Biodesigner: nuovo professionista nella progettazione di sistemi bio-robotici
arch. Marita Canina
Laboratorio di Robotica, Dipartimento di Meccanica, Politecnico di Milano
Via Bonardi, 9 - 20133 Milano Tel.: +39-2-2399.4847; Fax: +39-2-70638377
email [email protected]
La progettazione corretta di un oggetto protesico, necessita di una serie di analisi atte a
definire le forme, i materiali e le modalità d’uso dell’oggetto stesso, affinché quest’ultimo
risulti essere veramente progettato e realizzato a misura d’uomo. Che cosa significa per un
biodesigner progettare un dispositivo bio-robotico? E come può procedere? Progettare protesi
per questo professionista porta ad intravedere un cambiamento nei confronti della risposta ad
alcuni desideri. Nella cultura contemporanea, infatti, vengono poste domande che non si
limitano solamente alla realizzazione di prestazioni funzionali, ma che chiedono di soddisfare
esigenze di tipo estetico, comunicativo, emozionale, sconosciute alla cultura del progetto
tradizionale. Sono molti gli esperti che oggi hanno constatato una trasformazione della figura
del designer1. Da alcuni anni, come è avvenuto per altre discipline, si è evidenziata la
necessità della nascita di una specializzazione del design orientata verso il campo medico.
Il designer che progetta in questa situazione deve possedere le capacità per comunicare con
linguaggi molto diversi fra loro, infatti, per risolvere problemi complessi come quelli legati
alla ideazione di prodotti ad elevato livello di innovazione tecnologica è necessario una
equipe multidisciplinare che collabora sinergicamente in tutte le fasi del progetto.
Il biodesign utilizza metodologie proprie del design per cercare di risolvere quelli che sono i
problemi medico-biologici, affiancando un’équipe di specialisti nei vari settori.
L’approccio metodologico per la risoluzione dei problemi posti è simile a quello della
bioingegneria, naturalmente gli obiettivi sono differenti in quanto quest’ultima è indirizzata
maggiormente agli aspetti tecnologici. Il biodesign non è semplicemente il design applicato
alla medicina, ma costituisce una nuova disciplina in quanto il concetto di interdisciplinarietà,
di stretta collaborazione tra due saperi, quello del design e quello delle scienze medico
biologiche, è parte integrante della sua stessa definizione.
La continua evoluzione tecnologica rende possibile soddisfare esigenze sempre più
complesse. Il biodesigner si trova a progettare, in questa realtà estremamente complessa,
perché ciò possa verificarsi deve riuscire a pianificare il suo intervento, chiarendo qual è la
sua funzione, il suo compito. Designer é colui che si inserisce in una realtà complessa, che la
affronta globalmente, in tutti i suoi aspetti tenendo come costante punto di riferimento la
qualità della vita per l’uomo. Da queste affermazioni deduciamo che uno dei compiti più
importanti del biodesign nella progettazione di dispositivi bio-robotici é quello di organizzare
la complessità2 esistente con la quale egli si confronta.
Metodologia progettuale del biodesigner
Il problema fondamentale è quello di risolvere metodologicamente la concretizzazione di
un’idea fino a farla diventare un prodotto da immettere sul mercato.
Si cercherà di mettere in evidenza l’importanza e l’interesse che scaturisce dall’individuare
metodi di ricerca non legati alla specializzazione della disciplina, ma alla risoluzione del
problema. In accordo con quanto sostiene Vernadsky si opta per un passaggio dalle
1
Tra gli esperti i relatori del Convegno “Il ruolo del design nel rilancio delle economie occidentali”, organizzato
dalla Scuola di Specializzazione in disegno industriale di Firenze e presieduto da Gillo Dorfles ed Eduardo
Vittoria, Giuliano Bianchi, Luigi Bistagnino, Gilberto Coretti, Massimo D’Alessandro, Giorgio De Ferrari,
Nadio Delai, Enzo Frateili, Giuseppe Furlanis, Ernesto Gismondi, Mario Maioli, Tomàs Maldonado, Ezio
Manzini, Pier Luigi Molinari, Roberto Segoni, Nicola Sinopoli, Pierluigi Spadolini, Francesco Trabucco.
2
Complessità che é dovuta alle diverse problematiche che le varie discipline afferenti a questo settore portano.
specializzazioni delle discipline alle specializzazioni dei problemi. Secondo lo studioso non
esistono discipline ma solo problemi3.
La capacità di individuare e descrivere un problema è considerata, di per sé, come un fatto
creativo, ed è indubbiamente il primo passo necessario per impostare le ipotesi che
sostanziano un’attività di ricerca. C’è la volontà di studiare un comune strumento di indagine
capace di colmare una lacuna di progettualità con metodologie che introducano sistemi di
analisi e generazione di idee, propri e caratteristici della disciplina del disegno industriale, ma
interpretabili da diverse figure professionali. La ricerca progettuale è il percorso più idoneo
per stabilire struttura e modalità di un trasferimento metodologico da un dominio di
conoscenza consolidato ad uno nuovo ed inesplorato.
Il processo progettuale in quanto tale, con le sue fasi analitiche e sintetiche, può avere la
peculiarità di identificare nuovi potenziali ambiti di ricerca, di coinvolgere competenze
multidisciplinari, e grazie al carattere interdisciplinare della ricerca di design, può essere
assunto come luogo teorico della riflessione sul progetto.
Dall’esperienza acquisita presso il Laboratorio di Robotica del Politecnico di Milano emerge
la necessità di affrontare il processo di progettazione dei dispositivi bio-robotici in modo
globale e multidisciplinare. Questa sollecitazione dovuta alla compresenza di problematiche
molto diverse, sottolinea di fatto una mancanza avvertita soprattutto a livello di
coordinamento del processo di sviluppo.
Il tradizionale iter di sviluppo di un dispositivo bio-robotico avviene con una successione di
fasi del tutto simile a quella dei prodotti industriali. Il designer, che collabora con gli altri
specialisti del settore, ingegneri, tecnici, medici e con chi progetta di mettere sul mercato un
nuovo dispositivo medico, soprattutto nel settore dei dispositivi ad alta tecnologia, si trova ad
intraprendere un processo in genere lungo e costoso, in termini cognitivi, composto da
passaggi successivi. Il biodesign si colloca, in quanto disciplina di integrazione,
all’intersezione di numerose aree di attività e si pone anche come potenziale elemento
ordinatore, che attraversa il network di progetto. Nel processo progettuale, Friedman colloca
il designer non una struttura con un centro, bensì in uno dei nodi della rete di competenze e
sistemi che generano un prodotto.
Il settore di applicazione
L’applicazione di micro (MEMS) e nanotecnologie (NEMS) nel campo dei dispositivi biorobotici, e anche nel settore protesico, è l’aspetto maggiormente innovativo del quale il
biodesigner si occupa. Il sistema MEMS è un chip di dimensioni molto piccole, che contiene
il sensore e parte dell’alimentazione. L’utilizzo di questi
microsensori ha portato ad una fase evoluta della ricerca in cui i
dispositivi diventano sempre più piccoli. Mentre la
nanotecnologia che è ai suoi primi passi possiede
potenzialmente le caratteristiche per produrre profondi
cambiamenti nel futuro.
La bio-robotica cresce e avanza in direzioni diverse sviluppando
dispositivi sofisticati da una parte e meccanismi super utili
dall’altra, inseguendo sempre lo stesso fine che è quello di
migliorare la qualità di vita delle persone. Naturalmente il
settore della medicina non è l’unico in cui si possono applicare i
Fig. 1: Uomo: centro della ricerca
benefici di questa nuova tecnologia, ma è sicuramente quello in
cui si spera di ottenere i risultati migliori.
3
Presentato dall’Arch. F. Costa durante un incontro del corso di Metodologie della Ricerca della Scuola di
Dottorato del Politecnico di Milano
Definizione degli obiettivi metodologici
Uno degli obiettivi principali di questa nuova figura professionale, il biodesigner, è nel
contribuire alla definizione di approccio progettuale nuovo per lo sviluppo di una ricerca che
affianchi alla produzione di microsensori e nanosensori intelligenti l’ideazione di dispositivi
focalizzati per la cura della salute e per il benessere.
Un designer ricerca prima di tutto per capire, sostiene Frascara, ma egli velocemente per
necessità trasforma questo sapere in indicazioni per procedere: la ricerca che egli conduce dà
supporto, riferimenti e confini alla sua conoscenza, ma non è da sola sufficiente a risolvere
tutti i problemi di progetto, per cui è necessaria l’esperienza. L’attività collegata
all’esperienza è fatta di pratica e teoria e conduce all’acquisizione di più sofisticati e
consapevoli strumenti decisionali. Il designer interagisce con queste fasi di progetto
avvalendosi di quelle abilità che lo caratterizzano, fra cui: l’immaginazione, la capacità di
visualizzazione tridimensionale di forme e rapporti fra oggetti, la versatilità, la capacità di
comunicare attraverso disegni e parole e di sintetizzare. L’identificazione del dispositivo che
si intende realizzare deriva dalla conoscenza della realtà del settore e dell’area di mercato in
cui lo si immette. Basandosi su questo tipo di indicazione si individuano strategie che
raggiungano un approccio estremamente efficace nella applicazione di tecnologie innovative
per la realizzazione di dispositivi bio-robotici al fine ottenere il miglioramento della qualità
della vita. La razionalizzazione delle risorse disponibili e la loro organizzazione, si
accompagnano ad una attenta e dettagliata analisi delle aree di intervento e, all’interno delle
stesse, dei singoli problemi progettuali alle quali più concretamente è possibile rispondere
attraverso strumenti applicativi. Un approccio metodologico corretto consiste in un analisi
strutturata del problema di interesse, che ne identifichi le complesse modalità di
manifestazione attraverso una rappresentazione a diagrammi a blocchi. La rappresentazione
grafica ottenuta consente di individuare i dettagli e le grandezze coinvolte.
Si ritiene utile precisare che la fase di indagine sulle problematiche non è conseguente bensì
contestuale allo studio e alla impostazione delle strategie di ricerca. Infatti, la definizione
delle aree di intervento e della potenziale efficacia degli interventi stessi derivano da
considerazioni basate sull’indagine condotta con questo strumento. Tuttavia, da quanto
emerge dalla cooperazione con i medici, non esiste attualmente una efficiente attività di
scambio e cooperazione tra il mondo della medicina, che rappresenta le esigenze da
soddisfare, e il mondo della tecnica e della tecnologia, che rappresenta le conoscenze
applicative e può offrire le capacità di analisi orientate alla realizzazione di dispositivi. Il
tentativo del biodesigner che lavora in equipe muldidisciplinare è proprio quello di costruire
un comune strumento di indagine che permetta la costituzione di un linguaggio condivisibile
con il quale impostare la fase progettuale.
Strumenti per l’interazione delle informazioni e la generazione di idee
La creazione di strumenti di analisi, che descrivano i requisiti progettuali secondo modalità
orientate alla costruzione di dispositivi innovativi, permette di identificare le potenzialità
applicative realizzabili. Soltanto l’interazione delle reciproche competenze tra medici,
ingegneri, designer può permettere di orientare le esigenze nelle direzioni consentite dalla
tecnologia attuale e soprattutto quella prossima futura, trovando stimolo nella ricerca e
innovazione per applicazioni realmente indispensabili ed escludendo linee di sviluppo non
corrispondenti a necessità reali. La natura delle discipline del progetto è quella di essere
orientata ai problemi dice V. Margolin4 e il valore aggiunto dell’approccio metodologico
delineato è nel coordinare diversi modelli di indagine che derivano da diverse discipline. In
4
Margolin, Victor, “The Product Milieu and Social Action”, in Discovering Design, Explorations in Design
Studies, The University of Chicago Press, Chicago and London.
tale contesto il ruolo della ricerca di design è connettere i diversi modelli derivanti dalle varie
discipline. La multidisciplinarietà, come manifesta cooperazione, si esplica nel dettaglio a
quasi tutti i livelli di attività progettuale di ricerca e l’interazione permanente con
informazioni mediche orientate all’applicazione costituisce un elemento di controllo e un
contributo formativo continuo riguardo campi applicativi di elevata complessità, soprattutto
dal punto di vista umano.
La procedura di interscambio di nozioni si concretizza in approfondimenti specifici riguardo
le problematiche scelte nella ricerca, le quali vengono dettagliate attraverso vari strumenti
(schede, reports, …) e messe a punto in modo da omologare lo scambio di informazioni in un
contesto funzionale alla individuazione delle caratteristiche più interessanti per lo sviluppo
del progetto. Nell’approccio metodologico impostato la fase di collaborazione più intensa col
mondo della medicina si attua durante la maggior parte dei passi progettuali necessari alla
realizzazione di un prototipo. Espandendo ed analizzando la fase preparatoria, si evidenziano
momenti ben delineati che, nonostante la naturale compenetrazione di varie istanze
progettuali in qualsiasi pianificazione, si configurano come sottofasi caratterizzate da un
decisivo contributo nell’impostazione del progetto.
La prima di esse risulta necessaria, e spesso gravosa, al fine di acquisire competenze in campi
lontani dalla comune realtà progettuale. L’obiettivo delle ricerche impone di colmare qualsiasi
lacuna nella formazione riguardo il tema trattato, questo è giustificato dalla necessità di
dominare la tematica in modo completo per procedere alla impostazione delle fasi più
tecniche: ad una serie di input precisi, dettagliati e solidi risulta più agevole far seguire scelte
corrette. La seconda sottofase implica il completamento dell’analisi dello stato dell’arte. Da
questo tipo di informazione si ricavano i requisiti progettuali di utilità per il dispositivo. E’
proprio in questa fase che scaturisce quella generazione di idee legate alle competenze
acquisite e alle interazioni multidisciplinare rese possibili dalla costituzione di uno strumento
comune di indagine. Ciò che spetta al progettista è individuare il tipo di tecnologia adeguata
atta a soddisfare le esigenze richieste. Pensare ad un prodotto la cui tecnologia ipotizzata è
innovativa e non è ancora in uso, comporta naturalmente un approccio rivolto ad una
elaborata e impegnativa ricerca. Verrà definito un organigramma del dell’équipe
(interdisciplinarietà) in base alle competenze tecniche, nominando un coordinatore, che sulle
basi di quanto detto finora dovrà essere il designer. La terza ed ultima fase del ciclo
preparatorio propone la risoluzione delle funzioni proposte nella costruzione di un dispositivo
fisico. Il prototipo così ipotizzato deve garantire non solo la compatibilità con le
caratteristiche individuate ma anche verificare una serie di condizioni tecniche necessarie al
suo corretto funzionamento.
Una esperienza progettuale: protesi d’arto inferiore a controllo elettronico
Tra le attività di ricerca bio-robotica in corso nel Laboratorio di Robotica, quella in
collaborazione con il Centro Protesi INAIL, è sicuramente interessante ed esplicativa per
quanto detto in precedenza. Per il raggiungimento degli obiettivi di questa ricerca,
caratterizzata da un elevato grado di complessità, è fondamentale, l’interdisciplinarietà intesa
come cooperazione tra diverse figure professionali quali l’ingegnere, il designer, il medico. Il
team di ricerca del Laboratorio di Robotica si avvale, infatti, oltre che della collaborazione di
ricercatori provenienti da diverse discipline, di una stretta e proficua collaborazione con gli
esperti del Centro protesi INAIL di Budrio e della STMicroelectronics. Il progetto di un
nuovo prototipo di protesi d’arto inferiore a controllo elettronico, adotta soluzioni
meccaniche e informatico-elettroniche innovative, prendendo in considerazione le esigenze di
deambulazione del paziente, permettendo la modifica del tipo di passo in modo semplice ed
immediato. Il prototipo realizzato prevede l’accumulo dell’energia, spesa dal paziente durante
la flessione del ginocchio nella fase di stance (appoggio del piede a terra), mediante una molla
a forza costante e la variazione e il controllo del passo tramite l’utilizzo di un freno meccanico
a tamburo. Grande importanza è attribuita al design del sistema e alla ricerca dei componenti,
che hanno caratteristiche appropriate alle funzionalità richieste alla protesi.
Per fornire al paziente assoluta stabilità durante il passo, sostenendone il peso e agevolandolo
nella deambulazione è necessario regolare la rotazione del ginocchio, arrivando anche ad
impedirla in particolari condizioni. La meccanica del prototipo risulta essere semplice e di
facile assemblaggio, molto leggero e vanta, rispetto ad
altre protesi a tecnologia avanzata attualmente in
commercio, il minor numero di parti assemblate.
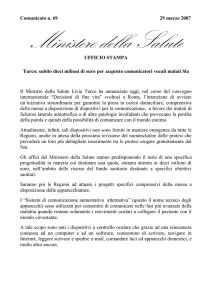
Le due principali parti meccaniche, il corpo femore e
il corpo tibia, vengono accoppiate attraverso due
cilindri uno esterno e l’altro interno, le cui
funzionalità sono agire da cerniera per il ginocchio e
permettere l’ancoraggio del freno. Il sistema di
accumulo e restituzione di energia, costituito da una
molla a forza costante, è assolutamente nuovo e
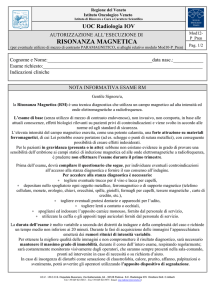
Fig 2: Prove del prototipo
consente di intervenire con estrema semplicità sulle
caratteristiche della protesi. Esso permette il raddrizzamento della protesi durante la fase di
swing (piede in volo) e, con ginocchio a 90°, alla gamba di rimanere piegata sotto il proprio
peso.
Per il controllo della protesi si utilizza un freno meccanico a tamburo il quale fornisce
un’azione frenante sufficiente a garantentire il bloccaggio in sicurezza in condizioni di
emergenza e la regolazione del passo. Per la realizzazione del freno meccanico
necessariamente si è curato aspetti costruttivi e funzionali di notevole rilevanza, quali la
leggerezza e l‘amplificazione della forza.
Particolare attenzione è rivolta alle diverse tipologie di sensori grazie ai quali il ginocchio
a controllo elettronico è in grado di ottenere una conoscenza specifica dello stato dinamico in
cui si trova in tempo reale. Il contributo delle micro tecnologie si esplica nella possibilità di
integrare diversi sensori e di offrire sistemi completi asserviti all’ottenimento di obiettivi che
rispondano alle specifiche caratteristiche funzionali, alle esigenze di miniaturizzazione e di
confort. Una serie di sensori tra i quali due ponti estensimetrici, un sensore di tipo
potenziometrico e un accelerometro, rilevano: l’angolo d’inclinazione del ginocchio; la
velocità dell’oscillazione; la forza assiale agente sulla tibia; il momento flettente agente sulla
tibia; l’accelerazione del femore. I segnali provenienti da tali sensori vengono acquisiti da un
circuito
elettronico
ed
elaborati
da
un
microprocessore della STMicroelectronics. La
calibrazione eseguita su ogni paziente, consente di
adattare la protesi automaticamente ed in tempo reale
alle differenti velocità di moto, alle diverse condizioni
di utilizzo ed alle eventuali variazioni di peso della
persona.
Obiettivo del sistema elettronico ed informatico per il
controllo in tempo reale della protesi è di adattarne il
comportamento alle varie condizioni di passo del
paziente,
tramite
l’azionamento
del
freno,
Fig 3: Acquisizione segnali dai sensori
rispondendo alle esigenze di equilibrio e di mobilità.
La lettura dei segnali rilevati dai sensori integrati nella meccanica dell’arto artificiale, è
fondamentale per dare una corretta interpretazione della situazione in essere e
conseguentemente agire in modo appropriato e rispondente alle relative esigenze.
Nella realizzazione della board elettronica compatta e
ad alte prestazioni, sono state valutate e prese in
considerazione le caratteristiche dei diversi sensori,
integrando nel circuito elettrico ed elettronico
componenti adeguati ad una lettura affidabile,
completa e veloce dei segnali. L’elevato grado di
sensorizzazione del ginocchio ne richiede una
periodica taratura che può essere eseguita solo dal
personale specializzato del Centro Protesi Inail. Si è
sviluppato un sistema che permette di effettuare una
Fig 4: Acquisizione segnali dai sensori
calibrazione a distanza del ginocchio, consentendo al
paziente di rimanere nella propria abitazione mentre i
tecnici effettuano la taratura. Il sistema di telecontrollo realizzato, è molto semplice ed
estremamente versatile, consente di semplificare il realizzazione del software delegato alla
trasmissione dei dati tra la gamba e il computer di controllo. L’intero sistema presenta il
massimo della portabilità unitamente al minimo costo. Per favorire la massima libertà di
movimento dell’utente si può utilizzare la telefonia cellulare GPRS o PDA e la tecnologia
bluetooth.
Il prototipo realizzato è stato testato presso il centro protesi INAIL, sono state eseguite, a tale
scopo, numerose prove sia di resistenza meccanica che di acquisizione dati.
Conclusioni
Il metodo implementato ed applicato non solo nel progetto di protesi d’arto ma in tutti i
recenti argomenti di ricerca sviluppati presso il Laboratorio di Robotica, ha come obiettivo lo
sviluppo e l’ottimizzazione delle fasi di indagine e di validazione, nelle quali risiedono i
concreti elementi di innovazione metodologica. L’interdisciplinarietà è necessaria e
fondamentale per sviluppare prodotti multiuso ad alto valore aggiunto destinati al benessere
ed alla salute. L’adozione dei risultati della ricerche in nanotecnologie e microtecnologie per
lo sviluppo e la creazione di nuovi prodotti crea molto interesse.
La rivoluzione nanotecnologica sta aprendo nuovi orizzonti in medicina. Il futuro della
medicina è nelle micro e nano macchine: strumenti di dimensioni infinitamente ridotte, capaci
di perlustrare all’interno dell’organismo, diagnosticare e curare contemporaneamente.
L’innovazione consiste nel definire specifiche per lo sviluppo di nuovi microsensori basati su
materiali innovativi integrabili nei vestiti, nell’ambiente, nei dispositivi quotidiani.
L’intervento del biodesigner può essere letto come elaborazione di regole e linee guida nella
progettazione, di consigli per una impostazione adeguata ad un corretto sviluppo di questo
campo. Ciò porterebbe all’integrazione di prescrizioni precise nella progettazione e nella
realizzazione fin dall’inizio del processo progettuale, con un approccio globale e coerente al
problema della progettazione.
Approfondimento
http://robotica.mecc.polimi.it
http://www.progettoprodotto.polimi.it
http://www.inail.it
http://www.healthtech.com Sito del BioMems and Biomedical Nanotech Center, Berkeley,
Columbus Ohio, diretto dal prof. M. Ferrari
http://www.foresight.org Il sito del Foresight Institut
http://www.nano.gov Sito ufficiale del governo Usa sulla ricerca nel campo delle
nanotecnologie