Capitolo IV – Equazioni di bilancio.
IV.1 – Premessa
Il moto dei fluidi incomprimibili è governato dalle leggi fondamentali della Meccanica che,
applicate al corpo fluido, permettono di ottenere le equazioni di bilancio delle grandezze
caratterizzanti il moto del corpo fluido: massa, quantità di moto, momento della quantità di moto
ed energia.
Applicando le leggi della meccanica ad un corpo fluido occupante un volume finito (volume
materiale) si otterranno le equazioni di bilancio in forma globale.
Applicando le leggi della meccanica ad un corpo fluido occupante un volume infinitesimo si
otterranno le equazioni di bilancio in forma indefinita o differenziale.
IV.2 – Equazione di bilancio della massa
IV.2.1 Forma globale
Si consideri un corpo fluido occupante un volume materiale V, limitato dalla superficie σ. La massa
del corpo fluido è fornita dall’integrale della densità di massa ρ esteso al volume materiale V:
M = ∫ ρ ( x, y, z , t )dV
(1)
V
La massa M del corpo fluido non varia: come affermava A. Lavoisier “nulla si crea, nulla si
distrugge, tutto si trasforma”. L’equazione di bilancio della massa può essere pertanto formulata
imponendo il fatto che la massa resti costante durante il moto ossia che la sua variazione rispetto al
tempo sia nulla:
dM d
= ∫ ρ dV = 0
dt
dt V
(2)
La formulazione lagrangiana (2) del principio di conservazione della massa non è molto adatta allo
svolgimento dei calcoli tecnici, che richiedono piuttosto la formulazione euleriana. Per passare dalla
formulazione lagrangiana a quella euleriana è necessario applicare il teorema del trasporto nelle
forme proposte dalle formule (34), (35) del I capitolo:
∂ρ
d
dt ∫ ρ dV = ∫ ∂t dV − ∫ ρ (u ⋅ n )dσ
V
V
σ
d ρ dV = dρ + ρdiv(u )dV
∫ dt
dt V∫
V
(3)
Gli integrali a primo membro sono calcolati sul volume materiale mentre gli integrali a secondo
membro vengono calcolati sul volume di controllo, coincidente istantaneamente con il volume
materiale, e sulla superficie σ di quest’ultimo. Considerando la prima delle (3) e imponendo la (2)
si ha:
∂ρ
∫V ∂t dV − σ∫ ρ (u ⋅ n )dσ = 0 (4)
1
Se il volume di controllo è limitato da superfici fisse la derivata locale rispetto al tempo può essere
portata fuori dal segno di integrale e la (4) può essere posta nella forma:
∂
ρdV
∂t V∫
1
424
3
∫σ ρ (u ⋅ n )dσ
−
Variazione temporale della densità.
=0
(5)
14243
Flusso di massa attraverso la superficie
del volume di controllo.
Il primo termine a primo membro è la variazione della massa contenuta nel volume di controllo
dovuta alla variazione temporale della densità. Il secondo termine a primo membro è il flusso di
massa attraverso la superficie di frontiera σ del volume di controllo V. Il flusso di massa è anche
detto portata in massa e si misura, nelle unità del sistema internazionale, in [kg s-1]. L’equazione
(5) è dunque l’equazione di bilancio della massa in forma globale. Si consideri ora un fluido
omogeneo e incomprimibile (ρ=cost); di conseguenza la (5) assume la forma particolarmente
significativa:
∫ ρ (u ⋅ n )dσ
=0
(6)
σ
esprimente il fatto che in un volume finito non può avvenire accumulo o sottrazione di massa di
fluido incomprimibile. Se, come avviene nella quasi totalità delle applicazioni, la superficie chiusa
σ è costituita da una parte rigida e impermeabile, una sezione di ingresso e una sezione di uscita: la
(6) assume la semplice forma (essendo il flusso di massa nullo sulla parte di superficie
impermeabile):
∫σ ρ (u ⋅ n )dσ + σ∫ ρ (u ⋅ n )dσ = 0
i
(7 )
u
equivalente a dire che la portata in massa entrante deve eguagliare la portata in massa uscente ossia
che la portata in massa che attraversa istantaneamente la superficie del volume di controllo è
costante. Inoltre, cambiando il verso della normale sulla superficie di uscita , si ha:
∫σ ρ (u ⋅ n )dσ = σ∫ ρ (u ⋅ n )dσ
i
(8)
u
Poiché inoltre la densità di massa è costante, la (8) può infine porsi nel seguente modo:
∫ (u ⋅ n )dσ = σ∫ (u ⋅ n )dσ
σi
(9)
u
esprimente la costanza della portata in volume o portata volumetrica Q = ∫ (u ⋅ n )dσ .
σ
Quest’ultima grandezza, misurata in [m3 s-1], fornisce il volume di fluido che nell’unità di tempo
transita attraverso la superficie considerata. Nei calcoli tecnici riguardanti i liquidi, ossia i fluidi
omogenei e incomprimibili, il bilancio di conservazione della massa viene espresso nella quasi
totalità dei casi tramite la (9) applicata alla configurazione esaminata. Di particolare interesse è il
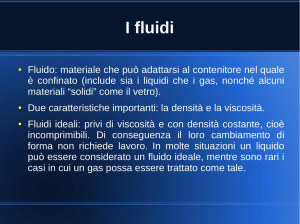
caso in cui una dimensione geometrica prevalga sulle altre, come nelle condotte. Si consideri allora
(figura IV.1) una condotta di sezione circolare, con diametro variabile (ad esempio crescente) ed un
volume di controllo limitato da due sezioni trasversali, di ingresso σ1, avente diametro D1, di uscita
σ2, avente diametro D2, e una porzione di superficie laterale della condotta, rigida e impermeabile.
2
Si consideri, come è ragionevole, che la velocità, sulle sezioni trasversali, sia tutta diretta come la
normale e sia tangente alla superficie laterale: il prodotto scalare u ⋅ n coincide con il modulo della
velocità u sulle superfici di ingresso e uscita ed è nullo sulla superficie laterale impermeabile. La (9)
diviene perciò:
Q=
(10)
∫ udσ = σ∫ udσ
σ1
2
cioè una relazione che lega le grandezze di ingresso e uscita, senza far riferimento al dettaglio di
quanto avviene nel volume di controllo: la qual cosa è esattamente il vantaggio offerto dalle
equazioni in forma globale. Introducendo la velocità media U sulla sezione σ :
Q = ∫ udσ = Uσ
(11)
σ
che elimina la necessità di conoscere la velocità locale u sulla sezione, si può porre la (11) nella
forma:
Q = U1σ 1 = U 2σ 2
(12)
chiaramente più utile per le applicazioni ed ampiamente usata nei problemi pratici riguardanti il
moto dei liquidi.
σ, D,U
n
n
s
σ1, D1,U1
σ2, D2,U2
ds
Figura IV.1 Condotta divergente. Conservazione della portata volumetrica.
IV.2.2 – Forma indefinita o differenziale
La forma indefinita o differenziale del bilancio della massa si ottiene imponendo la condizione (2)
alla seconda delle (3), considerando il fatto che tale condizione deve valere per un volume di
controllo V arbitrario, il che si verifica annullando l’integrando:
dρ
+ ρdiv( u ) = 0
dt
(13)
La (13) vale in ogni punto occupato istantaneamente dal corpo fluido. La (13) è precisamente la
equazione di bilancio della massa in forma indefinita o differenziale. In particolare per un fluido
dρ
incomprimibile (
= 0 ) assume la forma:
dt
3
div( u ) = 0
(14)
che indica il fatto che il campo vettoriale della velocità è a divergenza nulla o solenoidale.
IV.2.3 – Forma indefinita per le correnti lineari.
Una particolare forma indefinita o differenziale del bilancio della massa la si può ottenere
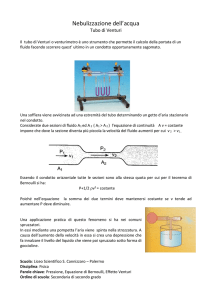
ipotizzando che l’elemento fluido sia un tronco infinitesimo di un tubo di flusso. Un tronco di tubo
di flusso è un corpo fluido delimitato da una superficie laterale tutta costituita da linee di flusso e da
due superfici trasversali perpendicolari in ogni punto a tali linee (figura IV.2). La superficie laterale
del tubo di flusso è chiaramente impermeabile per definizione: la velocità del fluido è parallela ad
essa e pertanto il prodotto scalare della velocità per la normale entrante alla superficie laterale è
nullo: u ⋅n = 0 . Le superfici trasversali (σ in figura IV.2) sono invece superfici attraversate dal
fluido: ivi il prodotto scalare u ⋅ n è chiaramente diverso da zero. Il luogo geometrico dei centri di
figura delle superfici trasversali è detto asse del tubo, sul quale si può individuare l’ascissa
curvilinea s.
u
n
σ
s
n
u
n
n
Figura IV.2 Elementi geometrici del tubo di flusso.
Lo schema del tubo di flusso ha importanza fondamentale nell’Idrodinamica pratica, soprattutto
quando le linee di flusso divengono tutte sensibilmente parallele tra di loro. Si parla allora di
corrente e di corrente lineare se le linee di flusso, oltre ad essere parallele tra loro, sono anche
rettilinee o hanno curvatura trascurabile. Lo studio delle correnti lineari è importante perché, oltre
ad essere rappresentativo di molti fenomeni reali, permette di introdurre una notevole
semplificazione nella trattazione, consistente nella possibilità di assumere una unica componente
della velocità per rappresentare il moto: la componente tangente all’asse della corrente. In altre
parole lo schema di corrente consente di effettuare una riduzione delle dimensioni spaziali del moto
del fluido da tre alla dimensione individuata dalla direzione spaziale dell’asse della corrente. Lo
schema di corrente lineare si può estendere anche al caso in cui le linee di flusso non siano
rigorosamente parallele tra loro, ma siano caratterizzate da variazioni delle superfici trasversali
“piccole” rispetto alla estensione longitudinale dell’asse in cui tali variazioni avvengono. In tal caso
si parla di correnti lineari gradualmente variate. Ciò detto si consideri un elemento infinitesimo di
tubo di flusso di estensione ds, di area σ e volume infinitesimo dV=σ ds, in cui la velocità del fluido
sia diretta come la normale entrante n sulla generica sezione σ di ingresso-uscita, con verso
4
concorde ad n nella sezione di entrata e opposto ad n in quella di uscita. Inoltre si ponga:
∫ ρ (u ⋅ n )dσ = ρUσ essendo ρ, U rispettivamente il valore medio della densità e della velocità sulla
σ
sezione σ. L’applicazione della equazione di bilancio della massa in forma integrale (5) al
volumetto, tenendo conto del fatto che il volume di integrazione è dato dalla: dV = σds , fornisce:
∂ρσ
ds = ρUσ s − ρUσ
∂t
(15)
s + ds
in cui nei pedici si è posto in evidenza che la quantità di massa per unità di tempo entra nella
sezione posta in ascissa s ed esce dalla sezione posta in ascissa s+ds. Il flusso di massa può essere
posto in una forma più comoda, espandendo il flusso uscente in serie di Taylor di punto iniziale s:
ρσU
s + ds
=ρσU s+
∂( ρ σ U )
ds + O ds 2
∂s
s
( )
(16)
Sostituendo la (16) nella (15), dividendo per ds e facendo tendere quest’ultimo a zero si ottiene
infine l’equazione di bilancio della massa per la corrente lineare gradualmente variata:
∂( ρ σ ) ∂( ρ σ U )
+
=0
∂t
∂s
(17 )
Si assuma ora che il moto sia rigorosamente stazionario: di conseguenza le variazioni temporali del
prodotto ρ σ sono nulle. Di conseguenza la (17) assume la forma:
∂( ρ σ U )
= 0 ⇒ ρ σ U = cos t
∂s
(18)
esprimente la costanza della portata in massa attraverso le sezioni trasversali della corrente lineare
gradualmente variata. La (18) vale sia per i fluidi comprimibili (gas) che per quelli incomprimibili
(liquidi), purchè in moto stazionario.
IV.3 – Relazione costitutiva. Viscosità.
Nel formulare l’equazione di bilancio della quantità di moto è necessario fare riferimento alla
risultante delle forze agenti sul corpo fluido. Tra queste, la forza di contatto Π sarà calcolata con la
formula (4) del II capitolo, in cui lo sforzo viene espresso tramite la formula (14) del II
capitolo: φ = Φn = pn + Φ R n , in cui lo sforzo φ , agente su una superficie elementare dA definita in
seno al corpo fluido, di normale n, viene espresso tramite la somma di una parte puramente normale
( pn ), di modulo p indipendente dalla direzione di n, ed una parte ( Φ R n ), nulla nel fluido in quiete
e dipendente dalla direzione della n, a sua volta ulteriormente decomponibile in una parte normale
ed una tangenziale alla superficie dA.
In linea generale, la descrizione completa del moto di un fluido incomprimibile comporta la
determinazione di tre componenti di velocità, della pressione e delle sei componenti della matrice
dello sforzo residuo Φ R : ossia comporta la soluzione di un problema con dieci incognite
dinamiche, per il quale le equazioni di bilancio dell’Idrodinamica non sono sufficienti. E’ pertanto
necessario introdurre una opportuna relazione, detta relazione costitutiva, che leghi le componenti
della matrice degli sforzi residui Φ R al moto.
5
La relazione costitutiva viene introdotta in maniera empirica, ossia basandosi sulla osservazione dei
fatti sperimentali e deducendo da essi la forma della relazione che meglio rappresenti la realtà
fisica. Per i fluidi di comune impiego nelle applicazioni dell’Idrodinamica (acqua, olio, etc.) e della
Fluidodinamica (aria, gas, etc.) è possibile, in un campo molto ampio di condizioni di moto,
adottare come relazione costitutiva una relazione lineare ed omogenea tra le componenti della
matrice degli sforzi residui Φ R e le componenti della matrice D (definita dalle formule (9) e (10)
del III capitolo) derivante dalla decomposizione del gradiente di velocità. L’omogeneità della
relazione consiste nel fatto che all’annullarsi delle componenti di D, ossia in un fluido in quiete, le
componenti della matrice degli sforzi residui Φ R si annullano. Tale fatto rispecchia l’evidenza
sperimentale: i fluidi di comune impiego non sono in grado di opporsi a sforzi tangenziali, se questi
ultimi vengono applicati a corpi fluidi, tali corpi iniziano immediatamente a deformarsi, tanto più
rapidamente, quanto più intenso è lo sforzo tangenziale applicato: sussiste cioè una proporzionalità
tra la velocità di deformazione e lo sforzo tangenziale applicato. Tale fatto è caratteristico del
comportamento viscoso. E’ possibile sperimentare il comportamento viscoso di un fluido
allorquando si verifica un aumento dello sforzo proporzionale alla velocità di deformazione: ad
esempio lo sforzo impiegato a remare aumenta con la velocità con cui si muove il remo nell’acqua.
Un fluido che ammette una relazione costitutiva lineare ed omogenea tra le componenti della
matrice degli sforzi residui Φ R e le componenti della matrice D è detto fluido viscoso newtoniano,
in onore di Isacco Newton, che per primo osservò sperimentalmente e descrisse il comportamento
del fluido viscoso.
Vediamo ora come si perviene alla definizione della relazione costitutiva a partire dall’osservazione
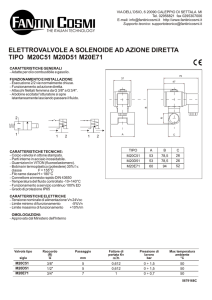
di un semplice fatto sperimentale. Si consideri un liquido, posto in un contenitore aperto. Sulla
superficie a contatto con l’atmosfera si pone una tavoletta rigida e la si trascina con velocità
costante V, diretta come l’asse delle x (figura IV.3). Variando la velocità di trascinamento V, la
superficie della tavoletta A e la profondità del liquido h, si osserva che la resistenza al trascinamento
esercitata dal fluido sulla tavoletta risulta proporzionale a V, ad A e inversamente proporzionale ad h
(purchè h sia piccolo rispetto alla dimensione caratteristica della tavoletta):
T = −µ A
V
i
h
(19)
y
Vi
T
u(y+∆y)i
∆y
h
u(y)i
x
Figura IV.3 Schema della osservazione sperimentale volta alla definizione dello sforzo viscoso.
6
Generalizzando si può dire che la resistenza al trascinamento T esercitata sullo strato posto a quota
y+∆y dallo strato posto a quota y, entrambi di superficie A, per il mantenimento della differenza di
velocità u ( y + ∆y ) − u ( y ) , sia pari a:
T = −µ A
u ( y + ∆y ) − u ( y )
i
∆y
(20)
Infine, considerando il limite per ∆y che tende a zero, si ottiene la resistenza al trascinamento
esercitata sullo strato a quota y+dy da quello a quota y, entrambi di superficie A, per mantenere
una differenza di velocità du pari a: du=u(y+dy)-u(y):
T = −µ A
du
i
dy
(21)
Lo sforzo tangenziale ϕ xy (agente sull’area di normale y in direzione x) si ottiene dividendo T per
la superficie A:
T
du
du
= ϕ xy i = − µ
i ⇒ ϕ xy = − µ
A
dy
dy
(22)
Nelle formule (19)-(22) µ è il coefficiente di viscosità. Tale coefficiente è una caratteristica fisica
del fluido, dipende essenzialmente dalla temperatura e si misura in [Nm-2s] o [Pa s]. Nei liquidi
diminuisce con l’aumentare della temperatura (l’olio fluidifica quanto viene riscaldato), mentre nei
gas aumenta all’aumentare della temperatura. Tale diversità di comportamento si spiega
considerando che all’aumentare della temperatura, a causa della maggiore mobilità degli atomi, le
forze intermolecolari diminuiscono nei liquidi, avendosi così un aumento di fluidità. Nei gas, al
contrario, l’aumento di mobilità degli atomi dovuto all’incremento di temperatura si risolve, a
livello macroscopico, in un aumento della difficoltà a scorrere esibito da parte del fluido e dunque
in un aumento di viscosità.
du
Secondo la (22), la componente di sforzo dipende linearmente dalla quantità
, che può essere
dy
1 du
messa in relazione alla componente d xy =
della matrice D:
2 dy
ϕ xy = − µ
1 du
du
= -2 µd xy
= -2 µ
dy
2 dy
(22b )
La formula (22b) può essere generalizzata: si ottiene così la cercata relazione lineare ed omogenea
tra la matrice degli sforzi residui Φ R o viscosi e la matrice D:
Φ R = −2µD
(22c)
Il segno meno nella (22c) e nelle formule precedenti indica che tale sforzo tende ad opporsi alla
deformazione del fluido. Lo sforzo viscoso agisce in seno al corpo fluido come una sorta di sforzo
di attrito interno e la potenza da esso prodotta non dà effetto utile, ma viene dissipata in calore. E’
opportuno sottolineare che la (22c) è valida nel caso di un fluido incomprimibile. Nel caso di un
7
fluido comprimibile la (22c) assume una forma diversa1, di cui però non ci si occuperà poiché nel
seguito verrà considerato esclusivamente il caso di fluido incomprimibile. Si noti che la relazione
costitutiva per il fluido viscoso newtoniano non mette in relazione gli sforzi con la matrice
antisimmetrica W: ciò è dovuto al fatto che la matrice Φ R è simmetrica e non può che essere posta
in relazione con un'altra matrice simmetrica.
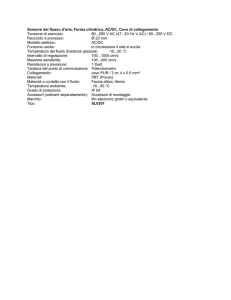
Considerando la condizione di moto illustrata in figura IV.3, si può inoltre dare un significato fisico
interessante alla componente d xy . Si faccia riferimento alla figura IV.4: nell’intervallo di tempo ∆t
lo strato a quota y+∆y ha percorso la distanza [u ( y + ∆y ) − u ( y )]∆t rispetto allo strato a quota y.
[u(y+∆y) -u(y)] ∆t
u(y+∆y)i
∆y
∆α
u(y)i
Figura IV.4 Illustrazione geometrica del significato della componente dxy
Il rapporto tra la distanza [u ( y + ∆y ) − u ( y )]∆t e ∆y è pari alla tangente dell’angolo ∆α. Come è noto,
per piccoli angoli la tangente coincide con l’angolo: tg(∆α)≈∆α. Inoltre si consideri il rapporto tra
∆α e il ∆t: quest’ultima grandezza fornisce approssimativamente la velocità angolare, con cui si
deforma il rettangolo fluido illustrato in figura IV.4:
∆α u ( y + ∆y ) − u ( y )
=
∆y
∆t
Tutte le approssimazioni fatte migliorano al tendere a zero di ∆y, ∆t . Al limite si ha:
dα du
=
dt
dy
Nel caso di fluido comprimibile la formula (22c) deve tener conto del fatto che nella matrice dello sforzo residuo Φ R
la somma degli elementi appartenenti alla diagonale principale – la traccia della matrice - è nulla per definizione
(formula (12) del II capitolo), mentre nella matrice D la somma degli elementi appartenenti alla diagonale principale è
pari a div(u) (formula (9) del III capitolo), che in generale è diversa da zero. Per evitare questa incongruenza, la
1
relazione costitutiva (22c) può essere definita nel modo seguente: Φ R = −2 µ D − div(u )I , essendo I la matrice
3
identità. Di conseguenza la traccia della matrice a secondo membro risulta identicamente nulla.
1
8
ossia il significato della derivata di u rispetto a y coincide con la variazione di α nel tempo ossia con
la velocità angolare con cui il rettangolo fluido illustrato in figura IV.4 si deforma, distorcendo la
sua forma originaria. Alla componente d xy si può pertanto dare il significato di velocità angolare di
distorsione dell’elemento fluido rettangolare i cui lati giacciano sugli assi coordinati x, y. Analogo
significato può essere dato alle componenti d ij con indici i,j diversi.
Si deve osservare che gli sforzi viscosi si possono trascurare in molte applicazioni pratiche: si suole
dire in tal caso che il fluido si comporta come fluido ideale o perfetto, in cui lo sforzo è dato perciò
dalla:
(23)
φ = pn
Nello schema di fluido ideale non si tiene conto degli sforzi tangenziali o di attrito interno: dunque
una parete non esercita sforzi tangenziali su un fluido ideale a contatto con essa che è pertanto
libero di scorrervi. Sperimentalmente tuttavia si rileva che le forze tangenziali sono di notevole
entità proprio in prossimità del contatto tra fluidi e pareti solide e che sono responsabili della
adesione del fluido alla parete. In altre parole un fluido viscoso (più realistico di un fluido perfetto)
ha velocità relativa nulla rispetto ad una parete solida e impermeabile poiché aderisce ad essa.
La relazione costitutiva (22c) è valida per un fluido in cui lo sforzo dipende dalla velocità di
deformazione in maniera lineare ed omogenea. A titolo di informazione si accenna al fatto che
esistono fluidi viscosi, non newtoniani, in cui gli sforzi viscosi variano in modo non lineare con la
velocità di deformazione e non si annullano con l’annullarsi di questa: per tali fluidi la relazione
(22c) cade ovviamente in difetto e deve essere sostituita da un’altra, che viene determinata
sperimentalmente. Esistono inoltre materiali che si comportano in maniera intermedia tra il solido
elastico e il fluido viscoso: ossia esibiscono sia caratteristiche dei fluidi viscosi che dei solidi
elastici; si parla in tal caso di fluidi visco-elastici (o di solidi elasto-viscosi), caratterizzati da
relazioni costitutive molto complesse. La parte della Meccanica dei Fluidi che si occupa della
determinazione delle relazioni costitutive è la Reologia.
IV.4 – Equazione di bilancio della quantità di moto
IV.4.1 Forma globale
Il bilancio della quantità di moto in forma globale viene formulato facendo riferimento ad un corpo
fluido incomprimibile che occupa un volume materiale V, delimitato da una superficie σ, su cui
agiscono forze di corpo, descritte dalla densità delle forze di corpo fc, e forze di contatto, descritte
dallo sforzo φ agente sulla superficie σ, dato dalla espressione φ = Φn = pn + Φ R n . n è il versore
normale alla superficie σ, con verso entrante nel volume V. Tenendo conto della relazione
costitutiva (22c), lo sforzo φ risulta dato dalla espressione:
φ = Φn = pn + Φ R n = pn − 2µDn
(24)
La densità di quantità di moto per unità di volume viene definita come il prodotto della densità di
massa del fluido per la velocità: ρu. Il bilancio della quantità di moto esprime il fatto che la
variazione temporale della quantità di moto del corpo fluido eguaglia la risultante delle forze di
corpo e di contatto agenti sul corpo fluido. In altre parole:
d
∫ ρudV = ∫ f c dV + ∫ pndσ − ∫ 2µ (D n )dσ
dt V
σ
σ
V
9
(25)
Applicando il teorema del trasporto all’integrale a primo membro della (25) nella forma definita
dalla formula (36) del I capitolo si ha, ipotizzando che il volume di controllo sia delimitato da
superfici fisse:
∂
∫ ρ udV − ∫ ρu(u ⋅ n )dσ = ∫ f c dV + ∫ pndσ − ∫ 2 µ (Dn )dσ
∂t V
V
σ
σ
σ
(26)
La (26) è la equazione di bilancio della quantità di moto in forma globale. Di solito si pone nella
forma sintetica:
I + M + Π + G = 0
I = − ∂ ρudV
∂t V∫
M = ∫ ρu(u ⋅ n )dσ
σ
Π = ∫ pndσ − ∫ 2 µ (Dn )dσ
σ
σ
G = f c dV
∫
V
(27 )
esprimente l’equilibrio dinamico istantaneo del corpo fluido con la condizione che le quattro forze
I, G, M, Π agenti sul corpo fluido abbiano risultante nulla. Il significato delle quattro forze è il
seguente:
•
•
•
•
La forza I è detta forza di inerzia locale ed è la risultante delle variazioni temporali della
quantità di moto nel volume di controllo istantaneamente coincidente con il volume
materiale;
La forza M è detta flusso della quantità di moto. E’ esercitata sul corpo fluido attraverso la
superficie di frontiera del corpo fluido. E’ chiaramente nulla sulle superfici su cui non si ha
flusso ( u ⋅ n = 0 );
La forza Π è la risultante delle forze di contatto esercitate sul corpo fluido attraverso la
superficie di frontiera;
La forza G è la risultante delle forze di corpo agenti sul corpo fluido.
IV.5.2 Forma indefinita o differenziale
Si consideri ora un elemento fluido di forma cubica, di lato l, sottoposto a forze di corpo e di
contatto (figura IV.5):
10
z
fc
ϕxz
ϕxy
ϕxx
ϕxx
ϕxy
ϕxz
l
y
ρ(du/dt)
x
Figura IV.5 Equilibrio dinamico dell’elemento fluido
Il moto dell’elemento è governato dalla seconda legge della dinamica: il prodotto della massa per
l’accelerazione eguaglia la risultante delle forze esterne applicate:
(28)
ρl 3a = F
Consideriamo le componenti cartesiane della (28):
3
ρl
3
ρl
3
ρl
du
= Fx
dt
dv
= Fy
dt
dw
= Fz
dt
(28b )
Le componenti cartesiane della accelerazione sono date dalle derivate temporali delle rispettive
componenti cartesiane della velocità (u, v, w). Le componenti cartesiane della forza F agente
sull’elemento sono date dalla somma delle componenti cartesiane delle forze di corpo e di contatto
agenti sull’elemento. Considerando per semplicità solo la direzione dell’asse x, la componente della
forza di corpo è data dalla:
(29)
f cx l 3
in cui f cx è la componente secondo l’asse x del vettore densità di forza di corpo. Più complicato
risulta il calcolo della componente delle forze di contatto. Dalla figura IV.5 si vede che, in direzione
x, agiscono le componenti di sforzo: ϕ xx ,ϕ xy ,ϕ xz rispettivamente sulle facce poste in x, x+l, y, y+l,
z, z+l. In particolare, sulle facce poste in x, x+l agisce la forza di contatto risultante:
(ϕ
xx x
− ϕ xx
x +l
)l
2
∂ϕ
∂ϕ
≈ ϕ xx − ϕ xx − xx l l 2 = − xx l 3
∂x
∂x
11
(30)
Si è evidentemente fatto uso della formula di Taylor per esprimere la componente dello sforzo in
x+l. Analogamente si ha per la forza di contatto risultante che agisce sulle facce poste in y, y+l, z,
z+l:
(
)
(
)
∂ϕ xy 2
∂ϕ xy 3
2
l l = −
l
ϕ xy y − ϕ xy y +l l ≈ ϕ xy − ϕ xy −
∂y
∂y
∂ϕ xz 2
∂ϕ
ϕ −ϕ
2
l l = − xz l 3
xz z + l l ≈ ϕ xz − ϕ xz −
xz z
∂z
∂z
(31)
La componente secondo x della forza esterna, somma delle forze di corpo e di contatto, agente
sull’elemento è dunque data dalla:
(
Fx = f cxl 3 + ϕ xx x − ϕ xx
x +l
)l
2
(
+ ϕ xy − ϕ xy
y
y +l
)l
2
(
+ ϕ xz z − ϕ xz
z +l
)l
2
= f cxl 3 −
∂ϕ xx 3 ∂ϕ xy 3 ∂ϕ xz 3
l −
l −
l
∂x
∂y
∂z
Applicando la prima delle (28b), dividendo tutto per l 3 e facendo tendere l a zero, si ottiene la
componente secondo l’asse x della equazione del bilancio della quantità di moto in forma
indefinita:
ρ
∂ϕ xy ∂ϕ xz
∂ϕ
du
= f cx − xx +
+
dt
x
y
∂
∂
∂z
(32)
Procedendo analogamente per le componenti secondo gli assi x,z si ottiene:
ρ
ρ
∂ϕ yx ∂ϕ yy ∂ϕ yz
dv
= f cy −
+
+
dt
x
y
z
∂
∂
∂
∂ϕ zy ∂ϕ zz
∂ϕ
dw
= f cz − zx +
+
∂
∂
∂
dt
x
y
z
(33)
Le equazioni (32) e (33) possono essere poste in una forma estremamente significativa sostituendo
ad ogni componente ϕ ij la corrispondente data dalla formula (13) del II capitolo: Φ = pI + Φ R . Si
ottiene:
ρ
ρ
ρ
R
du
∂p ∂ϕ xxR ∂ϕ xy ∂ϕ xzR
= f cx −
−
+
+
dt
∂x ∂x
∂y
∂z
R
R
R
dv
∂p ∂ϕ yx ∂ϕ yy ∂ϕ yz
= f cy −
−
+
+
dt
∂y ∂x
∂y
∂z
R
dw
∂p ∂ϕ zxR ∂ϕ zy ∂ϕ zzR
= f cz −
−
+
+
dt
∂z ∂x
∂y
∂z
(34)
in cui si separano i contributi delle forze di contatto dovuti alla pressione e quelli dovuti agli sforzi
residui. Nei termini tra parentesi tonde nei secondi membri delle (34) compaiono gli elementi della
matrice Φ R . Sostituendo per tali elementi le rispettive espressioni date dalla relazione costitutiva
12
(22c) si ottengono le componenti secondo gli assi cartesiani dell’equazione di bilancio della
quantità di moto per i fluidi viscosi newtoniani incomprimibili, nota come equazione di NavierStokes per fluidi incomprimibili:
ρ
ρ
ρ
∂ 2u ∂ 2u ∂ 2u
du
∂p
= f cx −
+ µ 2 + 2 + 2
dt
∂x
∂y
∂z
∂x
∂ 2v ∂ 2v ∂ 2v
dv
∂p
= f cy −
+ µ 2 + 2 + 2
dt
∂y
∂y
∂z
∂x
(35)
∂2w ∂2w ∂2w
dw
∂p
= f cz −
+ µ 2 + 2 + 2
dt
∂z
∂y
∂z
∂x
Si sottolinea il fatto che le derivate temporali delle componenti di velocità a primo membro sono
derivate totali o sostanziali: possono essere pertanto esplicitate applicando la formula (29) del I
capitolo in cui al posto della f compaia la componente di velocità considerata.
Nel caso in cui la densità di forza di corpo coincida con la sola densità di forza peso e si considerino
fluidi ideali, ossia nel caso in cui si possano trascurare gli sforzi viscosi, si ha l’equazione di
Eulero, sinteticamente espressa in forma vettoriale dalla:
ρ
du
= − ρgk − grad( p )
dt
(36)
essendo k il versore dell’asse z, verticale, rivolto verso l’alto. Introducendo il potenziale delle forze
gravitazionali e la definizione di quota piezometrica (formula (11), capitolo II), la (36) può essere
posta nella forma:
du
p
= − ggrad(ζ )
= − ggrad z +
ρg
dt
(37 )
E’ interessante osservare che, nell’ambito dei fluidi incomprimibili, l’equazione di bilancio della
massa e della quantità di moto in forma indefinita, consentono, grazie alla introduzione della
relazione costitutiva, la determinazione delle tre componenti di velocità e della pressione in tutti i
punti occupati dal fluido in movimento, assegnate ovviamente le forze esterne di corpo, le
condizioni iniziali e al contorno. L’equazione di bilancio della quantità di moto è infatti una
equazione vettoriale, le cui componenti scalari (35), unite alla equazione di bilancio della massa
(14), costituiscono un sistema di equazioni in numero pari al numero di incognite: le tre componenti
di velocità e la pressione.
IV.6 Proiezione dell’equazione di Eulero sulla terna intrinseca. Teorema
di Bernoulli.
Si consideri la traiettoria di un elemento fluido; sia P il punto appartenente ad essa, occupato
dall’elemento fluido. Si definisce terna intrinseca2 (figura IV.6) la terna cartesiana ortogonale
avente origine in P, definita dai versori τ, tangente alla traiettoria ed avente direzione coincidente e
verso concorde con la velocità; n, normale al versore tangente e alla traiettoria e rivolto verso il
centro di curvatura, ossia verso il centro del cerchio che approssima la traiettoria nell’intorno di P,
detto cerchio osculatore, di raggio R, e b, binormale, definito in direzione e verso dal prodotto
2
Si consulti a tal proposito il testo: Dispense per il corso di Meccanica Razionale, a cura del Prof. U. Iemma, Cap. 1, pp
3-5.
13
vettoriale dei primi due: b=τ × n. Si consideri ora la derivata sostanziale del vettore velocità
dell’elemento fluido, espressa come il prodotto del modulo della velocità per il versore tangente:
u = uτ . Nel calcolare tale derivata si deve tener conto del fatto che il versore tangente varia
direzione al variare del tempo poiché l’elemento fluido si sposta sulla traiettoria. In altre parole,
detta s=s(t) l’ascissa curvilinea individuata sulla traiettoria, si avrà: τ = τ[s(t )] . Pertanto:
du duτ du
dτ du
dτ ds du
u2
=
=
τ+u
=
τ+u
=
τ+
n
dt
dt
dt
dt dt
ds dt dt
R
(38)
nella (38) si è tenuto conto del fatto che la derivata del versore tangente rispetto alla ascissa
dτ n 3
curvilinea vale
=
e che la variazione rispetto al tempo della ascissa curvilinea percorsa sulla
ds R
traiettoria è pari al modulo della velocità:
ds
=u.
dt
Se si proietta l’accelerazione sugli assi della terna intrinseca si ottiene pertanto:
du
du
dt ⋅ τ = dt
u2
du
n
⋅
=
R
dt
du
dt ⋅ b = 0
(39)
D’altra parte, proiettando il secondo membro della equazione di Eulero (37) secondo le direzioni
della terna intrinseca e tenendo conto del fatto che la proiezione del gradiente di uno scalare in una
τ
b
P
n
R
O
Figura IV.6 Elementi geometrici della terna intrinseca
certa direzione fornisce la derivata dello scalare secondo quella direzione, si ha infine:
3
Dispense per il corso di Meccanica Razionale, a cura del Prof. U. Iemma, Cap. 1, p. 4.
14
∂ζ
du
dt = − g ∂s
2
∂ζ
u
= −g
∂n
R
∂ζ
0 = − g ∂b
(40)
essendo s,n,b le coordinate identificate sulle rispettive direzioni della terna intrinseca. Le (40) sono
le componenti della equazione di Eulero secondo le direzioni degli assi della terna intrinseca. La
prima di esse può essere posta in una forma assai significativa:
∂u
∂
u2
= − g ζ +
∂
∂
2
t
s
g
u 2
∂ζ
= −g
∂n
R
∂ζ
0 = − g ∂b
(41)
Avendo espresso la derivata sostanziale del modulo della velocità, nella direzione della traiettoria
du ∂u
∂u ∂u ∂ u 2
come:
=
+u
=
+ . La proiezione della equazione di Eulero sulla terna
dt ∂t
∂s ∂t ∂s 2
intrinseca fornisce pertanto le seguenti informazioni:
1. la quota piezometrica è costante in direzione binormale alla traiettoria;
2. la quota piezometrica diminuisce verso il centro di curvatura della traiettoria in
misura tanto maggiore, quanto minore è il raggio di curvatura;
1
= 0 , cosa che accade nelle
R
traiettorie rettilinee, la quota piezometrica è costante anche in direzione normale alla traiettoria.
L’ultimo risultato è di particolare interesse nello studio delle correnti lineari, gradualmente variate.
In tal caso infatti le traiettorie sono sensibilmente rettilinee e parallele tra loro. Ne segue che la
quota piezometrica, dovendo essere costante rispetto alle direzioni, n, b, linearmente indipendenti,
risulta costante sul piano individuato da tali direzioni ossia sulle sezioni perpendicolari alla
direzione tangente τ: di conseguenza su queste sezioni si ha una distribuzione idrostatica delle
pressioni (Fig. IV.7).
Nel caso particolare in cui la traiettoria abbia curvatura nulla:
15
p=0
h1
p1=ρ g h1
ζ =cost
h2
b
p2=ρ g h2
n
τ
Figura IV.7 Distribuzione idrostatica delle pressioni sui piani perpendicolari alla direzione tangente nelle correnti
lineari
Nella figura IV.7 si mette in evidenza il fatto che sulle sezioni perpendicolari alla direzione
tangente, la pressione aumenta linearmente con l’affondamento rispetto al piano dei carichi della
sezione. La posizione di tale piano può però cambiare da sezione a sezione.
Si supponga ora che il moto sia permanente. Le traiettorie coincidono con le linee di flusso e dalla
∂u
prima delle (41), poiché si annulla identicamente il termine a primo membro,
= 0 , segue che:
∂t
∂
u2
u2
= 0 ⇒ ζ +
ζ +
= cost
2g
2g
∂s
(42)
ove la costante a secondo membro si deve intendere tale sulla linea di flusso considerata, ma può
variare da una linea di flusso all’altra. La formula (42) costituisce il nucleo del teorema di
Bernoulli il cui enunciato può essere così formulato: nel moto permanente di un fluido ideale,
u2
incomprimibile, la quantità H = ζ +
è costante sulle linee di flusso. La quantità H,
2g
dimensionalmente omogenea ad una lunghezza, è definita carico idraulico e rappresenta
l’energia per unità di peso dell’elemento fluido.
Il teorema di Bernoulli è un teorema di conservazione dell’energia per l’elemento di fluido ideale
incomprimibile in moto permanente ed esprime il fatto che, esplicitando la definizione di quota
p
piezometrica ζ = z +
, la somma dei tre contributi all’energia per unità di peso:
ρg
1. energia di posizione o altezza geodetica:
z
2. energia di pressione o altezza di pressione:
p
ρg
3. energia cinetica o altezza cinetica:
u2
2g
16
si mantiene costante sulla traiettoria seguita dall’elemento fluido considerato. L’energia per unità di
peso è dimensionalmente omogenea ad una lunghezza e si misura in metri. Per questo i termini
costituenti il carico idraulico vengono anche designati come altezze. Riportando sulla verticale, per
ogni punto della traiettoria, la somma delle tre altezze a partire dalla linea di riferimento
orizzontale, posta a quota z=0, si ottiene una linea orizzontale detta linea del carico idraulico. La
linea piezometrica si trova al di sotto della linea del carico idraulico, ad una distanza pari all’altezza
cinetica. La linea piezometrica aumenta o diminuisce la sua quota in corrispondenza di diminuzioni
o aumenti dell’altezza cinetica (Figura IV.8)
linea del carico idraulico
u12
2g
p1
ρg
H=cost
u22
2g
u32
2g
p2
ρg
p3
ρg
z2
z3
linea piezometrica
linea di flusso
z1
z=0
Figura IV.8 Rappresentazione grafica del teorema di Bernoulli
IV.7 Bilancio della quantità di moto per la corrente lineare.
Si consideri ora il bilancio della quantità di moto per un tronco infinitesimo di tubo di flusso (figura
IV.9). A tale scopo si adottino le seguenti ipotesi:
•
•
•
•
•
si considera un volume elementare di tubo di flusso;
la sezione trasversale del tubo è praticamente costante;
le linee di flusso contenute nel volumetto sono sensibilmente parallele all’asse del tubo e
hanno curvatura nulla o trascurabile (si assume costante la piezometrica sulle sezioni
trasversali);
gli sforzi tangenziali agiscono sulla superficie laterale del tubo e si oppongono al moto;
le forze di corpo coincidono con la sola forza peso;
Si applichi ora la (27) al volume elementare σ ds e la si proietti nella direzione dell’asse del tubo,
individuata dal versore e s :
17
∂
∂
I ⋅ e s = − ∫ ρ udσ ⋅ e s ds = − (ρ σU )ds
∂t σ
∂t
M ⋅ e = ρ u(u ⋅ n )dσ ⋅ e +
⋅ es =
(
)
⋅
ρ
σ
u
u
n
d
s
s
∫
∫
σ (s )
σ (s + ds )
2
2
= − ∂ β c ρU σ ds
ρ u 2 dσ −
ρ
σ
u
d
∫
σ ∫( s )
∂s
σ (s + ds )
Π ⋅ e s = ∫ pndσ ⋅ e s + ∫ pndσ ⋅ e s − ∫ τ l e s dσ ⋅ e s =
σ
σ (s )
σ ( s + ds )
l
∂pc
σds − τ l C ds
∫ pdσ − ∫ pdσ − ∫ τ l dσ = −
∂
s
σ ( s )
σ ( s + ds ) σ l
G ⋅ e s = ρgσ cos(θ )ds = − ρgσ dz ds
ds
(
)
(44)
Nel calcolo del termine M ⋅ e s si deve tener conto che la normale n è sempre entrante e che la
velocità u ha verso concorde con e s ossia con n sulla superficie trasversale di ingresso e opposto ad
n sulla superficie trasversale di uscita. Si è fatto inoltre uso della seguente
posizione: ∫ u 2 dσ = β cU 2σ tramite la quale si rapporta l’integrale del quadrato del modulo della
σ (s )
velocità sulla sezione al prodotto del quadrato della velocità media per l’area della sezione
tramite il coefficiente β c detto di ragguaglio della portata di quantità di moto. Tale coefficiente
permette di svincolarsi dal reale andamento del profilo di velocità sulla sezione e di far riferimento
alla velocità media. β c viene determinato sperimentalmente. Di solito nelle applicazioni idrauliche
viene posto pari ad 1, valore che viene effettivamente riscontrato nella maggior parte dei casi di
interesse tecnico. Nel seguito, ove diversamente non indicato, si seguirà tale scelta.
Nel calcolo del termine Π ⋅ e s si è fatto riferimento alla pressione pc, calcolata nel centro di figura
della sezione, stante il fatto che la piezometrica è costante sulla sezione e dunque che la
distribuzione della pressione sulla sezione trasversale è di tipo idrostatico. Il termine
∫ τ l dσ = τ l C ds tiene conto dell’azione esercitata sulla corrente dall’esterno attraverso la superficie
σl
laterale Cds, essendo C il contorno o perimetro della sezione σ . Si tratta ovviamente di una azione
diretta tangenzialmente alla corrente e tale da opporsi al moto.
Il termine G ⋅ e s viene espresso in funzione della diminuzione di quota, esprimendo il coseno
dell’angolo formato dalla direzione della forza peso con la direzione del moto della corrente come
l’opposto del rapporto della differenza di quota sulla distanza misurata sull’asse della corrente:
dz
cos(θ ) = −
Il segno negativo si rende necessario, in quanto la forza peso favorisce il moto se la
ds
dz
dz
direzione del moto è declive ( < 0 ), si oppone al moto nel caso opposto( > 0 ).
ds
ds
Riunendo i vari termini e dividendo per ds, si ha:
(
)
2
∂
(ρ σU ) + ∂ ρU σ = − ∂pc σ − τ l C − ρgσ dz
ds
∂t
∂s
∂s
18
(45)
che, con alcune semplici trasformazioni e tenendo conto della equazione di conservazione della
massa per le correnti (formula (17)), si può scrivere nella forma:
dz 1 ∂pc
∂U
∂U
+U
= − g +
∂t
∂s
ds ρg ∂s
τl C
−
ρσ
(46)
La (46) è la equazione di bilancio della quantità di moto per le correnti gradualmente variate. Per
fluidi incomprimibili, ricordando la definizione di quota piezometrica, si ha:
τ
∂U
∂U
∂ζ
+U
= −g
− l
∂t
∂s
∂s ρℜ
La grandezza ℜ =
(47 )
σ
è il rapporto tra la sezione occupata dalla corrente e il suo perimetro. ℜ è
C
dimensionalmente omogeneo ad una lunghezza ed è definito raggio idraulico.
Si deve notare che la quota piezometrica, nel caso delle correnti lineari gradualmente variate, stante
il parallelismo e la trascurabile curvatura delle traiettorie, è costante sulle sezioni trasversali ed è
pertanto univocamente definita per ogni sezione. Si può infatti definire come piezometrica della
corrente il valore calcolato in base alla quota e alla pressione nel centro di figura. Ha pertanto senso
parlare di linea piezometrica della corrente. Se viceversa vi fossero curvature non trascurabili delle
traiettorie o sensibili deviazioni dal parallelismo, si avrebbero differenze di piezometrica sulla
singola sezione, con la conseguenza di non poter calcolare la pressione su quest’ultima in base alla
distribuzione idrostatica e di non poter individuare una linea piezometrica della sezione avente
particolare significato.
IV.8 Bilancio della energia cinetica per la corrente lineare.
Il teorema di Bernoulli esprime la costanza del carico idraulico sulle traiettorie, nel moto
permanente di un fluido ideale incomprimibile. Nelle applicazioni tecniche che riguardano lo
scambio energetico tra le correnti e l’ambiente esterno è però necessario disporre di una
formulazione del teorema di Bernoulli che tenga conto della dissipazione di energia,
inevitabilmente presente in tutti i processi di moto dei fluidi reali. A tal proposito è opportuno
considerare il bilancio di energia cinetica in forma globale, utilizzando la forma del teorema del
trasporto fornita dalla formula (35) del I capitolo, in cui gli integrali siano estesi al volume di
controllo coincidente con il volume dell’elemento di corrente lineare illustrato in figura IV.9. A tal
proposito valgono tutte le ipotesi precedentemente fatte per il bilancio di quantità di moto e di
seguito richiamate per comodità:
•
•
•
•
•
si considera un volume elementare di tubo di flusso;
la sezione trasversale del tubo è praticamente costante;
le linee di flusso contenute nel volumetto sono sensibilmente parallele all’asse del tubo e
hanno curvatura nulla o trascurabile (si assume costante la piezometrica sulle sezioni
trasversali);
gli sforzi tangenziali agiscono sulla superficie laterale del tubo e si oppongono al moto;
le forze di corpo coincidono con la sola forza peso;
alle quali si aggiunge esplicitamente l’ipotesi di incomprimibilità:
•
la densità è costante.
19
Il bilancio di energia cinetica si effettua eguagliando la variazione rispetto al tempo dell’energia
cinetica dell’elemento di corrente alla potenza sviluppata dalle forze agenti sull’elemento:
∂
u2
u2
u2
∫ ρ dσ ds − ∫ ρ (u ⋅ n )dσ − ∫ ρ (u ⋅ n )dσ =
∂t σ 2
2
2
σ (s )
σ ( s + ds )
(48)
pu ⋅ ndσ + ∫ pu ⋅ ndσ − ∫ ρg u ⋅ kdσ ds − Pτ ds
∫
σ( )
σ(
)
σ
l
s + ds
s
U
- τ l es
pσ n
ds
θ
- τ l es
pσ n
z
-ρ g k
z+(dz/ds) ds
Figura IV.9 L’elemento di corrente per il bilancio di quantità di moto ed energia cinetica
in cui Pτ l è la potenza sviluppata dagli sforzi tangenziali per unità di lunghezza della corrente. Tale
potenza è priva di effetto utile e deve essere considerata come potenza dissipata. Tenendo conto del
fatto che il prodotto scalare u ⋅ n vale ± u , valendo il segno + sulla superficie di ingresso e – su
dz
quella di uscita, e che − u ⋅ k vale − u ⋅ k = u cos(θ ) = −u
(vedi figura IV.9) - avendo la forza peso
ds
un effetto motrice per una corrente declive nel verso del moto – i termini integrali che appaiono
nella (48) assumono la forma:
20
u2
u2
u3
u3
u3
∂
(u ⋅ n )dσ − ∫ ρ (u ⋅ n )dσ = ∫ ρ dσ − ∫ ρ dσ = ∫ ρ dσ ds
− ∫ ρ
2
2
2
∂s σ ( s ) 2
σ (s ) 2
σ ( s + ds )
σ ( s + ds )
σ (s )
∂
∫ pu ⋅ ndσ + ∫ pu ⋅ ndσ = ∫ pudσ − ∫ pudσ = − ∫ pudσ ds
∂s σ ( s )
σ ( s + ds )
σ (s )
σ ( s + ds )
σ ( s )
− ρg u ⋅ kdσ ds = − ρg u dz dσ ds = − ∂ ρg uzdσ ds
∫
∫
ds
∂s σ∫
σ
σ
(48b )
Gli integrali calcolati sulle sezioni in s e in s+ds sono stati sviluppati in serie di Taylor di punto
iniziale s, arrestandosi al primo ordine. Di conseguenza l’equazione (48) assume la forma:
∂
∂
u3
u2
∫ ρ dσ ds = − ∫ ρ dσ + ∫ pudσ + ∫ ρg u z dσ ds − Pτ ds
l
∂t σ 2
∂s σ 2
σ
σ
(49)
Dividendo per ds si ottiene l’equazione di bilancio dell’energia cinetica per la corrente lineare:
∂
u2
∂
u3
∫ ρ
= − ∫ ρ dσ + ∫ pudσ + ∫ ρg u z dσ − Pτ
d
σ
l
∂t σ 2
∂s σ 2
σ
σ
(50)
che nel caso di moto permanente fornisce (facendo comparire la quota piezometrica ζ = z +
ρg
d u3
dσ + ∫ ζudσ = − Pτ l
∫
ds σ 2 g
σ
p
):
ρg
(51)
Dei due integrali a primo membro il secondo si calcola immediatamente, ricordando che nelle
correnti lineari la piezometrica è costante sulle sezioni trasversali:
(52)
∫ ζudσ = ζUσ = ζQ
σ
Per calcolare il primo integrale a secondo membro della (51) si dovrebbe conoscere la reale
distribuzione del modulo della velocità sulla sezione. Si può però far riferimento alla velocità media
U con l’introduzione del coefficiente αc di ragguaglio della potenza cinetica, così definito:
∫ u dσ
σ
3
∫σ u dσ = α U σ
3
3
c
⇒ αc =
U 3σ
(53) .
Come per il coefficiente βc di ragguaglio della quantità di moto, αc è definito sperimentalmente.
Nella maggior parte delle applicazioni, le misure sperimentali rivelano che il suo valore si discosta
di poco dall’unità. Tuttavia, come per il valore di βc, vi possono essere delle circostanze in cui il
valor unitario dei coefficienti di ragguaglio non sia corretto. In definitiva la (51) assume la forma:
21
dH c
d U2
ρ
αc
+ ζ = ρgQ
= − Pτ l
gQ
ds 2 g
ds
2
H = α U + ζ
c
c
2g
(54)
in cui si è portato fuori della parentesi la portata volumetrica, che, per un fluido incomprimibile in
moto permanente, resta costante. La (54) si può considerare l’estensione del teorema di Bernoulli
alle correnti lineari di fluidi incomprimibili reali, in moto permanente. Hc è il carico della
corrente lineare definito facendo riferimento alla piezometrica ζ e alla altezza cinetica della
U2
e rappresenta l’energia specifica (per unità di peso) della corrente. Si deve notare
2g
a secondo membro la presenza della potenza generata dagli sforzi tangenziali. Tale potenza può
essere posta in relazione allo sforzo tangenziale agente sulla superficie laterale dell’elemento fluido
nel modo seguente:
corrente α c
(55)
Pτ l ds = τ lUCds ⇒ Pτ l = τ lUC
ossia come il prodotto dello sforzo tangenziale agente sulla superficie laterale infinitesima Cds per
la velocità media U. In tal modo si può porre la (54) nella forma:
Pτ
τ CU
τ
dH c
=− l =− l
=− l
ρgQ
ρgUσ
ρgℜ
ds
(56)
Si deve notare che l’estensione del teorema di Bernoulli al caso di una corrente di fluido reale
incomprimibile porta a concludere che: nel moto permanente di una corrente lineare di un fluido
reale incomprimibile il carico idraulico diminuisce nel verso del moto per l’azione delle forze
tangenziali di contatto esercitate sul contorno laterale della corrente.
Poiché Hc rappresenta l’energia per unità di peso della corrente, la quantità:
℘ = ρgQH c
(57 )
è la potenza associata alla corrente, quantità decrescente con continuità nel verso del moto, secondo
la (54). Tuttavia, se in corrispondenza di determinate sezioni della corrente, sono inseriti dispositivi
o macchine tali da assorbire dalla corrente (turbine, valvole dissipatrici) o da cedere alla corrente
(pompe) determinate quantità di carico ∆H, la potenza complessivamente ceduta o assorbita è pari
a:
℘m = ρgQ∆H
(58)
La formula (58) è di notevole importanza perché permette di valutare la potenza scambiata tra la
corrente e la macchina. Se la macchina è una turbina, la potenza℘m viene estratta dalla corrente e
trasformata, a meno delle inevitabili perdite, in energia elettrica. Se la macchina è una pompa la
potenza℘m viene ceduta alla corrente e trasformata in energia di posizione e di pressione.
22