POLITECNICO DI BARI
Dip. di INGEGNERIA DELL'AMBIENTE E PER LO SVILUPPO SOSTENIBILE - II FACOLTA’ DI INGEGNERIA
CORSO DI TECNICA ED ECONOMIA DEI TRASPORTI
Docente: Michele OTTOMANELLI
A.A. 2006/07
2 - MECCANICA DELLA LOCOMOZIONE
Principi fondamentali
Corso di Tecnica ed Economia dei Trasporti
Docente: Michele OTTOMANELLI
PREMESSA
MECCANICA
DELLA
LOCOMOZIONE
TECNICA DEI TRASPORTI
ORGANIZZAZIONE TECNICA
DEI TRASPORTI
2
TRAZIONE
Corso di Tecnica ed Economia dei Trasporti
Docente: Michele OTTOMANELLI
PREMESSA
TRAZIONE
Studia gli apparati motori
(caratteristiche e loro
prestazioni) capaci di
produrre
le
FORZE
ATTIVE.
In particolare studia:
• natura ed entità delle
forze propulsive;
MECCANICA
DELLA
LOCOMOZIONE
ORGANIZZAZIONE
TECNICA DEI
TRASPORTI
Studia il moto dei veicoli sotto
l’azione delle FORZE ATTIVE
(di trazione) e PASSIVE
(resistenze).
In particolare studia:
• natura ed entità delle forze
resistenti;
• fenomeno dell’aderenza;
• stabilità del veicolo.
Lo scopo è quello di definire i
Studio
dell’azienda
di
trasporto e delle sue varie
forme, pubbliche o private.
In particolare studia sia
argomenti tecnici (quali il
movimento, il problema
della
manutenzione
e
rinnovamento
degli
impianti, ecc.) sia argomenti
economici
(il
bilancio
aziendale, il problema delle
tariffe, gli ammortamenti, la
determinazione dei costi,
ecc.).
PARAMETRI CARATTERISTICI
DEL MOTO [s(t), v(t), a(t)]
attraverso
lo
studio
dell'equilibrio del veicolo.
3
Corso di Tecnica ed Economia dei Trasporti
Docente: Michele OTTOMANELLI
MECCANICA DELLA LOCOMOZIONE
SISTEMA
DI
STUDIO
=
+
VEICOLO
Elemento mobile che
effettua il trasporto
Es.: auto, nave, treno
aereo,nastro trasportatore,
vagoncino funivia, ecc.
SEDE
Elemento fisso nel quale
si muove il veicolo
Es.: strada, rotaia, tubo,
fune, guide nei nastri
trasportatori, ecc.
Per semplicità lo studio meccanico del sistema di trasporto si limita al solo
elemento mobile: veicolo o sistemi di veicoli.
4
Corso di Tecnica ed Economia dei Trasporti
Docente: Michele OTTOMANELLI
MECCANICA DELLA LOCOMOZIONE
SISTEMI TERRESTRI
Ci occupiamo dei veicoli che poggiano sul TERRENO (strada, binario)
mediante RUOTE (pneumatico, cerchione) e sono dotati di organi
propulsivi (motori) in grado di trasmettere alle ruote COPPIE MOTRICI
che, al contatto ruota-superficie di rotolamento, spingono il veicolo stesso
grazie all'insorgere delle FORZE DI ADERENZA.
5
Corso di Tecnica ed Economia dei Trasporti
Docente: Michele OTTOMANELLI
MECCANICA DELLA LOCOMOZIONE
Il veicolo è un corpo sul quale agisce un
insieme di forze di diversa natua ed entità:
• forze dipendenti dalla massa del veicolo,
quali la forza peso, la forza di inerzia e la
forza centrifuga,
• forze attive (trazione o frenatura),
• forze passive (resistenze al moto).
P=
H=
F=
R=
L=
6
forza peso
forza di reazione della sede
forza di trazione
forza resistente
forze trasversali di guida
Corso di Tecnica ed Economia dei Trasporti
Docente: Michele OTTOMANELLI
MECCANICA DELLA LOCOMOZIONE
Condizioni meccaniche per il moto del veicolo
Lo studio del sistema di trasporto, riferito al solo elemento mobile
(veicolo), avviene verificando che il sistema di forze che agisce sul veicolo
costituisce un sistema equilibrato che soddisfa determinate condizioni
meccaniche necessarie al moto.
Tale studio può effettuarsi, ritenendo valido il principio di sovrapposizione degli
effetti, mediante la verifica di alcune condizioni elementari e facendo sì che nel
loro insieme vengano soddisfatte le condizioni fondamentali di sicurezza e
regolarità.
7
Corso di Tecnica ed Economia dei Trasporti
Docente: Michele OTTOMANELLI
MECCANICA DELLA LOCOMOZIONE
CONDIZIONI MECCANICHE
FONDAMENTALI PER IL MOTO
Condizioni meccaniche per il moto del veicolo
8
SICUREZZA
REGOLARITÀ
Il veicolo deve mantenere
sempre
un
assetto
equilibrato e stabile, in
senso sia verticale sia
orizzontale, con riferimento
ad
una
posizione
di
riferimento prestabilita, tanto
nel moto rettilineo quanto in
quello curvilineo.
Il veicolo deve muoversi nel
modo prestabilito, ossia con
la dovuta velocità e nella
direzione voluta e, deve
disporre di un sistema di
guida, adatto alle condizioni
in cui opera, perché possa
seguire
la
traiettoria
richiesta.
Corso di Tecnica ed Economia dei Trasporti
Docente: Michele OTTOMANELLI
MECCANICA DELLA LOCOMOZIONE
Condizioni meccaniche per il moto del veicolo
la sostentazione
Condizioni
di equilibrio
(riguardanti la sicurezza)
la stabilità
CONDIZIONI MECCANICHE
PER IL MOTO
la potenza motrice
Condizioni
di moto
la spinta motrice
(riguardanti la regolarità)
la guida
9
Corso di Tecnica ed Economia dei Trasporti
Docente: Michele OTTOMANELLI
MECCANICA DELLA LOCOMOZIONE
Condizioni di equilibrio
Si riferiscono alla condizione generale di sicurezza e se queste condizioni non
sono soddisfatte non è possibile realizzare il trasporto.
Esse comprendono: la sostentazione e la stabilità.
SOSTENTAZIONE
È la condizione per la quale il veicolo, sottoposto ad un sistema di forze, si mantiene alla
quota dovuta, ovvero quando la reazione verticale della superficie di rotolamento è in
equilibrio con l'insieme delle altre forze applicate.
STABILITÀ
È la condizione per la quale il veicolo può mantenere l'assetto necessario per effettuare il
trasporto. È soddisfatta quando:
∑X=0
Insieme delle forze
applicate al veicolo
∑ Mx = 0
∑Y=0
∑ My = 0
∑Z=0
∑ Mz = 0
10
Insieme dei momenti
applicati al veicolo
Corso di Tecnica ed Economia dei Trasporti
Docente: Michele OTTOMANELLI
MECCANICA DELLA LOCOMOZIONE
Condizioni di moto
Se sono verificate le condizioni di equilibrio, il veicolo è in grado di muoversi se
dispone della potenza necessaria a produrre il movimento nel modo richiesto:
spostare un certo carico utile (potenza motrice), alla velocità più opportuna
(spinta motrice), seguendo un certo itinerario con le modalità stabilite (guida).
POTENZA MOTRICE
Esprime l'attitudine del veicolo a muoversi secondo le modalità richieste dal sistema e
viene espressa dalla relazione:
N= F v = η C ω
N=
F=
v=
η=
C=
ω=
potenza motrice
forza
velocità
rendimento globale
coppia motrice
velocità di rotazione
11
Corso di Tecnica ed Economia dei Trasporti
Docente: Michele OTTOMANELLI
MECCANICA DELLA LOCOMOZIONE
Condizioni di moto
SPINTA MOTRICE
Il motore produce una forza, la cui azione su un elemento di contrasto genera,
per reazione, la spinta motrice F che muove il veicolo alla velocità V nelle
condizioni desiderate. Nei sistemi di trazione terrestre il contrasto di reazione
avviene per aderenza naturale, per azione dell'elica sul fluido dell’ambiente, per
repulsione, per attrazione o repulsione. Nei sistemi continui, invece, il contrasto
per generare la spinta avviene meccanicamente per mezzo della continuità
materiale fra motore ed elemento mobile.
GUIDA
Esprime la capacità di far seguire al veicolo la traiettoria voluta, mantenendone
stabilmente il percorso rettilineo o deviandolo in curva secondo la direzione
richiesta.
12
Corso di Tecnica ed Economia dei Trasporti
Docente: Michele OTTOMANELLI
MECCANICA DELLA LOCOMOZIONE
Forze attive e passive
Consideriamo un veicolo, o insieme di veicoli, il quale è sottoposto
durante il suo moto lungo il percorso alle seguenti forze:
forze dipendenti dalla MASSA del veicolo: forza peso, forza
centrifuga, forza di inerzia.
le FORZE PASSIVE, o resistenze, che indicheremo
genericamente con R, le quali si oppongono al moto del veicolo ed
insorgono solo se il veicolo è in moto;
FORZE ATTIVE, o di trazione, che indicheremo genericamente
con F, generate da meccanismi a bordo del veicolo o da altri
veicoli;
13
Corso di Tecnica ed Economia dei Trasporti
Docente: Michele OTTOMANELLI
MECCANICA DELLA LOCOMOZIONE
Forze esterne dovute alla massa del veicolo
FORZA PESO
Questa forza è applicata nel baricentro con direzione perpendicolare alla superficie
terrestre e orientata verso il basso.
W = m g (N nel sistema MKS)
dove m = massa (Kg) e g = accelerazione di gravità (9.81 m/s2)
Se la superficie di appoggio del veicolo
non è orizzontale, ma forma con
l'orizzontale un angolo, la forza peso W
può essere scomposta nelle due forze
Wcosα perpendicolare alla superficie
d'appoggio e Wsinα parallela ad essa.
14
Corso di Tecnica ed Economia dei Trasporti
Docente: Michele OTTOMANELLI
MECCANICA DELLA LOCOMOZIONE
Forze esterne dovute alla massa del veicolo
FORZA D’INERZIA
Un veicolo, sottoposto ad un'accelerazione (positiva o negativa) dv/dt, per il 2°
principio della dinamica, è sottoposto anche ad una forza (forza d'inerzia)
applicata nel suo baricentro, di direzione coincidente con quella del vettore
velocità e di verso opposto o concorde a quello della velocità a seconda che
l'accelerazione sia positiva o negativa.
Fa = m dv
dt
Ricordiamo il 2° principio della dinamica:
F=R+I
dove
F= forza motrice
R= forze resistenti applicate al veicolo
I= forze d’inerzia
15
Corso di Tecnica ed Economia dei Trasporti
Docente: Michele OTTOMANELLI
MECCANICA DELLA LOCOMOZIONE
Forze esterne dovute alla massa del veicolo
FORZA CENTRIFUGA
Se un veicolo segue una traiettoria non rettilinea, detto R il raggio istantaneo di
curvatura della traiettoria, esso è sottoposto ad una forza centrifuga pari a:
Fc = m v2
R
16
Corso di Tecnica ed Economia dei Trasporti
Docente: Michele OTTOMANELLI
MECCANICA DELLA LOCOMOZIONE
Equazione generale del moto
Consideriamo un veicolo (o insieme di veicoli) e siano F ed R le risultanti
dei sistemi di forze cui è sottoposto il veicolo durante il suo moto.
F=forze attive o di
trazione(le forze di
frenatura sono
considerate forze
negative);
R=forze passive o
resistenze(opposte alla
direzione di F);
Si pone l’ipotesi di considerare il veicolo o l’insieme di veicoli come un
come un PUNTO MATERIALE.
17
Corso di Tecnica ed Economia dei Trasporti
Docente: Michele OTTOMANELLI
MECCANICA DELLA LOCOMOZIONE
Equazione generale del moto
Sotto queste ipotesi l’equazione generale del moto di un veicolo isolato si
scrive:
(1)
F – R = Me dv
dt
Equazione Generale del Moto
dove
F = somma di tutte le forze attive (motrici o frenanti) applicate al veicolo
R = somma di tutte le resistenze applicate al veicolo
Me = massa equivalente del veicolo
dv = accelerazione (con v velocità nella direzione del moto)
dt
18
Corso di Tecnica ed Economia dei Trasporti
Docente: Michele OTTOMANELLI
MECCANICA DELLA LOCOMOZIONE
Equazione generale del moto
Definiamo Me la massa equivalente del veicolo o complesso di veicoli.
Tale massa, superiore alla massa semplice, tiene conto delle masse rotanti (ruote,
motori, ecc.) connesse con il moto traslatorio, ovvero fenomeni che determinano
aumenti di effetti energetici nelle fasi del moto vario.
Essa è data dalla seguente espressione:
Me =
P (1+µ)
g
dove
P = massa statica
g
P = peso del veicolo
g = accelerazione
µ = fattore d’inerzia, che considera le variazioni
del moto dovute alle masse rotanti
I valori di µ sono trascurabili
per i veicoli leggeri stradali,
mentre sono rilevanti in
relazione ai grossi veicoli
(bus, locomotive, ecc.)
Locomotive a vapore. µ ≈ 0.1 ÷ 0.2
Filobus………………. µ ≈ 00.8 ÷ 0.12
19
Corso di Tecnica ed Economia dei Trasporti
Docente: Michele OTTOMANELLI
MECCANICA DELLA LOCOMOZIONE
Principio di D'Alambert
Il principio di d’Alambert può scriverisi anche nella forma:
F = R + Me dv
dt
dove
F = forze interne (poiché generate da meccanismi a bordo del veicolo)
R = forze esterne applicate al veicolo
20
Corso di Tecnica ed Economia dei Trasporti
Docente: Michele OTTOMANELLI
MECCANICA DELLA LOCOMOZIONE
Principio di D'Alambert
La forza meccanica F applicata ad un SISTEMA MECCANICO IN
MOVIMENTO può essere considerata somma di due aliquote:
F = F’ + F”
dove
forza agente sul veicolo privo di vincoli (R=0)
F’ = Me dv
dt
F” = R
forza necessaria (forza perduta)a vincere la reazione dei
vincoli
F = ma
a=F/Me = dv/dt
21
Corso di Tecnica ed Economia dei Trasporti
Docente: Michele OTTOMANELLI
MECCANICA DELLA LOCOMOZIONE
Resistenze al moto
Quando un veicolo si muove spinto dalla forza motrice F si generano delle
forze R, per lo più contrarie ad F ed al moto, che chiamiamo resistenze.
Possiamo scrivere:
VEICOLO
(PESO, DIMENSIONI,
FORMA, MOTORE)
R = f (veicolo, ambiente, moto, percorso)
VARIAZIONI
DI PERCORSO
(CURVE E/O
PENDENZE)
CAUSE CHE
PRODUCONO
LE
RESISTENZE
CONDIZIONI DI
MOTO
(VELOCITA’)
22
AMBIENTE
(ARIA E/O
ACQUA)
Corso di Tecnica ed Economia dei Trasporti
Docente: Michele OTTOMANELLI
MECCANICA DELLA LOCOMOZIONE
Resistenze al moto
La resistenza complessiva R, pertanto, si divide in vari termini:
R = R0 + Re
dove
R0 = somma delle resistenze in rettilineo orizzontale, dovute al moto dei veicoli
Re = somma delle resistenze dovute alle accidentalità del tracciato(curve e/o pendenze)
A sua volta avremo che:
R0 = R1 + R2
dove
R1 =
R2 =
RESISTENZA DI ROTOLAMENTO inerente alla coppie cinematiche che
costituiscono il sistema ruota-terreno
RESISTENZA DEL MEZZO in cui si muove il veicolo
23
Corso di Tecnica ed Economia dei Trasporti
Docente: Michele OTTOMANELLI
MECCANICA DELLA LOCOMOZIONE
Resistenze al moto
Avremo ancora che:
R1 = R’1 + R”1
dove
R’1 = RESISTENZA DOVUTA ALLA COPPIA PERNO-CUSCINETTO
R”1 = RESISTENZA DOVUTA ALLA COPPIA RUOTA-TERRENO (ove per terreno
consideriamo la superfice di rotolamento, ovvero strada, rotaia, fune)
Infine per le resistenze accidentali avremo che:
Re = Ri + Rc
dove
Ri = RESISTENZA DOVUTA ALLA PENDENZA o DI RAMPA
Rc = RESISTENZA DOVUTA ALLA CURVE
24
Corso di Tecnica ed Economia dei Trasporti
Docente: Michele OTTOMANELLI
MECCANICA DELLA LOCOMOZIONE
Resistenze al moto
Riepilogando si ha:
R = R0 + Re
= (R1 + R2) + (Ri + Rc)
= (R’1 + R”1+ R2) + (Ri + Rc)
Osserviamo che:
R indica il valore assoluto delle resistenze;
r indica il valore unitario delle resistenze;
ovvero abbiamo che:
R = Pr
(con P peso del veicolo)
Esempio
R = 500 Kg
r = 5 Kg/ t (nel caso ferroviario)
r = 5 Kg/ q.li (nel caso stradale)
r= 0,005
r= 0,05
25
Corso di Tecnica ed Economia dei Trasporti
Docente: Michele OTTOMANELLI
MECCANICA DELLA LOCOMOZIONE
Le fasi del moto
Nel moto di un veicolo o di qualsiasi sistema di trasporto possiamo distinguere
varie fasi di marcia (movimento):
avviamento (a)
regime (r)
lancio o coasting (l)
frenatura(arresto) (f)
Il ciclo standard del moto comprende tutte le fasi meccaniche del movimento a-rl- f (ciclo completo), una fase di movimento deve essere composta almeno da un
avviamento ed una frenatura (ciclo ridotto); possono non essere presenti il regime
ed il lancio.
26
Corso di Tecnica ed Economia dei Trasporti
Docente: Michele OTTOMANELLI
MECCANICA DELLA LOCOMOZIONE
Le fasi del moto
Fasi
Condizioni di moto
Accelerazione
Forze
F=0
I=0
R=0
v=0
dv = 0
dt
accelerazione
avviamento
+ F – R = Me dv
dt
v>0
dv > 0
dt
F>0
I<0
R≠0
regime
+F=R
v>0
dv = 0
dt
F=–R
I=0
rallentamento o lancio
– R = Me dv
dt
v>0
dv < 0
dt
F=0
I=–R
frenatura
– F – R = Me dv
dt
v>0
dv < 0
dt
F<0
I>0
R≠0
Sosta
Movimento
Velocità
Tabella 1. Caratterizzazione delle fasi di esercizio
27
Corso di Tecnica ed Economia dei Trasporti
Docente: Michele OTTOMANELLI
MECCANICA DELLA LOCOMOZIONE
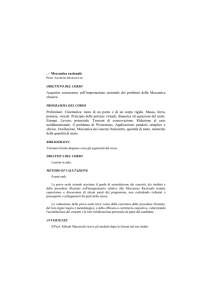
Le fasi del moto
Le aree comprese nel
diagramma di trazione
corrispondono agli spazi
percorsi
nei
rispettivi
intervalli di tempo, mentre
la tangente alla curva
esprime
la
variazione
istantanea di velocità dv/dt
(accelerazione):
fig. 1. Cicli standard del moto e del trasporto
— positiva (accelerazione) se tgα > 0 (dv/dt > 0) con 0 < α < π/2
— nulla (velocità costante) se tgα = 0 (dv/dt = 0) con α = 0;
— negativa (decelerazione) se tgα < 0 (dv/dt < 0) con π/2 < α < π
28
Corso di Tecnica ed Economia dei Trasporti
Docente: Michele OTTOMANELLI
MECCANICA DELLA LOCOMOZIONE
Le fasi del moto
In relazione a ciascuno specifico sistema di trasporto, le quattro fasi del moto
hanno un’importanza differente, e qualcuna di esse può eventualmente mancare.
M E T R O P O L IT A N A
N O R E G IM E
N O C O A S T IN G
S E G G IO V IE
FASE D EL M O TO
PREVALENTE
R E G IM E
29
Corso di Tecnica ed Economia dei Trasporti
Docente: Michele OTTOMANELLI
MECCANICA DELLA LOCOMOZIONE
I diagrammi del moto
ANALISI CINEMATICA DEL MOTO
Parametri che
descrivono il moto di
un veicolo isolato
30
t
s
v
a
j
= SOSTA + MOTO (a-r-l-f)
tempo di percorrenza
spazio percorso rispetto al tempo (s= ∫vdt)
velocità (v= ds/dt; v= ∫adt)
accelerazione, variazione di velocità (a= dv/dt; a= ∫jdt)
contraccolpo, variazione di accelerazione (j= da/dt)
Corso di Tecnica ed Economia dei Trasporti
Docente: Michele OTTOMANELLI
MECCANICA DELLA LOCOMOZIONE
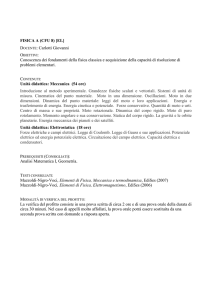
I diagrammi del moto
MOTO A VELOCITÁ UNIFORME
Questo diagramma di moto si usa per lo
studio di spostamenti di veicoli in ambito
extraurbano, per i quali abbiamo una fase
di regime.
lAB = spazio percorso dal punto A a B
tAB = lAB / vM
vM = velocità media lungo lo spostamento
a=0
fig.2 Cinematica di un veicolo che si sposta con v uniforme
31
Corso di Tecnica ed Economia dei Trasporti
Docente: Michele OTTOMANELLI
MECCANICA DELLA LOCOMOZIONE
I diagrammi del moto
MOTO CON VARIAZIONE LINEARE DELLA VELOCITÁ
Questo caso rappresenta le differenti fasi di
moto di un veicolo stradale ad uso privato:
partenza da fermo (accelerazione), fino al
raggiungimento della velocità di crociera
(regime) e frenatura del veicolo sino al suo
arresto.
Hp: aM = aM1 =aM2 = costante
fig.3 Cinematica di un veicolo che si sposta con v
uniformemente accelerata o decelerata
32
t1 = vM/ aM , tempo in avviamento
(t2 – t1) = lAB / vM – vM / aM ,tempo a regime
( tAB – t2) = vM /aM, tempo in frenatura
tAB = lAB / vM + vM / aM, tempo complessivo
s1 = vM2 / (2aM), spazio di avviamento
(lAB – s1) = vM2 / (2aM), spazio di frenatura
lAB – vM2 / aM, spazio percorso a regime
j=0
Corso di Tecnica ed Economia dei Trasporti
Docente: Michele OTTOMANELLI
MECCANICA DELLA LOCOMOZIONE
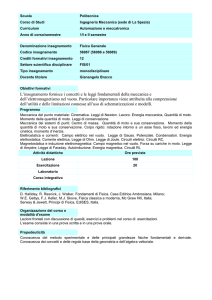
I diagrammi del moto
MOTO CON VARIAZIONE LINEARE DELLA VELOCITÁ
Rappresentazione più attinente alle condizioni
reali del moto, durante il quale il veicolo non
mantiene
costanti
né
velocità,
né
accelerazione.
Hp: aM = aM1 =aM2 = costante
j = j1 = j2 = j3 = j4
t1 = vM/ aM + aM / j, tempo in avviamento
(t2 – t1) = lAB / vM – vM / aM – aM / j, tempo a regime
( tAB – t2) = vM /aM + aM / j, tempo in frenature
tAB = lAB / vM + vM / aM + aM / j, tempo complessivo
s1 = vM (vM / aM – aM / j) / 2, spazio di avviamento
(lAB – s1) = vM (vM / aM – aM / j) / 2, spazio di frenatura
lAB – vM (vM / aM – aM / j) , spazio percorso a regime
fig.4 Cinematica di un veicolo che si sposta con variazione lineare dell’accelerazione
33
Corso di Tecnica ed Economia dei Trasporti
Docente: Michele OTTOMANELLI
RIFERIMENTI BIBLIOGRAFICI
• CANTARELLA, G.E. (2001), Introduzione alla tecnica dei trasporti e del
traffico con elementi di economia dei trasporti, UTET, Torino, pp. 84-89;
• DE LUCA, M. (1989), Tecnica ed Economia dei Trasporti, Ed. CUEN,
Napoli, pp. 81-85;
• ORLANDI, A. (1990), Meccanica dei Trasporti, Ed. Pitagora, Bologna, pp.
10-19 / 555-562.
• STAGNI, E. (1980), Meccanica della Locomozione, Ed. Pàtron, Bologna, pp.
5-13.
34