Meccanica
9. Dinamica del Punto Materiale
http://campus.cib.unibo.it/2426/
Domenico Galli
Dipartimento di Fisica e Astronomia
22 febbraio 2017
Traccia
1. Primo Principio
2. Secondo Principio
3. Massa Inerziale
4. Quantità di Moto
5. Gravitazione e Moti Planetari
6. Problema Fondamentale della Dinamica del Punto Materiale
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
2
Il Primo Principio. Formulazione
Classica
Detto anche principio di inerzia, descrive il moto di un punto materiale
non soggetto a forze.
Formulato da Galileo Galilei (1564-1642).
Formulazione classica: “Qualunque punto materiale, non soggetto ad
alcuna forza, o rimane in quiete oppure si muove di moto rettilineo
uniforme”.
“Corpus omne perseverare in statu suo quiescendi vel movendi uniformiter
in directum, nisi quatenus a viribus impressis cogitur statum illum mutare”.
È stata una fondamentale conquista scientifica, in quanto
apparentemente contraddice l’esperienza comune:
Siamo abituati a pensare che sia necessario esercitare costantemente una
forza per mantenere un corpo in movimento (automobile, bicicletta, ecc.).
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
3
Il Moto nella Fisica Pre-Galileiana
Leggi diverse per moti di “tipo” diverso.
Aristotele (384-322 a.C.): impostazione errata, ma ritenuta valida per
altri 1900 anni, impedendo di fatto lo sviluppo della meccanica.
Moti naturali:
I
I
Moto verso il basso o verso l’alto (linea retta).
Moto degli astri (circolare).
Moti violenti: si credeva che fosse F ∝ v.
I
I
Moto di un carro trainato. Maggiore è la forza applicata, maggiore è la velocità.
Lancio di un sasso in direzione orizzontale. Cessata la spinta della mano, si
attribuiva all’aria la causa di una spinta aggiuntiva che sospinge il corpo in avanti
con forza decrescente.
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
4
Il Moto nella Fisica Galileiana
Utilizzo del metodo scientifico;
Princìpi fondamentali che valgono per tutti i moti.
La comprensione del principio di inerzia è stata ostacolata dalla
presenza, difficilmente eliminabile, di una forza: la forza di attrito.
Per comprendere le caratteristiche del moto in assenza di forze è
necessario effettuare esperimenti in condizioni di attrito via via meno
intenso ed estrapolarne i risultati alla condizione ideale di assenza
della forza di attrito.
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
5
Esperimenti di Galileo: Piano Inclinato
Su di un piano inclinato in discesa un punto materiale accelera.
Su di un piano inclinato in salita un punto materiale decelera.
Cosa accade se il piano è orizzontale? Dovrebbe non accelerare né
decelerare, dunque muoversi di moto uniforme (in realtà decelera).
accelera
decelera
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
(?)
D. Galli
Problema Fondament.
6
Esperimenti di Galileo: Piani Orizzontali
di Scabrosità Variabile
Il punto materiale viene fatto scendere da un piano inclinato e poi
continua su di un piano orizzontale scabro.
Minore è la scabrosità del piano orizzontale, maggiore è il percorso
del punto.
Si deduce che la
scabrosità del piano è
causa del rallentamento.
Se il piano fosse
assolutamente liscio il
punto continuerebbe a
muoversi senza rallentare.
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
7
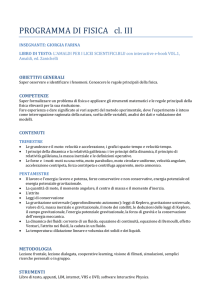
Esperimenti di Galileo: Doppio Piano
Inclinato
Il punto scende, percorre il tratto orizzontale, poi risale,
raggiungendo approssimativamente l’altezza iniziale (non la
raggiunge esattamente a causa dell’attrito).
Diminuendo l’inclinazione del secondo piano aumenta la distanza
orizzontale percorsa.
Se il secondo piano è
perfettamente
orizzontale, l’altezza
iniziale non può mai
essere raggiunta, e, in
assenza di attrito, il
moto del punto diviene
perpetuo.
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
8
Il Punto Materiale non Soggetto a Forze
Per studiare il moto di un punto non soggetto a forze occorre eliminare
tutte le forze che agiscono su di esso:
Forze meccaniche (cordicelle che trainano, molle, ecc.). È sufficiente
assicurarsi che non ci siano contatti meccanici.
Forze idrostatiche (spinta di Archimede). Assicurarsi che il punto
materiale non sia immerso in un liquido.
Vincoli: devono essere eliminati.
Attrito: devono essere eliminati strisciamenti e fluidi viscosi.
Forze di interazione: devono essere eliminate cariche elettriche e
magneti. Occorre inoltre allontanarsi dalla Terra e da altri corpi celesti.
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
9
Il Punto Materiale non Soggetto a Forze (II)
Fatto questo, abbiamo eliminato tutte le forze?
NO! Esiste un altro tipo di forza:
Viaggiando in automobile, quando freniamo, ci sentiamo sospinti in avanti.
Quando curviamo ci sentiamo sospinti all’esterno della curva.
Le forze che ci sospingono in avanti quando freniamo o all’esterno
quando curviamo:
Non sono dovute né a una molla, né a un filo che tira, né a un vincolo, né a
un fluido, né all’attrito, né alla gravità, neppure all’elettromagnetismo.
Esistono nel SdR dell’automobile, ma non nel SdR della strada.
Sono dette Pseudo-Forze (o Forze Inerziali o Forze Apparenti, o
Forze Fittizie o ancora Forze di d’Alambert).
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
10
Il Punto Materiale non Soggetto a Forze (III)
Esempi di Pseudo-Forze
Quando ci troviamo su di un’automobile che frena (accelerazione
opposta alla velocità, quindi diretta indietro) ci sentiamo sospinti in
avanti (rispetto all’automobile):
Osservatore a terra: non c’è nessuna forza in avanti;
Il passeggero tenderebbe a mantenere la stessa velocità mentre l’auto
diminuisce la propria velocità.
Il passeggero tenderebbe quindi a uscire dall’auto in avanti sfondando il
parabrezza;
Tuttavia il passeggero è rallentato dalla forza indietro esercitata
dall’attrito del sedile, dalle mani afferrate al volante o a una maniglia o dal
vincolo della cintura di sicurezza.
Osservatore sull’auto: è presente anche una pseudo-forza in avanti:
Essa non produce moto in quanto è equilibrata dalla forza indietro
esercitata dall’attrito del sedile, dalle mani afferrate al volante o a una
maniglia o dal vincolo della cintura di sicurezza.
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
11
Il Punto Materiale non Soggetto a Forze (IV)
Esempi di Pseudo-Forze
Quando ci troviamo su di un’automobile che curva (accelerazione
centripeta, verso il centro della curva) ci sentiamo sospinti (rispetto
all’automobile) verso l’esterno della curva:
Osservatore a terra: non c’è nessuna forza verso l’esterno della
curva:
Il passeggero tenderebbe a proseguire in linea retta mentre l’auto devia
dalla linea retta verso l’interno della curva.
Il passeggero tenderebbe quindi a uscire dall’auto lateralmente sfondando
lo sportello esterno alla curva;
Tuttavia il passeggero è trattenuto dalla forza centripeta (verso il centro
della curva) esercitata dall’attrito del sedile, dalle mani afferrate al volante
o a una maniglia o dal vincolo della cintura di sicurezza.
Osservatore sull’auto: è presente anche una pseudo-forza verso
l’esterno della curva (pseudo-forza centrifuga):
Essa non produce moto in quanto è equilibrata dalla forza centripeta
(verso l’interno della curva) esercitata dall’attrito del sedile, dalle mani
dalle mani afferrate al volante o a una maniglia o dal vincolo della cintura
di sicurezza.
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
12
Il Punto Materiale non Soggetto a Forze (V)
L’unica maniera per eliminare le pseudo-forze consiste nel porsi in un
SdR in cui esse non siano presenti
Nel caso dell’automobile che frena o che curva occorre porsi nel SdR
della strada.
Chiamiamo Sistema di Riferimento Inerziale un SdR in cui non sono
presenti pseudo-forze:
Nel quale, di conseguenza, un punto materiale non soggetto a forze
(forze meccaniche, idrostatiche, vincoli, forze di attrito e forze di
interazioni) o è in quiete o si muove di moto rettilineo uniforme.
Ma come possiamo sapere che esista almeno un SdR inerziale?
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
13
Il Primo Principio. Formulazione
Moderna
L’esistenza dei SdR inerziali non è affatto ovvia:
Dati molti corpi, molto lontani gli uni dagli altri
In modo da annullare le forze meccaniche, idrostatiche, i vincoli, le forze
di attrito e le forze di interazione,
si può sempre trovare un SdR in cui un corpo qualunque, considerato
separatamente dagli altri, sia in quiete o si muove con moto rettilineo
uniforme:
È sufficiente considerare un SdR animato con lo stesso moto del corpo
considerato.
Nessuna considerazione logica ci può invece assicurare che esista un
unico SdR in cui tutti questi corpi si muovano simultaneamente con
moto rettilineo uniforme.
Per tale motivo l’esistenza di un SdR inerziale è un principio fisico,
derivato dall’esperienza, ed è l’essenza del principio di inerzia.
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
14
Il Primo Principio. Formulazione
Moderna (II)
Formulazione moderna del Primo Principio della Dinamica:
Esiste almeno un Sistema di Riferimento inerziale .
Alcuni commenti sull’enunciato:
Il primo principio della dinamica descrive il moto di un punto
materiale in assenza di forze:
La formulazione classica pone l’enfasi sulle forze di attrito che per
parecchi secoli hanno impedito una corretta comprensione dei principi
della meccanica:
I
L’assenza di forze implica, in particolare, l’assenza delle forze di attrito.
La formulazione moderna pone l’enfasi sulle pseudo-forze:
I
L’assenza di forze implica, in particolare, l’assenza delle pseudo-forze.
Nella formulazione moderna è evidente che il primo principio non è un
caso particolare del secondo.
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
15
Sistemi di Riferimento Inerziali
Principio di relatività ristretta o speciale : le leggi della fisica hanno
la stessa forma in due Sistemi di Riferimento in moto
Traslatorio (non rotatorio),
Rettilineo (non curvilineo),
Uniforme (non vario)
l’uno rispetto all’altro.
Segue che, se esiste un SdR inerziale allora ne esistono infiniti:
Tutti i SdR in moto traslatorio rettilineo uniforme con velocità arbitraria
rispetto al SdR inerziale dato.
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
16
Sistemi di Riferimento Non-Inerziali
In un SdR non-inerziale, un punto materiale non soggetto a forze non si
muove di moto rettilineo uniforme, perché subisce l’accelerazione
causata dalle pseudo-forze.
Le pseudo-forze che agiscono su di un corpo sono proporzionali alla
massa del corpo.
Le pseudo-forze non hanno origine dall’interazione con un altro corpo
e non diminuiscono allontanandosi da altri corpi.
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
17
Sistemi di Riferimento
Approssimativamente Inerziali
Un’automobile che percorre alla velocità di 10 m/s (36 km/h) una
curva di raggio 20 m ha la componente normale dell’accelerazione pari
a 5 m/s2 rispetto al SdR Terrestre (fisso rispetto alla superficie
terrestre), che possiamo considerare con buona approssimazione
inerziale.
A causa di tale accelerazione il SdR dell’automobile non è inerziale.
Tuttavia il SdR Terrestre ruota a causa della rotazione della Terra
attorno al proprio asse, con accelerazione normale pari a circa
0.02 m/s2 .
A causa di tale accelerazione anche il SdR Terrestre non è perfettamente
inerziale, anche se si avvicina a un SdR inerziale assai più del SdR
dell’automobile.
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
18
Sistemi di Riferimento
Approssimativamente Inerziali (II)
Un SdR geocentrico — che non ruota come la Terra, ma ha gli assi
puntati verso corpi celesti lontani con movimento trascurabile — si
avvicina ancora di più a un SdR inerziale. Tuttavia la Terra ruota
attorno al Sole, con accelerazione normale pari a circa 0.006 m/s2 .
A causa di tale accelerazione anche il SdR geocentrico non è
perfettamente inerziale, anche se si avvicina a un SdR inerziale assai più
del SdR Terrestre.
Il SdR delle stelle fisse — che non orbita come la Terra attorno al
Sole, ma ha l’origine nel centro del Sole e gli assi puntati verso corpi
celesti lontani con movimento trascurabile — si avvicina ancora di più a
un SdR inerziale. Tuttavia il Sole ruota attorno al centro della Via
Lattea, con accelerazione normale pari a circa 2 · 10−10 m/s2 .
A causa di tale accelerazione anche il SdR delle stelle fisse non è
perfettamente inerziale, anche se si avvicina a un SdR inerziale assai più
del SdR Geocentrico.
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
19
Sistemi di Riferimento
Approssimativamente Inerziali (III)
All’epoca di Newton si riteneva che il SdR delle stelle fisse fosse un
SdR inerziale.
Oggi sappiamo che le stelle fisse non sono del tutto “fisse” per cui
anche nel SdR delle stelle fisse sono presenti pseudo-forze, per
quanto di piccola entità.
Oggi il concetto di SdR Inerziale non è più legato alle stelle fisse.
Il concetto di SdR Inerziale è oggi legato alla semplicità delle leggi
fisiche nel riferimento:
Un SdR Inerziale è un SdR in cui sono assenti le pseudo-forze.
Un SdR si avvicina a un SdR inerziale tanto più quanto più sono
trascurabili in esso le pseudo-forze.
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
20
L’Origine delle Pseudo-Forze
Perché in alcuni SdR le pseudo-forze non sono presenti, mentre in
altri esse sono presenti?
In fondo, se chiamiamo O0 x0 y 0 z 0 un SdR inerziale e Oxyz un SdR che
accelera rispetto a O0 x0 y 0 z 0 , per il Principio di Relatività:
Se è vero che il SdR Oxyz accelera rispetto al SdR O0 x0 y 0 z 0 ,
È parimenti vero che il SdR O0 x0 y 0 z 0 accelera rispetto al SdR Oxyz.
Perché le pseudo-forze sono assenti in O0 x0 y 0 z 0 e non in Oxyz?
Non potevano piuttosto essere assenti
in Oxyz e non in O0 x0 y 0 z 0 ?
Che cosa ha di “speciale”
il SdR inerziale O0 x0 y 0 z 0
affinché in esso non siano
presenti le pseudo-forze?
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
21
L’Origine delle Pseudo-Forze (II)
La risposta di Newton (1642-1727), che oggi sappiamo essere sbagliata,
fu che il SdR inerziale è privilegiato in quanto si trova in quiete (o in moto
traslatorio rettilineo uniforme) rispetto a un presunto “spazio assoluto”
o “etere”:
Per Newton le pseudo-forze hanno origine da un’accelerazione
rispetto al presunto “spazio assoluto”.
Contrariamente a Newton, Mach (1838-1916) era fortemente convinto
che lo “spazio assoluto” non esistesse:
Ipotizzò che le pseudo-forze avessero origine dall’accelerazione
media rispetto alla totalità delle masse nell’universo;
Come conseguenza, un’anisotropia della distribuzione della massa
nell’Universo, dovrebbe causare un’anisotropia delle pseudo-forze.
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
22
L’Origine delle Pseudo-Forze (III)
Nella Teoria della Relatività Generale (Einstein, 1915) la risposta è
un’evoluzione del punto di vista di Mach:
Il SdR inerziale è determinato dai campi gravitazionali locali che
hanno origine da tutta la materia dell’Universo, vicina e lontana:
La materia lontana contribuisce “in ritardo” per la velocità finita di
propagazione delle interazioni;
Il SdR inerziale è un SdR “in caduta libera” nel campo gravitazionale
locale:
I
Solidale a un qualunque corpo che si muova sotto l’azione del solo campo
gravitazionale locale;
Tuttavia, una volta che ci si è posti in un SdR inerziale, le leggi del
moto non sono più affette dalla distribuzione della massa nell’Universo.
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
23
L’Origine delle Pseudo-Forze (IV)
Il problema dell’origine delle pseudo-forze è un problema ancora
aperto della Fisica Moderna.
Sono stati progettati e realizzati raffinati esperimenti, ma ancora i
risultati sperimentali non hanno la precisione sufficiente per dare
una risposta definitiva.
Si cerca ancora di verificare se un’anisotropia della distribuzione
della massa nell’Universo, causi un’anisotropia delle pseudo-forze.
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
24
Il Secondo Principio
Secondo Principio della Dinamica, detto anche Legge di Newton o
Legge Fondamentale della Dinamica:
In un SdR inerziale, un punto materiale, sottoposto a una o più forze
F~1 , . . . F~n , si muove con accelerazione ~a, vettorialmente
~ = Pn F~i di tali forze:
proporzionale alla risultante R
i=1
~ = m ~a
R
dove m è un coefficiente scalare di proporzionalità (detto massa
inerziale) caratteristico del punto materiale considerato e
indipendente dalla sua posizione e dal suo stato di moto.
~ e ~a
Poiché sperimentalmente R
risultano avere sempre lo stesso verso,
segue che m > 0 .
Se m non fosse costante l’espressione
~ = m ~a non sarebbe corretta.
R
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
25
Misura Dinamica della Forza
Misura statica della forza:
Cordicella e dinamometro:
Misura della deformazione di un corpo elastico.
Misura dinamica della forza:
Se su di un punto materiale, di massa m nota, agisce una forza
sconosciuta F~ , tale forza può essere determinata a partire dalla
conoscenza della massa m e dell’accelerazione ~a:
F~ = m ~a
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
26
Breve Storia dell’Unità di Misura della
Massa Inerziale
L’unità di misura della massa nel Sistema internazionale è il chilogrammo
(simbolo kg).
1
Il grammo, pari a 1000
di chilogrammo, fu definito nel 1795 come la
massa di un centimetro cubo di acqua al punto di fusione (0 ◦ C).
Poiché gli scambi commerciali spesso riguardano oggetti ben più
massivi di un grammo ed essendo un campione costituito di acqua
scomodo e instabile, sorse l’esigenza di creare un campione più
massivo del grammo e basato su di un manufatto metallico.
Nella realizzazione del primo prototipo di chilogrammo, nel 1799, si
scelse di riferirsi al volume di un litro (ovvero 1 dm3 ) di acqua nel suo
stato di densità più stabile, cioè alla temperatura di 4 ◦ C, alla quale la
densità dell’acqua è massima.
Il prototipo, di puro platino, aveva una massa pari alla massa di
1.000 028 dm3 di acqua a 4 ◦ C, fu ratificato come Kilogramme des
Archives e rimase in vigore per novant’anni.
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
27
Breve Storia dell’Unità di Misura della
Massa Inerziale (II)
Dal 1889 il chilogrammo è stato definito come la massa di un nuovo
manufatto, denominato International Prototype Kilogram (IPK),
costituito di platino-iridio (lega 90%-10%) a forma di cilindro circolare
retto, con altezza pari al diametro (per minimizzare la superficie
rispetto al volume) ed entrambi pari a 39.17 mm.
Il prototipo è conservato presso il Bureau International des Poids et
Mésures a Sèvres, vicino a Parigi.
Nell’anno 2017 questa definizione di chilogrammo è ancora in vigore.
Il campione, a causa dell’inevitabile accumulazione di contaminanti
sulla superficie, è soggetto a una variazione di massa dell’ordine di
1 µg all’anno.
Il chilogrammo si riferisce quindi alla massa del campione subito dopo
il lavaggio, il quale deve essere eseguito con un procedimento ben
definito.
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
28
Breve Storia dell’Unità di Misura della
Massa Inerziale (III)
Dal 2018, in seguito alla ridefinizione del sistema internazionale, il
chilogrammo sarà invece definito fissando la costante di Planck h,
misurata in J · s, ovvero in kg m2 s−1 , al valore numerico:
h = 6.626 069 57 × 10−34 J · s = 6.626 069 57 × 10−34 kg m2 s−1
per cui il chilogrammo risulta definito come:
h
h
m−2 s =
6.626 069 57 × 10−34
6.626 069 57 × 10−34
299 792 4582
h
=
=
−34
2
6.626 069 57 × 10
· 9 192 631 770 c TCs
h
= 1.475521529 . . . × 1040 2
c TCs
1 kg =
2
⎧
299 792 458 −1 ⎫
⎪
⎪
⎪
⎪
s=
s
⎪
⎪
⎪
⎪
c
⎩
⎭
dove c è la velocità della luce nel vuoto e TCs è il periodo di
oscillazione della radiazione elettromagnetica emessa dagli atomi di
133 Cs in una particolare transizione.
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
29
Breve Storia dell’Unità di Misura della
Massa Inerziale (IV)
Si noti che, seguendo questo procedimento si definisce innanzitutto
l’unità di misura J · s = kg m2 s−1 , con la quale si misura il momento
angolare e l’azione. Successivamente, da questa definizione e dalla
definizione di secondo e di metro, si perviene alla definizione di
chilogrammo.
Il valore numerico 6.626 069 57 × 10−34 kg m2 s−1 assegnato alla
costante di Planck è tale che — nel momento in cui si adotta la nuova
definizione — il chilogrammo differisca dalla massa dell’IPK meno di
una parte su 108 (la massima precisione ottenuta fino a ora nella
misura di h), onde garantire la continuità tra le vecchie e le nuove
misure di massa.
In seguito, un eventuale miglioramento della precisione della misura di
h non ne modificherà il valore numerico, bensì renderà più precisa la
definizione di chilogrammo.
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
30
Unità di Misura della Forza
L’unità di misura della forza (e in particolare del peso ovvero della
forza-peso) nel Sistema Internazionale è il Newton (simbolo N):
Corrisponde alla forza la quale, agendo su di una massa di 1 kg, le
imprime un’accelerazione di 1 m/s2 .
Nel deprecato Sistema Tecnico, invece, la forza si misura in
chilogrammi-forza (simbolo kgf):
Corrisponde alla forza la quale, agendo su di una massa di 1 kg, le
imprime un’accelerazione di 9.80665 m/s2 .
Conversioni:
1 kgf = 9.80665 N
1 N = 0.101972 kgf
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
31
Densità
Si definisce densità la massa per unità di volume:
La densità può essere riferita a un volume finito (densità media):
m
ρm =
V
oppure a un volume elementare, cioè infinitesimo (densità puntuale):
ρ=
dm
dV
Nel Sistema Internazionale la densità si misura in kg/m3 .
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
32
Dimensioni e Unità di Misura
Nel Sistema Internazionale (SI) sono definite 7 unità di misura
fondamentali:
L’unità di lunghezza (L) cioè il metro (m);
L’unità di tempo (T ) cioè il secondo (s);
L’unità di massa (M ) cioè il chilogrammo (kg);
L’unità di intensità di corrente elettrica (I) cioè l’Ampère (A).
L’unità di temperatura (Θ) cioè il kelvin (K);
L’unità di quantità di materia (N ) cioè la mole (mol);
L’unità di intensità luminosa (J) cioè la candela (cd);
Tutte le altre unità di misura si dicono derivate, in quanto sono espresse
in termini delle 7 unità fondamentali.
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
33
Dimensioni e Unità di Misura (II)
Esempi di grandezze derivate:
Grandezza
Dimensione SI
Velocità
[v] = LT −1
Accelerazione
Forza
Densità
Unità SI
[a] = LT
−2
Simbolo
metro al secondo
m/s
metro al secondo quadrato
m/s2
[F ] = [ma] = M LT −2 newton
[ρ] =
m
V
= M L−3
N = kg m/s2
chilogrammo per metro cubo
kg/m3
Quantità di moto [Q] = [mv] = M LT −1 chilogrammo metro al secondo
[p] =
Lavoro, energia
[W ] = [F s] = M L2 T −2 joule
J = Nm
watt
W = J/s
Potenza
[P ] =
S
= ML
W t
−1
2
T
= ML T
−2
−3
pascal
kg m/s
Pressione
F Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
Pa = N/m2
D. Galli
Problema Fondament.
34
Massa e Peso
In assenza di aria, tutti i corpi, in prossimità della superficie
terrestre, cadono con la medesima accelerazione pari a circa:
g = 9.80665 m/s2 :
Varia lievemente, in realtà, da luogo a luogo, in relazione alla latitudine,
all’altitudine, ecc.
Per il II principio della dinamica F~ = m~a, e dunque, in particolare per
quanto riguarda la forza peso (detta anche semplicemente peso):
Fp = F~p = mk~g k = mg
Dunque, essendo l’accelerazione di gravità indipendente dalla massa
dei corpi, segue che il modulo della forza peso è proporzionale alla
massa.
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
35
Massa e Peso (II)
Ricordiamo tuttavia che la massa è uno scalare mentre il peso (o
forza-peso) è un vettore applicato.
Inoltre la massa di un corpo è la stessa ovunque, a qualunque
latitudine, sulla Terra come sulla Luna.
Il peso, invece, varia con l’accelerazione gravitazionale g, dunque
varia lievemente con la latitudine e sulla Luna è circa 61 del peso sulla
Terra:
Un grave che ha massa 60 kg sulla Terra, ha massa 60 kg anche sulla Luna.
Lo stesso grave ha peso 588 N (cioè 60 kgf) sulla Terra a 45◦ di latitudine,
ma ha peso circa 100 N (cioè 10 kgf) sulla Luna.
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
36
Quantità di Moto e Impulso
~ di un punto materiale il prodotto:
Si definisce quantità di moto Q
~ = m ~v
Q
Per un sistema materiale qualsiasi (costituito da n punti materiali) è
invece la somma vettoriale:
~ =
Q
n
X
mi ~vi
i=1
Derivando rispetto al tempo l’espressione per il punto materiale, si
ottiene:
~˙ = d (m ~v ) = m d~v + dm ~v = m ~a + dm ~v
Q
dt
dt
dt
dt
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
37
Quantità di Moto e Impulso (II)
Se la massa m è costante, si ha:
dm
=0
dt
⇒
~˙ = d (m ~v ) = m ~a + dm ~v = m ~a
Q
dt
dt
Per cui il secondo principio della dinamica si può scrivere:
~ =Q
~˙
R
(II principio – Legge di Newton)
~ = m ~a e
In realtà questa espressione è più generale dell’espressione R
vale anche nel caso in cui la massa m varia nel tempo.
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
38
Quantità di Moto e Impulso (III)
~ =Q
~˙ rispetto al tempo nell’intervallo [t1 , t2 ],
Se integriamo la relazione R
otteniamo:
~
dQ
F~ =
dt
Zt2
F~ dt =
t1
Zt2
t1
~
î ót2
dQ
~
~ (t2 ) − Q
~ (t1 )
dt = Q
=Q
t1
dt
Si definisce impulso di una forza F~ nell’intervallo di tempo [t1 , t2 ], la
quantità:
I~ F~ , [t1 , t2 ] =
Ä
ä
Zt2
F~ dt
t1
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
39
Quantità di Moto e Impulso (IV)
La precedente relazione:
~ (t2 ) − Q
~ (t1 )
I~ F~ , [t1 , t2 ] = Q
Ä
ä
è detta Teorema dell’Impulso.
L’impulso della forza risultante agente su di un punto materiale,
relativo a un dato intervallo di tempo, è uguale alla corrispondente
variazione della sua quantità di moto.
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
40
Quantità di Moto e Impulso (V)
Il Colpo di un Martello
Applicazione del Teorema dell’Impulso:
I~ F~ , [t1 , t2 ] =
Ä
ä
Z t2
~ (t2 ) − Q
~ (t1 )
F~ dt = Q
t1
A parità di variazione di quantità di moto (da un istante prima a un
istante dopo il colpo):
Se l’acciaio è più rigido, e dunque si deforma di meno, l’urto (cioè il
contatto) dura per un intervallo di tempo minore e perciò la forza
esercitata è maggiore.
Un martello di piombo, che si deforma molto, esercita una forza piccola
nel colpire.
Acciaio
meno rigido
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
Acciaio
più rigido
D. Galli
Problema Fondament.
41
Leggi di Keplero
Le forze gravitazionali, con cui tutti i corpi si attraggono l’un l’altro,
furono studiate dapprima con misura dinamica e soltanto oltre un
secolo più tardi con misura statica.
Il moto dei pianeti, osservato con grande precisione e riferito alle
stelle fisse (descrizione più semplice) fu riassunto da Keplero in 3
leggi empiriche (cioè leggi descrittive, che riassumono l’osservazione).
Dalle caratteristiche del moto dei pianeti, riassunte dalle leggi di
Keplero, ricavando l’accelerazione e dunque effettuando una misura
dinamica della forza, Newton fu in grado di ricavare una legge assai
più generale (Legge della Gravitazione Universale).
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
42
Leggi di Keplero (II)
Le leggi di Keplero descrivono soltanto il moto dei pianeti e di altri
corpi in orbita.
La legge di Newton contiene le leggi di Keplero ma descrive, per
esempio, anche il moto di un sasso che cade sulla Terra lungo la
verticale, o il peso di un corpo in quiete.
Leggi di Keplero:
1. I pianeti si muovono su orbite ellittiche, di cui il Sole occupa uno dei due
fuochi (N.B.: le orbite giacciono su di un piano).
2. La velocità areolare dei pianeti rispetto al Sole è costante.
3. I quadrati dei tempi di rivoluzione dei pianeti sono proporzionali ai cubi dei
semiassi maggiori delle ellissi corrispondenti.
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
43
Forze Centrali
Dalla seconda legge di Keplero si trova che la forza F~SP che il Sole
esercita sui pianeti è una forza centrale:
Ovvero una forza diretta lungo la congiungente Sole-pianeta ~rSP .
Infatti, per la costanza della velocità areolare, risulta:
1
~ ≡ cost.
~rSP ∧ ~vP = A
2
per cui, derivando membro a membro rispetto al tempo, si ottiene:
1
1
~vP ∧ ~vP + ~rSP ∧ ~aP = ~0 ⇒ ~rSP ∧ ~aP = ~0 ⇒ ~rSP k ~aP
2 | {z } 2
~0
Perciò la forza F~SP = mP ~aP , avendo la stessa direzione
dell’accelerazione, è anch’essa diretta come il vettore posizionale ~rSP .
F~SP k ~rSP
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
44
Legge di Gravitazione Universale
Dipendenza dalla Distanza
Dalla prima e seconda legge di Keplero si trova anche che la forza F~SP
che il Sole esercita sui pianeti ha modulo inversamente proporzionale al
quadrato della distanza.
Conviene utilizzare le coordinate cilindriche (r, ϕ, z) e la base di versori
cilindrica {ı̂r , ı̂ϕ , k̂}.
L’equazione dell’ellisse di semiassi α (maggiore) e β (minore) ed
eccentricità e si scrive, in coordinate cilindriche:
α 1 − e2
r (ϕ) =
1 − e cos ϕ
e i 3 parametri α, β ed e sono legati
dalla relazione:
Ä
ä
α2 1 − e2 = β 2
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
45
Legge di Gravitazione Universale (II)
Dipendenza dalla Distanza
~ è costante,
Per la seconda legge di Keplero la velocità Areolare A
per cui è costante anche il suo modulo A:
1 2
r ϕ̇ = A ≡ cost.
2
Inoltre, durante un periodo T del moto di rivoluzione, l’area T A
spazzata dal vettore posizionale ~rSP è pari all’area dell’intera ellisse,
pari a παβ:
T A = παβ
⇒
T
1 2
r ϕ̇ = παβ
2
Ricaviamo quindi:
r2 ϕ̇ =
2π
αβ
T
⇒
ϕ̇ =
2π αβ
T r2
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
46
Legge di Gravitazione Universale (III)
Dipendenza dalla Distanza
Determiniamo ora la componente azimutale aϕ = 2ṙϕ̇ + rϕ̈
dell’accelerazione.
Dalla relazione r2 ϕ̇ ≡ cost., derivando membro a membro rispetto al
tempo, otteniamo:
d r2 ϕ̇
= 0 ⇒ 2 r ṙ ϕ̇ + r2 ϕ̈ = r (2 ṙ ϕ̇ + r ϕ̈) = r aϕ = 0
dt
quindi, essendo r 6= 0:
aϕ = 0
come ci attendevamo, trattandosi di una
forza centrale e considerando la
base cilindrica con origine in S.
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
47
Legge di Gravitazione Universale (IV)
Dipendenza dalla Distanza
Determiniamo ora la componente radiale ar = r̈ − rϕ̇2
dell’accelerazione.
Il secondo termine si scrive:
ã
Å
4π 2 α2 β 2
2π αβ 2
2
=
−
−r ϕ̇ = −r
T r2
T 2 r3
Determiniamo ora il primo termine r̈ a partire dall’equazione dell’ellisse:
α 1 − e2
r (ϕ) =
1 − e cos ϕ
Derivando rispetto al tempo:
α 1 − e2
r2
e
(sin
ϕ)
ϕ̇
=
−
ṙ = −
e (sin ϕ) ϕ̇ =
α (1 − e2 )
(1 − e cos ϕ)2
e sin ϕ
2π
e sin ϕ
= −r2 ϕ̇
= − αβ
2
α (1 − e )
T
α (1 − e2 )
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
48
Legge di Gravitazione Universale (V)
Dipendenza dalla Distanza
Derivando nuovamente rispetto al tempo, otteniamo:
2π
e cos ϕ
2π
e cos ϕ 2π αβ
r̈ = − αβ
ϕ̇ = − αβ
=
2
T
α (1 − e )
T
α (1 − e2 ) T r2
4π 2 α2 β 2 e cos ϕ
=− 2
T
r2 α (1 − e2 )
La componente radiale dell’accelerazione vale quindi:
ñ
ô
4π 2 α2 β 2
e cos ϕ
1
2
ar = r̈ − rϕ̇ = − 2
=
+
T
r2
α (1 − e2 ) r
ñ
ô
4π 2 α2 β 2
e cos ϕ
1 − e cos ϕ
=− 2
+
=
T
r2
α (1 − e2 )
α (1 − e2 )
1
4π 2 α2 α2 1 − e2
4π 2 α3
4π 2 α2 β 2
=
−
=
−
=− 2
T
r2 α (1 − e2 )
T 2 r2 α (1 − e2 )
T 2 r2
dove abbiamo utilizzato la relazione β 2 = α2 1 − e2 .
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
49
Legge di Gravitazione Universale (VI)
Dipendenza dalla Distanza
Otteniamo quindi:
ar = −
4π 2 α3
T 2 r2
Infine dall’espressione nella base cilindrica ~a = ar ı̂r + aϕ ı̂ϕ + az k̂
possiamo determinare il vettore accelerazione ~aP del pianeta:
4π 2 α3
ı̂r
T 2 r2
e la forza F~SP = mP ~aP che il Sole esercita sul pianeta.
~aP = −
4π 2 α3
F~SP = −mP 2 2 ı̂r
T r
Come si può osservare, tale forza ha modulo
inversamente proporzionale al quadrato della distanza.
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
50
Legge di Gravitazione Universale (VII)
Dipendenza dalla Massa
Nell’espressione:
4π 2 α3
k
F~SP = −mP 2 2 ı̂r = −mP 2 r̂SP
T r
rSP
2
α3 contiene il rapporto tra il cubo del semiasse
il fattore k = 4π
T2
maggiore α dell’ellisse e il quadrato del tempo di rivoluzione T , che,
per la terza legge di Keplero (T 2 ∝ α3 ) è lo stesso per tutti i pianeti.
Per il III Principio della Dinamica, che introdurremo più avanti, la
forza che il Sole esercita sul pianeta è opposta alla forza che il pianeta
esercita sul Sole.
Poiché la forza è proporzionale alla massa del pianteta mP , per
considerazioni di simmetria, deve essere anche proporzionale alla
massa del Sole mS . La costante k deve quindi contenere la massa del
Sole mS . Potremo quindi scrivere:
k = γ mS
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
51
Legge di Gravitazione Universale (VIII)
Universalità
Otteniamo quindi la legge:
mP mS
r̂SP
F~SP = −γ
2
rSP
Newton suppose che questa forza attrattiva
si esercitasse non soltanto tra Sole e
pianeti, ma anche tra qualunque coppia
di corpi materiali.
m1 m2
m1 m2
F~12 = −γ
r̂12 = −γ
~r12
2
3
r12
r12
Legge di Gravitazione Universale (Newton): Qualsiasi punto materiale
P1 , di massa m1 , esercita su qualunque altro punto materiale P2 , di
massa m2 , una forza attrattiva diretta lungo la congiungente dei due
punti, di modulo direttamente proporzionale alle due masse e
inversamente proporzionale al quadrato della distanza dei due punti.
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
52
Legge di Gravitazione Universale (IX)
Universalità
Nella Legge di Gravitazione Universale di Newton:
m1 m2
m1 m2
r̂12 = −γ
~r12
F~12 = −γ
2
3
r12
r12
γ è una costante universale, che dipende soltanto dalle unità di
misura: .
Nel Sistema Internazionale γ = 6.67408 · 10−11 m3 kg−1 s−2 .
La Legge di Gravitazione Universale di Newton è più generale (e più
importante) delle leggi di Keplero:
Descrive il moto dei pianeti lungo orbite ellittiche;
Descrive anche la caduta dei gravi lungo la verticale.
Lo studio dinamico di Newton, basato sulle leggi di Keplero, non
consentiva tuttavia di determinare la costante γ.
Per determinare γ è necessario eseguire una misura statica della
forza di attrazione gravitazionale:
Tale misura fu eseguita da Cavendish circa 100 anni dopo.
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
53
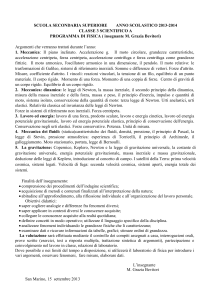
Esperimento di Cavendish
Henry Cavendish (1731-1810) eseguì per la prima volta nel 1798 una
misura statica della forza di gravità, con cui fu possibile determinare il
valore della costante gravitazionale γ e dedurre una stima della massa
terrestre mT , fino ad allora sconosciuta.
Filo di torsione: presenta elasticità di torsione:
M (u) = −k ϕ
dove k è detto costante elastica di torsione.
Se si torce il filo di un angolo ϕ le forze elastiche generano una coppia
di momento assiale M (u) .
filo di torsione
û
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
54
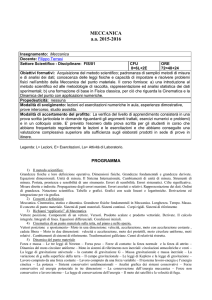
Esperimento di Cavendish (II)
Esperimento di Cavendish: manubrio, con due sferette di piombo P1
e P2 di massa nota alle estremità, appeso a un filo di torsione (con k
noto):
Si avvicinano le 2 sfere S1 e S2 , pure di piombo, di massa nota;
Si osserva l’angolo ϕ di rotazione del manubrio, da esso si calcola il
momento assiale della coppia di forze e si risale alla forza.
Ripetendo più volte l’esperimento, con masse diverse e distanze
diverse, si può determinare la costante gravitazionale γ.
filo di torsione
û
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
55
Esperimento di Cavendish (III)
Conosciuto γ si può determinare la massa della Terra.
Poiché la forza peso esercitata su di un punto materiale di massa m
sulla superficie della Terra è:
F~p = m ~g
e per la legge di gravitazione universale si deve
avere anche, detto RT il raggio terrestre (la prima
misura si deve a Eratostene, 240 a. C.) e mT la
massa della Terra:
mT m
R̂T
F~p = γ
RT2
filo di torsione
si avrà, di conseguenza:
mg = γ
mT m
RT2
⇒
mT =
RT2 g
≈ 5.9737 · 1024 kg
γ
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
û
D. Galli
Problema Fondament.
56
Massa Inerziale e Massa Gravitazionale
La massa inerziale m(i) , che compare nel Secondo Principio della
Dinamica:
F~ = m(i) ~a
ha un significato concettualmente diverso dal significato della massa
gravitazionale m(g) , che compare nella Legge di Gravitazione
Universale:
(g)
(g)
m m
F~12 = −γ 1 2 2 r̂12
r12
La massa inerziale m(i) è la “resistenza” opposta da un corpo sottoposto
a una forza a modificare la propria velocità;
La massa gravitazionale m(g) è la capacità di un corpo di attrarre altri
corpi (massa gravitazionale attiva) o la capacità di un corpo di essere
attratto da altri corpi (massa gravitazionale passiva).
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
57
Massa Inerziale e Massa Gravitazionale (II)
Non c’è ragionamento logico né calcolo matematico che ci consenta
di concludere che m(g) ∝ m(i) .
Tuttavia osserviamo che l’accelerazione con cui cade un corpo nel
vuoto ha modulo:
(g)
a=
(g)
mT m(g)
mT m(g)
F
1
=
γ
=
γ
RT2
RT2 m(i)
m(i)
m(i)
per cui, se non valesse rigorosamente la proporzionalità
m(g) ∝ m(i) , corpi di massa diversa cadrebbero, nel vuoto, con
accelerazione diversa.
Poiché, sperimentalmente, questo fenomeno non si osserva,
possiamo concludere che m(g) ∝ m(i) .
Se m(g) e m(i) sono misurate con le stesse unità di misura, risulta
m(g) = m(i) .
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
58
Equazioni Differenziali Ordinarie
Sono equazioni nelle quali l’incognita è una funzione f (nelle
equazioni algebriche l’incognita è un numero):
f : t 7−→ x = f (t),
f : R −→ R,
L’equazione coinvolge la funzione f , la variabile indipendente t e le
derivate di diverso ordine della funzione f :
⎧
⎫
(n)
...
⎪
⎪
⎪
⎪
F⎪
t, f (t) , f˙ (t) , f¨ (t) , f (t) , . . . , f (t)⎪
= 0,
⎪
⎪
⎪
⎪
⎪
⎪
⎩
⎭
F : Rn+2 −→ R
Esempio (oscillatore armonico smorzato e forzato)
ẍ (t) +
λ
k
F0
ẋ (t) +
x (t) −
cos (ω t) = 0
m
m
m
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
59
Equazioni Differenziali Ordinarie (II)
I teoremi di Eulero e di Peano-Picard garantiscono, sotto certe
condizioni, l’esistenza e l’unicità della soluzione del problema di
Cauchy, ovvero di un’equazione differenziale, date le condizioni iniziali:
⎧
⎫
(n)
...
⎪
⎪
⎪
˙ (t) , f¨ (t) , f (t) , . . . , f (t)⎪
⎪
⎪
F
t,
f
(t)
,
f
= 0,
⎪
⎪
⎪
⎪
⎪
⎪
⎩
⎭
f (t) = x0,0
˙
f (t) = x0,1
¨
f (t) = x0,2
···
(n−1)
f (0) = x
0,n−1
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
60
Forze Dipendenti da Posizione, Velocità
e Tempo
Esistono forze che dipendono dalla posizione occupata dal punto
materiale (forze posizionali), come la forza di gravità, la forza
elettrostatica, la forza elastica esercitata da una molla, ecc.
Altre forze dipendono dalla velocità del punto materiale, come la
resistenza viscosa, la resistenza idraulica, la forza magnetica, ecc.
Altre ancora dipendono esplicitamente dal tempo, come quella
esercitata dal dispositivo in figura.
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
61
Forze Dipendenti da Posizione, Velocità
e Tempo (II)
Una dipendenza implicita della forza dal tempo è una dipendenza
mediata dalla posizione ~r e/o dalla velocità ~v . Essa consiste in:
Una dipendenza della forza F~ dalla posizione ~r e/o dalla velocità ~v ;
Una variazione nel tempo della posizione ~r o della velocità ~v .
)
~
Ä
ä
F = F~ (~v )
~v = ~v (t)
⇒
F~ = F~ ~v (t)
Una dipendenza esplicita della forza dal tempo, invece, non è
mediata dalla modificazione della posizione o della velocità nel tempo:
F~ = F~ (t)
Quando la dipendenza dal tempo è esplicita, la forza varia nel tempo
anche se posizione e velocità restano invariate.
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
62
Forze Dipendenti da Posizione, Velocità
e Tempo (III)
Nel caso più generale la dipendenza di una forza dal tempo si può
scrivere:
F~ = F~ ~r (t) , ~v (t) , t
Ä
ä
e la sua derivata totale rispetto al tempo si scrive:
∂ F~ dx ∂ F~ dy ∂ F~ dz
∂ F~ dvx
∂ F~ dvy
∂ F~ dvz
∂ F~
dF~
=
+
+
+
+
+
+
dt
∂x dt
∂y dt
∂z dt
∂vx dt
∂vy dt
∂vz dt
∂t
|{z}
|
{z
}
dipendenza
esplicita
dipendenza implicita
Se la dipendenza F~ = F~ (~r, ~v , t) è nota, dal II principio della dinamica si
può calcolare l’accelerazione:
~a =
1 ~
F (~r, ~v , t)
m
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
63
Problema Fondamentale
Il problema che consiste nel prevedere il moto di un punto materiale
sottoposto a forze conosciute, in un prestabilito Sistema di Riferimento,
si chiama problema fondamentale della dinamica del punto materiale.
Più precisamente, il problema fondamentale della dinamica del punto
materiale consiste, a partire dalla conoscenza delle forze:
F~ = F~ (~r, ~v , t)
e della posizione e velocità iniziali:
~r (0) = ~r0 ,
~v (0) = ~v0 ,
nel determinare la funzione vettoriale del moto del punto materiale:
~r = ~r (t)
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
64
Problema Fondamentale (II)
Nella base cartesiana, il problema fondamentale della dinamica del punto
materiale consiste, a partire dalla conoscenza delle forze:
Fx =Fx (x, y, z, vx , vy , vz , t)
F =F (x, y, z, v , v , v , t)
y
y
x y z
F =F (x, y, z, v , v , v , t)
z
z
x y z
e della posizione e velocità iniziali:
x (0) = x0
y (0) = y0 ,
z (0) = z
0
ẋ (0) = v0x
ẏ (0) = v0y
ż (0) = v
0z
nel determinare la funzione vettoriale del moto del punto materiale:
x = x (t)
y = y (t)
z = z (t)
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
65
Problema Fondamentale (III)
Per affrontare il problema, si utilizza il Secondo Principio della Dinamica
F~ = m ~a per ricavare l’accelerazione:
ä
Ä
ä
1 ~Ä
F ~r (t) , ~v (t) , t
F~ = F~ ~r (t) , ~v (t) , t
⇒
~a =
m
e si ottiene così, nella base cartesiana:
Ä
ä
ẍ (t) = 1 F x (t) , y (t) , z (t) , ẋ (t) , ẏ (t) , ż (t) , t
x
m
Ä
ä
1
x
(t)
,
y
(t)
,
z
(t)
,
ẋ
(t)
,
ẏ
(t)
,
ż
(t)
,
t
ÿ
(t)
=
F
y
m
Ä
ä
z̈ (t) = 1 Fz x (t) , y (t) , z (t) , ẋ (t) , ẏ (t) , ż (t) , t
m
Si tratta di un sistema di 3 equazioni differenziali del II ordine le cui incognite
sono
le 3 funzioni:
x = x (t)
y = y (t)
z = z (t)
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
66
Problema Fondamentale — Caso
Unidimensionale
Nel caso particolare in cui il punto materiale sia si muova lungo una
retta si ha una sola equazione del II ordine, con due condizioni iniziali.
Scelta, come asse x, la retta lungo la quale si muove il punto
materiale, si ottiene:
Ä
ä
1
x
(t)
,
ẋ
(t)
,
t
F
ẍ
(t)
=
x
m
(
x (0) = x0
ẋ (0) = v0x
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
67
Problema Fondamentale — Caso Unidimensionale — Forza Indipendente dalla Posizione
Nel caso ancor più particolare di un punto materiale che si muove lungo una
retta, soggetto a una forza indipendente dalla posizione, il sistema diviene:
Ä
ä
ẍ (t) = 1 F ẋ (t) , t
x
m
(
x (0) = x0
ẋ (0) = v0x
e si può ridurre a una sola equazione differenziale del I ordine in vx = ẋ:
Ä
ä
v̇ (t) = 1 F v (t) , t
x x
x
m
vx (0) = v0x
Determinata vx (t), la funzione del moto si ottiene per integrazione diretta:
x (t) = x (0) +
Zt
vx (t) dt
0
Meccanica – 9. Dinamica del Punto Materiale
I Principio
II Principio Massa
Quantità di Moto Gravitazione
D. Galli
Problema Fondament.
68
Domenico Galli
Dipartimento di Fisica e Astronomia
[email protected]
https://www.unibo.it/sitoweb/domenico.galli
https://wiki-lhcb.bo.infn.it/bin/view/GalliDidattica
Meccanica – 9. Dinamica del Punto Materiale
D. Galli
69