Istituto per i Processi Chimico-Fisici
U.O.S. di COSENZA
VOUCHER TECNOLOGICI E PROGETTI DI
RICERCA COPERATIVA PER LE PICCOLE E
MEDIE IMPRESE CALABRESI
POR Calabria 2000-2006 Misura 3.16
REPORT
Progettazione del sistema ottico ed optoelettronico e
verifica dell’elettronica di controllo finalizzato allo
sviluppo di un innovativo sistema di allarme antiintrusione INTELLICONTROL
ING. G. LOMBARDO
IPCF UOS di Cosenza - c/o Universita’ della Calabria – Dip. Di Fisica -Ponte P. Bucci- Cubo 31/C – 87036 Rende (CS)
0984/496007-496008 Fax 0984/494401
Codice Fiscale 80054330586 – partita IVA IT02118311006
1
INDICE
1.
INTRODUZIONE ......................................................................3
2.
MODULO DI TRASMISSIONE.................................................7
2.1.
Sorgente Laser IR...............................................................................................7
2.2.
Ottica di collimazione Laser ................................................................................8
2.2.1. Scelta della lente di collimazione per diodo laser................................................9
2.3.
3.
4.
Driver di pilotaggio ed alimentazione Laser ......................................................11
MODULO DI RICEZIONE ......................................................12
3.1.
Photodiodo di ricezione a valanga sensibile IR.................................................12
3.2.
Elettronica di alimentazione photodiodo ...........................................................13
3.3.
Elettronica di condizionamento del segnale di ricezione...................................13
3.4.
Ottica di Ricezione ............................................................................................15
TEST FINALE ........................................................................16
2
1.
INTRODUZIONE
La società Innova Tecnology Solutions srl, sta sviluppando un sistema di
allarme volumetrico, denominato INTELLICONTROL, capace di generare un
allarme quando il volume monitorato viene violato da un evento di intrusione.
Il dispositivo è costituito principalmente da un sistema opto-elettronico di
trasmissione e ricezione di impulsi laser in classe 1 (eye-safe) che permette
di rilevare gli eventi di intrusione che penetrano all’interno del campo di
azione del laser. Il principio di funzionamento del dispositivo, che si basa su
un algoritmo di calcolo detto a tempo di volo (Time of Flight), è caratterizzato
da un fascio laser che scandisce il volume controllato e misura la distanza e
la dimensione degli oggetti presenti. Ogni variazione relativa di questa misura
produce un evento che il sistema elabora e deciderà all’’istante se è di
allarme o no. Il sistema, quindi, è capace di localizzare non solo l’oggetto di
intrusione ma di determinare anche la sua dimensione, la traiettoria e la
velocità di spostamento.
Tale innovazione permette al sistema INTELLICONTROL di distinguersi
dagli attuali sistemi di allarme commerciali che si basano esclusivamente sul
principio “on-off”. Infatti, quale che siano la tecnologia in uso, ad infrarossi, a
micro-onde oppure barriere perimetrali etc , i sistemi attuali generano solo un
allarme in risposta ad una variazione del loro stato e non sono in grado di
determinare la posizione, la dimensione, la traiettoria e la velocità dell’oggetto
che si è introdotto nell’area monitorata.
Le specifiche del dispositivo sono:
Campo di azione: settore sferico di 90° di larghezza, 60° di altezza e
profondo fino ad un massima distanza di 30m;
Sorgente laser: classe 1 (eye-safe)
3
Funzionamento: il dispositivo funziona sotto qualsiasi condizione
ambientale e cioè anche in presenza di pioggia, vento e neve.
Elaborazione in tempo reale degli eventi di intrusione: la scansione
viene aggiornata ogni secondo
Modularità: il dispositivo presenta una struttura modulare che consente
l'installazione di più dispositivi cooperanti fra loro allo scopo di
monitorare volumi complessi.
Personalizzabile: l’utente finale può personalizzare il volume monitorato
andando ad impostare zone free “allarm”.
Upgrade: Il dispositivo è predisposto per un suo aggiornamento sia
Hardware che Software per sviluppi futuri.
INTELLICONTROL, per esigenze progettuali, è stato suddiviso nei seguenti
moduli funzionali:
MODULO DI TRASMISSIONE FASCIO LASER
MODULO DI DEFLESSIONE FASCIO LASER
MODULO DI RICEZIONE FASCIO LASER
MODULO CALCOLO TEMPO DI VOLO
MICROPROCESSORE
In figura 1.1 è schematizzato il diagramma a blocchi in cui è stato suddiviso il
dispositivo.
4
INTELLICONTROL
MODULO DI
TRASMISSIONE FASCIO
LASER
MODULO CALCOLO
TEMPO DI VOLO
INTERFACCIA UTENTE
MICROPROCESSORE
MODULO DI DEFLESSIONE
FASCIO LASER
MODULO DI RICEZIONE
FASCIO LASER
FIG. 1.1
Una serie di impulsi laser viene generata dal modulo di trasmissione la quale,
è deflessa da un sistema di specchi, scansionando il volume di interesse. In
tal modo, gli impulsi, dopo esser riflessi dagli oggetti presenti all’interno del
volume scansionato, vengono rilevati dal modulo di ricezione. Il modulo
calcolo tempo di volo calcola l’intervallo di tempo (dt) che intercorre tra
l’istante di tempo di emissione degli impulsi laser e l’istante di ricezione degli
stessi. Dalla misura dell’intervallo di tempo dt, si risala attraverso la semplice
relazione 2*ds=c*dt (1.1), alla distanza ds che gli oggetti hanno rispetto al
dispositivo Intellicontrol ed attraverso opportuni algoritmi matematici,
implementati via software dal microprocessore, si riesce ad ottenere
informazioni aggiuntive sulla dimensione degli oggetti, sulla velocità e sulla
traiettoria descritta. Il microprocessore è il cuore del dispositivo di allarme, il
quale svolge le seguenti attività:
Gestione principale delle funzioni del processore
Gestione parametri dei moduli specificati
Elaborazione dati proveniente dal modulo tempo di volo
Gestione interfaccia Intellicontrol – Utente per la personalizzazione del
sistema di allarme
5
INNOVA Tecnology Solutions ha richiesto la consulenza tecnico scientifica al
CNR-IPCF UOS di CS per la progettazione dei MODULI DI TRASMISSIONE
E RICEZIONE DEL FASCIO LASER. Dalla relazione (1.1), ricordando che la
velocità della luce è c=3x108 m/s, si ha che per distinguere oggetti fino alla
distanza di 30 metri è necessario che il sistema opto-elettronico di
trasmissione e ricezione degli impulsi laser abbia una risoluzione temporale
dell’ordine dei ns. Inoltre è necessario che il fascio laser sia in classe 1
(lunghezza d’onda infrarossi) sia ben collimato ed abbia una potenza di picco
trasmissione tale che la radiazione riflessa dagli oggetti presenti sulla scena
monitorata superi la soglia di rumore (dark current) tipica dei photodiodi
sensibili.
Nelle sezioni seguenti verranno descritte le soluzioni trovate per la
progettazione dei MODULI DI TRASMISSIONE E RICEZIONE ed nell’ultima
sezione verranno mostrati i dispositivi realizzati ed un test di misura.
6
2.
MODULO DI TRASMISSIONE
2.1. Sorgente Laser IR
La sorgente laser deve essere scelta in modo tale da soddisfare alle seguenti richieste:
Classe 1 (eye safe)
Il modulo di ricezione deve poter ricevere un segnale riflesso da un oggetto distante
al più di 30 metri
Il modulo di ricezione deve poter ricevere un segnale riflesso sotto condizioni
climatiche differenti (pioggia, vento, neve)
Per il coretto dimensionamento della sorgente laser che soddisfa alle caratteristiche sopra
menzionate, deve soddisfare all’equazione di trasmissione-ricezione di un segnale in
presenza di un ostacolo (Equazione radar), secondo cui, sotto l’ipotesi di diffusione
lambertiana del segnale ottico riflesso, abbiamo che la potenza ricevuta PR al fotodiodo è:
ρ * M 2 * Ar * PT
PR =
2* π * R2
(2.1)
dove si è schematizzato con ρ la riflettenza della superficie dell’ostacolo, con M il
coefficiente atmosferico, Ar è l’area della superficie di raccolta del segnale, PT è la potenza
di picco trasmessa ed R è la distanza dell’ostacolo dal trasmettitore. Quindi, tramite
l’equazione (2.1), si cerca la potenza di trasmissione PT minima necessaria al fotodiodo
per rilevare un segnale ottico PR, riflesso da ostacoli distanti almeno 30 metri, e capace di
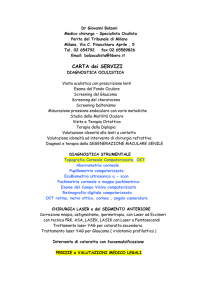
generare una corrente avente una soglia maggiore della corrente di buio. In figura 2.1 è
mostrato la potenza di trasmissione PT al variare della distanza dell’ostacolo R utilizzando
i seguenti parametri:
ρ = 0.2
M = 0.2
Diametro lente di ricezione = 55 mm -> Ar =24 cm2
Id = 1 μA (corrente minima richiesta per generare una foto corrente maggiore della
corrente di buio)
Responsivity = 50 A/W (Guadagno del foto-detector)
PR = Id / Responsivity = 20nW;
7
FIG. 2.1
Dalla FIG. 2.1 si deduce che il diodo laser deve possedere almeno una potenza di picco di
6 Watt. Inoltre poiché deve essere di classe 1, deve essere un diodo laser pulsato con
lunghezza d’onda di 905 nm (Infrarosso). A questo scopo si sono trovati due diodi laser a
multi-giunzione che soddisfano tale richiesta:
•
Diodo laser pulsato infrarosso: 905d1s03ua (Laser Components) con potenza di
picco 6 W, ampiezza giunzione 75 μm x 1μm e divergenza 20°x10° (FWHM –
FULL WIDTH HALF MAXIMUM)
•
Diodo laser pulsato infrarosso: 905d1s3j03ua (Laser Components) con potenza di
picco 25 W, ampiezza giunzione 85 μm x 10μm e divergenza 20°x10° (FWHM –
FULL WIDTH HALF MAXIMUM)
•
Diodo laser pulsato infrarosso CVD65 (Laser Diode Incorporated) con potenza di
picco 13W, ampiezza giunzione 254μm x 2μm e divergenza 30°x10° (FWHM –
FULL WIDTH HALF MAXIMUM)
2.2. Ottica di collimazione Laser
Le lenti sferiche tradizionali hanno una forma semplice che può essere descritta come
l'arco di un cerchio ed hanno solo un raggio di curvatura. Sebbene questo tipo di lenti
siano semplici da realizzare ed al tempo stesso economiche, sono affette dal problema
noto come aberrazione sferica. Questo difetto è dovuto alla natura della forma sferica, la
quale non risulta essere la forma ideale per una lente che debba focalizzare o collimare la
luce. Il caso ideale consiste in una forma più complessa che è definita solitamente
utilizzando un raggio di curvatura variabile ed un indice di asfericità. Tali ottiche sono le
cosiddette le lenti asferiche che permettono la correzione delle aberrazioni sferiche. Ciò
fornisce una migliore qualità al fascio per le applicazioni di collimazione, uno spot più
8
piccolo nel caso di focalizzazione, ed un'immagine di qualità superiore per applicazioni di
imaging. Infatti, in molti casi una singola lente asferica può sostituire un intero sistema di
lenti sferiche, dando vita ad un sistema ottico più performante e compatto, ma anche più
leggero e meno costoso.
2.2.1. Scelta della lente di collimazione per diodo laser
Dal momento che la cavità laser è realizzata in un diodo laser ad emissione
perpendicolare (edge-emitting), la radiazione viene emessa con geometria divergente ed
ellittica; infatti la divergenza viene distintamente indicata lungo gli assi x e y. L'asse con la
divergenza maggiore viene chiamato “fast axis” e quello con la divergenza minore viene
indicato come “small axis”.
La divergenza di un fascio laser collimato all’uscita di una lente asferica di focale f sarà
data da:
θfast axis = arctan
Laser width
Laser length
; θ slow axis = arctan
f
f
(2.2)
da queste due espressioni, date le dimensioni della cavità laser e la divergenza voluta si
ottiene la lunghezza focale f della lente.
Nel nostro caso i laser scelti nella sezione 2.1 sono i Laser Components 905D1S3J03UA
e 905D1S03UA ed il CVD65 della LDI le cui caratteristiche sono riportate qui di seguito:
Cod. laser
Potenza ottica
Ampiezza cavità
Beam
Spread
FWHM
905d1s03ua
6W
75 μm x 1 μm
20° x 10 °
905d1s3j03ua
25 W
85 μm x 10 μm
20° x 10 °
CVD65
13W
254 μm x 2 μm
30° x 10°
Ora imponendo una divergenza di 3 e 4 mrad lungo l’asse veloce otteniamo che le lenti
asferiche la cui focale f è:
Cod. laser
Divergenza 3 mrad
Divergenza 4 mrad
905d1s03ua
EFL = 25 mm
EFL = 19 mm
9
905d1s3j03ua
EFL = 28 mm
EFL = 2 mm
CVD65
EFL = 85 mm
EFL = 64 mm
Ottenuta la focale f della lente di collimazione, dobbiamo individuare l'apertura numerica
(NAlente) della lente. L'apertura numerica di una lente è la misura della massima porzione
di potenza ottica che la lente riesce a raccogliere. Nel nostro caso è richiesto che ci sia un
ottimo accoppiamento tra la potenza irradiata dal laser e la quantità di luce raccolta dalla
lente. Quindi, idealmente, la NAlente della lente dovrebbe essere superiore alla NA del
laser lungo il fast axis. Se ciò non avviene parte della radiazione verrà tagliata dalla lente
con conseguente perdita di potenza trasmessa. Per trovare l'apertura numerica del laser si
utilizza la seguente equazione:
NA = n sin (φ )
(2.3)
Dove n è l’indice di rifrazione del mezzo e nella maggior parte dei casi n=1 (indice di
rifrazione dell'aria). E' importante sottolineare che φ è la metà dell'angolo del cono di
divergenza preso rispetto al raggio marginale della gaussiana (cioè φ può essere
approssimato da (FWHM/2)*1.7). Dopo aver determinato l’apertura NA del laser (cioè la
minima NAlente che la lente deve possedere), bisogna determinare il diametro del fascio
collimato BD all’uscita della lente. Esso è approssimato da:
BD = 2 * f * NA * 2.576
(2.4)
Quindi tenendo conto delle relazione 2.2, 2.3 e 2.4 otteniamo le seguenti coppie di lenti di
collimazione per i due diodi laser:
Cod. Laser
Divergenza totale EFL
Diametro lente
905d1s03ua
3 mrad
25 mm
23 mm
4 mrad
19 mm
17 mm
3 mrad
28 mm
25 mm
4 mrad
21 mm
19 mm
3 mrad
85 mm
76 mm
4 mrad
64 mm
57 mm
905d1s3j03ua
CVD65
10
2.3. Driver di pilotaggio ed alimentazione Laser
Come abbiamo accennato nell’introduzione, l’equazione (1.1) esprime la relazione tra
l’intervallo di tempo che intercorre tra gli impulsi trasmessi e ricevuti da Intellicontrol e la
distanza percorsa dagli stessi. Facendo un semplice calcolo si vede che per ottenere una
risoluzione spaziale di almeno 3 metri è necessario che l’elettronica di pilotaggio e di
ricezione del segnale abbia tempi di risposta inferiori a 20 ns. Questo comporta un limite
superiore al tempo di salita (tr) degli impulsi laser generati che debbono essere quindi
dell’ordine dei ns. I diodi pulsati che abbiamo scelto hanno bisogno di una corrente di
pilotaggio di 7A (905d1s03ua) o 11A (905d1s3j03ua) con un duty factor massimo di 0.1%.
Si è trovato un componente OEM (Original Equipment Manufacturer) di alimentazione e
pilotaggio laser della Directed Energy il modello PCO 7110 90-30 che può alimentare i
nostri due diodi e generare un impulso laser con tempi di salita dell’ordine dei ns. In
particolare il PCO 7110 90-30 genera una corrente variabile tra 5A a 95A con tempi di
salita inferiori a 5ns. Inoltre poiché la distanza massima degli oggetti rilevati deve essere di
30 metri è necessario, sempre seguendo l’equazione (1.1), che la larghezza dell’impulso
twidth non sia superiore a 200ns; quindi, in definitiva, l’impulso laser in trasmissione dovrà
possedere le seguenti caratteristiche elettriche:
1.
tr <=10ns
2.
twidth<=200ns
In figura 2.2 è illustrato lo schema elettrico del componente OEM per il pilotaggio del driver
laser. P4 è il morsetto attraverso il quale è possibile misurare la corrente di carica del laser
e quindi stimare il “rise time” dell’impulso; C1 è la capacità che accumula la carica
necessaria per l’emissione dell’impulso laser, R1 e D1 sono la resistenza di carica ed il
diodo di scarica del diodo laser. Q1 è il mosfet che funziona da interruttore del circuito
elettrico il cui ingresso è il segnale digitale di pilotaggio del diodo laser.
Vcc
R1
C1
Cw1
L1
DA
D1
Q1
GND
P4
1
R_mon
P5
1
GND
FIG. 2.2
11
3.
MODULO DI RICEZIONE
3.1. Photodiodo di ricezione a valanga sensibile IR
Il fotodiodo scelto per la rivelazione del segnale ottico è un dispositivo della Laser
Components serie SAE-NIR modello SAE500NX. Esso è un fotodiodo a valanga
(Avalanche PhotoDiode), che differisce dai più comuni fotodiodi Pin per il fatto che i fotoni
incidenti innescano internamente una moltiplicazione a valanga. Condizione necessaria
alla generazione dei portatori è l'applicazione di una tensione di alimentazione inversa alta
per allargare lo regione di assorbimento della giunzione. Nei fotodiodi convenzionali, i
fotoni incidenti generano coppie elettrone-lacuna, anche chiamate portatori di carica, i
quali producono una fotocorrente misurabile. I portatori di carica generati dalla radiazione
vengono accelerati nel campo elettrico in maniera che producano ulteriori coppie
elettrone-lacuna mediante ionizzazione da impatto. Se la tensione di polarizzazione
inversa è minore della tensione di breakdown il fenomeno di moltiplicazione si estinguerà
a causa delle perdite dovute all'attrito. In queste condizioni un singolo fotone è capace di
generare centinaia, o anche migliaia di elettroni. Al di sopra della tensione di breakdown,
l'accelerazione dei portatori di carica è sufficiente a mantenere in vita la moltiplicazione.
Un singolo fotone può quindi essere sufficiente a generare una corrente costante, la quale
può essere misurata da un dispositivo esterno. La corrente fotogenerata viene calcolata
secondo l’equazione (3.1):
Id = Responsivity * PR
(3.1)
dove Responsivity (A/W) è il guadagno spettrale del fotodiodo, e Pr (W) è proprio la
potenza ottica ricevuta. Nel nostro caso i valori caratteristici del fotodiodo prescelto sono:
Diametro sensore = 500 μm x 500 μm
Responsivity = 50
Corrente di buio = 1.5nA
Tensione di alimentazione = 230 Volt
Tempo di salita alla risposta di impulso ottico = 500 psec
Tali valori sono compatibili per la ricezione dell’impulso laser generato dal modulo di
trasmissione
12
3.2. Elettronica di alimentazione photodiodo
Come già detto la necessità primaria di un fotodiodo a valanga è quella di essere
alimentato in maniera tale da innescare il meccanismo di moltiplicazione. Nel nostro caso,
il fotodiodo SAE500NX ha bisogno di una tensione di alimentazione piuttosto alta (230
Volt). Nei sistemi elettronici questo tipo di tensioni di alimentazioni alte sono generate da
convertitori DC/DC step-up. Nel nostro caso abbiamo scelto il componente della Laser
Components ABC 550-05 tale da fornire una tensione di uscita controllabile e superiore ai
230 Volt necessari per alimentare il fotodiodo SAE500NX.
3.3. Elettronica di condizionamento del segnale di ricezione
E’ di fondamentale importanza che il modulo di ricezione del segnale abbia una sezione di
amplificazione la cui banda passante sia tale da non distorcere il segnale ottico ricevuto.
Avere una banda passante troppo estesa dello stadio di amplificazione provoca la
ricezione di rumore ad alta frequenza con il conseguente degrado del segnale ricevuto.
Dall’altra parte, avere una banda passante troppo piccola provoca la distorsione del
segnale ricevuto e quindi della conseguente perdita della dinamica veloce propria
dell’impulso trasmesso. La progettazione dello stadio di condizionamento del segnale
ricevuto è stata quindi realizzata tenendo conto questi aspetti critici. In definitiva il modulo
di condizionamento del segnale è stato realizzato in modo tale da avere un guadagno
variabile ed una banda a 3 dB tale da soddisfare:
f3dB =
0.35
tr
(3.2)
Dove tr è il tempo di salita dell’impulso trasmesso. Nel nostro caso abbiamo impostato che
sia 10ns.
Il canale di ricezione è dunque formato da tre stadi in cascata:
1. L’amplificatore a transimpedenza
2. L’amplificatore di guadagno
3. Il comparatore-formatore
In figura 3.1 è mostrato lo schema elettrico progettato:
13
FIG. 3.1
La banda del primo stadio è stata dimensionata basandosi sul tempo di salita
dell’emissione laser, secondo la seguente formula:
fBW=0,35/trise
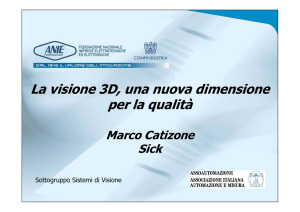
In figura 3.2 è visualizzato il tempo di salita dell’emissione ottica del laser LDI CVD65. La
misura è stata realizzata per mezzo del dispositivo Thorlabs DET36A, apponendolo
frontalmente al diodo laser.
FIG. 3.2
Assumendo per il laser un trise≈10ns, risulta una banda passante per il primo stadio:
fBW=0,35/10ns=35MHz
Dalla formula
f−3dB = √(GBP/2πRFCD) [Hz]
presente sul datasheet dell’OPA657, dove:
f−3dB= fBW, banda passante
14
GBP=1,6GHz, prodotto guadagno-banda
R1 resistenza di feedback
CD=10pF, somma della capacità di giunzione del fotodiodo e di quelle interne
all’operazionale
e dalle considerazioni ivi riportate, si ottiene
R1=22kΩ
Il secondo stadio ha un guadagno G2=100, ha funzione di amplificazione di tensione per
condizionare il segnale da inviare al comparatore-formatore e lavora in zona non lineare.
Il terzo stadio è un comparatore-formatore a soglia che ha il compito di generare un fronte
di salita il più ripido possibile in modo da rendere più accurata possibile la misura.
3.4. Ottica di Ricezione
L'utilizzo di una lente per la raccolta della radiazione diffusa da un generico target si rivela
fondamentale per un corretto funzionamento del sistema optoelettronico. Nell'equazione
del radar (vedi eq.2.1), impostando che la potenza di trasmissione sia di 6W, 25 W o 13W
otteniamo i diametri della lente in ricezione. Per trovare la focale della lente è sufficiente
impostare che l’angolo di vista in ricezione (FOV - Field of View) sia maggiore o uguale
della divergenza del fascio collimato trasmesso:
FOV = 2 * atan
diametro sensore
2* f
(3.3)
Quindi tenendo conto dell’equazione (3.1) e della (3.3) otteniamo che le lenti di ricezione
per i laser prescelti saranno :
Cod. Laser
FOV
EFL
Diametro lente
905d1s03ua
7,50 mrad
67 mm
45 mm
10 mrad
50 mm
43 mm
7.50 mrad
67 mm
60 mm
10 mrad
50 mm
57 mm
7.50 mrad
67 mm
108.34 mm
10 mrad
50 mm
96.06 mm
905d1s3j03ua
CVD65
15
4.
TEST FINALE
In figura 4.1 è riportato il sistema prototipale INTELLICONTROL composto dai vari blocchi
descritti nell’introduzione. Il dispositivo è stato assemblato e messo in funzione su un
opportuno tavolo ottico provvisto di ruote appositamente realizzato per condurre i test al di
fuori del laboratorio.
FIG.4.1 Dispositivo prototipale INTELLICONTROL
In FIG. 4.2 vi è l’ingrandimento del MODULO DI TRASMISSIONE, in cui si nota l’ottica di
collimazione laser, costituita da un tubo in cui è alloggiato il laser e la lente asferica, il
modulo di pilotaggio e alimentazione laser.
FIG.4.2 MODULO DI TRASMISSIONE LASER
16
In FIG. 4.3a è riportato il MODULO DI RICEZIONE del fascio laser in cui si vede la lente di
ricezione al cui punto focale vi è inserito il fotodiodo (FIG. 4.3b) e tutto il sistema
elettronico di condizionamento del segnale (FIG. 4.3c)
FIG. 4.3 MODULO DI RICEZIONE LASER
17
FIG. 4.4 test driver laser
In Fig. 4.4 è riportato l’andamento dei segnali del driver di alimentazione e pilotaggio del
laser (vedi paragrafo 2.3). Il segnale giallo, prelevato dal morsetto P4 (vedi fig. 2.2)
rappresenta l’impulso laser generato (tempo di salita 5ns), il segnale rosa è l’andamento
della tensione di carica del driver laser (caduta di potenziale ai capi della capacità C1, vedi
Fig. 2.2) ed in verde il segnale di pilotaggio del driver (segnale di ingresso al mosfet Q1,
vedi Fig. 2.2).
In figura 4.5 sono visibili i segnali prelevati dal circuito di condizionamento del segnale
ricevuto (vedi paragrado 3.3). In verde è rappresentato il segnale ingresso al primo stadio,
in giallo in uscita al primo stadio ed in blu il segnale in uscita dal secondo stadio: si può
notare la rapida salita del fronte che pilotera lo “Stop” per la misura.
FIG. 4.5 test canale di ricezione
In figura 4.6 è riportata, a titolo di esempio, un’immagine di oscilloscopio corrispondente
ad una misura effettuata. Il segnale blu è il segnale elettrico di trigger che il
microprocessore invia al modulo di trasmissione, mentre il segnale rosa corrisponde al
segnale ottico riflesso dal target distante 16 metri dal dispositivo INTELLICONTROL.
Come si vede dall’oscilloscopio, il ritardo temporale tra i due segnali è dt=168 ns dove
18
sottraendo circa 60ns (dovuti al ritardo sistematico del trigger elettrico) abbiamo un
dt=100ns che tenendo conto che lo spazio percorso dal segnale ricevuto è 2*ds=c*dt
abbiamo che la distanza del target da INTELLICONTROL è ds ≈ 16 m .
FIG. 4.6 MISURA DI DISTANZA DEL TARGET
19