Università degli Studi di Perugia
Corso di Laurea in Fisica
Buchi Neri
Laureando:
Stefano Speziali
Relatore:
Prof. Gianluca Grignani
A.A. 2012/2013
Alla mia famiglia.
“Sottile è il Signore..”
Albert Einstein
Sommario
Nel presente lavoro vengono esposti i risultati fondamentali della teoria della
gravitazione su scala relativistica e, in particolare, si studiano una classe di oggetti
previsti dalla teoria stessa: i buchi neri. Dapprima si studiano quei buchi neri che sono
dotati solamente di massa. Si generalizzano poi i risultati al caso di buchi neri che
posseggono anche una carica e un momento angolare.
Indice
1
Richiami di Relatività Generale
1.1 Introduzione . . . . . . . . . . . . . . . . . .
1.2 Vettori e tensori . . . . . . . . . . . . . . . .
1.3 Algebra dei tensori . . . . . . . . . . . . . .
1.4 Derivata covariante e tensore di curvatura
1.5 Metrica . . . . . . . . . . . . . . . . . . . . .
1.6 Simmetrie e derivata di Lie . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1
1
2
4
6
9
12
2
Equazioni di campo di Einstein
16
2.1 Il campo gravitazionale . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.2 Tensore energia impulso . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.3 Equazioni di Einstein . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3
Buco Nero di Schwarzschild
3.1 Soluzione di Schwarzschild . . . . . . . . . . . .
3.2 Collasso gravitazionale di un corpo sferico . . .
3.3 Buchi neri e buchi bianchi . . . . . . . . . . . . .
3.4 Coordinate di Kruskal-Szekeres . . . . . . . . . .
3.5 Singolarità e completezza geodetica . . . . . . .
3.6 Massima estensione analitica . . . . . . . . . . .
3.7 Ipersuperfici nulle . . . . . . . . . . . . . . . . . .
3.8 Orizzonti di Killing . . . . . . . . . . . . . . . . .
Gravità superficiale sulla sfera di Schwarzschild
Normalizzazione della gravità superficiale . . .
3.9 Spaziotempo di Rindler . . . . . . . . . . . . . .
3.10 Accelerazione sull’orizzonte . . . . . . . . . . . .
3.11 Diagrammi di Carter-Penrose . . . . . . . . . . .
3.12 Singolarità nude . . . . . . . . . . . . . . . . . . .
4
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Buchi Neri Carichi
4.1 Soluzione di Reissner-Nordstrom . . . . . . . . . . .
4.2 Singolarità nude in RN . . . . . . . . . . . . . . . . .
4.3 Coordinate di Kruskal in RN . . . . . . . . . . . . .
Collasso a simmetria sferica di un buco nero carico
4.4 Buchi Neri estremi di RN . . . . . . . . . . . . . . .
v
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
21
21
24
27
28
30
31
31
33
34
35
35
37
38
42
.
.
.
.
.
45
45
46
48
52
54
5
Buchi Neri Rotanti
5.1 Teoremi di unicità . . . . . . . . . . . . . . . . .
5.2 Soluzione di Kerr . . . . . . . . . . . . . . . . .
5.3 Singolarità nude nella metrica di Kerr . . . . .
Struttura Causale . . . . . . . . . . . . . . . . .
5.4 Coordinate di EF in Kerr e buchi neri estremi
Velocità angolare dell’orizzonte . . . . . . . . .
Buchi neri estremi . . . . . . . . . . . . . . . . .
5.5 Ergosfera . . . . . . . . . . . . . . . . . . . . . .
5.6 Processo Penrose . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
55
55
57
58
59
61
63
63
64
65
A Esempi svolti
66
A.1 Problema 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
A.2 Problema 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
Notazioni
In questo lavoro adotteremo il sistema di unità naturale.
c
2.998 ×108
m
s
velocità della luce
h
6.626 ×10−34
J·s
costante di Planck
h̄
1.054 ×10−34
J·s
costante di Planck ridotta
e
-1.602 ×10−19
C
carica dell’elettrone
me
9.109 ×10−31
kg
massa dell’elettrone
G
6.677 ×10−11
m3
kg·s2
costante di gravitazione universale
vii
Capitolo 1
Richiami di Relatività Generale
1.1
Introduzione
La teoria Speciale della Relatività ha due limitazioni: in primo luogo, privilegia
una categoria particolare di sistemi di riferimento, quelli inerziali; in secondo
luogo, non descrive i fenomeni gravitazionali. In particolare la gravità di Newton
non è compatibile con il nuovo principio di relatività di Einstein per due
motivi: il primo è che, secondo la relatività speciale, nessuna informazione può
viaggiare più veloce della luce, mentre invece secondo la teoria di Newton la
forza di gravità ha effetto istantaneo; il secondo è che la legge di gravitazione
universale non è invariante rispetto alle trasformazioni di Lorentz, cioè la forza
di gravità non rispetta il nuovo principio di relatività.
È necessaria quindi un’estensione della teoria che, da un lato, non discrimini
tra osservatori inerziali e osservatori accelerati, dall’altro, incorpori la gravità.
Una tale estensione avvenne ad opera dello stesso Einstein in un articolo del
1916, in cui veniva presentata la teoria Generale della Relatività.
Le due limitazioni della relatività speciale sono in realtà collegate: non è
possibile, infatti, descrivere gli effetti della gravità senza prendere in considerazione sistemi di riferimento non inerziali. Uno degli elementi essenziali della
teoria è l’equivalenza fra massa inerziale e massa gravitazionale, che fa si che tutti i
corpi cadano con la stessa accelerazione. L’altro elemento peculiare della teoria
è la nuova concezione tra geometria e fisica: la natura dello spaziotempo è parte
integrante della soluzione del problema del moto. Diceva a tal proposito John
A. Wheeler: “Lo spaziotempo dice alla materia come muoversi; la materia dice allo
spaziotempo come curvarsi.”
Possiamo riassumere, quindi, le idee e i princìpi che sono alla base della
teoria della relatività generale nei seguenti 4 punti:
1
Capitolo 1. Richiami di Relatività Generale
1. Principio di equivalenza. Secondo questo principio la massa inerziale di un
corpo può essere sempre scelta in modo da uguagliare la corrispondente
massa gravitazionale. In tutti gli esperimenti svolti fino ad ora il rapporto
tra massa gravitazionale di un corpo, cioè la massa che compare nell’espressione della forza di Newton, e la sua massa inerziale, cioè la massa
che compare nella seconda legge di Newton, è costante (entro l’errore
sperimentale) e indipendente dal corpo stesso. Ciò implica che nessun
esperimento locale è in grado di distinguere un moto di caduta libera in
un campo gravitazionale da un moto uniformemente accelerato in assenza
del campo. In modo analogo nessun esperimento locale può distinguere
lo stato di quiete in un campo gravitazionale costante da quello che si
osserverebbe in un sistema in moto uniformemente accelerato in assenza
del campo.
2. Principio di covarianza. Nella teoria speciale della relatività tutti gli osservatori inerziali sono equivalenti. Nella teoria generale questo fatto viene
esteso a tutti i tipi di osservatori. Le leggi della fisica hanno quindi la
stessa forma per tutti gli osservatori, inerziali e non inerziali.
3. Principio di corrispondenza. In presenza di campi gravitazionali deboli e
nel limite di basse velocità (rispetto a quella della luce), la teoria generale
deve fornire dei risultati che sono approssimabili dalla teoria della gravità
di Newton. In assenza di campo gravitazionale le predizioni della teoria
generale devono essere in linea con quelli della relatività speciale.
4. Principio di minimo accoppiamento gravitazionale. Questo principio afferma
che nel passaggio dalla teoria speciale a quella generale non bisogna
aggiungere nessun termine che tenga conto, in forma esplicita, della
curvatura dello spaziotempo.
In base a quanto appena detto, è necessario, a questo punto, introdurre
gli elementi essenziali necessari a sviluppare la geometria quadridimensionale
in una forma valida in coordinate arbitrarie. Il linguaggio che più si presta a
questo scopo è quello della geometria differenziale e, in particolare, quello dei
tensori.
1.2
Vettori e tensori
Una varietà differenziabile quadridimensionale M è essenzialmente uno spazio
topologico ricoperto da sistemi locali di coordinate (carte) che associano ad
2
Capitolo 1. Richiami di Relatività Generale
ogni suo punto (o evento) una quaterna x µ = ( x0 , x1 , x2 , x3 ), in modo tale che
nella regione di sovrapposizione di due di queste carte l’applicazione che fa
passare dall’una all’altra sia differenziabile. In particolare, nella regione di
sovrapposizione di due carte, i differenti sistemi di coordinate sono collegati
da una trasformazione generale di coordinate (GCT) x 0µ ( x ). Solo oggetti con buone
proprietà di trasformazione sotto GCT possono essere definiti su una varietà.
Questi oggetti sono i tensori.
Un campo vettoriale controvariante (o tensore di tipo (1, 0) o semplicemente
“vettore”) ξ ( x ) = ξ µ ( x )∂µ è definito in ogni punto di una varietà differenziabile
dalla sua azione su una funzione f
ξ : f → ξ f = ξ µ ∂µ f
(1.2.1)
che definisce un’altra funzione. Questi oggetti generano uno spazio vettoriale
quadridimensionale lineare in ogni punto della varietà chiamato spazio tangente
(1,0)
T p (M). Le funzioni ξ µ ( x ) sono le componenti del vettore rispetto alla base
coordinata {∂µ }.
Un campo vettoriale covariante (o tensore di tipo (0, 1) o “1-forma differenziale”) è un elemento dello spazio duale (a volte chiamato spazio cotangente)
(0,1)
T p (M) e, quindi, un funzionale lineare dello spazio tangente che trasforma
vettori in funzioni. Gli elementi della base duale della base coordinata dei vettori
controvarianti sono, in genere, denotati con {dx µ } e, per definizione,
µ
hdx µ |∂ν i ≡ δν
(1.2.2)
che implica che l’azione di una forma ω = ωµ dx µ su un vettore ξ ( x ) = ξ µ ( x )∂µ
dia come risultato la funzione
h ω | ξ i = ωµ ξ µ
(1.2.3)
Sotto GCT vettori e forme trasformano come trasformano le funzioni, cioè
= ξ ( x ( x 0 )) etc., che implica che le loro componenti, rispetto alla base
coordinata associata, trasformano in accordo con le leggi
ξ 0 (x0 )
ξ 0ρ ( x 0 ) =
e
ωρ0 ( x 0 )
∂x 0ρ µ
ξ ( x ( x 0 ))
∂x µ
∂x µ µ
= 0ρ ω ( x ( x 0 )) .
∂x
3
(1.2.4)
(1.2.5)
Capitolo 1. Richiami di Relatività Generale
Più in generale un tensore di tipo (q,r) può essere definito come un elemento
(q,r )
dello spazio T p (M) dato dal prodotto tensoriale di q copie dello spazio
tangente e r copie dello spazio cotangente. Le sue componenti trasformano in
accordo con la legge
T
0µ1 ...µq
∂x 0µ1
∂x 0µq ∂x σ1
∂x σr ρ1 ...ρq
0
(
x
)
=
.
.
.
.
.
.
T
ν1 ...νr
σ1 ...σq ( x ( x )) .
ρq
0
ν
0
ν
ρ1
r
1
∂x ∂x
∂x
∂x
0
(1.2.6)
Consideriamo ora una curva γ(λ) in M, cioè una mappa da un intervallo
reale in M. Si definisce vettore tangente alla curva γ(λ) nel punto γ(λ0 ) il vettore
d
( dλ
)γ(λ0 ) . Da quanto detto sopra, il vettore tangente a una curva può essere
pensato come l’operatore che mappa ogni funzione f , definita in un intorno di
df
df
γ(λ0 ), in dλ (γ(λ0 )); dλ (γ(λ)) è la derivata di f nella direzione di γ(λ) rispetto
al parametro λ. Esplicitamente si ha
df 1
= lim { f (γ(λ + η )) − f (γ(λ))}
dλ γ(λ) η →0 η
(1.2.7)
Se si utilizza un sistema di coordinate locali in un intorno di γ(λ0 )
dx µ
df
γ ( λ0 ) =
(λ0 )∂µ f (γ(λ0 ))
dλ
dλ
(1.2.8)
Dall’ultima relazione, in particolare, si vede che il vettore tangente a una curva
può essere sempre scritto, rispetto a una base coordinata, come
d dx µ
=
∂µ ,
dλ γ(λ)
dλ
(1.2.9)
µ
dove le dx
dλ sono le componenti del vettore. Approfondiremo in seguito il ruolo
delle curve e, in particolare, delle geodetiche (curve con un ruolo speciale) in
relatività generale.
1.3
Algebra dei tensori
Il prossimo passo nel costruire equazioni che siano invarianti sotto GCT
è quello di stabilire quale sia l’algebra dei tensori, cioè come questi possano
essere combinati per dare altri tensori. In particolare si definiscono
4
Capitolo 1. Richiami di Relatività Generale
1. Combinazione Lineare. Una combinazione lineare di tensori dello stesso tipo
dà, come risultato, ancora un tensore dello stesso tipo. Infatti presi due
tensori di tipo (1,1), A e B, con componenti rispetto alla base coordinata
Aµ ν e Bµ ν , si può definire il tensore T, sempre di tipo (1,1) con componenti
T µ ν , in base alla relazione
T µ ν = aAµ ν + bBµ ν ,
(1.3.1)
dove a e b sono scalari; si dimostra facilmente che le componenti di T
trasformano in accordo con la legge
T 0µ ν =
∂x 0µ ∂x σ ρ
T .
∂x ρ ∂x 0ν σ
2. Prodotto Diretto. È possibile anche moltiplicare due tensori tramite prodotto
diretto (o tensoriale). Moltiplicando un tensore di tipo (q,r) e un tensore di
tipo (l,m) si ottiene un tensore di tipo (q+l,r+m). Se riprendiamo i tensori
dell’esempio precedente possiamo formare un nuovo tensore, R, che ha
componenti date dalla relazione
Rµ ν ρ = Aµ ν Bρ .
Anche in questo caso è possibile dimostrare che le componenti di R
trasformano in accordo con la regola generale (1.2.6).
3. Contrazione. La contrazione di un tensore T di tipo (q,r), con componenti T µ1 ...µq ν1 ...νr , rispetto al primo indice controvariante e il primo indice
covariante è un tensore di tipo (q-1,r-1) le cui componenti sono date da
T µ1 ...µq µ1 ...νr . In generale è possibile contrarre un tensore su una qualsiasi
coppia di indici controvarianti e covarianti.
Queste tre operazioni possono anche essere combinate in vari modi.
Si definisce parte simmetrica di un tensore T di tipo (2,0) il tensore TS che
ha per componenti
1
T (µν) = { T µν + T νµ } .
(1.3.2)
2!
In modo simile, la parte antisimmetrica, TA del tensore T ha per componenti
T [µν] =
1 µν
{ T − T νµ } .
2!
5
(1.3.3)
Capitolo 1. Richiami di Relatività Generale
In generale, le componenti della parte simmetrica o antisimmetrica di un tensore
T verranno denotati con una parentesi tonda o una parentesi quadra intorno
agli indici. Così
T µ1 ...µq (ν1 ...νr ) =
(1.3.4)
1
{somma su tutte le permutazioni degli indici ν1 . . . νr ( T µ1 ...µq ν1 ...νr )}
r!
e
T µ1 ...µq [ν1 ...νr ] =
1
{somma alternante su tutte le permutazioni degli indici ν1 . . . νr ( T µ1 ...µq ν1 ...νr )} .
r!
(1.3.5)
Un tensore è detto simmetrico, rispetto a un insieme di indici controvarianti
o covarianti, se è uguale alla sua parte simmetrizzata su questi indici; è detto
antisimmetrico se è uguale alla sua parte antisimmetrizzata. Per esempio, un
tensore T di tipo (0,2) è simmetrico se T(µν) = Tµν (e quindi T[µν] = 0).
1.4
Derivata covariante e tensore di curvatura
Il calcolo tensoriale su una varietà generica presenta un’importante differenza rispetto al calcolo tensoriale nello spazio di Minkowski. Infatti, le derivate
delle componenti T µ1 ...µq ν1 ...νr di un tensore T generico, non costituiscono più
le componenti di un tensore. Per vedere ciò, prendiamo in considerazione un
campo vettoriale ξ e le sue componenti ξ µ ( x ). Le leggi di trasformazione delle
ξ µ ( x ) sono date dalla (1.2.4). Derivando quest’ultima rispetto a x 0λ si ottiene
∂ξ 0ρ
∂x 0ρ ∂x σ ∂ξ µ
∂2 x 0ρ ∂x σ µ
=
+
ξ .
∂x µ ∂x 0λ ∂x σ ∂x σ ∂x µ ∂x 0λ
∂x 0λ
(1.4.1)
Il primo termine del membro di destra è quello che ci aspetteremmo se le
∂ξ ρ
fossero le componenti di un tensore, mentre il secondo termine è quello
∂x λ
che delude le nostre aspettative. È necessario estendere la nozione di derivata.
Definiamo, quindi, la derivata covariante di un campo vettoriale, la quantità
∇µ ξ ν = ∂µ ξ ν + Γν µρ ξ ρ ,
(1.4.2)
dove Γ è la connessione affine ed è aggiunta alla derivata parziale in modo che la
derivata covariante di un tensore trasformi effettivamente come un tensore.
6
Capitolo 1. Richiami di Relatività Generale
Il fatto che le ∇µ ξ ν siano effettivamente le componenti di un tensore permette
di stabilire quale siano le leggi di trasformazione della connessione. Partendo,
infatti, dall’uguaglianza Γν µρ ξ ρ = ∇µ ξ ν − ∂µ ξ ν , è facile vedere che Γ trasforma
in accordo con
Γ0ν µρ =
∂x 0ν ∂x σ ∂x τ η
∂2 x 0ν ∂x σ ∂x τ
Γ
,
−
∂x η ∂x 0ρ ∂x 0µ τσ ∂x τ ∂x σ ∂x 0ρ ∂x 0µ
(1.4.3)
in particolare si vede che neanche la connessione trasforma come un tensore.
Possiamo inoltre definire la derivata covariante di una 1-forma seguendo un
ragionamento analogo a quello precedente. In particolare
∇µ ων = ∂µ ων − Γλ µν ωλ .
(1.4.4)
È ovvio che queste definizioni possono essere estese a tensori generici. La
∂T ...
derivata covariante rispetto a x ρ di un tensore generico T ... ... è uguale a xρ ... ,
più, per ogni indice controvariante µ, un termine dato da Γµ νρ volte T con µ
sostituito da ν, meno, per ogni indice covariante λ, un termine dato da Γκ λρ
volte T con λ sostituito da κ. Per esempio,
∇ρ T µσ λ =
∂T µσ λ
+ Γµ ρν T νσ λ + Γσ ρν T µν λ − Γκ λρ T µσ κ .
∂x ρ
(1.4.5)
Fino a questo momento non è stata fatta nessuna ipotesi sulla connessione.
D’ora in avanti, invece, richiederemo che essa sia simmetrica, cioè
Γµ ρν = Γµ νρ .
(1.4.6)
In questo contesto le Γ sono anche chiamati simboli di Christoffel.
La combinazione della derivata covariante con le proprietà algebriche definite nella sezione 3 dà risultati simili a quelli della derivazione ordinaria. In
particolare la derivata covariante è un operatore lineare, soddisfa la regola di
Leibniz per il prodotto (diretto) di tensori e, inoltre, commuta con la contrazione.
Consideriamo ora una curva γ(λ) in M e sia V il suo vettore tangente in
ogni punto. Se T è un campo tensoriale di tipo (q,r) definito lungo la curva
γ(λ), si definisce derivata covariante di T lungo γ(λ) la quantità
DT µ1 ...µq ν1 ...νr
dλ
= V ρ ∇ρ T µ1 ...µq ν1 ...νr .
7
(1.4.7)
Capitolo 1. Richiami di Relatività Generale
Se si utilizza un sistema di coordinate locali, in modo che la curva γ(λ) sia deρ
scritta da equazioni del tipo x µ = x µ (λ), allora V ρ = dx
dλ e l’equazione precedente
si riscrive come
DT µ1 ...µq ν1 ...νr
dx ρ
=
∇ρ T µ1 ...µq ν1 ...νr .
(1.4.8)
dλ
dλ
DT µ1 ...µq ν
...ν
1 r
Il tensore T è detto essere trasportato parallelamente lungo γ se
= 0.
dλ
Data una curva γ(λ) con estremi p e s, la teoria delle soluzioni delle equazioni
differenziali ordinarie ci dice che esiste un unico tensore in s ottenuto trasportando parallelamente un dato tensore in p lungo γ. Il trasporto parallelo lungo
(q,r )
(q,r )
γ, quindi, è una mappa lineare da T p (M) a Ts
(M) che preserva tutti i
prodotti tensoriali e contrazioni.
Un caso particolare si ottiene considerando la derivata covariante del vettore
ρ
ρ
tangente stesso lungo γ. La curva γ è detta geodetica se DV
dλ è parallelo a V ,
cioè se esiste una funzione f (anche nulla) tale che
DV ρ
= f Vρ .
dλ
(1.4.9)
Anticipiamo il fatto che l’equazione (1.4.9) corrisponde all’equazione del moto
per una particella di massa m che si muove su γ.
Consideriamo ora il seguente fatto: se si trasporta parallelamente un vettore
ξ definito inizialmente in p lungo la curva γ che termina ancora in p si ottiene
un vettore ξ 0 in p che, in generale, sarà diverso da ξ; se si sceglie una curva
differente γ0 , il nuovo vettore che si ottiene in p è in generale diverso da ξ e
ξ 0 . Ciò è dovuto sostanzialmente al fatto che le derivate covarianti, in genere,
non commutano. Il tensore di curvatura di Riemann dà una misura di questa non
commutatività. Il tensore di Riemann, R, è un tensore di tipo (1,3) e può essere
definito dalla relazione
Rµ νρσ ξ ν = ∇ρ ∇σ ξ µ − ∇σ ∇ρ ξ µ .
(1.4.10)
che vale per ogni campo vettoriale ξ. Valutando esplicitamente il membro di
destra si trova che
Rµ νρσ = Γµ νσ, ρ − Γµ νρ, σ + Γµ ηρ Γη νσ − Γµ ησ Γη νρ .
(1.4.11)
Da questa definizione di evince che il tensore di Riemann ha le seguenti
simmetrie
Rµ νρσ = − Rµ νσρ
(1.4.12)
8
Capitolo 1. Richiami di Relatività Generale
e
Rµ [νρσ] = 0 .
(1.4.13)
Con un calcolo un po’ più elaborato, invece, si verifica che il tensore di Riemann
soddisfa l’identità di Bianchi
Rµ ν[ρσ;λ] = 0 ,
(1.4.14)
dove Rµ νρσ;λ ≡ ∇λ Rµ νρσ .
Un’altra proprietà importante del tensore di Riemann è che il trasporto
parallelo è localmente integrabile (cioè ξ 0 è uguale a ξ per ogni punto p di M)
solo se Rµ νρσ = 0 in ogni punto di M; in questo caso la connessione è detta
essere piatta.
Contraendo il tensore di curvatura, si può definire il tensore di Ricci come
tensore di tipo (0,2) con componenti
R µν = Rλ µλν .
(1.4.15)
Il tensore di Ricci, come si vedrà nel prossimo capitolo, gioca un ruolo
fondamentale nelle equazioni di campo di Einstein.
1.5
Metrica
Per andare avanti nella costruzione del formalismo della relatività generale
abbiamo bisogno di introdurre una struttura sulla varietà: la metrica, cioè un
prodotto interno per i vettori dello spazio tangente (simmetrico e bilineare)
che associ una funzione g(ξ, e) ad ogni coppia di vettori ξ e e. Tutto ciò è
equivalente a definire un tensore g, di tipo (0,2), simmetrico rispetto alle sue
componenti covarianti gµν = g(µν) :
ξ · e ≡ g(ξ, e) = gµν ξ µ eν
(1.5.1)
Il quadrato della norma di un vettore è semplicemente il prodotto del vettore
con se stesso, ξ 2 = ξ · ξ. La metrica è richiesta essere non singolare, cioè
g ≡ det( gµν ) 6= 0
(1.5.2)
e, in virtù del Principio di equivalenza, localmente diagonalizzabile; deve, cioè,
9
Capitolo 1. Richiami di Relatività Generale
essere sempre possibile trovare un sistema di coordinate per cui
gµν = ηµν ≡ diag(−1, +1, +1, +1)
(1.5.3)
In 4 dimensioni si ha che
sign( g) =
g
= −1
| g|
(1.5.4)
La metrica può anche essere utilizzata per stabilire una corrispondenza tra
lo spazio tangente e il suo duale, cioè tra vettori e 1-forme: ad ogni vettore
ξ µ associamo una 1-forma ωµ la cui azione su un qualsiasi altro vettore η µ è
il prodotto di ξ e η, ω (η ) = gµν ξ µ η ν . Ciò implica la relazione tra componenti
ων = ξ µ gµν . È consuetudine indicare questa 1-forme con ξ µ e la trasformazione
da vettori a 1-forme si ottiene “abbassando” l’indice. La metrica inversa può
essere usata come metrica nello spazio cotangente. Le sue componenti sono
le componenti della matrice inversa di gµν e vengono denotati con indici alti.
L’operazione di “innalzamento” può essere definita in modo simile e la consistenza dell’operazione è garantita dal fatto che il duale del duale è lo spazio
vettoriale di partenza. La generalizzazione delle operazioni di “innalzamento”
e “abbassamento” per tensori generici è ovvia.
Con la metrica è possibile anche definire la lunghezza di una curva γ, x µ (λ),
grazie all’integrale
Z
q
s = dλ | gµν ẋ µ ẋ ν | ,
(1.5.5)
γ
dove il punto indica la derivata rispetto a λ. In relatività si è soliti indicare il
quadrato dell’elemento di “distanza” con
ds2 = gµν dx µ dx ν .
(1.5.6)
La segnatura di una metrica in p è il numero di autovalori positivi della
matrice gµν in p, meno il numero di autovalori negativi della stessa matrice.
Una metrica con segnatura 2, ovunque su M, è detta Lorentziana. Con una
metrica Lorentziana tutti i vettori possono essere divisi in tre classi: vettori di
tipo tempo, tipo luce (o nulli) e tipo spazio a seconda che il quadrato della norma
del vettore sia, rispettivamente, negativo, nullo o positivo.
Le equazioni che governano il moto della materia devono essere tali che,
presi due punti (o eventi) p e q di M, è possibile mandare un segnale da p a q se
10
Capitolo 1. Richiami di Relatività Generale
e solo se, questi, possono essere uniti da una curva il cui vettore tangente (non
nullo) è di tipo tempo o luce. Una tale curva è detta essere di tipo tempo o nullo,
rispettivamente. Per una particella di massa m, che si muove su γ, definiamo
il tempo proprio (cioè il tempo che misura un orologio solidale con la particella
stessa) la quantità
p
dτ = −ds2 .
(1.5.7)
Finora abbiamo parlato della connessione e della metrica come strutture
indipendenti e separate dalla varietà. Nella teoria standard della gravitazione la
metrica e la connessione non sono, in realtà, indipendenti. Infatti si assume che
la derivata covariante della metrica sia sempre nulla
gµν;ρ = 0.
(1.5.8)
Non è difficile vedere che la (1.5.8) implica
1
Γµ νρ = gµσ gσν,ρ + gρσ,ν − gνρ,σ .
2
(1.5.9)
Così, la connessione e, quindi, tutte le quantità definite nella sezione precedente,
sono completamente determinate dalla metrica. In particolare, scegliendo un
sistema di coordinate locali per cui gµν si riduca alla forma diagonale (1.5.3), in
un intorno sufficientemente piccolo di un punto p della varietà, la connessione
risulta identicamente nulla e l’equazione delle geodetiche (1.4.9) si riduce (con
una ridefinizione del parametro λ in modo che la f che compare nell’equazione
si annulli) ad essere, semplicemente, l’equazione
dV µ
=0,
dλ
(1.5.10)
che corrisponde all’equazione di un moto rettilineo uniforme nello spazio di
Minkowski (V è la quadrivelocità della particella). Ciò è in linea con il Principio
di Equivalenza, il quale afferma che, localmente, è possibile scegliere un sistema
di coordinate tale da annullare gli effetti della gravità e in cui le leggi del moto
siano quelle della relatività ristretta.
In ultima analisi definiamo il tensore di Riemann completamente covariante
in base alla relazione
R µνρσ ≡ gµλ Rλ νρσ
(1.5.11)
che gode della simmetria
R (µν)ρσ = 0
11
(1.5.12)
Capitolo 1. Richiami di Relatività Generale
come si verifica facilmente dalle relazioni (1.4.11) e (1.5.11). Invece dalle (1.4.12),
(1.4.13) e (1.5.12) si trova che il tensore di Riemann è simmetrico rispetto alle
coppie di indici {µν} e {ρσ }, cioè
R µνρσ = R ρσµν
(1.5.13)
Quest’ultima relazione implica che il tensore di Ricci sia simmetrico
R µν = R νµ .
1.6
(1.5.14)
Simmetrie e derivata di Lie
Sia k un campo vettoriale sulla varietà M e φλ un gruppo di diffeomorfismi
ad un parametro generato da k. In particolare risulta che
dφλ = k φ 0 ( p)
λ
dλ λ0
(1.6.1)
φ ( p) = p
0
con p punto della varietà. Possiamo utilizzare φλ∗ per trascinare un campo
tensoriale T µ1 ...µq ν1 ...νr generico sulla varietà. Il confronto tra T µ1 ...µq ν1 ...νr e
∗ T µ1 ...µq
φ−
ν1 ...νr , per piccoli valori del parametro λ, dà luogo alla derivata di Lie.
λ
Si definisce, infatti, derivata di Lie del campo T µ1 ...µq ν1 ...νr lungo k, la quantità
Lk T
µ1 ...µq
1 ∗
µ1 ...µq
µ1 ...µq
ν1 ...νr = lim { φ−λ T
ν1 ...νr − T
ν1 ...νr }
p
p
p
λ →0 λ
(1.6.2)
Segue immediatamente dalla sua definizione che la derivata di Lie è una mappa
lineare fra tensori dello stesso tipo e che segue la regola di Leibnitz per il
prodotto (diretto) fra tensori. Inoltre, siccome k è il vettore tangente alla curva
integrale di φλ , per una generica funzione abbiamo che
Lk f = k f = kµ ∂µ f
(1.6.3)
Per analizzare l’azione di Lk su un campo tensoriale arbitrario è utile introdurre un sistema di coordinate su M in cui il parametro λ è scelto come uno
delle coordinate. Prendiamo ad esempio λ = x0 , così che k = ∂0 = ∂x∂ 0 . L’azione di φ−λ allora corrisponde alla trasformazione di coordinate x0 → x0 + λ,
mentre x1 , x2 , x3 rimangono fissate. Conseguentemente, la derivata di Lie di
12
Capitolo 1. Richiami di Relatività Generale
T µ1 ...µq ν1 ...νr , in un sistema di coordinate adattate a k, è data da
Lk T
µ1 ...µq
ν1 ...νr
=
∂T µ1 ...µq ν1 ...νr
∂x0
(1.6.4)
Per un campo vettoriale, quindi,
Lk ξ µ =
∂ξ µ
∂x0
(1.6.5)
Calcolando il commutatore fra k e ξ, in base coordinata, si trova che
k, ξ ]µ =
∂ξ µ
∂x0
(1.6.6)
Quindi,
k, ξ ]µ = Lk ξ µ
(1.6.7)
in un sistema di coordinate adattate a k. Tuttavia, entrambe queste quantità sono
definite indipendentemente dal sistema di coordinate, per cui concludiamo che
la relazione (1.6.7) vale sempre.
A partire dalla (1.6.7) e dalle proprietà della derivata di Lie non è difficile
dimostrare che per una 1-forma ων vale
Lk ων = k µ
∂ων
∂kµ
+
ω
µ
∂x µ
∂x ν
(1.6.8)
Infine, per un tensore generico
Lk T
µ1 ···µq
ν1 ···νr
∂T µ1 ···µq ν1 ···νr σ
∂kµ1
λ µ2 ···µq
k −T
− ···
=
ν1 ···νr
∂x σ
∂x λ
∂kµq
∂kη
− T µ1 ···µq−1 λ ν1 ···νr λ + T µ1 ···µq η ···νr ν
∂x 1
∂x
η
∂k
+ · · · + T µ1 ···µq ν1 ···η νr .
∂x
(1.6.9)
Vediamo come la derivata di Lie possa essere utilizzata per trovare le simmetrie di un sistema. Sia γ una curva di tipo tempo con estremi a e b. L’azione
per una particella di massa m che si muove su γ(λ) è
S = −m
Z b
13
a
dτ ,
(1.6.10)
Capitolo 1. Richiami di Relatività Generale
dove τ è il tempo proprio su γ. Grazie a (1.5.6) e a (1.5.7) riscriviamo l’azione
come
Z λ
q
b
(1.6.11)
S = −m
dλ − gµν ẋ µ ẋ ν .
λa
L’equazione del moto della particella si ottiene imponendo che l’azione (1.6.11)
abbia un valore estremale, cioè
δS = 0 .
(1.6.12)
Un semplice calcolo mostra che l’equazione del moto è proprio la (1.4.9), che
può essere riscritta come
ν
ρ
dx µ
d2 x µ
µ dx dx
=
f
,
+
Γ
νρ
dλ dλ
dλ
dλ2
(1.6.13)
con f in questo caso determinata da
dτ
dln| dλ
|
f=
.
dλ
(1.6.14)
Definiamo un’azione equivalente a (1.6.11)
S=
1
2
Z λ
b
λa
dλ e−1 (λ) gµν ẋ µ ẋ ν − m2 e(λ) ,
dove e(λ) è una nuova funzione indipendente. Imponendo che
che
1 dτ
1q
.
− gµν ẋ µ ẋ ν =
e=
m
m dλ
Imponendo, invece, che
δS
δx
(1.6.15)
δS
δe
= 0 si trova
(1.6.16)
= 0 si trova che l’equazione del moto è
D ẋ µ
= e−1 ė ẋ µ ,
dλ
(1.6.17)
analoga alla (1.4.9). Una naturale scelta per il parametro λ è quella per cui la
f nella (1.4.9) o, equivalentemente, il termine di destra dell’equazione (1.6.17)
siano nulli. Una tale scelta implica che il parametro λ, che descrive la curva γ,
sia proporzionale, a meno di una costante, al tempo proprio τ
λ ∝ τ + costante .
(1.6.18)
Una tale parametrizzazione, per la curva γ, è chiamata parametrizzazione affine.
14
Capitolo 1. Richiami di Relatività Generale
Il vantaggio di considerare l’azione della particella nella forma (1.6.15) è che
possiamo prendere il limite m → 0 per particelle di massa nulla. In questo caso
si trova che ds2 = 0, mentre la (1.6.17) resta invariata.
Consideriamo ora la trasformazione
x µ → x µ + αkµ ( x ), e → e .
(1.6.19)
Allora, al primo ordine in α,
S→S+
α
2
Z λ
b
λa
dλe−1 Lk gµν ẋ µ ẋ ν ,
(1.6.20)
dove
η
η
Lk gµν = kη gµν,η + k ,µ gην + k ,ν gηµ .
(1.6.21)
L’azione risulta, quindi, invariante, al primo ordine in α, se Lk gµν = 0. Un
campo vettoriale k con queste proprietà è detto campo vettoriale di Killing o,
semplicemente, vettore di Killing.
In particolare, k, è associato ad una simmetria dell’azione della particella e,
quindi, ad una carica conservata. Non è difficile verificare che questa carica è
Q = k · p = k µ pµ ,
(1.6.22)
dove pµ è il quadrimpulso della particella
pµ = m
dx µ
dτ
(1.6.23)
Per ogni campo vettoriale k, è sempre possibile scegliere un sistema di
coordinate per cui
∂
k=
,
(1.6.24)
∂ζ
dove ζ è una delle coordinate. In tali coordinate
Lk gµν =
∂gµν
∂ζ
.
(1.6.25)
Dall’ultima relazione si vede che k è un vettore di Killing se la metrica è
indipendente da ζ. Ad esempio, per la metrica di Schwarzschild (vedi più
∂gµν
avanti), ∂t = 0. Per cui un possibile vettore di Killing è k =
conservata associata è l’energia della particella.
15
∂
∂t
e la quantità
Capitolo 2
Equazioni di campo di Einstein
Nel capitolo precedente abbiamo visto come sia la connessione che il tensore
di Riemann possano essere definiti in funzione della metrica dello spaziotempo.
Inoltre, anche l’equazione del moto in relatività tiene conto della connessione e
quindi della metrica. Sembra quindi che la vera variabile dinamica da determinare sia la metrica stessa. Ci proponiamo, in questo capitolo, di determinare
quali siano le equazioni che permettono di ricavarne la forma esplicita. Tali
equazioni sono proprio le equazioni di campo di Einstein.
2.1
Il campo gravitazionale
Prima di procedere con il cercare equazioni che permettano di determinare
la metrica dello spaziotempo, identifichiamo il campo gravitazionale. Partiamo dall’equazione delle geodetiche (1.6.13) e scegliamo, come parametro che
descrive la curva, il cammino proprio s, definito in (1.5.5)
ν
ρ
d2 x µ
µ dx dx
+
Γ
= 0,
νρ
ds ds
ds2
(2.1.1)
che, come si è detto, descrive il moto dei corpi in relatività. Il campo gravitazionale non può che essere contenuto nelle Γ, che sono, a loro volta, le derivate
della metrica. Viene naturale quindi identificare il campo gravitazionale con la
metrica gµν : questo costituisce uno degli aspetti peculiari della teoria.
Per rendere la cosa più quantitativa, cominciamo col dire che, in genere, gµν
differisce di poco dalla metrica nello spazio di Minkowski. Poniamo quindi
gµν = ηµν + hµν , con |hµν | 1 .
16
(2.1.2)
Capitolo 2. Equazioni di campo di Einstein
Il campo gravitazionale, in genere, è un campo quasi statico; si ha quindi
∂hµν
∂x0
' 0.
(2.1.3)
Nel caso di basse velocità, rispetto a quella della luce nel vuoto, le componenti
dxi
dx0
ds (i = 1, 2, 3) risultano trascurabili rispetto a ds . Fatte queste ipotesi la (2.1.1)
diventa
d2 x i
= −Γi 00 .
(2.1.4)
ds2
Sotto le ipotesi fatte, il simbolo di Christoffel può essere scritto come
1 ∂h00
.
2 ∂xi
(2.1.5)
1 ∂h00
d2 x i
=
.
2 ∂xi
ds2
(2.1.6)
Γi 00 ' −
Combinando la (2.1.4) e (2.1.5) si ha che
D’altra parte, in virtù del Principio di Corrispondenza, sappiamo che l’equazione del moto è ben approssimata da quella di Newton
∂Φ
d2 x i
=−
.
2
∂xi
dt
(2.1.7)
Nel limite non relativistico, inoltre, possiamo porre ds ' −dt e, confrontando la
(2.1.6) e la (2.1.7), si trova
h00 = −2Φ ,
(2.1.8)
e quindi
g00 ' −1 − 2Φ .
(2.1.9)
Sostituendo l’espressione del potenziale Newtoniano generato da una distribuzione di massa M con simmetria sferica, Φ = − M
r , si ha che
g00 = −1 +
Nel SI si avrebbe: g00 = −1 +
2GM
,
c2 r
2M
,
r
(2.1.10)
dove G è la costante di gravitazione universale.
17
Capitolo 2. Equazioni di campo di Einstein
2.2
Tensore energia impulso
Dobbiamo, a questo punto tenere a mente un importante fatto: il campo
gravitazionale non è generato solo da materia, ma anche da qualunque distribuzione di energia e impulso. Ad esempio il campo elettromagnetico trasporta
energia e impulso e, quindi, incurva lo spaziotempo: esso stesso è sorgente di
gravità. È necessario tenere conto di questo fatto nelle equazioni di campo che
andremo a ricavare. A questo scopo introduciamo il tensore energia impulso Tµν .
Consideriamo un sistema fisico il cui integrale d’azione ha la forma1
Sm =
Z
d4 x
p
−g Λ ,
(2.2.1)
dove Λ è la densità di lagrangiana del sistema. Il principio variazionale di Hamilton stabilisce che il “moto” di un sistema fisico, fra due istanti dello spazio
delle configurazioni, è tale che l’azione sia stazionaria in corrispondenza della
“traiettoria del moto” per piccole perturbazioni dello stesso. Tuttavia noi non
siamo interessati alle “equazioni del moto” del sistema fisico. È sufficiente
quindi scrivere soltanto i termini legati alle variazioni delle gµν . Riportiamo
solamente il risultato finale tralasciando i calcoli2 :
1
δSm = −
2
Z
d4 x
p
− g Tµν δgµν ,
(2.2.2)
dove Tµν è il tensore energia impulso dato da
Tµν
√
√
∂ −g Λ
∂ −g Λ
2
= −√
− ∂λ
.
−g
∂gµν
∂gµν ,λ
(2.2.3)
Risulta chiaro, dunque, che il tensore energia impulso è simmetrico. Il tensore
energia impulso gode di un’altra importante proprietà, e cioè che
T µν ;ν = 0 .
(2.2.4)
In presenza di un campo elettromagnetico si ha che Λ è data da
Λ=−
1
F F gµρ gνσ ,
16π µν ρσ
(2.2.5)
√
d4 x − g indichiamo l’elemento di volume invariante.
2 Una derivazione dei risultati che seguono può essere trovata in Landau & Lifschitz, Teoria
dei campi, Editori Riuniti university press.
1 Con
18
Capitolo 2. Equazioni di campo di Einstein
dove Fµν è il tensore del campo elettromagnetico. L’espressione (2.2.3) del
tensore energia impulso ci permette di calcolare il tensore energia impulso del
campo elettromagnetico. Dopo semplici passaggi si trova
Tµν =
2.3
1
1 Fµρ Fν ρ − Fρσ F ρσ gµν .
4π
4
(2.2.6)
Equazioni di Einstein
Prima di passare alla deduzione delle equazioni del campo gravitazionale
definiamo l’azione del campo gravitazionale. Questa, detta anche azione di
Hilbert-Einstein, è data dalla formula
1
Sg =
16π
Z
d4 x
p
−g R ,
(2.3.1)
dove R è la curvatura scalare di Ricci, ottenuta contraendo la metrica con il tensore
di Ricci (1.4.15)
R ≡ gµν Rµν .
(2.3.2)
Possiamo passare ora alla deduzione delle equazioni del campo gravitazionale.
Queste equazioni si ricavano dal principio di minima azione δ Sg + Sm = 0.
Facendo variare Sg rispetto alle gµν si trova, dopo alcuni passaggi, che
1
δSg =
16π
Z
d4 x
p
1
− g Rµν − gµν R δgµν ,
2
(2.3.3)
mentre la variazione di Sm è data dalla (2.2.2). Dal principio di minima azione
si ha quindi
1
16π
Z
d4 x
p
1
− g Rµν − gµν R − 8πTµν δgµν = 0
2
(2.3.4)
e quindi, tenendo conto che le δgµν sono arbitrarie,
1
Rµν − gµν R = 8πTµν .
2
(2.3.5)
Queste sono le equazioni del campo gravitazionale, equazioni fondamentali
della teoria della relatività generale. Sono anche dette equazioni di campo di
19
Capitolo 2. Equazioni di campo di Einstein
Einstein. Il tensore Gµν definito da
1
Gµν = Rµν − gµν R
2
(2.3.6)
è detto tensore di Einstein.
Contraendo le equazioni (2.3.5) con la metrica si trova
R = −8πT ,
(2.3.7)
dove T = gµν Tµν è la traccia del tensore T. Ne esce che le equazioni di campo
possono essere scritte anche nella forma
1
Rµν = 8π Tµν − gµν T .
2
(2.3.8)
Le equazioni di Einstein non sono lineari e quindi il principio di sovrapposizione
non vale per i campi gravitazionali. In generale le equazioni possono essere
linearizzate solo per campi deboli (vedi all’inizio di questo capitolo).
Nel vuoto si ha che Tµν = 0, per cui le equazioni si riducono a
Rµν = 0 .
(2.3.9)
Ciò non significa che lo spaziotempo sia piatto. Per affermare una cosa del
genere abbiamo bisogno di una condizione più forte e cioè che Rµνρσ = 0.
La proprietà cruciale che caratterizza il tensore di Einstein è l’identità
G µν ;ν = 0 .
(2.3.10)
Essa segue direttamente dall’identità di Bianchi (1.4.14). Di conseguenza, in
base alle equazioni di campo (2.3.5), anche il tensore energia impulso deve
soddisfare un’identità simile. Si ritrova così l’equazione (2.2.4). L’equazione
(2.2.4) esprime la conservazione dell’energia e dell’impulso e contiene in sé le
equazioni del moto del sistema fisico. Quindi le equazioni del campo gravitazionale contengono implicitamente le equazioni della materia stessa che genera
questo campo. Da ciò risulta che la distribuzione e il moto della materia stessa
che genera il campo devono essere determinati contemporaneamente al campo
medesimo.
20
Capitolo 3
Buco Nero di Schwarzschild
In questo capitolo deriveremo una delle soluzioni esatte delle equazioni di
Einstein: la soluzione di Schwarzschild. La soluzione di Schwarzschild nel vuoto
descrive lo spaziotempo attorno ad una massa sferica, non rotante, e priva
di carica elettrica. Storicamente è la prima ad essere stata trovata. Con essa
è stato possibile calcolare l’angolo di precessione dell’orbita di Mercurio e la
deflessione della luce in prossimità del Sole: questi furono i fatti che diedero
forte sostegno alla teoria di Einstein. Inoltre, come vedremo approfonditamente
in seguito, essa è in grado di prevedere l’esistenza dei buchi neri.
3.1
Soluzione di Schwarzschild
Consideriamo un campo gravitazionale a simmetria sferica. Un campo del
genere può essere generato da qualsiasi distribuzione a simmetria centrale della
massa; in particolare è necessario che non solo la distribuzione della materia sia
a simmetria a centrale, ma anche il moto della materia: la velocità in ogni punto
deve essere radiale. Se scegliamo un sistema di coordinate “sferiche” (r, θ, φ) la
forma più generale dell’intervallo è
ds2 = h(r, t)dr2 + k(r, t) sin2 θdφ2 + dθ 2 + l (r, t)dt2 + a(r, t)dr dt ,
(3.1.1)
dove a, h, k, l sono funzioni del “raggio vettore” r e del “tempo” t.
Eseguiamo a questo punto una trasformazione di coordinate che non alteri
la simmetria sferica di ds2 , trasformiamo cioè le coordinate r e t attraverso le
formule
r = f 1 (r 0 , t 0 ), t = f 2 (r 0 , t 0 )
(3.1.2)
21
Capitolo 3. Buco Nero di Schwarzschild
( f 1 e f 2 sono funzioni delle nuove coordinate r 0 e t0 ), in modo che a(r, t) si
annulli e che k (r, t) sia uguale a r2 . Una tale scelta per la coordinata r implica
che la lunghezza di una circonferenza centrata nell’origine delle coordinate sia
2πr. Riscriviamo le grandezze h e l in forma esponenziale, rispettivamente come
eλ e −eν , dove λ e ν sono funzioni di r e t. Si ottiene quindi per ds2 l’espressione
ds2 = −eν dt2 + eλ dr2 + r2 dθ 2 + sin2 θ dφ2 .
(3.1.3)
Se, quindi, le coordinate x µ sono rappresentate dalle coordinate (t, r, θ, φ) le
componenti non nulle della metrica sono
gtt = −eν ,
gθθ = r2 ,
grr = eλ ,
gφφ = r2 sin2 θ .
(3.1.4)
gφφ = r −2 sin−2 θ .
(3.1.5)
Inoltre le componenti della metrica inversa sono
gtt = −e−ν ,
grr = e−λ ,
gθθ = r −2 ,
Con l’aiuto della formula (1.5.9) possiamo calcolarci le Γ. Si ottiene (l’apice
indica la derivazione rispetto ad r e il punto la derivazione rispetto a t).
Γr rr =
λ0
2
Γt rr = λ̇2 eλ−ν ,
Γr rt =
Γt rt =
,
λ
2,
ν0
2
Γθ φφ = − sin θcosθ ,
,
Γr θθ = −re−λ ,
Γr tt =
ν0 ν−λ
,
2e
(3.1.6)
Γr φφ = −r sin2 θe−λ .
Tutte le altre componenti delle Γ (tranne quelle che si ottengono dalla simmetria
della connessione, ovvero permutando gli indici bassi) sono nulle.
Per scrivere (e risolvere) le equazioni di Einstein dovremmo ora calcolare le
componenti del tensore di Ricci. Grazie alle formule (1.4.15) e (1.4.11) otteniamo,
per le componenti miste e dopo un po’ di calcoli
r
8πT r = −e
8πT
θ
−λ
ν0
1
+ 2
r
r
+
1
,
r2
1 −λ 00 ν02 ν0 − λ0 ν0 λ0
= 8πT φ = − e
ν +
+
−
2
2
r
2
2
1
λ̇
λ̇ν̇
+ e−ν λ̈ +
−
,
2
2
2
(3.1.7)
φ
θ
22
(3.1.8)
Capitolo 3. Buco Nero di Schwarzschild
t
8πT t = −e
−λ
1
λ0
−
r
r2
+
1
,
r2
(3.1.9)
λ̇
8πT r t = −e−λ .
(3.1.10)
r
(le altre equazioni nelle equazioni di Einstein si annullano identicamente).
Cerchiamo ora la soluzione per il campo al di fuori delle masse che lo generano,
poniamo cioè il tensore energia impulso uguale a zero. Si ottengono quindi le
equazioni
0
1
1
−λ ν
−e
+ 2 + 2 = 0,
(3.1.11)
r
r
r
1
λ0
−λ 1
+
−e
−
= 0,
(3.1.12)
r
r2
r2
λ̇ = 0 .
(3.1.13)
Omettiamo l’equazione (3.1.8) perché non è indipendente dalle altre tre.
Dalla (3.1.13) si vede che λ non dipende dal tempo. Sommando (3.1.11) e
(3.1.12), troviamo λ0 + ν0 = 0, cioè
λ + ν = f (t) ,
(3.1.14)
dove f (t) è una funzione solo di t. Senza perdita di generalità si può porre
f (t) = 0: ciò non altera la forma dell’intervallo (3.1.3). Da ciò si vede che un
campo gravitazionale a simmetria centrale nel vuoto è automaticamente statico.
L’equazione (3.1.12) si integra facilmente e dà
e−λ = eν = 1 +
costante
.
r
(3.1.15)
All’infinito (r → ∞) si ha e−λ = eν = 1, cioè la metrica diventa minkowskiana
lontano dal corpo che genera il campo. La costante si esprime facilmente in
funzione della massa che genera il campo sfruttando il limite di campo debole
(2.1.10). In particolare si trova che costante = 2M e l’intervallo assume la forma
−1
2M
2M
2
dr2 + r2 sin2 θdφ2 + dθ 2 ,
ds = − 1 −
dt + 1 −
r
r
2
(3.1.16)
r = 2M è detto raggio di Schwarzschild ed è caratteristico di ogni corpo.
Questa è la soluzione trovata da Karl Schwarzschild nel 1916, pochi mesi
dopo la pubblicazione della teoria della relatività generale.
23
Capitolo 3. Buco Nero di Schwarzschild
3.2
Collasso gravitazionale di un corpo sferico
Nella metrica di Schwarzschild (3.1.16), gtt si annulla e grr diverge per r =
2M (raggio si Schwarzschild). Potremmo essere portati a pensare che la metrica
ha una singolarità per r = 2M e che quindi non possano esistere corpi con
raggio inferiore al proprio raggio di Schwarzschild. Tuttavia queste conclusione
sarebbero errate.
Per precisare il carattere della metrica spaziotemporale vicino a r = 2M,
studiamo il problema del collasso di un corpo sferico (una stella ad esempio)
e vediamo cosa succede per r → 2M. Per fare ciò ci riconduciamo al problema
di una particella di “prova” che cade liberamente (trascurando le forze di
pressione) nel campo della massa M. La metrica al di fuori della stella è la
metrica di Schwarzschild (3.1.16) e, per continuità, anche sulla superficie. Se
r = r (t) sulla superficie abbiamo
2
ds = −
2M
1−
r
2M
− 1−
r
−1 ṙ2 dt2 + r2 dΩ2 ,
(3.2.1)
2
2
2
2
dove ṙ = dr
dt e dΩ = sin θdφ + dθ (metrica 2-sfera di raggio unitario). Per un
moto puramente radiale dΩ2 = 0; inoltre ds2 = −dτ 2 . Si ha quindi
1=
2M
1−
r
2M
− 1−
r
−1 2
dt
ṙ2
.
dτ
(3.2.2)
Notiamo ora che ∂t∂ è un vettore di Killing per la metrica di Schwarzschild e la
carica conservata corrispondente è l’energia della particella (vedi (1.6.22)) data
da
dt
(energia per unità di massa)
(3.2.3)
e = − gtt
dτ
per cui possiamo riscrivere la (3.2.2) come
1=
o
2M
1−
r
2M
− 1−
r
−1 −2
2M
2
ṙ
1−
e2
r
2 1
2M
2M
2
ṙ = 2 1 −
−1+e .
r
r
e
2
(3.2.4)
(3.2.5)
Immaginiamo che il collasso avvenga con velocità radiale iniziale nulla; quindi
ṙ = 0 per r = rmax . Allora r decresce avvicinandosi a r = 2M asintoticamente per
t → ∞. Infatti integrando la (3.2.5) si ottiene che il tempo del collasso (per un
24
Capitolo 3. Buco Nero di Schwarzschild
osservatore lontano) è dato da
t=
Z rmax
r
1−
2M
r
edr
q
2M
r
.
(3.2.6)
− 1 + e2
rmax = 12M
. Questo integrale diverge per r → 2M come −2M ln(r − 2M) e
− e2
quindi la legge asintotica con cui r tende a 2M è
t
r − 2M = costante e− 2M .
(3.2.7)
Si vede così che lo stadio finale di avvicinamento di un corpo in collasso al
raggio di Schwarzschild avviene secondo una legge esponenziale con un tempo
caratteristico molto piccolo ∼ 2M (nel SI 2GM
).
c3
D’altra parte dal punto di vista di un osservatore sulla superficie della stella,
l’avvicinamento avviene in un intervallo di tempo (proprio) finito. Infatti
d
=
dt
dt
dτ
−1
d
1
2M d
= 2 1−
.
dτ
r
dτ
e
(3.2.8)
Possiamo riscrivere, quindi, la (3.2.5) come
dr
dτ
2
=
2M
2
−1+e .
r
(3.2.9)
Una semplice quadratura permette di vedere che il tempo proprio del collasso
è dato da
Z rmax
dr
q
τ=
.
(3.2.10)
2M
2M
r
−
r
rmax
Questo integrale converge per r → 2M. Raggiunto in tempo proprio il raggio di
Schwarzschild il corpo corpo continuerà a comprimersi e tutte le sue particelle
raggiungeranno il centro in un intervallo di tempo (proprio) finito. Infatti,
integrando la (3.2.10) per r → 0, si ottiene che l’intervallo di caduta è dato da
τ=
πM
3
(1 − e ) 2
.
(3.2.11)
Non accade, quindi, nulla di speciale in r = 2M. Ciò suggerisce di studiare
la natura dello spaziotempo vicino ad r = 2M in un sistema di coordinate in
“caduta” con il corpo. È, inoltre, conveniente scegliere particelle senza massa.
25
Capitolo 3. Buco Nero di Schwarzschild
Per geodetiche radiali nulle nello spaziotempo di Schwarzschild si ha che
dt2 = dove
dr2
1−
2M
r
∗ 2
2 ≡ (dr ) ,
r − 2M
r = r + 2M ln
, per r > 2M
2M
(3.2.12)
∗
(3.2.13)
è la coordinata radiale di Regge-Wheeler. Per r che varia tra 2M e ∞ si ha che r ∗
varia da −∞ e ∞. Dalla (3.2.12) si ha che
d(t ± r ∗ ) = 0 ,
(3.2.14)
per geodetiche radiali nulle. Si può introdurre quindi la coordinata entrante nulla
di Eddington-Finkelstein definita da
v = t + r∗ , −∞ < v < ∞ .
(3.2.15)
Possiamo riscrivere, a questo punto, la metrica nelle coordinate entranti di
Eddington-Finkelstein (v, r, θ, φ)
ds
2
2M
− dt2 + dr ∗2 + r2 dΩ2
=
1−
r
2M
dv2 + 2drdv + r2 dΩ2 .
= − 1−
r
(3.2.16)
Si noti che v è inizialmente definita solo per r > 2M, ma può essere continuata
analiticamente per tutti i valori di r. Inoltre, a causa del termine misto, è immediato verificare come la metrica sia regolare per r = 2M, per cui la singolarità
di Schwarzschild è effettivamente di tipo coordinato.
Oltre a dimostrare la non singolarità fisica del raggio di Schwarszchild, la
metrica di Eddington-Finkelstein è molto adatta per capire come mai niente
possa allontanarsi dal campo gravitazionale della sorgente una volta passata la
sfera si Schwarzschild. È possibile, infatti, riscrivere la metrica in questo modo
2
2drdv = − − ds +
2M
2
2
2
− 1 dv + r dΩ .
r
(3.2.17)
In particolare si vede che 2drdv ≤ 0 quando ds2 ≤ 0, cioè per particelle che si
26
Capitolo 3. Buco Nero di Schwarzschild
muovono su geodetiche di tipo tempo o luce, e per r ≤ 2M, cioè dentro alla
sfera si Schwarzschild. Inoltre, il segno di dv non può essere arbitrario, poiché
se consideriamo il moto dal passato verso il futuro si ha dv > 0, dato che v era
stata definita come v = t + r ∗ , per cui se il tempo t aumenta anche il “tempo” v
deve aumentare. Da quanto detto si evince che deve essere necessariamente
dr ≤ 0 per r ≤ 2M .
(3.2.18)
Il segno d’uguaglianza vale solamente quando r = 2M, dΩ = 0 e ds2 = 0 (geodetiche radiali entranti nulle). Quindi niente può allontanarsi dal campo gravitazionale della sorgente una volta oltrepassata la sfera si Schwarzschild. Una
tale superficie è detta orizzonte degli eventi.
3.3
Buchi neri e buchi bianchi
Abbiamo visto come nessun segnale possa scappare dalla superficie di una
stella una volta che questa abbia passato (durante il collasso) la regione r = 2M.
La stella è collassata in un buco nero. Abbiamo anche visto che per un osservatore
esterno, la superficie delle stella non raggiunge mai effettivamente la sfera di
Schwarzschild, ma per r → 2M il redshift della luce che lascia la superficie
cresce esponenzialmente e la stella scompare dalla vista in un tempo ∼ MG
.
c3
L’ipersuperficie r = 2M agisce come una membrana unidirezionale: tutto
può entrare, ma niente può uscire. Vediamo ora che succede se al posto di v
introduciamo la coordinata uscente nulla di Eddington-Finkelstein u, definita come
u = t − r∗ , −∞ < u < ∞
(3.3.1)
anch’essa definita inizialmente fuori dalla sfera di Schwarzschild, ma prolungabile analiticamente all’interno. Possiamo, quindi, riscrivere la metrica nelle
coordinate di Eddington-Finkelstein uscenti (u, r, θ, φ)
2M
ds = − 1 −
du2 − 2drdu + r2 dΩ2 .
r
2
(3.3.2)
È importante sottolineare che la regione r < 2M nelle coordinate di EddingtonFinkelstein uscenti non è la stessa delle coordinate di Eddington-Finkelstein
entranti. Infatti nella regione all’interno della sfera di Schwarzschild la metrica
descrive un comportamento esattamente opposto a quello visto prima. Per
27
Capitolo 3. Buco Nero di Schwarzschild
vedere ciò riscriviamo la metrica (3.3.2) nel seguente modo
2
2drdu = −ds +
2M
− 1 du2 + r2 dΩ2 .
r
(3.3.3)
Nella regione r ≤ 2M risulta
drdu ≥ 0 , per ds2 ≤ 0 .
(3.3.4)
Dato che deve essere du ≥ 0 per linee d’universo dirette verso il “futuro”, deve
anche essere dr ≥ 0. Il segno d’uguaglianza vale solo nel caso in cui r = 2M,
dΩ = 0 e ds2 = 0. In questo caso una stella con una superficie di raggio r < 2M
deve per forza espandersi attraverso la regione r = 2M. A questa soluzione
soluzione viene dato il nome di buco bianco, l’inverso temporale del buco nero.
Entrambe le soluzioni di buco nero e buco bianco sono previste dalla relatività
generale essendo le equazioni di Einstein invarianti rispetto alla riflessione
temporale. Tuttavia i buchi bianchi richiedono condizioni iniziali estremamente
improbabili, per questo si è portati a pensare che solo la soluzione di buco nero
sia realizzabile.
3.4
Coordinate di Kruskal-Szekeres
La regione r > 2M è coperta sia dalle coordinate entranti che uscenti di
Eddington-Finkelstein. Possiamo quindi riscrivere la metrica di Schwarzschild
in termini delle coordinate (u, v, θ, φ)
2M
ds = − 1 −
dudv + r2 dΩ2 .
r
2
(3.4.1)
Introduciamo ora nuove coordinate (U, V ) definite (per r > 2M) da
u
v
U = −e− 4M , V = e 4M
(3.4.2)
in termini delle quali la metrica diventa
ds2 = −
32M3 − r
e 2M dUdV + r2 dΩ2 ,
r
28
(3.4.3)
Capitolo 3. Buco Nero di Schwarzschild
r∗
dove r (U, V ) è data implicitamente da UV = e 2M o anche
r
r − 2M
UV = −
e 2M .
2M
(3.4.4)
La metrica (3.4.3) è quindi la metrica di Schwarzschild riscritta nelle coordinate
Kruskal-Szekeres (U, V, θ, φ). Inizialmente la metrica è definita per U < 0 e V > 0,
ma può essere estesa analiticamente in modo che risulti U > 0 e V < 0. Dalla
(3.4.4) si vede che r = 2M corrisponde a UV = 0, cioè lungo gli assi U e V. La
singolarità in r = 0 (che è una vera singolarità dello spaziotempo) si ha quando
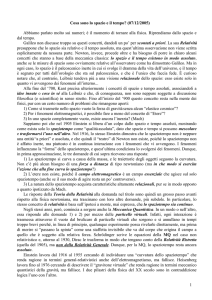
UV = 1, per cui essa non sarà un punto, ma due archi di iperbole.
È conveniente disegnare le linee con U e V costanti (geodetiche radiali nulle
entranti o uscenti) a 45 gradi, in modo che il diagramma spaziotempo sia
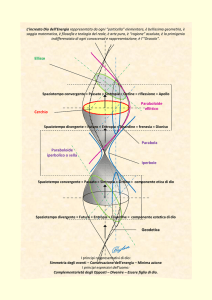
Ci sono in tutto quattro regioni nello spaziotempo di Kruskal, dipendenti
dal segno di U e V. Le regioni I e II sono anche ricoperte dalle coordinate di
Eddington-Finkelstein entranti. Queste sono le uniche regioni rilevanti per il
collasso gravitazionale; infatti le regioni III e IV corrispondono alle soluzioni di
buco bianco.
29
Capitolo 3. Buco Nero di Schwarzschild
3.5
Singolarità e completezza geodetica
Una singolarità della metrica è un punto in cui il determinante o il suo
inverso si annullano. D’altra parte una singolarità può essere dovuta ad una
cattiva scelta del sistema di coordinate: abbiamo visto, infatti, che la singolarità nell’orizzonte degli eventi nella metrica di Schwarzschild è proprio di
questo tipo. Questo tipo di singolarità è quindi rimovibili, come dimostrato
ad esempio introducendo le coordinate di Eddington-Finkelstein o quelle di
Kruskal-Szekeres.
In generale se non esiste un sistema di coordinate per cui la singolarità sia
rimovibile allora questa costituisce una vera singolarità dello spaziotempo. Ogni
singolarità per cui qualche scalare di curvatura, costruito a partire dal tensore
metrico, diverge è una singolarità dello spaziotempo. Una tale singolarità è
chiamata anche singolarità di curvatura. La singolarità in r = 0 nello spaziotempo
di Schwarzschild ne è un esempio. Tuttavia non tutte le singolarità irrimovibili
sono singolarità di curvatura.
Potremmo pensare, quindi, di “tagliare” la regione di spaziotempo contenente la singolarità non rimovibile e non doverci più preoccupare di questa.
Tuttavia rimarrebbe il problema equivalente di capire cosa fare con delle curve
che raggiungono la frontiera della regione tagliata. Notiamo dapprima che
il problema non sussiste se la regione si trova ad infinito, cioè ad un valore
infinito del parametro affine della curva che raggiunge una tale regione. D’altra
parte l’impossibilità di continuare tutte le curve per tutti i valori del relativo
parametro affine può essere presa come il carattere che definisce uno spaziotempo
singolare. Parleremo, infatti, di un spaziotempo singolare come di uno spazio
geodeticamente incompleto.
Possiamo quindi dare la seguente
Definizione 3.5.1. Uno spaziotempo è non singolare se e solo se tutte le geodetiche
possono essere estese per tutti i valori del proprio parametro affine, cambiando coordinate
se necessario.
Nel caso della soluzione di Schwarzschild nel vuoto, una particella che si
muove su una geodetica radiale entrante raggiungerà la singolarità coordinata
r = 2M per un valore finito del parametro affine, ma, come abbiamo visto, questa
geodetica può essere continuata nella regione II con un opportuno cambio di
coordinate. La sua continuazione incontra, quindi, la singolarità di curvatura
in r = 0. Tagliare una qualsiasi regione contenente r = 0, pertanto, conduce a
un’incompletezza della geodetica.
30
Capitolo 3. Buco Nero di Schwarzschild
3.6
Massima estensione analitica
Ogni volta che incontriamo una singolarità, per un valore finito del parametro affine lungo una qualche geodetica, dovremmo cercare di capire se questa è
rimovibile o meno. In caso affermativo, e con un opportuno cambio di coordinate, possiamo costruire la massima estensione analitica di un dato spaziotempo
in cui ogni geodetica che non termina su una singolarità irremovibile può essere estesa
ad ogni valore del suo parametro affine. Lo spaziotempo di Kruskal rappresenta,
quindi, la massima estensione analitica dello spaziotempo di Schwarzschild:
non è infatti possibile trovare altre regioni per continuazione analitica.
3.7
Ipersuperfici nulle
Sia S( x ) una funzione liscia delle coordinate x µ dello spaziotempo. Consideriamo una famiglia di ipersuperfici S = costante. I campi vettoriali normali alle
ipersuperfici sono dati dalla formula
l = fe( x ) gµν ∂ν S ∂µ ,
(3.7.1)
dove fe è un’arbitraria funzione non nulla. Se l 2 = 0 per una particolare ipersuperficie, N , allora N è detta essere una ipersuperficie nulla.
Esempio. Facciamo un esempio di ipersuperficie nulla nello spaziotempo di
Schwarzschild in coordinate di Eddington-Finkelstein (v, r, θ, φ). Consideriamo,
a tal proposito, la famiglia di ipersuperfici S = r − 2M. Il vettore normale è dato
da
2M ∂S ∂
∂S ∂
∂S ∂
e
l = f (r ) 1 −
+
+
r
∂r ∂r
∂r ∂v ∂v ∂r
∂
∂
2M
,
(3.7.2)
= fe(r ) 1 −
+
r
∂r ∂v
mentre
l 2 = fe2 gµν ∂µ S∂ν S
2M
2
rr
= fe g = 1 −
fe2 .
r
(3.7.3)
Dall’ultima relazione si vede, in particolare, che r = 2M è un’ipersuperficie
31
Capitolo 3. Buco Nero di Schwarzschild
nulla e che
l
∂
= fe .
∂v
r =2M
(3.7.4)
Consideriamo ora alcune proprietà delle ipersuperfici nulle. Sia N un’ipersuperficie nulla con vettore normale l. Un vettore t, tangente a N , è un vettore
per cui t · l = 0; ma, siccome N è nulla, l · l = 0 e quindi l è esso stesso tangente
ad N . Con ciò
dx µ
(3.7.5)
lµ =
dλ
per qualche curva di tipo nullo su N .
Proposizione 3.7.1. Le curve x µ (λ) sono geodetiche.
Dimostrazione. Consideriamo
ν
µ
ρ
e
l ∇ν l = l ∂ρ f gµν ∂ν S + fegµν l ρ ∇ρ ∂ν S
d ln fe µ e ρ µ e−1
l + f l ∇ f lρ
=
dλ
d ln fe µ 1 µν 2
µν
=
l + g ∂ν l − g ∂ν ln fe l 2 .
(3.7.6)
dλ
2
2
µ
2
Nonostante l = 0 non necessariamente deve essere che ∂ l = 0, a meno
N
N
che l’intera famiglia S = costante non sia nulla. Dobbiamo però considerare che,
siccome l 2 è costante su N , allora tµ ∂µ l 2 = 0 per ogni vettore t tangente ad N .
In questo modo
µ
µ
2
(3.7.7)
∂ l ∝l
N
e, pertanto,
lν∇
ν
lµ
N
∝ lµ ,
(3.7.8)
cioè x µ (λ) è una geodetica con vettore tangente l. La funzione fe può essere
scelta in modo che l ν ∇ν l µ = 0, ovvero in modo che λ sia un parametro affine
Definizione 3.7.1. le geodetiche nulle x µ (λ) con parametro affine λ, per cui i
µ
vettori tangenti dx
dλ sono normali all’ipersuperficie N , sono le generatrici di N .
Esempio. U = 0 è un’ipersuperficie nulla nello spaziotempo di Kruskal. I
32
Capitolo 3. Buco Nero di Schwarzschild
vettori normali alle ipersuperfici U = costante sono
l=−
l
N
=−
r
fer
∂
2M
e
∂V
32M3
fee ∂
, siccome r = 2M su N
16M2 ∂V
(3.7.9)
(3.7.10)
È facile vedere che l 2 ≡ 0, per cui sia l 2 che ∂µ l 2 si annullano su N ; ciò è
dovuto al fatto che le ipersuperfici U = costante sono nulle per ogni valore
della costante, non solo zero. In particolare si ha che l ν ∇µ l µ = 0 se fe è costante.
Scegliamo, quindi, fe = −16M2 e−1 . Si ha allora che
l=
∂
∂V
(3.7.11)
è normale ad U = 0 e V è un parametro affine per le generatrici di questa ipersuperficie
nulla.
3.8
Orizzonti di Killing
Definizione 3.8.1. Un’ipersuperficie nulla N è un orizzonte di Killing del campo
vettoriale di Killing ξ se, su N , ξ è normale a N .
Sia l il vettore normale ad N definito in modo che l ν ∇ν l µ = 0 (parametrizzazione affine). Allora, siccome su N
ξ = fl
(3.8.1)
per una qualche funzione f , è facile verificare che
ξ ν ∇ν ξ µ = κξ µ ,
(3.8.2)
dove κ = ξ µ ∂µ ln | f | è chiamata gravità superficiale. Un’altra relazione utile per il
calcolo di κ su N è
1
κ 2 = − ∇µ ξ ν ∇µ ξ ν .
(3.8.3)
2
Per un campo vettoriale di Killing ξ non è difficile verificare la seguente
relazione
∇ρ ∇µ ξ ν = Rν µρσ ξ σ .
(3.8.4)
33
Capitolo 3. Buco Nero di Schwarzschild
Sfruttando, infine, questa relazione possiamo dimostrare la seguente
Proposizione 3.8.1. κ è costante sulle orbite di ξ.
Dimostrazione. Sia t un vettore tangente a N . Allora dalla (3.8.3) si ha che
tν ∂ν κ 2 = − ∇µ ξ ν tρ ∇ρ ∇µ ξ ν
= − ∇µ ξ ν tρ Rνµρ σ ξ σ
(3.8.5)
Ora, dato che il vettore di Killing ξ oltre ad essere normale ad N è anche
tangente, possiamo scegliere il vettore t = ξ. Così facendo si trova che
ξ ν ∂ν κ 2 = − ∇µ ξ ν Rνµρσ ξ ρ ξ σ = 0
(3.8.6)
L’ultima uguaglianza nella (3.8.6) segue dalle proprietà di simmetria del tensore
di Riemann.
Si trova così che κ è costante su orbite di ξ.
Gravità superficiale sulla sfera di Schwarzschild
Abbiamo visto come la metrica di Schwarzschild possa essere espressa nelle
coordinate di Eddington-Finkelstein entranti. In particolare, questa è data da
2M
dv2 + 2drdv + r2 dΩ2
ds = − 1 −
r
2
(3.8.7)
∂
e ammette vettore di Killing k = ∂v
. Come abbiamo già visto, k, risulta essere
normale all’ipersuperficie nulla r = 2M; questo fa si che la sfera di Schwarzschild
sia effettivamente un orizzonte di Killing. Un calcolo diretto inoltre ci permette
di trovare la gravità superficiale sull’orizzonte
kν ∇ν kµ =
1 µ
k .
4M
Risulta, quindi, che la gravità superficiale per Schwarzschild è κ =
SI).
34
(3.8.8)
1
4M
4
c
( 4GM
nel
Capitolo 3. Buco Nero di Schwarzschild
Normalizzazione della gravità superficiale
Se N è un orizzonte di Killing di ξ con gravità superficiale κ, allora, questo,
è anche orizzonte di Killing di cξ con gravità superficiale c2 κ per ogni costante
c. Quindi la gravità superficiale non è una proprietà solo di N , ma dipende
anche dalla normalizzazione di ξ.
Non esiste una naturale normalizzazione di ξ su N , dato che ξ 2 = 0 su N .
Tuttavia in uno spaziotempo asintoticamente piatto esiste una naturale normalizzazione ad infinito. Ad esempio per il campo vettoriale di Killing generatore
delle traslazioni temporali, k, possiamo scegliere una normalizzazione di questo
in modo che
k2 → −1 , per r → ∞ .
(3.8.9)
Questa condizione, quindi, fissa k e di conseguenza κ, a meno di un segno. Il
segno può essere scelto in modo che k sia “diretto verso il futuro”.
3.9
Spaziotempo di Rindler
Ritorniamo alla soluzione di Schwarzschild (3.1.16)
−1
2M
2M
2
ds = − 1 −
dt + 1 −
dr2 + r2 sin2 θdφ2 + dθ 2 .
r
r
2
Poniamo
r − 2M =
Da ciò abbiamo che
1−
dove κ =
1
4M .
x2
.
4M
(3.9.1)
(3.9.2)
2M
(κx )2
=
.
r
1 + (κx )2
(3.9.3)
Osserviamo, inoltre, che per x ' 0
2M
' (κx )2
r
(3.9.4)
dr2 = (κx )2 dx2 .
(3.9.5)
1−
e, quindi,
Quindi, per r ' 2M, si trova facilmente che
ds2 ' −(κx )2 dt2 + dx2 +
35
1
dΩ2 .
4M
(3.9.6)
Capitolo 3. Buco Nero di Schwarzschild
La somma dei primi due termini del membro di destra della (3.9.6) può essere
considerata come la metrica di uno spazio bidimensionale, che chiameremo
spaziotempo di Rindler bidimensionale, mentre invece l’ultimo termine corrisponde
1
alla metrica di una 2-sfera di raggio 2κ
. Possiamo quindi andare a studiare
lo spaziotempo vicino l’orizzonte di Killing in r = 2M studiando la metrica
bidimensionale dello spaziotempo di Rindler
ds2 = −(κx )2 dt2 + dx2 ,
(3.9.7)
definita inizialmente in x > 0. Questa metrica è singolare per x = 0, ma questa, ovviamente, è semplicemente una singolarità coordinata. Per vederlo
introduciamo un sistema di coordinate del tipo di Kruskal visto sopra.
U 0 = − xe−κt , V 0 = xeκt
(3.9.8)
in termini delle quali la metrica di Rindler diventa
ds2 = −dU 0 dV 0 .
(3.9.9)
U0 = T − X , V0 = T + X .
(3.9.10)
ds2 = −dT 2 + dX 2 .
(3.9.11)
Poniamo ora
Si trova, infine,
Si trova quindi che lo spaziotempo di Rindler non è altro che lo spaziotempo
di Minkowski bidimensionale in coordinate inusuali. Inoltre le coordinate di
Rindler con x > 0 coprono solo la regione U 0 < 0 e V 0 > 0 dello spazio di
Minkowski.
36
Capitolo 3. Buco Nero di Schwarzschild
Non è difficile vedere dalla (3.9.9) che le linee U 0 = 0 e V 0 = 0 sono curve
nulle. Inoltre il campo vettoriale di killing che avevamo trovato per la metrica
di Schwarzschild, ∂t∂ , nelle coordinate U 0 e V 0 diventa
∂
0 ∂
.
(3.9.12)
k=κ V
−U
∂V 0
∂U 0
È facile verificare che k 0 è normale all’ipersuperficie U 0 = 0. Ciò, in
0
U =0
particolare, dimostra che U 0 = 0 è un orizzonte di Killing.
3.10
Accelerazione sull’orizzonte
Proposizione 3.10.1. L’accelerazione propria di una particella in x = a−1 nello
spaziotempo di Rindler è costante ed uguale ad a.
Dimostrazione. Una particella che si muove su un’orbita di tipo tempo X µ (τ ) di
un campo vettoriale di Killing ξ ha quadrivelocità data da
ξµ
uµ =
− ξ2
21 ,
(3.10.1)
dato che u ∝ ξ e u · u = −1. La sua quadriaccelerazione, invece, è data da
Duµ
dτ
ξ ν ∂ν ξ 2 ξ µ
ξ ν ∇ν ξ µ
=
+
2 .
−ξ 2
2 ξ2
aµ =
(3.10.2)
Osserviamo ora che ξ ν ∂ν ξ 2 = 2ξ µ ξ ν ∇µ ξ ν = 0 per un campo vettoriale di Killing.
Da ciò abbiamo che
ξ ν ∇ν ξ µ
aµ =
(3.10.3)
−ξ 2
e l’accelerazione propria è il modulo di aµ , | a|.
Nello spaziotempo di Rindler possiamo porre ξ = k. Troviamo quindi che
aµ ∂µ =
1 ∂
1 ∂
+ 0
0
0
U ∂V
V ∂U 0
37
(3.10.4)
Capitolo 3. Buco Nero di Schwarzschild
e che
| a| ≡
=
gµν aµ aν
12
=
1
−
1 2
U0V0
1
x
(3.10.5)
Quindi per x = a−1 costante abbiamo | a| = a, cioè le orbite di k nello spaziotempo di Rindler sono linee di universo con accelerazione propria costante.
L’accelerazione cresce asintoticamente per x → 0, così che che l’orizzonte di
Killing in x = 0 è chiamato orizzonte d’accelerazione.
Nonostante l’accelerazione propria di una linea d’universo con x = costante
diverge per x → 0, l’accelerazione misurata da un altro osservatore rimane finita.
Siccome
dτ 2 = (κx )2 dt2 ,
(3.10.6)
in x = a−1 costante, l’accelerazione misurata da un osservatore il cui tempo
proprio è t è data da
dτ 1
1
= (κx ) = κ ,
(3.10.7)
dt x
x
che rimane finita per x → 0. Un osservatore che misura un tempo t non è altro
che un osservatore lontano nello spaziotempo di Schwarzschild. Da quanto
appena detto deduciamo che la gravità superficiale, κ, è la forza per unità di massa
che deve esercitare un osservatore a infinito per tenere una particella ferma sull’orizzonte.
Questo giustifica il termine “gravità superficiale” per κ.
3.11
Diagrammi di Carter-Penrose
Un buco nero è una “regione dello spaziotempo da cui nessun segnale può
scappare ad infinito” (Penrose). Questa definizione non è del tutto soddisfacente,
nel senso che “infinito” non fa parte della struttura dello spaziotempo. Tuttuavia
la “definizione” riguarda la struttura causale dello spaziotempo che rimane
invariata dopo compattificazione conforme
ds2 → de
s2 = Λ2 (r, t)ds2 , Λ 6= 0 .
(3.11.1)
Possiamo scegliere Λ in modo che tutti i punti ad infinito nella metrica originale
si trovino ora per un valore finito del parametro affine nella nuova metrica.
38
Capitolo 3. Buco Nero di Schwarzschild
Perché questo avvenga dobbiamo scegliere Λ tale che
Λ(r, t) → 0 per|r| → ∞ e/o |t| → ∞ .
(3.11.2)
In questo caso “infinito” può essere identificato nei punti (r, t) per cui Λ(r, t) = 0.
Questi punti non fanno parte dello spaziotempo originale, ma possono essere
aggiunti ad esso per dare una compattificazione conforme dello spaziotempo.
Esempio 1. Nello spaziotempo di Minkowski abbiamo la seguente espressione per la metrica
ds2 = −dt2 + dr2 + r2 dΩ2 .
(3.11.3)
Poniamo
(
u=t−r
v=t+r
)
→ ds2 = −dudv +
( u − v )2 2
dΩ .
4
Poniamo ora, invece,
(
)
π
π
e
e
u = tanU − 2 < U < 2
e≥U
e , poiché r ≥ 0
con V
e<π
e − π <V
v = tanV
2
2
(3.11.4)
(3.11.5)
In queste coordinate
2
e cos V
e
ds = 2 cos U
−2 h
i
2 e
2
e
e
e
− 4dUdV + sin U − V dΩ .
(3.11.6)
e| →
Per avvicinarci a “infinito” in questa metrica dobbiamo prendere |U
π
e | → . Scegliendo, quindi,
|V
2
e cos V
e
Λ = 2 cos U
π
2
o
(3.11.7)
portiamo questi punti ad un valore finito del parametro affine nella nuova
metrica
2
2
2 e
e
e
e
de
s = Λds = −4dUdV + sin U − V dΩ2 .
(3.11.8)
Possiamo ora aggiungere “questi punti ad infinito”. Tenendo in conto della
e > V,
e questi punti sono
restrizione V
(
e = −π
U
2
e=π
V
2
)
(
⇔
u → −∞
v→∞
)
(
⇔
r→∞
t finito
39
)
infinito spaziale, i0
Capitolo 3. Buco Nero di Schwarzschild
(
e = ±π
U
2
π
e
V=±
)
(
⇔
u → ±∞
e = −π
U
2
|f
V| = π
)
(
⇔
|f
U | 6= − π2
e=π
V
2
t → ±∞
)
u → −∞
(
⇔
)
infinito temporale, i±
r finito
)
⇔
vfinito
2
(
(
⇔
v → ±∞
2
(
)
ufinito
)
v→∞
⇔
r→∞
t → −∞
r + t finito
r→∞
t→∞
r − t finito
I−
I+
Lo spaziotempo di Minkowski è, quindi, incorporato nel nuovo spaziotempo
con metrica de
s2 con frontiera in Λ = 0.
Introduciamo ora due nuove coordinate, τ e χ, definite da
e +U
e, χ=V
e −U
e.
τ=V
(3.11.9)
In tali coordinate riscriviamo la metrica de
s2 come
de
s2 = Λds2 = −dτ 2 + dχ2 + sin2 χdΩ2
Λ = cos τ + cos χ .
(3.11.10)
(3.11.11)
χ è una variabile angolare definita sempre a meno di 2π. Se non ci sono altre
restrizioni sul campo di variabilità di τ e χ, allora la metrica de
s2 è quella
dell’universo statico di Einstein(E.S.U.), con topologia R(tempo) × S3 (spazio).
La 2-sfera con χ costante (χ 6= 0, π) ha raggio | sin χ|. Se rappresentiamo ogni
2-sfera con χ costante come un punto l’E.S.U può essere disegnato come un
cilindro.
40
Capitolo 3. Buco Nero di Schwarzschild
Lo spaziotempo di Minkowski è conforme alla “regione triangolare”
− π < τ < π, 0 ≤ χ < π
(3.11.12)
Appiattiamo il cilindro per avere il diagramma di Carter-Penrose dello spaziotempo di Minkowski, dove ogni punto rappresenta una 2-sfera, eccetto i punti
in r = 0 e i0 , i± .
41
Capitolo 3. Buco Nero di Schwarzschild
3.12
Singolarità nude
La singolarità in r = 0 che si presenta nel collasso a simmetria sferica è
nascosta, cioè nessun segnale da essa può uscire per raggiungere la regione
I + . Questo in generale non è vero, invece, per lo spaziotempo di Kruskal
dal momento che un segnale da r = 0 nella soluzione di buco bianco può
raggiungere la regione I + . In quest’ultimo caso la singolarità è detta essere
nuda.
Un altro esempio di singolarità nuda si ottiene ponendo M < 0 nella
soluzione di Schwarzschild
2| M | 2 2 | M | −1 2
ds2 = − 1 +
dt + 1 +
dr + r2 sin2 θdφ2 + dθ 2 .
r
r
(3.12.1)
Questa particolare soluzione risolve le equazioni di Einstein per cui a priori
non dovremmo escluderla. Il diagramma di Carter-Penrose corrispondente è il
seguente:
42
Capitolo 3. Buco Nero di Schwarzschild
Nessuno di questi esempi risulta rilevante per il collasso gravitazionale.
Potremmo considerare, invece, la formazione di una singolarità nuda in seguito
ad un collasso a simmetria sferica. Il corrispondente diagramma di Carter-Penrose
è
43
Capitolo 3. Buco Nero di Schwarzschild
In realtà neanche questa eventualità può essere presa in considerazione
perché è necessario avere M > 0.
Rimane la possibilità che una singolarità nuda si formi a seguito di un
collasso non a simmetria sferica. Se questo accadesse il futuro cesserebbe di
essere prevedibile da condizioni iniziali date su una qualche ipersuperficie di
tipo spazio (Σ nel diagramma sopra).
Questo portò Penrose a suggerire la
Congettura di Censura Cosmica. “Singolarità nude non possono formarsi
in seguito ad un collasso gravitazionale in uno spaziotempo asintoticamente
piatto che è non singolare su una qualche ipersuperficie iniziale di tipo spazio
(superficie di Cauchy)”.
44
Capitolo 4
Buchi Neri Carichi
In questo capitolo generalizzeremo la soluzione di Schwarzschild al caso di
buchi neri massivi e carichi e ne studieremo le relative implicazioni.
4.1
Soluzione di Reissner-Nordstrom
Consideriamo l’azione di Einstein-Maxwell
1
S=
16πG
Z
d4 x
p
− g R − Fµν F µν .
(4.1.1)
L’inusuale normalizzazione del termine di Maxwell implica che l’intensità
della forza di Coulomb che si esercita tra due cariche Q1 e Q2 separate da una
distanza r (grande) in uno spazio piatto è
G | Q1 || Q2 |
.
r
(4.1.2)
Le equazioni di Einstein-Maxwell nel vuoto sono (cfr. (2.2.6) e (2.3.5))
Gµν = 2 Fµλ Fν
λ
1
ρσ
− gµν Fρσ F
4
∇µ F µν = 0 ,
(4.1.3)
(4.1.4)
Queste equazioni ammettono soluzione a simmetria sferica. Tale soluzione è la
45
Capitolo 4. Buchi Neri Carichi
soluzione di Reissner-Nordstrom (che generalizza la soluzione di Schwarzschild)
−1
2M Q2
2M Q2
2
dr2 + r2 sin2 θdφ2 + dθ 2 .
ds = − 1 −
+ 2 dt + 1 −
+ 2
r
r
r
r
(4.1.5)
Q
A = dt ,
Fµν = ∂µ Aν − ∂ν Aµ .
(4.1.6)
r
Il parametro Q è la carica del buco nero.
La metrica di Reissner-Nordstrom può anche essere scritta come
2
ds2 = −
∆ 2 r2 2
dt + dr + r2 dΩ2 ,
∆
r2
(4.1.7)
dove
∆ = r2 − 2Mr + Q2 = (r − r− )(r − r+ )
con r± , non necessariamente reali, dati da
p
r ± = M ± M 2 − Q2 .
(4.1.8)
(4.1.9)
In generale si devono considerare tre casi. A questo problema sono dedicate le
tre prossime sezioni.
4.2
Singolarità nude in RN
Come primo caso consideriamo quello per cui M < Q.
∆ non ha radici reali e quindi non esiste un orizzonte. La singolarità in
r = 0 risulta essere nuda. Questo caso è simile al caso già citato in cui M < 0
nella metrica di Schwarzschild. In accordo con la congettura di censura cosmica
un caso simile non può verificarsi in seguito ad un collasso gravitazionale. A
conferma di quanto abbiamo appena detto, consideriamo il caso di un guscio
di materia con carica Q e raggio R nella teoria Newtoniana della gravitazione
incorporando però:
1. equivalenza della massa inerziale con l’energia totale, dalla relatività
speciale,
2. equivalenza fra massa inerziale e massa gravitazionale, dalla relatività
generale.
46
Capitolo 4. Buchi Neri Carichi
GQ2 GM2
−
.
(4.2.1)
R
R
Tale legge esprime sostanzialmente il difetto di massa per un oggetto carico.
Infatti il primo termine corrisponde all’energia totale, il secondo è la massa a
riposo dell’oggetto, mentre il terzo e il quarto sono rispettivamente l’energia
potenziale Coulombiana e gravitazionale.
M = M0 +
Questa è un’equazione quadratica in M. L’unica soluzione sensata dell’equazione è
1
i
1 h 2
2 2 2
M( R) =
R + 4GM0 R + 4G Q
−R .
(4.2.2)
2G
Il guscio subirà il collasso solo se M decresce con R. Calcoliamo quindi
dM
G ( M 2 − Q2 )
=
.
dR
2MGR + R2
(4.2.3)
Dall’ultima relazione si vede che il collasso avviene solo se M > | Q|, come ci
aspettavamo.
Vediamo ora cosa succede ad M se facciamo il limite R → 0. Facendo tale
limite nella (4.2.2) si ottiene che
M → | Q| , indipendentemente da M0 .
(4.2.4)
La relatività generale risolve, dunque, il problema della self-energia infinita
nell’elettromagnetismo classico per una particella puntiforme. Una particella
puntiforme diventa un buco nero estremo di Reissner-Nordstrom (caso (iii)).
Osservazione L’elettrone ha M | Q|, dato che l’attrazione gravitazionale
è nettamente inferiore alla repulsione elettrostatica. Tuttavia l’elettrone è un
oggetto intrinsecamente quantistico, dato che la sua lunghezza Compton è
molto maggiore del suo raggio di Schwarzschild. I limiti di applicabilità della
relatività generale prevedono, invece, che
Lunghezza Compton
h̄/Mc
h̄c
=
= 2 1,
2
Raggio di Schwarzschild
MG/c
M G
cioè
M
h̄c 12
(4.2.5)
≡ M p (Massa di Planck) .
(4.2.6)
G
L’ultima relazione è in generale soddisfatta da ogni oggetto macroscopico, ma
47
Capitolo 4. Buchi Neri Carichi
non da particelle elementari.
4.3
Coordinate di Kruskal in RN
Come secondo caso consideriamo quello per cui M > | Q|.
∆ si annulla in r = r+ e in r = r− reali. La metrica risulta quindi singolare,
ma, come vedremo fra breve, queste sono singolarità coordinate. Per vedere
quanto abbiamo detto procediamo esattamente come nel caso di r = 2M nella
metrica di Schwarzschild. Definiamo la coordinata r ∗ in base a
dr ∗ =
r2
dr
dr =
∆
1 − 2M
r +
Q2
r2
.
(4.3.1)
In particolare, risulta che
1
1
|r − r + |
|r − r − |
+
,
r =r+
ln
ln
2κ+
r+
2κ−
r−
∗
dove κ± è dato da
κ± =
r± − r∓
.
2
2r±
(4.3.2)
(4.3.3)
Introduciamo ora le coordinate radiali nulle u, v come prima
v = t + r∗ , u = t − r∗ .
(4.3.4)
La metrica di Reissner-Nordstrom può essere, quindi, riscritta nelle coordinate
di Eddington-Finkelstein entranti (v, r, θ, φ)
ds2 = −
∆ 2
dv + 2dvdr + r2 dΩ2 .
r2
(4.3.5)
Queste coordinate sono non singolari ovunque eccetto per r = 0. Quindi le
singolarità che si incontrano per ∆ = 0 nella metrica di Reissner-Nordstrom sono
singolarità coordinate. Le ipersuperfici che si trovano imponendo r = costante
sono nulle quando grr = r∆2 = 0, cioè quando ∆ = 0. Questo, in particolare mostra
come r = r± siano ipersuperfici nulle, N± .
Proposizione 4.3.1. Le ipersuperfici nulle N± della metrica di Reissner-Nordstrom
∂
sono orizzonti di Killing del campo vettoriale di Killing ∂v
(estensione di ∂t∂ in coordinate
48
Capitolo 4. Buchi Neri Carichi
di Reissner-Nordstrom) con gravità superficiale κ± .
Dimostrazione. I vettori normali a N± sono
l± = f ±
∂
∂
vr ∂
+g
= f±
g
∂r
∂v
∂v
rr
(4.3.6)
(notare che grr = 0 su N± e gvr = 1) per qualche funzione arbitraria f ± che
ν ∇ l µ = 0, cioè tale che l sia tangente a
possiamo scegliere in modo che l±
ν ±
qualche curva parametrizzata in modo affine. In particolare si vede che
∂
= f ±−1 l± .
∂v
(4.3.7)
∂
L’ultima relazione mostra come N± siano orizzonti di Killing di ∂v
. Quest’ultimo, infatti, è un campo vettoriale di Killing perché la metrica in coordinate di
Eddington-Finkelstein è indipendente da v.
Dimostriamo ora che la gravità superficiale su N± è data proprio da κ± . A
tal proposito calcoliamo
1
kν ∇ν kr = Γr vv = − grr gvv ,r = 0 , su N±
2
1 ∂∆
1
kν ∇ν kv = Γv vv = − gvr gvv ,r = 2
2
2r ∂r
1
=
(r± − r∓ ) su N±
2
2r±
= κ± .
(4.3.8)
(4.3.9)
Quindi, in particolare,
kν ∇ν kµ = κ± kµ
(4.3.10)
Siccome k = ∂t∂ in coordinate statiche si ha che k2 → −1 per r → ∞. Possiamo
quindi identificare κ± con la gravità superficiale di N± .
Introduciamo ora un nuovo insieme di coordinate definito dalle equazioni
U ± = − e −κ ± u , V = e κ ± v .
49
(4.3.11)
Capitolo 4. Buchi Neri Carichi
Scegliendo dapprima i segni superiori, l’espressione della metrica in queste
coordinate è
κκ+ −1
−2κ+ r r
e
r
r
+
−
−
−
ds2 = − 2
dU + dV + + r2 dΩ2 ,
(4.3.12)
r − r−
r2
κ+
dove r è dato implicitamente in funzione di U + e V + dalla formula
r − r r − r +
−
U + V + = −e2κ+ r
r+
r−
κ+
κ−
.
(4.3.13)
La metrica espressa in queste coordinate copre quattro regioni della massima
estensione analitica della metrica di Reissner-Nordstrom,
Questo sistema di coordinate non copre la regione r ≤ r− dal momento che
la metrica ha una singolarità in r = r− , e, inoltre, risulta che il prodotto U + V +
in tale regione non è più reale.
Tuttavia possiamo introdurre un sistema di coordinate in cui la suddetta
regione non risulti singolari. Consideriamo, quindi, il sistema di coordinata
definito dalla (4.3.11), scegliendo, stavolta, i segni inferiori. La metrica, riscritta
in queste coordinate, diventa dunque
r+ r− e−2κ− r r+ ds2 = − 2
r+ − r
r2
κ−
κ−
κ + −1
50
dU − dV − + r2 dΩ2 .
(4.3.14)
Capitolo 4. Buchi Neri Carichi
In questo caso, invece, la dipendenza di r da U − V − è data implicitamente da
−
−
U V = −e
−2κ− r
r − r r − r −
+
r−
r+
κ−
κ+
.
(4.3.15)
Questa metrica copre quattro regioni intorno a U − = 0 e V − = 0.
La regione II è la stessa regione II coperta dalle coordinate (U + , V + ). Le
altre regioni, invece, sono nuove. Le regioni V e VI contengono la singolarità in
r = 0, che è di tipo tempo: la normale a r = costante è di tipo spazio per ∆ > 0,
come ad esempio in r < r− .
Sappiamo che la regione II del diagramma è connessa con uno spaziotempo
esterno nel passato (le regioni I, III, IV) e, quindi, per invarianza per riflessione
temporale, la regione III’ deve essere connessa ad un’altra regione esterna
(regioni I’, II’ e IV’).
51
Capitolo 4. Buchi Neri Carichi
Le regioni I’ e IV’ costituiscono un nuovo spaziotempo esterno asintoticamente piatto. Continuando in questo modo si possono trovare infinite regioni
del genere.
Collasso a simmetria sferica di un buco nero carico
Consideriamo una “palla di polvere” (senza pressione) sferica per cui ogni
particella di polvere ha un rapporto carica/massa dato da
γ=
Q
, |γ| < 1
M
(4.3.16)
dove Q è la carica elettrica totale e M la massa totale. La metrica fuori dalla
palla di polvere è quella di Reissner-Nordstrom con M > Q.
La traiettoria di una particella sulla superficie è la stessa di una particella,
con rapporto massa/carica dato proprio da γ, che cade radialmente verso il
centro nello spaziotempo di Reissner-Nordstrom. La traiettoria, in generale, non
seguirà un moto geodetico a causa della repulsione elettrostatica. Non è difficile
vedere che la traiettoria di un punto sulla superficie obbedisce all’equazione1
dr
dτ
2
= e2 − Ve f f ,
dove
Ve f f = 1 − (1 − eγ2 )
1 vedi
Problema 2 in Appendice
52
2M
Q2
+ (1 − γ2 ) 2
r
r
(4.3.17)
(4.3.18)
Capitolo 4. Buchi Neri Carichi
r0 =
1 − γ2 Q2
γ2 (1 − γ2 )
=
M.
1 − eγ2 M
1 − eγ2
(4.3.19)
Il collasso viene quindi arrestato dalla repulsione elettrostatica. Tutte le curve
di tipo tempo che entrano nella regione r < r+ sono costrette a entrare nella
regione r < r− , cosi che il “rimbalzo” avvenga nella regione V. La particella
di polvere quindi entra nella regione III’, esplode come un buco bianco nella
regione I’ e può così ricominciare il collasso.
Tutto ciò è illustrato nel seguente diagramma di Carter-Penrose
L’esistenza di “tunnel” che permettono di raggiungere altri “universi” è
alquanto bizzarra. Dobbiamo, infatti, considerare che l’esistenza di questi tunnel
dipende in modo molto sensibile dalle simmetrie assunte nello spaziotempo
53
Capitolo 4. Buchi Neri Carichi
di Reissner-Nordstrom, staticità e simmetria sferica. Queste simmetrie non
risultano essere esatte nella realtà e ogni piccola perturbazione ha un effetto
drammatico nella struttura interna del buco nero. I tunnel sono instabili e non
compaiono nella realtà fisica.
4.4
Buchi Neri estremi di RN
Come terzo e ultimo caso consideriamo quello per cui M = Q. Un corpo
siffatto è chiamato buco nero estremo di Reissner-Nordstrom. In questo caso
l’espressione della metrica è data da
M 2 2
dr2
2
2
ds2 = − 1 −
dt +
+ r dΩ .
M 2
r
1− r
(4.4.1)
In questa metrica si incontra una singolarità in r = M che, come vedremo, è una
singolarità dovuta al sistema di coordinate. Introduciamo quindi la coordinata
di Regge-Wheeler
r − M
M2
∗
−
(4.4.2)
r = r + 2M ln M r−M
che implica la seguente relazione per i differenziali
dr ∗ =
dr
.
1− M
r
(4.4.3)
Introduciamo le coordinate entranti di Eddington-Finkelstein come sopra.
L’espressione dell’intervallo diventa, quindi,
M 2 2
dv + 2dvdr + r2 dΩ2 .
ds2 = − 1 −
r
(4.4.4)
Questa metrica è non singolare sull’ipersuperficie nulla r = M. Seguendo un
ragionamento analogo a quello visto prima, si può dimostrare che r = M è un
∂
orizzonte di Killing del campo vettoriale di Killing ∂v
con gravità superficiale
nulla.
È importante notare che, siccome k è un vettore di tipo nullo su r = M, ma
di tipo tempo altrove, la regione II scompare e la regione I porta direttamente
alla regione V.
54
Capitolo 5
Buchi Neri Rotanti
In questo capitolo ci proponiamo di studiare quei buchi neri che, oltre alla
massa e alla carica, posseggono anche un momento angolare. In particolare
studieremo la soluzione di Kerr e le relative implicazioni.
5.1
Teoremi di unicità
Definizione 5.1.1. Uno spaziotempo asintoticamente piatto è stazionario se e
solo se esiste un campo vettoriale di Killing, k, che è di tipo tempo a ∞.
Osservazione 5.1.1. In generale, è possibile normalizzare k in modo che a infinito
k → −1.
Fuori da un possibile orizzonte k = ∂t∂ , dove t è il tempo coordinata. La
forma generale dell’intervallo di uno spaziotempo stazionario, quindi, assume
la forma
ds2 = gtt (~x )dt2 + 2gti (~x )dtdxi + gij (~x )dxi dx j .
(5.1.1)
Uno spaziotempo stazionario, inoltre, è detto statico se è invariante per inversione temporale. Questo equivale a richiedere che gti = 0. La metrica, in questo
caso, diventa
ds2 = gtt (~x )dt2 + gij (~x )dxi dx j .
(5.1.2)
Definizione 5.1.2. Uno spaziotempo asintoticamente piatto è detto essere simmetrico rispetto a un asse se esiste un campo vettoriale di Killing m (campo vettoriale
di Killing “assiale”) che è di tipo spazio a ∞ e le cui orbite sono chiuse.
55
Capitolo 5. Buchi Neri Rotanti
Possiamo scegliere un sistema di coordinate tale che
m=
∂
∂φ
(5.1.3)
dove φ è una coordinata che ha un intervallo di variabilità di 2π, in modo
2
che mr2 → 1 per r → ∞. Così, come per k, esiste una naturale scelta per la
normalizzazione per un campo vettoriale di Killing assiale in uno spaziotempo
asintoticamente piatto.
Teorema 5.1.1 (Birkhoff). Il teorema di Birkhoff afferma che ogni soluzione di vuoto
a simmetria sferica è statica.
Osservazione 5.1.2. Il fatto che ogni soluzione di vuoto a simmetria sferica sia
statica implica effettivamente che sia di Schwarzschild.
Osservazione 5.1.3. Una generalizzazione di questo teorema ad un sistema
di Einstein-Maxwell mostra che l’unica soluzione a simmetria sferica sia di
Reissner-Nordstrom.
Supponiamo ora di sapere solamente che la metrica esterna ad una stella sia
statica. Sfortunatamente non sappiamo ancora se si tratta di uno spaziotempo a
simmetria sferica. Per questo problema esiste però un teorema,
Teorema 5.1.2 (Israel). Il teorema di Israel afferma che ogni spaziotempo asintoticamente piatto, statico e nel vuoto, che è non singolare al di fuori e su un orizzonte degli
eventi, è di Schwarzschild.
Tuttavia riveste un ruolo ben più importante il seguente teorema
Teorema 5.1.3 (Carter-Robinson). Uno spaziotempo stazionario asintoticamente
piatto e simmetrico rispetto a un asse nel vuoto che è non singolare al di fuori e su un
orizzonte degli eventi fa parte della famiglia a due parametri di Kerr. I parametri sono
la massa M e il momento angolare J.
L’assunzione della simmetria rispetto a un asse è stata mostrata essere
non necessaria. Per cui risulta, effettivamente, che la stazionarietà implica la
simmetria assiale di una soluzione (Hawking, Wald).
Questi tre teoremi possono essere generalizzati per le equazioni di vuoto di
Einstein-Maxwell. Il risultato è che lo spaziotempo di un buco nero stazionario
può dipende solo da tre parametri: si dice che il buco nero faccia parte della
56
Capitolo 5. Buchi Neri Rotanti
famiglia a tre parametri di Kerr-Newman. In coordinate di Boyer-Lindquist (BL)
la metrica di Kerr-Newman è
ds2 = −
+
(∆ − a2 sin2 θ ) 2
(r 2 + a2 − ∆ )
dt − 2a sin2 θ
dtdφ
Σ
Σ
!
(r2 + a2 )2 − ∆a2 sin2 θ
Σ
sin2 θ dφ2 + dr2 + Σ dθ 2 ,
Σ
∆
(5.1.4)
dove
Σ = r2 + a2 cos2 θ
(5.1.5)
∆ = r2 − 2Mr + a2 + e2 .
(5.1.6)
I tre parametri sono M, a ed e. Il parametro a è legato al momento angolare
dalla relazione
J
a=
,
(5.1.7)
M
dove J è il momento angolare totale, mentre
p
e = Q2 + P2 ,
(5.1.8)
dove Q e P sono le cariche di monopolo elettrica e magnetica, rispettivamente.
La 1-forma di Maxwell, invece, è data da
Qr dt − a sin2 θdφ − P cos θ adt − (r2 + a2 )dφ
.
(5.1.9)
A=
Σ
Osservazione 5.1.4. Quando a = 0 la soluzione di Kerr-Newman si riduce alla
soluzione di Reissner-Nordstrom.
Osservazione 5.1.5. Facendo l’inversione φ → −φ cambia anche il segno di a,
possiamo quindi scegliere a ≥ 0 senza perdita di generalità.
Osservazione 5.1.6. La soluzione di Kerr-Newman ha le isometrie discrete t → −t
e φ → −φ.
5.2
Soluzione di Kerr
La soluzione di Kerr si ottiene dalla soluzione di Kerr-Newman ponendo e = 0.
In particolare risulta che
∆ = r2 − 2Mr + a2 ,
(5.2.1)
57
Capitolo 5. Buchi Neri Rotanti
mentre la Σ rimane invariata.
La metrica di Kerr, in coordinate di Boyer-Lindquist ha singolarità coordinate
in
1. θ = 0
2. ∆ = 0.
Riscriviamo ∆ come
∆ = (r − r+ )(r − r− ) ,
dove
r± = M ±
p
M 2 − a2 .
(5.2.2)
(5.2.3)
Anche in questo caso dobbiamo considerare tre casi che saranno presentati nelle
prossime sezioni.
5.3
Singolarità nude nella metrica di Kerr
Consideriamo dapprima il caso M2 < a2 .
∆ non ha radici reali e quindi non ci sono singolarità per r = r± . La metrica
ha ancora una singolarità di coordinate in θ = 0. Più significativa invece è la
singolarità in Σ = 0 che, invece, è una vera singolarità dello spaziotempo. Tale
singolarità si trova per i valori di r e θ dati da
r = 0, θ =
π
.
2
(5.3.1)
La natura di questa singolarità può essere discussa introducendo le coordinate
di Kerr-Schild (et, x, y, z) (che, inoltre, rimuovono la singolarità in θ = 0). Queste
sono definite da
Z r 2 + a2 et =
dt +
dr − r
(5.3.2)
∆
h Z a i
x + iy = (r + ia) sin θ exp i
dφ + dr
(5.3.3)
∆
z = r cos θ
(5.3.4)
che implicano che r = r ( x, y, z) sia data implicitamente da
r 4 − ( x 2 + y2 + z2 − a2 )r 2 − a2 z2 = 0 .
58
(5.3.5)
Capitolo 5. Buchi Neri Rotanti
In queste coordinate la metrica assume la forma
ds2 = −det2 + dx2 + dy2 + dz2
i2
2Mr3 h r ( xdx + ydy) − a( xdy − ydx ) zdz
et ;
+ 4
+
d
+
r
r 2 + a2
r + a2 z2
(5.3.6)
quest’ultima mostra chiaramente che lo spaziotempo è piatto quando M = 0
Le superfici con et e r costanti sono ellissoidi confocali che degenerano per
r = 0 nel disco z = 0, x2 + y2 ≤ a2 .
La regione del grafico con θ = π2 corrisponde al contorno del disco x2 + y2 =
a2 . Si vede così che la singolarità di curvatura si presenta sul bordo del disco.
In generale r non deve essere necessariamente maggiore di zero. Lo spaziotempo può essere continuato analiticamente attraverso il disco in un’ altra
regione asintoticamente piatta con r < 0.
Struttura Causale
Dal momento che il sistema gode di simmetria assiale abbiamo bisogno di un
diagramma tridimensionale per studiare la struttura causale dello spaziotempo.
Tuttavia le sottovarietà con θ = 0, π2 sono totalmente geodetiche, cioè se una
geodetica è inizialmente tangente alla sottovarietà essa rimarrà tale durante
tutto il moto. Possiamo così dare i diagrammi di Carter-Penrose per queste
sottovarietà.
59
Capitolo 5. Buchi Neri Rotanti
Per θ = π2 ogni punto del diagramma rappresenta un cerchio (si ha infatti
che 0 ≤ φ < 2π). Ogni geodetica radiale entrante urterà la singolarità ad anello
in r = 0, che è chiaramente nuda.
Per θ = 0, invece, si considerano solo geodetiche sull’asse di simmetria.
Geodetiche radiali nulle passano attraverso il disco in r = 0 e finiscono nella
regione r < 0. Possiamo riassumere i due diagrammi in uno solo
Tuttavia lo spaziotempo risulta non avere senso fisico. Consideriamo, infatti,
60
Capitolo 5. Buchi Neri Rotanti
la norma del campo vettoriale di Killing m =
2
m = gφφ
Poniamo ora
r
a
r2
= a sin θ 1 + 2
a
2
!
2
∂
∂φ
Ma2
+
r
= δ (piccolo) e consideriamo θ =
π
2
2 sin4 θ
1+
a2
r2
cos2 θ
!
.
(5.3.7)
+ δ. Risulta allora
Ma
+ O(δ) , per δ 1
δ
< 0 per piccoli valori negativi di δ
m2 = a2 +
Si vede così che m diventa un vettore di tipo tempo vicino alla singolarità ad
anello nella regione r < 0; inoltre le orbite di m sono chiuse. Lo spaziotempo così
costruito ammette curve di tipo tempo chiuse. In generale ciò non è possibile
perché si violerebbe il principio di causalità.
Tuttavia dobbiamo ricordarci che stiamo considerando uno spaziotempo con
singolarità nuda e, in virtù del principio di censura cosmica, una tale eventualità
non può verificarsi a seguito di un collasso gravitazionale.
5.4
Coordinate di EF in Kerr e buchi neri estremi
Consideriamo ora il caso M2 > a2 .
Sotto questa condizione si ha ancora una singolarità ad anello, però la
metrica (espressa in coordinate BL) è singolare in r = r+ e r = r− . Queste, come
vedremo, sono singolarità dovute alla scelta del sistema di coordinate.
Introduciamo le coordinate v e χ definite rispetto alle vecchie variabili da
dv = dt +
r 2 − a2
dr
∆
(5.4.1)
a
dr .
(5.4.2)
∆
Si può, quindi, riscrivere la metrica di Kerr nelle coordinate (v, r, θ, χ), analoghe
dχ = dφ +
61
Capitolo 5. Buchi Neri Rotanti
alle coordinate di Eddington-Finkelstein per la metrica si Schwarzschild
∆ − a2 sin2 θ 2
2a sin2 θ (r2 + a2 − ∆)
dv + 2dv dr −
dvdχ
Σ
Σ
2
(r + a2 )2 − ∆a2 sin2 θ
− 2a sin2 θ dχ dr +
sin2 θdχ2 + Σdθ 2 .
Σ
ds2 = −
(5.4.3)
La metrica è ora non singolare in ∆ = 0. Questo dimostra che le singolarità in
r = r± della metrica, scritta in coordinate di BL, sono singolarità coordinate.
Proposizione 5.4.1. Le ipersuperfici r = r± sono orizzonti di Killing dei campi
vettoriali di Killing
a m,
(5.4.4)
ξ± = k + 2
r ± + a2
con gravità superficiale data da
κ± =
r± − r∓
2 + a2 )
2(r ±
(5.4.5)
Dimostrazione. Siano N± le ipersuperfici r = r± . I vettori normali, valutati su
N± , sono
l± = f ± gµr ∂µ , per qualche funzione non nulla f ±
!
!
2 + a2
r±
a
∂
∂
+ 2
=− 2
f±
∂v r±
r± + a2 cos2 θ
+ a2 ∂χ
In particolare risulta che
ξ± =
∂
a
∂
+ 2
.
2
∂v r± + a ∂χ
(5.4.6)
Per prima cosa notiamo che
2
l±
∝ gvv +
2a
r 2 + a2
gvχ +
a2
r 2 + a2
gχχ per cui N± sono ipersuperfici nulle. Dato che ξ ± N±
∆ =0
=0
(5.4.7)
∝ l± , tali ipersuperfici sono
effettivamente orizzonti di Killing di ξ ± .
ν ∇ ξ µ . Calcolando tale prodotto si trova l’espressione
Rimane da calcolare ξ ±
ν
per κ± .
62
Capitolo 5. Buchi Neri Rotanti
Questi risultati possono essere utilizzati per trovare coordinate del tipo
di Kruskal e ottenere la massima estensione analitica della metrica di KerrNewman. Anche in questo caso si ha un reticolo infinito di regioni isometriche.
Velocità angolare dell’orizzonte
L’orizzonte degli eventi è un orizzonte di Killing di
ξ = k + ΩH m ,
dove
ΩH =
In coordinate per cui k =
J
a
p
=
.
2 + a2
r+
2M M2 + M4 − J 2
∂
∂t
em=
∂
∂φ
(5.4.8)
(5.4.9)
si ha che
ξ µ ∂µ (φ − Ω H t) = 0 ,
(5.4.10)
cioè φ = Ω H t + costante su orbite di ξ, mentre φ rimane costante su orbite di k.
Le particelle che si muovono su orbite di ξ ruotano con velocità angolare
Ω H relativamente a particelle statiche, quelle sulle orbite di k, e quindi relative
ad un sistema stazionario a infinito. Siccome le geodetiche nulle generatrici
dell’orizzonte seguono le orbite di ξ si ha che il buco nero ruota con velocità
angolare Ω H .
Buchi neri estremi
Prendiamo ora il caso di M2 = a2 .
Questa soluzione è chiamata buco nero estremo di Kerr. In questo caso si ha un
orizzonte di Killing in r = M con gravità superficiale κ = 0 e campo vettoriale
di Killing
a
ξ = k + ΩH m , ΩH =
.
(5.4.11)
2M
63
Capitolo 5. Buchi Neri Rotanti
5.5
Ergosfera
Nonostante k sia un vettore di tipo tempo a infinito non è necessario che sia
tale ovunque al di fuori dell’orizzonte. Nello spaziotempo di Kerr
2Mr
∆ − a2 sin2 θ
k2 = gtt = −
=− 1− 2
Σ
r + a2 cos2 θ
!
(5.5.1)
e, quindi, k è di tipo di tempo se
r2 + a2 cos2 θ − 2Mr > 0 .
(5.5.2)
Per M2 > a2 l’ultima relazione implica che, perché k sia di tipo tempo, deve
essere
p
r > M + M2 − a2 cos2 θ .
(5.5.3)
La frontiera di quest’ultima regione, cioè l’ipersuperficie
r=M+
p
M2 − a2 cos2 θ ,
(5.5.4)
è chiamata ergosfera. L’ergosfera si incontra con l’orizzonte degli eventi quando
θ = 0 o π, per tutti i restanti valori di θ giace completamente fuori. Quindi k
diventa un vettore di tipo spazio in una certa regione al di fuori dell’orizzonte.
Questa regione è chiamata ergoregione.
64
Capitolo 5. Buchi Neri Rotanti
5.6
Processo Penrose
Supponiamo di avere una particella che si avvicini ad un buco nero di Kerr
lungo una geodetica. Chiameremo p il suo quadrimpulso. Possiamo identificare
l’energia della particella come una costante del moto data da
E = −p · k .
(5.6.1)
Supponiamo ora che la particella decada in altre due particelle, una delle quali
finisce nel buco nero mentre l’altra, invece, scappa a infinito.
Dalla conservazione dell’energia si ha che
E2 = E − E1 ,
(5.6.2)
dove E1 e E2 sono, rispettivamente, l’energia della prima e della seconda particella ottenute dal decadimento. Normalmente si ha che E1 > 0, in modo che
E2 < E, ma, dato che l’energia della prima particella è data da
E1 = − p1 · k ,
(5.6.3)
non necessariamente si ha che E1 > 0, dal momento che che nella ergoregione k
è di tipo spazio. Quindi, se il decadimento avviene nella ergoregione, dobbiamo
necessariamente avere E2 > E. È stata quindi estratta energia dal buco nero. Il
processo di estrazione di energia dal buco nero è chiamato processo Penrose.
65
Appendice A
Esempi svolti
A.1
Problema 1
Trovare i raggi delle orbite circolari per una particella nel campo di un buco
nero di Schwarzschild.
Svolgimento
Risolviamo il problema non partendo dall’equazione del moto (2.1.1), ma
utilizzando la teoria di Hamilton-Jacobi. In relatività ristretta l’equazione di
Hamilton-Jacobi per una particella di massa m è data da
gµν
∂S ∂S
+ m2 = 0 ,
µ
ν
∂x ∂x
(A.1.1)
dove S è l’azione della particella. In virtù del Principio di minimo accoppiamento
gravitazionale l’equazione rimane tale anche in relatività generale e, in questo
caso, la metrica è quella di Schwarzschild.
Innanzitutto sappiamo che il problema è a simmetria centrale e, come tale,
avviene su un piano. Scegliamo per semplicità il piano θ = π2 . L’equazione
diventa
2M
1−
r
−1 ∂S
∂t
2
2M
− 1−
r
∂S
∂r
2
1
− 2
r
∂S
∂φ
2
− m2 = 0 .
(A.1.2)
Scegliamo l’azione della forma
S = − Et + Lφ + Sr (r ) ,
66
(A.1.3)
Appendice A. Esempi svolti
dove E e L sono costanti del moto che corrispondono all’energia e al momento
angolare della particella. Sostituendo quest’ultima nell’equazione di HamiltonJacobi si trova che
Sr ( r ) =
Z
"
E2 1 −
2M
r
−2
− m2 +
L2
r2
1−
2M
r
−1 # 12
dr .
(A.1.4)
La dipendenza r = r (t) si trova, secondo le regole generali della teoria di
∂S
Hamilton-Jacobi, ponendo ∂E
= costante. Da ciò si trova
t=
E
M
Z 1−
2M
r
−1 "
E2
M2
− 1+
L2
m2 r 2
1−
2M
r
#− 21
dr
(A.1.5)
o, in forma differenziale,
2M
1−
r
−1
12
dr
1 2
L2
2M
2
.
=
E −m 1+ 2 2
1−
dt
E
r
m r
(A.1.6)
Definiamo l’“energia potenziale efficace” V (r ) la funzione
V (r ) = m
2M
1−
r
L2
1+ 2 2
m r
−1
2M
1−
r
12
,
(A.1.7)
12
dr
1 2
2
=
E − V (r ) .
dt
E
(A.1.8)
La condizione E > V (r ) definisce quindi le regioni ammissibili del moto come in
meccanica non relativistica. Le orbite circolari si trovano imponendo V 0 (r ) = 0
e E = V (r ).
La prima di queste due condizioni dà
r
r1,2
L2
12m2 M2
=
1± 1−
.
2M 4m2 M2
L2
(A.1.9)
Studiando il segno di V 0 (r ) si trova che il segno superiore in r1,2 si riferisce
alle orbite circolari stabili (minimo di V (r )). In particolare risulta che l’orbita
67
Appendice A. Esempi svolti
circolare stabile più vicina al centro è quella per cui
r = 6M ,
A.2
L=
√
r
12 mM ,
E=
8
m.
9
(A.1.10)
Problema 2
L’azione per una particella di massa m e carica q è
S=
Z
1 −1 µ ν
1 2
µ
dλ e ẋ ẋ gµν ( x ) − m e − q ẋ Aµ ( x ) ,
2
2
(A.2.1)
dove Aµ ( x ) è il quadripotenziale del campo elettromagnetico. Si può mostrare
che se
Lξ Aµ = ξ ν ∂ν Aµ + (∂µ ξ ν ) Aν = 0
(A.2.2)
per un campo vettoriale di Killing ξ, allora S è invariante, al primo ordine in
ξ, sotto la trasformazione x µ → x µ + αξ µ ( x ). Verificare che la la corrispondente
carica di Noether associata
− ξ µ (muµ − qAµ ) ,
(A.2.3)
dove uµ è la quadrivelocità della particella, è una costante del moto. Verificare,
inoltre, per la soluzione di Reissner-Nordstrom nel vuoto, con massa totale M e
carica totale Q, che Lξ A = 0 per k = ∂t∂ e, quindi dedurre, per m 6= 0, che
2M Q2
+
1−
r
r
dt
qQ
=e−
,
dτ
m r
(A.2.4)
dove τ è il tempo proprio della particella e e è l’energia per unità di massa.
Mostrare che la traiettoria r (t) di una particella massiva con momento angolare
nullo soddisfa
dr
dτ
2
2
2
qQ 2M
Q
q
= ( e − 1) + 1 − e
+ 2 −1 2 .
mM
r
r
r
2
(A.2.5)
Svolgimento
Abbiamo visto che per un problema del genere le equazioni di Einstein-
68
Appendice A. Esempi svolti
Maxwell sono, nel vuoto,
1
Gµν = 2 Fµλ Fν λ − gµν Fρσ F ρσ ,
4
(A.2.6)
∇µ F µν = 0 ,
(A.2.7)
che ammettono soluzione data dalle (4.1.5), (4.1.6). Inoltre la particella risente
della forza di Lorentz
Duµ
= qF µν uν .
(A.2.8)
m
dλ
Definendo la carica di Noether CN
CN = −ξ µ (muµ − qAµ )
(A.2.9)
si ha che
dCN
= 0,
(A.2.10)
dλ
in virtù delle (A.2.2), (A.2.8) e delle proprietà di simmetria dei vettori di Killing.
Il quadripotenziale del campo elettromagnetico di RN è dato da
A=
Non è difficile vedere che, per k =
Q
dt .
r
(A.2.11)
∂Aµ
= 0.
∂t
(A.2.12)
∂
∂t ,
Lk Aµ =
Dall’ultima relazione si ha che la carica di Noether, associata a k, è data da
2M Q2 dt
qQ
CN = m 1 −
+ 2
+
,
(A.2.13)
r
dτ
r
r
mentre, lontano dal buco nero, la stessa relazione dà
CN = me .
Per cui risulta che
2M Q2
1−
+
r
r
69
dt
qQ
=e−
.
dτ
m r
(A.2.14)
(A.2.15)
Appendice A. Esempi svolti
Partendo, ora, dalla metrica (4.1.5) si ha che per un moto puramente radiale
2M Q2 −1 2
2M Q2 2 dr .
ds2 = −dτ 2 = − 1 −
+ 2 dt + 1 −
+ 2
r
r
r
r
(A.2.16)
Ponendo ora r = r (t) si ha, dopo semplici passaggi,
2M Q2
ṙ = 1 −
+
r
r
2
2 2M Q2
+
1− 1−
r
r
qQ
e−
mr
−2 .
(A.2.17)
Effettuando ora il cambio di variabili
dr dτ
dr
=
dt
dτ dt
si trova
dr
dτ
2
=
qQ
e−
mr
2
2M Q2
− 1−
+ 2
r
r
(A.2.18)
,
(A.2.19)
che, rimescolata, dà
dr
dτ
2
2
2
Q
qQ 2M
q
= ( e − 1) + 1 − e
+ 2 −1 2 .
mM
r
r
r
2
70
(A.2.20)
Bibliografia
[1] S.W. Hawking e G.F.R. Ellis: The large scale structure of space-time,
Cambridge University Press, 117-124, 256-289,308-323;
[2] P.K. Townsend: Black Holes lecture notes, DAMPT, University of Cambridge,
11-90;
[3] L.D. Landau e E.M. Lifschitz: Fisica Teorica, Vol.2, Teoria dei campi, Editori
Riuniti university press, 296-429;
[4] T.Ortìn: Gravity and strings, Cambridge University Press, 187- 212;
[5] S.Weinberg: Gravitation and cosmology: principles and applications of the
general theory of relativity, John Wiley and Sons, 1-248;
[6] E. Poisson: A Relativist’s Toolkit: The Mathematics of Black-Hole Mechanics,
Cambridge University Press, 163-205;
[7] V. Barone: Relatività. Principi e applicazioni, Bollati e Boringhieri, 463-509 ;
[8] R.M. Wald: General Relativity, The University of Chicago Press, 298-329,
437-444;
[9] H. Goldstein, C. Poole, J. Safko: Meccanica classica, Zanichelli, 263-314 .
71