SIMOREG DC Master
Serie 6RA70
Applicazione
Note di progettazione,
hardware, software
e regolazione
Convertitori a microprocessore da 6kW a 1900kW
per azionamenti a velocità variabile in continua
Edizione 03
Edizione 03
02.02
NOTA
Questa documentazione applicativa non avanza la pretesa, di raccogliere tutti i dettagli o le varianti di
apparecchio o di prendere in considerazione ogni caso immaginabile di funzionamento o di impiego.
Se si necessita di ulteriori informazioni o se si verificano particolari problemi, che non siano stati trattati
esaurientemente nell‘ambito del proprio impiego, ci si rivolga alla Filiale Siemens locale.
Il contenuto di questa applicazione non è parte di trattativa precedente o contestuale, di accordo o di
diritto acquisito o che si possa anche modificare. Il corrispondente contratto di acquisto rappresenta il
totale obbligo del reparto azionamenti a velocità variabile A&D della SIEMENS. La sola garanzia
riconosciuta dal suddetto reparto è quella concordata tra le parti nel contratto di acquisto. Le condizioni di
garanzia contrattuali non vengono né ampliate, né modificate con le esecuzioni di questa documentazione
applicativa.
AVVERTENZA
Gli apparecchi riportati comprendono tensioni elettriche pericolose, parti di macchina rotanti
pericolose (ventole) e controllano parti meccaniche in rotazione (azionamenti). Se non si
seguono le avvertenze delle relative istruzioni di servizio, possono conseguire morte, gravi
lesioni corporali od ingenti danni materiali.
Su questi apparecchi deve lavorare solo personale qualificato, che prima abbia preso
confidenza con tutte le avvertenze di sicurezza contenute nelle istruzioni di servizio e con
quelle di montaggio, funzionamento e manutenzione.
Il funzionamento sicuro e senza problemi degli apparecchi presuppone un trasporto
appropriato, un adeguato immagazzinaggio, montaggio ed installazione, come pure accurato
service e manutenzione.
E’vietata la trasmissione o la copiatura di questi documenti, la
diffusione o l’utilizzazione del loro contenuto, se non espressamente
autorizzato. Per trasgressioni si richiederanno risarcimenti. Tutti i diritti
sono riservati, specialmente nel caso di brevetti e marchi registrati.
Abbiamo verificato la concordanza del contenuto della pubblicazione
con il software ed hardware descritti. Tuttavia non si possono escludere
scostamenti così da non essere in grado di fornire alcuna garanzia
sulla completa rispondenza. I dati di questa documentazione vengono
comunque regolarmente controllati e le necessarie correzioni sono
contenute nelle edizioni successive. Per ogni consiglio di miglioramento
siamo grati.
Siemens AG 2000 All rights reserved
SIMOREG ® è un marchio di fabbrica della Siemens
02.02
0
Edizione 03
Contenuto
Pagina
1
Campo d‘impiego ..................................................................................................4
2
La progettazione ...................................................................................................5
2.1
2.2
2.3
2.4
2.5
2.6
2.7
2.8
2.9
Motore in corrente continua................................................................................................................ 5
Convertitore SIMOREG DC-MASTER 6RA70.................................................................................... 6
Trasformatore per raddrizzatore......................................................................................................... 8
Bobina di commutazione .................................................................................................................... 8
Contattore principale........................................................................................................................... 9
Interruttore automatico ....................................................................................................................... 9
Fusibili per protezione di semiconduttori .......................................................................................... 10
Cavi................................................................................................................................................... 10
Filtro anti radiodisturbi ...................................................................................................................... 10
2.10
2.11
2.12
Coseno ϕ .......................................................................................................................................... 11
Armoniche lato rete .......................................................................................................................... 11
Impianto di rifasamento .................................................................................................................... 11
3
Un piccolo ABC dell‘hardware ...........................................................................12
3.1
3.1.1
3.1.2
3.1.3
3.1.4
3.1.5
3.2
L'elettronica a microprocessore........................................................................................................ 13
Ingressi ed uscite analogiche ........................................................................................................... 13
Ingresso generatore impulsi ............................................................................................................. 13
Interfacce seriali ............................................................................................................................... 14
Interfaccia motore............................................................................................................................. 14
Schede addizionali............................................................................................................................ 14
Rilevamento valore di misura nel SIMOREG DC Master 6RA70 .................................................... 15
4
Flessibilità software nell‘adattamento ..............................................................17
5
Grandezze di riconoscimento della regolazione ..............................................18
5.1
5.2
5.3
5.4
Circuito di regolazione di corrente .................................................................................................... 18
Circuito di regolazione di velocità ..................................................................................................... 18
Ottimizzazioni automatiche supportate nella messa in servizio........................................................ 18
Cicli di calcolo ................................................................................................................................... 18
Siemens AG
SIMOREG DC Master
3-20
Applicazione Note di progettazione, hardware, software e regolazione
Edizione 03
1
02.02
Campo d‘impiego
Gli apparecchi convertitori SIMOREG sono equipaggiati con comando e regolazione full digital e servono
all‘alimentazione di armatura e campo di azionamenti a velocità variabile in corrente continua.
Full digital con esperienza: convertitori in continua con regolazione digitale della SIEMENS, sono sul mercato
dal 1986. Da allora sono in servizio oltre 100 000 SIMOREG digitali; il convertitore digitale della SIEMENS si
è distinto quale azionamento in continua nel mondo in tutti campi dell‘industria, dalle gru, alle macchine per la
carta, per laminati plastici o laminatoi metallici.
Nello standard
•
•
•
•
•
Tensione di allacciamento nominale: 400, 460, 575, 690, 830 V
Corrente nominale del circuito d‘armatura: da 15 a 2000 A (con parallelo di SIMOREG fino a 12000 A)
Corrente nominale di campo da 3 a 40 A
Possibile funzionamento a 6 e 12 impulsi
Possibile corrente di campo maggiore di 40A con apparecchio separato 6RA70 / 1Q
Un campo elevato della tensione d‘ingresso ammissibile ed un software flessibile rendono inoltre gli
apparecchi all‘altezza di campi di impiego particolari.
Impieghi particolari
•
•
•
•
•
Alimentazione dell‘eccitazione di grossi generatori
Alimentazione di magneti di sollevamento
Alimentazione di sbarre in corrente continua regolate
Carica di gruppi di batterie
Alimentazione del circuito intermedio di grossi impianti di convertitori di frequenza
Per la progettazione degli apparecchi convertitori 6RA70 viene usato il catalogo DA21⋅1998. La seguente
documentazione applicativa dovrebbe rispondere a domande addizionali sulla progettazione e sulle
caratteristiche degli apparecchi.
4-20
SIMOREG DC Master
Siemens AG
Applicazione Note di progettazione, hardware, software e regolazione
02.02
2
Edizione 03
La progettazione
Le formule usate rappresentano in parte approssimazioni, che tuttavia sono nella maggior parte dei casi
sufficienti nella pratica per una rapida determinazione delle grandezze.
2.1
Motore in corrente continua
La progettazione incomincia con il dimensionamento del motore in corrente continua secondo il catalogo
DA12. In funzione della rete di alimentazione ed il tipo di funzionamento 1Q / 4Q (funzionamento ad uno e
quattro quadranti) si ricava la tensione nominale d‘armatura del motore, che rende possibile l‘ulteriore
dimensionamento del circuito d‘armatura.
Tensione nominale
armatura motore
Allacciamentoo rete
50/60 Hz
Schema
raddrizzatore
Tipo funzionamento
420 V
3AC 400 V
(B6)A(B6)C
4Q
470 V
3AC 400 V
B6C
1Q
520 V
3AC 500 V
(B6)A(B6)C
4Q
600 V
3AC 500 V
B6C
1Q
720 V
3AC 690 V
(B6)A(B6)C
4Q
810 V
3AC 690 V
B6C
1Q
Con tensioni di rete 415 / 440 / 460 / 480 V viene scelto il circuito d‘armatura successivo adatto.
L‘adattamento fine della velocità può avvenire con il campo motore. Con rilevanti scostamenti tra la tensione
nominale motore e la tensione d‘uscita dell‘alimentatore, è necessario interpellare il costruttore.
Nota: per motori SIEMENS fino alla grandezza 136 la tensione nominale ammissibile della rete di
alimentazione ammonta massimo a 440 V.
Un esempio di calcolo si trova nel capitolo seguente.
Quale tensione nominale per il campo del motore si consiglia 310 V. Poiché i convertitori 6RA70 dispongono
di un alimentatore di campo regolato integrato, è possibile anche il deflussaggio in funzione della velocità. Nel
campo di deflussaggio il motore funziona a potenza costante ed a coppia decrescente all‘aumentare della
velocità.
La relazione tra potenza nominale e coppia si ricava come segue:
M = (9549 * PN) / n
M: coppia del motore [Nm], PN: potenza nominale del motore [kW], n: velocità del motore [min ].
Per velocità fino alla nominale (campo variazione d‘armatura) come coppia vale la nominale del motore.
Tenere conto della sovraccaricabilità del motore secondo DA12.
-1
Spesso impianti esistenti con vecchi motori devono essere equipaggiati con convertitori più moderni.
A cosa si deve prestare attenzione in questo caso?
a) Poiché la maggior parte dei motori vecchi sono stati costruiti anche con margini di sicurezza, per
alimentazione a 6 impulsi solitamente non è indispensabile l‘impiego di una bobina di livellamento nel
circuito in corrente continua.
b) Con i nuovi motori moderni SIEMENS per andamenti dinamici sono ammissibili velocità di variazione di
corrente fino a 200 IN/s. Con motori vecchi si deve procedere più dolcemente. In aggiunta nel SIMOREG
6RA70 viene attivato l‘integratore del riferimento di corrente.
Parametrizzazione consigliata: tarare parametri P157 = 1, P158 = 0.040.
c) E se la tensione nominale del motore è decisamente più bassa, p.e. per 160 o 220 V e se questo deve
essere azionato direttamente tramite un convertitore su rete 400 V, si raccomanda prudenza.
Sebbene il valore medio della tensione d‘uscita possa essere regolata sul SIMOREG tra zero e tensione
d‘uscita nominale, come tensione di picco si ha la radice due del valore efficace della tensione di rete, ed
a 400 V di rete questo è pursempre 565 V. La domanda è se questo sia ammissibile per il collettore, il
costruttore del motore può dare una risposta. In caso di dubbio inserire un trasformatore di adattamento
all‘ingresso del SIMOREG. Il calcolo si ricava dai capitoli .
Siemens AG
SIMOREG DC Master
5-20
Applicazione Note di progettazione, hardware, software e regolazioe
Edizione 03
02.02
ATTENZIONE
Con motori a magneti permanenti SIEMENS dei tipi Type 1HU. Corrispondentemente alla tensione di
armatura nominale dei motori è necessario un trasformatore di adattamento a monte del convertitore
(valore indicativo per la tensione secondaria: Usec = Uarmat * 0,98).
Le caratteristiche dei motori SIEMENS sono:
-
elevata densità di potenza nella serie costruttiva compatta
elevata sicurezza di funzionamento e disponibilità: tempi di durata spazzole fino a 15000 ore
grande dinamica: tempo di attivazione della coppia sotto i 10 ms nel funzionamento su SIMOREG
elevate coppie limite dinamiche per i brevissimi tempi di inversione
eccellente rotondità di rotazione: ondulazione di coppia sotto l‘1% a 50/min
di semplice manutenzione, contesto di diagnosi con bus in connessione con 6RA70
sistema modulare per adattamento ai desiderata del cliente
2.2
Convertitore SIMOREG DC-MASTER 6RA70
Il SIMOREG è un convertitore che richiede la presenza di una tensione di rete per la commutazione della
corrente, non è possibile un mantenimento del flusso di corrente al mancar della tensione di rete (p.e. per
brevi interruzioni).
Con gli apparecchi a quattro quadranti ed alimentazione di recupero al mancar della tensione di rete o per
notevole abbassamento della stessa si può verificare l‘intervento dei fusibili (errore di commutazione
invertitore). Questo è un effetto fisico di commutazione del convertitore, che non può essere impedito dalla
regolazione. L‘alimentazione avviene in corrente alternata monofase (per circuito di campo) / trifase (per
circuito d‘armatura), non è possibile il funzionamento della parte di potenza su una rete in corrente continua.
Il SIMOREG 6RA70 è sovraccaricabile per breve tempo fino a 1,8 volte, se l‘apparecchio in precedenza è
stato usato con una corrente di carico base minore della sua corrente nominale. Non è possibile alcun
sovraccarico se l‘apparecchio funziona per un intervallo di tempo più lungo con la sua corrente nominale.
Inoltre nel convertitore viene calcolato lo stato termico dei tiristori per garantire una protezione del
semiconduttore di potenza. Se si raggiungono i limiti termici per sovraccarico, si ha a scelta o una riduzione
automatica della corrente dell‘apparecchio o uno sgancio con segnalazione di guasto. La progettazione del
sovraccarico si ricava dal catalogo DA21, opp. dalle istruzioni di servizio.
Campo di tensione nominale ammissibile della rete di alimentazione
Il campo della tensione d‘ingresso ammissibile dipende dalla tensione nominale di allacciamento
dell‘apparecchio 6RA70. Per tensioni di rete 480V / 500V / 575V sono usati apparecchi con tensione
nominale di allacciamento 575 V. Per tensione bassa da 15 a 85 V in ingresso è disponibile l‘opzione
hardware L04.
Tensione di allacciamento nominale 6RA70
Campo tensione nominale della
rete di alimentazione
Circuito d'armatura 400V
3AC 85 - 415 V
Circ.armatura 400/460/575 V con opzione L04
3AC 15 - 85 V
Circuito d'armatura 460 V
3AC 85 – 460 V
Circuito d'armatura 575 V
3AC 85 – 575 V
Circuito d'armatura 690 V
3AC 130 – 690 V
Circuito di campo
2AC 85 – 460 V
PRECAUZIONE
Nel funzionamento a 4Q con recupero in rete la tensione di rete deve sempre essere più alta della
tensione del motore / 1,17, altrimenti si verifica guasto nell‘inversione con intervento dei fusibili.
6-20
SIMOREG DC Master
Siemens AG
Applicazione Note di progettazione, hardware, software e regolazione
02.02
Edizione 03
Tensione in continua d‘uscita del SIMOREG
La tensione d‘uscita nominale inserita nei dati tecnici vale per tensione di allacciamento nominale meno il
5%. Si è già tenuto conto quindi di una certa riserva per coprire nel funzionamento abbassamenti di tensione
della rete di alimentazione.
E‘ possibile una calcolazione più precisa della tensione d‘uscita con le relazioni che seguono.
Circuito d'armatura:
Schema 4Q (B6)A(B6)C:
Uuscita DC = Uingr.SIMOREG * 1,35 * cos 30° = Uingr.SIMOREG * 1,17
Uuscita DC = Uingr.SIMOREG* 1,35 * cos 5° = Uingr.SIMOREG * 1,34
Schema 1Q B6C:
Circuito di campo:
Schema B2HZ:
Uuscita DC = Uingr.SIMOREG * 0,9
Per tensioni nominali di campo tra 180 e 340 V (normalmente 310 V) è prevista una tensione di
alimentazione del convertitore di 400 V (eccezione con motori più vecchi), per tensione nominale di campo
del motore si consiglia un trasformatore di adattamento lato alimentazione.
Nota: quale Uingr.SIMOREG viene usata la tensione di rete meno la caduta di tensione della bobina di
commutazione (normalmente 4% della tensione di rete).
Uuscita DC : tensione d‘uscita calcolata del SIMOREG.
Impiegando un trasformatore di adattamento si deve tenere conto di alcuni % come riserva di tensione.
Esempio di calcolo:
Dati d‘impianto: tensione nominale di rete 415 V, caduta di tensione della bobina di commutazione 16 V
funzionamento a 4Q,
Uingr.SIMOREG = 415 - 16 = 399 V
Uuscita DC = 399 * 1,17 =467 V
Quale circuito d'armatura per il motore deve essere scelto il corrispondente con 470 V.
Per avere anche riserva con abbassamento di tensione, si consiglia di introdurre la tensione nominale di
motore di 440 V (parametro P101).
La velocità del motore a 440 V riferita a 470 V può essere ricalcolata linearmente (la velocità nel campo di
variazione d‘armatura è proporzionale alla tensione del motore). La velocità nominale può essere di nuovo
raggiunta con un piccolo deflussaggio.
Si deve tenere conto di una riserva dovuta a: abbassamenti di tensione in rete durante il funzionamento e
come conseguenza di altri utilizzatori, caduta di tensione sui cavi, caduta di tensione R*I nel motore più alta
con le correnti di accelerazione.
Siemens AG
SIMOREG DC Master
7-20
Applicazione Note di progettazione, hardware, software e regolazioe
Edizione 03
02.02
Potenze dissipate nel SIMOREG
Perdite indipendenti dalla potenza
Alimentazione
ca. 200 W
Ventilatore apparecchio
ca. 750 W per apparecchi da 400 a 850 A
ca. 570 W per > 850 A
Perdite dipendenti dalla potenza
Circuito d'armatura
3 V x la corrente d‘armatura
Circuito di campo
3 V x la corrente di campo
Perdite totali
Somma di tutte le suddette perdite
Potenza emessa: tensione continua x corrente continua d‘armatura
Potenza assorbita: potenza emessa + perdite
Rendimento: potenza emessa ÷ potenza assorbita.
2.3
Trasformatore per raddrizzatore
Il calcolo della potenza apparente del trasformatore per raddrizzatore per il circuito d'armatura avviene
secondo la formula seguente:
S = 1,35 * Urete secondaria * corrente continua * 1,05
Per il circuito di campo
S = Urete secondaria * corrente continua
2.4
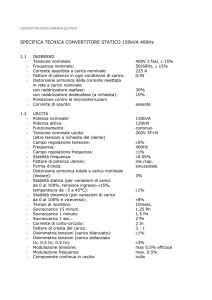
Bobina di commutazione
Per la limitazione dei buchi di commutazione nella tensione di rete sono sempre necessarie induttanze al lato
rete degli apparecchi SIMOREG K, che devono perciò essere preceduti da bobine di commutazione in serie.
La caduta di tensione induttiva necessaria in questo caso può essere riferita, come la tensione di
cortocircuito del trasformatore, alla tensione di rete e data come caduta di tensione relativa della stessa.
Il valore minimo della tensione di cortocircuito del trasformatore o della caduta di tensione relativa della
bobina di commutazione riguardo ai buchi di commutazione consentiti nella rete di alimentazione deve essere
del 4%, affinché con un rapporto della potenza di allacciamento del convertitore rispetto alla potenza di
cortocircuito della rete dell‘1%, i buchi di commutazione non superino il 20% secondo VDE 0160. Questo
significa anche che con reti deboli nel caso si debba aumentare l‘induttanza delle bobina di commutazione
(p.e. due bobine in serie).
S
~
rete
X
k
N
X
t
convertitore
installazione
convertitore
8-20
SIMOREG DC Master
Siemens AG
Applicazione Note di progettazione, hardware, software e regolazione
02.02
Edizione 03
XN : reattanza di rete, Xt : reattanza trasformatore, Un : tensione nominale di rete
Sk : potenza di cortocircuito della rete nel luogo di installazione del convertitore
Ps : potenza di allacciamento del convertitore
Caduta di tensione nella rete di alimentazione al punto Sk:
∆U / Un = XN / (XN + Xt) deve ≤ 0,2
∆U / Un = 1 / (1 + uk * Sk / Ps)
uk è la tensione di cortocircuito relativa del trasformatore per raddrizzatore o della bobina di commutazione
(normalmente 0,04 = 4%).
Una rete può essere considerata come robusta se Ps / Sk ≤ 0,01. Su rete robusta usare bobine al 4%.
Quando si può rinunciare alla bobina di commutazione: se un convertitore deve funzionare su un
trasformatore per raddrizzatore (come unico carico) con una uk ≥ 4%. Gli autotrasformatori hanno una uk
minima, perciò in questo caso è indispensabile una bobina di commutazione addizionale.
Quando si deve sempre impiegare una bobina di commutazione: se più apparecchi convertitori vengono fatti
funzionare su un trasformatore si devono prevedere per ognuno bobine di commutazione separate.
Nella scelta delle bobine di commutazione secondo catalogo DA93.1 si può procedere come segue:
poiché sia il motore che la bobina di commutazione sono sovraccaricabili per breve durata, il
dimensionamento della corrente della bobina nel circuito d'armatura avviene sulla corrente nominale del
motore. La corrente nominale della bobina trifase è la corrente nominale del motore x 0,82. In questo caso si
cerca dalla tabella per una bobina all‘80% il tipo adatto.
La bobina per il circuito della corrente di campo è dimensionata sulla corrente nominale del campo del
motore (bobina monofase).
Nota: con frequenza di rete 60 Hz, dimensionare per un 10% in più.
2.5
Contattore principale
L‘impiego di un contattore principale non è prescritto obbligatoriamente (in funzione dell‘utilizzazione).
Adoperando il contatto di relé morsetto 109/110 dell‘apparecchio SIMOREG per il controllo del contattore
principale, si garantisce che nel funzionamento normale il contattore venga attratto e rilasciato senza
corrente. In caso di guasto tuttavia si possono verificare sovraccorrenti con componenti in continua.
2.6
Interruttore automatico
Nello schema a blocchi dell‘apparecchio SIMOREG sono indicati interruttori automatici per l‘alimentazione
dell‘elettronica e del campo.
Questi vengono dimensionati per protezione conduttore. In alternativa la protezione del conduttore può
essere raggiunta con altre misure.
Siemens AG
SIMOREG DC Master
9-20
Applicazione Note di progettazione, hardware, software e regolazioe
Edizione 03
2.7
02.02
Fusibili per protezione di semiconduttori
Per la protezione dei tiristori sono prescritti fusibili di protezione semiconduttori (vedi catalogo DA21 opp.
istruzioni di servizio).
PRECAUZIONE
Non sono coperti da garanzia danni all‘apparecchio che si verifichino per impiego di fusibili non consentiti.
I fusibili di protezione semiconduttori prescritti non sono adatti alla protezione dei conduttori
conl‘eccezione del tipo 3NE1 che è adatto anche per protezione di conduttori. In aggiunta alla protezione
di semiconduttori si devono prendere misure per la protezione dei conduttori p.e. con fusibili per la loro
protezione.
I seguenti fusibili per protezione di semiconduttori sono adatti anche per la protezione di conduttori alle
condizioni che seguono:
Tipo:
fusibile protezione di
semiconduttori
Il conduttore deve essere
dimensionato per la corrente
minima seguente
5SD420
15 A
5SD440
22 A
5SD480
26 A
3NE8015
27 A
3NE8003
36 A
3NE4102
36 A
2.8
Cavi
I cavi del motore sono dimensionati sulla corrente continua. Nel circuito di alimentazione del circuito
d‘armatura scorre la corrente di motore per 0,82.
Nell‘alimentazione di campo la corrente continua è uguale alla corrente d‘alimentazione.
Cavo di protezione: il cavo di protezione deve essere dimensionato per radice tre volte la corrente di
alimentazione per il caso di guasto. Impiegando un controllo verso contatto a terra si può ridurre la sezione
del cavo di protezione.
Nota: sul SIMOREG non sono consentiti salvamotori FI.
2.9
Filtro anti radiodisturbi
Se deve essere mantenuta la Norma EN55011 classe A1, sono sempre indispensabili bobine di
commutazione e filtri anti radiodisturbi. Il dimensionamento secondo la corrente del filtro anti radiodisturbi si
ha come per la bobina di commutazione. Con rete a 400 V possono essere riportate più utenze attraverso un
filtro (circuito d'armatura, circuito di campo, alimentazione ausiliaria) e per il dimensionamento del filtro viene
calcolata la corrente totale per le utenze.
Ulteriori note si ricavano dalle istruzioni di servizio opp. dal catalogo DA21.
10-20
SIMOREG DC Master
Siemens AG
Applicazione Note di progettazione, hardware, software e regolazione
02.02
2.10
Edizione 03
Coseno ϕ
Poiché per il convertitore SIMOREG K si tratta di un raddrizzatore regolato subentra potenza reattiva di
regolazione e potenza reattiva di commutazione. Il cosϕ per il circuito d'armatura a seconda della velocità del
motore può stare tra zero e ca. 0,9. Poiché con schemi di raddrizzamento ci sono correnti non sinusoidali la
determinazione delle potenze è piuttosto complessa.
Con corrente continua completamente livellata per le potenze della componente fondamentale valgono le
seguenti relazioni:
S1 = Udi * Id, P = P1 = Udi * Id * cosα, Q1 = Udi * Id * senα. cosϕ1 = cosα.
La potenza reattiva è sempre induttiva.
Per la pratica il cosϕ può essere determinato approssivamente secondo la relazione seguente:
cosϕ ≅ Ud / Udi = Umotore / (1,35 *Urete)
Esempio di calcolo:
Dati:
motore 1GG6164-0JF40-6WV5, tensione nominale d‘armatura 470 V, velocità nominale 1800 / min, corrente
nominale 171 A, tensione di rete 400 V
a) Alla velocità nominale:
cosϕ ≅ 470 / (1,35 * 400) = 0,87
b) A 900 / min:
nel campo variazione armatura velocità e tensione del motore sono proporzionali, perciò a metà della
velocità metà tensione motore.
cosϕ ≅ (470 / 2) / (1,35 * 400) = 0,44
c) A 2500 / min:
il motore è nel campo di deflussaggio, la tensione continua è costante (tensione nominale motore), calcolo
come per a).
2.11
Armoniche lato rete
Si verificano armoniche per il fatto che il convertitore carica la rete con blocchi di corrente rettangolari più o
meno marcati. La scomposizione della corrente di rete nelle sue componenti di frequenza crea la
componente fondamentale e le armoniche.
Nelle istruzioni di servizio del convertitore opp. nel catalogo DA21 è dato un esempio di calcolo.
Per precisa conoscenza dei dati di rete e motore (potenza di cortocircuito della rete, dati della bobina di
commutazione, induttanza e resistenza motore, dati trasformatore e punto di funzionamento del motore) può
essere eseguita una calcolazione delle armoniche lato rete.
In impianti di convertitori complessi si deve completare la misurazione delle armoniche.
2.12
Impianto di rifasamento
Tutti i convertitori provocano effetti di ritorno in rete. Il prevedere misure anti disturbo in rete è compito del
gestore della rete stessa. Per una calcolazione sulla rete deve essere nota la conoscenza della tipologia della
rete e la sua possibile variazione. Un grossolano equipaggiamento delle reti con circuiti di compensazione,
specialmente con apparecchiature di rifasamento senza bobine, non porterà nella maggior parte dei casi ad
alcuna miglioria, ed in certi casi aumenta la sensibilità alla risonanza delle reti. Nell‘accertamento delle
correnti armoniche non si può semplicemente partire dalla somma delle correnti dei singoli convertitori (è
minore della somma). Nella pratica con impianti complessi si ritorna ad una misurazione delle correnti
armoniche. Per soddisfare a domande sulla responsabilità, il gestore della rete deve essere rimandato dal
costruttore del convertitore alla presenza di correnti armoniche superiori.
Siemens AG
SIMOREG DC Master
11-20
Applicazione Note di progettazione, hardware, software e regolazioe
Edizione 03
3
02.02
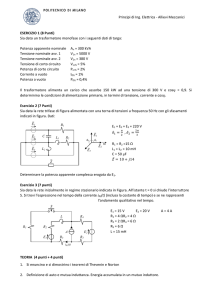
Un piccolo ABC dell‘hardware
Ingressi
Uscite
210
P24_S
1)
S_IMP
Rx+/Tx+
BA
211
ingressi a scelta
binari
212
T/R
Rx-/TxRx+/Tx+
213
BA
214
215
R/T
Rx-/Tx-
BA
204
temperatura
motore
Clk
M
X161
KTY84 / PTC
8
9
Rx+/Tx+
BA
Rx-/Tx-
X166
Tx+
61
Tx-
62
+ Rx+/Tx+
63
Rx-/Tx-
64
X164
205
#
BA
X164
M
#
M
#
RS485
M
BA
M
X162
10
11
A
45
P24_S
1)
D
A
M
X164
M
40
41
ingressi a scelta
binari
M
X163
CUD2 (opzionale)
2
3
51
52
M
X163
53
CUD1
M
Tx+
56
Tx-
57
+
Rx+/Tx+
58
Rx-/Tx-
59
P24
C98043-A7006
X110 / X111
X110 / X111
P10 ± 1% / 10 mA
BA
N10 ± 1% / 10 mA
4
U/I
5
#
M
RS485 BA
M
X172
6
U/I
7
KTY84 / PTC
M
34
35
D
#
23
P24_S
M
regolazione
comando
per armatura
e campo
1)
A
M
X175
M
M
P15
200mA max.
corrente armatura
28
>
&
COMP
X>Y
29
X171
tach.analog. #
commut.
5/15V
=
26
M
54
∼
X171
traccia 1
47
48
M
P24
39
27
17
46
M
37
38
alimentaz.
15
16
D
36
marcia / arresto
sblocco servizio
13
14
A
M
X174
60
12
I-ist
#
22
24
21
50
43
1
19
20
M
42
10k
riferimento
principale
65
18
D
M
44
interfaccia
collegamento
in parallelo
Rx-/Tx-
216
217
X165
Rx+/Tx+
RS232 / RS485 zu X300
X109
30
traccia 2
>
COMP
X>Y
31
32
zero
>
COMP
X>Y
33
X107
X173
C98043-A7001
TB e schede CB
CUD1: Elettronica microprocessore: una variante per l‘intera serie costruttiva
CUD2: Opzione estensione morsetti
12-20
SIMOREG DC Master
Siemens AG
Applicazione Note di progettazione, hardware, software e regolazione
02.02
3.1
Edizione 03
L'elettronica a microprocessore
Sulla base di un sistema a due processori il potente microcontrollore della famiglia C166 della SIEMENS, con
tasteggio a 48 MHz, è il cuore della regolazione. Un C163 è sincronizzato opp. accoppiato con un C167
tramite una Dual Port RAM. Si tratta di un microcontrollore potente, il cui set di comando è stato ottimizzato
sulla veloce reazione ad eventi esterni. Ad un chip sono state implementati in aggiunta al microprocessore
schemi periferici „intelligenti“, per aumentare la flessibilità dell‘intero controllo.
Un controllore della famiglia C166 si compone dei seguenti blocchi funzionali: un microprocessore di elevata
potenza, un sistema interrupt completamente programmabile, canali di introduzione / emissione
universalmente inseribili ed elaborati indipendentemente l‘uno dall‘altro, schemi periferici intelligenti.
Le caratteristiche più importanti di C163 opp. C167:
• Ciclo di esecuzione comando di 83 ns per 24 MHz di tasteggio interno,
moltiplicazione opp. divisione 16 bit in 0,416 o 0,83 µs
• La maggior parte dei comandi sono eseguiti entro un singolo ciclo,
• Umfassende Bitmanipulationen, Befehle für leistungsfähige Programmverzweigung
• Comando bus flessibile tramite caratteristiche programmabili, dipendenti dall‘indirizzo
• Trasduttore analogico/digitale a 16 canali 10 bit (-> solo C167!)
• Cinque temporizzatori 16 bit con inserzione per rilevamento del tempo e confronto
• Elevata sicurezza di sistema con Watchdog
• Due interfacce seriali integrate
Un blocco ASIC (blocco specifico per cliente) supporta il microcontrollore per:
• 4 canali per conversione A/D ad alta risoluzione con 14 bit più segno
• valutazione generatore impulsi con due tracce e tacca di zero per fino a frequenza impulsi 300kHz
3.1.1
Ingressi ed uscite analogiche
• Valore reale di velocità analogico con 14 bit più il segno, tempo di conversione 1,15 ms
• 2 ingressi analogici tramite amplificatore differenziale con 14 bit più il segno.
La risoluzione per il riferimento principale (morsetto 4/5) è impostabile con P707:
11 bit più segno tempo di misura 0,53 ms
12 bit più segno tempo di misura 0,95 ms
13 bit più segno tempo di misura 1,81 ms
14 bit più segno tempo di misura 3,51 ms
• 2 ingressi analogici con 10 bit più segno
• 4 uscite analogiche con 11 bit più segno
• un‘uscita analogica diretta di tempo reale per il valore reale di corrente p.e. per allacciamento ad un
registratore
3.1.2
Ingresso generatore impulsi
Si consigliano generatori d‘impulsi con due tracce spostate di 90° (per 1Q possibile anche una traccia, scelta
con P140). Una tacca di zero viene suggerita se è desiderato un valore reale di posizione (contatore
hardware 24 bit, connettore K0043 High-word, K0042 Low-word, K0044 numero di tacche di zero).
Il rilevamento avviene tramite amplificatore differenziale (attenzione allacciare anche il collegamento meno
alla massa o alla traccia trasversale).
Per generatori d‘impulsi HTL l‘alimentazione di tensione può avvenire dal SIMOREG. Generatori 5V (TTL)
richiedono un‘alimentazione separata. Il campo della tensione d‘ingresso è sceglibile con parametro P142.
Sono da preferire 1024 o più impulsi al giro. Il tempo di misura di valutazione è selezionabile da 1 a 4 ms. Per
tempo di misura più lungo – migliore rotazione alle velocità basse.
La velocità misurabile minima con un generatore d‘impulsi è in funzione del numero di tratti del generatore
d‘impulsi:
nmin [U/min] = 14648 / (X * numero tratti)
Siemens AG
SIMOREG DC Master
13-20
Applicazione Note di progettazione, hardware, software e regolazioe
Edizione 03
02.02
La velocità massima misurabile con un generatore d‘impulsi è:
nmax [g/min] = 18 000 000 / tratto
X = 1 o 2 o 4 per valutazione semplice, doppia o quadrupla.
In funzione della velocità minima/massima desiderata è determinato il numero di tratti (numero di impulsi) del
generatore d‘impulsi (1024 impulsi al giro sono i più adatti).
3.1.3
Interfacce seriali
L‘apparecchio base SIMOREG dispone di due interfacce seriali. Una terza interfaccia seriale si trova
sull‘estensione morsetti CUD2.
Sul pannello di comando dell‘apparecchio si trova il connettore X300 con un‘interfaccia a scelta RS232 o
RS485 per il protocollo USS. L‘interfaccia RS232 consente un accoppiamento punto a punto per
l‘allacciamento ad un PC, con cui nella maggior parte dei casi viene eseguita la messa in servizio da menue
con SIMOVIS. L‘interfaccia RS485 è adatta per un collegamento di bus degli apparecchi all‘automazione o ad
un PC (necessario convertitore lato PC) o per l‘allacciamento di un OP1S.
Baudrate massime: 19,2 kBd per RS232 e 187,5 kBd per RS485.
Sulla CUD1 e CUD2 è presente un‘interfaccia RS485 ciascuna (a quattro o due fili) che può essere usata per
il protocollo USS o Peer To Peer.
3.1.4
Interfaccia motore
Le possibilità dell‘interfaccia motore sulla CUD2 sono descritte nel catalogo DA21.
3.1.5
Schede addizionali
La scheda tecnologica T400 e la scheda di interfaccia CBP vengono accoppiate tramite una Dual Portram.
Per ulteriori informazioni vedi catalogo DA21.
14-20
SIMOREG DC Master
Siemens AG
Applicazione Note di progettazione, hardware, software e regolazione
02.02
3.2
Edizione 03
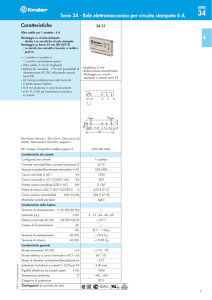
Rilevamento valore di misura nel SIMOREG DC Master 6RA70
5W1
5U1
1U1 1V1 1W1
3U1 3W1
1)
2)
=
~
3)
=
6)
9)
~
8)
10)
5)
4)
7)
~
~
~
~
~
~
11)
12)
A)
=
=
13)
16)
15)
f
u
Interfaccia per
l'elettronica a
microprocessore
Siemens AG
SIMOREG DC Master
F)
14)
3D 3C
campo
1C1 1D1
armatura
15-20
Applicazione Note di progettazione, hardware, software e regolazioe
Edizione 03
02.02
5U1/5W1: allacciamento alimentazione elettronica, fase a piacere
3U1/3W1: alimentazione di campo, fase a piacere
1U1/1V1/1W1: alimentazione circuito d‘armatura, sequenza fasi a piacere
3C/3D: allacciamento per campo motore
1C1/1D1: allacciamento per armatura motore
A) parte di potenza armatura , schema B6C per 1Q, schema (B6)A(B6)C per 4Q
B) parte di potenza campo, schema B2HZ
1)
2)
3)
fusibile alimentazione ausiliaria 1A semiritardato nr. ordinazione 6RY1702-0BA00
dispositivo alimentatore con separazione galvanica
tensioni in continua: P5, P15, P24, N15
4)
5)
trasduttore sulle fasi U/W per la misura della corrente d‘armatura e separazione galvanica
resistenze di carico per il trasduttore di corrente con max. 1V di caduta di tensione alla corrente
nominale. L‘adattamento fine della corrente nominale del convertitore si ha con il software senza perdita
di risoluzione.
L‘adattamento del carico avviene con gradini del 10% tramite parametro P76.
6)
per il raddrizzamento elettronico del valore reale di corrente sulla scheda dell‘elettronica,
risoluzione 10 bit alla corrente nominale.
7)
8)
9)
misura della tensione ad alta impedenza con amplificatore differenziale nel circuito d‘armatura.
riproduzione delle 3 fasi
al trasduttore A/D, misura della tensione e sincronizzazione trifase
10) misura della tensione ad alta impedenza per sincronizzazione nel circuito di campo con amplificatore
differenziale ed analisi con trasduttore A/D.
11) separazione galvanica per impulsi d‘accensione del circuito d‘armatura da trasmettitore di impulsi.
12) amplificatore differenziale ad alta impedenza per la misura della tensione d‘armatura, nel funzionamento
senza tachimetrica con regolazione EMK.
13) separazione galvanica per impulsi d‘accensione del circuito di campo da trasmettitore di impulsi.
14) resistenza shunt per misura della corrente di campo. L‘adattamento di carico avviene con parametro P76
a gradini del 10%.
15) conversione tensione / frequenza per rilevamento valore di misura.
16) trasmettitore per frequenza di misura per la separazione galvanica.
16-20
SIMOREG DC Master
Siemens AG
Applicazione Note di progettazione, hardware, software e regolazione
02.02
4
Edizione 03
Flessibilità software nell‘adattamento
Il software è realizzato modularmente e tramite i parametri dispone di illimitate possibilità di connessione. I
moduli software disponibili sono descritti nel catalogo DA21 e nelle istruzioni di servizio dei SIMOREG.
Ad una connessione libera dei moduli software provvedono binettori e connettori.
Siemens AG
SIMOREG DC Master
17-20
Applicazione Note di progettazione, hardware, software e regolazioe
Edizione 03
5
02.02
Grandezze di riconoscimento della regolazione
La regolazione lavora quale regolazione di velocità con regolazione di corrente subordinata.
5.1
Circuito di regolazione di corrente
Per il raggiungimento di dinamica elevata al regolatore di corrente PI è inserita una preregolazione in
parallelo. Dall‘EMK e dal riferimento di corrente la preregolazione calcola l‘angolo di controllo necessario ed
ha effetto quale canale veloce parallelo per la regolazione di corrente. Il regolatore di corrente con la sua
caratteristica PI è valido per procedure più lente.
Il tempo di intervento per la regolazione di corrente è di ca. 6,6 ms. Statisticamente si può avere un tempo
morto addizionale di 3,3 ms a 50 Hz. La frequenza limite per la regolazione di corrente è di 47,5 Hz.
5.2
Circuito di regolazione di velocità
Il regolatore di velocità è un regolatore PI con componente D nel canale del valore reale.
Il tempo di intervento è di 25 ms, la frequenza limite per il regolatore di velocità è 24 Hz.
5.3
Ottimizzazioni automatiche supportate nella messa in servizio.
La scelta dell‘ottimizzazione avviene con il parametro P051.
P051 = 22 aggiustamento offset interno
P051 = 25 preregolazione e regolatore di corrente (armatura e campo)
P051 = 26 regolatore di velocità
P051 = 27 regolazione deflussaggio (caratteristica di campo e regolatore EMK)
P051 = 28 compensazione di attrito e momento d‘inerzia.
L‘ottimizzazione del regolatore avviene secondo i seguenti criteri:
Regolatore di corrente d‘armatura dopo l‘optimum dell‘ammontare.
Regolatore di corrente di campo dopo l‘optimum simmetrico.
Regolatore di velocità dopo l‘optimum simmetrico.
Regolatore EMK dopo l‘optimum simmetrico.
Il circuito di regolazione di corrente deve sempre essere ottimizzato automaticamente, non è necessario un
adattamento manuale.
Il regolatore di velocità nei seguenti casi deve essere riottimizzato a mano:
Forte gioco del riduttore
Azionamenti a cinghia con elevati momenti d‘inerzia
Meccanica che produca vibrazioni
Processi che non ammettano un‘elevata dinamica.
5.4
Cicli di calcolo
Tra due impulsi di accensione che sono 3,3 ms a 50 Hz vengono calcolate le seguenti funzioni:
Regolazione di corrente d‘armatura, regolazione di velocità, regolatore tecnologico, motopotenziometro,
formazione riferimento, datore di rampa, ingressi analogici, uscite analogiche, uscite binarie, interfacce.
In 6,6 ms a 50 Hz:
Ingressi binari
In 10 ms a 50 Hz:
Regolazione EMK e corrente di campo
A 60 Hz i cicli di calcolo sono più corti del 20%.
La parametrizzazione avviene nel ciclo di 20 ms.
18-20
SIMOREG DC Master
Siemens AG
Applicazione Note di progettazione, hardware, software e regolazione
02.02
Siemens AG
SIMOREG DC Master
Edizione 03
19-20
Applicazione Note di progettazione, hardware, software e regolazioe
Edizione 03
Siemens AG
Elektronikwerk Wien
Postfach 83, A-1211 Wien
Siemens Aktiengesellschaft
02.02
© Siemens AG, 2000
Con riserva di modifiche
SIMOREG DC Master Applicazione
Note di progettazione, hardware, software e
regolazione
Printed in Austria