REPORT (Primaria)
Teoria e metodologia del movimento umano
Ipotesi di lavoro:
L’ipotesi di partenza della nostra ricerca è che intervenendo sulla struttura cognitiva di un robot questo
riesca ad adattarsi meglio ad un certo ambiente e ad esplorare più spazio possibile riconoscendo la
presenza di eventuali ostacoli
Descrizione dettagliata di tutti i passaggi e l’impostazione dell’esperimento, dati di impostazione
dell’evoluzione, struttura cognitiva scelta, compito:
Compito: Data l’esistenza di un certo ambiente quale robot si adatta meglio ?
Avviamo il programma “brainfarm exe” si apre una finestra “brainfarm configuration” clicchiamo sul tasto
“play”. Clicchiamo sull’icona “costruisci il tuo laboratorio” e poi su quella con scritto “corpo e cervello” . Il
software mette a disposizione quattro robot ognuno con diverse caratteristiche:
-
Khepera
(2 output neurons, 0 internal neurons, 3 infrared sensors, 1 ground sensors, 0
camera sensors)
Epuck
(2, 0, 3, 0, 0 )
NXT
(2, 0, 3, 0, 0 )
MAXRobot
(2, 0, 3, 0, 3 )
Tra questi abbiamo scelto quelli con caratteristiche strutturali molto differenti e cioè Khepera e
Maxrobot per osservare se il loro comportamento, inseriti in uno stesso ambiente, presentasse delle
diversità. Non abbiamo considerato i robot Epuck e NXT in quanto molto simili a Khepera. Per ogni
robot il software permette di modificare il numero di neuroni interni (da 0 a 4). Nei primi e esperimenti
come struttura cognitiva abbiamo deciso di aggiungere alle caratteristiche di base un solo neurone
interno. Quindi i nuovi robot avranno le seguenti caratteristiche
Khepera
(2 output neurons, 1 internal neurons, 3 infrared sensors, 1 ground sensors, 0
camera sensors)
MAXRobot
(2 output neurons, 1 internal neurons, 3 infrared sensors, 0 ground sensors, 3
camera sensors)
PROCEDIMENTO
Selezioniamo per l’esperimento il robot dal nome “khepera” . Dopo aver apportato le modifiche sopra
citate clicchiamo sul tasto “save” e salviamo il robot con il nome “khepera1” e poi clicchiamo “exit”.
Successivamente clicchiamo sull’icona “modalità di addestramento” scegliamo una modalità di
addestramento evoluzionistico e clicchiamo sul tasto “evoluzione”, appare la seguente finestra
PARAMETRI DI EVOLUZIONE
Abilità : esplorazione
Genitori:3
Figli:3
Generazioni : 1000
Lunghezza vita:1000
Mutazione genetica:bassa
Nel primo esperimento modifichiamo i seguenti parametri : “generazione:100” e “lunghezza vita:100”poi
clicchiamo sul tasto “salva progetto” e scegliamo il nome “ev1” e digitiamo di seguito “save”e poi “exit”.
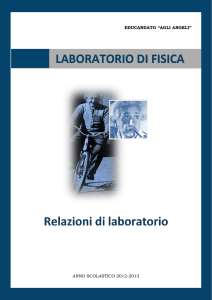
Torniamo indietro e clicchiamo sull’icona “Ambiente” nella schermata successiva scegliamo quali ostacoli
inserire nell’ambiente di esplorazione e cioè due muri e due cilindri (Fig1)
(Fig1)
Digitiamo il pulsante “salva l’ambiente” e scegliamo il nome “ambiente_T” poi “exit”. Infine clicchiamo
sull’icona “progetta esperimento” e appare la seguente schermata:
NOME PROGETTO……..
Robot name : seleziona un robot
Enviroment name: seleziona un ambiente
Training name: seleziona un addestramento
Carica progetto
esci
Digitiamo “seleziona un robot” appare un'altra finestra scegliamo il robot khepera1 che abbiamo
precedentemente creato e salvato, digitiamo “load” e proseguiamo allo stesso modo scegliendo
”ambiente _T “ per l’ambiente e “ev1” per l’addestramento, anche questi precedentemente impostati e
salvati. Digitiamo infine il tasto “carica un progetto” e salviamo l’intero progetto con il nome “test1”
clicchiamo poi su “exit”. Clicchiamo sull’icona “torna indietro” e poi su quella con la dicitura “Addestra”
selezioniamo l’esperimento “test1” e clicchiamo su “avvia”. Appare la schermata con l’ambiente scegliamo
l’opzione “me(computer)” e poi clicchiamo sul tasto “play” la simulazione si avvia. Utilizziamo lo stesso
procedimento per tutti i nostri test. Ogni volta che termina la simulazione clicchiamo sull’icona “save” e
salviamo i “genotipi” torniamo indietro usciamo dall’applicazione “brainfarm” e nella cartella dove è
contenuto il software clicchiamo sul file “fitness xls” con il tasto destro del mouse scegliamo di aprire il file
con “blocco note” dove appaiono i dati numerici delle performance clicchiamo su “modifica” e poi su
“sostituisci” e sostituiamo a tutti i dati il “punto” con la “ virgola” copiamo poi i dati sul foglio excel del file
“fitness xls” e infine selezioniamo i dati e clicchiamo su “inserisci” poi su “grafico” e poi su “linee due D”
Indicare i componenti del gruppo
Laura Gatto, 143592
Elena Bomparola, 142646
Rosangela Barletta, 143617
Manuela De Rosa, 143606
Quali modifiche sono state apportate sul robot?
Nel secondo, terzo e quarto esperimento incrementiamo la struttura cognitiva di Khepera
I° esperimento
II° esperimento
III° esperimento
IV° esperimento
Khepera1 (1 neuroni
interni)
Khepera2 (2 neuroni
interni)
Khepera3 (3 neuroni
interni)
Khepera4 (4 neuroni
interni)
Dal grafico emerge che i robot Khepera3 e Khepera4 hanno dimostrato maggiori capacità adattative
all’ambiente. In particolare Khepera3 ha mostrato dei miglioramenti leggermente più alti di Khepera4.
Ipotizziamo che ciò sia dovuto alla loro struttura cognitiva: avendo Khepera una struttura fisica molto
semplice la presenza di quattro neuroni potrebbe rallentare la capacità di reazione mentre al contrario la
presenza di tre neuroni garantisce una risposta più veloce e più accurata rispetto a due neuroni e un
neurone, su cui convoglierebbero troppe informazioni.
Per i successivi esperimenti utilizziamo il robot Maxrobot lavorando sulla sua struttura cognitiva
V°esperimento
VI° esperimento
VII°esperimento
VIII° esperimento
Maxrobot1
(1neurone interno)
Maxrobot2
(2 neuroni interni)
Maxrobot3
(3 neuroni interni)
Maxrobot4
(4 neuroni interni)
Questo grafico conferma una migliore prestazione di Maxrobot4 relativa a questo tipo di ambiente quindi
possiamo dire che è più performativo rispetto a Maxrobot 1-2-3 e ipotizziamo che le motivazioni siano
quelle sopra espresse.
Per i successivi esperimenti abbiamo deciso di modificare un parametro di evoluzione e cioè la “mutazione
genetica” impostandola con la modalità “alta”. In questo modo il “valore” dei geni trasmessi da i robot
genitori ai robot figli varia con una probabilità alta e le generazioni filiali si allontano di molto dal genotipo
dei genitori per cui parte delle informazioni sull’ambiente che questi trasmettono si perde. Abbiamo scelto
di testare Khepera1 e Khepera4 e Maxrobot1 e Maxrobot4, esattamente i “migliori” e i “peggiori” delle
prove precedenti per verificare se questi risultati venissero confermati o meno.
IX°esperimento
X° esperimento
XI°esperimento
XII° esperimento
Khepera1
Khepera4
Maxrobot1
Maxrobot4
Come si vede da grafico Khepera4-alto e MaxRobot4-alto mostrano delle performance peggiori rispetto a
Khepera4-basso e MaxRobot4-basso. Tale peggioramento è dovuto secondo noi al una perdita di
informazioni sull’ambiente nella trasmissione da padre a figlio a causa dell’alta variabilità genetica.
Proseguendo nella nostra ricerca abbiamo apportato un'altra modifica alla simulazione, abbiamo pensato
di cambiare il parametro di evoluzione “lunghezza vita” da 100 a 1000 per aumentare il tempo a
disposizione dei robot per esplorare l’ambiente e osservare se le loro rispettive performance subissero
delle modifiche. Abbiamo testato con mutazione genetica “bassa”
XII°esperimento
XIV°esperimento
XV°esperimento
XVI°esperimento
Khepera1
Khepera4
Maxrobot1
Maxrobot4
I risultati in quest’ultimo grafico confermano quelli precedenti: Khepera3, Khepera4 e Maxrobot4 sono i
più adatti ad esplorare l’ambiente da noi creato.
Tesi:
Agendo sulla struttura cognitiva possiamo modificare il comportamento di un robot per renderlo
“adattabile” ad un certo ambiente. Ad una struttura fisica corrisponde una struttura cognitiva che rende i
robot più performativi: i neuroni interni devono essere presenti in un numero tale che permetta una
risposta adattativa abbastanza veloce ma non approssimativa. Nel caso dei robot Khepera e Maxrobot
,utilizzati per i test effettuati e inseriti nell’ambiente da noi creato, la struttura cognitiva ideale si è
dimostrata di 3 neuroni interni nel primo e di 4 neuroni interni nel secondo. Tali risultati sono confermati
anche modificando alcuni parametri evoluzionistici come la “mutazione genetica” e la “lunghezza vita”
Indicare il/i problema/i incontrati
Il gruppo ha manifestato delle difficoltà iniziali dovute ad una non conoscenza della robotica, del software
“brainfarm” ma anche del programma “excel
Quale soluzione è stata adottata?
Per superare tali difficoltà si è fatto ricorso alle slide fornite dalla docente durante il corso e alle risorse
presenti in rete
Quante volte è stato necessario modificare la simulazione e i parametri di evoluzione per raggiungere
l’obiettivo?
Per raggiungere l’obiettivo e confermare l’ ipotesi di partenza sono state necessarie in totale sedici test
durante i quali i parametri di evoluzione sono stati modificati tre volte
Indicare le modalità di lavoro adottate nel lavoro di gruppo (collaborativo = ogni membro
contribuisce ad ogni singola parte del lavoro complessivo; cooperativo = ogni membro (o
sottogruppo) sviluppa in maniera autonoma una singola parte del lavoro complessivo; leadership=un
membro suddivide i compiti e dirige il lavoro)
Per affrontare il lavoro è stata scelta una modalità collaborativa, ognuna di noi ha fornito il suo personale
contributo.