Appunti di Comunicazioni Elettriche
Capitolo 10 - Parte III
Demodulatori di ampiezza non coerenti
Introduzione ............................................................................................... 1
Demodulatore a valor medio....................................................................... 3
Implementazione circuitale ................................................................... 6
Problemi legati alla non idealità dei diodi ....................................... 8
Demodulatore ad inviluppo ...................................................................... 13
Principio di funzionamento ................................................................. 13
Istante di spegnimento del diodo ................................................... 15
Influenza di C sulla tensione di uscita ........................................... 16
Effetto di demodulazione AM-standard e dimensionamento del circuito18
Relazione tra tensione di uscita e tensione di ingresso (non sinusoidale)20
demodulatore ad inviluppo come demodulatore coerente.......................... 23
Estrazione dell’inviluppo negativo ........................................................... 25
INTRODUZIONE
Come già sappiamo, la demodulazione di ampiezza può essere sia di tipo coerente sia non
coerente. La demodulazione di tipo coerente avviene moltiplicando il segnale modulato per una
oscillazione sincrona (nei limiti del fattibile) in fase e in frequenza con la portante modulata in
trasmissione, per cui è una operazione che richiede nuovamente l’uso di un moltiplicatore: avendo
già descritto funzionamento e caratteristiche dei moltiplicatori, in questi paragrafi ci occupiamo solo
della demodulazione di ampiezza di tipo non coerente.
I demodulatori di ampiezza non coerenti hanno una notevole importanza, dato che hanno
un basso costo (il che li rende appetibili da parte degli utenti finali dei sistemi di comunicazione) e
sono utilizzabili in svariate applicazioni.
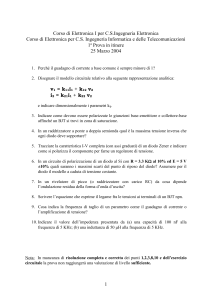
Nella figura seguente è evidenziata la differenza tra una modulazione d’ampiezza DSB-SC ed una
modulazione AM standard:
Appunti di “Comunicazioni Elettriche” - Capitolo 10 (parte III)
In entrambi i casi, è stato utilizzato lo stesso segnale modulante (una sinusoide) e la stessa
portante (ovviamente anch’essa sinusoidale, a frequenza maggiore del segnale modulante): come si
nota, la differenza tra i due segnali modulati è essenzialmente nel fatto che il segnale modulato AMstandard non presenta inversione di fase in corrispondenza degli attraversamenti per lo zero1 del
segnale modulante, al contrario del segnale modulato in DSB-SC.
Allora, in linea del tutto generale, possiamo così riassumere la caratteristica peculiare di un
demodulatore di ampiezza non coerente: esso riceve in ingresso una
sinusoide, la cui ampiezza varia senza che cambi la fase, e fornisce
in uscita una tensione proporzionale all’inviluppo dell’ingresso:
Dobbiamo allora chiederci come è possibile estrarre, da un segnale in ingresso come quello della
figura, l’informazione relativa all’inviluppo. Possiamo cominciare a ragionare nel dominio della
frequenza, ricordando che lo spettro di un segnale modulato AM standard è fatto nel modo seguente:
segnale
modulato
segnale
modulante
f
f
Si tratta cioè del classico spettro di un segnale DSB-SC, cui però è aggiunta una riga alla
frequenza della portante2.
E’ evidente che non possiamo certo pensare di prendere il segnale modulato e mandarlo in
ingresso ad un filtro passa-basso: dato che il segnale modulato non presenta componenti in bassa
frequenza, non otterremmo assolutamente niente.
Possiamo spiegarci questo fatto anche nel dominio del tempo: infatti, dire che un filtro lascia
passare solo le basse frequenze, ossia le componenti lentamente variabili, significa dire che esso
effettua la media (temporale) del segnale in ingresso su un intervallo di tempo lungo (tanto più lungo
1
Ricordiamo che, nella demodulazione coerente, quello che consente di stabilire, in fase di ricostruzione, se il segnale modulante
diventa negativo o rimane positivo, in corrispondenza degli attraversamenti dello zero da parte del segnale modulato, è proprio
l’inversione di fase del segnale modulato: confrontando, infatti, la fase del segnale modulato con la fase dell’oscillazione locale,
si deduce, in corrispondenza delle variazioni della prima rispetto alla seconda, il cambiamento di segno da parte del segnale
modulante.
2
A questo proposito, ricordiamo che esiste un motivo ben preciso per cui la riga della portante ha una ampiezza AP maggiore
rispetto alle altre armoniche: il motivo, ricordando l’espressione s t ( t ) = A P + s( t ) cos ω P t di un generico segnale
modulato AM standard, è che l’inverso di AP deve essere sufficientemente basso per garantire che la portante modulata non cambi
mai segno. In particolare, AP deve essere maggiore o uguale al valore assoluto del massimo valore negativo assumibile da s(t)
(segnale modulante)
Autore: Sandro Petrizzelli
(
2
)
(
)
Demodulatori di ampiezza non coerenti
quanto più stretta è la banda del filtro); dato che il segnale in ingresso assume valori positivi e
negativi approssimativamente simmetrici, la media temporale risulta praticamente nulla, per cui
l’uscita è praticamente nulla.
Si capisce allora che dobbiamo operare sul segnale modulato in modo almeno da ricavare, da esso,
un termine in banda base che sia proporzionale al segnale modulante; una volta ottenuto questo
termine, solo allora potremo filtrare passa-basso e ottenere ciò che ci serve.
DEMODULATORE A VALOR MEDIO
Ricordiamo rapidamente quanto detto a proposito di un modulatore AM singolarmente bilanciato,
come per esempio un circuito chopper: si tratta di un circuito che presenta, oltre al segnale modulato
DSB-SC, anche una replica, in banda base, del segnale modulante, oltre poi eventualmente ad altre
repliche centrate sulle armoniche della frequenza della portante:
Uno spettro di questo tipo si ottiene, in pratica, moltiplicando il segnale modulante per una forma
d’onda rettangolare (la cosiddetta funzione di commutazione). L’andamento del segnale modulato è
del tipo seguente:
Considerando che la frequenza di chopper (cioè la frequenza ω0 della prima armonica
dell’onda quadra) è molto più alta della massima frequenza contenuta nel segnale, possiamo
trascurare le variazioni del segnale e considerare rettangoli, invece che trapezi, le forme d’onda
ottenute. Con questa approssimazione, ciò che otteniamo in uscita dal circuito è un treno di
rettangoli la cui ampiezza non è però costante, ma è modulata dal segnale modulante s(t).
Una forma d’onda simile a quella appena rappresentata si può anche ottenere in un altro modo e,
precisamente, eliminando le semionde negative della portante modulata:
3
Autore: Sandro Petrizzelli
Appunti di “Comunicazioni Elettriche” - Capitolo 10 (parte III)
Si osserva che il risultato ottenuto con il taglio è un segnale interpretabile come il prodotto del
segnale modulante s(t) per una “mezza sinusoide”, ossia una sinusoide privata delle semionde
negative. Questa “mezza sinusoide” è chiaramente un segnale periodico, di periodo TP=1/fP pari a
quello della sinusoide completa: allora, il suo spettro è una successione di infiniti impulsi distanziati
(in frequenza) di fP uno dall’altro. Quando moltiplichiamo questa “mezza sinusoide” per il segnale
modulante, otteniamo la convoluzione degli spettri, il che significa che lo spettro del segnale
modulante va a porsi a cavallo dei vari impulsi, incluso ovviamente quello a frequenza nulla.
Abbiamo perciò ottenuto il termine in banda base (cioè il segnale modulante) che ci interessava. A
questo punto, per isolare questo termine ci basta effettuare un filtraggio passa-basso, cioè una media
a breve periodo. Nel dominio del tempo, otteniamo quanto segue:
Un demodulatore che effettua le due operazioni (raddrizzamento e filtraggio passa-basso) appena
descritte prende il nome di demodulatore a valor medio.
Questo demodulatore funziona bene solo se il segnale modulante s(t) non cambia segno: infatti, in
caso contrario, cambia anche la fase della portante ed il valor medio non segue più il segnale
modulante.
Naturalmente, anziché tagliare le semionde negative della portante modulata (raddrizzamento a
singola semionda), possiamo anche ribaltarle (raddrizzamento a doppia semionda), ottenendo ancora
i risultati desiderati:
Questa è dunque la descrizione del funzionamento teorico di un demodulatore a valor medio.
Vediamo l’implementazione concreta.
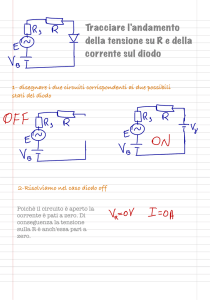
Dobbiamo realizzare un circuito che raddrizzi (a singola o a doppia semionda) il segnale in
ingresso e poi effettui, sul segnale raddrizzato, un filtraggio passa-basso. Per quanto riguarda il
raddrizzamento, se scegliamo un raddrizzamento a singola semionda sappiamo bene che possiamo
usare un semplice circuito del tipo seguente:
Autore: Sandro Petrizzelli
4
Demodulatori di ampiezza non coerenti
Il diodo si mantiene spento fin quando la tensione e(t) è inferiore alla sua tensione di accensione:
in questa situazione, non c’è corrente nella maglia e la tensione di uscita è uguale ad e(t); quando e(t)
supera la tensione Vγ, il diodo si accende, per cui la tensione di uscita è praticamente nulla e la
corrente nella maglia è i e ( t ) ≅ e( t ) / R , se trascuriamo la resistenza di conduzione e la tensione del
diodo.
Si deduce, allora, che la corrente nella maglia rappresenta il segnale modulato raddrizzato a
singola semionda (mentre la tensione ai capi del diodo rappresenta il segnale con le semionde
positive eliminate). Di conseguenza, il successivo filtraggio passa-basso dovrà avvenire sulla
corrente ie(t).
Ci serve allora un generatore pilotato che mandi tale corrente in ingresso ad un filtro passa-basso,
che può semplicemente essere un circuito RC parallelo opportunamente accordato. Il circuito
completo sarà dunque il seguente:
La parte sinistra è il raddrizzatore, mentre quella destra è il filtro.
Facciamo qualche passaggio analitico. Intanto, possiamo esprimere il segnale modulato nella
forma
e( t ) = A(1 + ks( t ) )cos(ω0 t )
dove k=1/A e dove s(t) è il segnale modulante.
Quando e(t) è positivo, esso impone una corrente ie(t) positiva per il diodo, che quindi la lascia
passare. Tale corrente, proporzionale al segnale raddrizzato, viene poi inviata, da un generatore
pilotato, ad alimentare il filtro RC passa-basso: si tratta di un filtro con un polo a frequenza
1/RC, essendo tale polo relativo all’impedenza del filtro stesso, ossia al rapporto tra la tensione ai
capi del filtro e la corrente in ingresso3.
Si tratta allora di dimensionare il polo del filtro: dato che la corrente ie(t) ha uno spettro con un
termine proporzionale allo spettro del segnale modulante, il filtro deve lasciar passare invariato solo
tale termine e deve azzerare tutto ciò che c’è al di sopra della massima frequenza del segnale
modulante.
Bisogna allora considerare che il filtro, avendo 1 solo polo, ha una funzione di trasferimento del
tipo seguente:
3
Stiamo cioè considerando una funzione di trasferimento che è il rapporto tra una tensione e una corrente e non tra due tensioni o
tra due correnti
5
Autore: Sandro Petrizzelli
Appunti di “Comunicazioni Elettriche” - Capitolo 10 (parte III)
f0
fH=1/R0C0
f
-20 dB/dec
La funzione di trasferimento decresce di 20 dB/decade a partire dalla frequenza 1/R0C0 del polo.
E’ necessario dunque, se si vuole isolare solo il termine in banda
base, che il segnale modulato abbia la giusta distanza (qualche
decade) dalla frequenza massima del segnale modulante.
Facciamo un esempio concreto: nella diffusione radiofonica AM, la banda del segnale
modulante è di 4.5 kHz, per cui si richiede che la portante da demodulare si trovi ad una frequenza
di due decadi superiore, vale a dire a frequenza f0=450 kHz.
Implementazione circuitale
Tornando adesso al circuito, è evidente che si tratta ancora di uno schema di principio, data la
presenza del generatore pilotato. Nella realtà, il circuito può essere implementato tramite uno stadio
a base comune avente come carico il filtro RC: la giunzione base-emettitore del transistor
corrisponde al diodo del circuito di prima, ossia serve al raddrizzamento; fin quando la tensione di
ingresso e(t) è positiva, la giunzione B-E risulta polarizzata direttamente, altrimenti lo è
inversamente; quando la polarizzazione è diretta, bisogna fare in modo che la corrente nella maglia
di ingresso, cioè la corrente di emettitore, vada a pilotare il filtro RC posto sul collettore, ossia
bisogna fare in modo che la corrente di collettore segua quella di emettitore: questo è possibile se il
transistor è in zona attiva diretta, in quanto, in questa condizione di funzionamento, lo stadio si
comporta appunto come inseguitore della corrente di emettitore. Di conseguenza, bisogna garantire
che la giunzione B-C sia perennemente polarizzata in inversa.
Quindi, fin quando la giunzione B-C è polarizzata inversamente, la corrente di collettore iC(t) è
pari a quella di emettitore moltiplicata per il guadagno αF , per cui corrisponde al segnale modulato
dopo il raddrizzamento. Tale corrente iC(t) fa da segnale di ingresso per il filtro RC, il quale ha
semplicemente il compito di lasciar passare solo i termini in banda base (cioè la banda del segnale
modulante. La risposta del filtro, intesa in questo caso come la tensione ai suoi capi, può essere vista
come la convoluzione della risposta all’impulso del filtro stesso per iC(t), cioè il segnale di ingresso:
v out ( t ) = i C ( t ) * h ( t )
Per quanto riguarda l’espressione della iC(t), possiamo far riferimento solo alle componenti in
banda base, che sono le uniche di nostro interesse, per cui possiamo scrivere che
i C ( t ) = αi E ( t ) =
α1
A(1 + ks( t ) )
Rπ
dove il fattore 1/π tiene conto del fatto che la componente in banda base della corrente di emettitore
è scalata di un fattore π.
Autore: Sandro Petrizzelli
6
Demodulatori di ampiezza non coerenti
Sostituendo nell’espressione della tensione di uscita, abbiamo dunque che
v out ( t ) = i C ( t ) * h ( t ) =
α1
A(1 + ks( t ) ) * h ( t )
Rπ
A questo punto, un corretto dimensionamento del filtro RC è tale che la banda del segnale da
tirare fuori si trovi interamente contenuta nel tratto della funzione di trasferimento H(f) in cui |H(f)|
risulta costante: questo significa che, in tale banda, possiamo approssimare4 la risposta all’impulso
come h ( t ) ≅ R 0 δ( t ) , per cui abbiamo che
v out ( t ) ≅
α1
α1
A(1 + ks( t ) )* R 0 δ( t ) =
A(1 + ks( t ) )R 0
Rπ
Rπ
Tutto questo discorso presuppone ovviamente che le giunzioni B-C e B-E siano ideali, il che nella
realtà non accade e pone quindi dei problemi. Tali problemi saranno esaminati più avanti.
Vediamo ora di capire come garantire che lo stadio a base-comune rispetti i requisiti elencati poco
fa.
In primo luogo, abbiamo detto che dobbiamo garantire la polarizzazione inversa della giunzione
B-C. Un modo intuitivo di procedere è quello di inserire nella maglia di collettore una batteria Vinv,
la cui polarità sia tale da garantire la polarizzazione inversa desiderata:
Il problema di questo schema è, però, che il segnale di uscita, prelevato sul collettore, non è più
riferito a massa ed ha sovrapposta una tensione continua di polarizzazione. Dato che, invece, è
conveniente riferire il segnale di uscita a massa, ci basta semplicemente spostare la posizione della
batteria nel modo seguente:
4
Ricordiamo una nota proprietà della trasformata di Fourier in base alla quale l’antitrasformata di una costante è pari all’impulso di
Dirac. Vale anche il viceversa, per dualità: la trasformata di una forma d’onda costante è pari ad un impulso δ(f) centrato a
frequenza 0.
7
Autore: Sandro Petrizzelli
Appunti di “Comunicazioni Elettriche” - Capitolo 10 (parte III)
Così facendo, la batteria è rimasta, con la giusta polarità, nella maglia di collettore, ma l’uscita è
adesso riferita a massa.
D’altra parte, con questo passaggio abbiamo inserito una tensione continua nella maglia di
ingresso e questo compromette il funzionamento del raddrizzatore. Non solo, ma una componente
continua di polarizzazione è comunque presente, nella maglia di ingresso, per un’altra ragione: il
generatore di tensione di ingresso, che alimenterà il nostro circuito, sarà sempre l’ultimo stadio di
una catena di amplificazione a media frequenza; ciò significa che al segnale da demodulare
troveremo sempre sovrapposta una tensione continua dovuta alla
polarizzazione di tale stadio.
Per eliminare, dunque, la componente continua del segnale di ingresso, ci basta considerare che il
segnale da demodulare è un segnale passa-banda a valor medio nullo: di conseguenza, se usiamo un
condensatore di blocco come quello indicato nell’ultima figura, esso impedirà il passaggio del
continua, mentre lascerà passare inalterato il segnale da demodulare.
Da notare che il segnale forzante e(t), per le considerazioni fatte, è la somma del segnale da
demodulare e della tensione continua dello stadio precedente. A rigore, quindi, esso non coincide con
il segnale e(t) considerato prima.
D’altra parte, la funzione del condensatore di blocco Cb è proprio quella di fare il modo che la
tensione che polarizza la giunzione B-E sia solo quella del segnale da demodulare.
Ci sono però problemi legati proprio al funzionamento del condensatore Cb: il raddrizzatore fa
circolare corrente, nella maglia di ingresso, solo in un senso (quello che va dalla base verso
l’emettitore), per cui il valor medio di tale corrente sarebbe positivo; questo, però, richiederebbe una
tensione sul condensatore che cresca indefinitamente, il che è ovviamente impossibile. Di
conseguenza, la corrente nella maglia non può che essere nulla, dato che il condensatore aumenta la
propria tensione fino a bilanciare tutte le forze elettromotrici presenti nella maglia stessa. Quindi, la
presenza del condensatore porterebbe a 0 la corrente nella maglia, il che significa che l’azione di tutti
gli altri generatori è quella di portare la giunzione B-E al limite dell’accensione: questo è un
comportamento di tipo clamping.
Problemi legati alla non idealità dei diodi
I discorsi fatti poco fa indicano che il circuito si comporta nel modo
desiderato solo a patto di ritenere ideali i due diodi, dove questa
idealità viene essenzialmente da due ipotesi: in primo luogo, dal ritenere che il diodo in conduzione
sia un cortocircuito, ossia abbia una tensione nulla ai suoi capi e non presenti resistenza di
conduzione; in secondo luogo, dal fatto di ritenere che il diodo abbia Vγ=0, ossia che esso vada in
conduzione non appena la tensione ai suoi capi supera lo 0.
I
Vγ
Autore: Sandro Petrizzelli
8
Va
Demodulatori di ampiezza non coerenti
Per quanto riguarda la resistenza di conduzione, essa non dà problemi, in quanto la possiamo
inglobare nella resistenza in serie al diodo stesso. Più problemi possono venire invece dalla tensione
di soglia Vγ. Vediamo perché.
La presenza di questa tensione di soglia indica il semplice fatto che il diodo va a condurre solo
quando la tensione ai suoi capi supera tale soglia. Di conseguenza, la corrente nel diodo non è più
solo proporzionale al segnale da demodulare, ma differisce da esso proprio a causa del fatto che la
conduzione del diodo non parte istantaneamente quando il segnale modulato supera lo 0, ma parte un
certo tempo dopo, così come non cessa quando il segnale modulato scende sotto lo 0, ma un certo
tempo prima.
La figura seguente chiarisce bene il concetto appena esposto:
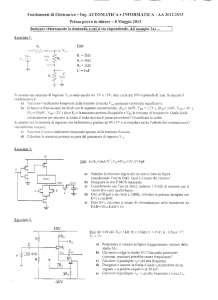
Viene qui riportato l’andamento della tensione forzante (supposta per comodità sinusoidale)
confrontato con l’andamento della corrente nel diodo (quest’ultima è stata però moltiplicata per un
fattore di scala >1 in modo da poter meglio confrontare i due andamenti temporali). Si è usata una
tensione di ampiezza 1V, cioè perfettamente confrontabile con la tensione di accensione di un diodo
reale. Questo comporta, come si vede, una fortissima distorsione della corrente rispetto alla tensione,
proprio perché il diodo viene portato in conduzione, durante le semionde positive della tensione
forzante, per intervalli di tempo molto brevi.
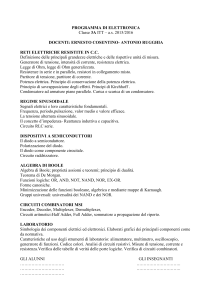
Se invece consideriamo una tensione forzante di ampiezza 10V, molto maggiore della tensione di
accensione del diodo, il risultato è il seguente:
In questo caso la distorsione permane, ma è molto minore rispetto al caso precedente: il diodo
conduce per una frazione estremamente elevata dell’intervallo di tempo corrispondente alle
semionde positive, mentre prima questa frazione era molto più piccola.
Aumentando ulteriormente l’ampiezza della tensione forzante, la distorsione è sempre più
trascurabile. Concludiamo, allora, che il circuito in esame approssima tanto
meglio un demodulatore a valor medio quanto più l’ampiezza della
9
Autore: Sandro Petrizzelli
Appunti di “Comunicazioni Elettriche” - Capitolo 10 (parte III)
tensione da demodulare supera la soglia di accensione del diodo:
indicata perciò con V1(t) l’ampiezza istantanea (funzione del segnale modulante) del segnale
modulato, deve risultare V1(t)>>Vγ per ∀t.
Questo fatto comporta una conseguenza fondamentale. Consideriamo l’espressione generale di un
segnale modulato AM standard:
s( t )
cos(ω P t )
s t ( t ) = A P cos(ω P t ) + s( t ) cos(ω P t ) = A P 1 +
A P
In base a questa espressione, l’indice di modulazione è la quantità
m=
s( t ) max
AP
Se l’indice di modulazione è unitario, ossia s( t ) max = A P ,l’ampiezza del segnale modulato scende
a 0 quando s(t) raggiunge il suo valore massimo negativo, per cui la condizione V1(t)>>Vγ non è più
soddisfatta:
s( t )
=0
V1 ( t ) = A P 1 +
A P
quando s(t) = − s( t ) max
Deduciamo che, in questo caso, il funzionamento del circuito è quello di un demodulatore a valor
medio solo in corrispondenza dei picchi positivi del segnale modulante s(t), mentre, in
corrispondenza dei picchi negativi, la distorsione introdotta è notevole5.
Nel caso in cui il segnale da demodulare (per esempio ricevuto da una antenna), non soddisfi alla
condizione V1(t)>>Vγ, l’unica possibilità diventa quella di amplificare il segnale stesso prima di
demodulare. Ci serviamo anche qui di una simulazione con P-Spice.
Consideriamo, come primo caso, quello di un singolo tono modulante di ampiezza 3V:
s( t ) = 3 cos(ωS t ) . Usiamo quindi questo segnale per modulare d’ampiezza, in AM standard, una
portante A P cos(ω P t ) . La condizione da rispettare, per effettuare la demodulazione non coerente, è
s( t )
che risulti 1 +
≥ 0 per ∀t. Se prendiamo un indice di modulazione unitario, ossia AP=|s(t)|max=3,
AP
il segnale modulato assume l’espressione
s( t )
s t ( t ) = 31 +
cos(ω P t )
3
ed il suo andamento temporale risulta essere il seguente:
5
E’ importante sottolineare che, in questo discorso, facciamo riferimento ai picchi del segnale MODULANTE e non a quelli del
segnale MODULATO.
Autore: Sandro Petrizzelli
10
Demodulatori di ampiezza non coerenti
Come si vede (e come indicano le formule), il segnale modulato vale 0 in corrispondenza dei
picchi negativi della sinusoide modulante s(t). Di conseguenza, in tali istanti la condizione
V1(t)>>Vγ non è verificata, per cui la demodulazione a valor medio presenterà distorsione in
corrispondenza di tali istanti, visto che il diodo non riesce a condurre. L’andamento temporale della
corrente nel diodo (che poi dovrebbe alimentare il filtro passa-basso finale) risulta essere il seguente:
Si nota immediatamente che le semionde negative del segnale modulante praticamente vengono
eliminate.
Adesso consideriamo un indice di modulazione minore, ossia scegliamo un valore maggiore
dell’ampiezza AP della portante. Prendendo ad esempio AP=7, il segnale modulato risulta essere il
seguente (sempre confrontato con il segnale modulante):
11
Autore: Sandro Petrizzelli
Appunti di “Comunicazioni Elettriche” - Capitolo 10 (parte III)
Si nota, in questo caso, che il valore minimo dei picchi positivi del segnale modulato, ossia il
valore minimo di V1(t), è ben al di sopra dello 0 ed anche ben al di sopra della tensione di accensione
del diodo. Ci aspettiamo perciò una minore distorsione sulla corrente nel diodo, come confermato
dalla simulazione, che riporta il seguente andamento temporale per tale corrente:
I picchi della corrente seguono molto meglio l’andamento del segnale modulante, per cui la
successiva ricostruzione, tramite il filtro passa-basso, è molto più fedele che non nel caso
precedente.
Torniamo adesso proprio al caso precedente e vediamo come cambiano le cose se, prima di
demodulare, amplifichiamo il segnale. Amplificare il segnale significa usare, come segnale da
demodulare, un segnale nella forma
s( t )
cos(ω P t )
s t ( t ) = GA P 1 +
A
P
dove G è il guadagno dell’amplificatore utilizzato. Di conseguenza, l’ampiezza istantanea del
segnale da demodulare è
s( t )
V1 ( t ) = GA P 1 +
AP
Questa ampiezza vale ancora, ovviamente, zero quando s(t) = − s( t ) max , ma, quando s(t) si
allontana anche di poco dal minimo negativo, essa è più alta, rispetto a Vγ, del caso in cui mancava
G. Di conseguenza, la corrente nel diodo segue con maggiore precisione il segnale modulante anche
nei pressi dei picchi negativi, come confermato dalla simulazione, ottenuta per G=7:
La differenza con la forma d’onda ottenuta in assenza di G è abbastanza evidente.
Autore: Sandro Petrizzelli
12
Demodulatori di ampiezza non coerenti
Concludendo l’intero discorso, possiamo affermare che, se l’indice di modulazione
non è sufficientemente basso, l’unica possibilità di far funzionare
in modo accettabile il demodulatore a valor medio è quella di
amplificare il segnale ricevuto prima della demodulazione.
Generalmente, si impone, in sede di dimensionamento, la condizione GV1 ( t ) > 4Vγ , dalla quale si
può quindi ricavare quanto deve valere l’amplificazione: dato che
(GV1 ( t ) )min
s( t ) max
s( t )
= GA P 1 −
= GA P 1 +
AP
A P min
la condizione da imporre è che
(GV1 ( t ) )min ≥ 4Vγ sostituend
o → G ≥
4Vγ
s( t ) max
A P 1 −
AP
Una alternativa più sofisticata a questo modo di procedere
potrebbe essere quella mantenere polarizzato il diodo in prossimità
del ginocchio di corrente: in questo modo, non si fa altro che ridurre la soglia di
accensione, in quanto basta un piccolo aumento della tensione applicata per mandare il diodo in
conduzione.
DEMODULATORE AD INVILUPPO
Un demodulatore ad inviluppo è un semplice circuito fatto nel modo seguente:
Se non ci fosse il condensatore, questo circuito sarebbe un semplice raddrizzatore a singola
semionda del tipo visto prima. Al contrario, il condensatore introduce nel circuito una costante di
tempo, determinando così un comportamento dinamico radicalmente diverso dal comportamento che
si avrebbe con la sola resistenza in serie al diodo. In pratica, il parallelo RC è quella che si definisce
una cella di mantenimento.
Principio di funzionamento
Vediamo di capire il funzionamento del circuito, che è essenzialmente quello di un
campionatore del valore di picco del segnale in ingresso.
13
Autore: Sandro Petrizzelli
Appunti di “Comunicazioni Elettriche” - Capitolo 10 (parte III)
Supponiamo il condensatore inizialmente scarico ed applichiamo il segnale d’ingresso all’istante
t=0. Per semplicità, supponiamo che il segnale di ingresso sia una sinusoide del tipo
v( t ) = A cos(ω0 t ) .
Supponiamo che la tensione ai capi del diodo sia inferiore alla tensione di accensione Vγ: in
questo caso, il diodo è spento, per cui non lascia passare corrente; se non passa corrente, la caduta di
tensione sul resistore è nulla, ossia è nulla la tensione di uscita, ed inoltre la tensione ai capi del
diodo coincide con la tensione di ingresso v(t).
Deduciamo che, finche la tensione ai capi del diodo è al di sotto della Vγ, il diodo rimane spento.
Quando la tensione v(t) eguaglia il valore Vγ, il diodo va in conduzione, mantenendo
approssimativamente costante ai suoi capi la tensione Vγ; succedono allora due cose:
• la prima è che la tensione di uscita prende a seguire l’ingresso (la differenza è semplicemente
nella Vγ ai capi del diodo, che in prima approssimazione possiamo anche trascurare);
• la seconda è che la corrente che attraversa il diodo si ripartisce tra il condensatore ed il
resistore: questo consente che il condensatore si carichi ad una tensione che coincide, nel
tempo, con v(t).
Si arriva poi al momento in cui v(t) raggiunge il suo valore massimo VM e lo stesso vale quindi
per la tensione ai capi del condensatore. A questo punto, la corrente nel resistore ha raggiunto il suo
massimo valore VM/R (massimo perché è massima la tensione ai suoi capi), mentre la corrente nel
condensatore si annulla. Non appena v(t) riprende a scendere, la corrente nel condensatore diventa
negativa, ma la corrente nella resistenza è ancora tale che la corrente nel diodo resti positiva.
Di conseguenza, il diodo non si è ancora interdetto quando la tensione v(t) ha raggiunto il picco
positivo. L’istante in cui il diodo si interdice è quello in cui la
corrente
nella
resistenza
viene
interamente
fornita
dal
condensatore: in questo caso, infatti, un ulteriore diminuzione della corrente implicherebbe una
corrente negativa nel diodo, il quale, non potendola fornire, si interdice6.
Se il diodo si spegne, non lascia passare corrente, per cui è come se il circuito si riducesse
soltanto al parallelo tra il condensatore ed il resistore RL. Essendo il condensatore carico (ad una
tensione leggermente inferiore al picco VM), parte la scarica del condensatore e sappiamo bene che
tale scarica avviene con una costante di tempo τ=CR: ciò significa che, dopo un intervallo di tempo
pari a circa 4-5 costanti di tempo, il condensatore sarà completamente scarico.
Sennonché, mentre il condensatore si va scaricando, la tensione in ingresso v(t) continua a variare
(e con essa varia anche la tensione ai capi del diodo, che segue perfettamente il suo andamento,
anche se i valori sono ovviamente diversi, dato che c’è una tensione non nulla sul parallelo); essa
scende, diventa negativa, raggiunge il picco inferiore (pari a -VM) e poi riprende a salire; arriva
allora il momento in cui il suo valore e quello della tensione del condensatore (che nel frattempo si
sta scaricando), sono tali che la tensione ai capi del diodo superi nuovamente il valore Vγ: deve
accadere che la tensione di ingresso superi quella sul condensatore proprio di Vγ. Quando questo
avviene, il diodo entra nuovamente in conduzione: se la scarica del condensatore non si è ancora
completata (cosa che dipende dal valore della costante di tempo τ e dalla frequenza della sinusoide in
ingresso), essa si interrompe e riparte invece la carica. La tensione di uscita riprende ora a seguire
perfettamente quella di ingresso.
Ovviamente, a questo punto si ripete il ciclo di prima, in quanto il diodo conduce quel tanto che è
necessario per riportare la tensione sul condensatore al valore VM; appena questo valore viene
raggiunto, il diodo si spegne nuovamente e quindi riprende la scarica.
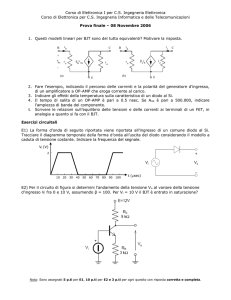
Possiamo in definitiva completare l’andamento della tensione di uscita nel modo seguente:
6
Più avanti viene fatto il calcolo rigoroso dell’istante di spegnimento del diodo
Autore: Sandro Petrizzelli
14
Demodulatori di ampiezza non coerenti
intervalli di conduzione
del diodo
vO(t)
∆V
VM
periodo T
t
intervallo di scarica
del condensatore
Istante di spegnimento del diodo
Possiamo facilmente calcolare, applicando le leggi di Kirchoff, l’istante in cui il diodo si spegne. Come
abbiamo detto poco fa, tale istante corrisponde a quello in cui i valori di corrente sono tali per cui il diodo
dovrebbe farsi attraversare da una corrente inversa: non potendo far passare tale corrente, il diodo si inverte.
Andiamo allora a determinare una espressione analitica della corrente i(t) nel diodo, verificando quando
dovrebbe diventare negativa.
Applicando semplicemente la LKC otteniamo che la corrente diretta nel diodo vale
i( t ) = i R ( t ) + i C ( t ) =
dv ( t ) v C ( t )
dv ( t )
v R (t)
+C C
=
+C C
R
dt
R
dt
Quando il diodo è in conduzione, la tensione di uscita coincide con la tensione di ingresso a meno della
Vγ ai capi del diodo stesso:
i( t ) =
v( t ) − Vγ
R
+C
d
(v( t) − Vγ ) = v(t ) − Vγ + C dv( t)
dt
R
R
dt
Se la tensione di ingresso è sinusoidale del tipo v( t ) = Asin (ω0 t ) , abbiamo dunque che
i( t ) =
Asin (ω0 t ) Vγ
−
+ AC cos(ω0 t )
R
R
La condizione di diodo acceso si ha fin quando i(t)>0, mentre il diodo di spegne non appena i(t)=0:
Asin (ω0 t off ) Vγ
−
+ AC cos(ω0 t off ) = 0
R
R
Trascurando, in prima approssimazione, il termine Vγ/R (cioè ritenendo il diodo ideale), otteniamo
1
tg (ω0 t off ) + C = 0
→ tg (ω0 t off ) = −RC
→ ω0 t off = arctg(− RC ) + kπ
R
15
Autore: Sandro Petrizzelli
Appunti di “Comunicazioni Elettriche” - Capitolo 10 (parte III)
A prescindere adesso dai conti analitici, è evidente che il diodo è in conduzione fin quando risulta
Asin (ω0 t )
+ AC cos(ω0 t ) > 0 , per cui ci basta diagrammare gli andamenti di queste due funzioni sinusoidali,
R
individuando gli intervalli di tempo nei quali la loro somma è sicuramente positiva.
Usando la solita simulazione, possiamo comodamente visualizzare l’andamento della tensione ai capi del
diodo rispetto all’andamento della tensione di ingresso v(t):
La tensione di ingresso è stata scelta con ampiezza A=5V, non eccessivamente superiore alla Vγ, che
quindi ha influenza non trascurabile. Come si nota, gli intervalli di tempo in cui il diodo è in conduzione
(intervalli corrispondenti a quelli in cui la tensione ai capi del diodo stesso è positiva e superiore alla soglia
Vγ) sono abbastanza brevi e perfettamente equispaziati nel tempo.
Influenza di C sulla tensione di uscita
E’ evidente, dunque, che, grazie alla presenza del condensatore, noi riusciamo a mantenere la
tensione ai capi del carico nell’intorno del valore VM, nell’ipotesi, ovviamente, che l’ingresso sia
sinusoidale. La massima differenza raggiunta dalla tensione sul carico, rispetto al valore VM, è
stata indicata nella figura con ∆V e prende il nome di “ripple”: è chiaro allora che, se
vogliamo rendere la tensione ai capi del carico il più possibile
costante, dobbiamo minimizzare il valore di ∆V. Ci poniamo quindi il
problema di come effettuare questa minimizzazione.
Il discorso qualitativo fatto prima ci dà già una risposta a questa domanda: infatti, è evidente che
una riduzione di ∆V si ottiene riducendo il tempo che il
condensatore ha a disposizione per scaricarsi.
Allora, dato che non possiamo agire sulla forma d’onda della tensione, la cui frequenza è
costante, dobbiamo necessariamente agire sulla costante di tempo τ=RC della legge di scarica: in
particolare, dobbiamo aumentare il valore di questa costante di tempo, in modo tale che la
scarica richieda più tempo. Per aumentare τ, possiamo aumentare o R o C. Vediamo per esempio
come scegliere il valore di C.
Vediamo allora di fare qualche passaggio analitico per confermare questa conclusione.
In primo luogo, dovendo determinare C in modo da minimizzare ∆V, ci serve una espressione di
∆V in funzione appunto di C. Questa espressione è data dalla legge di scarica del condensatore:
VO ( t ) = VM e
−
t
RC
Con riferimento all’ultimo grafico disegnato, indicando con T l’intervallo di tempo necessario
perché la tensione di uscita parta da VM e torni a VM, possiamo scrivere che
Autore: Sandro Petrizzelli
16
Demodulatori di ampiezza non coerenti
VO ( t = T) = VM − ∆V = VM e
−
T
RC
T
−
RC
→ ∆V = VM 1 − e
Questa, in realtà, è una relazione approssimata, in quanto la scarica del condensatore non si
interrompe dopo un intervallo di tempo di ampiezza T da quando è cominciata, ma dopo un
intervallo di ampiezza leggermente inferiore, pari per l’esattezza a T-∆t. Tuttavia, ai fini dei
nostri calcoli, si tratta di una approssimazione lecita.
Adesso, se facciamo l’ipotesi, anch’essa ragionevole, che RC>>T, possiamo sviluppare in serie
di Taylor il termine esponenziale, fermandoci al 2° termine: abbiamo in tal modo che
T VM T
∆V = VM 1 − 1 +
=
RC RC
Questa è dunque una semplice espressione di ∆V in funzione di C ed è chiaro che, al crescere di
C, come previsto, il valore di ∆V diminuisce in modo proporzionale.
Serviamoci di una simulazione P-Spice per l’applicazione di quella formula. Consideriamo,
come ingresso, una tensione sinusoidale di ampiezza VM=5V e frequenza f=1kHz, cioè di
periodo T=1ms. Fissiamo arbitrariamente una resistenza R=10kΩ. Per determinare il valore di C,
dobbiamo imporre un valore per ∆V: prendendo ad esempio ∆V=5*10-4, si ottiene C=10µF.
Usando questi valori per la simulazione, otteniamo quanto segue:
Come si nota, il ripple è effettivamente estremamente piccolo.
Se adesso diminuiamo il valore di C, prendendo ad esempio C=1µF, otteniamo un ripple teorico
∆V=5*10-3 e la simulazione indica quanto segue:
E’ evidente che il ripple è aumentato abbastanza rispetto a prima.
17
Autore: Sandro Petrizzelli
Appunti di “Comunicazioni Elettriche” - Capitolo 10 (parte III)
Effetto di demodulazione AM-standard e dimensionamento del circuito
A questo punto, dobbiamo chiederci se il funzionamento appena descritto consente al circuito di
comportarsi come un demodulatore ad inviluppo; dobbiamo cioè vedere cosa succede quando la
tensione di ingresso ha l’andamento di un segnale modulato AM standard.
Il circuito può funzionare da demodulatore in quanto è capace di
campionare, nell’istante di massimo, l’inviluppo della sinusoide e
mantenere questo valore. Quindi, esso non si comporta più come il demodulatore a valor
medio, cioè come un raddrizzatore con in cascata un filtro passa-basso, ma come un qualcosa che
ristabilisce periodicamente, in corrispondenza dei picchi, la tensione sul condensatore, tensione che
viene conservata grazie all’azione dell’ RC, che si comporta come cella di mantenimento.
Osserviamo a questo punto una cosa: se l’inviluppo del segnale in ingresso cresce, non abbiamo
problemi di sorta, dato che il condensatore si porta di volta in volta ad una tensione crescente. Meno
immediato è invece il funzionamento quando l’inviluppo decresce: per esempio, se non ci fosse la
resistenza R, il condensatore non avrebbe mai la possibilità di scaricarsi, per cui la tensione ai suoi
capi potrebbe seguire l’inviluppo solo quando è crescente, mentre, quando è decrescente, si
manterrebbe ad un valore costante pari all’ultimo picco raggiunto7 (questo è l’effetto clamping
ampiamente visto in precedenza). Quindi, possiamo subito dedurre che la presenza di una resistenza
R, di valore non infinito, in parallelo a C, è necessaria per dare al condensatore una memoria non
infinita.
Quest’ultima considerazione ci dice che dobbiamo dimensionare opportunamente la costante di
tempo RC che regola la scarica del condensatore: sicuramente, essa non dovrà essere troppo grande
se si vuole che la cella di mantenimento segua l’inviluppo quando questo è decrescente; allo stesso
tempo, però, il parallelo RC deve anche presentare un comportamento da filtro passa-basso, in
quanto deve eliminare dall’inviluppo l’ondulazione residua dovuta alla presenza della portante
raddrizzata: ciò significa che la quantità τ=RC deve essere sufficientemente grande da attribuire al
filtro una frequenza di taglio ω=1/RC sufficientemente bassa.
Abbiamo dunque due esigenze contrastanti sul valore del prodotto
RC. Il giusto compromesso dipende dal contesto in cui il circuito si
può trovare.
Generalmente, il demodulatore ad inviluppo si trova come carico di un risonante che rappresenta
l’uscita dell’ultimo stadio di un amplificatore a media frequenza:
Dato che lo scopo del risonante è quello di mantenere ai suoi capi una tensione praticamente
sinusoidale, a fronte di un ingresso che può anche avere un alto contenuto armonico (pensiamo alla
corrente di collettore di un transistor nei circuiti visti a proposito dei modulatori), diventa importante
valutare l’effetto del demodulatore sul funzionamento del risonante. In particolare, sappiamo che
bisogna valutare l’influenza del demodulatore sul fattore di merito complessivo del risonante,
ossia quindi lo smorzamento che il demodulatore aggiunge a quello intrinseco del risonante.
7
L’incapacità di seguire l’inviluppo dell’ingresso è spesso indicata con l’espressione Failure to follow.
Autore: Sandro Petrizzelli
18
Demodulatori di ampiezza non coerenti
Consideriamo allora il circuito dell’ultima figura e conduciamo un ragionamento in termini
energetici. Supponiamo che il pilotaggio del circuito avvenga tramite una corrente puramente
sinusoidale del tipo cos(ω0 t ) ; se il risonante è accordato alla frequenza ω0 e se non ci fosse il
demodulatore, la tensione ai capi del risonante sarebbe del tipo V1 cos(ω0 t ) , cioè sincrona in fase e in
frequenza con l’ingresso, in accordo al concetto di risonanza. Supponiamo, allora, che, anche in
presenza del demodulatore, il fattore di merito8 si mantenga ancora abbastanza alto da garantire la
tensione V1 cos(ω0 t ) ai capi del risonante. Sotto questa ipotesi, se la costante di tempo R0C0 è molto
grande rispetto al periodo 2π/ω0 della sinusoide, possiamo affermare, per i discorsi fatti prima, che la
tensione V0(t) in uscita dal demodulatore è approssimativamente costante (a meno di un piccolo
ripple ∆V) sul valore V1.
Sotto questa condizione, la resistenza R0 dissipa una potenza costante pari a V12 / R 0 . Questa
potenza dissipata costituisce un ulteriore effetto di smorzamento sul risonante, che si aggiunge a
quello rappresentato dalla resistenza R. Per modellare in modo più comodo questa dissipazione,
possiamo calcolare la resistenza equivalente Req che, posta in parallelo al risonante, dissipa la stessa
potenza V12 / R 0 :
R
V12
V12
=
→ R eq = 0
R 0 2R eq
2
Il fattore 2 che compare nella formula deriva dal fatto che la tensione ai capi di Req non è costante
come quella ai capi di R0, ma è alternata (di ampiezza sempre pari a V1).
A questo punto, possiamo calcolare il fattore di merito QT:
R
Q T = ω0 C(R // R eq ) = ω0 C R // 0
2
Imponendo la condizione QT>>1, possiamo quindi validare i discorsi fatti fino ad ora e ritenere
che la tensione ai capi del risonante sia del tipo V1 cos(ω0 t ) e che quella ai capi di C0 sia
approssimativamente pari a V1, con un minimo ripple ∆V.
Non è finita qui, in quanto un’altra importante condizione da imporre, affinché il demodulatore si
comporti come tale, è che il diodo conduca ad ogni periodo. Per garantire questo, dobbiamo
necessariamente porci nella condizione peggiore e dimensionare il circuito in tale condizione.
La condizione peggiore è quella in cui si verifica una diminuzione brusca della tensione ai capi
del risonante, dovuta allo spegnimento del generatore di corrente g( t ) cos(ω0 t ) . Se il generatore si
spegne, la tensione sul risonante decresce esponenzialmente con una costante di tempo che sappiamo
essere data da τRLC=2RC; d’altra parte, se la tensione sul parallelo R0//C0 di uscita si smorza più
rapidamente della tensione sul risonante, il diodo conduce comunque ogni periodo. In altre parole, la
costante di tempo τ0=R0C0 deve essere sufficientemente minore della costante di tempo τRLC=2RC:
sotto questa ulteriore condizione, possiamo star certi che la tensione di uscita segua sempre
l’inviluppo.
In definitiva, le condizioni sotto le quali il circuito illustrato prima è in grado di seguire
l’inviluppo sono le seguenti:
8
A rigore, dovremmo parlare di fattore di merito Q per riferirci al risonante RLC da solo e di fattore di merito a carico QT per
riferirci al risonante con in cascata il demodulatore: in quest’ultimo contesto, è QT che deve risultare >>1 per avere ancora una
tensione sinusoidale ai capi del risonante. Il fattore di merito quantifica, in pratica, la prevalenza della tensione sinusoidale a
frequenza ω0 (frequenza di risonanza) rispetto alle componenti di tensione a frequenze multiple di ω0: quanto maggiore è il
fattore di merito, tanto più la tensione a frequenza ω0 prevale sulle altre.
19
Autore: Sandro Petrizzelli
Appunti di “Comunicazioni Elettriche” - Capitolo 10 (parte III)
• per garantire che la tensione sul risonante si mantenga praticamente sinusoidale, è necessario
R
che Q T >> 1 , dove Q T = ω0 C R // 0 ;
2
2π
• per garantire che il ripple ∆V sull’uscita sia piccolo, è necessario che R 0 C 0 >>
;
ω0
• infine, per garantire che il diodo conduca in ogni periodo, è necessario che 2RC >> R 0 C 0 .
Relazione tra tensione di uscita e tensione di ingresso (non sinusoidale)
Continuiamo a considerare il circuito del paragrafo precedente, nuovamente riportato nella figura
seguente:
Se il generatore di corrente fornisse una corrente puramente sinusoidale cos(ω0t), abbiamo ormai
capito che la tensione ai capi del risonante sarebbe anch’essa sinusoidale, del tipo V1cos(ω0t), è che
la tensione di uscita del demodulatore ad inviluppo sarebbe costante, del tipo v0(t)≅V1.
Adesso supponiamo invece, come indicato in figura, che la corrente forzante sia g(t)cos(ω0t); ci
interessa determinare l’andamento della tensione ai capi del risonante e quello della tensione di
uscita. E’ evidente che la tensione ai capi del risonante non potrà più essere del tipo V1cos(ω0t), ma
sarà invece del tipo v1(t)cos(ω0t): se accertiamo che v1(t) segue l’inviluppo di g(t), siamo allora certi
che l’azione del successivo demodulatore è quella di dare v0(t)≅g(t).
Allora, ci concentriamo sulla ricerca di un circuito equivalente a quello considerato, nel quale
però sia evidenziato solo il legame tra g(t) e v1(t).
Il parallelo R0C0 di uscita è un normale filtro passa-basso, che possiamo lasciare così com’è, a
patto di pilotarlo in modo opportuno.
Il pilotaggio di R0C0 avviene tramite la corrente nel diodo, quando è acceso. Partiamo dal caso
semplice in cui la corrente di ingresso è cos(ω0t), per cui l’inviluppo della tensione ai capi del
risonante è costante sul valore V1: in questo caso, abbiamo visto che il diodo conduce solo per un
piccolo intervallo di tempo a cavallo di ciascun picco della tensione sul risonante.
iD(t)
iDm
∆t
Autore: Sandro Petrizzelli
∆t
20
t
Demodulatori di ampiezza non coerenti
Quindi, attraverso il diodo passano degli impulsi di corrente molto stretti, di durata ∆t pari al
tempo di conduzione del diodo e che si ripetono esattamente con periodo T=2π/ω0. Se l’inviluppo
della tensione sul risonante è costante, l’area di tali impulsi è sempre la stessa9.
Al contrario, se l’inviluppo della tensione sul risonante non è costante, l’area di tali impulsi dovrà
necessariamente essere diversa, mentre resta praticamente immutata la posizione degli impulsi.
Quindi, in presenza di un pilotaggio in corrente del tipo g(t)cos(ω0t), e quindi di una tensione sul
risonante del tipo v1(t)cos(ω0t), nel diodo circolano ancora impulsi di corrente (di durata molto più
piccola rispetto al periodo della portante), la cui area dipende, istante per istante, da v1(t), cioè
dipende dalla tensione che il diodo deve far localizzare sul condensatore quando va in conduzione.
Questi impulsi di corrente hanno un’area che dipende da v1(t), ma la loro posizione rimane
praticamente sempre la stessa: ciò significa che la corrente nel diodo può essere vista come un
segnale periodico, non sinusoidale, modulato d’ampiezza da v1(t). Se nel tempo abbiamo un
prodotto, in frequenza abbiamo una convoluzione: lo spettro della corrente del diodo è quindi la
convoluzione di infiniti impulsi (dovuti alla periodicità) con lo spettro di v1(t), per cui tale spettro è
costituito da un termine in banda base e infiniti altri termini alle altre armoniche10. Tutti questi
termini sono proporzionali a V1(f), per cui, mandando il segnale a pilotare il filtro R0C0, quest’ultimo
dà in uscita solo il termine in banda base:
Indichiamo allora con id0(t) il termine in banda base della corrente nel diodo, ossia il termine che
il filtro R0C0 lascia passare. Se indichiamo con v0(t) la corrispondente tensione ai capi del diodo,
possiamo cominciare a schematizzare il circuito a valle del diodo nel modo seguente:
Ci serve adesso il circuito a monte del diodo. Dobbiamo perciò sostituire l’insieme del risonante e
del generatore di corrente con un circuito che elimini l’andamento sinusoidale della tensione ai capi
del risonante stesso e evidenzi l’inviluppo di tale tensione.
Possiamo subito dire che il generatore di corrente imporrà, anziché una corrente g(t)cos(ω0t), una
corrente g(t).
9
Nei due intervalli indicati in figura, il diodo è in conduzione: da un punto di vista fisico, la conduzione del diodo è determinata
dal fatto che, durante questi intervalli, il diodo deve rifornire il circuito di quella carica che si è persa durante l’ultima scarica
del condensatore. Questo per rispettare il principio di conservazione della carica.
10
Modulando d’ampiezza un segnale periodico, quello che si ottiene è la modulazione di ampiezza di tutte le armoniche del segnale.
21
Autore: Sandro Petrizzelli
Appunti di “Comunicazioni Elettriche” - Capitolo 10 (parte III)
Non possiamo invece più usare il risonante così com’è, visto che, a bassa frequenza, l’induttore si
comporta da cortocircuito; al contrario, dobbiamo sostituire il risonante con il suo equivalente
relativo al solo inviluppo; tale equivalente è rappresentato dalla resistenza R in parallelo ad una
capacità 2C:
Per valutare l’ampiezza di v1(t), dobbiamo calcolare la componente di corrente che fluiva nel
risonante e che determinava la tensione v1(t)cos(ω0t): dato che facciamo riferimento alla condizione
di risonanza del circuito, tale corrente fluiva solo in R, dando così luogo appunto ad una tensione
v1(t)cos(ω0t) ai capi di R e di tutto il risonante.
Applicando la LKC, abbiamo semplicemente
g( t ) cos(ω0 t ) − i D1 ( t ) cos(ω0 t )
Riportando il discorso in termini di inviluppi, deduciamo che, per far tornare il tutto, la corrente
di uscita da considerare è proprio iD1(t), ossia l’inviluppo della componente a pulsazione ω0 della
corrente che attraversa il diodo.
A questo punto, non resta che calcolare il punto di lavoro del circuito, il che è fattibile solo se le
due porte da collegare presentano la stessa coppia corrente-tensione.
Come tensione di uscita dell’ RLC abbiamo evidenziato l’inviluppo v1(t), il quale, per le ipotesi
fatte, dovrà coincidere con v0(t). Le due correnti considerate, iD0(t) e iD1(t), sono invece diverse: la
prima è il termine in banda base della corrente reale nel diodo, mentre invece la seconda è
l’inviluppo della componente di prima armonica. D’altra parte, se gli impulsi di corrente nel diodo
sono molto stretti, si può affermare che le armoniche di più bassa frequenza siano pari al doppio del
termine in banda base, il che significa che i D1 ( t ) = 2i D 0 ( t ) : infatti, ... .
Per effettuare l’intersezione tra i due circuiti, dobbiamo dunque trovare il modo di raddoppiare
iD0(t) o di dimezzare iD1(t), lasciando però invariate le rispettive tensioni. Scegliamo questa seconda
strada in modo da lasciare inalterato il circuito di uscita: per dimezzare iD1(t), lasciando invariata la
tensione alla stessa porta, possiamo raddoppiare l’impedenza e dimezzare la corrente forzante, il che
ci porta quindi al seguente circuito equivalente:
Autore: Sandro Petrizzelli
22
Demodulatori di ampiezza non coerenti
A questo punto, finche è valido il modello, abbiamo praticamente finito, in quanto basta applicare
le leggi di Kirchoff per individuare il legame tra l’ingresso g(t) e l’uscita v0(t): a questo proposito, si
nota che il circuito è diventato un semplice filtro RC passa basso, dove la resistenza è 2R//R0, mentre
la capacità è C+C0; di conseguenza, la tensione di uscita è, a meno di una costante moltiplicativa, il
risultato del filtraggio passa-basso dell’ingresso con frequenza di taglio
ωRC =
1
1
2π (2R // R 0 )(C + C 0 )
Dimensionando questa frequenza di taglio in modo che sia maggiore della banda B del segnale
modulante, il risultato è una tensione di uscita molto simile a g(t), come volevamo.
Concludiamo ricordando che, dopo un ragionamento di questo tipo, è sempre opportuno verificare
la validità del modello utilizzato. Nel nostro caso, il modello è valido fin quando la corrente nel
diodo è fatta di impulsini praticamente equispaziati, ossia se il diodo conduce ogni periodo, ossia
quindi se è verificata la condizione 2RC >> R 0 C 0 . Nel circuito equivalente ricavato poco fa, il diodo
non compare proprio in base all’assunzione di partenza che il diodo abbia il comportamento
desiderato. Allora, una verifica di validità del modello può essere semplicemente fatta sul segno
della corrente i(t) (con riferimento all’ultima figura), che deve essere sempre positivo. Se, in qualche
istante, dovesse risultare i(t)<0, il modello perderebbe di validità, in quanto richiederebbe una
corrente nel diodo negativa, cosa che sappiamo essere impossibile.
DEMODULATORE AD INVILUPPO COME DEMODULATORE COERENTE
Come ultimo argomento a proposito dei demodulatori non coerenti, verifichiamo la possibilità che
un demodulatore ad inviluppo possa essere usato come demodulatore coerente.
A questo scopo, riprendiamo ancora una volta l’espressione di un segnale modulato AM-standard:
s( t )
cos(ω P t )
s t ( t ) = A P cos(ω P t ) + s( t ) cos(ω P t ) = A P 1 +
A P
Come più volte osservato, questo segnale può essere interpretato come un segnale modulato in
s( t )
DSB-SC, dove però il segnale modulante non è s(t), ma 1+
: di conseguenza, se noi mandiamo
AP
s( t )
questo segnale in ingresso ad un demodulatore coerente, esso ci darà proprio 1+
. I conti, per
AP
confermare queste tesi, non sono necessari.
Adesso vogliamo esaminare il problema opposto: dato un segnale s t ( t ) = A P s( t ) cos(ω P t ) modulato
in DSB-SC, possiamo estrarre s(t) usando un demodulatore ad inviluppo? La risposta è sicuramente
affermativa se s(t) è sempre positivo, in quanto sappiamo che l’unico problema del demodulatore ad
inviluppo è quello di non poter seguire le variazioni di segno. In realtà, anche se s(t) cambia segno,
possiamo comunque ottenere qualcosa: infatti, ricevendo in ingresso il segnale
s t ( t ) = A P s( t ) cos(ω P t ) , ci basta trasformarlo, prima della demodulazione ad inviluppo, in una
portante modulata AM-standard; questo è ottenibile sommando l’oscillazione locale al segnale
ricevuto:
x ( t ) = s t ( t ) + k cos(ω P t ) = A P s( t ) cos(ω P t ) + k cos(ωP t ) = (k + A P s( t ) )cos(ωP t )
23
Autore: Sandro Petrizzelli
Appunti di “Comunicazioni Elettriche” - Capitolo 10 (parte III)
Dovremo ovviamente scegliere la costante k in modo che risulti verificato il solito vincolo
k + A P s( t ) > 0 .
Quindi, anziché moltiplicare il segnale ricevuto per k cos(ωP t ) , come faremmo in un demodulatore
coerente, facciamo la somma dei due segnali e poi demoduliamo ad inviluppo.
A questo punto, però, data la necessità di generare localmente l’oscillazione k cos(ω P t ) , si
ripropone il problema della fase di tale oscillazione: anche nell’ipotesi di ottenere la stessa frequenza
ωP, non potremo mai ottenere deterministicamente la fase della portante usata in trasmissione. Nel
caso della demodulazione coerente, l’errore di fase tra portante e oscillazione locale provoca, come
sappiamo, solo una attenuazione del segnale ricostruito. Vediamo allora che succede quando usiamo
un demodulatore ad inviluppo con lo schema appena descritto:
s t ( t ) = A P s( t ) cos(ω P t )
x(t)
u(t)
+
k cos(ω P t + ε )
Con riferimento al solito metodo dei vettori rotanti, mentre il demodulatore coerente misura
semplicemente la proiezione del segnale ricevuto sulla retta rappresentativa dell’oscillazione locale,
il demodulatore ad inviluppo calcola semplicemente la risultante dei due vettori rappresentativi di
st(t) e dell’oscillazione locale:
demodulazione coerente
demodulazione ad inviluppo
cos(ωC t )
R(t)
ε( t )
s(t)
AP
s(t)
cos(ωC t )
R(t)
ε( t )
sin (ωC t )
sin (ωC t )
oscillazione
locale
oscillazione
locale
Il modulo di tale risultante è
R=
(A P cos ε + s(t ) )2 + (A P sinε )2
E’ evidente che, se ε è elevato, l’operazione porta ad una distorsione apprezzabile del segnale.
Ricordiamo che i demodulatori ad inviluppo sono utili perché consentono di fare operazioni non
realizzabili con quelli coerenti: oltre alla demodulazione in segnale AM-standard, la tipica
applicazione è quella nei demodulatori FM, che rappresentato il prossimo argomento.
Autore: Sandro Petrizzelli
24
Demodulatori di ampiezza non coerenti
ESTRAZIONE DELL’INVILUPPO NEGATIVO
Consideriamo nuovamente il demodulatore ad inviluppo esaminato nel paragrafo precedente, ma
invertiamo la polarità del diodo:
E’ abbastanza intuitivo rendersi conto che questo circuito si comporta ancora da demodulatore ad
inviluppo, con la differenza che estrae l’inviluppo negativo del segnale forzante.
In presenza di un semplice ingresso sinusoidale, si ottiene quanto segue:
Il motivo di questo comportamento è semplice: mentre prima il diodo entrava in conduzione sulle
semionde positive della tensione di ingresso, adesso entra in conduzione su quelle negative, in
quanto solo in questo caso la tensione sull’anodo risulta maggiore di quella sul catodo.
Autore: SANDRO PETRIZZELLI
e-mail: [email protected]
sito personale: http://users.iol.it/sandry
succursale: http://digilander.iol.it/sandry1
25
Autore: Sandro Petrizzelli