1
Oscillazioni
armoniche ed anarmoniche
Giacomo Torzo§ e Barbara Pecori*
Dipartimento di Fisica, Università di Padova
*
Dipartimento di Fisica, Università di Bologna
§
Introduzione
Uno degli argomenti in didattica della fisica che possono trarre un grande vantaggio dall'essere
studiati con sistemi di acquisizione on-line (e in particolare con il sistema CBL e calcolatrici
grafiche) è la meccanica dei moti oscillatori.
Questo perché in un moto oscillatorio è assai importante cogliere l'evoluzione temporale del
fenomeno, e il poter analizzare i grafici di posizione, velocità e accelerazione verso il tempo spesso
permette una valutazione immediata delle caratteristiche essenziali del particolare tipo di
oscillazione.
Anche l'analisi dei dati sperimentali in rappresentazioni grafiche meno diffuse in ambito scolastico
(velocità/posizione, accelerazione/posizione, forza/accelerazione, forza/posizione…) può offrire
spunti preziosi per approfondire nello studente la comprensione del fenomeno in esame. Il sistema
sensore-interfaccia-elaboratore consente cioè di estendere le potenzialità dell'occhio e della
memoria dello studente che osserva il fenomeno, offrendo, da un lato una registrazione permanente
dei dati sperimentali per una successiva rielaborazione (anche lontano dal laboratorio, ove il
fenomeno non è più disponibile), dall'altro la possibilità di caratterizzare immediatamente in modo
qualitativo il sistema in esame, individuando dalla forma del grafico relazioni interessanti tra le
variabili caratteristiche del fenomeno. Infine la disponibilità dei dati sperimentali nella loro
interezza consente di procedere successivamente ad una analisi quantitativa e non più solo
qualitativa. Per illustrare le potenzialità di una analisi qualitativa dei dati, prenderemo rapidamente
in esame tre sistemi oscillanti: due fanno parte del normale programma dei corsi introduttivi di
meccanica (oscillatore massa-molla e pendolo) mentre il terzo (la macchina di Atwood con una
massa in acqua) è piuttosto inusuale ma si presta bene ad illustrare la transizione dal comportamento
anarmonico a quello armonico, un aspetto che nel tradizionale laboratorio viene di solito trascurato.
Nel caso dell'oscillatore massa-molla, se la molla obbedisce alla legge di Hooke, il sistema è sempre
rigorosamente armonico (forza di richiamo proporzionale allo spostamento), nel caso
dell'oscillatore di Atwood il moto anarmonico diventa armonico alle piccole ampiezze (la forza di
richiamo data dalla spinta di Archimede e dal campo gravitazionale, passa da un valore costante ad
uno proporzionale allo spostamento quando il corpo resta sempre parzialmente immerso), mentre
nel caso del pendolo (oscillatore intrinsecamente anarmonico) gli effetti di anarmonicità possono
essere trascurati a piccole ampiezze.
Per mostrare invece come sia possibile condurre uno studio quantitativo di un moto oscillatorio
descriveremo le fasi dell’ analisi del moto di un oscillatore che, anche se ben noto ad insegnanti e
studenti, raramente diventa oggetto di studio nella scuola (l'altalena nelle sue due configurazioni
elementari).
In appendice infine riportiamo una rassegna di vari moti oscillatori (pallina che rimbalza, carrello e
molla su piano inclinato, sfera su doppio piano inclinato, ruota di Maxwell e yo-yo) il cui studio
comparato permette di evidenziare aspetti comuni a fenomeni apparentemente molto diversi, e
differenze importanti in fenomeni apparentemente assai simili .
2
Gli elementi del sistema di acquisizione utilizzato
3
Un esempio di confronto qualitativo fra oscillatori
Posizione
Velocità
Massa-molla
Atwood
Pendolo
I grafici x(t) si assomigliano abbastanza: a prima vista sembrano tutti delle sinusoidi più o meno
smorzate.
Dai grafici v(t) risulta invece evidente la differenza fra i tre oscillatori, e la differenza si nota ancor
più nei grafici a(t).
Per l'oscillatore armonico (massa-molla) l'andamento della velocità segue quello della posizione,
solo con uno sfasamento di 90°, invece per l'oscillatore di Atwood il grafico della velocità, a grandi
ampiezze, è composto da segmenti rettilinei, rivelando subito che in ciascun tratto il moto è
uniformemente accelerato, con accelerazione che cambia segno ogni semiperiodo, mentre per
piccole oscillazioni assomiglia a quello della molla. Anche l'oscillazione a grande ampiezza di un
pendolo è tutt'altro che sinusoidale: non lo si nota nel grafico x(t), ma lo si vede bene in quello di
v(t).
E’ evidente che proprio la disponibilità dei dati sperimentali nella loro interezza, e non solo in
particolari istanti (ad esempio quelli relativi al passaggio attraverso traguardi, come nel laboratorio
tradizionale) consente questa analisi (qualitativa ma importante) a colpo d'occhio.
E’ possibile quindi, a partire da questa prima analisi, mettere in evidenza come l’approssimazione
armonica a piccole ampiezze sia, da un lato estremamente utile per semplificare la trattazione
matematica, ma dall’altro inadeguata a spiegare dettagliatamente il comportamento di alcuni
4
fenomeni.
La caratteristica di armonicità implica l'isocronismo. Una analisi quantitativa dei grafici permette di
realizzare facilmente uno studio dell’andamento del periodo in funzione dell'ampiezza.
Questo tipo di approccio permette inoltre di variare in sequenza diversi parametri nell'esperimento
allestito e di osservare immediatamente le conseguenze nel moto risultante.
Successivamente si può altrettanto agevolmente controllare l'accordo o il disaccordo tra dati
sperimentali e previsioni formulate sulla base di modelli fisici del fenomeno studiato, ed
eventualmente su questa base rivedere il modello usato.
Un esempio di studio quantitativo: il moto dell’altalena
Il termine altalena in italiano viene usato per oggetti diversi: c'è l'altalena a fune (strutturalmente un
pendolo) c'è l'altalena a barra incernierata ad un fulcro fisso (quella che spesso si trova nel parcogiochi) e poi ci sono le altalene "artigianali" che chiunque si può costruire con una barra poggiata su
un sostegno fisso.
Chi ha avuto occasione di giocare con una altalena fatta di un'asse in bilico su un sostegno fisso può
aver notato che l'altalena "funziona meglio" quando il sostegno è piatto (ad esempio un muro basso
di una casa in costruzione) ed è invece meno divertente se il fulcro adoperato è tondo e sottile
(come ad esempio la barra di una ringhiera), nel qual caso l'altalena si comporta in modo simile a
quella del parco-giochi.
Questo diverso comportamento si può spiegare se si studia in dettaglio la dinamica dei due sistemi,
che si rivelano essere diversi in modo sostanziale.
altalena incernierata in un punto
altalena a fulcro piatto
altalena a fulcro tondo
Usando il sistema di acquisizione on line per studiare il moto di due modelli in scala ridotta
rispettivamente della altalena su sostegno piatto e della altalena su sostegno tondo vedremo che, per
piccole oscillazioni, il primo è un moto anarmonico e il secondo è un moto armonico.
5
Descrizione delle fasi dello studio
Studiamo innanzitutto il moto di una sbarra che oscilla su supporto piatto .
Lo studio può iniziare con una osservazione qualitativa dei grafici che si ottengono rilevando la
posizione dell’estremo della sbarra in funzione del tempo z(t) e delle due derivate successive v(t) e
a(t).
Un esempio di dati acquisiti (L=50cm, m=120g, d=2cm) è il seguente:
Dai grafici v(t) e a(t) possiamo subito vedere che il moto non è armonico, ma presumibilmente a
forza costante.
Per avere ulteriori informazioni possiamo provare a variare alcuni parametri.
Se variamo la massa a parità di lunghezza (ad esempio usando una barra doppia) otteniamo grafici
praticamente identici che indicano l’indipendenza delle caratteristiche del moto dalla massa della
sbarra.
Caricando invece la sbarra agli estremi (con due masse uguali M=0.5 kg) possiamo vedere una netta
variazione del periodo medio di oscillazione e del valore dell’accelerazione, pur rimanendo
invariata la forma dei grafici che si ottengono. Questo indica che la distribuzione della massa (cioè
il momento di inerzia) è un parametro importante nel determinare la dinamica del sistema.
Per passare ad uno studio quantitativo è necessario formulare un modello che permetta di
esprimere analiticamente la dipendenza di una variabile caratteristica del moto (ad esempio
l’accelerazione o il periodo) dai parametri individuati come significativi.
Un modo per schematizzare la dinamica del sistema è di considerare la barra come un corpo rigido
che compie in successione movimenti di rotazione in senso orario e antiorario attorno a due assi
fissi (i due spigoli del blocco su cui la sbarra è poggiata all'equilibrio). Allora basta prendere in
considerazione il moto del baricentro, il momento di inerzia I della barra e le forze agenti. Nel
momento in cui si lascia libero l'estremo della barra il baricentro inizia a cadere sotto la spinta della
forza di gravità, ma resta vincolato alla distanza d/2 dallo spigolo di appoggio che funge da asse di
rotazione. L'equazione del moto è subito fornita dalla relazione I dω/dt=Γ , ove Γ =(d/2)mgcosϕ è il
momento torcente e ω a velocità angolare.
Se la barra è sufficientemente piatta il suo momento di inerzia rispetto all'asse orizzontale per il
baricentro è I0 = 2 ∫
L/2
0
x 2 µdx =mL2/12, ove µ=m/L è la massa per unità di lunghezza della barra. E il
6
momento di inerzia Ir rispetto ad un asse parallelo che dista r=d/2 dal baricentro è fornito dal
teorema di Steiner: Ir = I0+mr2. Con r=d/2 si ha I = (m/3)(L/2)2(1+3d2/L2).
Una schematizzazione della dinamica nell'approssimazione di piccoli angoli (e per L>>d) fornisce
per la componente verticale dell'accelerazione dell'estremo della barra il valore costante a=3gd/L.
Se la barra è caricata con due masse uguali M agli estremi, il momento torcente applicato al
baricentro, vale Γ =(d/2)(m+2M)gcosϕ. e il momento di inerzia diventa I={(m/3)(1+3d2/L2)+2M
(1+d2/L2)}(L/2)2
Nel caso sia M>>m e L>>d la componente verticale dell'accelerazione dell'estremo della barra a
piccoli angoli diventa a=gd/L.
Un primo controllo sperimentale del modello può essere effettuato confrontando l’accelerazione
della sola sbarra con quella della sbarra caricata agli estremi. I valori sperimentali indicano che
effettivamente in questo secondo caso l’accelerazione risulta ridotta di un terzo.
Un secondo controllo sperimentale può essere effettuato studiando l’andamento del periodo in
funzione dell’ampiezza. La previsione teorica è che, nei limiti della schematizzazione effettuata, sia
T ≈ 4 2 zL / 3gd e i dati sperimentali (ricavati misurando sul grafico i valori del periodo per diversi
valori dello spostamento) mostrano effettivamente un andamento del periodo direttamente
proporzionale a √z .
Il modello finora sviluppato prevede ovviamente che se d tende a zero il periodo T tende
all’infinito, condizione che corrisponde a quella dell’altalena incernierata al centro.
Che cosa succede invece se realizziamo una situazione con d=0 utilizzando un fulcro tondo ?
Riportiamo di seguito una acquisizione dei dati nel caso di una sbarra che oscilla su un supporto
tondo (L=50 cm, R=5cm, m=120 g):
In questo caso T non sembra dipendere dall'ampiezza. Inoltre se proviamo a variare alcuni
parametri possiamo vedere che:
il moto risulta indipendente dalla massa della sbarra;
il periodo diminuisce al crescere del raggio di curvatura del fulcro;
caricando la sbarra agli estremi il periodo aumenta.
7
R=10 cm m=120g M=0
R=10 cm m=120g M=1000g
E’ necessario quindi formulare un nuovo modello teorico, che dovrà tener conto del fatto che sia il
momento torcente sia il momento d’inerzia dipendono dall’angolo.
Lo spostamento del punto di appoggio (lungo la barra) in tal caso vale x=Rφ , e il momento della
forza agente sul baricentro è x mg cosφ, ove anche il braccio della forza x(φ) dipende dall’angolo, e
adesso anche il momento di inerzia è variabile: I dipende da x, e quindi da φ: I(x)=(m/12)L2+mx2
(dal teorema di Steiner).
La relazione teorica che, nell’approssimazione di piccoli angoli, lega accelerazione angolare α ad
angolo di inclinazione φ è: α≈ –12gR/L2φ: si riconoscerà la classica equazione del pendolo, con
periodo T=π L /√(3gR)
L’oscillazione con la barra appesantita agli estremi ha accelerazione angolare α≈ –4gR/L2 φ, ridotta
di un terzo rispetto al caso di barra scarica, e il periodo previsto per piccole oscillazioni diventa
T= π L /√(gR) ovvero maggiore di un fattore√3 rispetto all’altalena scarica.
I risultati sperimentali confermano questo modello: effettivamente abbiamo realizzato un moto
quasi armonico che per piccole oscillazioni si comporta come quello di un pendolo.
L’utilizzazione di un sistema di acquisizione semplice ma potente, come quello costituito da una
calcolatrice grafica interfacciata con un sensore di moto, ci ha permesso di condurre uno studio del
fenomeno non solo qualitativo ma anche quantitativo.
8
Appendice: I moti oscillatori nel laboratorio di fisica
In questa appendice riportiamo alcuni esempi di moti oscillatori di tipo meccanico (cioè nei quali le
forze considerate non rientrano nell’ambito tradizionale dell’elettromagnetismo) che possono essere
facilmente realizzati in un laboratorio didattico e studiati con un sistema di acquisizione on-line. Per
ciascuno di essi indicheremo il materiale occorrente, il procedimento di acquisizione dei dati e una
traccia dell’analisi dei dati sperimentali.
La maggioranza degli esempi che presentiamo sono moti intrinsecamente anarmonici, alcuni dei
quali possono essere considerati armonici in particolari condizioni. Infatti, contrariamente
all’impressione che si può ricavare dalla maggioranza dei testi scolastici di fisica, i moti oscillatori
che si presentano anche nella vita di tutti i giorni sono solo raramente moti armonici. Ciò è dovuto
al fatto che, data la presenza di un campo gravitazionale praticamente costante, la forza di richiamo
che genera la maggioranza dei moti oscillatori è la forza di gravità stessa o una sua componente
lungo una particolare direzione, quindi una forza costante e non dipendente dalla posizione. In
alcuni casi una dipendenza dalla posizione può realizzarsi per effetto della geometria del sistema
(come nel caso del moto circolare del pendolo) ma in tali casi la dipendenza della forza dalla
posizione non è lineare (dipendenza dal seno dell’angolo) e può essere approssimata al caso lineare
solo per piccoli spostamenti dalla posizione di equilibrio.
Un moto intrinsecamente armonico può essere generato solo in un sistema in cui la forza di
richiamo sia effettivamente linearmente dipendente dalla posizione del corpo che oscilla, come nel
caso di un corpo attaccato ad una molla lineare, dove la gravità svolge un ruolo solo nella
determinazione della posizione del punto di equilibrio.
Un caso particolare è quello della spinta di Archimede (che pure è legata alla presenza del campo
gravitazionale) che, dipendendo linearmente dal volume del corpo immerso, può generare una forza
proporzionale allo spostamento, e quindi un moto intrinsecamente armonico, purché il corpo che
oscilla immergendosi più o meno nel liquido abbia sezione costante (cilindro o parallelepipedo).
9
L'oscillatore verticale massa-molla.
Materiale necessario: Sensore di distanza (Sonar), sensore di forza, una serie di masse componibili
(m≈100g) con gancio, una molla (L≈10cm, k≈3N/m), morsetto per fissare il sensore di forza al
tavolo di lavoro.
Procedura suggerita:
Si appende la molla al sensore di forza, la massa alla molla, si azzerano i sensori all’equilibrio e si
avvia l'oscillazione. Con i valori suggeriti si ottiene una oscillazione con periodo di circa 1 secondo.
Conviene partire da una ampiezza di circa 10 cm (un terzo dell'allungamento della molla
all'equilibrio) e acquisire circa 150 punti con una frequenza di campionamento di 0.04 s.
Analisi dei dati ottenuti con l'oscillatore verticale massa-molla
I grafici x(t), v(t), a(t), f(t), hanno andamento chiaramente sinusoidale, come ci si può attendere da
un moto armonico. Si può mostrare nell'ambiente DataMatrix Editor come costruire funzioni
interpolanti le varie curve e discutere gli sfasamenti … Muovendo il cursore sul grafico si possono
eseguire misure del periodo ed osservare che non dipende dall'ampiezza, come ci si attende da un
oscillatore armonico (isocronismo). Il grafico f(x) risulta lineare, e dalla pendenza si può calcolare
la costante elastica della molla. Il grafico a(x) risulta lineare, e una volta nota la costante elastica, si
può ricavare dalla pendenza la massa inerziale mi di un corpo incognito.
Si può ripetere l'esperimento con una massa diversa e poi con una molla diversa (es. m=50g ,
k=1N/m) per evidenziare la dipendenza del periodo da √m/k
In ambiente DataMatrix Editor si possono costruire le colonne con i valori di energia potenziale
(gravitazionale, elastica) e cinetica. Grafici di queste grandezze calcolate (verso il tempo o verso la
posizione, consentono una approfondita discussione delle trasformazioni dell'energia: un grafico
dell'energia totale verso il tempo per una acquisizione lunga, o per una oscillazione volutamente
smorzata da un disco di cartone attaccato alla massa, permette di ricavare il coefficiente di
smorzamento. Oscillazioni a grande ampiezza possono mettere in evidenza che l'energia dissipata è
ceduta a fiotti, in corrispondenza dei picchi di velocità (attrito viscoso).
10
Il pendolo.
Materiale necessario: Sonar, un ferro da calza (diametro 3 mm), tre palline di gomma piena
(diametro almeno 20 mm) di cui una forata con punta da 3 mm, un potenziometro Spectrol da 10kΩ
montato su squadretta metallica a L e con un foro da 3 mm trasversale sull'asse, un connettore
maschio DIN5, un cavetto adattatore CBL-DIN. Nastro adesivo. Morsetto.
Procedura suggerita:
Si connette CBL con il potenziometro tramite il connettore maschio DIN5 e il cavetto adattatore
CBL-DIN. Si infila il ferro da calza nel foro praticato nell'asse del potenziometro e lo si fissa con
nastro adesivo. Si infila la pallina di gomma forata sulla punta del ferro. Si blocca la squadretta
metallica sul bordo del tavolo tramite il morsetto in dotazione al sonar. Si posiziona il sonar in
modo che rilevi la posizione della pallina quando il pendolo è in equilibrio. Si avvia Physics
scegliendo di usare sonda Motion e Voltage. Si blocca il potenziometro alla squadretta in modo che
con il pendolo a riposo il potenziometro sia circa a mezza corsa (in Monitor Input:V≈2.5V). Si
azzerano i sensori, si avvia l'oscillazione e l'acquisizione a grandi angoli (≈±360°) e poi a piccoli
angoli (≈±30°) con un tempo di campionamento di 0.1 s. Si ripete attaccando altre due palline alla
prima con nastro adesivo alla stessa distanza dal fulcro. Si ripete spostando le palline ad una minore
distanza dal fulcro. Se si usa Physics modificato a Padova (cfr. contributo di G. Delfitto presentato
a questo congresso) si può sfruttare la possibilità di ricavare le derivate prima e seconda rispetto al
tempo dei valori di tensione letti al cursore del potenziometro (Analyze, NewDerivatives,
scegliendo la lista L4, e salvando i dati con lo stesso nome. )
Grandi oscillazioni (potenziometro)
Accelerazione in funzione dell’Angolo x
Periodo (y) in funzione dell’Ampiezza (x)
Accelerazione in funzione di sin(x)
11
Piccole oscillazioni (sonar)
Analisi dei dati ottenuti con il pendolo.
Nello studio di piccole oscillazioni si usano i dati rilevati dal sonar. I grafici x(t), v(t), a(t)
posizione, velocità e accelerazione verso il tempo hanno qui andamento sinusoidale, come ci si può
attendere da un moto armonico.
Da misure del periodo a varie ampiezze si osserva che il moto è isocrono.
Si può controllare che il periodo non dipende dalla massa e invece dipende dalla sua distanza dal
centro di oscillazione.
Si può analizzare il modello dinamico e confrontare il periodo sperimentale [ricavato dai grafici
verso il tempo] con il valore atteso T=2π√L/g
Prendendo in esame i dati ottenuti a grandi oscillazioni con il potenziometro (dopo aver convertite
le tensioni in angoli φ), si nota subito la deformazione dei grafici di vang(t) e di aang(t) rispetto alle
funzioni sinusoidali smorzate. Anche il grafico aang (φ) non è più lineare in φ. Si può ricavare il
grafico α(sinφ): questo risulterà lineare, fornendo una conferma sperimentale del modello
aang=–g/Lsinφ.
Si potrà misurare il periodo in funzione dell'ampiezza e osservare che per grandi ampiezze il moto
non è affatto isocrono.
12
La pallina che rimbalza.
Materiale necessario: Sensore di distanza , una pallina da Ping-pong, un piano rigido e piatto su
cui far rimbalzare la pallina se il pavimento è irregolare (lastra metallica da 30x30 cm spessore ≈ 4
mm) Eventualmente una seconda pallina di gomma
Procedura suggerita:
Si fissa il sonar, puntato verso il basso, al tavolo mediante il morsetto in dotazione. Si predispone
una acquisizione di circa 3 secondi con un tempo di campionamento di 0.05s. Si tiene la pallina con
due dita sotto il sonar, ad una distanza di circa 50 cm e la si lascia cadere contemporaneamente
all'avvio della acquisizione. Si può ripetere l'esperimento con la pallina di massa diversa. Va
chiarito che il sistema di acquisizione è allestito con asse diretto verticalmente verso il basso.
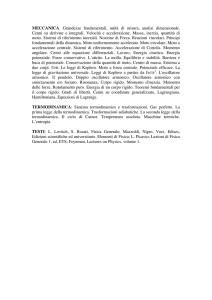
Energia (J)
0.15
0.10
Et
Ep
Ec
0.05
0.00
0.0
0.2
0.4
0.6
t (s)
0.8
1.0
1.2
Analisi dei dati ottenuti con la pallina che rimbalza
I grafici x(t), v(t), a(t) posizione, velocità e accelerazione verso il tempo danno una informazione
completa: per la posizione si hanno vari rami di parabola connessi a cuspide, per la velocità tratti di
retta, per la accelerazione (segnale un po’ rumoroso) un valore costante positivo con picchi di
grande valore negativo in corrispondenza degli urti con il pavimento.
Dal grafico della velocità verso tempo, selezionando un solo tratto di retta si ricava un valore della
accelerazione di poco inferiore a 9.81 m/s2.
Si possono trasformare i dati di distanza x (in ambiente DataMatrix Editor ) in modo da presentarli
nel modo usuale come posizione z=xo-x con asse diretto verso l'alto e origine sul pavimento
(distanza xo). In questo sistema di riferimento è più facile calcolare energia gravitazionale U=mgz e
cinetica Ec=(1/2)mv2.
Si può tracciare il grafico dell'energia E=U+Ec per studiarne l'andamento nel tempo. Si osserverà
che la perdita di energia avviene principalmente durante la collisione. Questo andamento permette
di discutere i dettagli di ciò che avviene durante l'urto: l'energia cinetica si trasforma
temporaneamente in energia elastica (che non viene rilevata dal sensore) per essere solo in parte
restituita alla fine dell'urto.
Una misura del periodo T (di salita-discesa) per diversi rimbalzi mostra che si tratta di una
oscillazione anarmonica e un grafico di T verso √Xmax, bene interpolato da una retta, può essere
interpretato nell'ambito del semplice modello di moto uniformemente accelerato (4√(2/a) è il valore
della pendenza prevista).
13
La ruota di Maxwell (yo-yo).
Materiale necessario: Sensore di distanza , un disco metallico montato su asse forato agli estremi
per attaccare i due fili di sospensione, un morsetto per sospendere l'oggetto al bordo del tavolo di
lavoro. (in alternativa una pallina di gomma con infilati diametralmente opposti due grossi aghi o
uno yo-yo)
Procedura suggerita:
Si pone il sonar a terra puntato verso l'alto per rilevare la posizione della ruota di Maxwell. Si
azzera il sensore all’equilibrio. Si ruota il disco per avvolgere i due fili sull'asse. Si predispone una
acquisizione di circa 15 secondi con un tempo di campionamento di 0.1s, e si avvia l'oscillazione
lasciando libero il disco.
Analisi dei dati ottenuti con la ruota di Maxwell
L'andamento dei grafici x(t), v(t), a(t) posizione, velocità e accelerazione verso il tempo risulta
uguale a quello della pallina che rimbalza (ovviamente con l’asse x in direzione opposta). Si può
quindi procedere analogamente, con la differenza che la presenza del moto rotatorio riduce
drasticamente il valore dell’accelerazione e impone di aggiungere nel bilancio energetico il termine
di energia di rotazione, calcolabile a partire dalla relazione tra v e ω. [Cfr. B. Pecori, G. Torzo: “The
Maxwell wheel investigated with MBL”The Physics Teacher, 36, 362-366 (1998)]
14
Il carrello che rimbalza lungo un piano inclinato.
Materiale necessario: Sensore di distanza, carrello e rotaia PASCO con fine-corsa e respingenti
magnetici, un lungo profilo di alluminio a U, una biglia (palla da biliardo o da cuscinetto a sfere) e
un metro per misurare l'inclinazione rispetto all'orizzontale.
Procedura suggerita:
Si pone il sonar, puntato verso il basso, in cima alla rotaia e si fissa il fine-corsa PASCO in fondo: Il
carrello avrà i respingenti magnetici affacciati ai corrispondenti sul fine-corsa. Si appoggia il profilo
di alluminio da un lato alla parte alta della rotaia e dall'altro su un distanziatore scorrevole. Postavi
sopra la sfera, si cerca la condizione di orizzontalità corrispondente alla sfera in equilibrio
indifferente: a questo punto l'angolo tra rotaia e profilo (facilmente misurabile) misura l'inclinazione
del piano inclinato. Si predispone una acquisizione di circa 10 secondi con un tempo di
campionamento di 0.05s. Si lancia il carrello avviando contemporaneamente la acquisizione.
Calcolo dell’accelerazione da grafico della velocità (durante una salita e discesa)
Andamento di Ec, Ep in funzione del tempo
Andamento di E=Ec+Ep in funzione del tempo
Analisi dei dati ottenuti con il carrello che rimbalza
I grafici x(t), v(t), a(t) hanno grossolanamente lo stesso andamento che nel caso della pallina. Qui
però v(t) mostra tratti di rette con pendenze leggermente diverse per la salita e la discesa. Dalle
interpolazioni parziali si può ricavare la differenza tra l'accelerazione in salita e in discesa, e,
attribuendone l'origine ad un attrito costante, ricavare il coefficiente di attrito. Eventualmente si
possono ripetere acquisizioni con diversi valori dell'attrito (gomma piuma sotto al carrello). In tal
caso dal grafico dell’energia (mgxsinα+mv2/2) verso il tempo si può vedere che la perdita di
energia è dovuta sia alle collisioni che al lavoro delle forze di attrito (il valore diminuisce lungo il
percorso sul piano inclinato). Si può misurare il periodo di oscillazione e costruire il grafico verso
√Xmax, come per l'esperimento precedente (la pendenza prevista è ancora 4√(2/a), ma ora
l’accelerazione vale a=gsinα). In questo caso si può anche studiare la dipendenza del periodo dal
valore dell'angolo di inclinazione, e si può verificarne l'indipendenza dal valore della massa .
15
L'oscillatore “di Atwood”.
Materiale necessario: Sensore di distanza, un secchio pieno d'acqua, puleggia e morsetto per
fissarla al tavolo di lavoro, due masse cilindriche metalliche (≈200g) di peso leggermente diverso
(∆mg≈metà del peso dell'acqua spostata dalla massa più pesante) con gancio, filo sottile e robusto
(lenza in dacron), piombini da pesca.
Procedura suggerita:
Si fissa la puleggia al bordo del tavolo con il filo, cui si sono attaccati i due cilindri, passante attorno
alla puleggia. Si immerge il corpo più pesante nel secchio, mantenendolo vicino al bordo ma
evitando che, oscillando lo possa toccare. Si pone a terra il sonar puntandolo in modo che rilevi la
posizione del cilindro esterno al secchio. Il cilindro nel secchio deve restare in equilibrio mezzo
dentro e mezzo fuori dall'acqua (eventualmente si appesantisce uno dei due corpi attaccando al filo
alcuni piombini). Si azzera il sensore. Immergendo il cilindro finché tocca il fondo del secchio, si
predispone una acquisizione di circa 20 secondi con un tempo di campionamento di 0.1s, e si avvia
l'oscillazione lasciando libero il cilindro.
Analisi dei dati ottenuti con l’oscillatore di Atwood
Il grafico x(t), verso il tempo assomiglia a quelli corrispondenti di massa-molla, e ciò potrebbe far
pensare ad una oscillazione armonica.
I grafici v(t) e a(t) fanno invece chiaramente capire che questo moto (nella porzione ove
l’oscillazione è più ampia) è molto più simile a quello della pallina, del carrello sul piano inclinato e
dello yo-yo: si tratta di un moto uniformemente accelerato. L'analisi deve quindi seguire quella
compiuta in precedenza.
Ripetendo l'analisi del fenomeno nella parte in cui l’oscillazione è piccola (quando il cilindro non
esce mai del tutto dall'acqua) si osserva invece che si tratta di un moto armonico smorzato.
Si può richiamare la legge di Archimede per ottenere una previsione teorica della forza di richiamo
in funzione dello spostamento dalla posizione di equilibrio, che ha il valore costante F= –∆mg
sgn(x) nel primo caso e F(x)=–∆mgx/L nel secondo caso (L è la lunghezza del cilindro)
Effettuando una misura del periodo di oscillazione T e interpolando il grafico di T verso √A, si può
controllare la validità del modello studiato; e si può sottolineare il ruolo giocato dalla massa
inerziale totale del sistema (che include il cilindro fuori dal secchio).
Eventualmente si può fare una analisi degli effetti dissipativi [cfr. B. Pecori, G. Torzo: “Come
valorizzare un antico esperimento con la tecnica MBL: la macchina di Atwood…” La Fisica nella
Scuola, XXXI, 83-96 (1998), e B. Pecori, G. Torzo, A. Sconza: “Harmonic and Anharmonic
Oscillations investigated by using a Microcomputer Based Atwood’s Machine”Am. J. Phys, 67,
228-235 (1999)]
16
L'oscillatore “di Galileo”.
Materiale necessario: Sensore di distanza , coppia di profili di alluminio a U (L≈40 cm, larghezza
≈10 mm), nastro adesivo, palla da biliardo (R≈27 mm). Eventualmente seconda coppia di profili
(L≈40 cm, larghezza ≈20 mm) e pallina da ping-pong
Procedura suggerita:
Si appoggiano i due profili a U più stretti, che saranno usati come rotaia per la palla da biliardo, sul
tavolo lungo la stessa retta ed inclinati simmetricamente di pochi gradi sulla orizzontale (usando
due libri come sostegno). Si bloccano le estremità dei profili che si toccano con il nastro adesivo. Si
posiziona il sonar sul tavolo (a circa 40 cm dalla fine della una rotaia) in modo che rilevi la
posizione della palla. Si predispone una acquisizione di circa 20 secondi con un tempo di
campionamento di 0.1s, mentre si trattiene con un dito la palla posta in cima al un lato della rotaia.
Si avvia l'oscillazione lasciando libera la palla. Si ripete l'esperimento variando l'inclinazione, poi
usando la rotaia più larga, e poi la pallina da ping-pong.
Analisi dei dati ottenuti con l’oscillatore di Galileo
I grafici x(t), v(t), a(t) hanno la stessa forma di quelli ottenuti con l'oscillatore di Atwood . Il moto è
infatti un moto uniformemente accelerato
La forza di richiamo vale ora F= -mg sin
φ sgn(x) e dipende quindi dalla inclinazione. Si può
richiamare le considerazioni fatte nello studio del moto del carrello su piano inclinato.
Misure della accelerazione (interpolazioni di v(t) nei tratti rettilinei o valori medi nel grafico a(t))
possono essere confrontate con i valori attesi sulla base del modello: si osserva che è importante
tener conto del momento di inerzia della sfera.
L'accordo tra previsioni teoriche e risultati sperimentali può non essere soddisfacente: provando a
ripetere le misure con la rotaia più larga l'accordo peggiora, usando la pallina da ping-pong peggiora
ancora: quando la sfera affonda sensibilmente nella rotaia è necessario introdurre l'effetto del raggio
giratore che differisce dal raggio della sfera.
17
L'altalena a doppio fulcro
Materiale necessario: Sensore di distanza, due barre di alluminio (L≈50 cm), un blocco
parallelepipedo stabile che agisca da fulcro (meglio se la distanza tra gli spigoli ha più di un valore),
due pesi da 0.5kg (ad esempio vasetti ermetici da 500cc pieni d'acqua), nastro adesivo.
Procedura suggerita:
Si appoggia il parallelepipedo sul bordo del tavolo e si pone la barra in equilibrio su di esso (la barra
dovrà portare marcata la metà lunghezza per facilitare il posizionamento simmetrico). Si posiziona a
terra il sonar rivolto verso l'alto in modo che rilevi la posizione dell'estremità della barra (può essere
utile un filo a piombo realizzato con uno spago sottile annodato ad una gomma da cancellare). Si
azzera il sensore. Si predispone una acquisizione di circa 20 secondi con un tempo di
campionamento di 0.1s, mentre si trattiene con un dito la barra in posizione inclinata di pochi gradi.
Si avvia l'oscillazione lasciando libera la barra. Successivamente si ripete l'esperimento
appesantendo la barra prima con una seconda barra uguale, poi con i due pesi attaccati agli estremi
con nastro adesivo.
L’analisi dei dati ottenuti con l’altalena a doppio fulcro è riportata nel testo.
18
L'altalena a fulcro tondo.
Materiale necessario: Sensore di distanza , barra di alluminio (L≈50 cm), un paio di cilindri (L≈5
cm) con diametri 20 cm e 10 cm che agiscano da fulcro, morsetto per bloccarli sul tavolo, due pesi
da 0.5 kg (ad esempio vasetti ermetici da 500cc pieni d'acqua), nastro adesivo.
Procedura suggerita:
Si blocca un cilindro sul bordo del tavolo mediante morsetto e si pone la barra in equilibrio su di
esso (la barra dovrà portare marcata la metà lunghezza per facilitare il posizionamento simmetrico).
Si posiziona a terra il sonar rivolto verso l'alto in modo che rilevi la posizione dell'estremità della
barra (può essere utile un filo a piombo realizzato con uno spago sottile annodato ad una gomma da
cancellare). Si azzera il sensore. Si predispone una acquisizione di circa 20 secondi con un tempo di
campionamento di 0.1s, mentre si trattiene con un dito la barra in posizione inclinata di pochi gradi.
Si avvia l'oscillazione lasciando libera la barra. Successivamente si ripete l'esperimento
appesantendo la barra prima con una seconda barra uguale, poi con i due pesi attaccati agli estremi
con nastro adesivo.
L’analisi dei dati ottenuti con l’altalena a fulcro tondo è riportata nel testo.