Facoltà di Studi Classici, Linguistici e della Formazione
SCIENZE DELLA FORMAZIONE PRIMARIA (LM-85 bis)
Lucia Quattrocchi
Didattica delle scienze (FIS/01)
8CFU
Dinamica
La dinamica è il ramo della meccanica che si occupa
dello studio del moto dei corpi e delle sue cause o meglio
delle circostanze che lo determinano e lo modificano
Forza
Il concetto primitivo di forza è insito nello sforzo muscolare che
si compie ogni volta che vogliamo spingere , tirare impedire il
moto o deformare un corpo
La FORZA è tutto ciò che determina il cambiamento
dello stato di quiete o di moto di un corpo.
È UNA
GRANDEZZA
VETTORIALE!
DIREZIONE
PUNTO DI APPLICAZIONE
VERSO
QUANTO È LUNGA LA FRECCIA/VETTORE MI DICE
L’INTENSITÀ DELLA FORZA
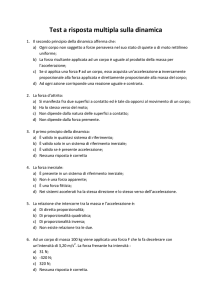
Nella figura una
donna sta
spingendo una cassa
con una
Forza che ha un
modulo F che forma
con la direzione
di spostamento un
angolo di 30°.
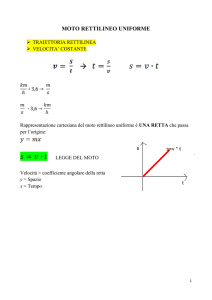
COMPOSIZIONE DI FORZE
Cosa succede se a un corpo applichiamo
più forze?? Devo sommare i vari effetti
delle forze e trovare la forza totale,
detta RISULTANTE.
COMPOSIZIONE DI FORZE: VARI CASI
APPLICO FORZE CON STESSA DIREZIONE E STESSO
VERSO
RISULTANTE
•la direzione rimane
quella delle forze di
partenza
• il verso rimane quello
delle forze di partenza
• l’intensità è data
dalla somma delle due
intensità delle forze
iniziali
FORZA 1 = F1
FORZA 2 = F2
RISULTANTE = R = F1 + F2
COMPOSIZIONE DI FORZE: VARI CASI
APPLICO FORZE CON STESSA DIREZIONE MA
VERSO OPPOSTO
RISULTANTE
•la direzione rimane
quella delle forze di
partenza
• il verso sarà quello
della forza iniziale
maggiore
• l’intensità è data
dalla differenza tra le
due intensità delle
forze iniziali
FORZA 1 = F1
FORZA 2 = F2
RISULTANTE = R= F2 - F1
COMPOSIZIONE DI FORZE: VARI CASI
APPLICO FORZE CON DIREZIONE E VERSO
DIVERSI
RISULTANTE
Devo applicare la regola del
PARALLELOGRAMMA, cioè
costruire un parallelogramma che
abbia per lati le due forze. La
risultante sarà rappresentata
dalla diagonale del
parallelogramma.
FORZA 1 = F1
FORZA 1 = F1
RISULTANTE = R
FORZA 2 = F2
FORZA 2 = F2
LE FORZE SONO VETTORI
Le Forze sono grandezze vettoriali, sono quindi definite da:
intensità o modulo;
direzione;
verso;
punto di applicazione.
e si compongono come i vettori. Il vettore ottenuto dalla
composizione di tutte le forze in gioco si chiama
RISULTANTE delle FORZE.
Se la risultante è nulla il corpo si trova in EQUILIBRIO.
I Principi della dinamica
La fisica moderna deve la sua origine all’opera di
Galileo e principalmente all’opera di Newton, che
nei Principia Mathematica enuncia le leggi della
dinamica oltre che la legge di gravitazione
universale..
Le cause del moto
Secondo l’intuizione fondamentale di
Galileo e Newton le forze producono
una variazione dello stato di moto
ovvero un’accelerazione
Principi della dinamica
Prima principio della dinamica o legge d’inerzia:
Ogni corpo rimane nel suo stato di quiete o di moto rettilineo
uniforme a meno che non agisca su esso una forza risultante
diversa da zero.
I sistemi di riferimento in cui vale tale legge vengono detti
sistemi inerziali. Si definisce sistema inerziale un sistema avente
accelerazione nulla (ovvero un sistema in quiete o in moto con
velocità costante). la tendenza di un corpo a mantenere il
proprio stato di quiete o di moto in assenza di forze applicate si
chiama INERZIA
L’inerzia
In realtà il concetto di inerzia, fu introdotto da Galileo, che ipotizzò
l’esistenza di una forza, la forza d’attrito, come responsabile dell’arresto
del moto degli oggetti. Le sue esperienze si servivano di piani inclinati
posti uno di fronte all’altro come in Figura. Galileo osservò che una
pallina scende da un piano inclinato e sale sull’altro
l’inerzia è la tendenza di un oggetto
a resistere alle variazioni
del suo stato di moto!
Quindi è la sua tendenza a resistere
all’accelerazione.
Questo significa che riducendo sempre pi`u l’inclinazione del piano inclinato di
destra, la pallina percorrer`a distanze sempre maggiori, fino ad arrivare al
caso in cui, in assenza di attrito, la pallina continua nel suo stato di
moto a velocità costante.
Principi della dinamica
Primo principio della dinamica o legge d’inerzia
Sistemi inerziali
Qualunque sistema di riferimento
in moto rettilineo uniforme
rispetto ad un riferimento inerziale
è un sistema inerziale
Sistema di riferimento inerziale:
un sistema in cui è valido il
primo principio di Newton
Un sistema fisso o in moto rettilineo uniforme rispetto alle “stelle fisse”
(solidale con il Sole e le stelle) è un sistema di riferimento inerziale
tuttavia
La Terra ruota intorno al proprio
asse e intorno al Sole, perciò un
sistema fisso rispetto alla Terra non
è un sistema inerziale
Nella maggior parte delle situazioni
sarà possibile trascurare queste
piccole accelerazioni e
considereremo inerziale un sistema
solidale con la Terra
Primo principio della dinamica o legge d’inerzia
Conseguenze:
1) Il moto non deve essere alimentato
2) Possibilità “teorica” del “moto perpetuo” se si eliminassero
totalmente gli attriti
Es. un astronave nello spazio intergalattico si muove con
velocità uniforme all’infinito
Principi della dinamica
Secondo principio della dinamica
L’accelerazione di un oggetto è direttamente proporzionale alla
forza risultante che agisce su di esso ed è inversamente
proporzionale alla sua massa. La massa è la misura dell’inerzia di
un corpo e rappresenta la quantità di materia.
La forza è l’azione capace di
accelerare un oggetto
La forza risultante è il vettore
somma di tutte le forze.
Seconda legge di Newton
Equazione dimensionale
F ma
[ F ] [ m][a ] MLT 2
m
SI : N k g 2
s
Il Newton viene definito come
la forza capace di imprimere
ad un corpo di massa 1 kg
una accelerazione di 1 m/s²
IL SECONDO PRINCIPIO DELLA DINAMICA
Più forza metto più
il carrello accelera
Al crescere della forza cresce anche
l’accelerazione, cioè forza e accelerazione sono
direttamente proporzionali.
Più massa ha il
carrello e meno
accelera
Al crescere della massa diminuisce l’accelerazione,
cioè massa e accelerazione sono inversamente
proporzionali.
LA
MISURA DI UNA FORZA
Un modo per individuare la forza è quello di
riconoscere un suo effetto: ad esempio la
deformazione di oggetti, come molle,
elastici, lamine, ecc. Alcune molle si allungano se
tirate, altre si accorciano se premute. Gli elastici tondi
si deformano e si allungano, se tirati.
LA
MISURA DI UNA FORZA
Lo strumento che si utilizza per misurare la
FORZA si chiama DINAMOMETRO
FUNZIONAMENTO DEL DINAMOMETRO:
Consideriamo una molla vincolata per un suo
estremo ad un sostegno fisso; dotiamo l’altro estremo
di una freccia di riferimento. Segneremo , su un
regolo solidale al sostegno, lo zero quando la molla
non è sollecitata. Successivamente una certa forza
nota (generata da un oggetto campione – o.c.- di
forza) è applicata al suo estremo. Segneremo l’1 sul
regolo in corrispondenza della freccia.
Per successivi multipli dell’o.c. si segnano 2,3,4, etc
Forza peso
La forza peso (o più semplicemente peso) agente su un
corpo è la forza che il campo gravitazionale esercita su una
massa verso il centro della Terra.
La forza che chiamiamo peso
è dovuta all’attrazione
gravitazionale che la terra
esercita su tutti i corpi
P mg
La forza peso indicata solitamente con la lettera P, è direttamente
proporzionale alla massa del corpo che la subisce con fattore di
proporzionalità g, detto anche accelerazione gravitazionale, che varia
da pianeta a pianeta….
……Sulla Terra è 9.81 m/s2
Massa e peso
La massa di un corpo è una sua
proprietà intrinseca, indipendente
dalla sua posizione nello spazio e da
ogni altra grandezza fisica
il peso è l'effetto
prodotto su tale massa
dalla presenza di un
campo gravitazionale.
Massa e peso
La forza-peso che agisce su un oggetto cambia da luogo a luogo.
In qualunque luogo la si misuri, la massa di un corpo è sempre la stessa.
Quanti newton pesi?
La forza peso sugli altri corpi celesti
N/kg
per gli esseri viventi molti
dei pianeti
indicati in tabella sarebbero
invivibili anche ci fosse
atmosfera sulla loro
superficie …….. PERCHè?
Massa inerziale e gravitazionale
La massa inerziale mi di un corpo viene definita come quantità di
materia legandola al principio di proporzionalità come costante di
proporzionalità tra la forza applicata F e l'accelerazione
subita a
F
mi
a
la massa inerziale si
misura misurando
l’accelerazione subita
dal corpo
quando ad esso è
applicata una forza
nota
Il peso per definizione è proporzionale alla massa gravitazionale
La massa gravitazionale è
quella grandezza fisica che
si misura con la bilancia.
P
mg
g
Per definizione, possiamo
esprimere la forza peso P come il
prodotto della massa
gravitazionale mg
per un vettore g, chiamato
accelerazione di gravità,
dipendente dal luogo nel quale si
effettua la misurazione
e le cui unità di misura dipendono
da quella della massa
gravitazionale
Bilancia
La Bilancia è costituita da una
asticella rigida omogenea,
incernierata nel suo punto centrale
ad un asse orizzontale, e dotata agli
estremi di due piatti. In equilibrio
l’indice solidale segna zero.
Convenzionalmente si assegna massa
unitaria di 1kilogrammo (1Kg) ad
un oggetto campione arbitrario di
Pt-Ir custodito a Parigi.
Si assegna massa unitaria ad un
oggetto quando posto su un piatto
della bilancia,
essa è in equilibrio se poniamo il
campione del kilogrammo massa
dell’altro piatto
della bilancia.
RICORDIAMO
LA LEGGE DI CADUTA DEI GRAVI
L’accelerazione dovuta alla gravità è
indipendente dalla massa del corpo
Ricordiamo l’osservazione di Galileo che tutti gli oggetti in
caduta libera subiscono la stessa accelerazione,
indipendentemente dalla loro massa. Quindi, usando la seconda
legge di Newton, possiamo dire che la forza di gravità `e
proporzionale alla massa, infatti in questo modo otteniamo
un’accelerazione costante per tutti i
corpi.
Esercizi
IL TERZO PRINCIPIO DELLA DINAMICA
“Ad ogni azione corrisponde una reazione uguale e contraria”
N.B.:
Le forze di azione e
reazione agiscono
sempre su
corpi diversi
Forze uguali ed
opposte, ma agenti
sullo stesso corpo,
non possono essere
quelle
previste dalla terza
legge di Newton
A
B
F A F B
Se un oggetto A esercita una forza F su un
oggetto B, allora l'oggetto B eserciterà
sull'oggetto A una forza F uguale e contraria
IL TERZO PRINCIPIO DELLA DINAMICA
Nel caso della propulsione, si spinge il fluido in
dietro per ottenere una spinta in avanti. Grazie
alla propulsione gli aerei volano, i razzi vanno in
orbita, le navi navigano: il mezzo spinge il fluido
in dietro attraverso i motori per ottenere una
spinta in avanti:
In acqua,
attraverso il
movimento
degli arti,
spingiamo
l’acqua dietro
di noi, quindi
l’acqua risponde
con una forza
in avanti che ci
fa avanzare.
IL TERZO PRINCIPIO DELLA DINAMICA
nell'istante del tuffo la barca si
muove all'indietro perché il
tuffatore esercita su di essa una
forza per prendere lo slancio e la
barca, ovviamente, si allontana.
Contemporaneamente la barca
esercita una forza sul tuffatore e
lo spinge in avanti.
LEGGE DI GRAVITAZIONE UNIVERSALE
La leggenda narra che durante un
pomeriggio estivo Isaac Newton si
sedette sotto un melo: una mela
cadde dall’albero colpendo la sua
testa, questo evento lo fece riflettere
su quella che sarebbe diventata la
legge di gravitazione universale.
Newton intuì che la forza che tiene in
orbita i pianeti attorno al sole era
della stessa natura della forza che
attrae gli oggetti sulla superficie
terrestre.
LEGGE DI GRAVITAZIONE UNIVERSALE
Il modulo della forza con cui interagiscono due corpi qualsiasi dotati
di massa è direttamente proporzionale al prodotto delle loro masse e
inversamente proporzionale al quadrato della reciproca distanza (o,
più precisamente, dalla distanza tra i centri di massa dei due corpi).
FG G
mM
r2
I satelliti artificiali
LEGGE DI GRAVITAZIONE UNIVERSALE
Quando consideriamo corpi sulla superficie terrestre, trascureremo
sempre la mutua attrazione tra di essi, perché molto più piccola delle
rispettive forze peso
• Questa forza è importante per lo studio del moto dei pianeti
• Il peso dei corpi può essere derivato da questa forza
Variazione dell’accelerazione al variare
dell’altezza h (distanza dal suolo)
SISTEMI NON INERZIALI
Un sistema di riferimento non inerziale è un sistema di riferimento nel
quale la descrizione della dinamica dei corpi non vede verificato il
principio di inerzia. Un sistema di riferimento non inerziale è cioè un
sistema di riferimento in cui un corpo soggetto ad una risultante di forze
nulla si muove comunque di moto non uniforme (accelerato).
FORZE FITTIZIE
Forze che non sono esercitate da alcun agente che si
manifestano nei sistemi non inerziali
Le forze apparenti sono forze
fittizie, che non corrispondono a
una vera e propria azione fisica,
ma che vengono introdotte per
spiegare le deviazioni nelle
accelerazioni dei corpi in alcuni
sistemi di riferimento.
FORZE
DI CONTATTO E FORZE A DISTANZA
Le forze si possono suddividere in forze di contatto e forze a
distanza: per le prime si intendono quelle forze che agiscono tra
due corpi quando essi si toccano (es: la forza del vento); per le
altre invece quelle che agiscono tra due corpi a distanza (es:
forza di gravità).
FORZA
ELASTICA
Per corpi elastici intendiamo quei corpi che sottoposti ad una sollecitazione
tramite una forza, una volta deformatosi, finita l’azione della forza, ritornano
nelle condizioni iniziali. La forza elastica è quella forza che si evidenzia ogni
volta che noi proviamo a sollecitare un corpo elastico tentando ti allungarlo,
comprimerlo o deformarlo. In tal caso il corpo reagisce con una forza interna
che si oppone alla nostra sollecitazione, che vale:
Forza Esterna (Mano)
Forza Elastica
Felastica k S
dove F
è la forza elastica, k è il coefficiente elastico della molla, misurata in N/m e
ΔS è l’allungamento della molla rispetto alla posizione iniziale, il segno meno sta ad
indicare che la forza si oppone alla sollecitazione, cioè la forza elastica è una forza
di richiamo.
LA FORZA ELASTICA
Se riportiamo in un grafico gli allungamenti (ΔS) e le relative
forze (F) che li hanno provocati, otteniamo una retta passante
per l’origine.
Ciò attesta che tra forza e deformazione esiste una diretta
proporzionalità, quindi il rapporto tra le due grandezze è una
costante,
detta
costante
elastica,
che
dipende
dalle
caratteristiche intrinseche della molla stessa:
F
k Costante Elastica
S
LA FORZA D’ATTRITO
È esperienza comune che se diamo una spinta, sufficientemente
forte, ad un corpo su un altro (ad esempio un libro su un tavolo)
questo si muove e dopo un po’ , se si smette di applicare la
forza, si ferma.
È evidente, inoltre, che questa “resistenza” al moto diminuisce
se le superfici a contatto sono maggiormente levigate; ad
esempio se il libro di cui sopra si trovasse sul ghiaccio basterebbe
una spinta minore per metterlo in movimento e si fermerebbe
dopo aver percorso uno spazio maggiore.
LA FORZA D’ATTRITO
attrito radente
si esercita tra
due superfici
attrito volvente
compare quando un
corpo rotola su una
superficie
attrito viscoso
si ha quando un
corpo si muove
in un fluido
LA FORZA D’ATTRITO RADENTE
ATTRITO STATICO: interviene
quando il corpo è in quiete e deve essere
“messo in moto”. È una forza con un effetto “a soglia”, cioè sino a quando la
forza applicata è minore di una certa quantità il corpo NON si muove. La soglia
è data da:
FAS S FP
La forza di attrito statico, che una superficie esercita su un corpo che si trova
appoggiato su di essa, è la minima forza che bisogna applicare al corpo perché
esso si metta in moto.
1. Non dipende dall’area
di contatto.
2. E’ parallela alla superficie
di contatto.
3. Il suo verso si oppone
al movimento.
LA FORZA D’ATTRITO RADENTE
ATTRITO DINAMICO: interviene quando il corpo è già in movimento.
In tali condizione la forza resistiva di attrito è data da:
FA D D FP
con D S
Da un punto di vista
microscopico l’attrito `e
dovuto alle microfusioni
che si formano in
corrispondenza delle
asperità delle due
superfici a contatto
LA FORZA D’ATTRITO RADENTE
… è più faticoso spostare un oggetto fermo o trascinarlo
quando è già in movimento?
LA FORZA D’ATTRITO
Dal punto di vista grafico si ha:
LA FORZA D’ATTRITO
Diverso è il caso di “rotolamento”, e cioè dall’ATTRITO
VOLVENTE, che è quella che si manifesta alla interfaccia
(superficie di contatto) fra un corpo solido rotondo che rotola su
un altro solido, cambiando ad ogni istante la superficie di
contatto.
FA V V
FP
r
La forza di attrito volvente è minore dell’attrito radente, e
questo è il motivo per cui, ad esempio, si usano dei carrelli per
spostare oggetti pesanti oppure i cuscinetti a sfera.
ATTRITO VISCOSO
la forza di attrito viscoso dipende, oltre che dalla velocità, anche dal
fluido in cui l’oggetto si muove, dalla forma e dalle dimensioni
dell’oggetto in movimento che, se scelte con criteri aerodinamici,
riducono la formazione di vortici nel fluido
ATTRITO VISCOSO
Un caso molto più semplice è quello di una sfera di raggio r
che si muove con velocità v (non così elevata da generare
vortici) in un fluido. In questa situazione, il modulo Fv della
forza di attrito viscoso sulla sfera è dato dalla legge di Stokes
Fv 6vr
Coefficiente di
viscosità dipende
dal tipo di fluido e
dalla temperatura
ATTRITO VISCOSO
Su un paracadutista non agisce soltanto la forza-peso (rivolta verso il
basso), ma anche la forza di attrito con l’aria (che si oppone al moto di
caduta e, quindi, è rivolta verso l’alto)
Il moto del paracadutista è determinato dalla risultante di queste due
forze. La forza di attrito con l’aria aumenta man mano che la velocità del
paracadutista cresce, fino a che raggiunge la stessa intensità della forzapeso. Da questo istante in poi le due forze sono uguali e opposte, e quindi la
loro risultante è uguale a zero:
Per il principio di inerzia, il
paracadutista scende allora a
velocità costante, chiamata
velocità limite
LA FORZA D’ATTRITO
Infine c’è da sottolineare che la forza
necessariamente una forza “svantaggiosa”.
d’attrito
NON
è
Infatti è proprio grazie all’attrito, ad esempio, che possiamo
camminare.
Le automobili possono muoversi sulla strada solo quando c’è
attrito. Infatti, quando la strada è molto bagnata o coperta
di nevischio, e l’attrito è quindi molto ridotto, le ruote
slittano, o girano su se stesse, non facendo procedere il veicolo
.
Tutti i veicoli possono rallentare e fermarsi grazie alle forze di
attrito esercitate tramite i loro freni.
I chiodi e le viti tengono unite le parti di un oggetto grazie al
grande attrito che si sviluppa contro le fibre dei materiali.
VINCOLO
Un vincolo è un oggetto che impedisce ad un corpo di compiere
alcuni movimenti. Esempi: il piano di un tavolo, il chiodo di un
quadro.
I vincoli esercitano delle forze vincolari
che vanno contate nella condizione di
equilibrio.
Le forze vincolari non hanno intensità
definita: il vincolo si adatta alla forza
che agisce su di esso.
EQUILIBRIO PUNTO MATERIALE
Un corpo è in equilibrio quando è in quiete e vi rimane nel tempo. Determinare le
condizioni di equilibrio di un corpo è problema importante, che può diventare complesso:
un ponte deve essere in equilibrio anche se è attraversato da migliaia di vetture, un
grattacielo deve resistere alle scosse
sismiche.
il punto materiale rimane in equilibrio, se
la risultante del sistema di forze è nulla;
CORPO RIGIDO
Si definisce CORPO RIGIDO un corpo non elastico, indeformabile
ed esteso nelle 3 dimensioni dello spazio.
Il CORPO RIGIDO, così
come il PUNTO
MATERIALE, è una
schematizzazione ideale
(non esistente nella realtà),
utile per definire le
equazioni che descrivono
l’equilibrio e/o il moto.
Un corpo rigido, a
differenza del punto
materiale, oltre a poter
traslare nello spazio, può
anche ruotare intorno ad
un asse.
z
y
x
CORPO RIGIDO
Consideriamo corpo rigido un oggetto che non viene
deformato, qualsiasi sia la forza ad esso applicata.
La palla da bowling può
essere schematizzata
come un corpo rigido.
La scatola da scarpe non
può essere schematizzata
come un corpo rigido.
CORPO RIGIDO
L’esperienza mostra che un sistema di forze parallele
applicate ad un corpo rigido è riconducibile ad un’unica
forza risultante con la direzione identica alle forze
applicate, l’intensità pari alla somma delle intensità
tenendo conto del verso, ed il verso é come quello delle
forze prevalenti. Il punto di applicazione della forza
risultante è il baricentro
P m1 g m2 g m3 g ... mg
g
P
BARICENTRO
Il baricentro o centro di gravità di un
corpo rigido è il punto di applicazione della
forza-peso, risultante delle piccole forze
parallele applicate ad ogni volumetto del
corpo.
Se un corpo ha un centro di simmetria, il
baricentro è in quel punto.
Per corpi irregolari il baricentro può
trovarsi anche all'esterno del corpo.
L'EQUILIBRIO
DI UN CORPO APPESO
Un corpo appeso in un punto P è in equilibrio se il
baricentro G si trova sulla verticale passante per P.
L'EQUILIBRIO
DI UN CORPO APPOGGIATO
Un corpo appoggiato su un piano è in equilibrio se la retta verticale
passante per il baricentro G interseca la base di appoggio.
Equilibrio dei corpi appoggiati
Perché la Torre di
Pisa non cade?
Perché la verticale
passante per il
baricentro G cade
all’interno della sua
base.
G
CORPO RIGIDO E EQUILIBRIO
Per l’equilibrio di un CORPO RIGIDO il fatto che la risultante
delle forze su esso agenti sia nulla è una condizione necessaria
ma non sufficiente.
Consideriamo, ad esempio, una bacchetta rigida cui
applichiamo due forze di uguale intensità ma verso opposto,
così che la loro risultante sia nulla.
A seconda di come sono applicate le due forze la bacchetta
sarà in equilibrio (Caso A) oppure ruoterà (caso B):
Caso A
Caso B
Quindi la condizione che la risultante sia nulla, soddisfatta in
entrambi i casi, non è sufficiente a garantire l’equilibrio del corpo.
CORPO RIGIDO E EQUILIBRIO
Affinché un oggetto sia in equilibrio, non è sufficiente che la
somma delle forze sia uguale a zero. Ad esempio sul righello in
figura, nonostante le due forze F si sommino dando una forza
risultante nulla, essa farà ruotare l’oggetto
MOMENTO DELLA FORZA
Per i corpi estesi, quindi, oltre al modulo, alla direzione e al verso
della forza, è importante anche il punto di applicazione.
Esempio
Per aprire una pesante porta si
spinge in un punto il più lontano
possibile dai cardini. Nessuna forza,
per quanto intensa, riuscirà ad
aprirla se esercitata in un punto
appartenente alla retta passante
per i cardini.
La grandezza che misura l’efficacia di una forza nel produrre la
rotazione è chiamata Momento della Forza M.
Il braccio di una forza
Il braccio di una forza F
rispetto
a un punto O è dato dalla
distanza
tra il punto O e la retta
che contiene F. Perché la
rotazione del bullone è più
agevole
se la chiave inglese è più lunga?
Il momento di una forza F
rispetto a un punto O è uguale
al prodotto dell’intensità F
della forza per il braccio b.
MOMENTO DI UNA FORZA
Forza e braccio sono inversamente proporzionali, perciò più lungo è il braccio
meno intensa sarà la forza da applicare per avere lo stesso momento. L’unità di
misura del momento è il Newton per metro, essendo il prodotto di una forza
per una distanza. L’effetto del momento è di produrre una rotazione attorno al
punto di riferimento. Per convenzione, il momento si definisce positivo se la
rotazione si compie in senso orario; negativo se la rotazione si compie in senso
antiorario.
EQUILIBRIO DI UN CORPO RIGIDO
Un CORPO RIGIDO è in EQUILIBRIO se:
1) la forza risultante di tutte le forze ad esso applicate
è nulla:
FRisultante Fi 0
i
2) il momento risultante di tutti i momenti di tutte le
forze applicate al corpo, determinati rispetto ad uno
stesso punto, è nullo:
M Risultante M i 0
i
Se sono soddisfatte queste condizioni il corpo non trasla e non
ruota, quindi è in equilibrio.
MOMENTO DI UNA COPPIA DI FORZE
Una coppia di forze è l'insieme di due forze uguali e
opposte applicate in due punti di un corpo rigido.
L'effetto di rotazione è descritto dal momento della coppia
e non dipende dal punto O scelto.
MOMENTO DI UNA COPPIA DI FORZE
Il momento di una coppia è
dato dalla somma dei momenti
delle forze rispetto al punto
medio O. Esso è uguale al
prodotto dell’intensità F di una
forza per la distanza d tra le
rette di azione delle due forze.
Le leve
«Datemi un punto d'appoggio e vi
solleverò il mondo».
Questa frase è attribuita ad
Archimede che la pronunciò
quando iniziò a costruire
macchine capaci di spostare
grandi pesi con piccole forze.
Le leve
Si dice leva una macchina semplice
costituita da un’asta rigida che ruota
intorno ad un punto fisso chiamato fulcro
Le leve
F
= fulcro
R = forza da vincere o Resistenza
P = forza applicata per vincere la
Resistenza o Potenza
Bp = distanza tra fulcro e Potenza
Br = distanza tra fulcro e Resistenza
Le leve
Vincere
la resistenza con la potenza significa
portare all’equilibrio delle due forze
La legge di equilibrio
Una leva è in equilibrio se il prodotto della potenza P per
il suo braccio bp è uguale al prodotto della resistenza R
per il suo braccio br
P x bp = R x br
che deriva dalla proporzione:
P:R = br:bp
Vantaggio
II vantaggio di una leva e, in generale, di una qualsiasi
macchina semplice, è il rapporto tra l'intensità della
resistenza e quella della potenza necessaria per
ottenere l'equilibrio; possiamo quindi scrivere la
seguente formula :
V
= R
P
si può affermare che il vantaggio si può
anche calcolare facendo il rapporto tra il
braccio della potenza e quello della
resistenza
Una leva è vantaggiosa se
la forza applicata richiesta è
minore della forza resistente
br< bp
Una leva è svantaggiosa se
la forza applicata richiesta è maggiore
della forza resistente
br > bp
Una leva è indifferente se la forza
applicata richiesta è uguale alla
forza resistente
br = bp
Le leve
A seconda della posizione del fulcro rispetto
alla resistenza e alla potenza le leve vengono
divise in tre generi:
Le leve di primo genere
Nelle leve di primo genere il fulcro si trova
tra la potenza e la resistenza.
Possono essere indifferenti, vantaggiose e
svantaggiose a seconda della lunghezza dei
bracci
Le leve di primo genere
Le leve di secondo genere
Nelle leve di secondo genere la resistenza si
trova tra il fulcro e la potenza.
Poiché il braccio della potenza è sempre
maggiore del braccio della resistenza sono
leve sempre vantaggiose
Le leve di secondo genere
Le leve di terzo genere
Nelle leve di terzo genere la potenza è
collocata tra il fulcro e la resistenza.
Poiché il braccio della potenza è sempre
minore del braccio della resistenza sono
leve sempre svantaggiose
Le leve di terzo genere
Identifica le varie leve