammi di
Bode esatti (a tratteggio)
e approssimati (a tratto
pieno) per la funzione
1/(1+j).
Anche per la fase si può utilizzare una rappresentazione approssimata, considerandola nulla
fino a una decade sotto la pulsazione di taglio (1/10) e pari al valore asintotico (/2) oltre una
decade sopra (10), e raccordando le due semirette con un segmento, come nella parte a destra della
figura. In questa approssimazione lo scarto massimo, arctang(0.1) = 5.7° = 0,0997 rad, si ha nei due
punti di raccordo, cioè per = 1/10 e = 10/
9
Un caso particolare, sebbene poco frequente in pratica, si ha quando la parte reale dello zero è positiva; in tal caso lo
sfasamento è in ritardo, anziché in anticipo, variando fra 0 e -al crescere di
G.V. Pallottino – Maggio 2011
Università di Roma Sapienza - Dipartimento di Fisica
Appunti di Elettronica - Appendici
pag. 11
Consideriamo poi il fattore trinomio, che rappresenta una risonanza (più precisamente una
risonanza quando l’esponente vale –1, un’antirisonanza quando vale +1) ed è caratterizzato dalla
pulsazione o e dal fattore di merito Q10. Le espressioni esatte sono le seguenti:
(4)
20 log [(1 - /o2)2 + (/oQ)2]½
(4a)
arctang [(/oQ)/( 1 - /o2)]
Il diagramma del modulo presenta due asintoti, come nel caso del fattore binomio, che si incrociano
nel punto = o: uno orizzontale e l’altro inclinato, ma con pendenza doppia (40 dB/decade). Ma
qui lo scarto fra i diagrammi asintotici e quelli esatti dipende dal valore del fattore di merito Q (o
dello smorzamento , ricordando che = 1/2Q).Se Q = ½ ( nota 9), lo scarto massimo è 6 dB a
= o. Al crescere di Q lo scarto massimo tende a 20 log Q, come è mostrato nella figura a sinistra
che rappresenta il diagramma del modulo per vari valori di Q nel caso di esponente –1 (due poli
complessi coniugati).
o
Anche il diagramma della fase dipende fortemente dal fattore di merito, come mostra la figura a
destra: si nota in particolare che al crescere del fattore di merito la variazione della fase diventa
sempre più rapida in prossimità della pulsazione caratteristica o, dove peraltro la fase ha sempre
valore costante /2.
10
Si noti che per valori di Q < ½ il fattore trinomio degenera nel prodotto di due fattori binomi (corrispondenti a due
poli reali distinti); per Q = ½, nel quadrato di un fattore binomio con = 1/o (corrispondente a due poli reali
coincidenti).
G.V. Pallottino – Maggio 2011
Università di Roma Sapienza - Dipartimento di Fisica
Appunti di Elettronica - Appendici
pag. 12
Consideriamo infine la presenza nella funzione F(s) di un fattore di ritardo exp(-sT). Questo
termine può rappresentare un ritardo effettivo oppure l’effetto di poli e zeri non modellizzati nella
funzione, perché intervengono a frequenze più alte della regione che si intende considerare, ma che
in tale regione11 offrono contributi non trascurabili alla fase. La fase dovuta a poli e zeri reali non
modellizzati può infatti essere rappresentata approssimativamente con la seguente approssimazione:
[j (1+zjs)/i (1+pis)]exp(-pis +zjs) = exp(-Ts).
Il termine di ritardo exp(-Ts) presenta modulo unitario (0 dB) e ritardo di fase linearmente
crescente con , cioè con andamento esponenziale nel diagramma della fase.
3. La composizione dei diagrammi di Bode
L’esame preliminare di una funzione F(s) consente di stabilirne i valori asintotici del modulo e della
fase per 0 e per , e di verificare che i diagrammi rispettino queste condizioni limite.
Scrivendo la funzione nella forma generale non fattorizzata
m
b s
N s
F s
D s
a s
j 0
n
(5)
i 0
j
j
i
i
il limite per del modulo di F(j) è (bm/an)m-n, a cui corrisponde nel diagramma di Bode un
asintoto ad alta frequenza con pendenza 20(m-n) dB/decade; il limite della fase è costante e vale
(m-n)/2.
Se la funzione non possiede poli o zeri all’origine, e allora i coefficienti ao e bo sono
entrambi diversi da zero, il limite per 0 del modulo di F(j) è costante, di valore (bo/ao), e la
fase è nulla. Se la funzione possiede p poli oppure z zeri all’origine (e allora saranno
corrispondentemente nulli alcuni coefficienti del denominatore o del numeratore), l’andamento del
modulo della funzione per 0 è proporzionale a -p oppure a z, a cui corrisponde nel diagramma
del modulo un asintoto a bassa frequenza con pendenza -p oppure +z; il limite della fase per 0 è
costante e vale –p/2 oppure +z/2.
I diagrammi di Bode della funzione scritta in forma fattorizzata si ottengono tracciando i
diagrammi asintotici di tutti i fattori che la costituiscono e sommandone i contributi. Se lo si ritiene
11
Abbiamo visto che un polo reale ritarda la fase di 0.1 rad 5.7° una decade sotto la frequenza di taglio.
G.V. Pallottino – Maggio 2011
Università di Roma Sapienza - Dipartimento di Fisica
Appunti di Elettronica - Appendici
pag. 13
necessario, si apporteranno le correzioni: per i fattori binomi, 3 dB alla frequenza di taglio e 1 dB
un’ottava sotto e un’ottava sopra; per i fattori trinomi, utilizzando le espressioni esatte (4) e (4a)
oppure i grafici dettagliati riportati in vari testi.
Esempio 1. Si considera la funzione F(s)=3,16s/(1+s/10)(1+s/104)(1+s/3∙104), con uno zero
nell’origine e tre poli reali. La figura a sinistra, che rappresenta i moduli, mostra i diagrammi
asintotici dei termini che costituiscono la funzione e il diagramma asintotico complessivo, in tratto
spesso, costruito sommandoli. La figura a destra, costruita analogamente, rappresenta la fase.
Esempio 2. Si considera la funzione F(s) =(1+s/20)/(1+s/200)(1+s/2000), con due poli reali e uno
zero reale. Qui al diagramma asintotico del modulo (tratto grosso) sono state apportate le correzioni
per ottenere il diagramma esatto (tratto sottile).
G.V. Pallottino – Maggio 2011
Università di Roma Sapienza - Dipartimento di Fisica
Appunti di Elettronica - Appendici
pag. 14
Esercizio 1. Tracciate i diagrammi di Bode della funzione di trasferimento di una rete “ritardatrice di fase”:
H(s) = 0,5(1+104s)/(1+103s). Disegnate un circuito che realizza tale funzione: a) usando elementi passivi R e C, b)
usando un amplificatore operazionale ed elementi passivi R e C.
Esercizio 2. Tracciate i diagrammi di Bode della funzione di trasferimento di una rete “anticipatrice di fase”:
H(s) = 0,1(1+103s)/(1+104s). Disegnate un circuito che realizza tale funzione: a) usando elementi passivi R e C, b)
usando un amplificatore operazionale ed elementi passivi R e C.
Esercizio 3. Un amplificatore con guadagno 106 viene impiegato in un circuito a controreazione con funzione di
trasferimento ad anello aperto ( pag. 3 parte VIII) L(s) = -106/(1+s/210)(1+s/2103)(1+s/2104). Tracciate i
diagrammi di Bode della funzione per stabilire il valore del parametro per cui l’amplificatore reazionato diventa
instabile, cioè vi è una frequenza a cui la fase di L(j) si annulla e il modulo è unitario (0 dB).
Osservazione finale: qualora per tracciare i diagrammi di Bode si ricorra al calcolatore,
occorre fare attenzione alla corretta determinazione della fase per evitare i problemi discussi a pag.
23 della parte V.
G.V. Pallottino – Maggio 2011
Università di Roma Sapienza - Dipartimento di Fisica
Appunti di Elettronica - Appendici
pag. 15
APPENDICE C
L’AFFIDABILITA’
1. Cenni sull’affidabilità
L’affidabilità (reliability) R(t) di un oggetto (elemento, circuito o sistema) rappresenta la
sua probabilità di sopravvivenza funzionale in condizioni operative specificate (per esempio a una
data temperatura) dopo un tempo t dalla sua messa in funzione12. Questa funzione può essere
stimata sperimentalmente mettendo in funzione N(0) oggetti a un dato istante (t = 0) e determinando
quanti di essi N(t) sopravvivono in funzione del tempo trascorso t. Si ottiene così la stima (funzione
del tempo):
(1)
R(t) = N(t)/N(0)
Il complemento all’unità dell’affidabilità è la probabilità di guasto F(t) o inaffidabilità:
F(t) = 1 – R(t)
Derivando la (1) rispetto al tempo si ha: dR/dt = (1/N(0))dN/dt. Dividendo membro a
membro per la (1) si ricava: (1/N(t)) dN/dt = (1/R(t)) dR/dt , che rappresenta la variazione relativa
del numero degli oggetti nel tempuscolo dt. Questa grandezza, cambiata di segno, prende il nome di
tasso di guasto (failure rate):
(2)
(t )
1 dN
1 dR
N (t ) dt
R(t ) dt
Integrando la precedente e tenendo conto che R = 1 per t = 0, si ricava infine:
t
R(t ) exp ( )d
0
(3)
Se il tasso di guasto non dipende dal tempo, allora si trova che l’affidabilità segue la legge
di decadimento esponenziale:
12
I. Bazovsky Principi e metodi dell’affidabilità Etas Kompass, Milano, 1969
Theory of Reliability a cura di A.Serra e R.E.Barlow, Atti della scuola internazionale di fisica Enrico Fermi (1986),
North Holland, Amsterdam, 1986
Manuale NIST Engineering Statistics Handbook : http://www.itl.nist.gov/div 898/handbook/apr/apr.htm
G.V. Pallottino – Maggio 2011
Università di Roma Sapienza - Dipartimento di Fisica
Appunti di Elettronica - Appendici
pag. 16
(4)
R(t) = exp (-t)
Il reciproco di prende il nome di tempo medio fra i guasti MTBF (mean time beween
failures): MTBF = 1/ Questa grandezza viene misurata in pratica come il valor medio degli
intervalli di tempo fra un guasto e l’altro di un apparato in prova.
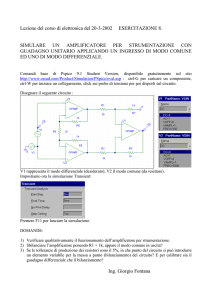
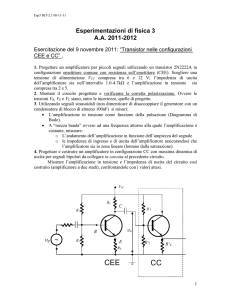
In generale il tasso di guasto non è costante nel ciclo di vita dell’oggetto considerato. In
molti casi di interesse pratico l’andamento è quello a forma di vasca da bagno (bathtube), mostrato
nella figura. La parte iniziale della curva (mortalità infantile) dipende da difetti di fabbricazione o di
montaggio che si manifestano nel primo periodo di funzionamento (circa 1 anno per i circuiti
integrati). La parte successiva, che dipende dai guasti casuali (random failures), si estende su tempi
assai più lunghi (in particolare, per i componenti elettronici). La parte finale, con una crescita lenta
e graduale di , rappresenta l’invecchiamento o il deterioramento dei componenti.
(t)
invecchiamento
mortalità
infantile
tempo
L’affidabilità R(t) di un sistema costituito da più componenti, ciascuno dei quali sia
essenziale per il suo funzionamento (in tal caso si dice che tali componenti sono “in serie” dal punto
di vista affidabilistico) è data dal prodotto delle affidabilità Ri(t) di ciascuno di questi:
R(t) = Ri(t).Nel caso di guasti casuali (i = cost) si ha:
(5)
R(t) = Ri(t) = exp (-it) = exp (-t)
dove il tasso di guasto complessivo è = i
Ne consegue che l’affidabilità di un sistema costituito da più parti componenti diminuisce
assai rapidamente al crescere del loro numero. E qui sono evidenti i vantaggi offerti dall’elettronica
integrata: un singolo circuito integrato, che può comprendere un numero anche assai elevato di
elementi, ma che costituisce un unico oggetto fisico, ha affidabilità assai maggiore di quella di una
realizzazione in forma “discreta”, cioè ottenuta mettendo assieme i singoli elementi (pensiamo
soltanto al numero delle saldature necessarie).
G.V. Pallottino – Maggio 2011
Università di Roma Sapienza - Dipartimento di Fisica
Appunti di Elettronica - Appendici
pag. 17
2. I criteri per ottenere elevata affidabilità
I criteri seguiti nella progettazione dei sistemi allo scopo di ottenere elevata affidabilità
consistono in generale: a) nell’impiego di componenti di alta affidabilità (ottenuti anche mediante
tecniche di scelta o vagliatura (screening) dei componenti); b) nel prevedere che i componenti siano
impiegati a livelli di sollecitazione (elettrici, termici, meccanici, ecc.) inferiori a quelli per cui essi
sono stati progettati); c)
nell’uso di tecniche di ridondanza o di tolleranza ai guasti (fault
tolerance).
Il criterio della ridondanza consiste nel far sì che il funzionamento di un sistema non
dipenda criticamente dal funzionamento di tutti i suoi componenti. Si dice, in tal caso, che i
componenti dal punto di vista affidabilistico non sono disposti “in serie” (in tal caso il guasto di uno
di essi produrrebbe il guasto dell’intero sistema), ma “in parallelo” (e allora il sistema è soggetto a
guasto solo quando si sono guastati tutti i componenti disposti “in parallelo”). Questo criterio
consente di migliorare notevolmente l’affidabilità. Per esempio, ponendo “in parallelo” due
elementi con probabilità di guasto F1 = 1 - R1 ed F2 = 1 - R2, la probabilità che entrambi si guastino
è F = F1 F2, sicché l’affidabilità complessiva è R = 1 - F = 1 - F1 F2 = R1+R2 - R1R2, che è assai
maggiore di quella dell’uno o dell’altro dei due componenti.
Questa soluzione può essere adottata anche a livello del singolo componente impiegando la
configurazione denominata quad. Cioè sostituendo il componente (per esempio un condensatore di
filtraggio di un alimentatore) con quattro identici collegati circuitalmente in serie-parallelo come
indicato sotto.
Esercizio. Calcolate la probabilità di guasto F della disposizione in serie (circuitalmente) di due elementi come somma
della probabilità che il circuito risulti aperto e di quella che risulti chiuso in cortocircuito, in funzione delle probabilità
di guasto del singolo componente (fc per il guasto in corto ed fo per il guasto a circuito aperto). Ripetete il calcolo nel
caso della disposizione in parallelo (circuitalmente) dei due elementi. Valutate infine quale sia la scelta più conveniente
in relazione al valore del rapporto fc/fo.
Tuttavia di solito la ridondanza viene attuata, più significativamente, a livello di
sottosistema. Per esempio disponendo “in parallelo” due amplificatori e utilizzando poi un deviatore
(che ovviamente deve essere assai più affidabile del resto) per scegliere quale di essi utilizzare
G.V. Pallottino – Maggio 2011
Università di Roma Sapienza - Dipartimento di Fisica
Appunti di Elettronica - Appendici
pag. 18
effettivamente. O addirittura (criterio di riconfigurabilità) affidando al software di un sistema
digitale il compito di utilizzare l’uno o l’altro sottosistema (per esempio un banco di memoria o un
microprocessore) a seconda del suo stato di funzionalità.
Per disporre di componenti di elevata affidabilità si seguono varie strade, in ogni caso,
ovviamente, utilizzando oggetti già rodati, cioè che abbiano già “vissuto” a sufficienza, superando
la fase della mortalità infantile. Una di queste consiste nell’utilizzare dispositivi (evidentemente
assai più costosi del normale) costruiti in condizioni controllate, in linee di produzione speciali per
le esigenze del mercato militare e spaziale. Un’altra consiste nel “qualificare” 13 i componenti,
eseguendo su di essi varie prove (cicli termici ripetuti, vibrazioni meccaniche, prove radiografiche,
prove di rumore, ecc.). Queste prove sono mirate sia a scoprire difetti (contaminazioni superficiali,
difetti strutturali, ecc.) che si sarebbero potuti manifestare in tempi successivi, sia a verificare il
comportamento dei dispositivi in condizioni di elevate sollecitazioni.
Un altro criterio consiste nel prevedere che i componenti siano impiegati in condizioni di
sollecitazione (elettrica, termica, meccanica, ecc.) decisamente inferiori a quelle per cui essi sono
stati progettati. Il motivo è che, in generale, l’affidabilità dipende dal livello di sollecitazione in
condizioni di esercizio. Essa, in particolare, diminuisce all’aumentare della temperatura (del resto è
ben noto che un resistore che “scalda troppo” finisce male presto!) sicchè conviene “deratare”, cioè,
tutte le volte che è possibile, scegliere componenti più “robusti” rispetto a quanto strettamente
necessario. Per esempio, scegliere un resistore da 1 W e non da 250 mW quando la dissipazione
prevista è di 100 mW; usare un transistore con tensione limite inversa di almeno 100 V quando si
prevede che esso sarà soggetto a non più di 30 V; ecc.
In particolare, il fatto che l’affidabilità diminuisce all’aumentare della temperatura viene
sfruttato nelle prove di vita accelerate a caldo (burn in) a cui si sottopongono talvolta i componenti,
prima di impiegarli, allo scopo di fargli attraversare più rapidamente il periodo iniziale
caratterizzato da alto tasso di guasto. Notiamo anche che la dipendenza dell’affidabilità dalla
temperatura viene posta spesso in relazione con la legge di Arrhenius (la velocità delle reazioni
chimiche raddoppia per ogni aumento di 10-20 K della temperatura), attribuendogli dunque una
dipendenza esponenziale dalla temperatura. Si considera allora il modello
(6)
13
R(T ) R(T0 ) exp kEa
1
T
T10
In realtà quello che si qualifica è il lotto o la linea di produzione, non il singolo componente maltrattato dalle prove.
G.V. Pallottino – Maggio 2011
Università di Roma Sapienza - Dipartimento di Fisica
Appunti di Elettronica - Appendici
pag. 19
dove k è la costante di Boltzmann, Ea l’energia di attivazione caratteristica del processo di
degradazione (con valori tipici di una frazione di eV).
Notiamo infine che i calcoli di affidabilità sono spesso poco affidabili in assoluto e dunque
solamente indicativi (in pratica sono verificati sperimentalmente entro mezzo ordine di grandezza),
sopratutto per la difficoltà di procurare dati di affidabilità sui componenti, che siano a loro volta
sufficientemente affidabili. Questi calcoli sono tuttavia certamente assai utili nel confronto fra
diverse soluzioni di progetto.
Ricordiamo infine che nei calcoli di affidabilità si usa impiegare opportuni fattori, per
esempio relativi alla effettiva temperatura di lavoro dei componenti e al livello delle sollecitazioni
ambientali, che vanno a moltiplicare i valori di .Valori approssimati di questi coefficienti sono i
seguenti.
Per la temperatura
Per le sollecitazioni ambientali
apparati fissi di terra 1
apparati mobili
G.V. Pallottino – Maggio 2011
Università di Roma Sapienza - Dipartimento di Fisica
T (C)
4
0-20
1
40
1,3
60
2
80
4
apparati su missili
100
10
120
30
10
Appunti di Elettronica - Appendici
pag. 20