Regolatore di giri per Speed 400
con circuito di eliminazione batterie BEC
Introduzione:
Questo progetto è basato su una pubblicazione simile di Milan Lulic sul giornale tedesco
ElektroModell. Il progetto originale è basato sulla tecnologia del montaggio superficiale di
componenti, mentre la mia rielaborazione prevede componenti standard di commercio, infatti
questo tipo di costruzione penso che si adatti meglio al mondo dell'aeromodellista nostrano,
poco abituato a programmare i PIC con interfacce per computer e linguaggi strani. Non utilizzo
un controllore programmabile per cui questo circuito è del tipo analogico.
Questo progetto è adatto a motori Speed 400 con correnti relativamente basse. Il circuito BEC
consente di eliminare la batteria dedicata per la ricevente e consente un guadagno in termini
di peso. Prossimamente proverò anche un circuito senza BEC ma per correnti maggiori.
Specifiche:
Dimensioni: 33 mm x 28 mm x 15 mm
Peso: circa 14 gr. senza connettori per batteria e motore
Corrente massima continua: 12A
Corrente massima di picco: 18A
Caduta di tensione: 120mV a 12A
Cicuito BEC con cut-off a basso voltaggio
Interruttore per accensione
A trasmettitore spento il motore è fermo
Funzione fail safe spegne motore con falsi segnali
Uso a partire da 6 fino a 10 celle
Costo per costruzione: circa 20.000 ITL
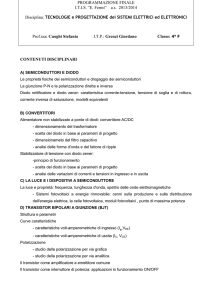
Descrizione del circuito:
Il circuito inizia con un buffer costituito da C1, R1, e Q1 e che provvede a fornire un
isolamento tra la ricevente ed il resto del circuito. Inoltre rende il funzionamento del circuito
completamente indipendente dalla ricevente utilizzata (sarà necessario regolare R8 in caso di
cambio della ricevente).
R2, R3 e C2 formano un integratore che produce un voltaggio in uscita proporzionale
all'ampiezza dell'impulso del segnale di entrata. Questo voltaggiovaria approssimativamente
tra 1.15V per un ingresso di 1ms a 1.45V per un ingresso di 2ms (a 50 impulsi al secondo).
Il diodo Z1A assieme a R4, R8 e C3 formano un generatore di onde triangolari a 2.5kHz. R8
regola le soglie superiori e inferiori dell'onda triangolare (attenzione alle interferenze, anche se
la frequenza di lavoro non dovrebbe dare problemi).
Quando è correttamente regolata, l'onda triangolare (che appare attraverso C3) oscillerà tra
circa 1.2V e 1.4V. questo copre circa i 2/3 del range che copre l'integratore di tensione.
Z1B viene utilizzato come un comparatore che confronta la tensione dell'integratore con l'onda
triangolare. Quando la tensione dell'integratore è superiore a quella dell'onda triangolare,
l'uscita di Z1B è alta, quando è inferiore è bassa.
Con l'acceleratore a zero il voltaggio dell'integratore (1.15V) è sempre inferiore a quello
dell'onda triangolare (1.2V-1.4V), così l'uscita di Z1B rimane bassa.
A piena potenza la tensione dell'integratore (1.45V) rimane sempre sopra la tensione dell'onda
triangolare e Z1B rimane sempre alto.
A metà potenza la tensione dell'integratore (1.3V) è sopra quella dell'onda triangolare per
metà del tempo, così per metà del tempo Z1B ha uscita alta e per metà bassa.
Quando Z1B ha uscita bassa, il MOSFET Q2 viene spento attraverso R12, quando Z1B ha
l'uscita alta Q2 viene acceso attraverso R9 e R12.
L'integrato LM2940CT-5 (regolatore di tensione a bassa caduta) si occupa del circuito BEC.
La corrente dalla batteria (per motore e RX) passa attraverso l'interruttore di accensione S1 e
viene filtrata attraverso C6 e C7. Il 2940 produce 5V sulla sua uscita, C4 funziona come filtro e
stabilizza il regolatore. C5 serve a fornire un filtro aggiuntivo.
D1,D2,R11 e C8 formano il circuito di taglio (cut-off) a bassa tensione. D2 è un diodo Zener
che deve essere scelto in base al numero di celle utilizzate (vedi oltre) e effettua il taglio della
corrente. Il valore di D2 è il valore di taglio desiderato meno 0.7 volts (es. con 7 celle da
600AA un valore ragionevole di taglio è dato da 6.3V, cioè 0.9V per cella, così il valore scelto
per D2 deve essere 5.6V). Non appena il valore della tensione della batteria del motore
scende sotto il valore di taglio scelto, la tensione alla giunzione tra D1,D2,R11 e C8 scende
sotto i 0.7V, e questo fa scendere il voltaggio al piedino (pin) 5 di Z1 sotto il valore di 1.4V.
R11 e C8 servono per filtrare i disturbi generati dal motore dalla zona di controllo del circuito.
Nella tabella seguente alcuni valori suggeriti per il diodo Zener D2 in funzione del numero di
celle tra 6 a 10.
Numero di celle Tensione Zener Tensione di Cut-off per Cella
6
4.7V
0.90V
6
5.1V
0.97V
7
5.6V
0.90V
7
6.2V
0.99V
8
6.8V
0.94V
8
7.5V
1.03V
9
7.5V
0.91V
9
8.2V
0.99V
10
8.2V
0.89V
10
9.1V
0.98V
Per evitare ogni problema viene anche mostrato il valore Zener più vicino e più facilmente
reperibile.
Valori di tensione di cut-off intorno a 0.9 per cella vanno bene per celle ad alta resistenza
interna tipo le 600AA o le 600AE, mentre valori di circa 1.0V per cella vanno bene per celle a
bassa resistenza interna, come le 1000SCR. Notate che il sistema di cut-off non è un semplice
sistema tutto-niente, infatti il cut-off abbassa la tensione all'integratore sul pin 5 anche
riducendo il comando sull'acceleratore. La potenza continuerà ad essere ridotta fino a quando
la la tensione della batteria risale sopra la soglia di cut-off. così, mentre la batteria scende il
regolatore di giri abbassa la potenza per mantenere più alto possibile il valore della tensione al
BEC, perciò appena sentite questa parzializzazione significa che è tempo di chiudere il gas e
atterrare.
Considerazioni sul BEC:
Il circuito BEC è formato dal regolatore di tensione LM2940. Senza un dissipatore e con un
ragionevole raffreddamento dato dalla velocità dell'aria durante il volo, questo regolatore può
dissipare fino a 2W senza surriscaldarsi. Infatti la potenza dissipata in calore è uguale alla
corrente per la tensione, dove la tensione è la differenza di tensione tra la batteria e l'uscita
(5V). Ciò significa che la corrente che può fornire alla ricevente ed ai servi è limitata e scende
appena scende la tensione della batteria. La tabella seguente indica i limiti di corrente
utilizzando da 6 a 10 celle.
Numero di celle Massima corrente al BEC
6
0.91A
7
0.58A
8
0.44A
9
0.34A
10
0.28A
Utilizzando questa tabella e le informazioni fornite dal costruttore della ricevente e dei servi è possibile
determinare il numero massimo di servi che si possono utilizzare contemporaneamente con un dato
numero di celle. Tipicamente un sistema con ricevente e tre servi assorbe circa 300mAh in media, ma
può arrivare anche a punte di 1A.
Nel caso si utilizzino alianti consiglio di non utilizzare il BEC ma un pacco da 270mAh per la ricevente,
così è possibile veleggiare senza preoccupazioni anche dopo che è finito il motore. Raccomando
l'utilizzo di questo circuito solo per modelli sportivi che comunque atterrino poco dopo la fine della
batteria del motore.
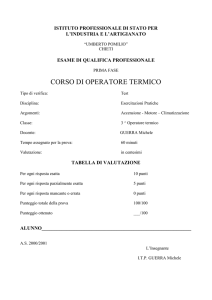
Costruzione:
La cosa migliore è costruire il circuito su una basetta con le piste stampate
Lato Rame - Dimensioni 33mm x 28mm
Ci sono alcune cose da puntualizzare per quanto riguarda la costruzione:
I terminali per il ricevente (ricavati da una prolunga servo) devono essere collegati
direttamente alla basetta nella parte inferiore (nel lato destro secondo la disposizione sopra).
Tipicamente il colore dei cavi è:
CH-: Marrone o Nero
SIG: bianco,Giallo,Arancione
CH+: Rosso
L'interruttore di accensione è connesso con due fili ai due fori segnati con S1 nel diagramma seguente.
Diagramma piazzamento componenti
Iniziate a installare le resistenze e i condensatori, cioè tutti i componenti più bassi. I resistori
dovrebbero essere installati in piedi, eccetto R12 che è sdraiato. Siate sicuri di orientare
C2,C7 e C8 correttamente, cioè con il lato positivo indicato con il simbolo "+" sulla carcassa.
Montate D1,D2 e Q1 di nuovo stando attenti ad orientarli correttamente (i terminali negativi di
D1 e D2 sono segnati).
Saldate il ponticello sotto Z1 e poi il soket per l'integrato Z1.
Saldate C4 alla fine, lasciate le estremità lunghe abbastanza per poter piegare
orizzontalmente C4 sull'integrato Z1, dopo aver installato Z1 nel suo socket.
Per evitare cortocircuiti mettete dei piccoli pezzi di tubetto di plastica resistente al calore sulle
estremità di C4. Siate certi di orientare C4 correttamente.
Collegate un opportuno cavo elettrico ai terminali segnati con MOTOR+, MOTOR-, BATT+ e
BATT- sulla basetta, effettuando delle saldature abbondanti per far passare la corrente
necessaria al motore.
Il cavo MOTOR+ e BATT+ può anche essere un unico filo collegato a metà alla basetta.
Installate il MOSFET con i suoi segni verso il lato MOTOR- della basetta. Collegate le due
estremità di alimentazione del MOSFET in modo che siano allacciate ai fili MOTOR- e BATTInstallate il LM2940 orientato nella stessa direzione del MOSFET (il segno verso il lato
MOTOR- della basetta).
Prova e regolazione:
Controllate bene il vostro lavoro assicurandovi che non ci siano dei ponti indesiderati e che la
basetta sia come da figure. Controllate se tutti i pezzi sono nella correta posizione e che non si
muovano, ma non inserite Z1 nel suo socket per adesso.
Allacciate un pacco batteria da 6 a 10 celle ai terminali BATT- e BATT+ e utilizzando un
voltmetro controllando che non ci sia alta tensione sui terminali della ricevente (non volete
friggerla vero?).
Controllate anche che ci siano 5V tra CH- e CH+.
Staccate l'alimentazione, inserite Z1 nel socket, allacciate la presa nell'apposito canale della
ricevente, allacciate la batteria del motore e collegate una lampada da 12V del tipo da
automobile ai terminali MOTOR+ e MOTOR-.
Muovete la leva del motore sulla trasmittente in posizione di OFF e accendete il sistema con
l'interruttore S1.
A questo punto la lampada si può accendere o no (eh eh eh..). Se la lampada si accende
usate un piccolo cacciavite per ruotare R8 in senso antiorario fino allo spegnimento.
Se la lampada non si accende usate il cacciavite in senso orario fino ad accenderla e poi
tornate indietro fino allo spegnimento.
Spegnate tutto, scollegate la batteria e collegate il motore con la sua elica montata. Non
dimenticate di installare un diodo 1N4004 attraverso i terminali del motore, con il terminale
segnato da una banda al positivo del motore.
Assicuratevi che il motore sia saldamente ancorato e che l'elica giri libera.
Accendete di nuovo tutto seguendo questo ordine:
1. Leva motore della trasmittente su OFF
2. Trasmettitore acceso
3. Interruttore S1 acceso
Se tutto è stato fatto bene con la lampada, il motore dovrebbe essere completamente fermo oppure avere
piccole oscillazioni o girare molto lentamente.
Regolate R8 in modo che con la leva dell'acceleratore su OFF il motore sia completamente spento, ma
in modo che appena si avanza di una o due tacche il motore inizi a oscillare. Fate attenzione all'elica
durante le regolazioni
Quando il motore parte emetterà un forte fischio, è semplicemente l'armatura interna del motore che
oscilla alla velocità di controllo di 2500Hz ed è un fenomeno abbastanza normale.
Quando è tutto a posto ed il motore parte alla corretta posizione della leva, provate ad accelerare
lentamente fino al massimo.
Fate attenzione alla velocità del motore, dovrebbe accelerare appena muovete la leva di comando, ma
dovrebbe smettere molto prima che raggiungiate la massima escursione. Quando arrivate al massimo
muovete il trim in modo da essere sicuri che non salga più di giri.
Se sentite che il motore continua a salire anche muovendo il trim allora dovete sostituire R5 con una
resistenza da 120 ohm per rimpicciolire il range di giri del motore e renderlo adatto alla vostra radio.
Installazione:
L'installazione è molto semplice, basta collegare tutto come avete fatto nelle prove precedenti.
Installate l'interruttore di accensione in un punto appropriato. Dovete essere assolutamente
sicuri che la parte inferiore del circuito non tocchi nessuna parte metallica.
Per prevenire la corrosione normalmente spruzzo un po di spray al silicone.
Cercate di tenere i cavi della batteria e del motore i più corti possibile. Accertatevi anche che il
vostro motore sia equipaggiato con un diodo e con condensatori di soppressione (utilizzo
normalmente un condensatore da 0.1uF sui terminali del motore e uno da 0.047uF tra ogni
terminale e la struttura del motore - Non utilizzate condensatori elettrolitici).
Utilizzate un fusibile, naturalmente non installatelo tra la batteria e il regolatore, infatti se fate
così e bruciate il fusibile in volo perdereste completamente il controllo del modello, perchè la
ricevente che viene alimentata dal circuito BEC non è più sotto tensione. Installate il fusibile
tra il regolatore ed il motore, il punto migliore è il cavo segnato con MOTOR+ .
Prima del volo fate sempre un controllo di portata, con il motore spento dovreste avere la
stessa portata che con il motore acceso (per la maggior parte delle radio la portata è circa
30m con l'antenna abbassata), o al limite arrivare all'85% della portata con motore acceso.
Modifiche:
Se pensate di utilizzare questo circuito con 8 o 10 celle potreste sostituire il LM2940CT-5 con
il più comune LM7805. Se fate questo il diodo Zener di cut-off non deve essere inferiore a
6.3V,sennò la tensione di cut-off sarà sotto il livello dei 7V e il regolatore non può fornire i 5V
alla ricevente.
Se non riuscite a trovare un particolare diodo Zener potreste costruirne uno utilizzando un
Zener a voltaggio inferiore e un normale diodo (1N914 o 1N4148) unito in serie.
Saldate il diodo Zener con la parte segnata in basso nel foro per D2 più vicino al lato della
basetta (è quello segnato con "-") e installate il diodo normale anche lui con la parte segnata
verso il basso nell'altro foro per D2, poi unite i due terminali rimasti liberi.
La tensione di questo Zener sarà la tensione del diodo Zener scelto più 0.7V.
Lista componenti:
Componente Descrizione
R1
1M ¼W
R2
220k ¼W
R3
33k ¼W
R4
22k ¼W
R5
100k ¼W
R6
1k ¼W
R7
68k ¼W
R8
10k trimmer
R9
470 Ohm ¼W
R10
470k ¼W
R11
1.2K ¼W
R12
100 Ohm ¼W
C1,C3
22nF (0.022µF)
C2
2.2µF tantalio
C4
47µF tantalio o elettrolitico
C5,C6
0.1µF
C7
10µF tantalio o elettrolitico
C8
0.22µF tantalio
D1
1N914 or 1N4148
D2
Diodo Zener
Q1
2N3904, 2N4401, o equivalente.
Z1
LM393 doppio comparatore
Q2
IRL2203
Regolatore
LM2940CT-5 or 7805
S1
Interruttore
Note finali:
Qualcuno potrebbe essere interessato a modificare il circuito in modo da utilizzarlo (per
barche o automodelli) in un senso e nell'altro.
Un circuito di questo tipo ha bisogno di più MOSFETS saldati su un percorso a H con il motore
nel mezzo. Praticamente diventa un circuito complicatissimo, e per favore non chiedetemi di
proporlo....
Un'altra possibilità è quella di utilizzare un canale separato per controllare un relè di
inversione. Lo svantaggio è quello di utilizzare un canale aggiuntivo ed in più non c'è niente
che impedisca l'inversione del moto quando siete al massimo...