Elettronica applicata e misure
Lezione D2
Gruppo lezioni D2
!
Convertitori D/A
!
1, 2. Struttura ADA completa
La figura rappresenta il sistema di
conversione analogico-digitale-analogico
completo.!
!
!
!
!
!
!
!
!
!
!
!
3. Convertitori DA
I convertitori AD (come tutti i moduli elettronici) sono caratterizzati dai parametri e possono essere
classificati tra loro.!
!
Gli errori lineari sono quelli del guadagno e dell’offset. Si considerano le non linearità integrale e
differenziale e in più anche i parametri dinamici.!
!
La struttura dei convertitori DA è suddivisa tra convertitori a grandezze uniformi e convertitori a
grandezze pesate. Si parla sempre di rete a scala.!
!
Riferimenti bibliografici:!
• D. Del Corso: Elettronica per Telecomunicazioni: cap. 4.2;!
• M. Zamboni: Elettronica dei sistemi di interc. e acq.: cap. 4.1;!
• F. Maloberti: Understanding Microelectr...: Chapt. 7.4.!
!
!
4. Caratteristica di conversione DA
!
La variabile di ingresso (D) è di tipo discreto
(digitale) e deve essere convertita (ricostruita) in
analogico. La caratteristica è una sequenza di ; =
2N punti equispaziati ed allineati.!
!
Nota: non ci interessa tanto come progettare un
convertitore DA, ma ci serve sapere quali sono le
caratteristiche dei diverse DA in modo tale da
scegliere il migliore qualora facessimo il progetto
di un sistema elettronico!!
!
!
A. A. 2013 / 2014
!
!
1 di 20
Elettronica applicata e misure
Lezione D2
5. Caratteristica di conversione
!
Se M = 2N è abbastanza elevato, allora i punti
risultano molto vicini tra loro (fitti) e la caratteristica
assume la forma di una retta continua.!
!
Nota: l’asse D è discreto.!
!
I convertitori digitali analogici possono essere sia
lineari che non lineari. In figura si vede un
convertitore non lineare (in rosso) e un convertitore
lineare (in blu).!
6. Errori di un convertitore DA
!
!
!
Gli errori di conversione DA possono essere classificati in due modi:!
1. errori statici;!
2. errori dinamici.!
!
Gli errori statici sono quelli che interessano un segnale di ingresso di tipo costante e l’errore
interviene in un comportamento a regime e sono esprimibili nel diagramma visto prima che viene
chiamato anche (D, A) dal simbolo degli assi.!
!
Gli errori dinamici invece sono quelli che avvengono in un ambiente transitorio interessano i
segnali di tipo variabile e sono esprimibili come una funzione nel tempo: A(t).!
!
7. Errori statici: analisi in due passi
La caratteristica A(D) ideale è una retta. Nella realtà non lo è, la retta diventa una linea irregolare,
come quella arancione in figura nella sezione 9.!
!
La caratteristica reale non è rettilinea, viene tracciata in modo tale che risulta essere una linea
irregolare. La differenza tra la caratteristica ideale e quella reale viene analizzata in due passi:!
1. da caratteristica reale a retta approssimante (errori di non linearità);!
2. da retta approssimante a retta ideale (errori lineari: offset e guadagno).!
!
!
8. Caratteristica ideale
!
!
A. A. 2013 / 2014
!
!
!
!
!
!
!
!
!
!
!
!
!
!
2 di 20
Elettronica applicata e misure
Lezione D2
9. Caratteristica ideale e reale
!
!
!
!
!
!
!
!
!
!
!
!
!
!
La trascaratteristica reale non
inizia nell’origine e non
termina nello stesso punto
della trascaratteristica ideale.!
10. Nonlinearità e retta approssimante
!
!
!
11. Confronto tra caratteristiche lineari
!
!
!
Visto che la retta non passa per lo zero
avrò un errore di offset. E visto che è
inclinata si avrà un errore di guadagno.
In sostanza passo dalla verde alla
rossa con una traslazione e una
rotazione.!
!
!
!
!
A. A. 2013 / 2014
!
!
!
!
!
3 di 20
Elettronica applicata e misure
Lezione D2
12. Confronto complessivo
!
!
!
!
L'ampiezza della fascia ci da una
idea di quanto si discosta ad al
massimo.!
E si deve creare una retta che
approssima il meglio possibile.!
13. Errori lineari: offset di guadagno
!
!
!
!
!
!
!
!
Il confronto tra una caratteristica ideale e la retta approssimante mette in evidenza gli errori lineari:
offset e guadagno. La retta approssimata non passa per i due seguenti punti:!
1. l’origine (0;0);!
2. [FXR MS che punto è?] (M,S).!
!
La retta approssimante può essere corretta con due parametri, tale metodo è valido per qualunque
dispositivo elettronico in cui si abbia una funzione di trasferimento di tipo lineare.!
!
I due parametri sono: Errore di offset ed Errore di guadagno.!
!
L’errore di offset, chiamato anche errore di fuori-zero, si trova nell’intersezione individuata dall’asse
A con la retta approssimante (vedere la figura della sezione 14).!
!
L’errore di guadagno si esprime come la differenza di pendenza tra la pendenza della caratteristica
ideale e quella della retta approssimante (vedere figura sezione 15).!
!
14. Errore di offset
!
La funzione di trasferimento (FdT) ideale è:!
D = 0 allora A = 0.!
!
Mentre per la FdT reale si ha:!
D = 0 allora A = Voff!
!
Errore di offset:!
ɛOFF = Voff!
!
È come l'offset degli amplificatori operazionali, sono i valori
di fuorizero.!
!
Per correggere l'offset sommo una costante. Mentre per l’errore di guadagno metto qualcosa per
compensare. In qualche modo gli errori di guadagno gli errori di offset si possono correggere. E
non creano gravi problemi.!
!
!
!
A. A. 2013 / 2014
4 di 20
Elettronica applicata e misure
Lezione D2
15. Errore di guadagno
Per la FdT ideale si ha:!
A = K • D!
!
Per quella reale si ha:!
A = K’ • D!
dove K’ = K + ∆K!
!
L’errore di guadagno è rappresentato da:!
ɛ0 = ∆K / K!
16. Errori di non linearità
!
!
!
!
!
Si osservano ora gli errori di tipo non lineare. Innazitutto si deve sapere che si fa un confronto tra
la caratteristica reale e la retta approssimante.!
!
La caratteristica reale (non è rettilinea, ma irregolare) presenta un errore di non linearità che varia
da punto a punto e non può essere compensato.!
!
Si possono definire due non linearità con due parametri: se si guarda al comportamento
complessivo o in altre parole se si si guarda a tutta la retta reale e ideale allora si chiama integrale.
Se invece si prende un intorno in un punto e tali intorno è assai piccolo e si ingrandisce questi
intorno con una lente d'ingrandimento allora si chiama differenziale o meglio dire si va a guardare il
comportamento locale in un punto o intorno.!
!
La non linearità infatti è definita da due parametri:!
1. non linearità integrale (di carattere complessivo);!
2. non linearità differenziale (di carattere locale).!
!
Il massimo scostamento tra la caratteristica reale e la retta approssimante definisce una fascia di
ampiezza definita come ɛnonlin.!
!
Il termine ɛ
!
nonlin
viene chiamato errore di non linearità integrale (vedere sezione 17).!
17. Errore di non linearità integrale
!
!
L'errore di non linearità è un errore in cui per
ogni punto della retta reale c'è un discostamento
particolare rispetto alla retta reale. In altre parole
non esiste nessuna costante negativa o nessuna
costante che si può sommare alla retta ideale
per riparare al scostamento.!
Si potrebbe riparare a tale errore solo e
solamente se si avesse una tabella e a ogni
punto di quella tabella si avrebbe un che cosa
bisogna fare per compensare tale errore ma
questo è assai costoso e quindi si evita.!!
Si può utilizzare tale procedimento (usare una
tabella) sono solamente se bisogna avere un!
A. A. 2013 / 2014
5 di 20
Elettronica applicata e misure
Lezione D2
qualcosa di altissima precisione. In altre occasioni è meglio in sede di concetto cercare di eliminare
o comunque ridurre al minimo l'errore di non linearità e non introdurre nessun tabella.!!
!
Gli errori si possono dare in due modi o utilizzando grandezza analogiche e quindi si utilizza l'asse
delle ordinate (S) e quindi si dà un numero più la sua unità di misura che potrebbe essere ad
esempio la percentuale di fondo scala oppure il volt un'altra grandezza ma comunque analogica.!
Se invece utilizzo l'asse delle ascisse (D) allora si deve dare una misura con una unità di misura
digitale e più in particolare si utilizza il bit meno significativo (LSB).!!
!
18, 19. Errore di non linearità differenziale
Si esamina adesso un piccolo tratto della caratteristica di conversione. I punti della caratteristica
ideale sono spaziati di eguali intervalli AD (sull’asse A), corrispondenti a 1 LSB (asse D). Nella
caratteristica reale invece i punti sono spaziati di un intervallo A’D che è diverso da AD. La
differenza che sussiste tra AD e A’D chiama non linearità differenziale.!
!
!
!
!
!
!
!
!
!
!
!
!
!
20. Non linearità differenziale e monotonicità
L’errore di non linearità differenziale, come già detto prima, è εnld = AD - A’D. Tale errore (εnld)
rappresenta una misura della disuniformità tra gli intervalli AD; se la non linearità differenziale è
maggiore di 1 LSB allora si ha un errore particolare che viene chiamato errore di non monotonicità.!
!
21. Errore di non monotonicità
!
!
!
!
!
!
!
A. A. 2013 / 2014
!
!
!
!
!
!
!
!
!
!
!
!
!
!
6 di 20
Elettronica applicata e misure
Lezione D2
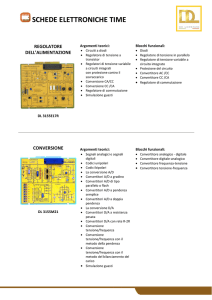
22. Esercizio D2.1: Non linearità differenziale / integrale
Tracciare la caratteristica di conversione per un D/A da 4 bit in cui:!
• εnld = +1/4LSB da 0000 a 0111; !
• εnld = -1/4LSB da 1000 a 1111.!
!
Tracciare la caratteristica di conversione per un D/A da 4 bit in cui:!
• εnld = +1/4LSBquandoLSB=0;!
• εnld =-1/4LSBquandoLSB=1.!
!
Si confrontino le due situazioni.!
!
!
Trascaratteristica ideale:!
!
!
!
!
!
!
!
!
!
!
!
A. A. 2013 / 2014
7 di 20
Elettronica applicata e misure
Lezione D2
Mi allontano sempre di più dalla
caratteristica ideale.
Da 0 7 mi allontano di 1/4 di bit mentre tra 7
e 15 diminuisce lo scostamento.
I puntini rossi tra 7 e 15 è quello che avrei
se non si dovesse diminuire lo
scostamento.
In alto di vede il grafico nella sua interezza.
Freccia verde indica il massimo
scostamento che si ha.!
!
Da 0 a 7 ci si allontana dalla retta ideale di
1/4 di bit mentre tra 7 e 15 diminuisce lo
scostamento e ci si riavvicina.
I puntini rossi tra 7 e 15 è quello che avrei
se non si dovesse diminuire lo scostamento.!
In alto si vede il grafico nella sua interezza. La freccia verde indica il massimo scostamento che si
ha.!
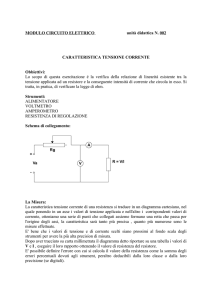
Nel caso in cui la caratteristica di conversione per un D/A da 4 bit non è più come prima dove si
aveva un discostamento tra 0 e 7 e poi tra 8 e 15 ci si riavvicinava. Qui invece ogni LSB cambia in
discostamento.
!
Elettronica applicata e misure!
!
!
Pima ++++++++--------!
adesso+-+-+-+-+-+-+-+!
!
In questa figura in verde è impegnata l'altra
caratteristica di questo esercizio. Poiché a
ogni bit meno significativo c'è una variazione di
scostamento si avrà una specie di linea che va
su e giù rispetto all'altra caratteristica. Mentre
nel caso precedente la retta andava prima
sempre su e poi sempre giù (caso in rosso A).!
Chi ha la massima non linearità non
differenziale più ampia? Ce l’ha B.!
!
!
!
!
!
!
!
23. Tempo di assetto
Nel transitorio, l’uscita del convertitore DA impiega
un tempo TS per portarsi al nuovo valore, tale
tempo si chiama setting time oppure tempo di
assetto.!
!
!
!
!
!
!
A. A. 2013 / 2014
8 di 20
Elettronica applicata e misure
Lezione D2
Quando il convertitore digitale analogico passa
ad esempio da un livello alto a un livello basso
logico il tempo di transizione non è pari a zero ma
ha un tempo diverso da zero. Questo tempo è
chiamato tempo di assetto poiché il segnale del
convertitore digitale analogico si deve assestare
o meglio dire deve transitare da uno Stato
all'altro. In figura si può vedere (la figura di
mezzo) che la linea rossa rappresenta il
cambiamento di stato in cui si ha un
cambiamento di stato ma c'è!
un'oscillazione dovuta a condensatori e induttori.!
Il fondo al disegno in rosso è rappresentato la
tradizione con delle oscillazioni spurie. Queste
oscillazioni potremo durare per molto tempo allora
si può determinare una banda (che si può!
vedere dalla figura (l'ultima figura) raffigurata di questa banda con due righe verde). Se il segnale
non esce da quel due bande allora si dice che il segnale non oscilla o comunque oscilla ma non ha
conseguenze gravi. In questo caso il sistema è del secondo ordine.!
!
!
!
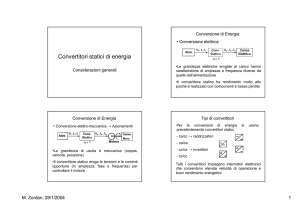
24. Glitch
Nel transitorio l’uscita può portare per breve tempo a
valori molto diversi da quelli iniziale e finale: si tratta di un
errore grave chiamato glitch.!
!
!
Il glitch è un impulso strettissimo dovuto alla seguente
motivazione:!
facendo finta di avere un convertitore digitale analogico
che passa da uno stato di 1000 a uno stato di 0111 allora
si può capire bene cosa avviene: si faccia finta che non
tutti bit cambino stato contemporaneamente ma alcuni
cambiano Stato prima di altri e più in particolare (ad
esempio) cambino prima i bit che da zero diventino uno
allora si ha la situazione che si vede all'atto della figura:!
fase iniziale 1000
fase intermedia 0000
fase finale 0111!
si vede come poiché abbiamo la fase intermedia e questa fase intermedia viene captata dal
convertitore allora abbiamo un impulso come
si vede in figura e poi poiché anche l'ultimo
bit che non è cambiato di stato cambia stato
allora il convertitore preleva la giusta
sequenza ossia la 0111 ma comunque
l'impulso c'è stato è rilevato sebbene sia un
segnale spurio.
per ovviare a questo problema si mette un
filtro passa basso in modo tale da eliminare
le frequenze elevate e facendo così elimino
questi impulsi.!
!
!
A. A. 2013 / 2014
9 di 20
Elettronica applicata e misure
Lezione D2
Rispetto alla precedente si è aggiunto un modulino che è il sample e hold in modo tale che se si ha
un impulso quest'impulso non venga preso dal convertitore digitale analogico poiché questo
modulo " ritarda" il segnale (in alto é indicato con il simbolo x questo ritardo in altre parole si
campiona in un punto giusto e si aspetta un tempo x e in questo tempo si ha l'impulso tuttavia
anche se c'è l'impulso non viene rivelato a causa del ritardo).!
!
25. Origine del glitch
Il termine glitch è usato per indicare un picco breve ed
improvviso (non periodico) in una forma d'onda, causato da un
errore non prevedibile. Per estensione è usato per indicare un
breve difetto del sistema in vari campi di applicazione
dell’elettronica.!
!
Si pensa che la parola inglese glitch derivi dal termine tedesco
glitschen (slittare) e dalla parola yiddish gletshn (scivolare,
pattinare).!
!
Il glitch è dovuto alle differenze nei ritardi di commutazione.
Ritardi diversi generano degli stati transitori che non sono presenti nella sequenza originaria di
valori (per esempio possono essere 1111 oppure 0000 nel caso in cui si voglia transitare da 0111 a
1000).!
!
Questi stati (indesiderati) forzano l’uscita per un periodo di tempo brevissimo verso lo 0 o verso il
fondoscala S (si chiama glitch sulla commutazione del MSB).!
!
I glitch sono presenti nelle commutazioni da x0111 … x1000; la variazione è di 1 LSB, ma nel
transitorio può comparire uno stato anomalo x0000 o x1111.!
!
Il termine spike è (impropriamente) usato nel linguaggio comune per intendere uno sbalzo/picco di
tensione o corrente. Il vocabolo però deriva dall'elettrotecnica dove è usato per indicare
esattamente un "glitch periodico", cioè un glitch che si ripete in ogni ciclo della forma d'onda.!
Le cause di uno spike possono essere: un'interferenza, un loop di terra, l'aliasing, un convertitore
A/D economico.!
!
Un classico glitch audio è il picco prodotto da un cavo con le saldature che stanno per saltare.
Oppure, il suono della puntina di un giradischi che salta sulla traccia, al termine dei dischi in vinile.
Quest'ultimo suono può anche essere imitato da una Drum machine o generato artificialmente da
un software.!
!
Nei videogiochi un glitch è un involontario errore di programmazione che può portare ad un effetto
o comportamento originariamente non voluto. In questa categoria rientrano errori di visualizzazione
grafica per fondali o personaggi, errori nei punti di contatto tra oggetti, freeze o blocchi del
programma, irregolarità o sfalsamento dell'audio ed altri.!
Il "glitching" consiste nella ricerca da parte del videogiocatore di un glitch da sfruttare a proprio
vantaggio. Durante la certificazione di qualità, come quella eseguita dai tester, i glitch devono
essere individuati ed elencati in una relazione da rispedire ai programmatori.!
!
26. Sommario degli errori
Qui sono elencati gli errori che interessano la conversione DA:!
• Errori lineari (guadagno ed offset).!
• Errori di non linearità (non linearità integrale e non linearità differenziale).!
• Parametri dinamici (tempo di assetto e glitch).!
!
Tali errori vengono misurati in diversi modi:!
• in rapporto % con il fondoscala;!
A. A. 2013 / 2014
10 di 20
Elettronica applicata e misure
Lezione D2
• in valore assoluto (mV, …);!
• frazione di LSB (1, ½, ¼, ⅛, …).!
!
27. Lezione D2: Convertitori DA
Si parla ora della struttura dei convertitori. Ci sono due
categorie: a grandezze uniformi e a grandezze pesate. Si
parlerà della rete a scala.!
!
28. Circuiti per convertitori DA
La tecnica base di conversione DA è
quella rappresentata in figura: si esegue
una somma dei termini di grandezze
elementare. Tale somma è controllata dal
modulo D. La somma può essere eseguita
tra sole grandezze uniformi o sole grandezze pesate.!
!
!
29. Grandezze uniformi
Le conversioni basate sulla somma
di grandezze uniformi sono
rappresentabili secondo lo schema
qui a fianco. Ciascuna grandezza è
“grande” quanto le altre e vengono
inserite in quantità pari al valore dell’ingresso digitale. L’uscita è grande D • LSB. !
Per esempio, 9D = 1 + 1 + 1 + 1 + 1 + 1 + 1 + 1 + 1.!
!
!
!
!
30. Grandezze pesate
Diversamente succede nelle
conversioni basate su
grandezze di peso differente,
come nello schema qui a
fianco. Le variabili non
hanno una unica grandezza
fissa uguale per tutte, ma hanno un peso che corrisponde alle ferie potenzae in base 2 o meno (a
seconda del valore 0 o 1 del bit).!
!
Per esempio, un’uscita S • 2i • Di, con 13D • Di e si abbia:!
Peso! 23!
22!
2 1!
2 0!
Valore! 1!
1!
0!
1!
13D = ! 8*1 +! 4*1 +! 2*0 + 1*1.!
!
31. Convertitori a grandezza uniforme
!
Nei convertitori a grandezze uniformi, le grandezze
di riferimento e di uscita sono le correnti. L’uscita è
rappresentata da una corrente IO che è ottenuta
come la somma delle correnti uguali e inserito o
meno a seconda del valore di D.!
A. A. 2013 / 2014
11 di 20
Elettronica applicata e misure
Lezione D2
In questo convertitore vado sommare delle grandezze uguali, le quali provengono ad esempio da
un generatore di tensione e la caduta di tensione da "a creare" della corrente che la prelevo
dall'uscita tale corrente viene generata dalla caduta di potenziale (dalla legge di ohm) delle
resistenze tutte uguali Se si ha una configurazione del tipo 00111, si avranno tre interruttori chiusi
e due aperti in altre parole dove compare lo zero interruttore è aperto dove compare il uno
interruttore è chiuso.!
!
!
Se invece di andare sommare la corrente si va a sommare la tensione si può utilizzare un battitore
di tensione in altre parole come si vede dal circuito si ha in serie delle resistenze collegate ad un
generatore di tensione il quale fornisce una determinata energia che va a dissiparsi sulle
esistenze. Andando spostare la riga (la freccia D) si ha sul morsetto di uscita Vu una differente
tensione a seconda che la freccia sia posizionata più vicino al generatore (come si vede in figura)
oppure se la freccia è più vicina alla massa delle resistenze. Se la freccia e più vicina al bordo
inferiore della figura allora ad esempio avremo una configurazione di tutti zeri (000) è come si vede
dalla figura. Se invece la freccia è attaccata al morsetto che ha la stessa attenzione del generatore
allora si ha una configurazione di tutti!
uno (111).
!
!
32, 33. Convertitori a grandezze pesate
Nei convertitori a grandezze
pesate invece (come prima,
generalmente si usano sempre
correnti) tali grandezze sono
ottenute a partire da una
grandezza di riferimento R e
vengono portate o meno al
sommatore da un banco di
deviatori che sono comandati dai
bit del dato stesso in ingresso D.!
!
Questa tecnica di conversione ha bisogno di resistenze e di autori se si vuole convertire un
segnale che ha più di otto fili la cosa diventa complicata. Sta di fatto che sino a otto fili si usano
questi convertitori mentre quando i figli diventano superiori non si utilizza più questa tecnica. Se si
deve convertire un determinato segnale sia bisogno 2^N-1 fili il -1 sta ad indicare che la
continuazione 000 è una configurazione che non ha bisogno di interruttori e fili poiché è
direttamente collegata a massa.!
!
!
!
Le correnti pesate si ottengono con
una serie di resistenze che a loro
volta sono pure pesate.!
!
C’è un problema: con questo
sistema si ha una forte dinamica
dei valore di R (2N+1.!
!
!
!
!
A. A. 2013 / 2014
!
!
12 di 20
Elettronica applicata e misure
!
Lezione D2
!
!
!
!
!
Se si considera un generatore di
tensione disegnata su carta allora la
corrente disegnate in rosso è costante
mentre se si crea un generatore di
tensione (nel mondo!
reale) allora esiste una resistenza interna del
generatore che viene indicata con R in rosso nel
disegno. Tale resistenza dissiparsi correnti che
circola nel circuito non sia più come se non ci!
fosse e di conseguenza nel partitore di resistenze la corrente cambia. Per di più si deve
considerare il fatto che aggiungendo o togliendo le resistenze!
si ha degli errori a causa dei valori imprecisi delle resistenze. Quindi bisogna cercare in qualche
modo di eliminare o rendere minimi questi errori.!!
!
!
!
34. Convertitore a resistenze pesate
Utilizzando i deviatori è
possibile mantenere
costante il carico sul
generatore di
riferimento, tuttavia la
dinamica dei valori di R
rimane elevata.!
!
Se si prende in!
considerazione il
circuito reale, si ha un
generatore di tensione
che ha al suo interno
una resistenza (come si vede in figura in rosso), tuttavia tale resistenza farà semplicemente cadere
un po' di potenza del generatore di tensione e la corrente che il generatore deve immettere nel
circuito dopo tale resistenza sarà costante (in figura tale corrente è rappresentata come Ir).
Quello che invece varia è la tensione di uscita o meglio dire quanta corrente l'uscita preleva dal
circuito quando gli interruttori sono chiusi.!
!
!
35. Deviatori di corrente e di tensione
I deviatori commutano tra quei punti che
possiedono tutti lo stesso potenziale (si
tratta quindi di deviatori di corrente). Le reti
passive lineari sono dotate del principio di
reciprocità, quindi, quando si scambiano un
ingresso e una uscita non viene a mutarsi la
relazione I(V), cioè si compensano alla pari:!
se I1 = D(V1) allora anche per I2 = D(V2). Ciò
è un vantaggio perché permette di generare
A. A. 2013 / 2014
13 di 20
Elettronica applicata e misure
Lezione D2
altre reti di peso/somma senza particolari problemi.!
!
!
36. Convertitori a grandezze pesate
Dalla rete che si è vista nella
sezione precedente,
scambiando IU / Vr si hanno i
deviatori di tensione i quali
commutano nei punti in cui il
potenziale è differente. Tuttavia
rimane comunque la
problematica della elevata
dinamicità dei valori di R.!
37. Deviatori d tensione o di corrente
!
!
!
!
La figura mostra i deviatori di corrente (tra
punti che hanno eguale tensione).!
!
!
!
!
!
!
!
!
Questa figura mostra invece i deviatori di
tensione, che commutano nei punti in cui la
tensione è differente.!
!
!
!
!
!
In entrambi i casi rimane una forte dinamica dei valori di R.!
!
Se si considera i due circuiti analizzati in
precedenza, si può notare che il primo circuito
analizzato a dei commutatori di corrente
mentre il secondo circuito analizzato (il circuito
in cui si ha invertito l'uscita con l'ingresso) a dei
commutatori di tensione.!
Ora considerando la figura numero 1 si può
osservare più in dettaglio tali commutatori e più
in dettaglio si vede che nella parte in alto si fa
riferimento al circuiti che si sono analizzati "
tempo fa" mentre in basso sono circuiti nei
quali si è invertito l'ingresso con l'uscita.!!
I circuiti nei quali si ha l'interlocutore di
tensione sono i più semplici da realizzare e
sono comunemente associati a circuiti logici
mentre i!
primi (dei quali si ha il commentatori di corrente)!
A. A. 2013 / 2014
14 di 20
Elettronica applicata e misure
Lezione D2
sono più difficili da realizzare.!
Si parla di interruttori di tensione quando si passa da una tensione a un'altra mentre il quantitativo
di corrente rimane invariato quindi è il secondo caso in figura 18.!
Si parla invece di interruttori di corrente quando si passa da un valore di corrente a un'altra come
accade nel caso di numero uno in figura 18 in cui l'interruttore passa da un ramo in cui appunto
circola corrente in un altro ramo in cui la corrente è pari a zero.!
Si può vedere ancora meglio in figura 18 caso due in cui il interruttore passa da un ramo in cui sia
tensione pari a zero a un ramo in cui la tensione è pari o prossima alla tensione del generatore.! !!
!
!
!
38. Rete a scala
I convertitori a grandezze pesate soffrono di questa dinamicità, per cui occorre generare la serie di
grandezze da sommare (le correnti ndr) scalate (proporzionate) secondo le potenze di 2. La
dinamica delle correnti è pari a M 2N.!
!
Le reti di peso viste fino a questo punto richiedono una dinamica di R pari alla dinamica di
corrente; si tratta di sistemi che sono difficili da realizzare in forma integrata (cioè su IC) e si hanno
seri problemi di precisione e stabilità.!
!
Una buona alternativa è rappresentata dai sistemi composta da una rete a scala (ladder) che
permette di ottenere un’ampia dinamica di corrente utilizzando due soli valori di resistenza.!
!
39. Genesi della rete a scala
La corrente nel ramo più a destra viene
divisa a metà e viene aggiunta una
maglia.!
!
Poiché creare resistenze diverse con una
dinamica molto elevata è molto difficile
fare tutto ciò su un circuito integrato allora
si preferisce utilizzare due resistenze:
una R e l'altra 2R. Creare due resistenze!
come descritto adesso è molto più
semplice che realizzare una unica
resistenza con una dinamica molto
elevata.!
!
A. A. 2013 / 2014
Come si vede in figura qui a fianco sia allo
schema circuitale visto in precedenza e la
dinamica delle resistenze è molto elevata. In
basso partendo da sinistra e andando verso
destra ci si costruisce un circuito che alla fine
(alla parte destra) è in grado di simulare il
circuito in alto.!
Partendo dal circuito a sinistra in cui sia una
resistenza da 2R e un generatore di tensione si
passa a un circuito in cui si ha una resistenza da
R e due da 2R. In seguito si passa al circuito più
a destra del quale sono state impiegate ben
cinque resistenze tutte da R o 2R. Quest'ultimo
circuito in qualche modo simula molto bene il
circuito in alto.!
15 di 20
Elettronica applicata e misure
Lezione D2
Peraltro, tale procedimento si può ottenere con un circuito molto complesso e riesce a tarare
opportunamente la corrente. Utilizzando le leggi delle elettrotecnica si può vedere il tale circuito
per l'appunto riesce a tarare molto bene la corrente.!!
!
!
!
!
!
!
!
!
!
40. Altra vista della rete a scala
!
È possibile avere in questo modo una
serie di correnti pesate. !
!
I=V
!
R
/ 2 • R!
La corrente viene via via dimezzata ad
ogni cella R solo di un valore pari a R e
2•R.!
!
!
!
41. Vantaggi della rete a scala
I vantaggi della rete a scala è che tale rete può essere espansa a piacere, si usano solo resistenze
di valroe R o 2•R. Per inserire una rete a scala in un convertitore DA, occorre deviare le corrente
verso massa o verso n nodo di somma a seconda dello stato di ciascun bit.!
!
Con la conversione Norton/Thevenin si possono ottenere deviatori di tensione, scambiando le
corrente e le tensioni (principio di reciprocità) si possono ottenere delle reti che usano daviatori di
tensione.!
!
42. Rete a scala con deviatori di corrente
!
!
!
I deviatori commutano tra punti aventi
lo stesso potenziale.!
!
A. A. 2013 / 2014
!
!
!
!
!
!
!
!
!
16 di 20
Elettronica applicata e misure
Lezione D2
43. Rete a scala con deviatori di tensione
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
44. Esempio D2.1: Uscita di rete a scala
!
!
!
!
!
!
!
!
!
!
!
45. Escita di corrente e di tensione
!
La resistenza di uscita è costante e
i generatore equivalenti di
Thevenin e Norton hanno la sterza
relazione con il modulo D. Da un
circuito con uscita di corrente (ICC)
e Ru costante, si può ottenere un
circuito con uscita di tensione!
46. Rete a scala con uscita di tensione
A. A. 2013 / 2014
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
17 di 20
Elettronica applicata e misure
Lezione D2
!
!
47. Reti di peso capacitive
Le grandezze da sommare possono essere
cariche elettriche (anziché delle correnti). La
rete di peso utilizza una capacità (anziché una
resistenza). La precisione dipende dalla
tolleranza dei rapporti tra le diverse capacità.!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
48. Errori con grandezze pesate
I diversi rami hanno ovviamente pesi diversi:!
• MSB pesa S / 2;!
• MSB-1 pesa S / 4;!
• MSB-2 pesa S / 8;!
• e così via… .!
!
L’errore all’uscita è pari all’errore di ciascun ramo moltiplicato per il peso relativo al ramo in analisi.!
!
Uno steso errore nella grandezza pesata determina errori assoluti differenti in uscita. I rami MSBs
hanno un peso maggiore e devono essere quindi più precisi. !
!
Nota importante: il parametro critico è la non linearità differenziale!!
!
49. Errori nella rete di peso
!
Un convertitore digitale analogico può avere degli errori,
nel grafico a sinistra si può vedere una retta ideale in
blu scuro mentre si ha una retta reale in verde acqua.
Poiché si ha dal grafico sottostante un errore quando si
ha il bit più significativo pari a uno allora si ottiene un
errore complessivo solamente quando quelle bit è pari a
uno. Quindi sia un errore complessivo solo e solamente
nel secondo pezzo del grafico o meglio dire della retta
verde acqua.!
!
!
Nel grafico di fianco si vede solamente la parte dello zero verde che sta dall'altra parte. Difatti si
vede che se si ritorna al grafico precedente in cui si ha un 0 verde e uno verde, si ha una retta
reale e una retta ideale uno sopra l'altro, e proprio quel spezzone di retta si si va ad analizzare.
In altre parole partendo dal grafico più a sinistra e prendendo la parte in cui la retta ideale
combacia con la parte della retta ideale è proprio quel punto in cui si va ad analizzare sull'alto
grafico. Si vede per l'appunto sul nuovo grafico quello che sta più a destra che ogni volta che
A. A. 2013 / 2014
18 di 20
Elettronica applicata e misure
Lezione D2
compare uno 0 la rete ideale combacia con la retta reale mentre ogni volta che compare uno 1 la
rete ideale si discosta darà retta ideale per il semplice fatto che c'è un errore su un bit.!!
Il grafico sottostante mostra appunto quella sezione e mostra il di scostamento causato da quel
bit.!!
!
50. Convertitori DA misti
Le strutture a grandezze pesate sono più semplici (hanno un ordine di complessità o(N) ) e si
hanno precisione più elevante per i rami MSB più grandi.!
!
Le strutture a grandezze uniformi invece sono intrinsecamente monotone e sono più complesse
(ordine o(N2) ).!
!
Esistono anche strutture miste che sfruttano una particolare combinazione che permette di avere
contemporaneamente i vantaggi delle due strutture precedenti. In tali strutture miste i MSBs sono a
grandezze uniformi, mentre i LSBs sono a grandezze pesate.!
!
51. Convertitori DA misti (esempio)
!
In alcuni convertitori digitali analogici si
possono avere delle serie di resistenze
uguali e altre serie di resistenze pesate.!
Come si vede in figura 30, si ha sette
resistenze tuttavia nella figura ci sono sette
resistenze.
!
!
52. Convertitori DA moltiplicativi
Nei convertitori DA moltiplicativi è possibile variare la tensione di riferimento, indicata con VR con
l’appoggio della seguente relazione:!
IO = K·D·VR.!
!
L’operatività è su 1/2/4 quadranti.!
!
I convertitori moltiplicativi DA sono utili in applicazioni nelle quali è richiesto un controllo del
guadagno di amplificatori, una conversione bipolare (inversione del segno della VR) e nei
convertitori AD a rapporto.!
!
53. Controllo di guadagno con DA
!
La figura mostra un amplificatore operazionale con
un convertitore DA in reazione. Il dispositivo DA ha
in uscita la corrente IO = D·VO e deve accettare VR
come una tension variabile e bipolare.!
!
Valgono:!
!
Vi / R = D·VO!
VO = Vi / (R·D)!
!
Al crescere di D, il guadagno diminuisce (dato che
aumenta la corrente in uscita IO).!
!
54. Test finale
A. A. 2013 / 2014
19 di 20
Elettronica applicata e misure
Lezione D2
Come si possono correggere gli errori di offset e di guadagno di un convertitore D/A?!
È possibile correggere gli errori di non linearità?!
Cosa è l’errore di non monotonicità?!
Descrivere il comportamento in transitorio di un convertitore D/A. Come intervenire sul circuito
per ridurre i glitch?!
• Quali sono i difetti delle reti a resistenze pesate?!
• Quali sono i vantaggi delle reti a scala?!
• Quale tipo di errore nella rete di peso può determinare una forte non-linearità differenziale?!
•
•
•
•
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
A. A. 2013 / 2014
20 di 20