Università degli Studi di Bergamo
Corso di Laurea in Ingegneria Tessile
Corso di Elementi di Meccanica
Esercitazione 6 - Dinamica del punto materiale e
del corpo rigido
Esercizio n.1
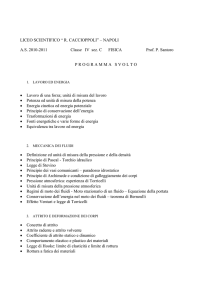
Studiare la dinamica del sistema al variare del rapporto tra le masse dei due corpi m 1 e m 2 . Tra
il piano inclinato e il corpo 2 c’è attrito statico di coefficiente f S e attrito radente di coefficiente f R .
A
2
α
1
Figura 1.a
Analisi cinematica del sistema
Il sistema è formato da due corpi dotati di massa connessi da una fune che si impegna su una
carrucola nel punto A. Il corpo 1, quindi, è sospeso mediante la fune, mentre il corpo 2 è sorretto
sia dal piano inclinato che dalla fune stessa.
Il sistema è dotato di un grado di libertà, ovvero i due corpi possono traslare lungo l’asse della
fune (nelle direzioni che questo assume in prossimità dei corpi, come mostrati nella figura 1.a).
1
I due corpi, al variare del rapporto m
m 2 , possono essere sia in equilibrio che in moto accelerato.
1
Data la presenza di attrito fra il piano inclinato e il corpo 2, esiste una gamma di valori per m
m 2 che
soddisfano la condizione di equilibrio statico. Al di fuori di questa gamma il moto dei corpi è
1
accelerato, ma con versi differenti a seconda del valore di m
m2 .
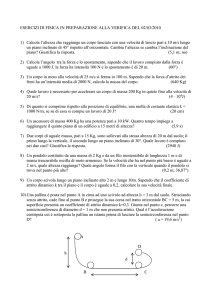
Possiamo esprimere la posizione del corpo 1 rispetto alla sommità del triangolo che forma il
piano inclinato mediante la variabile x, come indicato in figura 1.b. Così facendo assumiamo
positive le velocità x e le accelerazioni x del corpo 1 dirette verso il basso. Analogamente
individuiamo la posizione del corpo 2 rispetto allo stesso punto mediante la variabile y e le sue
derivate y e ÿ.
1
. ..
y, y, y
. ..
x, x, x
2
1
Figura 1.b
Considerando la fune inestensibile si può trovare un legame tra le velocità dei due corpi,
ovvero
x
y
Derivando questa relazione rispetto al tempo otteniamo la relazione tra le accelerazioni
x
ÿ
Equazioni della statica
1
La presenza di attrito fa sì che esistano più valori del rapporto m
m 2 che soddisfano la
condizione di equilibrio. Infatti il modulo della forza T di attrito in condizioni statiche può
assumere valori compresi nell’intervallo
0
T
fSN
dove N è la componente perpendicolare alla superficie della forza scambiata tra il corpo e la
superficie stessa. La forza T è diretta parallelamente alla superficie di contatto con verso opposto
alla componente, lungo la stessa direzione, della risultante delle altre forze agenti sul corpo.
Non conoscendo il valore delle masse, e di conseguenza il verso della risultante sul corpo 2, il
verso della forza di attrito indicato in figura 1.c è puramente indicativo.
2
F
F
N
1
2
T
m2 gsinα
m1 g
m2 gcosα
Figura 1.c
1
In questo caso le equazioni di equilibrio ci consentono di calcolare il valore del rapporto m
m2
m1g
F
N
m 2 g cos
F
0
m 2 g sin
0
T
0
Il valore della forza di attrito T è però incognito, l’unica relazione valida è fornita dalla legge di
Coulomb
T
fSN
Introducendo la relazione precedente il sistema può essere risolto fornendo
F
N
m1g
m 2 g cos
|m 1
m 2 sin |
f S m 2 cos
La discussione della disequazione ci consente di trovare gli estremi dell’intervallo desiderato
1
per il rapporto m
m . Si devono affrontare due casi
2
m1
m2
m1
m2
sin
sin
m1
m2
m1
m2
sin
sin
f S cos
f S cos
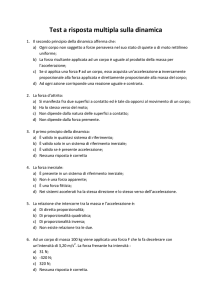
Il risultato ottenuto in caso di equilibrio statico può essere riassunto nel seguente diagramma
3
m1
m2
fS
π α
2
arctan 1
fS
arctan fS
Figura 1.d
1
1
dove la linea rossa rappresenta l’equazione m
sin
sin
f S cos , la linea verde m
m2
m2
m
(equilibrio statico in assenza di attrito) e la linea blu m 1
sin
f S cos . L’area tratteggiata
2
m
1
rappresenta il luogo dei punti m ,
in cui c’è condizione di equilibrio statico (naturalmente,
2
l’area tratteggiata non include l’area triangolare al di sotto dell’asse delle ascisse poiché ciò
1
implicherebbe m
0 , il che significa che una delle due masse avrebbe segno negativo).
m2
Si può facilmente determinare che il punto d’intersezione della curva blu con l’asse delle
ascisse è pari a arctan f S ; quando l’angolo assume valori minori di arctan f S , la condizione è tale
per cui il corpo 2 non ha bisogno della massa 1 per rimanere in equilibrio, ma lo è già grazie alla
forza d’attrito.
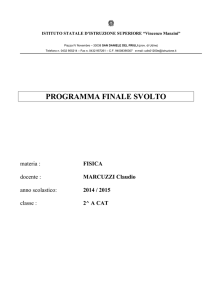
Equazioni della dinamica
Analogamente a quanto fatto per la statica, possiamo supporre un verso per le velocità (in
modo da stabilire il verso della forza di attrito radente) e calcolarne il valore in funzione del
1
rapporto m
m 2 . Impiegando il principio di d’Alembert si evidenziano le forze d’inerzia, come
mostrato in figura 1.e.
..
m1 x
F
F
..
m2 y
1
N
2
TR
m2gsinα
m1 g
m2 gcosα
Figura 1.e
Dato che il sistema è inizialmente fermo, perché ci sia moto è necessario che il rapporto fra le
4
masse (per un certo angolo ) assuma valori diversi da quelli compressi nell’area evidenziata in
figura 1.d. Supponendo quindi che il corpo 1 si stia muovendo verso il basso, quindi che valga la
1
relazione m
sin
f S cos , si può scrivere il sistema di equazioni
m
2
m1x
F
m2ÿ
N
m1g
F
m 2 g sin
m 2 g cos
0
TR
0
0
dove valgono le relazioni
TR
ÿ
fRN
x
che sostituite nel sistema precedente portano a
F
m1x
F
m1g
0
m1m2g
f R cos
m 1 m 2 sin
m 2 g cos
g
m 1 m 2 m 1 m 2 sin
N
F
m 2 g sin
m 2 g cos
fRN
0
N
0
m2x
1
x
f R cos
m1
m2
Nel caso in cui il corpo 2 si stia muovendo verso l’alto, ovvero che valga la disequazione
sin
f S cos , il verso della forza di attrito è invertito e il sistema di equazioni vale
m1x
F
m2ÿ
m 2 g cos
N
m 2 g sin
F
0
m1g
TR
0
0
Con le debite sostituzioni si giunge a
m1x
m2x
N
F
F
m1g
m1m2g
f R cos
m 1 m 2 sin
m 2 g cos
g
m 1 m 2 m 1 m 2 sin
1
m 2 g sin
m 2 g cos
F
0
0
fRN
0
N
x
f R cos
5
Esercizio n.2
Calcolare l’accelerazione del disco di raggio R mostrato in figura, posto in un piano verticale e
inizialmente fermo, considerando la presenza di attrito volvente di coefficiente f v . Il coefficiente di
attrito statico è pari a f S , quello di attrito radente è pari a f R .
F
Figura 2.a
Analisi cinematica del sistema
Il sistema mostrato in figura presenta differenti gradi di libertà a seconda del tipo di moto. Se in
ogni istante la velocità relativa tra la superficie e il punto di contatto del disco è nulla il moto è di
puro rotolamento, quindi il sistema ha un grado di libertà. Questa condizione, nel nostro caso, si
verifica quando T f S N. Altrimenti T R f R N il sistema presenta due gradi di libertà (la
posizione del baricentro del disco e la sua posizione angolare) e il moto è detto di rotolamento con
strisciamento.
Nel caso in cui il moto sia di puro rotolamento è possibile scrivere una relazione che leghi le
variabili x e (vedi figura 2.b)
x
R,
x
R
.
θ, ω, ω
. ..
x, x, x
Figura 2.b
Equazioni della dinamica
Evidenziando le forze agenti sul corpo (vedi figura 2.c) possiamo scrivere tre equazioni di
equilibrio dinamico
mx
N
I
T
mg
TR
F
0
0
Nu
0
6
dove, I è il momento d’inerzia baricentrico di un disco di massa m e raggio R, e u è la quantità
di cui risulta spostata, nella direzione di moto, la reazione del piano N a causa della presenza
u . La soluzione di questo sistema dipende dal tipo
dell’attrito volvente; il legame tra u e f v é f v
R
di moto del sistema.
..
Iθ
mg
..
mx
F
T
N
u
Figura 2.c
Nel caso di puro rotolamento valgono
T
x
fSN
R
quindi il sistema può essere riscritto come
m R
T
F
T
0
FI m 2 Rgu
I mR 2
mg
FR mgu
I mR 2
N
I
mg
TR
0
Nu
N
0
E’ quindi necessario verificare che il valore ottenuto di T sia inferiore a f S N. Il momento di
inerzia di un disco vale 1 mR 2 , di conseguenza
2
1 mR 2 F m 2 Rgu
2
3 mR 2
2
f S mg
F
mg 3f S
2u
R
Nel caso in cui la forza F sia maggiore di questo valore il disco rotola con strisciamento, per
cui il sistema ha due gradi di libertà e vale la relazione
TR
fRN
e la relazione x
R non è più valida. Il sistema di equazioni di equilibrio dinamico è
7
N
mx
fRN
F
0
N
mg
0
x
I
f R NR
Nu
0
mg
F
m fRg
f R u
mg R
I
8
Esercizio n.3
Calcolare l’accelerazione del sistema inizialmente fermo mostrato in figura 3.a. Si consideri la
presenza di attrito tra il piano inclinato e il corpo 2 di coefficienti f R e f S . I diametri delle due
pulegge solidali sulle quali si avvolgono le funi inestensibili sono 2R 1 (per la puleggia più grande)
e 2R 2 (per la puleggia più piccola). Si considerino i corpi 1 e 2 di masse, rispettivamente m 1 e m 2 ,
mentre le due puleggie dotate di momento d’inerzia complessivo pari a I. Il sistema giace in un
piano verticale. Si supponga che il corpo 1 cominci a muoversi verso il basso per effetto delle forze
applicate.
3
2
α
1
Figura 3.a
Analisi cinematica del sistema
Il sistema è formato da tre corpi, collegati tra loro da funi inestensibili. Il corpo 1 è sospeso
mediante una fune che si avvolge sulla circonferenza esterna di raggio R 1 della puleggia, la quale è
incernierata a terra. Il corpo 2 è anch’esso collegato alla puleggia (sulla circonferenza interna di
raggio R 2 però) mediante fune. Il corpo 2 è appoggiato ad un piano inclinato di angolo che
presenta attrito (coefficienti f R e f S ).
.
θ, ω, ω
3
. ..
y, y, y
. ..
x, x, x
2
1
Figura 3.b
La posizione dei corpi può essere descritta mediante le coordinate mostrate in figura 3.b. Il
sistema presenta un grado di libertà, quindi è possibile trovare due equazioni che consentano di
esprimere due coordinate in funzione della terza. Le suddette relazioni sono, utilizzando come
9
variabile indipendente,
x
y
R1
R2
x
ÿ
R1
R2
Equazioni della dinamica
A differenza degli esercizi precedenti, non verrà utilizzato il principio di d’Alembert per la
risoluzione ma verranno scritte le equazioni della dinamica:
ma
I
Fdt
Mdt
dove I è il momento d’inerzia del corpo e M è il momento di una forza rispetto al baricentro del
corpo. Evidenziando le forze agenti su ogni singolo corpo (vedi figura 3.c) si possono scrivere le
equazioni di conservazione
m1x
m1g
m2ÿ
N
I
F2
m 2 g sin
m 2 g cos
F1
F1 R 1
TR
0
F2 R 2
dove si è supposto che il corpo 2 stia accelerando verso la direzione positiva dell’asse y.
F1
3
N
F2
1
2
F2
m2 gsinα
T
m2 gcosα
m1 g
F1
Figura 3.c
Supponendo movimento quindi la relazione che lega forza di attrito e reazione normale è
TR
fRN
Sostituendo le relazioni cinematiche e la relazione tra T R e N si ottiene
10
m1R1
m1g
m2R2
F2
F1
m 2 g sin
fRN
N
m 2 g cos
0
I
F1 R 1
F2 R 2
F1
m1 g
F2
R1
g sin
m2 R2
f R cos
N
m 2 g cos
m R m 2 R 2 sin
f R cos
g 1 1
2
I m 1 R 1 m 2 R 22
Di conseguenza le accelerazioni dei corpi 1 e 2 possono essere calcolate come
x
R1
m 2 R 2 sin
f R cos
R1g
2
I m 1 R 1 m 2 R 22
m 1 R 1 m 2 R 2 sin
f R cos
R2g
2
I m 1 R 1 m 2 R 22
m1R1
ÿ
R2
11