L’avviamento dei motori asincroni
Un problema rilevante è quello dell’avviamento dei motori.
Nei motori asincroni infatti, durante l’avviamento, circolano nel motore correnti notevoli sia perché
la resistenza dell’avvolgimento è molto bassa, sia perché in tale istante la tensione indotta nel rotore
è massima. Analogamente al trasformatore queste correnti rotoriche richiamano nello statore elevate
correnti (fino a 8 ÷ 10 volte quella corrispondente al carico nominale), che riscaldano
eccessivamente il motore e provocano cadute di tensione inammissibili sulla linea di alimentazione.
Inoltre queste correnti, fortemente sfasate all’avviamento, determinano piccole coppie motrici allo
spunto. Ciò è osservabile sulla caratteristica meccanica: la coppia di spunto è notevolmente
inferiore alla coppia massima e spesso minore della stessa coppia corrispondente alla potenza
nominale. Per tale motivo il motore può avviarsi solo a vuoto, oppure con coppia resistente molto
ridotta.
In pratica, soltanto per motori piccoli (sino alla potenza di 2 – 3 kW), si ricorre all’inserzione
diretta, mentre negli altri casi si adottano accorgimenti atti a ridurre il valore dell’intensità di
corrente all’avviamento e elevare il valore della coppia di spunto.
L’ipotesi di alimentare il motore a tensione ridotta non sempre è praticabile perché, se da un lato
diminuisce la corrente assorbita, dall’altro la coppia di spunto si riduce ulteriormente peggiorando
l’avviamento: è dimostrabile infatti che la coppia motrice è proporzionale all’incirca al quadrato
della tensione di alimentazione.
Consideriamo separatamente le due categorie di motori alle quali abbiamo già accennato,
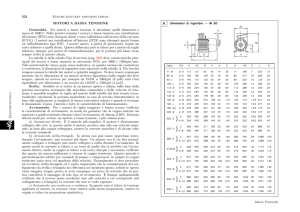
cominciando a vedere l’avviamento dei motori con rotore avvolto. La particolare costituzione del
rotore con il sistema degli anelli e delle spazzole, permette di modificare temporaneamente
l’impedenza del circuito rotorico con l’inserzione di resistenze ausiliarie: di fatto si collega alle
spazzole con reostato trifase (di avviamento) (Figura 1).
Si porta inizialmente il reostato nella posizione di massima resistenza. Dopo aver chiuso
l’interruttore di linea, si escludono gradualmente le resistenze del reostato man mano che il motore
prende velocità fino a escluderle completamente quando raggiunge una velocità prossima alla
nominale. Si chiudono quindi in corto circuito gli anelli e si sollevano le spazzole mediante un
particolare dispositivo.
L’effetto di queste operazioni comporta in primo luogo lo spostamento del punto che corrisponde
alla coppia massima verso la condizione di avviamento. Osserviamo la Figura 1b: quando tutte le
resistenze del reostato sono inserite si ottiene la curva r3; la coppia massima si ha in prossimità del
punto n = 0 (motore fermo). Diminuendo le resistenze inserite, si passa successivamente alle
caratteristiche r2, r1 fino alla r0 corrispondente al funzionamento normale, senza resistenze inserite
nel circuito rotorico. L’inserzione di resistenze nel circuito rotorico permette quindi di ottenere,
attraverso il gioco delle successive caratteristiche meccaniche, alte coppie allo spunto. Inoltre esse,
aumentandone l’impedenza totale, permettono di diminuire la corrente assorbita all’atto
dell’avviamento. Con tale sistema si riesce a limitare la corrente di spunto a valori dell’ordine 1,2 ÷
2 volte la corrente nominale ed ottenere coppie dell’ordine di 1 ÷2 volte la nominale.
L’altro tipo di motore (con rotore a gabbia) ha i conduttori del rotore chiusi permanentemente in
corto circuito e non è quindi possibile l’inserzione di reostati d’avviamento. Questo all’avviamento
assorbe una corrente di circa 5 volte la corrente nominale con coppia di spunto un po’ inferiore alla
normale.
Poiché la costituzione della macchina è robusta, se gli avviamenti non si susseguono a brevi
intervalli di tempo, si può ricorrere, come detto, all’inserzione diretta quando la potenza non supera
i 2 ÷ 3 kW. Per potenze più elevate, anche per questo tipo di motore, si adottano alcuni accorgimenti
che favoriscono le condizioni d’avviamento. Uno di questi è quello di realizzare un rotore a doppia
gabbia (Figura 2).
Il rotore di questo motore è provvisto di due gabbie concentriche aventi caratteristiche tra loro
molto diverse. L’esterna (di avviamento), è costituita da sbarre di rame di piccola sezione e perciò di
grande resistenza; l’interna (di lavoro), è costituita da sbarre di grande sezione e perciò di piccola
resistenza. (Re >> Ri)
Inoltre le due gabbie, essendo diversamente affondate nel ferro, presentano valori tra loro diversi
nella reattanza di dispersione: la gabbia esterna ha reattanza minima, quella interna massima. (La
gabbia interna, essendo molto più immersa nel ferro rotorico, è autoconcatenata con una maggior
quantità di flusso disperso così da avere un coefficiente di autoinduzione molto maggiore Ld2i >>
Ld2e Þ Xe << Xi)
In altre parole, la gabbia esterna presenta maggiore resistenza e minor induttanza, viceversa
l’interna.
Ciò comporta che all’avviamento, a frequenza di rete, la gabbia interna presenta una impedenza più
elevata e le correnti che l’attraversano sono ridotte; la gabbia esterna, invece, presenta una
impedenza minore, pur avendo una resistenza maggiore, per cui la corrente rotorica circolerà
prevalentemente nella gabbia esterna. Poiché questo circuito è fortemente ohmico svilupperà una
elevata coppia di spunto.
Quando esso accelera, le frequenze rotoriche diminuiranno fino a ridursi a qualche frazione di Hertz
(velocità a vuoto) o pochi Hertz (velocità a carico nominale); pertanto le reattanze delle due gabbie
diminuiscono e, col motore in piena velocità, assumono valori trascurabili: le correnti si
distribuiscono nei due avvolgimenti in proporzione alle loro sezioni. Quindi, ad avviamento fatto, la
corrente indotta circola prevalentemente nella gabbia interna.
Con questo mezzo si possono avere coppie di avviamento fino a 2 volte quella nominale con punte
di corrente intorno a 4 volte la corrente nominale.
Sul principio dell’“effetto pelle” invece sono costituiti motori a cave profonde in cui l’avvolgimento
rotorico è costituito da una serie di sbarre strette ed alte (Figura 3).
La cava è stretta e molto profonda e segue l’andamento del conduttore: è una piattina. Si fa questo
affinché, all’avviamento, la corrente vada ad interessare solo la parte più vicina al traferro della
piattina. Infatti più ci si avvicina al traferro meno linee di flusso si concatenano con la fettina di
piattina; questo implica una bassa f.e.m. indotta che si oppone alla corrente che l’ha creata, da cui
segue che la corrente è maggiore nelle vicinanze del traferro; questo è dovuto all’effetto pellicolare
che si verifica all’avviamento in quanto le correnti sono anch’esse a frequenza di 50 Hz: quella
verso il traferro, a maggior resistenza, si comporta come la gabbia esterna, mentre quella più
profondamente incassata nel ferro, di maggior reattanza, funziona da gabbia interna.
All’avviamento, avremo un maggior addensamento della corrente sulla parte alte della barra che,
interessando una parte relativamente piccola della sezione della barra stessa, presenta una resistenza
rotorica piuttosto elevata, addensamento che si ridistribuirà poi, gradualmente, verso la parte bassa,
man mano che la velocità cresce; a regime, tutta la sezione della barra viene uniformemente
interessata dalla corrente con una conseguente progressiva diminuzione delle resistenze rotoriche.
In questo modo si è limitata la corrente di avviamento; all’aumentare della velocità del rotore
diminuisce lo scorrimento e la frequenza, da cui segue che la corrente va ad interessare una
maggiore sezione della piattina, questo implica una diminuzione della resistenza che questa offre
alla corrente, infatti si ha:
Per cui s diminuisce all’aumentare di n. La frequenza delle correnti indotte è pari a:
f2 = s·f1
Essa, pertanto, diminuisce al diminuire dello scorrimento cioè all’aumentare di n.
Le caratteristiche di questi motori sono intermedie fra quelle dei motori a gabbia semplice e quelle a
doppia gabbia, presentando rispetto a questi ultimi una maggiore semplicità costruttiva.
Esistono diversi altri metodi di avviamento realizzabili agendo sul circuito statorico (sempre per
motori a gabbia).
Essi servono solo per diminuire la corrente di spunto, essendo basati sul principio di abbassare
temporaneamente la tensione di alimentazione. Poiché con essa si abbassa anche la coppia di
spunto, questi sistemi possono essere validi per motori che hanno una piccola coppia resistente
applicata all’albero.
Parleremo di uno dei più diffusi che va sotto il nome di avviamento stella/triangolo.
Esso consiste nell’avviare il motore con l’avvolgimento statorico collegato a stella, per poi
collegarlo a triangolo ad avviamento avvenuto.
Ricordando quanto visto sui sistemi trifase, il collegamento a stella dell’avvolgimento statorico,
nella fase d’avviamento, comporta i seguenti vantaggi:
1. la tensione applicata ad ogni fase è
morsetti del motore);
volte la tensione concatenata (tensione applicata ai
2. la corrente assorbita dalle fasi statoriche collegate a stella è
rispetto a quella che
circolerebbe nelle fasi collegate a triangolo;
3. poiché anche in linea la corrente risulta nel minore di
nel collegamento a stella rispetto a
quello a triangolo, complessivamente all’avviamento il motore assorbe una corrente pari a
1/3 di quella che assorbirebbe con le fasi collegate a triangolo.
Osserviamo che anche la coppia si riduce a 1/3 di quella ottenibile con le fasi collegate a triangolo.
Per permettere questo tipo di avviamento, la parte frontale della carcassa è munita di una basetta
isolante con i morsetti ai quali vengono collegati i terminali delle fasi costituenti l’avvolgimento. Se
la basetta porta 6 morsetti disposti su due file, ai quali vengono collegati i principi P 1, P2, P3 e le
fini nell’ordine F3, F1, F2 dell’avvolgimento trifase, possiamo ottenere con delle sbarrette di rame i
due tipi collegamenti, Figura 4.
Osserviamo infine che oggi i dispositivi di avviamento, sia rotorici che statorici, sono quasi sempre
comandati automaticamente anziché a comando manuale. Ciò consente di eliminare false manovre,
di realizzare comandi a distanza e di avere minori perdite di tempo nell’esercizio.
Sappiamo però che non tutte le reti di alimentazione elettriche sono trifase. Vista l’importanza
dell’utilizzazione monofase, si è voluto usare anche negli impianti a corrente alternata monofase il
robusto, poco costoso motore asincrono, che non richiede alcuna manutenzione, soprattutto come il
motore a gabbia di scoiattolo.
Come può funzionare un motore asincrono monofase?
Sappiamo che a fondamento del funzionamento del motore asincrono c’è il suo campo rotante:
anche nel motore asincrono monofase si deve perciò produrre con una corrente alternata monofase
un campo rotante.
Supponiamo di alimentare una bobina percorsa da corrente alternata: ha origine un campo
alternativo, il cui valore cambia in continuazione e la cui direzione si inverte periodicamente. Non
si ha cioè un campo rotante. Se però la macchina ha due avvolgimenti posti a 90° uno dall’altro e se
vi sono componenti aggiuntivi come condensatori, resistori o induttori, si può produrre, anche con
corrente alternata monofase, un campo rotante.
In altre parole, costruttivamente i motori asincroni monofasi hanno l’avvolgimento di statore
costituito da una sola fase (avvolgimento principale); viene però munito di un secondo
avvolgimento statorico (ausiliario o di avviamento) situato a 90° elettrici rispetto all’avvolgimento
principale. Questo avvolgimento è percorso da una corrente fortemente sfasata rispetto a quella
dell’avvolgimento principale. La combinazione dei due campi genera così un campo rotante e il
motore diventa quindi autoavviante.
Non appena il rotore ha acquistato una velocità prossima a quella di regime, l’avvolgimento
ausiliario viene disinserito.
I sistemi adottati per creare lo sfasamento tra le correnti dei due avvolgimenti sono diversi.
Ricordiamo principalmente:
1. motori con avvolgimento ausiliario resistivo: l’avvolgimento ausiliario è costituito da
conduttori ad elevata resistenza.
La corrente che vi circola è quasi in fase con la tensione, mentre quella dell’avvolgimento
principale, essendo questo prevalentemente induttivo, è più sfasata.
Essi vengono impiegati nei casi in cui non è richiesta una forte coppia di spunto.
1. motori con circuito ausiliario capacitivo: l’avvolgimento ausiliario ha collegato in serie un
condensatore, che sfasa la corrente in anticipo di circa 90° rispetto a quella
dell’avvolgimento principale. Questi motori hanno forti coppie di avviamento: 1,5 ÷ 3,5
volte la coppia nominale.
Ricordiamo che i motori monofase a induzione hanno diffuse applicazioni sia nel settore degli
apparecchi elettrodomestici (lavatrici, lavastoviglie, lucidatrici, ecc...) che nel campo industriale
(ventilatori, condizionatori, bruciatori, ecc..).