Chimica Fisica I
Termodinamica
Appunti di lezione
AA 2004-2005
Antonino Polimeno
Dipartimento di Chimica Fisica
Università degli Studi di Padova
Appendice A
Lo sviluppo della termodinamica
1798 Il Conte Rumford (Benjamin Thompson) inizia lo studio quantitativo della conversione di lavoro
in calore per mezzo del famoso esperimento della trivellazione della canna di cannone.
1799 Sir Humphry Davy studia la conversione di lavoro in calore sciogliendo ghiaccio mediante sfregamento.
1824 Sadi Carnot pubblica le sue famose ”Réflexions sur la puissance du feu et sur les machines propres
dvelopper cette puissance” che includono il nuovo concetto di ciclo termico ed il principio della
macchina termica reversibile che dipende solo dalla temperatura delle due riserve termiche.
1842 Mayer postula il principio di conservazione dell’energia.
1847 Helmholtz formula il principio di conservazione dell’energia, indipendentemente da Mayer.
1843-1848 James Prescott Joule pone le fondamenta sperimentali della prima legge della termodinamica con un famoso esperimento che stabilisce l’equivalenza tra calore e lavoro.
1848 Lord Kelvin (William Thomson) definisce una scala di temperatura assoluta basata sul ciclo di
Carnot.
Figura A.1: Nicholas Léonard Sadi Carnot (1796 - 1832)
1
2
APPENDICE A. LO SVILUPPO DELLA TERMODINAMICA
Figura A.2: Josiah Willard Gibbs (1839 - 1903)
1850 Rudolf J. Clausius è probabilmente il primo ad intuire l’esistenza dei due principi di base, la
prima e la seconda legge della termodinamica e ad introdurre il concetto di energia interna.
1865 Clausius formula la prima e la seconda legge della termodinamica
1. L’energia dell’universo è costante
2. L’entropia dell’universo tende ad un massimo
1875 Josiah Willard Gibbs pubblica il suo fondamentale ” On the Equilibrium of Heterogeneous
Substances” che estende la termodinamica ai sistemi eterogenei ed alle reazioni chimiche, definendo
l’importante concetto di potenziale chimico. Gibbs è il padre della termochimica.
1897 Max Planck riformula la seconda legge nella forma ӏ impossibile costruire una macchina che,
lavorando in un ciclo completo, non produca altro effetto che il sollevamento di un peso ed il
raffreddamento di una riserva termica”.
1909 Caratheodory presenta la sua riformulazione della termodinamica su base assiomatica, in forma
completamente matematica.
Appendice B
Introduzione assiomatica dei principi
della termodinamica
In questa (lunga) Appendice riassumiamo l’esposizione dei principi della termodinamica senza fare uso
delle proprietà delle macchine termiche, ma usando invece un approccio matematico, nello spirito, se
non nella sostanza, di Caratheodory. La simbologia e le definizioni possono essere lievemente diversi
rispetto ai Capitoli principali, per esigenze di chiarezza. L’appendice è autoreferenziale, può essere cioè
letta indipendentemente dal resto del testo.
B.1
Definizioni
Un sistema termodinamico X è una parte dell’universo, completamente descritto dai valori assunti da
un insieme di finito di grandezze, almeno una delle quali sia definibile di ”non deformazione”, ovvero non
descriva la geometria del sistema. Il resto dell’universo si definisce come l’ambiente. Distinguiamo o sistemi in isolati (nessuna interazione con l’ambiente), chiusi (nessuno scambio di materia con l’ambiente),
e aperti (nè isolati nè chiusi). Uno stato di equilibrio di un sistema è uno stato definito univocamente dai valori di un numero minimo di grandezze fisiche, che se comprendono tutte le coordinate
di deformazione (scelte in modo che siano indipendenti), sono dette coordinate generalizzate o
termodinamiche: x = (x1 , . . . , xn ).
Una sequenza continua Σ di stati di equilibrio di X è costituita da un insieme di stati di equilibrio
descrivibili come
xi = fi (t),
i = 1, . . . , n
(B.1)
dove t è un numero reale t0 < t < t00 e le funzioni fi (t) sono continue.
Una transizione pseudostatica tra due stati x1 e x2 è la transizione di X da x1 a x2 attraverso
una sequenza continua. Una transizione quasistatica è una transizione pseudostatica tale che il
lavoro fatto su X è compiuto solo dalle forze che mantengono K in equilibrio. In una transizione
quasistatica infinitesimale dallo stato x allo stato x + dx, il lavoro compiuto è
dW = −
m
X
Pi dxi
(B.2)
i=1
3
4 APPENDICE B. INTRODUZIONE ASSIOMATICA DEI PRINCIPI DELLA TERMODINAMICA
dove m < n è il numero delle coordinate di deformazione e Pi sono le forze generalizzate, funzioni di x.
Una transizione si dice reversibile se esiste una trasformazione inversa che riporta sia il sistema che
l’ambiente al loro stato iniziale. Si dimostra che una transizione quasistatica è reversibile, ammettendo
l’invertibilità delle funzioni Pi e, affermazione meno ovvia, che una transizione reversibile è quasistatica.
Una parete adiabatica è una separazione del sistema dall’ambiente tale che lo stato di equilibrio
del sistema possa essere disuturbato solo con mezzi meccanici. Una transizione adiabatica è una transizione nel corso della quale il sistema resta adiabaticamente isolato. Una trasformazione isometrica è
una transizione nel corso della quale tutte le variabili di deformazione del sistema restano costanti.
Siano n le coordinate di X . Il sistema è detto standard se
1. una sola coordinata è di non-deformazione, m = n − 1.
2. lo stato presente del sistema non contiene informazioni sui suoi stati passati
3. non sono presenti tensioni di superficie ed interazioni a distanza tra parti del sistema
Uno stato di equilibrio di un sistema standard è rappresentato univocamente da un punto dello spazio
euclideo Rn . Una transizione pseudostatica è rappresentata da una curva in Rn , definita parametricamente mediante le funzioni fi (t).
B.2
Principio zero
Siano A e B due sistemi standard, negli stati di equilibrio a = (a1 , . . . , an ) e b = (b1 , . . . , bm ), separati
da una parete adibatica; eliminando la parete e stabilendo un contatto diatermico (cioè non adiabatico)
i due sistemi evolvono verso uno stato di equilibrio espresso dalla relazione
f (a, b) = 0
(B.3)
Principio zero Due sistemi standard in equilibrio con un terzo sistema standard, sono in equilibrio
fra loro
Ogni coppia di relazioni di equilibrio (simbolo *
)) implica la terza
A*
) B ⇐⇒ f (a, b) = 0
(B.4)
B*
) C ⇐⇒ g(b, b) = 0
(B.5)
A*
) C ⇐⇒ h(a, c) = 0
(B.6)
da cui discende il sistema di equazioni equivalente
ξ(a) = η(b) = ζ(c)
(B.7)
La funzione ξ(a) = θ è la temperatura empirica, che definisce (in modo non univoco) una ipersuperficie
in Rn ; sostituendo la coordinata di non deformazione, an con θ, possiamo indicare lo stato di equilibrio
del sistema A con il set di coordinate (a1 , . . . , an−1 , θ).
5
B.3. FORME PFAFFIANE
B.3
Forme pfaffiane
Lo studio dell proprietà del sistema X e la definizione delle principali funzioni caratteristiche (energia
interna ed entropia) è formalmente inquadrabile nell’ambito di un unico problema: la descrizione delle
proprietà delle espressioni differenziali pfaffiane o forme pfaffiane:
dL =
n
X
Xi (x)dxi
(B.8)
i=1
cioè le funzioni lineari omogenee dei differenziali delle n variabili indipendenti x. le forme pfaffiane
hanno alcune interessanti proprietà.
Sia dL il differenziale totale di una funzione R(x):
dL =
n
X
Xi (x)dxi =
n
X
∂R
i=1
i=1
∂xi
dxi → Xi =
∂R
∂xi
(B.9)
Applicando il teorema di Schwarz
∂
∂xj
∂R
∂xi
=
∂
∂xi
∂R
∂xj
(B.10)
segue che
∂Xi
∂xj
=
∂Xj
(B.11)
∂xi
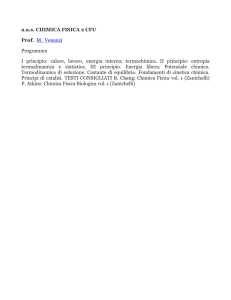
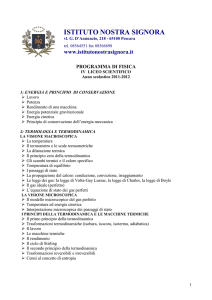
che è una condizione necessaria, e nel seguito vedremo anche sufficiente, perché dL sia un differenziale totale di funzione. L’equazione differenziale dL = 0 si riduce in questo caso a dR = 0, risolta
dall’integrale generale R(x) = k con k parametro; è questo un equivalente algebrico unico della
forma differenziale, ed è rappresentato da una famiglia di ipersuperficie non intersecantensi in R n . SI
noti che se dL è un differenziale totale, l’integrale di linea da un punto x1 ad un punto x2 è indipendente
dal cammino di integrazione
I x2
x1
dL = R(x2 ) − R(x1 ) = R2 − R1
(B.12)
Piú in generale, dL = 0 ha un equivalente algebrico unico R(x) = 0 se esistono due funzioni q(x) e
R(x) tali che
dL = qdR
(B.13)
Anche in questo caso possiamo ricavare una condizione necessaria (e sufficiente), infatti
dL =
n
X
∂R
q
i=1
∂xi
dxi → Xi = q
∂R
∂xi
(B.14)
da cui segue (mediante banali applicazioni del teorema di Schwarz) la relazione per ogni terna ijk:
Cijk = Xi (Xj,k − Xk,j ) + Xj (Xk,i − Xi,k ) + Xk (Xi,j − Xj,i ) = 0
(B.15)
6 APPENDICE B. INTRODUZIONE ASSIOMATICA DEI PRINCIPI DELLA TERMODINAMICA
Figura B.1: Indipendenza dal cammino per un integrale di linea di un differenziale totale
7
B.3. FORME PFAFFIANE
dove Xi,j = ∂Xi /∂xj . In sintesi, dL = 0 ha un equivalente algebrico unico se (e solo se, come vedremo
tra poco), per ogni terna ijk si ha Cijk = 0. Se è cosı́ la forma si dice olonomica od integrabile; 1/q è
detto fattore integrante. Si noti che le forme bidimensionali sono sempre integrabili, infatti se
dL = M dx + N dy
(B.16)
ammettiamo che sia vero che
λM dx + λN dy = dR
(B.17)
allora
λM =
∂R
∂x
,
λN = derRy
(B.18)
da cui
∂λM
=
∂y
∂λN
(B.19)
∂x
ovvero
N
∂λ
∂x
−M
∂λ
∂y
=
∂M
∂y
+
∂N
∂x
λ
(B.20)
ed infine
N
∂ln λ
∂x
−M
∂ln λ
∂y
=
∂M
∂y
−
∂N
(B.21)
∂x
che è un’equazione differenziale in λ. Infine si può notare che per una forma tridimensionale, dL =
~ è il vettore formato dalle funzioni M , N , P , la forma è un differenziale totale
M dx + N dy + P dz, se R
~ = 0, mentre è olonomica se R
~ · rotR
~ = 0.
se rotR
Riportiamo infine una dimostrazione della sufficienza delle condizioni di olonomicità di una forma
dL. Siano dunque vere le condizioni di olonomicità. Supponiamo che x1 , . . . , xn−2 restino costanti;
rimane una forma bidimensionale, integrabile
dL2 = Xn−1 dxn−1 + Xn dxn = wdH
(B.22)
eliminando la condizione che x1 , . . . , xn−2 restino costanti si ottiene l’uguaglianza
Xn−1 dxn−1 + Xn dxn = w dH −
n−2
X
i=1
∂H
∂xi
dxi
(B.23)
L’uguaglianza (B.23) si ha dal fatto che in generale
dH =
∂H
∂xn−1
dxn−1 +
∂H
∂xn
dxn +
n−2
X
i=1
∂H
∂xi
dxi
(B.24)
mentre quando x1 , . . . , xn−2 restino costanti
dH =
∂H
∂xn−1
dxn−1 +
∂H
∂xn
dxn = dL2
(B.25)
8 APPENDICE B. INTRODUZIONE ASSIOMATICA DEI PRINCIPI DELLA TERMODINAMICA
da cui
∂H
∂xn−1
=
Xn−1
,
w
∂H
∂xn
=
Xn
w
(B.26)
da cui segue la (B.23). Possiamo ora riscrivere dL = 0 come
n−2
X
∂H
X
dxi + dH = 0
i −
w
∂x
i
i=1
(B.27)
Definiamo ora un nuovo set di n variabili
yi = x i ,
i = 1, . . . , n − 2, n
yn−1 = H
(B.28)
(B.29)
(B.30)
e di funzioni
Yi =
Xi ∂H
−
w
∂xi
(B.31)
Resta l’uguaglianza
n
X
Yi dyi = 0
(B.32)
i=1
che è una forma pfaffiana, ottenuta dalla precedente solo mediante passaggi algebrici, con Y n−1 = 1 e
Yn = 0. Anche per le nuova forma devono valere le condizioni di olonomicità (la verifica è immediata),
e da queste si verifica subito che Yi,n cioè le funzioni Yi non dipendono da yn ; la forma è stata perciò
ridotta effettivamente ad un forma ad n − 1 variabili. Procedendo in questo modo possiamo giungere
ad una forma a sole due variabili, che è certamente integrabile; dunque anche la forma originaria è
integrabile. Si deve notare che in questa ed altre dimostrazioni formali si assume implicitamente che le
varie funzioni Xi etc. siano definite in tutto Rn .
B.4
Primo principio
bf Primo principio: il lavoro compiuto in una trasformazione adiabatica dipende solo dallo stato iniziale
e dallo stato finale del sistema
L’enunciato permette di definire la funzione di stato energia interna. Infatti siano dati tre stati di
equilibrio del sistema x1 ,x2 e x3 ; sia w(x1 , x2 ) il lavoro adiabatico compiuto per andare da x1 a x2 ; la
funzione w esiste per il primo principio e sempre per il primo principio deve essere
w(x1 , x2 ) + w(x2 , x3 ) = w(x1 , x3 )
(B.33)
quindi x(2) è eliminabile dal primo membro; ciò significa che w ha la forma
w(x1 , x2 ) = U (x1 ) − U (x2 )
(B.34)
B.4. PRIMO PRINCIPIO
9
La definizione di Uè indipendente dal fatto se esista o meno una forma pfaffiana che esprime il lavoro
differenziale, ciò che è possibile solo in una trasformazione quasistatica
dw = −
n−1
X
Pi dxi
(B.35)
i=1
si noti che anche per una trasformazione pseudostatica possiamo scrivere un’equazione simile alla (B.35),
ma le Pi vengono a dipendere anche da variabili diverse dalle xi , e quindi non si ha una forma pfaffiana.
Come naturale corollario del primo principio discende che la forma pfaffiana (B.35) (che è completa,
a rigore solo aggiungendo il termine in Pn dxn , con Pn = 0) relativa ad un’adiabatica reversibile è un
differenziale esatto, dw = dU .
D’altro canto possiamo enunciare il primo principio esattamente come: il pfaffiano relativo al lavoro
scambiato in una trasformazione adiabatica reversibile è esatto, e definisce una funzione di stato, U ,
che poi resta definita, naturalmente, anche per transizioni non reversibili. Insomma: il primo principio
è interpretabile come l’affermazione dell’esattezza di una classe di forme pfaffiane (il lavoro adiabatico).
In condizioni adiabatiche per una transizione generica possiamo scrivere
∆U − wad = 0
(B.36)
in condizioni non adiabatiche
∆U − w 6= 0 = q
(B.37)
o in forma differenziale
dU = dw + dq
(B.38)
La grandezza q è la differenza tra il lavoro compiuto per andare da uno stato ad un altro in condizioni
adiabatiche ed il lavoro compiuto per effettuare la medesima transizione in condizioni non adiabatiche
q = wad − w
(B.39)
Si noti che in una trasformazione quasistatica
dU =
n
X
∂U
i=1
∂xi
+
∂U
∂θ
(B.40)
da cui segue per il primo principio in forma differenziale che possiamo scrivere dq come una forma
pfaffiana
dq =
n
X
Xi dxi
(B.41)
i=1
posto xn = θ, Xi = Pi +∂U/∂xi (i = 1, . . . , n−1), Xn = ∂U/∂θ; in una transizione adiabatica reversibile
n
X
i=1
Xi dxi = 0
(B.42)
10APPENDICE B. INTRODUZIONE ASSIOMATICA DEI PRINCIPI DELLA TERMODINAMICA
B.5
Secondo principio
Il secondo principio ha lo scopo di affermare l’olonomicità della forma (B.41) ‘e di trovarne un fattore
integrante. Nella trattazione originaria di Caratheodory tali asserzioni non sono dirette, ma basate sul
seguente teorema
teorema di Caratheodory: se ogni intorno di un qualunque punto arbitrario x1 di Rn contiene
punti x2 inaccessibili reversibilmente da x1 , ovvero non collegabili tramite una curva soluzione
dell’equazione
dq = 0
(B.43)
allora la forma dq è olonomica
In effetti nella formulazione di Caratheodory il secondo principio assume la forma
Secondo principio: in ogni intorno di ogni stato x di un sistema adiabaticamente isolato esistono
stati non accessibili, reversibilmente o meno, da x.
Tornando ora alla forma pfaffiana che esprime dq in una trasformazione quasistatica, il secondo principio
afferma che in ogni intorno di uno stato x esistono stati inaccessibili lungo cammini reversibili che
partano da x, da cui segue che dq è olonomica, ovvero che esistono due funzioni λ ed s tali che
dq = λds
B.6
(B.44)
Discussione
Il problema fondamentale è dunque l’integrabilità di dq. Abbiamo (almeno) tre possibili approcci
1. la dimostrazione analitica (Caratheodory) o geometrica (Buchdhal) del teorema di Caratheodory,
da cui poi discende, in forza dell’enunciato assiomatico di secondo principio secondo Caratheodory,
l’esistenza di λ ed s (metodo I)
2. la dimostrazione semplificata di Turner et al.; del’esistenza in Rn di superficie adiabatiche non
intersecantesi, a partire dal solo assioma, senza usare il teorema; dall’esistenza di dette superficie,
si può dimostrare l’olonomicità di dq (metodo II);
3. l’abbandono completo dell’assioma di Caratheodory e la dimostrazione dell’esistenza di superficie
adiabatiche non intersecantesi a partire dall’assioma di Kelvin del secondo principio - in pratica,
con ciò dimostrando l’equivalenza tra l’assioma di Caratheodory e quello di Kelvin (metodo III).
Consideriamo dunque il (metodo I), e riassumiamo una delle dimostrazioni piú semplici, dovuta a
Buchdhal, del teorema di Caratheodory. Riscriviamo per comodità l’enunciato del teorema: condizione
necessaria e sufficiente affinché la forma dq sia integrabile è che in ogni intorno di un qualunque punto
arbitrario x0 vi siano punti x inaccessibili lungo una curva soluzione dell’equazione dq = 0.
11
B.6. DISCUSSIONE
necessità Sia la forma integrabile per ipotesi: siano x0 e x00 due punti arbitrari; l’equazione differenziale
determina perciò una ipersuperficie passante per x0 , sulla quale giacciono tutte le curve soluzioni
passanti per x0 ; poiché x00 è arbitrario, può essere scelto in modo che non giaccia sull’ipersuperficie,
e quindi risulta inaccessibile da da x0 .
sufficienza Si deduce l’integrabilità della forma dall’ipotesi di esistenza di punti inaccessibili in ogni
intorno di un punto dato, dimostrando, mediante un opportuno cambio di variabili, l’equivalenza
della forma originaria ad una forma a due variabili, sempre integrabile. Ammettiamo come al
solito che le varie funzioni Xi siano continue e derivabili ovunque in Rn . Cominciamo con il
determinare due funzioni µ(x), ξ(x) tali che
Xi =
1 ∂ξ
,
µ ∂xi
i = 1, . . . , n − 1
(B.45)
dunque ξ può essere soluzione dell’equazione
Xn
∂ξ
− Xn−1
∂xn − 1
∂ξ
∂xn
=0
(B.46)
mentre
µ=
1 ∂ξ
Xn ∂xn
(B.47)
L’equazione originaria dq = 0 assume la forma
n−2
X
µXi dxi +
i=1
n
X
∂ξ
i=1
∂xi
dxi = 0
(B.48)
Ed esprimendo il differenziale totale di ξ otteniamo
n−2
X
i=1
µXi −
∂ξ
∂xi
dxi + dξ = 0
(B.49)
passando dall’insieme di variabili x all’insieme (x1 , . . . , xn−1 , ξ) si ha
µXi −
∂ξ
∂xi
= Qi (x1 , . . . , xn − 2, ξ),
i = 1, . . . , n − 1
(B.50)
ed infine
X
i = 1n−2 Qi dxi + dξ = 0
(B.51)
Ma le funzioni Qi non dipendono da xn−1 . Infatti consideriamo un punto arbitrario x0 , di coordinate 0 x1 , . . . ,0 xn−1 ,0 ξ. Il segmento
xi =
xn−1 =
ξ =
0 xi ,
i = 1, . . . , n − 2
(B.52)
0 xn−1
+ (1 xn−1 −0 xn−1 )τ
(B.53)
0ξ
(B.54)
12APPENDICE B. INTRODUZIONE ASSIOMATICA DEI PRINCIPI DELLA TERMODINAMICA
con τ parametro e 1 xn−1 arbitrario è una curva soluzione della (B.51), e porta da x0 (con τ = 0)
al punto x1 = (0 x1 , . . . ,0 xn−2 ,0 xn−1 ,0 ξ). Consideriamo ora la curva
xi =
xn−1 =
0 xi
+ (2 xi −0 xi )τ,
i = 1, . . . , n − 2
1 xn−1
(B.55)
(B.56)
dove i numeri 2 xi sono arbitrari. Scegliendo opportunamente la funzione ξ anche tale curva è
solutzione della (B.51). Precisamente, esprimiamo le xi in funzione di τ grazie alle (B.55) e (B.56)
n−2
X
Qi (τ, ξ)(2 xi −0 xi )dτ + dξ = 0
(B.57)
i=1
che essendo in due variabili (τ e ξ) ha un integrale ξ = φ(τ,0 x1 , . . . ,0 xn−2 ,2 x1 , . . . ,2 xn−2 ,1 xn−1 ),
dove la costante di integrazione è scelta in modo che 0 ξ = φτ =0 . Per τ = 1 resta definito un punto
x2 di coordinate (2 x1 , . . . ,2 xn−2 ,1 xn−1 ,2 ξ) dove 2 ξ = φτ =1 .
Infine, consideriamo un segmento, anch’esso soluzione della (B.51), che vada da x 2 con τ = 0 a x
con τ = 1
xi =
xn−1 =
ξ =
2 xi ,
i = 1, . . . , n − 2
(B.58)
1 xn−1
+ (3 xn−1 −1 xn−1 )τ
(B.59)
2ξ
(B.60)
dove 3 xn−1 è arbitrario. Possiamo ora dimostrare che, in forza delle ipotesi iniziali
∂2ξ
∂ 1 xn−1
=0
(B.61)
Ragioniamo per assurdo. Supponiamo di scegliere x0 (che è arbitrario) in modo tale che
∂2ξ
∂ 1 xn−1
|1 xn−1 =0 xn−1 6= 0
(B.62)
segue che per le supposte condizioni di continuità, possiamo dedurre l’esistenza di numeri i , con
(i = 0, 1, . . . , n − 2, n) tali che per ogni
2 x i :0
xi − i ≤ 2 xi ≤ 0 xi + i ,
i = 0, . . . , n − 2
(B.63)
si possono determinare 1 xn−1 : 0 xn−1 − 0 ≤1 xn−1 ≤0 xn−1 + 0 in modo tale che 2 ξ prenda ogni
valore nell’intervallo [0 ξ − n ,0 ξ + n ]. Dunque, con fatica, abbiamo verificato che se per ogni
numero positivo n−1 prendiamo 0 xn−1 − n−1 ≤3 xn−1 ≤0 xn−1 + n−1 si vede che tutti i punti x
dell’intorno di x0
−1 ≤ xi −0 xi ≤ i ,
−0n ≤ ξ −0 xi ≤ n ,
i = 1, . . . , n − 1
(B.64)
13
B.6. DISCUSSIONE
sono accessibili, contrariarmente all’ipotesi iniziale. Perciò φ e quindi Qi sono indipendenti da
xn−1 e la B.51 non dipende da dxn−1
X
i = 1n−2 Qi (x1 , . . . , xn−2 )dxi + dξ = 0
(B.65)
Applicando le medesime considerazioni, e cosı́ via per n−2 cambi di variabile si giunge ad ottenere
Z(x1 )dx1 + dζ(x1 , . . . , xn ) = 0
(B.66)
equivalente alla forma iniziale e facilmente integrabile
Z
x1
0 x1
Z(x)dx + ζ(x1 , . . . , xn ) = ζ(0 x1 , . . . ,0 xn ).
(B.67)
Dunque la forma originaria è integrabile ed il teorema è dimostrato
Avendo dimostrato che la la forma pfaffiana dq è integrabile, cioè che dq = λdσ, possiamo ricavare
definizione dell’entropia metrica e della temperatura termodinamica. Dati due sistemi A, di coordinate
a = (a1 , . . . , an−1 , θA ) = (a, θA ) e B, di coordinate b = (b1 , . . . , bn−1 , θB ) = (b, θB ), per una transizione
quasistatica
dqA = λA (a)dσA (a),
dqB = λB (b)dσB (b)
(B.68)
Sia C il sistema risultante dal contatto diatermico tra A e B: poiché θA = θB = θ, le n+m−1 coordinate
di C sono a, b, θ. Si ha che
dq = λC dσC = λA dσA + λB σB
(B.69)
Sostituiamo σA a an−1 e σB a bm−1 , e osserviamo che
dσC =
λB
λA
dσA +
dσB
λC
λC
(B.70)
dσC è però un differenziale totale, quindi σC è indipendente da θ, a1 , . . . , an−2 , b1 , . . . , bm−2 . Le funzioni
λA , λB , λC sono funzioni di (σA , θ), (σB , θ), (σA , σB , θ): se λC dipendesse per esempio da bk , essendo
λA certamente indipendente da bk , λA /λC dipenderebbe da bk e cosı́ σC contrariamente alla conclusione
precedente. Ma λA /λC e λB /λC sono anche indipendenti da θ; quindi λA , λB , λC devono dipendere da
una medesima funzione T (θ), che compare unicamente come fattore; T (θ) non è costante altrimenti dq
sarebbe un differenziale esatto:
dqA = T (θ)φA (σA )dσA ,
dqB = T (θ)φB (σB )dσB ,
dqC = T (θ)φB (σC )dσC
(B.71)
T (θ) è la temperatura assoluta o termodinamica.
Possiamo inoltre scrivere
φC (σA , σB )dσC (σA , σB ) = φA (σA )dσA + φB (σB )dσB
(B.72)
poniamo
dSA = φA (σA )dσA ,
dSB = φB (σB )dσB
(B.73)
14APPENDICE B. INTRODUZIONE ASSIOMATICA DEI PRINCIPI DELLA TERMODINAMICA
Sostituiamo SA , SB a σA , σB :
φC (SA , SB )dσC (SA , SB ) = dSA + dSB = d(SA + SB )
(B.74)
σC e φC sono perciò funzioni di SA + SB ; posto φC (SA + SB )d(SA + SB ) = dSC , abbiamo
dSC = d(SA + SB )
(B.75)
e sciegliendo opportunamente le costanti di integrazione
SC = S A + S B
(B.76)
con il che resta dimostrato che S è una funzione di stato estensiva, e che possiamo scrivere
dq = T dS.
(B.77)