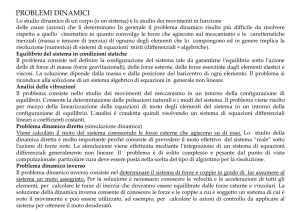
PROBLEMI DINAMICI
Lo studio dinamico di un corpo (o un sistema) è lo studio dei movimenti in funzione
delle cause (azioni) che li determinano In generale il problema dinamico risulta più difficile da risolvere
rispetto a quello cinematico in quanto coinvolge le forze che agiscono sul meccanismo e le caratteristiche
inerziali (massa e tensore di inerzia) di ognuno degli elementi che lo compongono ed in genere implica la
risoluzione (numerica) di sistemi di equazioni misti (differenziali + algebriche).
Equilibrio del sistema in condizioni statiche
Il problema consiste nel definire la configurazione del sistema tale da garantirne l'equilibrio sotto l'azione
delle di forze di massa (forze gravitazionali), delle forze esterne, delle forze esercitate dagli elementi elastici e
viscosi. La soluzione dipende dalla massa e dalla posizione del baricentro di ogni elemento. Il problema si
riconduce alla soluzione di un sistema algebrico di equazioni in generale non lineare.
Analisi delle vibrazioni
Il problema consiste nello studio dei movimenti del meccanismo in un intorno della configurazione di
equilibrio. Consente la determinazione delle pulsazioni naturali e i modi del sistema. Il problema viene risolto
per mezzo della linearizzazione delle equazioni di moto degli elementi del sistema in un intorno della
configurazione di equilibrio. L'analisi è condotta quindi risolvendo un sistema di equazioni differenziali
lineari a coefficienti costanti.
Problema dinamico diretto (simulazione dinamica)
Viene calcolato il moto del sistema conoscendo le forze esterne che agiscono su di esso. Lo studio della
dinamica diretta è molto importante perché consente di prevedere il moto effettivo del sistema “reale” sotto
l'azione di forze note. La simulazione viene effettuata mediante l'integrazione di un sistema di equazioni
differenziali generalmente non lineare. Il problema è di solito complesso e pesante dal punto di vista
computazionale: particolare cura deve essere posta nella scelta del tipo di algoritmo per la risoluzione.
Problema dinamico inverso
Il problema dinamico inverso consiste nel determinare il sistema di forze e coppie in grado di far assumere al
sistema un moto assegnato. Per la soluzione è necessario conoscere le velocità e le accelerazioni di tutti gli
elementi, per calcolare le forze di inerzia che dovranno essere equilibrate dalle forze esterne e vincolari. La
soluzione della dinamica inversa consente di conoscere le forze e le coppie a cui è soggetto un sistema di cui è
noto il movimento e può essere utilizzato, ad esempio, per calcolare le azioni di controllo da applicare al
sistema per ottenere il moto desiderato.
PROBLEMI DINAMICI
Dal punto di vista dell’analisi del movimento umano le ossa possono essere, in prima
approssimazione, considerate come indeformabili.
In particolar modo le ossa lunghe degli arti superiori ed inferiori offrono dei
riferimenti sufficientemente precisi per lo studio di massima del movimento basato
sull’assunzione del moto relativo di segmenti rigidi. L’ipotesi di segmento rigido
permette di semplificare notevolmente l’analisi riducendo drasticamente il numero
di punti necessari: per conoscere la posizione di un corpo rigido nello spazio, infatti,
sono necessari 6 parametri (es. le coordinate di due punti).
Altre sezioni dell’apparato muscolo-scheletrico sono usualmente considerati come
segmenti rigidi seppure costituiti da gruppi di ossa dotate di un certo grado di
mobilità relativa (ad esempio il complesso metatarsale).
A seconda del livello di raffinatezza dell’analisi anche il tronco può essere
considerato come segmento rigido, nonostante la colonna vertebrale sia dotata, nel
suo complesso, di un grado di mobilità certamente non trascurabile.
PROBLEMI DINAMICI
La dinamica del movimento umano si basa dunque sull’analisi di un modello
costituito da un numero di segmenti con possibilità di moto relativo. La
segmentazione è la suddivisione dell’intero corpo in parti (segmenti) che possono, in
prima approssimazione, essere considerate rigide. Il movimento relativo tra i
segmenti dipende dalle caratteristiche delle articolazioni che interessano le strutture
ossee che competono ai segmenti stessi.
Dal punto di vista dinamico, il moto dei segmenti è il risultato delle azioni delle
forze e delle coppi agenti e dalle caratteristiche inerziali. Le forze e le coppie che
agiscono sul singolo elemento derivano sia dall’interazione del corpo con l’ambiente
esterno e sia dall’azione dei muscoli, che costituiscono gli “attuatori” del modello
meccanico.
Le caratteristiche inerziali sono principalmente le masse ed i momenti di inerzia dei
singoli segmenti.
Lo studio del problema dinamico diretto, consiste nello studio del moto dei segmenti
in funzione delle forze agenti (supposte note) e delle caratteristiche inerziali, e dei
vincoli (modello delle articolazioni).
Il problema dinamico inverso, viceversa, ha come oggetto la stima delle forze agenti
sul singolo segmento sulla base dell’analisi del movimento e delle caratteristiche
inerziali e dei vincoli.
In entrambi i casi la conoscenza delle caratteristiche di massa degli elementi in cui è
suddiviso il corpo è alla base dell’affidabilità del risultato.
PROBLEMI DINAMICI
Pertanto, la modellazione dinamica di sistemi meccanici si basa sulla valutazione dei
fenomeni fisici coinvolti e sulla conoscenza di grandezze proprie dei corpi che
costituiscono il sistema.
La geometria, il baricentro ed il momento di inerzia (per citarne solo alcuni, sono
proprietà fondamentali per la soluzione di un problema dinamico o la modellazione
di un sistema meccanico.
Quando si applicano le leggi della meccanica ai sistemi biologici nasce il problema
della valutazione di tali parametri. I sistemi biologici, incluso il sistema “corpo
umano” presentano, spesso, caratteristiche tali che difficilmente è possibile accettare
le drastiche semplificazioni che spesso sono assunte nell’approccio “classico” della
meccanica.
I sistemi biologici sono per loro natura non rigidi e non omogenei, la geometria e la
densità non sono costanti nel tempo.
Inoltre, le geometrie sono estremamente complesse oltre che variabili.
Oltre alle grandezze citate, la posizione delle articolazioni, dei punti di origine ed
inserzione dei muscoli, la collaborazione muscolare, etc. sono di fondamentale
importanza nell’ottica della modellazione della “macchina uomo”
La misura delle grandezze meccaniche (e non) del corpo umano e delle sue parti è
l’oggetto dell’ANTROPOMETRIA. Numerosi studi sono stati condotti in questa
direzione, e numerose sono ancora le questioni aperte.
ANTROPOMETRIA
Nello studio del corpo umano ci si avvale di modelli matematici del sistema
muscolo-scheletrico basati sulla meccanica dei corpi rigidi. Occorre attribuire ai
corpi rigidi dimensioni e caratteri inerziali il più fedeli possibile alle
corrispondenti caratteristiche dei segmenti corporei rappresentati
ANTROPOMETRY
• Studies the physical measurements
of the human body
• Used to study differences
between groups
•Race
•Age
•Sex
•Body Type
• Professional Fields: ergonomics,
automotive, etc.
• Mostly care about the inertial
properties of the body and its
segments
SEGMENTAZIONE
Per sviluppare un modello biomeccanico è fondamentale
dividere il corpo in una catena di segmenti di
caratteristiche inerziali note: questa operazione è detta,
appunto, segmentazione.
Gran parte dei dati relativi alle caratteristiche inerziali dei
segmenti derivano da misure effettuate su cadaveri.
La tecnica maggiormente adottata è la segmentazione in
corrispondenza degli assi articolari, procedura che non è
esente da complicazioni: l’asse articolare non sempre
corrisponde l’estremità del segmento (si prenda ad
esempio l’anca), talvolta non è fissa (es. il ginocchio) ed è
difficile da individuare.
Una tecnica alternativa consiste nella segmentazione in
base ai cosiddetti punti di repere anatomico e nella
successiva trasposizione dei dati in un sistema di
riferimento biomeccanico basato sugli assi articolari.
Si può precisare che quando un corpo è suddiviso in base
a dei riferimenti ossei, le sue parti si chiamano segmenti
corporei, mentre quandosi sfruttano dei riferimenti
articolari si chiamano anelli o collegamenti (link), in virtù
dell’analogia con una catena. Per definizione, i link sono le
linee longitudinali (rispetto al segmento) che uniscono due
punti articolari adiacenti. In base al modello utilizzato la
massa del link può essere immaginata distribuita per tutta
la lunghezza o concentrata nel suo centro di massa.
LUNGHEZZA
misura
anatomica
misura
biomeccanica
punti di repere anatomici
assi articolari
La dimensione, soprattutto la lunghezza, di un
segmento può essere diversa in base ai criteri di
segmentazione impiegati. La lunghezza del
braccio è misurata tra il punto laterale del
processo acromiale e l’estremità superiore della
testa prossimale del radio, in posizione eretta con
le braccia lungo i fianchi. Ma l’acromion è
qualche centimetro sopra il centro articolare della
spalla, quindi la misura del segmento corporeo è
maggiore di quella del link. Le due misure
vengono dette, rispettivamente, anatomica e
biomeccanica. Dempster(1955) ha stimato che la
lunghezza biomeccanica del braccio è circa l’89% della
sua lunghezza anatomica (lunghezza dell’omero). Le
due misurazioni si avvicinano nel caso in cui il gomito
sia piegato a 90°.
LUNGHEZZA DEI SEGMENTI CORPOREI
Parametrizzati in funzione dell’altezza
H [m]
altezza
testa
h_collo
h_spalle
h_gomito
h_polso
h_dita
h_anca
h_ginocchio
h_caviglia
h_???
spalla
omero
avanbraccio
mano
torso + testa
piede
L_spalle
L_torace
L_anche
L_piede
D_testemetatarsali-caviglia
1.83
1
0.13
0.936
0.87
0.818
0.63
0.377
0.53
0.285
0.039
0.72
0.129
0.186
0.146
0.108
0.52
0.152
0.259
0.174
0.191
0.055
0.008197
1.83
0.2379
1.71288
1.5921
1.49694
1.1529
0.68991
0.9699
0.52155
0.07137
1.3176
0.23607
0.34038
0.26718
0.19764
0.9516
0.27816
0.47397
0.31842
0.34953
0.10065
0.015
VOLUME
Metodi utilizzati:
1) basati sulla determinazione della spinta idrostatica
2) per immersione dei segmenti
3)basati sulla decomposizione del volume incognito in volumi
componenti piccoli e di agevole determinazione
VOLUME: metodo per determinazione della spinta idrostatica
La differenza tra le due letture sulla
bilancia, divisa per la densità del liquido
alla temperatura dell’esperimento fornisce
il volume del corpo misurato
Pa [N] : peso del corpo in aria
Pw [N] : lettura del dinamometro in condizioni di corpo immmerso nel liquido
T : temperatura del liquido
V=
Pa − Pw
ρ a (T)
VOLUME: metodo per immersione dei segmenti
Il metodo per immersione dei segmenti consente la stime dei volumi anche in
soggetti viventi.
Due possibilità:
• misura del volume di acqua
traboccato a causa
dell’immersione del segmento
esaminato in un recipiente
pieno d’acqua (poco preciso)
• il segmento viene inserito in
modo che il soggetto possa
stare fermo in un
recipiente di dimensioni e
sezione note, trasparente e
dotato di scala graduata.
VOLUME: metodo per immersione dei segmenti
L’accuratezza del
metodo consiste è legata
alla scelta delle
dimensioni dei recipienti
che dovranno essere
adeguati ai segmenti in
esame
VOLUME: metodo per immersione dei segmenti
VOLUME: metodo per decomposizione del volume
V : volume totale del segmento
Vi : volume della porzione i - esima (misurabile)
h : altezza della pozione i - esima (misurabile)
ri : raggio della sezione alla quota i - esima
V = ∑ Vi
i
Vi = π ⋅ ri ⋅ h
2
Vi
π ⋅h
2
s i = π ⋅ ri
ri =
Questo metodo consente di determinare non solo il volume complessivo del
segmento, ma anche la distribuzione del volume con la quota (ovvero lungo l’asse
del segmento stesso).
Dalla combinazione di questo dato con la stima della densità è possibile valutare la
posizione del baricentro lungo l’asse del segmento.
MASSA
La massa è la caratteristica di un corpo che misura l’inerzia alla traslazione.
Il corpo umano è composto da diversi tessuti che sono presenti in percentuali
differenti nei vari segmenti corporei. La densità dei tessuti varia fortemente: ad
esempio l’osso compatto(che ha una funzione di sostegno) ha una densità di circa
1.8 g/cm³, valore quasi doppio rispetto agli 0.94÷0.96 g/cm³ del tessuto adiposo; per
questo la densità non è una grandezza omogenea.
Mentre la percentuale di tessuto osseo e di organi interni (densità1.06 g/cm³, come
per il sangue) non ha grandi margini di variazione da soggetto a soggetto, ci può
essere molta differenza nella quantità di grasso e di muscoli (1.06÷1.08 g/cm³). Da
questo si evince che la densità diminuisce con l’aumento della massa muscolare.
In uomini giovani e sportivi la densità media totale è di circa 1.06 g/cm³, mentre in
pazienti sovrappeso può scendere fino a 1.01 g/cm³(Brozeke Keys, 1952); nelle
donne questo valore cala ancora, fino ad 1 g/cm³ per ragazze giovani (Rorked
Hellebrandt, 1937).
La densità dei segmenti diminuisce con l’avanzare dell’età così come diminuiscono
il tessuto osseo e muscolare, a favore del tessuto adiposo.
r
m = m ∫ ρ(r )dv
V
(parzialmente tratto da materiale didattico di Prof. Chiari, UniBo)
MASSA
La massa dei segmenti corporei può essere determinata in diversi modi:
• misura diretta per pesata
• calcolo del prodotto tra densità e volume
• metodo dell’equilibrio dei momenti
• metodo basato RMN (risonanza magnetica nucleare) e raggi X
(parzialmente tratto da materiale didattico di Prof. Chiari, UniBo)
MASSA
La massa dei segmenti corporei può essere
determinata in diversi modi:
• misura diretta per pesata
• calcolo del prodotto tra densità e volume
La misura diretta può essere effettuata su
reperti anatomici.
La maggior parte degli studi sono stati
effettuati su cadaveri di età e generi diversi.
I cadaveri, prima congelati, sono sezionati in
corrispondenza degli assi articolari.
Dal confronto tra la massa ed il volume è
possbile fare una stima della densità dei
segmenti. I segmenti degli arti inferiori e
superiori presentano densità superiori rispetto
alla densità dell’intero corpo. La densità
aumenta anche con l’età. Per le applicazioni che
non richiedono particolare precisione si può
ritenere, in prima approssimazione che la
densità sia costante per tutto il segmento.
MASSA
To visualize the mass distribution of the human body,
Harless (1858) constructed the model shown in Figure.
The linear dimensions of the links of the model are
proportional to the segment lengths; the volumes of the
spheres are proportional to segment masses. The centers
of the spheres indicate the location of mass centers
(centers of gravity) of the segments.
Modified models of the mass distribution of the human
body and mass center location of
the segments have been made by several other
investigators. It is unfortunate that up to now
a unified and universally accepted subdivision of the
human body into segments does not
exist (Drillis, Contini, 1964)
CARATERISTICHE DI VOLUME E DI MASSA DEI SEGMENTI
MASSA
• metodo dell’equilibrio dei momenti
Consiste nella misura della variazione
della reazione di appoggio ad un
estremo di una trave su cui giace il
corpo, in corrispondenza al
cambiamento della posizione del
segmento corporeo esaminato
M = massa totale del corpo
m = massa del segmento
S 0 = misura della cella di carico config. 0 (ϕ = 0°)
S1 = misura della cella di carico config. 1 (ϕ = 90°)
a 0 = posizione del baricento in config. 0
a1 = posizione del baricento in config. 1
config. 0
S0 ⋅ D = M ⋅ g ⋅ a 0
;
a0 =
S1 ⋅ D = M ⋅ g ⋅ a1
;
a1 =
S0 ⋅ D
M⋅g
S1 ⋅ D
M⋅g
M ⋅ g ⋅ a 0 = m ⋅ g ⋅ (b − d ) + (M - m ) ⋅ g ⋅ c
M ⋅ g ⋅ a1 = m ⋅ g ⋅ (b ) + (M - m ) ⋅ g ⋅ c
M ⋅ g ⋅ a1 − M ⋅ g ⋅ a 0 = S1 ⋅ D - S 0 ⋅ D = m ⋅ g ⋅ (b ) - m ⋅ g ⋅ (b − d )
m=
(S1 - S 0 ) ⋅ D
g
d
MASSA/BARICENTRO
Nota la posizione del centro di massa
del segmento (ad es. con le tecniche
descritte in precedenza), è possibile
effettuare una stima della massa del
segmento stesso da due letture della
cella di carico.
m=
(S1 - S0 ) ⋅ D
g
d
Per ulteriore controllo si possono
effettuare altre letture in
configurazioni intermedie (ad esempio
per diversi valori dell’angolo di
inclinazione del segmento.
It is assumed that in flexion the elbow ioint has only one
degree of freedom, i.e., it is uniaxial; hence the mass
L’angolo del segmento può essere
determination of forearm and hand is comparatively simple.
valutato per mezzo di una scala
The shoulder joint has several degrees of freedom and for
graduata, metodi ottici, goniometri,
each arm position the center of rotation changes its location
etc.
so that the successive loci describe a path of the
(S - S0 ) ⋅
m= 1
g
D
d ⋅ (1 - cosϕ )
instantaneous centers. If the displacement (e) of the
instantaneous center in the horizontal direction is known
from the Slick Diagram, the magnitude of the segment
(S - S 0 ) ⋅
D
mass will be
m= 1
g
d ⋅ (1 - cosϕ ) + e
MASSA/BARICENTRO
Accorgimenti per la valutazione della posizione del baricentro del corpo in pose particolari. I punti A, B e C
sono disposti in maniera tale da formare un triangolo equilatero. A e B sono strumentati.
• Filmato del gesto da analizzare.
• Proiezione del frame che rappresenta la postura di
interesse a grandezza reale
• Disegno della siluette della postura.
• Posizionamento del soggetto.
• Misura delle reazioni in A e B.
• Calcolo della posizione del baricentro nel sistema
di riferimento ABC
y
x
A
B
G
x=
(R B1 − R B0 ) ⋅ h
m ⋅g
Hay, J. “The biomechanics of sport techniques – 4° ed.”, Prentice-Hall, 1993
(
R A1 − R A0 ) ⋅ h
y=
m ⋅g
C
R A0 , R B0 = reazioni ai punti A e B relative al peso della sola pedana
R A1, R B1 = reazioni ai punti A e B relative al contributo pedana + misurando
m = massa del misurando
x, y =" coordinate" del baricentro
MASSA
Metodo basato RMN e raggi X
• Le immagini fornite dalla RMN forniscono informazioni
sulle coordinate dei punti
• le immagini ottenute mediante RX forniscono informazioni
sul tipo di tessuto
La procedura consiste in:
• suddividere il segmento in parti caratterizzate da diversi tipi
di tessuto (osso, grasso, cute, etc.)
• ognuna di queste parti viene suddivisa in un numero finito
di elementi a formare un reticolo ad ognuno dei quali viene
associato una posizione ri nel sistema di riferimento
considerato, ed un valore di densità mi
• Si procede quindi al calcolo della massa M e della posizione
rG centro di massa
r
rG =
r
∑ (m i ⋅ ri )
M
BARICENTRO DEI SEGMENTI
Misure in vitro
• Le misure sono condotte sui reperi anatomici
ricavati da cadaveri. I metodi di misura sono basati
sull’equilibrio statico o sul sezionamento.
Misure in vivo
• suddivisione del segmento in sezioni approssimate
di volume noto con il metodo ad immersione
progressiva. Necessita di una stima preliminare della
densità media.
• Metodo basato RMN e raggi X (già descritti)
• Metodi ottici: le moderne tecnologie impiegate per la
realizzazione di scanner 3D consentono la stima della
forma del segmento. Insieme alle informazioni sulla
distribuzione della densità (o della densità media)
consentono la determinazione della posizione del
baricentro.
BARICENTRO DEL CORPO
• La misura della posizione del baricentro
sull’asse longitudinale facilmente dalle
relazioni di equilibrio statico, come visto in
precedenza.
• analogamente è possibile stimare la
posizione della posizione del baricentro
lungo i piani frontale e trasversale.
BARICENTRO DEL CORPO
Nella postura eretta, in condizioni statiche, la proiezione del baricentro al piano del
terreno si trova, normalmente, in posizione mediale, tra i due piedi.
Come noto, la postura eretta è una configurazione di equilibrio instabile: è
necessario un continuo intervento del sistema neuro-muscolare per apportare le
continue correzioni per mantenere il baricentro del corpo all’interno della superficie
di appoggio, che si esplicano in una continua modifica delle forze scambiate dal
corpo con il terreno.
Per effetto di tali correzioni, sia il centro di pressione (ovvero il punto in cui è
applicata la forza di reazione tra piede e terreno) che la proiezione del baricentro sul
piano di appoggio non sono stazionarie, ma compiono un certo percorso sul piano
di appoggio. I due punti non sono coincidenti, seppure correlati dalla dinamica del
moto.
Le caratteristiche di moto del centro di pressione sul piano è un importante indice
delle capacità di equilibrio della persona.
Tali caratteristiche possono essere derivate dall’analisi delle misure delle reazioni al
terreno nel tempo.
I due metodi oggi più largamente utilizzati per la misura delle reazioni al terreno
sono le piattaforme di forza e le pedane baropodometriche.
PIATTAFORME DI FORZA
Piattaforma di forza:
È uno strumento impiegato per la misura
delle reazioni al terreno. È dotato di un
numero di trasduttori di forza (in genere 4)
ad estensimetri a resistenza o
piezoelettrici. Consente di misurare la
reazione totale al terreno: le tre
componenti della forza (Fz, Fx ed Fy) ed il
momento lungo la verticale Mz.
Dall’elaborazione del segnale si ottengono
le posizioni Px e Py del centro di pressione
nel sistema di riferimento della
piattaforma, in funzione del tempo.
Le misure sono dinamiche, con frequenza
di acquisizione dell’ordine del kHz.
Dall’analisi temporale del dati è possibile
stimare l’andamento del centro di
pressione nel tempo.
PEDANE BAROPODOMETRICHE
La pedana baropodometrica è uno
strumento atto alla valutazione della
distribuzione della reazione al terreno. È
costituito da una matrice di sensori di
forza (in genere piezoelettrici o capacitivi)
distribuiti uniformemente sulla superficie
attiva della pedana. Attualmente la
dimensione del singolo sensore varia tra 4
e 10mm2. L’elevato numero di sensori
(monitorati contemporaneamente con
frequenza dell’ordine dei 100Hz) consente
la rappresentazione della morfologia
dell’interazione piede-terreno
(distribuzione delle pressioni).
Tuttavia, la struttura dei sensori consente
la sola misura delle forze in direzione Z. La
posizione del centro di pressione è data dal
calcolo del baricentro delle pressioni
plantari.
MOMENTI DI INERZIA
Per descrivere le proprietà inerziali di un corpo rigido pesante
occorre definire l’ellissoide d’inerzia in un riferimento prefissato;
ciò richiede in genere la misura di sei parametri, che si riducono a
tre quando ci si ponga in un riferimento principale.
Negli studi di biodinamica è necessaria quindi la conoscenza
completa delle proprietà inerziali del corpo e dei segmenti che lo
costituiscono (dummy, modelli matematici,…)
Si usano i seguenti metodi di misura:
•pendolo composto
•pendolo torsionale
•quick release
•oscillazioni rilassate fotogrammetria
MOMENTI DI INERZIA
Il pendolo semplice è l'idealizzazione del
pendolo fisico, costituito da un corpo
rigido vincolato ad un punto di
sospensione O tramite una cerniera.
Siano M la massa del corpo rigido, I il
momento d'inerzia rispetto al centro
di rotazione O e d la distanza tra il centro
di massa cm ed il centro di
rotazione O. Con procedimento analogo a
quello impiegato per la trattazione del
pendolo semplice, si trova che il periodo di
oscillazione T del pendolo fisico è pari a
T=
IO
2π
= 2π ⋅
ω
M⋅d ⋅g
M = massa del pendolo
I O = momento di inerzia rispetto al centro di rotazione O
d = distanza tra il centro di rotazione O ed il baricentro C m
MOMENTI DI INERZIA
Pendolo fisico:
Il pendolo è costituito dal segmento (ottenuto dal
sezionamento di un cadavere o una sua replica) in
esame, posto in rotazione intorno all’asse rispetto al
quale si vuole calcolare il momento di inerzia.
Dalla misura della massa e dal periodo di oscillazione è
possibile ottenere una stima del momento di inerzia
intorno all’asse di rotazione
T=
IO
2π
= 2π ⋅
ω
M⋅d ⋅g
Le incognite generalmente sono due: momento di
inerzia e posizione del baricentro.
Si possono risolvere due equazioni relative alle
oscillazione dello stesso corpo rispetto a due assi
paralleli a distanza nota. Oppure relative una alla
pendolazione del corpo e l’altra alla pendolazione del
corpo più un altro elemento di momento noto
MOMENTI DI INERZIA
Pendolo di torsione: è costituito da una piattaforma vincolata ad una barra di
torsione, come illustrato in figura. La rigidezza della barra di torsione, la massa ed
il momento di inerzia della piattaforma sono note con precisione. Il periodo di
oscillazione del pendolo dipende dal momento di inerzia della piattaforma e del
corpo posto sopra di essa.
− Kϑ + Iϑ&& = 0
T=
2π
I
= 2π ⋅
ω
k
2
T
I0 = 0 2 ⋅ k
4π
2
T1
I1 =
⋅k
2
4π
I = I1 − I 0
MOMENTI DI INERZIA
MOMENTI DI INERZIA
Quick release: permette di calcolare il
momento di inerzia di un segmento
corporeo appartenente agli arti, in vivo,
partendo dai valori iniziali della coppia
muscolare quando non è più compensata da
una opportuna coppia esterna.
Quando viene tagliato il cavetto, la velocità
angolare del segmento è nulla e possono
ritenersi nulle le variazioni dello stato dei
muscoli interessati. In tale istante il valore
dell’accelerazione è proporzionale, tramite
il momento d’inerzia cercato, al simultaneo
valore della coppia muscolare
M 0 − I 0ϑ&& = 0
MOMENTI DI INERZIA
Oscillazioni rilassate
Consiste nel misurare la risposta del segmento esaminato ad una
sollecitazione sinusoidale.
• Si sollecita l’arto con una coppia opportunamente applicata.
• Si misura l’accelerazione angolare dell’arto, nel suo movimento
intorno all’articolazione prossimale.
Al soggetto si chiede di mantenere il più possibile rilassati i
muscoli interessati dal movimento studiato (verifica tramite
EMG)
La relazione tra la coppia applicata e l’accelerazione angolare
permette la stima del momento di inerzia dell’arto.
MOMENTI DI INERZIA
Oscillazioni rilassate
Consiste nel misurare la risposta del segmento esaminato ad una
sollecitazione sinusoidale.
• Si sollecita l’arto con una coppia opportunamente applicata.
• Si misura l’accelerazione angolare dell’arto, nel suo movimento
intorno all’articolazione prossimale.
Al soggetto si chiede di mantenere il più possibile rilassati i
muscoli interessati dal movimento studiato (verifica tramite
EMG)
La relazione tra la coppia applicata e l’accelerazione angolare
permette la stima del momento di inerzia dell’arto.
MOMENTI DI INERZIA
La stima del momento di inerzia dei segmenti può essere fatta
anche sfruttando i della misura ad immersione parziale, sebbene
sia affetta da errore non trascurabile.
Ciascun volume parziale può essere assimilato ad un cilindro, di
cui è possibile stimare il raggio e lo spessore.
La somma dei momenti di inerzia di tutti cilindri introno all’asse
dell’articolazione fornisce la stima del momenti di inerzia
complessivo.
Analogamente a quanto accennato riguardo alla valutazione della massa e del
baricentro, i metodi basati su RMN e raggi X possono, ovviamente, essere sfruttati
per la stima del momento di inerzia, come risultato della sommatoria del contributo
di ciascun elemento di massa in cui è discretizzabile il corpo.
r r 2
I s = ∑ m i ⋅ u ∧ ri
i