Capitolo 2 – Struttura fisica del Robot
CAPITOLO 2
STRUTTURA FISICA DEL ROBOT
In questo capitolo viene descritta la struttura fisica del robot partendo dalla struttura meccanica e
proseguendo con la descrizione dettagliata dell’impianto elettrico e di tutti circuiti che lo costituiscono.
La struttura meccanica è stata realizzata dai colleghi Marco Ingrao ed Erio Grillo, mentre il mio lavoro ha
riguardato la parte elettrica ed elettronica del robot.
STRUTTURA MECCANICA
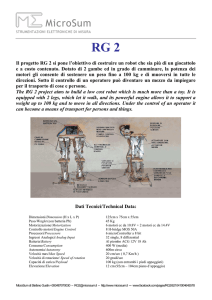
La base mobile costruita per Rabbiati, progettata per il ruolo specifico di portiere che il robot ricopre
all’interno della squadra, presenta una semplicità generale offrendo allo stesso tempo un’elevata
efficienza di funzionamento (Figura 2.1).
Figura 2.1 - La base mobile di Rabbiati
La meccanica realizzata segue i principi del modello matematico studiato dal collega Marco Ingrao
durante il suo lavoro di tesi.
Il sistema di guida è di tipo differenziale, con due ruote motrici indipendenti e quattro ruote
omnidirezionali di solo appoggio poste agli angoli della base.
Fabrizio Cuzzotti
19
Capitolo 2 – Struttura fisica del Robot
Le ruote motrici sono state costruite e gommate appositamente per Rabbiati. Le ruote sono ricoperte di un
materiale gommoso appositamente scelto per garantire il massimo grip possibile.
L’accoppiamento delle ruote con l’asse della trasmissione rappresenta un annoso problema in robotica
mobile. Questo problema, assieme alla costruzione ed alla gommatura delle ruote stesse, è stato affrontato
separatamente nell’ambito di un progetto minore.
Per la tipologia delle meccanica adottata, anche l’algoritmo di controllo di basso livello risulta essere non
eccessivamente complesso. Il controllo sulle due ruote permette di ottenere la sterzata variando la loro
velocità: maggiore è la precisione che si vuole ottenere per la sterzata, maggiore sarà la precisione
richiesta al controllore di velocità.
Le ruote omnidirezionali
Come ruote folli, aventi solamente la funzione di appoggio, è stato usato un modello omnidirezionale;
questa soluzione risulta essere quella migliore se confrontata con l’utilizzo di ruote castor o modelli
simili, poiché offrono meno attrito alla rotazione. Come si può notare nel dettaglio di Figura 2.2, questo
particolare tipo di ruota presenta sul suo profilo una serie di piccoli cilindri, ognuno in grado di ruotare
sul proprio asse.
Figura 2.2 - Particolare di una ruota omnidirezionale
Quando il robot si sposta in linea retta, le ruote omnidirezionali agiscono ruotando sul perno sul quale
sono montate. Nel momento in cui il robot esegue una sterzata o una rotazione su se stesso, si può avere,
20
Fabrizio Cuzzotti
Capitolo 2 – Struttura fisica del Robot
oltre ad una eventuale rotazione di tali ruote sul perno di bloccaggio, anche la rotazione dei cilindretti, che
costituiscono il profilo della ruota stessa, nel loro asse.
L’utilizzo delle ruote omnidirezionali è diventato ormai consuetudine per questo tipo di robot. Durante la
competizione RoboCup 2003 è stato possibile vederne di svariati modelli, utilizzati anche come ruote
motrici.
Materiale utilizzato
Per la costruzione della struttura portante di Rabbiati sono stati utilizzati diversi materiali:
•
fibra di carbonio;
•
ergal;
•
anticorodal.
Per la scelta dei materiali adatti, è stato seguito il progetto CAD contenente le informazioni necessarie per
una corretta realizzazione. All’atto pratico, in alcuni casi, sono state utilizzate soluzioni non previste in
fase di progetto come il bloccaggio di tutti i pezzi e l’utilizzo di fogli interi di materiale anziché semplici
profili. Inoltre non era stato previsto alcun sistema di ancoraggio delle batterie.
Per la costruzione delle lastre costituenti i piani di Rabbiati e per la realizzazione del kicker è stata
utilizzata la fibra di carbonio, mentre, nel progetto originale, erano previste lastre in alluminio, soluzione
che, all’atto pratico, si è rivelata non conveniente per il peso. Su tale lastra sono fissati i motori e vi sono
appoggiate le batterie e le bombole di aria compressa usate per il sistema di calcio della palla; con i pesi
in gioco, se si fosse utilizzata la soluzione proposta dal progetto originario, la lastra si sarebbe piegata,
compromettendo la stabilità di tutta la struttura. Una possibile alternativa poteva essere quella di
aumentare lo spessore della lastra aumentando, di conseguenza in modo considerevole il peso del robot,
che, per questo tipo di applicazione, è un fattore molto importante: un maggior peso da spostare
comporterebbe infatti minori prestazioni ed un maggior consumo di corrente, diminuendo l’autonomia del
robot.
L’utilizzo del carbonio ha permesso di ottenere, allo stesso tempo, un piano molto leggero e resistente alla
flessione; data la pericolosità della polvere di questo materiale, che si produce nelle operazioni di taglio o
di foratura, gli scarichi della piastra sono stati fatti in un’officina specializzata.
Nella piastra intermedia è stato fissato il computer portatile e, per una questione pratica, è stato ricavato
nella piastra un cassetto che scorre su due binari. In questo modo è possibile estrarre il computer portatile
semplicemente facendo scorrere il cassetto; inoltre un altro vantaggio deriva dal facile accesso alla zona
motori-batterie semplicemente rimuovendo il cassetto, come mostrato in Figura 2.3.
Fabrizio Cuzzotti
21
Capitolo 2 – Struttura fisica del Robot
Figura 2.3 - Il cassetto scorrevole sul quale è fissato il PC portatile. Con questa
soluzione è possibile accedere facilmente alla zona motori-batterie.
Per la costruzione dei sostegni laterali sono stati utilizzati dei fogli di ergal adeguatamente tagliati e
scaricati del materiale in eccesso, mentre per il fissaggio di tutte le parti sono stati usati dei profili a L, in
diverse misure, in anticorodal. Ergal e anticorodal sono leghe di alluminio utilizzate in diversi settori
industriali, come quello automobilistico o motociclistico, con lo scopo di ridurre i pesi del prodotto finale
senza pregiudicarne la robustezza.
E’ fondamentale evidenziare l’impiego consistente di viti in tutta la struttura: il sistema di bloccaggio dei
motori e quello delle ruote omnidirezionali utilizza un insieme di viti con dadi autobloccanti e rondelle,
come anche i profili a L per l’ancoraggio delle piastre alle paratie laterali, mentre in tutte le altre
situazioni sono state usate delle viti in acciaio con semplici bulloni e rondelle. La completa assenza di
saldature con un totale uso di viteria permette lo smontaggio totale del robot con la possibilità di
trasportarlo in qualsiasi luogo e in qualsiasi condizione.
La realizzazione finale di Rabbiati ha richiesto una modifica sostanziale nella sua forma; il progetto CAD
originale prevedeva una forma prossima a quella di un cubo con un castello per il fissaggio del sistema di
visione. Con questa forma però non è possibile di vedere la palla quando è molto vicina al robot, per cui
la forma della parte superiore è stata modificata: sono state ridotte le dimensioni della terza ed ultima
lastra e si sono piegate le paratie laterali. In questo modo si è riusciti a migliorare la visuale della zona
prossima al robot rendendo possibile il riconoscimento della palla quando questa si trova accanto ad esso.
22
Fabrizio Cuzzotti
Capitolo 2 – Struttura fisica del Robot
Nella Figura 2.4 possiamo osservare rabbiati nella sua forma finale. Si possono notare: il cassetto
estraibile su cui è montato il PC, il Kicker in fibra di carbonio, le paratie laterali piegate per migliorare la
visuale e la struttura che costituisce il sostegno per il sistema di visione.
Figura 2.4 - Rabbiati nella sua forma finale
Il Kicker
Per implementare il sistema di calcio si è utilizzato un sistema ad aria compressa, semplice nella sua
realizzazione e sufficiente per il compito che deve svolgere.
L’apertura e la chiusura dei pistoni è gestita da due elettrovalvole comandate a loro volta dalla scheda di
controllo di basso livello.
Con questo sistema si consuma aria sia per calciare la palla, sia per effettuare il ritorno del kicker; i
pistoni sono dotati di due entrate per l’aria, una posteriore che consente all’aria di entrare nel pistone e
obbliga la fuoriuscita dello stelo e una in prossimità della testa del pistone che permette all’aria entrante
di riportare in posizione iniziale lo stelo.
Il passaggio dell’aria, dalle bombole fino ai pistoni, avviene tramite piccoli tubi di gomma.
Una possibile fonte di problemi con questo sistema sono le perdite d’aria che si possono avere nei punti in
cui i tubi si collegano con le elettrovalvole e i pistoni. Un altro accorgimento per evitare un’eccessiva
dispersione d’aria è quello di avere i tubi più corti possibili.
Fabrizio Cuzzotti
23
Capitolo 2 – Struttura fisica del Robot
Il sistema idraulico di Rabbiati presenta i seguenti vantaggi:
•
non eccessivamente costoso;
•
facile e rapido nella sua costruzione;
•
relativamente leggero;
•
possibilità di calciare ripetutamente.
Presenta anche degli svantaggi:
•
limitata autonomia;
•
limitata potenza;
•
possibilità di perdite d’aria;
•
deve essere ricaricato al termine di ogni tempo.
Dai test effettuati, durante le partite di RoboCup 2003, possiamo dire che il sistema di calcio utilizzato su
Rabbiati è risultato essere sufficiente: in definitiva, il portiere deve parare e respingere la palla e l’utilizzo
di sistemi più potenti e sicuramente più complessi renderebbe il robot unicamente più pesante.
24
Fabrizio Cuzzotti
Capitolo 2 – Struttura fisica del Robot
IMPIANTO ELETTRICO
In questo paragrafo viene descritta la progettazione e la realizzazione dell’impianto elettrico del robot. Il
robot monta un Tablet PC per le funzionalità di alto livello che è energeticamente autosufficiente, ma che
è stato comunque collegato, attraverso un regolatore di tensione, alle batterie del robot per prolungarne
l’autonomia. Le problematiche principali riscontrate riguardano l’alimentazione della logica di basso
livello e della telecamera. Sono stati analizzati diversi tipi di circuiti che prendono in considerazione
configurazioni di batterie diverse: batterie per logica e motori separate o un unico pacco batterie per
entrambi, con diversi tipi di circuiti atti allo smorzamento dei disturbi elettrici introdotti dai motori. Per
realizzare un circuito di alimentazione stabile e privo di disturbi per la logica di controllo e la telecamera
sono stati valutati anche diversi tipi di stabilizzatori e DC/DC Converter, tenendo conto dell’assorbimento
di corrente dei diversi dispositivi. L’impianto elettrico è stato realizzato dando la possibilità, grazie ad
interruttori distinti, di alimentare separatamente i diversi settori funzionali del robot: l’elettronica di
potenza dei motori, il circuito di comando dell’azionamento dei kicker, la logica di controllo dei motori e
la telecamera. Ognuno di questi dispositivi può essere quindi alimentato indipendentemente dall’altro.
Questa proprietà si è resa particolarmente utile durante la fase di testing, in cui le varie parti del robot
potevano essere testate contemporaneamente e indipendentemente l’una dall’altra.
Schema generale
In Figura 2.5 è mostrato lo schema elettrico generale del robot.
Gli elementi principali che compongono l’impianto elettrico sono:
•
Il Pacco Batterie a 24 Volt;
•
La scheda di alimentazione della Logica di controllo di basso livello;
•
La scheda di alimentazione del PC;
•
La logica di controllo di basso livello (che vedremo in dettaglio nel Capitolo 3);
•
La telecamera iBot della Orange Micro;
•
Il PC;
•
La scheda di comando dei kickers e le elettrovalvole;
•
I servocontrollori di potenza dei motori e i motori stessi;
•
La ventola di raffreddamento dei motori.
Fabrizio Cuzzotti
25
Capitolo 2 – Struttura fisica del Robot
Figura 2.5 - Lo schema elettrico di Rabbiati.
26
Fabrizio Cuzzotti
Capitolo 2 – Struttura fisica del Robot
Pannello di comando
Come possiamo notare dallo schema in Figura 2.5 l’impianto elettrico è diviso in 4 diversi blocchi
funzionali alimentabili separatamente tra di loro per mezzo di diversi interruttori. Questi interruttori sono
dotati di spie luminose che consentono di vedere in ogni momento se il blocco funzionale è alimentato o
meno. Nell’impianto elettrico sono previsti inoltre dei fusibili per proteggere i circuiti da eventuali
cortocircuiti accidentali. Tutti questi elementi, e altri ancora, sono raccoliti in un pannello di comando
posto sul lato posteriore del robot, che possiamo vedere in Figura 2.6.
Fusibile alimentatore PC
Figura 2.6 - Il pannello di comando del robot
Partendo da sinistra possiamo vedere:
•
Il Connettore “Chiave”: togliendo questo connettore si separano elettricamente le batterie dal
resto del circuito. Al posto del connettore viene collegato un cavo che consente di ricaricare le
batterie direttamente a bordo del robot e contemporaneamente di alimentare separatamente il
robot grazie ad un alimentatore a terra;
•
L’interruttore dei motori: questo interruttore di potenza alimenta i motori ed i servocontrollori di
potenza;
•
Il fusibile della parte di potenza: questo fusibile Ultra-Fast da 16A è messo a protezione della
sezione di potenza del robot, e riguarda i motori e la scheda di comando del Kicker;
Fabrizio Cuzzotti
27
Capitolo 2 – Struttura fisica del Robot
•
L’interruttore del Kicker: questo interruttore consente di alimentare la scheda di comando del
Kicker;
•
L’interruttore della Logica: questo interruttore consente di alimentare la logica di controllo di
basso livello del robot;
•
Il fusibile della Logica: questo fusibile Ultra-Fast da 3,15A è messo a protezione della logica di
controllo di basso livello e della telecamera;
•
L’interruttore della Telecamera: questo interruttore consente di alimentare la telecamera del
robot;
•
Il reset della logica: questo pulsante consente di resettare la logica di controllo di basso livello.
La freccia in Figura 2.6 indica l’alloggiamento, interno alla scocca del robot, del fusibile della scheda di
alimentazione del PC. Anche questo fusibile è di tipo Ultra-Fast da 3.15A.
Pulsante di emergenza
Rabbiati è dotato di un pulsante di
emergenza che interrompe l’alimentazione
dei
motori
in
malfunzionamenti
caso
o
di
guasti,
comportamenti
imprevisti e pericolosi del robot.
Come possiamo vedere in Figura 2.7, il
pulsante è posto nella parte posteriore del
“Fungo” di emergenza
robot sopra il pannello di comando.
Il
“fungo”,
evidenziato
nel
cerchio,
originariamente era di colore rosso ma è
stato
colorato
di
nero
per
via
del
regolamento di RoboCup che impone ai
Figura 2.7 - Il “fungo” di emergenza di Rabbiati
robot di essere prevalentemente di questo
colore.
Ventola di raffreddamento
Per garantire la corretta ventilazione dell’interno del robot, viene utilizzata una ventola posta sopra i
motori. Questa ventola da 24V è collegata, assieme ai motori, direttamente al pacco batterie ed assicura il
ricircolo dell’aria all’interno del robot. Essa è montata al centro delle batterie e spinge l’aria forzandola a
passare sui motori per poi uscire lateralmente verso le ruote.
28
Fabrizio Cuzzotti
Capitolo 2 – Struttura fisica del Robot
Le batterie
Il sistema di alimentazione di Rabbiati è costituito da un pacco batterie al piombo, in grado di garantire
energia elettrica per l’alimentazione dei motori, dell’elettronica di controllo (movimento e kickers), della
telecamera e del Tablet PC.
Ogni batteria è da 12V in grado di fornire 7.2Ah. Durante un torneo ufficiale RoboCup o durante
manifestazioni fieristiche, come quelle a cui abbiamo partecipato, può capitare che si giochino più partite
consecutivamente, intervallate da solo mezz’ora di tempo che non consente di effettuare una ricarica
completa. Da questa situazione, si nota come il consumo dell’energia elettrica e la sua gestione costituisca
una problematica di progetto rilevante.
Capacità
La capacità C della batteria [Ah] è il prodotto tra la corrente scaricata (espressa in ampère) e il tempo che
passa prima che la tensione finale di scarica sia raggiunta (espressa in ore).
La capacità varia in accordo con l’intensità della corrente in uscita. La capacità è convenzionalmente
calcolata scaricando la batteria ad una temperatura costante di 20-25 gradi centigradi, in modo che
raggiunga una tensione finale di 1.75V per cella dopo 20 ore.
I collegamenti
Uno dei problemi affrontati in fase di progettazione è stato quello del collegamento delle batterie. Per le
proprie esigenze energetiche Rabbiati attualmente monta 6 batterie da 12V – 7,2Ah della FIAMM-GS.
Sono state prese in considerazione 3 diverse configurazioni per il collegamento delle batterie ai
dispositivi di potenza (motori, kicker) e di controllo (logica, telecamera, PC).
Vediamole in dettaglio:
•
Batterie Separate per Logica e Potenza:
Figura 2.8 - Configurazione con batterie separate
Questa configurazione, mostrata in Figura 2.8, prevede due diversi pacchi batterie per logica e
controllo. In questo modo si evita il problema dei disturbi introdotti nell’alimentazione da parte
Fabrizio Cuzzotti
29
Capitolo 2 – Struttura fisica del Robot
dei dispositivi di potenza che causerebbero seri problemi alla logica di controllo. L’unico
inconveniente di questa configurazione è che le batterie di logica e potenza si scaricano in
maniera diversa e non possono essere ricaricate contemporaneamente.
•
Pacco Batterie Unico con Condensatore:
Figura 2.9 - Configurazione con batteria unica e condensatore
Questa configurazione, mostrata in Figura 2.9, consente una scarica uniforme del pacco batterie e
permette la ricarica contemporanea di tutte le batterie che lo compongono. Un inconveniente di
questa configurazione sono i disturbi introdotti nell’alimentazione dall’elettronica di potenza,
come picchi o cali di tensione. Per limitare gli inconvenienti che questo fenomeno potrebbe
causare alla logica di controllo, è stato introdotto un condensatore di grande capacità collegato
vicino all’alimentazione della logica. Questo condensatore, fungendo da filtro passa-basso,
smorza i picchi di tensione che potrebbero danneggiare i circuiti della logica.
•
Pacco Batterie Unico con Condensatore e Diodo:
Figura 2.10 - Configurazione con batteria unica, condensatore e diodo
In questa configurazione, mostrata in Figura 2.10, oltre al condensatore di grossa capacità, è
stato introdotto anche un diodo che non consente la scarica del condensatore nel caso di
30
Fabrizio Cuzzotti
Capitolo 2 – Struttura fisica del Robot
improvvisi picchi di assorbimento di corrente da parte dei motori. Con questa configurazione, la
tensione di alimentazione della logica è assicurata da cali improvvisi che potrebbero causare
malfunzionamenti nei circuiti.
Per l’alimentazione di Rabbiati è stata utilizzata quest’ultima configurazione. Come vedremo in seguito il
diodo ed il condensatore sono stati montati direttamente sulle schede di alimentazione di logica e PC
(DS1 tipo P600A e C1 da 3300uF). Con questa configurazione è possibile ricaricare le batterie
direttamente a bordo del robot grazie ad un unico cavo che collega il robot ad un caricabatterie a terra.
Abbiamo visto che la rete costituita da diodo e condensatore è sufficiente a garantire la protezione dai
disturbi elettrici che possono causare problemi alla logica.
Come abbiamo detto in precedenza il pacco batterie di Rabbiati è composto da 6 batterie da 12V l’una.
Per poter raggiungere la tensione di 24V necessaria per l’alimentazione del robot, le 6 batterie sono state
collegate tra loro in modo da formare tre serie da due batterie l’una ed infine le tre serie sono state
collegate tra loro in parallelo, come mostrato in Figura 2.11.
Polo Positivo
Polo Negativo
alla “Chiave”
24V
Figura 2.11 - Collegamenti del pacco batterie di Rabbiati
Le batterie sono disposte all’interno del robot come mostrato in Figura 2.12(a). Al centro delle batterie è
montata la ventola di raffreddamento dei motori. I collegamenti elettrici delle batterie sono stati effettuati
tramite connettori Faston doppi che non consentono l’inversione accidentale della polarità. Questi
connettori, mostrati in Figura 2.12(b), sono collegati tra loro in modo da rendere ogni batteria
scollegabile indipendentemente dalle altre e facilmente estraibile dal lato posteriore del robot.
Fabrizio Cuzzotti
31
Capitolo 2 – Struttura fisica del Robot
Ventola
raffreddamento
motori
Connettori
Faston doppi
(a)
(b)
Figura 2.12 - (a) Disposizione delle batterie all’interno del robot;
(b) Connessione delle batterie all’impianto elettrico
Assorbimento di corrente del robot
È stato misurato l’assorbimento di corrente da parte dei dispositivi che fanno parte dell’impianto elettrico:
•
Telecamera: da 67.4mA fino a 111.1mA durante la cattura delle immagini;
•
Tablet PC: da 650mA fino a 830mA durante l’esecuzione del programma robot. L’assorbimento
sale fino a 2A durante la ricarica della batteria a bordo del tablet;
•
Logica di controllo di basso livello: 146mA a servocontrollori abilitati, cioè durante il normale
funzionamento del robot in partita;
•
Servocontrollori di potenza del robot: da 210mA fino a 254mA con i motori fermi in controllo;
•
Ventola di raffreddamento motori: 130mA;
•
Scheda di comando kicker: da 270mA fino a 464mA in condizioni di gioco, cioè ad elettrovalvole
eccitate (corrente singola elettrovalvola: 97mA);
•
Pannello di comando: la corrente assorbita dal pannello di comando per alimentare le spie
luminose poste su di esso (5 spie, 4 sul pannello + chiave) è di 50mA.
•
Motori: Per i motori non è stato possibile effetturare una misura precisa in quanto il consumo di
corrente dipende dai movimenti compiuti durante la partita. Per stimare questo consumo è stato
modellato un ciclo di lavoro composto da 18 movimenti “tipo” che il robot può effettuare durante
il normale svolgimento di una partita. Il ciclo dura 18,1 secondi e comprende accelerazioni
violente, tuffi e spostamenti lenti più o meno brevi. Il ciclo è stato poi più volte ripetuto
alternandolo a momenti di quiete per effettuare una stima del consumo di corrente durante un
tempo di una partita ufficiale RoboCup, la cui durata è di 10 minuti. Sappiamo che il robot
raggiunge la sua velocità massima di 1.5m/s in circa 0.3s percorrendo in accelerazione uno spazio
di circa 30cm e che, in accelerazione (o decelerazione), consuma il massimo della corrente che,
32
Fabrizio Cuzzotti
Capitolo 2 – Struttura fisica del Robot
secondo il modello matematico realizzato in fase di progettazione, e di circa 8A per motore.
Quando il motore è a regime di velocità in controllo si stima che assorba una corrente di circa 1A
(stima pessimistica).
Sapendo questo vediamo ora i 18 spostamenti previsti nel ciclo di lavoro, rappresentati in Figura
2.13, con le correnti e le cariche in gioco ricordando che 1 Ampère =
1 Coulomb
1 Secondo
:
Rabbiati
1
2
4
6
3
5
7
8
9
10
12
13
14
Dx ½ Max Velocità
Dx Max Velocità
Sx Max Velocità
Stop
16
11
15
17
18
Figura 2. 13 – Spostamenti effettuati durante il ciclo di lavoro
1. Spostamento laterale di 30cm alla massima velocità: prevede un’accelerazione per 15cm e
una decelerazione per 15cm compiuti in circa: 0.15s + 0.15s = 0.3s. Dato che durante lo
spostamento il robot è costantemente in accelerazione o decelerazione la corrente assorbita è
sempre di 8A. La carica consumata in questo tratto è di 2.4 Coulomb (C);
2. Spostamento laterale di 60cm alla massima velocità: prevede un’accelerazione per 30cm e
una decelerazione per 30cm compiuti in circa: 0.3s + 0.3s = 0.6s. Dato che durante lo
spostamento il robot è costantemente in accelerazione o decelerazione la corrente assorbita è
sempre di 8A. La carica consumata in questo tratto è di 4.8C;
3. Spostamento laterale di 60cm alla massima velocità: prevede un’accelerazione per 30cm e
una decelerazione per 30cm compiuti in circa: 0.3s + 0.3s = 0.6s. Dato che durante lo
spostamento il robot è costantemente in accelerazione o decelerazione la corrente assorbita è
sempre di 8A. La carica consumata in questo tratto è di 4.8C;
Fabrizio Cuzzotti
33
Capitolo 2 – Struttura fisica del Robot
4. Tuffo di 115cm alla massima velocità: prevede un’accelerazione per circa 30cm compiuti in
circa 0.3s, un tratto di 55cm alla massima velocità compiuti in circa 0.35s e un tratto in
decelerazione di 30cm compiuti in circa 0.3s. In accelerazione e decelerazione abbiamo
quindi un consumo di 8A per 0.3s + 0.3s = 0.6s con una carica consumata di 4.8C. A questo
valore va sommato il consumo di corrente per il tratto a velocità costante che è di 1A per
0.35s con una carica consumata di circa 0.35C. La carica totale utilizzata in questo tratto è
quindi pari a 4.8C + 0.35C = 5.15C;
5. Spostamento laterale di 30cm alla massima velocità: prevede un’accelerazione per 15cm e
una decelerazione per 15cm compiuti in circa: 0.15s + 0.15s = 0.3s. Dato che durante lo
spostamento il robot è costantemente in accelerazione o decelerazione la corrente assorbita è
sempre di 8A. La carica consumata in questo tratto è di 2.4C;
6. Spostamento laterale di 60cm alla massima velocità: prevede un’accelerazione per 30cm e
una decelerazione per 30cm compiuti in circa: 0.3s + 0.3s = 0.6s. Dato che durante lo
spostamento il robot è costantemente in accelerazione o decelerazione la corrente assorbita è
sempre di 8A. La carica consumata in questo tratto è di 4.8C;
7. Spostamento laterale di 60cm alla massima velocità: prevede un’accelerazione per 30cm e
una decelerazione per 30cm compiuti in circa: 0.3s + 0.3s = 0.6s. Dato che durante lo
spostamento il robot è costantemente in accelerazione o decelerazione la corrente assorbita è
sempre di 8A. La carica consumata in questo tratto è di 4.8C.
8. Spostamento laterale di 60cm alla massima velocità: prevede un’accelerazione per 30cm e
una decelerazione per 30cm compiuti in circa: 0.3s + 0.3s = 0.6s. Dato che durante lo
spostamento il robot è costantemente in accelerazione o decelerazione la corrente assorbita è
sempre di 8A. La carica consumata in questo tratto è di 4.8C;
9. Spostamento laterale di 2m a mezza velocità (0.75m/s): questo spostamento prevede una fase
di accelerazione di circa 0.15s per 15cm per raggiungere la velocità di 0.75m/s, un tratto a
questa velocità della lunghezza di circa 170cm per circa 2.5s ed una decelerazione simmetrica
all’accelerazione di circa 0.15s per 15cm. Nelle fasi di accelerazione e decelerazione il
consumo di corrente è pari a 8A per 0.15s + 0.15s = 0.3s con un consumo di carica di circa
2.4C. Nel tratto a velocità costante il consumo è di circa 1A per 2.5s con un consumo di
carica di 2.5C. La carica totale utilizzata in questo tratto è quindi pari a 2.4C + 2.5C = 4.9C
10. Spostamento laterale di 30cm alla massima velocità: prevede un’accelerazione per 15cm e
una decelerazione per 15cm compiuti in circa: 0.15s + 0.15s = 0.3s. Dato che durante lo
spostamento il robot è costantemente in accelerazione o decelerazione la corrente assorbita è
sempre di 8A. La carica consumata in questo tratto è di 2.4C;
11. Spostamento laterale di 60cm alla massima velocità: prevede un’accelerazione per 30cm e
una decelerazione per 30cm compiuti in circa: 0.3s + 0.3s = 0.6s. Dato che durante lo
34
Fabrizio Cuzzotti
Capitolo 2 – Struttura fisica del Robot
spostamento il robot è costantemente in accelerazione o decelerazione la corrente assorbita è
sempre di 8A. La carica consumata in questo tratto è di 4.8C;
12. Tuffo di 3m alla massima velocità: questo spostamento prevede una fase di accelerazione di
circa 0.3s per 30cm per raggiungere la velocità di 1.5m/s, un tratto a questa velocità della
lunghezza di circa 240cm per circa 1.6s ed una decelerazione simmetrica all’accelerazione di
circa 0.3s per 30cm. Nelle fasi di accelerazione e decelerazione il consumo di corrente è pari
a 8A per 0.3s + 0.3s = 0.6s con un consumo di carica di circa 4.8C. Nel tratto a velocità
costante il consumo è di circa 1A per 1.6s con un consumo di carica di 1.6C. La carica totale
utilizzata in questo tratto è quindi pari a 4.8C + 1.6C = 6.4C;
13. Spostamento laterale di 2m a mezza velocità (0.75m/s): questo spostamento prevede una fase
di accelerazione di circa 0.15s per 15cm per raggiungere la velocità di 0.75m/s, un tratto a
questa velocità della lunghezza di circa 170cm per circa 2.5s ed una decelerazione simmetrica
all’accelerazione di circa 0.15s per 15cm. Nelle fasi di accelerazione e decelerazione il
consumo di corrente è pari a 8A per 0.15s + 0.15s = 0.3s con un consumo di carica di circa
2.4C. Nel tratto a velocità costante il consumo è di circa 1A per 2.5s con un consumo di
carica di 2.5C. La carica totale utilizzata in questo tratto è quindi pari a 2.4C + 2.5C = 4.9C;
14. Spostamento laterale di 60cm alla massima velocità: prevede un’accelerazione per 30cm e
una decelerazione per 30cm compiuti in circa: 0.3s + 0.3s = 0.6s. Dato che durante lo
spostamento il robot è costantemente in accelerazione o decelerazione la corrente assorbita è
sempre di 8A. La carica consumata in questo tratto è di 4.8C;
15. Spostamento laterale di 30cm alla massima velocità: prevede un’accelerazione per 15cm e
una decelerazione per 15cm compiuti in circa: 0.15s + 0.15s = 0.3s. Dato che durante lo
spostamento il robot è costantemente in accelerazione o decelerazione la corrente assorbita è
sempre di 8A. La carica consumata in questo tratto è di 2.4C;
16. Spostamento laterale di 60cm alla massima velocità: prevede un’accelerazione per 30cm e
una decelerazione per 30cm compiuti in circa: 0.3s + 0.3s = 0.6s. Dato che durante lo
spostamento il robot è costantemente in accelerazione o decelerazione la corrente assorbita è
sempre di 8A. La carica consumata in questo tratto è di 4.8C;
17. Spostamento laterale di 30cm alla massima velocità: prevede un’accelerazione per 15cm e
una decelerazione per 15cm compiuti in circa: 0.15s + 0.15s = 0.3s. Dato che durante lo
spostamento il robot è costantemente in accelerazione o decelerazione la corrente assorbita è
sempre di 8A. La carica consumata in questo tratto è di 2.4C;
18. Stop: in questo ciclo di lavoro è previsto un tempo di stop totale di 3s in cui i motori non
consumano corrente.
Fabrizio Cuzzotti
35
Capitolo 2 – Struttura fisica del Robot
Il consumo totale di carica nel ciclo è quindi di 71.75C e dura 18.1s. In un singolo ciclo di lavoro ho
quindi un consumo medio di corrente di circa 3.96A.
In un tempo di gioco di 10 minuti, il robot non è continuamente in parata ma possono esserci anche
lunghe pause nel gioco. Nella totalità dei 600 secondi di durata di un tempo, posso considerare che il
robot starà fermo per 150 secondi e si moverà per 450 secondi. In 450 secondi posso compiere 24,8 ≈
25 cicli di lavora (da 18,1s l’uno) con un consumo totale di
71.75C * 25 cicli = 1793,75C
Se infine divido questo valore per i 600 secondi di durata di un tempo ho una stima della corrente
media assorbita da uno dei motori:
Imedia singolo motore =
1793,75 C
= 2,98A ≈ 3A
600 S
Per entrambi i motori il consumo medio di corrente sarà ovviamente di
Imedia motori = Imedia singolo motore * 2 ≈ 6A
Sarà comunque possibile in futuro verificare la veridicità di questo dato eseguendo dei test
appositi non eseguiti in questo contesto per mancanza di tempo;
Possiamo ora stimare l’assorbimento medio del robot durante una normale fase di gioco:
Imedia robot = Itelecamera + IPC + Ilogica + Iservocontrollori + Iventola + Ikicker + Ipannello di comando + Imedia motori =
= 111.1mA + 830mA + 146mA + 254mA + 130mA + 464mA + 50mA + 6000mA = 7.985A
che sale fino a 9.155A quando la batteria del tablet è in ricarica. Come abbiamo detto prima, la corrente
assorbita dai motori è una stima. La corrente assorbita dal robot senza considerare i motori è di 1.985A
(che sale fino a 3.155A con il tablet in ricarica).
36
Fabrizio Cuzzotti
Capitolo 2 – Struttura fisica del Robot
Scarica delle batterie
Si è presentato il problema di sapere in quanto tempo si scarica il pacco batterie, a seconda che si usino 2,
4, o 6 batterie da 12V - 7,2Ah, e di sapere a che tensione le batterie sono da considerarsi scariche, ed è
quindi necessario ricaricarle per evitare che un’eccessiva scarica le rovini. Sapendo l’assorbimento medio
del robot possiamo calcolare questi dati.
In Figura 2.14(a) e (b) sono rappresentate le curve di scarica delle batterie nel tempo con correnti che
vanno da 0.05 C fino a 2 C , con
C = Capacità nominale della batteria in Ah.
Nel caso di una batteria da 12V con una capacità di 7.2 Ah, per esempio, la corrente di scarica è espressa
in accordo con la seguente formula:
0.05 * C = 0.05 * 7.2 = 0.36 A
oppure
2 * C = 2 * 7.2 = 14.4A
In seguito all’effetto della resistenza interna della batteria, quando la corrente richiesta è alta, la tensione
decresce velocemente durante il processo di scarica.
Fabrizio Cuzzotti
37
Capitolo 2 – Struttura fisica del Robot
(a)
0.3C
(b)
0.75C
0.6C
1.5C
Figura 2.14 - Curve di scarica di una singola batteria
38
Fabrizio Cuzzotti
Capitolo 2 – Struttura fisica del Robot
La resistenza interna delle batterie è puramente teorica e soprattutto variabile nel tempo perché dipende
dalla chimica interna della batteria. Idealmente la resistenza interna sale man mano che la batteria si
scarica fino ad impedire l'erogazione della corrente richiesta quando la batteria è totalmente scarica.
Per avere una indicazione valida dello stato di carica della batteria bisogna misurare la tensione sui suoi
morsetti quando sta erogando la corrente richiesta. Ad esempio: non si ottiene una misura valida se si
ferma il robot e si misura la tensione delle batterie nel momento in cui, essendo fermo, sta assorbendo
meno del solito.
La tensione a cui possiamo considerare la batteria scarica, senza rischiare di rovinarla, non è comunque
sempre uguale. Nella Tabella 1 sono indicate le tensioni minime la disotto delle quali il produttore
raccomanda di non scaricare le batterie per non abbreviare la loro vita e, come possiamo notare, la
tensione finale di scarica varia a seconda della corrente di scarica.
Corrente di scarica
Tensione finale di scarica
Meno di 0.2 C
0.2 C – 0.5 C
0.5 C – 1.0 C
1.0 C – 2.0 C
2.0 C – 3.0 C
Oltre 3.0 C
1.75 V/Cell
1.70 V/Cell
1.60 V/Cell
1.50 V/Cell
1.35 V/Cell
1.00 V/Cell
Tabella 1
I valori nella tabella sono riferiti alla tensione delle singole celle. È interessante notare che a batteria
carica la tensione per ogni singola cella si aggira intorno ai 2,30V/Cell (13,8V totali per batterie da 6 celle
come le nostre). Per batterie da 12V – 7,2Ah composte da 6 celle la tensione finale di scarica varia da
10,5V, se la corrente di scarica è stata inferiore ad 1,44A, fino a raggiungere addirittura i 6V se scaricate
con correnti superiori ai 21,6A.
E’ possibile quindi calcolare il tempo di scarica del pacco batterie del robot e la sua tensione finale di
scarica sapendo che la corrente media assorbita dal robot è di circa 7,985A (9,155A con il tablet in
ricarica), e considerando un pacco batterie con diverse caratteristiche a seconda dell’utilizzo di 2, 4 o 6
batterie:
•
Pacco batterie con 2 batterie (24V – 7,2Ah composto da 12 celle):
Con questa configurazione di batterie verrebbe da dire che il tempo di scarica è di:
Tscarica totale = capacità nom batterie = 7.2 Ah = 0.9 ore ≅ 54 min
assorbimento robot
Fabrizio Cuzzotti
7.985 A
39
Capitolo 2 – Struttura fisica del Robot
Questa è però la scarica totale della batteria che è dannosa per il suo tempo di vita.
Per attenerci alle indicazioni del costruttore e salvaguardare le batterie, dobbiamo considerare i
grafici che abbiamo incontrato in Figura 2.14(a) e (b) e munirci della classica squadretta. Con
questa configurazione di batterie il nostro assorbimento è circa di:
7.985
= 1.1 C
7.2
Secondo la Tabella 1 la tensione finale di scarica sarà di circa: 1.50V * 12 celle = 18V
Possiamo vedere quindi, nel grafico di Figura 2.14(b), che il tempo di scarica “di sicurezza” è di
circa 30 minuti.
(9V a batteria nel grafico di Figura 2.14(b))
Se nell’assorbimento del robot consideriamo anche la ricarica della batteria del PC portatile,
avremo un assorbimento di circa:
9.155
= 1.27 C
7.2
e, sempre secondo il grafico di Figura 2.14(b), il tempo di scarica si aggira intorno ai 25 minuti,
sempre con circa 18V finali. Ricordiamo che comunque la batteria del PC portatile sarà sempre
carica all’inizio del gioco, quindi questo assorbimento non è da considerarsi prolungato nel tempo
ma occasionale.
La tensione finale di scarica non è importante solo per la preservazione delle batterie ma anche
per il corretto funzionamento dei dispositivi del robot. Per il corretto funzionamento del circuito
di alimentazione della logica di controllo la tensione non può scendere sotto i 18V (si veda
Datasheet DC/DC Converter PM30-24T05-12 in Appendice B), mentre per l’alimentatore del PC
portatile la tensione minima raggiungibile è di 23V (si veda Datasheet dell’LM317 voltage
regulator in Appendice B). Se per l’alimentazione della logica di controllo non ci sono eccessivi
problemi, la situazione peggiora per quanto riguarda il circuito di alimentazione del PC portatile:
riferendoci sempre alla Figura 2.14(b) ed utilizzando una squadretta, si può facilmente vedere
che, con questa configurazione di batterie, la tensione scende sotto i 23V dopo appena 15 minuti
circa e le cose peggiorano se consideriamo l’assorbimento ulteriore di corrente dovuto alla
ricarica delle batterie del PC portatile. Con questo carico supplementare, infatti, la tensione delle
batterie scende a 23V dopo appena 10 minuti circa.
Questa configurazione è quindi assolutamente insufficiente per le esigenze energetiche di
Rabbiati.
40
Fabrizio Cuzzotti
Capitolo 2 – Struttura fisica del Robot
•
Pacco batterie con 4 batterie (24V – 14,4Ah composto da 12 celle):
Con questa configurazione di batterie il nostro assorbimento è circa di:
7.985
= 0.55 C
14.4
Secondo la Tabella 1 la tensione finale di scarica sarà di circa: 1.60V * 12 celle = 19,2V
Possiamo vedere quindi, nel grafico di Figura 2.14(b), che il tempo di scarica “di sicurezza” è di
circa 70 minuti.
Se nell’assorbimento del robot consideriamo anche la ricarica della batteria del PC portatile,
avremo un assorbimento di circa:
9.155
= 0.63 C
14.4
e, sempre secondo il grafico di Figura 2.14(b), il tempo di scarica si aggira intorno ai 63 minuti,
sempre con circa 19,2V finali.
Anche in questo caso la tensione finale di scarica è troppo bassa per il circuito di alimentazione
del PC, che ricordiamo non deve scendere sotto i 23V. Sempre con l’uso della squadretta e del
grafico di Figura 2.14(b), possiamo vedere che questa tensione viene raggiunta dopo circa 55
minuti, tempo che scende a 45 minuti considerando l’assorbimento in più per la ricarica delle
batterie del PC.
•
Pacco batterie con 6 batterie (24V – 21,6Ah composto da 12 celle):
Con questa configurazione di batterie il nostro assorbimento è circa di:
7.985
= 0.36 C
21.6
Secondo la Tabella 1 la tensione finale di scarica sarà di circa: 1.70V * 12 celle = 20,4V
Possiamo vedere quindi, nel grafico di Figura 2.14(a), che il tempo di scarica “di sicurezza” è di
circa 95 minuti.
Se nell’assorbimento del robot consideriamo anche la ricarica della batteria del PC portatile,
avremo un assorbimento di circa:
9.155
= 0.42 C
21.6
e, sempre secondo il grafico di Figura 2.14(a) e (b), il tempo di scarica si aggira intorno agli 8085 minuti, sempre con circa 20,4V finali.
Fabrizio Cuzzotti
41
Capitolo 2 – Struttura fisica del Robot
Anche in questo caso la tensione finale di scarica è troppo bassa per il circuito di alimentazione
del PC, che ricordiamo non deve scendere sotto i 23V. Sempre con l’uso della squadretta e del
grafico di Figura 2.14(b), possiamo vedere che questa tensione viene raggiunta dopo circa 80
minuti, tempo che scende a circa 75 minuti considerando l’assorbimento in più per la ricarica
delle batterie del PC.
La massima corrente permessa (cioè di picco) durante il processo di scarica, dipende dal tipo di terminali
che sono usati (faston o vite/bullone). Come regola, è generalmente data come 6 volte la capacità del
pacco batterie.
La scarica delle batterie è un processo elettrochimico tra gli elettrodi e l’acido solforico. Quando la
corrente richiesta è veramente alta o la temperatura è particolarmente bassa, si potrebbe verificare un
aumento della viscosità dell’acido e di conseguenza si avrebbe una diminuzione della capacità, come si
può notare in Figura 2.15.
Figura 2.15 - Effetto della temperatura sulla capacità
Considerazioni finali sulle batterie di Rabbiati
Nel paragrafo precedente abbiamo considerato 3 configurazioni possibili per il pacco batterie:
1. Pacco batterie composto da 2 batterie in serie (24V – 7,2A – 12 celle):
Questa configurazione si è rivelata assolutamente insufficiente alle esigenze energetiche del robot
in quanto si scaricherebbe in un tempo variabile tra i 10 minuti ed i 15 minuti;
2. Pacco batterie composto da 4 batterie, 2 serie da 2 in parallelo (24V – 14,4A – 12 celle):
Questa configurazione si è rivelata sufficiente allo scopo garantendo l’alimentazione al robot per
un periodo che va dai 45 minuti ai 55 minuti: il tempo più di due partite ufficiali;
42
Fabrizio Cuzzotti
Capitolo 2 – Struttura fisica del Robot
3. Pacco batterie composto da 6 batterie, 3 serie da 2 in parallelo (24V – 21,6A – 12 celle):
Questa configurazione è quella attualmente montata su Rabbiati. Garantisce un certo margine di
tempo entro cui il robot viene alimentato senza rischiare alcun tipo di malfunzionamento. Questo
tempo varia tra 75 minuti ed i 80 minuti e garantisce l’alimentazione per più di tre partite
consecutive (20 min. a partita).
Come abbiamo visto nel paragrafo precedente, però, le batterie non vengono mai scaricate completamente
(sempre considerando la preservazione della batteria) e non raggiungono mai la loro tensione finale di
scarica.
Si raggiunge prima, infatti, la tensione di 23V sotto la quale subentrano malfunzionamenti
dell’alimentatore del PC portatile.
Questo limite influisce pesantemente sul possibile impiego del pacco batterie accorciandone il tempo di
utilizzo di circa 15 – 18 minuti dall’effettiva scarica.
Utilizzando un regolatore di tensione migliore, come quello switching utilizzato per la logica, si potrebbe
diminuire la tensione di drop out (differenza tra Vin e Vout) che attualmente è di 3V (il PC è alimentato a
20V).
In questo modo si possono sfruttare le batterie più a lungo dandoci la possibilità di utilizzare la
configurazione n° 2 del pacco batterie. Ad esempio il tempo di utizzo con un dorp out minimo di 1 solo
Volt salirebbe da 45-55 minuti a 60-70 minuti consentendo di togliere 2 batterie (del peso totale di circa 5
Kg) dall’attuale pacco batterie, alleggerendo il robot e rendendolo più agile.
Non alimentando in nessun modo il PC per mezzo del pacco batterie del robot, infine, si riuscirebbe a
sfruttare totalmente la scarica delle batterie (sempre considerando le configurazioni n° 2 e 3) allungando
ulteriormente l’autonomia del robot.
Fabrizio Cuzzotti
43
Capitolo 2 – Struttura fisica del Robot
Scheda di alimentazione della Logica di controllo di basso livello
Per alimentare il circuito di controllo di basso livello, che vedremo in dettaglio nel prossimo capitolo, e la
telecamera del robot, è stato necessario realizzare un circuito regolatore di tensione che producesse le
tensioni necessarie al funzionamento di questi dispositivi. L’alimentatore, inoltre, doveva essere in grado
di erogare tutta la corrente necessaria allo scopo. Le tensioni necessarie sono: +12V, –12V e +5V. La
tensione di +12V serve ad alimentare la telecamera e come tensione di alimentazione/riferimento per i
DAC712P della scheda di controllo. Anche la tensione di –12V serve ai DAC come tensione di
riferimento. La tensione di +5V, infine serve ad alimentare tutti gli altri componenti della scheda di
controllo e la scheda di comando del kicker. Sono stati presi in considerazione diversi circuiti regolatori
di tensione; di seguito riportiamo la spiegazione di due di essi e le scelte effettuate.
In Figura 2.16 è riportato lo schema elettrico del primo circuito realizzato. Questo circuito si basa su 3
diversi sotto-circuiti indipendenti che generano le tensioni desiderate.
Figura 2.16 - Schema elettrico del primo circuito di alimentazione
realizzato per alimentare la logica di controllo di basso livello di Rabbiati
La tensione di + 12V è ottenuta utilizzando un integrato regolatore di tensione di tipo LM7812 e per
ottenere una tansione di +5V si utilizza un LM7805. Per ottenere la tensione di -12V necessaria si utilizza
invece un circuito di tipo switching basato sull’integrato LM2574N-12. Di questo circuito fanno parte
anche il diodo MBR150, un condensatore da 680uF e un induttanza da 68uH (micro Henry).
Questo circuito presenta, però, dei difetti fondamentali: la corrente prodotta dal circuito che genera la
tensione di -12V è limitata a circa 100mA, tipico valore per i circuiti di tipo switching a basso costo, ma
44
Fabrizio Cuzzotti
Capitolo 2 – Struttura fisica del Robot
anche con un assorbimento minore la tensione non resta stabile e sale pericolosamente vicino alla soglia
dei -11.4V necessari ai DAC per funzionare correttamente. Un altro difetto sta nella dispersione di
energia in calore. L’LM7805 e l’LM7812 per regolare la tensione dissipano energia (sotto forma di
calore) in proporzione alla loro tensione di drop out. Per tensione di drop out si intende la differenza tra
Vin e Vout degli integrati regolatori.
•
Per l’LM7812 ho: Vdrop out = Vin – Vout = 24V – 12V = 12V;
•
Per l’LM7805 ho: Vdrop out = Vin – Vout = 24V – 5V = 19V;
La potenza dissipata dipende anche dalla corrente richiesta secondo la formula:
Pdissipata = Vdrop out * I out
che, con una corrente di 1 Ampere raggiunge i 12W per l’LM7812 e i 19W per l’LM7805, un valore
decisamente troppo elevato!
Il secondo circuito è stato realizzato utilizzando un DC/DC Converter professionale di tipo swiching
PM30-24T05-12 della ditta Lambda. Nonostane questo circuito sia di tipo swithing, è in grado di erogare
5A per la tensione di 5V, e 1A per le tensioni di ±12V, più che sufficienti per i nostri scopi, senza la
dissipazione di energia presente nel primo circuito realizzato. Naturalmente il costo per la realizzazione di
questo circuito è circa 10 volte superiore al costo del primo circuito (circa 100 € contro i circa 10 € del
primo circuito).
Figura 2.17 - Schema elettrico del circuito realizzato con il DC/DC Converter PM30-24T05-12
In Figura 2.17 possiamo vedere lo schema eletrico di questo circuito. Il diodo DS1 posto in ingresso e il
condensatore C1 da 3300uF, servono come filtro passa-basso contro i disturbi elettrici ed i picchi generati
dai motori. I Condensatori C2, C3, e C4 servono a stabilzzare ulteriormente la tensione in uscita.
Nella Figura 2.18 possiamo vedere il circuito montato dentro al robot con cui vengono alimentate la
scheda di controllo di basso livello la telecamera e il circuito di comando del kicker.
Fabrizio Cuzzotti
45
Capitolo 2 – Struttura fisica del Robot
Figura 2.18 - La scheda di alimentazione della logica di basso livello del robot.
Scheda di alimentazione PC
Rabbiati monta un Tablet PC della Acer che è energeticamente autosufficiente essendo dotato di batterie
proprie. L’autonomia del Tablet è comunque limitata a circa un'ora e mezza, più che sufficiente per una
partita, ma rischiosa se si partecipa a tornei o manifestazioni in cui il gioco è pressoché continuo durante
la giornata e non consente un ciclo completo di ricarica delle batterie. Per questo motivo si è pensato di
collegare energeticamente il Tablet al pacco batterie del robot per prolungarne l’autonomia. Questo
collegamento consente inoltre di togliere la batteria dal Tablet togliendo peso dal robot.
Si è misurato che l’assorbimento di corrente del Tablet varia da 0,65A fino a circa 0,85A quando è in
esecuzione il processo robot. Lasciando collegata la batteria del Tablet, la corrente richiesta raggiunge i
2A solo durante la ricarica della batteria. La corrente fornita dal pacco batterie del robot è più che
sufficiente essendo composto da 6 batterie da 7,2Ah l’una. La tensione necessaria ad alimentare il Tablet
è di 20V ed è stato quindi necessario realizzare un ulteriore alimentatore per questo scopo visto che il
pacco batterie fornisce una tensione di 24V. In Figura 2.19 possiamo vedere lo schema elettrico ed il
circuito finito.
Figura 2.19 - A sinistra lo schema elettrico dell’alimentatore del PC e a destra il circuito realizzato.
46
Fabrizio Cuzzotti
Capitolo 2 – Struttura fisica del Robot
Il componente base del circuito è l’integrato LM317. Questo integrato è un regolatore di tensione
variabile in grado di erogare una corrente di 1,5A. Questa corrente non è sufficiente ai nostri scopi, per
questo motivo è stato inserito nel circuito un transistor di potenza BD244C di tipo PNP con la funzione
di amplificare la corrente in uscita. Questo circuito è in grado di erogare correnti di 4-5A surriscaldando
molto, però, il transistor di potenza. Come abbiamo visto 2A sono comunque sufficienti. Il diodo DS1
posto in ingresso e il condensatore C1, servono come filtro passa-basso contro i disturbi elettrici ed i
picchi generati dai motori. Il condensatore C2 è collegato vicinissimo all’ingresso dell’LM317 e serve ad
evitare autooscillazioni. Il condensatore C3 serve a rendere perfettamente stabile la tensione sul terminale
regolazione dell’LM317, ed il diodo DS2 serve a scaricare istantaneamente questo condensatore in caso
di cortocircuiti accidentali sui terminali di uscita. Come abbiamo detto in precedenza, l’LM317 è un
regolatore di tensione variabile e grazie alla rete resistiva composta dalle resistenze R1, R2 ed R3 è
possibile ottenere la tensione desiderata a patto che ci siano almeno 3V tra tensione di ingresso e tensione
di uscita (Vdrop
out).
Per ottenere una tensione di uscita di 20V la tensione in ingresso non potrà mai
scendere sotto i 23V. R1 ha un valore fisso di 220Ω e si ottiene la tensione di uscita calcolando il valore
della resistenza equivalente composta da R2 ed R3 come segue:
Requiv = [(Vdesiderata : 1.25) - 1] * 220
nel nostro caso quindi abbiamo:
Requiv= R2 + R3 = [(Vdesiderata : 1.25) - 1] * 220 = [(20 : 1.25) - 1] * 220 = 3.3KΩ.
R3 vale 2.2KΩ mentre R2 è un trimmer da 2.2KΩ che serve per tarare perfettamente la tensione di uscita
al valore di 20V. In Figura 2.20 possiamo vedere su Rabbiati dove è stato montato questo alimentatore.
Tablet
Alimentatore PC
Figura 2.20 - Montaggio dell’alimentatore del Tablet PC
Fabrizio Cuzzotti
47
Capitolo 2 – Struttura fisica del Robot
Scheda di comando Kicker
Il Kicker è comandato dal microcontrollore, montato sulla scheda di controllo di basso livello, attraverso
due porte che non sono in grado di fornire da sole la corrente sufficiente ad azionare le elettrovalvole del
sistema pneumatico di calcio. Per questo motivo è stata realizzata una scheda che permettesse di
amplificare la corrente e di comandare così l’apertura delle elettrovalvole.
In Figura 2.21 possiamo vedere lo schema del circuito e la posizione dentro al robot dove è stato
montato.
Alimentatore PC
Scheda Kicker
Tablet
Figura 2.21 - Schema elettrico della scheda di comando Kicker e la sua posizione all’interno del robot
Per realizzare il circuito sono stati utilizzati due MOSFET (FET1 e FET2 nello schema) di tipo IRF530.
Dato che le elettrovalvole hanno internamente un avvolgimento simile a quello di un relè, sono stati
inseriti i due diodi DS1 E DS2 per proteggere il circuito dai picchi generati durante l’eccitazionediseccitazione delle bobine. Le resistenze R2 ed R4 sono resistenze di pull-up che assicurano il valore
logico alto in ingresso. I piedini del PIC sono collegati direttamente agli ingressi IN Kicker1 ed IN
Kicker2, le resistenze R1 ed R3 servono a limitare la corrente in questi piedini, anche se in realtà
idealmente un mosfet ha un’impedenza d’ingresso infinita. I fet funzionano da interruttori che eccitano
l’elettrovalvola quando gli ingressi IN Kicker sono alti.
48
Fabrizio Cuzzotti
Capitolo 2 – Struttura fisica del Robot
La Scheda di controllo di basso livello, il PC e la Telecamera.
La scheda di controllo di basso livello, la cui
realizzazione sarà descritta in dettaglio nel capitolo
Scheda di controllo
seguente, è montata internamente al robot sulla
Convertitore
USB-Seriale
paratia anteriore, esattamente sotto il PC.
Il collegamento tra scheda di controllo e Tablet PC
avviene attraverso un Convertitore USB-Seriale.
Questa scelta è stata è stata dettata dall’assenza
della porta seriale sul Tablet.
In Figura 2.22 possiamo vedere i collegamenti
della scheda di controllo e il Convertitore USBSeriale. Nella terza ed ultima versione della scheda
Figura 2.22 - Scheda di controllo di basso livello e
Convertitore USB-Seriale
di controllo il convertitore è connesso direttamente
alla scheda, come si vede in Figura 2.22.
Il Tablet è montato su un cassetto estraibile che
consente all’operatore di aprire lo schermo ed
Tablet PC
effettuare eventuali operazioni, per esempio, di
settaggio della telecamera, come si può notare in
Figura 2.23. Il Tablet è collegato alla telecamera
per mezzo di un cavo firewire a 4 poli. La
telecamera Firewire è la iBot della Orange Micro
Telecamera
Firewire
adattata per essere alimentata indipendentemente. Il
cavo di questa telecamera era infatti in origine un
cavo a 6 poli che provvede anche all’alimentazione
del dispositivo. Ora viene alimentata separatamente
a 12V per mezzo dell’alimentatore della logica di
controllo di basso livello. La modifica al connettore
posto sulla telecamera per ottenere l’alimentazione
separata è stata eseguita seguendo gli schemi di
collegamento
dei
cavi
Firewire
riportati
in
Figura 2.23 - Il Tablet PC e la Telecamera
Firewire
Appendice B.
Di
seguito
sono
riportate
le
caratteristiche
principali del dispositivo: Modello: iBOT; Produttore: Orange Micro; BW/color: color; Sensor Size:
640x480 pixel; Bpp: 8; FPS: 30; Sensor: CCD 1/4”; Optics : fixed; IIDC specs: v1.04.
Fabrizio Cuzzotti
49
Capitolo 2 – Struttura fisica del Robot
I motori e i servocontrollori di potenza
I motori utilizzati sono in corrente continua a magneti permanenti e su ciascuno è montata una
trasmissione planetaria. Alla trasmissione è attaccata la ruota motrice mentre, all’estremità opposta del
blocco motore-trasmissione, ovvero sull’asse del motore, è presente un encoder incrementale (Figura
2.24).
Figura 2.24 - Blocco ruota - trasmissione - motore - encoder
Per comandare i motori è necessario disporre dell’elettronica di potenza e dell’elettronica di controllo. Per
motivi di semplicità, per implementare la parte di potenza, sono stati utilizzati due servocontrollori di
potenza commerciali, uno per ciascun motore. Il compito del servocontrollore è quello di svolgere le
funzioni di ponte H e di pilotare il motore in PWM (Pulse Wide Modulation). In Figura 2.25 è mostrato
uno dei servocontrollori di potenza di Rabbiati.
Figura 2.25 - Uno dei servocontrollori di potenza del robot
50
Fabrizio Cuzzotti
Capitolo 2 – Struttura fisica del Robot
Motori (modello RE40-24V), trasmissioni, encoder e servocontrollori sono stati acquistati presso la ditta
Maxon, società fornitrice della N.A.S.A. per il robot Pathfinder, utilizzato per le prime missioni su Marte.
Tra i servocontrollori ed i motori sono collegate due induttanze fornite dal produttore assieme a questi
dispositivi. Una di queste induttanze è mostrata in Figura 2.26. Le induttanze sono montate sulla paratia
anteriore del robot.
Figura 2.26 - Una delle induttanze collegate tra servocontrollori e motori
La Figura 2.27 mostra in dettaglio i collegamenti tra Batterie, Servocontrollori, Induttanze e Motori.
Figura 2.27 - Collegamento tra batterie, servocontrollori, induttanze e motori
Fabrizio Cuzzotti
51