Dinamica e statica
Statica studia l’equilibrio di un corpo
Dinamica studia il moto e le sue cause
La forza è una qualunque causa capace di
produrre deformazioni o modificazioni
nello stato di moto di un corpo. Essa è una
grandezza vettoriale
Massa e peso
La bilancia misura la massa dei corpi attraverso il confronto dei loro
pesi. La bilancia indica un uguale valore della massa sulla terra e
sulla luna, mentre il dinamometro fornisce indicazioni diverse.
Il pendolo
•
•
Si dimostra che per piccole
oscillazioni F = -mg/l * s
quindi a = - g/l * s
mg
La forza elastica produce un moto armonico: a = F/m = -ks/m
= -k/m s 2 = k/m
I vincoli
Un corpo si dice in equilibrio quando è in quiete
e rimane in quiete al trascorrere del tempo
Il vincolo è un oggetto che limita il movimento; i
vincoli esercitano forze vincolari per
condizionare i movimenti degli oggetti
Un punto materiale è in equilibrio quando la
somma di tutte le forze applicate (comprese
quelle vincolari) è zero
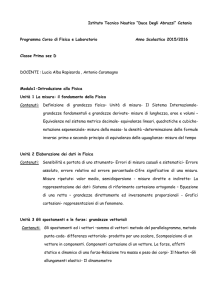
Il piano inclinato
f = mg cos
f‖= mg sin
f
f‖
mg
Lungo il piano inclinato, in
assenza di attrito, il moto è
uniformemente accelerato con
accelerazione a = g sin
Per mantenere in equilibrio
un corpo su un piano
inclinato occorre…
Forza di attrito
L’attrito è una forza che si oppone allo
spostamento e dipende sia dalla caratteristica
delle superficie che vengono a contatto sia
dalla forza con cui il corpo preme sulla
superficie d’appoggio
Attrito statico: s F
Attrito dinamico: d F
F è mg se il piano è orizzontale, se il piano è
inclinato è mgcos
Grazie all’attrito si può tenere in equilibrio un
oggetto su un piano inclinato e si può far
scendere un oggetto da un piano inclinato
con velocità costante
Forza di attrazione gravitazionale
F = G m1m2 /R2
Direttamente proporzionale al prodotto
delle masse e inversamente proporzionale
al quadrato della distanza
Se uno dei due corpi è la Terra e siamo in
prossimità della superficie terrestre:
F = G Mm /R2T=mg dove g = GM/R2T= 9,8
m/s2
Corpi rigidi
Un corpo rigido ha un’estensione e non si
deforma; una forza applicata ad esso può farlo
traslare e/o ruotare
Qual è la condizione di equilibrio per un corpo
rigido?
L’effetto di una forza su un corpo rigido è diverso
se il punto di applicazione è diverso, per questo
si definisce una nuova grandezza: momento di
una forza o momento torcente
M = r x F
vettore di modulo rFsin e
perpendicolare al piano r,F (regola mano destra)
Momento di una forza
M
r
cardine
F
rsin=b=braccio=distanza tra la retta
d’azione della forza e il cardine;
descrive la rotazione dovuta ad una
forza
Coppia di forze
Coppia di forze: due forze uguali ed
opposte che agiscono in punti diversi dello
stesso corpo rigido
F2
M = r12 x F
r12= r1-r2
F1
M descrive la rotazione dovuta ad una
coppia di forze
Forze aventi
stessa linea
d’azione
Forze
concorrenti
b1
b2
F2
F1
F1/ F2 = b2/ b1
F1+ F2
F2
F1
F2
F1+ F2
Il modulo è la diff. dei
moduli
F1
Condizioni di equilibrio per un
corpo rigido
Affinchè non trasli Ftot = 0
Affinchè non ruoti Mtot = 0
Baricentro: punto di applicazione della
forza peso del corpo, in questo punto si
pensa concentrato tutto il peso del corpo
Equilibrio stabile, instabile e indifferente
Equilibrio stabile: se
sposto il quadro da
questa posizione esso vi
ritorna
Equilibrio instabile: se
sposto il quadro non
ritorna più in questa
posizione
Equilibrio
indifferente: se
sposto il quadro
mantiene la nuova
posizione
I principi della dinamica
I: se la risultante delle forze applicate è nulla il
corpo o permane nel suo stato di quiete o si
muove di moto rettilineo uniforme e viceversa
Perché un libro non cade se messo su un
tavolo?
II: l’accelerazione di un corpo è direttamente
proporzionale alla forza applicata F = ma
Possiamo ricavare le dimensioni della forza:
[m]*[l]/[t]2
Unità di misura 1N = 1Kg*m/s2
Nel sistema CGS 1dine = 10-5 N
Ancora sul primo principio…
Un sistema di riferimento si definisce inerziale
se rispetto ad esso vale il primo principio della
dinamica
I sistemi di riferimento terrestri sono in buona
approssimazione inerziali
Un sistema che si muove di moto rettilineo
uniforme rispetto ad uno inerziale è un sistema
inerziale
Come descrive il moto di un oggetto un sistema
di riferimento che si muove di moto uniforme
rispetto ad uno dato?
Le trasformazioni di Galileo
V
S
x = x’ + Vt
v = v’ + V
t = t’
S’
• P
Forze apparenti
Se i sistemi di riferimento sono accelerati
si dicono non inerziali e nell’equazione
F=ma compaiono le forze fittizie o
apparenti
Assenza di peso in un ascensore a cui
viene tagliato il cavo
F + Ffittizia = ma F = mg - Ffittizia = mg-mg
=0
III: se A esercita una forza su B anche B esercita
su A una forza uguale ed opposta
Attenzione: quanto vale la risultante delle forze?
La risultante non è zero perché le due forze non
hanno lo stesso punto di applicazione
Ex: quando camminiamo spingiamo indietro il
terreno ricevendo da esso una spinta in avanti
Ex: Attrazione gravitazionale
Perché camminiamo…
attrito
Forza
peso
risultante
Lavoro e energia
Una forza compie lavoro se il suo punto
di applicazione si sposta
Per una forza costante L = F • S =
FScos
L è una grandezza scalare, mentre F e
S sono vettoriali
F
Unità di
misura=Nm=Joule
In cgs 1erg = 10-7J
Quando un corpo può compiere un lavoro si
dice che possiede energia
Energia cinetica: energia posseduta da un
corpo in moto ½ m v2
Energia potenziale gravitazionale: energia
posseduta da un corpo che si trova ad una
quota h mgh (quella elastica ½ k x2 )
L’energia potenziale si può definire solo se le
forze sono conservative
L = ½ m v 2f - ½ m v 2i
L = Ui - Uf
L’energia ha la stessa unità di misura del
lavoro
Potenza = W = L/t unità di misura watt=J/s
Le forze si dicono conservative se il lavoro è
indipendente dal tragitto ma dipende solo dal
punto di partenza e da quello di arrivo, altrimenti
sono dissipative
La forza peso, la forza elettrica sono
conservative, la forza di attrito è dissipativa
Nei sistemi isolati vale la legge di conservazione
dell’energia meccanica:
E=K+U
Ex: pendolo, molla e caduta dei gravi
Durante l’oscillazione del pendolo e della molla
si ha conversione di energia potenziale in
cinetica e viceversa; agli estremi l’energia è solo
potenziale, al centro l’energia potenziale è
minima
urti
Quantità di moto = mv
Negli urti si conserva sempre la quantità di moto
totale (se il sistema è isolato)
Solo negli urti elastici si conserva anche
l’energia cinetica totale
In quelli anelastici una parte dell’energia cinetica
si converte in calore
Per i moti rotatori momento angolare J = I si
conserva nei sistemi isolati