MISURA DEL MOMENTO DI INERZIA E
DEL MOMENTO DI ATTRITO DI UN VOLANO
Scopo dell’esperienza è lo studio del moto di rotazione intorno ad un
asse orizzontale di un volano (disco rotante intorno ad un albero orizzontale
poggiato su due perni con piccolo attrito) di momento d’inerzia incognito,
accelerato da un peso attaccato ad un filo arrotolato intorno all’albero del
volano stesso.
Il moto viene studiato in due fasi successive:
1
• 1a fase: moto accelerato,
durante la quale il peso scende srotolando il filo e accelera il volano.
• 2a fase: moto decelerato,
che ha inizio quando il filo cui il peso è attaccato si è completamente
svolto; in questa seconda parte del moto il volano è decelerato a causa
di un piccolo momento d’attrito (volvente) presente tra i cuscinetti a
sfera e il perno.
La misura dell’ accelerazione angolare nella prima fase del moto, unitamente a quelle dei tempi di distacco del pesetto e di arresto del volano, permettono la determinazione del momento d’inerzia del volano e del coefficiente
d’attrito volvente κr .
BREVI RICHIAMI DI MECCANICA CLASSICA
• Quantità di moto: ~p = m ~v
valida per un punto materiale; per n punti materiali P~ = m1 ~v1 + m2 ~v2 +
· · · mn ~vn ; per un corpo rigido ~v è la velocità del baricentro.
d~p
La seconda legge della Dinamica si può scrivere: F~ =
nell’ipotesi che
dt
m = cost.
• Conservazione della quantità di moto:
dP~
=0
dt
per un sistema meccanicamente isolato.
La quantità di moto di un sistema è costante nel tempo se la risultante delle
forze esterne che agiscono sullo stesso è nulla.
• Momento della quantità di moto o momento angolare
~ = ~r ∧ p~ = ~r ∧ m~v
rispetto ad un polo: L
2
~ è quindi definito da: L = r mv sin θ
Il modulo di L
• ~p ⊥ ~r → θ = 90◦ → L = r mv (massimo)
• ~p k ~r → θ = 0◦ → L = 0 (minimo)
• Momento di una forza
~ = ~r ∧ F~
rispetto ad un polo: M
~ è quindi definito da: M = r F sin θ
Il modulo di M
• F~ ⊥ ~r → θ = 90◦ → M = r F (massimo)
• F~ k ~r → θ = 0◦ → M = 0 (minimo)
• Teorema del momento della quantità di moto: Nel caso in cui
il polo sia fermo, condizione sempre realizzabile con opportuna scelta del
~
~ = dL
sistema di riferimento, vale la relazione: M
dt
~
dL
=0
• Conservazione del momento angolare:
dt
~ di un sistema è costante nel tempo se è nullo il
Il momento angolare L
momento delle forze esterne che agiscono sullo stesso. Ciò p̀ossibile in tre
casi:
• La forza esterna è nulla (il sistema è meccanicamente isolato).
• La forza è applicata in un punto dell’asse di rotazione, per cui il polo
è fermo e ~r = 0.
3
• La forza è diretta verso l’asse di rotazione, per cui se F~ k ~r, il loro
prodotto vettoriale è nullo.
• Momento di inerzia I:
Grandezza fisica utile per descrivere il comportamento dinamico dei corpi
in rotazione attorno ad un asse. Tale grandezza tiene conto di come è distribuita la massa del corpo attorno all’asse di rotazione e dà una misura dell’
inerzia del corpo rispetto alle variazioni del suo stato di moto rotatorio.
Per un sistema di n punti materiali con masse mi e distanze ri dall’asse
n
X
mi ri2
di rotazione comune z: Iz =
i=1
Nel caso di un corpo rigido il momento di inerzia consente di esprimere
in modo semplice il momento della quantità di moto o momento angolare:
!
n
n
n
X
X
X
Lz =
mi ri vi =
mi ri2 ω =
mi ri2 ω →
i=1
i=1
i=1
Lz = Iz ω
dove vj sono le velocità tangenziali delle particelle e
vj
ω=
la loro velocità angolare (uguale per tutti i punti se il corpo è rigido).
rj
~
~ = dL
Applicando il teorema del momento della quantitá di moto M
dt
otteniamo la seguente relazione in forma scalare (valida per il volano)
Mz = Iz
dω
dt
ATTRITI
• Attrito viscoso
La forza di attrito viscoso è la resistenza che un fluido oppone quando un
corpo tenta di muoversi all’interno di esso. Un caso semplice è quello in cui la
forza di attrito viscoso è direttamente proporzionale alla velocità relativa tra
corpo e mezzo circostante (cioè ne dipende attraverso una relazione lineare),
e verso opposto
F~ = −Av ~v
4
• Attriti radente e volvente
Forze che sono dovute allo strisciamento che avviene su superfici piane (radente) e al rotolamento (senza strisciamento) tra superfici curve (volvente).
Entro grandi limiti questo tipo di attrito è indipendente dalla velocità relativa tra le superfici a contatto, mentre è proporzionale alla forza normale, cioè
alla forza con cui le due superfici interagiscono in direzione perpendicolare
ad esse e che ne impedisce la compenetrazione.
La forza di attrito radente e/o volvente ha:
• Direzione: tangente alla superficie di contatto
• Verso: contrario al verso del movimento
• Punto di applicazione: baricentro della superficie di contatto
• Modulo: la forza di attrito è sempre una frazione della forza che la
massa appoggiata esercita sul piano di appoggio. Tale frazione è legata
ad una quantità caratteristica, detta coefficiente d’attrito, che dipende
dai materiali delle due superfici a contatto e dal modo in cui esse sono
state lavorate.
Esperienza del volano:
Ipotesi e assunzioni semplificative
• Distribuzione di massa a simmetria cilindrica → il baricentro del volano
giace sull’asse di rotazione;
• Massa del filo trascurabile rispetto alla massa del volano e alla massa
m in caduta libera → il momento motore – dovuto alla forza di gravità
agente sul pesetto (di modulo m g r) – è costante.
• Filo inestensibile e totalmente aderente alla filettatura del cilindro piccolo → velocità relativa tra filo e filettatura al distacco nulla.
• Un sistema di riferimento opportuno è quello che ha per origine il baricentro del volano e un asse coincidente con il suo asse di simmetria.
Tutti i momenti polari, delle forze e della quantità di moto, saranno
riferiti al baricentro che ha velocità nulla.
5
TRATTAZIONE TEORICA
Le forze applicate al sistema fisico del volano sono:
• sulla massa che scende srotolando il filo:
1. la forza di gravità di modulo P = m g
2. la tensione del filo di modulo T ′ , in verso opposto alla forza peso
3. la forza Fv′ dovuta all’attrito viscoso dell’ambiente entro cui il
pesetto si muove
• sul volano:
1. la tensione del filo di modulo T , nello stesso verso della forza di
gravità
2. le forze di attrito radente e volvente che si esercitano tra le superficie delle parti del sistema in moto relativo reciproco. Sia Mr il
loro momento resistente.
3. la forza dovuta all’attrito viscoso tra le superficie del sistema in
movimento e l’ ambiente stesso. Sia Mv il momento resistente relativo.
Possiamo dunque impostare le equazioni scalari del moto della massa m
e del volano:
• Seconda legge della Dinamica applicata al pesetto di massa m:
m a = m g − T ′ − Fv′
• Teorema del momento della quantità di moto appli- cato al volano:
dω
T r − Mr − Mv = I
dt
Dall’assunzione di filo inestensibile e di massa trascurabile =⇒ T = T ′
In queste condizioni, la velocità angolare del volano ω, la velocità lineare
del peso v e la sua accelerazione sono legati tra di loro dalla relazione:
ω=
1 dv
a
v
dω
=
=
=⇒
r
dt
r dt
r
Il sistema di due equazioni diventa dunque:
6
(
m a = m g − T ′ − Fv′
a
T r − Mr − Mv = I
r
Risolviamo la prima equazione rispetto a T e sostituiamo nella seconda:
(
T = m g − m a − Fv′
a
(m g − m a) r − Mr − (Mv + Fv′ r) = I
r
Possiamo distinguere i seguenti termini:
Mv + Fv′ r = κv ωr
momento resistente
Mr = κr r
per attrito viscoso
momento resistente
per attrito radente e volvente
Quindi si ottiene:
m g r − κr r − κv ω r = I
a
+ mar
r
Infine, ricordando che a = ω̇ · r, l’equazione del moto è data da
un’equazione differenziale di primo ordine in ω velocità angolare del volano:
m g r − κr r − κv ω r = ω̇(I + m r 2 )
o equivalentemente, da un’equazione differenziale di secondo ordine in θ
variabile angolare (tale che ω = θ̇)
m g r − κr r − κv θ̇ r = θ̈(I + m r 2 )
SOLUZIONE DELL’EQUAZIONE DEL MOTO
Effettuiamo il cambiamento di variabile:
φ = m g r − κr r − κv r θ̇, da cui
1
φ̇
φ̇ = −κv r θ̈ e θ̈ = −
κv r
Dall’equazione del moto si ha che θ̈ =
φ
(I + m r 2 )
Quindi possiamo scrivere: φ = −A−1
o φ̇ con
Ao =
κv r
I + m r2
7
Separando le variabili si ottiene
dφ
= −Ao dt;
φ
e quindi integrando troviamo ln φ − ln φo = −Ao (t − to ).
Infine elevando a potenza neperiana giungiamo alla soluzione per la variabile φ
φ = φo e[−Ao (t−to )] .
Ora sostituendo le quantità di partenza si ottiene:
m g r − κr r − κv r θ̇ = (m g r − κr r − κv r θ̇o ) e[−Ao (t−to )]
−κv θ̇ = −m g + κr + (m g − κr − κv θ̇o ) e[−Ao (t−to )]
θ̇ = Bo − (Bo − θ˙o ) e[−Ao(t−to )] dove
m g − κr
κv
da cui derivando rispetto al tempo:
θ̈ = Ao (Bo − θ˙o ) e[−Ao (t−to )]
Bo =
e integrando
Z t
Z tal tempo:
Z t rispetto
˙
e[−Ao (t−to )] dt
Bo dt − (Bo − θo )
θ̇dt =
θ − θo =
to
to
to
Z
Bo − θ˙o Ao (t−to ) [−Ao (t−to )]
= Bo (t − to ) −
e
d[Ao (t − to )]
Ao
0
Bo − θ˙o [−Ao (t−to )] Ao (t−to )
−e
= Bo (t − to ) −
0
Ao
Bo − θ˙o θ = θo + Bo (t − to ) −
1 − e[−Ao (t−to )]
Ao
RICAPITOLAZIONE
• Equazioni (1): valide intervallo di tempo [to , td ], dove td è l’istante
corrispondente al completo srotolamento del filo e quindi al distacco
della massa m.
• θ = θo + Bo (t − to ) −
Bo − θ˙o 1 − e[−Ao (t−to )]
Ao
v
• θ̇ = Bo − (Bo − θ˙o ) e[−Ao (t−to )] = ω =
r
a
• θ̈ = Ao (Bo − θ˙o ) e[−Ao (t−to )] = ω̇ =
r
8
• Ao =
κv r
I + m r2
e
Bo =
m g − κr
κv
• Equazioni (2): valide nell’ intervallo di tempo [td , tA ], dove tA è l’istante
corrispondente all’arresto del volano =⇒ il momento motore dovuto al
peso è nullo (m = 0).
• θ = θd + Bd (t − td ) −
Bd − θ˙d 1 − e[−Ad (t−td )]
Ad
v
• θ̇ = Bd − (Bd − θ˙d ) e[−Ad (t−td )] = ω =
r
• θ̈ = Ad (Bd − θ˙d ) e[−Ad (t−td )] = ω̇ =
• Ad =
κv r
I
e
Bd = −
a
r
κr
κv
• Le condizioni iniziali al momento del distacco t = td si ottengono
particolarizzando le equazioni (1).
• Le condizioni finali all’istante di arresto t = ta si ottengono particolarizzando le equazioni (2).
θ̇d = Bo − (Bo − θ˙o ) e[−Ao (td −to )]
B − θ˙o
θd = θo + Bo (td − to ) − o
1 − e[−Ao (td −to )]
Ao
˙d ) e[−Ad (ta −td )]
0
=
θ̇
=
B
−
(B
−
θ
a
d
d
˙
θa = θd + Bd (ta − td ) − Bd − θd 1 − e[−Ad (ta −td )]
Ad
Esse formano un sistema di 4 equazioni nelle 4 incognite θ̇d , I, κv , κr ,
dati gli spostamenti angolari θo , θd , θa
e i tempi to , td , ta .
9
10
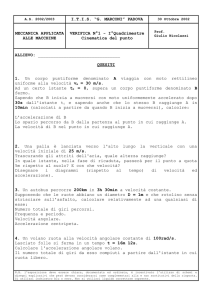
Osservazioni
• to ≤ t ≤ td agisce il momento motore (filo non distaccato) e il momento resistente (attriti). La velocità angolare aumenta, l’accelerazione
angolare diminuisce per effetto dell’attrito viscoso.
• td < t < ta agisce il momento resistente (filo distaccato).
• t ≥ ta non agisce alcun momento (volano fermo).
dω
presenta un punto angoloso → l’accele• Per t = td la velocità ω =
dt
razione angolare presenta una discontinuità.
• La parte tratteggiata delle curve rappresenta l’andamento di velocità
ed accelerazione angolari nei casi in cui la massa m non si staccasse,
cioè con filo infinitamente lungo.
• In questo ipotetico caso per t → ∞ la velocità tende al limite asintotico
costante Bo e l’accelerazione tende a zero (moto uniforme).
• Per t = ta la velocità presenta un secondo punto angoloso e l’accelerazione presenta un discontinuità, passando da un valore negativo a
zero.
• Per t > ta il volano è fisicamente fermo e non agisce più alcun momento
resistente. Nello spazio matematico ideale se il momento resistente continuasse ad agire dopo l’arresto del volano, quest’ultimo comincerebbe
a ruotare in senso opposto.
SOLUZIONE DELL’EQUAZIONE DEL MOTO DEL
VOLANO CON ATTRITO VISCOSO TRASCURABILE
(
ma = mg − T
a
T r − Mr = I
r
Risolviamo la prima equazione rispetto a T e sostituiamo nella seconda:
(
T = mg −ma
a
(m g − m a) r − Mr = I
r
Ricaviamo l’accelerazione del massa m:
11
a=
(m g r − Mr )r
I + m r2
Prima fase del moto nell’intervallo [to , td ]: l’accelerazione a del pesetto è
dω
a
costante come pure l’accelerazione angolare del volano:
=
dt
r
MOTO UNIFORMEMENTE ACCELERATO: θ̈ = Co = cost.
Dalle equazioni del moto lineare del pesetto:
v = vo + a (t − to )
1
s = so + vo (t − to ) + a (t − to )2
2
si passa direttamente a quelle del moto di rotazione del volano:
v
= ωo + Co (t − to )
r
1
θ = θo + ωo (t − to ) + Co (t − to )2
2
ω =
dove
m g r − Mr
Co =
I + m r2
Seconda fase del moto nell’intervallo [td , ta ]: dopo il distacco della massa
m quello del volano è un
MOTO UNIFORMEMENTE DECELERATO: θ̈ = Cd = cost.
In assenza del momento motore dovuto al pesetto e trascurando quello
resistente dell’attrito viscoso, il teorema della quantità di moto applicato al
dω
volano, M = I , si semplifica in:
dt
a
e quindi:
−Mr = I
r
ω = ωd + Cd (t − td )
1
θ = θd + ωd (t − td ) + Cd (t − td )2
2
dove Cd = −
κr r
Mr
=−
I
I
12
13
Particolarizzando agli istanti t = td e t = ta otteniamo quindi:
• condizioni iniziali:
θ̇d = θ̇o + Co (td − to )
• condizioni finali:
0 = θ̇a = θ̇d + Cd (ta − td )
• definizione di Co
m g r − κr r
g
κr
2
2
I=
− mr = mr
−
−1
Co
Co r m C o r
• definizione di Cd
κr r
θ̇d
θ̇o + Co (td − to )
Cd = −
=−
=−
I
(ta − td )
(ta − td )
θ̇o + Co (td − to )
κr = I
r (ta − td )
Risolvendo il sistema "di 2 equazioni nelle 2 incognite
I e κr otteniamo:
#−1
g
θ̇o
ta − to
I = m r2
+
−1
Co r
ta − td Co (ta − td )
#
"
θ̇o + Co (td − to )
κr = m (g − Co r)
θ̇o + Co (ta − to )
Date le condizioni iniziali: to = 0, θo = 0, θ̇o = 0 :
td
g
−1
1−
I = mr
Co r
ta
td
κr = m (g − Co r)
ta
2
dove Co = θ̈ = cost. è l’accelerazione angolare del volano durante prima fase
del moto (pesetto attaccato).
In assenza di attrito radente e volvente
(κr = 0) l’arresto del volano avrebbe luogo dopo un tempo infinito (ta →
∞) ed effettuando
il passaggio
al limite si otterrebbe:
g
−1
I = m r2
Co r
κr = 0
14
ESPERIENZA DI LABORATORIO
Dati dell’esperienza
• Registrare il numero identificativo del volano utilizzato.
• Da leggersi in bacheca:
1. raggio del volano r
2. massa del pesetto m
3. momento di inerzia del volano I
• numero massimo di avvolgimenti del filo sul volano: n = 13 giri
• accelerazione di gravità alla latitudine di Padova: g = 980.6 cm s−2
Ricerca dello zero degli angoli
• Si fa partire il volano quando il filo recante la massa motrice è completamente avvolto e si contrassegna con una tacca la posizione corrispondente al distacco della massa motrice.
• Si ripete il procedimento 4 volte (2 volte per n = 1 e 3 volte per
n = 13) e si calcola per eccesso l’angolo corrispondente alle due posizioni
estreme. Tale ∆θ (in rad) viene assunto come errore di sensibilità della
variabile angolare θ.
Operazioni di misura
• Si fissano le condizioni iniziali: to = 0, θo = 0, θ̇o = 0 . Scelta una tacca come riferimento, ad ogni riavvolgimento del filo il volano deve essere
riposizionato nella medesima configurazione rispetto alla tacca (sempre
la stessa!) prescelta.
• Si imposta la sensibilità del cronometro manuale a ∆t = 0.01 s. Non
occorre utilizzare sensibilità più spinte dato che il tempo di reazione
biologico (per attivare e disattivare il crinometro) è di circa 0.1 s.
• Per ogni fissato numero intero n di giri del volano (1 ≤ n ≤ 13) si
effettuano 10 misure del tempo di distacco td , misurato dal momento
in cui viene lasciato agire il pesetto (t = 0) fino al suo distacco.
• Per 1 − 3 volte di misura il tempo che intercorre tra t = 0 e l’arresto
del volano, t = ta .
15
Elaborazione dei dati
• Si producono quindi le tabelle del tipo:
1
2
..
.
16.83
17.23
..
.
10
17.09
3
5
7
9
tempi parziali al distacco (in
30.57 39.20 47.04 52.23
31.00 39.57 47.80 51.98
..
..
..
..
.
.
.
.
30.79 39.71 47.99 52.91
t̄j
16.22
31.00
39.72
47.99
52.39
57.22
64.081
σt̄j
0.12
0.16
0.11
0.15
0.12
0.11
0.14
n
1
11
13
s)
57.50
57.93
..
.
64.20
64.09
..
.
57.92
65.91
tempo di arresto del volano (in s)
1324.04
1208.39
1391.68
• Relativamente ad ogni fissato n (numero intero di giri del volano) si
risolve il problema della misura per i tempi:
nj
1 X
media aritmetica: t̄j =
tji
nj i=1
scartov
quadratico medio della media:
u
nj
X
u1
1
t
σt̄j =
(tij − t̄j )2
nj (nj − 1) j=1
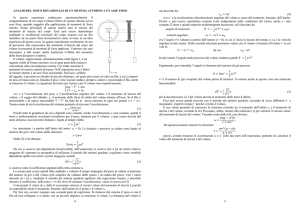
•Verifica dell’ipotesi di trascurabilità dell’attrito viscoso
Abbiamo visto che se Mv = 0, ovvero κv = 0, il moto del volano è
uniformemente accelerato nell’intervalllo di tempo [to , td ].
Date le condizioni iniziali: to = 0, θo = 0, θ̇o = 0 vale la relazione:
1
θ = θ̈ t2 , cioè l’angolo di rotazione è proporzionale al quadrato del
2
tempo.
Passando ai logaritmi: log θ = − log 2 + log θ̈ + 2 log t. Graficamente nel
piano (0, log t, log θ) ciò definisce l’equazione di una retta con coefficiente
angolare 2.
Quindi: κv = 0 =⇒ θ̈ = cost. =⇒ allineamento dei punti nel piano
(0, log t, log θ).
A questo scopo si costruisce il grafico:
16
• Definizione dei rettangoli di errore mediante l’utilizzo della propagazione
degli errori sulla funzione y = log x.
Si cerca di stimare gli errori massimi. L’indeterminazione sull’angolo ∆θ va
espressa in radianti!
• La dipendenza quadratica della variabile θ dalla coordinata temporale
è verificata nei limiti di errore se è possibile trovare le rette di mimina e
massima pendenza che passino per tutti i rettangoli d’errore e i cui coefficienti
angolari soddisfino alla disuguaglianza mmin ≤ 2 ≤ mmax .
17
Registrare i due valori dell’intercetta verticale, q1 e q2 e calcolare
il valore
q1 + q2 q2 − q1 medio e relativa indeterminazione massima: q =
±
2
2 • Soluzione al problema della misura relativamente all’accelerazione angolare θ̈ per ogni numero intero di giri del volano, cioè per ogni valore di θ.
I risultati possono essere presentati in una tabella del tipo (indicare le unità
di misura).
n
1
3
5
7
9
11
13
θ̈¯
0.0242
0.0400
0.0349
0.0044
0.0398
0.0428
0.0451
σθ̈¯
0.0019
0.0008
0.0007
0.0010
0.0098
0.0002
0.0001
• Previa verifica della compatibilità dei valori dell’accelerazione relativi ai diversi gruppi, calcolare la media pesata per l’accelerazione angolare e il relativo
scarto quadratico medio:
Pn ¯
θ̈i pi
¯
θ̈p = Pi=1
n
i=1 pi
s
1
σθ̈¯ = Pn
p
i=1 pi
!2
1
dove i pesi sono pi =
σθ̈¯
i
• Stimata l’accelerazione angolare si calcolano le intercette minima e massima
della retta di equazione
log θ = − log 2 + log θ̈ + 2 log t,vale a dire:
q̃
= − log 2 + log(θ̈¯ − 3σ ) e
min
p
θ̈¯p
¯
q̃max = − log 2 + log(θ̈p + 3σθ̈¯ )
p
Si calcola valor medio e intederminazione massima:
q̃min + q̃max q̃min − q̃max ±
q̃ =
.
2
2
Infine si confronta con la stima precedente q (a partire dalle rette di minima e
massima pendenza) e se ne valuta la compatibilità.
Utilizzare il metodo dei minimi quadrati per determinare il coefficiente angolare
e l’intercetta della retta che meglio si adatta ai punti nel piano log(t) − −θ̈ , con
le rispettive incertezze. Calcolare infine il coeffciente di correlazione r.
18
Stima sperimentale del momento di inerzia I del volano
e del coefficiente di attrito volvente κr
Riprendiamo le formule già ricavate sotto l’assunzione di attrito viscoso trascurabile:
td
g
2
−1
1−
I = mr
ta
θ̈o r
td
κr = m (g − θ̈o r)
ta
Ricordo che nel formalismo usato il coefficiente κr è pari al modulo della forza di
attrito volvente. Tutte le quantità sono note. Per td si prenda la media aritmetica
dei tempi relativi al numero più alto di giri effettuati; per ta si prenda la media
aritmetica delle 2 o 3 misure effettuate.
• Stima degli errori massimi ∆I e ∆κr mediante la propagazione degli errori
massimi.
Si considerino le funzioni a più variabili: I = I(m, r, g, θ̈, td , ta ) e κr =
κr (m, r, g, θ̈, td , ta ).
Riportarne la derivazione formale in funzione degli errori massimi ∆m, ∆r, ∆g, ∆θ̈, ∆td , ∆ta
esplicitando tutti i passaggi.
Verificare la compatibilità della stima ottenuta per I con il valore riportato in
bacheca (nei limiti delle rispettive indeterminazioni).
19