61
Caratteristiche costruttive
dei robot industriali
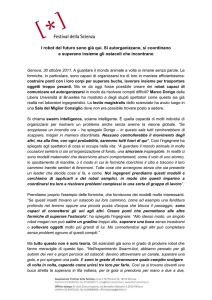
L’architettura del robot è quella descritta schematicamente
in figura 1, costituita dai seguenti sottoinsiemi:
●
●
●
struttura meccanica;
sistema d’azionamento;
sistema di comando.
1. Struttura meccanica
La struttura meccanica dei robot è costituita da una catena cinematica aperta, formata con elementi normalmente posti in serie.
Ciascun componente, che si indica con il termine link, è collegato a quello successivo per mezzo di giunti (joint); questi
possono essere:
●
●
●
●
Fig. 1. Architettura di un robot industriale.
rotoidali (fig. 2);
prismatici (fig. 3);
sferici (fig. 4);
elicoidali.
Quelli di gran lunga più impiegati sono i primi due; il giunto
elicoidale è praticamente costituito da una vite a ricircolazione di sfere.
Il primo componente della catena è il basamento, che può
essere fisso o mobile; l’ultimo è l’attuatore finale, che assume
un’importanza fondamentale in relazione all’applicazione.
La nomenclatura e le configurazioni strutturali più diffuse
sono esaminate nelle schede 64 e 65.
Il compito fondamentale della struttura meccanica è quello
di posizionare nello spazio l’attuatore finale, o meglio il suo
TCP (Tool Center Point), in modo che il robot possa correttamente intervenire sul processo produttivo.
Ciascun punto dello spazio è definito da tre coordinate; il moto
di qualsiasi corpo rigido è definito da sei coordinate, tre delle
quali definiscono lo spostamento di un suo punto caratteristico, come per esempio il baricentro, mentre le altre tre individuano le rotazioni rispetto ai tre assi di riferimento cartesiani; la posizione di un corpo nello spazio, nota quella di un
suo punto e la sua forma geometrica, è individuata da sei grandezze.
Tutte le precedenti considerazioni si possono sintetizzare
nell’affermazione che un corpo solido ha nello spazio in
cui si muove sei gradi di libertà; per conoscere univocamente la posizione assunta nello spazio dal TCP (Tool Center Point) di un robot sono quindi necessarie sei coordinate, tre traslazioni e tre rotazioni.
Fig. 2. Giunto rotoidale.
318 ROBOT
INDUSTRIALI
Un robot può dunque essere in grado di posizionare e orientare completamente l’end effector solo se dispone di sei gradi
di libertà; un automa dotato di un numero di gradi di libertà
inferiore a sei non permette di posizionare e orientare completamente la sua estremità; un robot dotato di un numero
61 – Caratteristiche costruttive dei robot industriali
Fig. 3. Giunto prismatico.
di gradi di libertà superiore a 6 si dice ridondante; tale ridondanza dei gradi di libertà corrisponde alla mobilità della
struttura del robot.
Le figure 5 e 6 mostrano rispettivamente robot a tre e a cinque gradi di libertà; esse rappresentano lo schema funzionale cinematico del robot; in esso vengono rappresentati i
movimenti dei vari link nonché i tipi di giunto.
Nella tabella 1 sono definite le notazioni convenzionali attraverso le quali rappresentare lo schema funzionale cinematico di un qualsiasi robot; in figura 7 sono invece riportati
alcuni esempi di strutture a tre gradi di libertà con riferimento costituito dal telaio fisso; si nota che:
●
●
●
Fig. 4. Giunto sferico.
●
●
i robot cartesiani sono caratterizzati da tre accoppiamenti
prismatici e pertanto sono definiti P-P-P;
i robot cilindrici sono definiti P-R-P;
i robot polari hanno un cinematismo R-R-P con due rotazioni intorno ad assi ortogonali tra loro;
i robot articolati sono definiti R-R-R con tre rotazioni che
non riguardano assi paralleli;
i robot SCARA appartengono alla categoria P-R-R e R-RP, con le due rotazioni che avvengono intorno ad assi
paralleli.
Tab. 1. Simboli grafici per schemi funzionali cinematici.
Coppia
Fig. 5. Robot a tre gradi di libertà R-P-R.
Fig. 6. Robot a cinque gradi
di libertà R-R-P-R-R.
Simbolo convenzionale G.L. Tipo di movimento Nome
Incastro
0
Nessuno
I
Rotoidale
1
Rotazione
R
Prismatica
1
Traslazione
P
Elicoidale
1
Traslazione
E
Sferica
3
Rotazione
S
ROBOT
INDUSTRIALI
319
61 – Caratteristiche costruttive dei robot industriali
Fig. 7. Strutture cinematiche
a tre gradi di libertà.
320 ROBOT
INDUSTRIALI
61 – Caratteristiche costruttive dei robot industriali
2. Sistema di azionamento
Ciascun asse del robot necessita di un azionamento per convertire i segnali provenienti dall’unità di governo in movimenti della struttura; ciò avviene attraverso la trasformazione
in energia meccanica dell’energia disponibile per ogni asse;
questa può essere pneumatica, oleodinamica o elettrica.
Nella maggior parte dei casi gli azionamenti robotici sono di
tipo elettrico e operano secondo lo schema di controllo ad
anello chiuso.
Gli attuatori impiegati nella costruzione del sistema di azionamento degli automi sono riportati, separati per fonte energetica, nella tabella 2.
Attuatori pneumatici
Gli attuatori pneumatici sono sempre meno utilizzati nella
costruzione dei bracci robotici a causa della difficoltà di ottenere un preciso controllo di posizione; infatti, poiché la
principale caratteristica dell’aria è la sua comprimibilità, essi
Tab. 2. Classificazione degli azionamenti robotici.
Classificazione degli azionamenti robotici
Fonte energetica Attuatore
A semplice e a doppio effetto
A stelo passante
Senza stelo
A più posizioni
Motore
A
A
A
A
A
Attuatore
rotante
A paletta
A pistone-cremagliera
Cilindro
A semplice effetto
A stelo passante
A più posizioni
Motore
A ingranaggi
A palette
A pistoni
Motore D.C.
Tradizionali
A magneti permanenti
Senza spazzole
Motore
passo-passo
A magneti permanenti
A riluttanza variabile
Ibrido
Motore A.C.
Sincrono e asincrono
PNEUMATICA
OLEODINAMICA
ELETTRICA
Modello
Cilindro
palette
ingranaggi
pistoni
membrana
turbina
Elettromagnete In D.C. e in A.C.
ROBOT
INDUSTRIALI
321
61 – Caratteristiche costruttive dei robot industriali
presentano l’inconveniente di un comportamento dinamico
oscillatorio non facilmente controllabile.
Largo impiego hanno invece nella realizzazione degli organi
di presa e dei manipolatori a sequenza fissa.
I cilindri possono essere accoppiati a ingranaggi per trasformare le traslazioni in rotazioni.
Dal punto di vista dell’applicazione nella robotica gli attuatori pneumatici hanno i seguenti vantaggi:
●
●
●
●
●
●
●
potenze specifiche elevate;
velocità di movimento elevata;
sforzi ridotti alle basse pressioni;
funzionamento semplice e affidabile;
pulizia;
assenza di scintille;
facile manutenzione.
Presentano per contro i seguenti svantaggi:
●
●
●
●
precisione solo a fine corsa;
posizione intermedia dipendente dal carico a causa della
comprimibilità dell’aria;
velocità non costante;
instabilità dinamica.
Attuatori oleodinamici
Gli attuatori oleodinamici sono utilizzati nei robot che movimentano grandi carichi dal momento che, tra le diverse tecnologie, quella idraulica presenta il più conveniente rapporto
potenza/peso.
Nelle applicazioni robotizzate le pressioni di lavoro sono dell’ordine dei 100 bar per consentire l’impiego di tubazioni flessibili e leggere; purtroppo l’olio in pressione deve essere prodotto
sul posto di utilizzo con una centralina idraulica comprendente
il motore elettrico, la pompa, i filtri e il serbatoio; vengono impiegati, come nell’attuazione pneumatica, cilindri accoppiati a
meccanismi vari per trasformare il moto lineare in rotatorio.
Gli attuatori oleodinamici presentano i seguenti vantaggi:
●
●
●
●
●
●
●
●
grandi potenze specifiche (fino a 3,5 kW/kg);
velocità costanti al variare del carico applicato;
elevate coppie e accelerazioni;
forze costanti;
elevate velocità;
buona precisione di posizionamento;
ridotti problemi di stabilizzazione;
assenza di scintille.
Per quest’ultima loro proprietà sono insostituibili, nei casi di ambienti ad atmosfera potenzialmente esplosiva, quando le forze
in gioco non consentono l’impiego dell’attuazione pneumatica.
Gli svantaggi degli attuatori idraulici sono invece:
●
●
●
322 ROBOT
INDUSTRIALI
difficoltà di sistemazione delle tubazioni;
possibili perdite d’olio;
basso rendimento energetico ed elevate perdite;
61 – Caratteristiche costruttive dei robot industriali
●
●
●
dissipazione della potenza nelle valvole;
elevato costo e ingombro della centralina idraulica;
rumorosità.
Attuatori elettrici
Gli attuatori elettrici robotici sono normalmente alimentati
attraverso convertitori che trasformano l’energia elettrica
disponibile dalla rete, conferendole le caratteristiche particolari richieste dal motore, e provvedono al controllo della
velocità di rotazione dell’albero.
I motori elettrici destinati all’impiego nella robotica hanno caratteristiche diverse da quelli normalmente impiegati, in servizio più o meno continuo, a velocità costante o variabile in maniera discreta; in altri termini sono molto diverse le caratteristiche dei motori impiegati per la meccanizzazione, intesa come
sostituzione del lavoro muscolare con quello della macchina,
dai motori utilizzati nell’automazione, intesa come sostituzione
di azioni programmate con un dispositivo automatico.
L’impiego degli azionamenti elettrici nei robot è rapidamente
aumentato negli ultimi anni fino ad arrivare all’attuale livello
di diffusione che li vede equipaggiare circa l’85% dell’intera
produzione.
I vantaggi degli attuatori elettrici sono numerosi; citiamo solo
quelli più importanti rispetto all’applicazione di cui stiamo
trattando:
●
●
●
●
●
facilità di alimentazione;
possibile eliminazione dei riduttori di velocità;
possibilità di montaggio diretto sugli assi;
precisione e affidabilità del comando;
assenza d’inquinamento o di perdita d’olio.
I principali svantaggi di questi attuatori sono invece:
●
●
●
non elevato rapporto potenza/peso;
minori coppie massime rispetto agli attuatori idraulici;
possibile emissione di scintille nell’ambiente.
3. Attuatore finale
L’attuatore finale è la parte terminale del robot, ovvero
quella che viene a contatto con gli oggetti sui quali esso
deve operare.
La sua costituzione dipende dalla particolare applicazione,
tuttavia è necessario distinguere tra due tipologie:
●
●
organi di presa;
utensili.
I primi sono utilizzati prevalentemente nei robot di manipolazione e montaggio, mentre gli utensili equipaggiano gli automi impiegati nella verniciatura, nella saldatura e nei vari
tipi di lavorazione.
Gli organi di presa dei robot hanno il compito, assolutamente
ROBOT
INDUSTRIALI
323
61 – Caratteristiche costruttive dei robot industriali
non facile, di sostituire la mano dell’uomo; per comprendere
la complessità di quest’organo basta pensare che esso possiede 22 gradi di libertà; tuttavia per le applicazioni più diffuse sono necessari elementi di presa con un numero piuttosto limitato di gradi di libertà.
Per posizionare e orientare un corpo nello spazio occorrono
sei gradi di libertà; di questi, tre sono normalmente attribuiti
al braccio; pertanto, per completare le possibilità di orientamento, il polso e la mano devono possedere i restanti tre movimenti oltre a quello di chiusura, o serraggio, che garantisce la presa del pezzo da manipolare; in alcuni casi possono
essere sufficienti anche due o addirittura un solo grado di libertà dell’attuatore finale.
Gli organi di presa possono essere classificati in base al tipo
d’energia da cui dipende la forza di serraggio; si hanno dispositivi:
●
●
●
elettromeccanici;
elettromagnetici;
pneumatici.
Gli organi di presa più diffusi sono sicuramente quelli pneumatici. Dal punto di vista funzionale e costruttivo le mani dei
robot possono essere:
●
●
●
●
●
pinze meccaniche (gripper);
ventose;
dita a deformazione;
prelevatori a espansione;
pinze magnetiche.
Nelle pinze meccaniche le dita, due o tre, sono azionate, sia
in chiusura che in apertura, da un motore elettrico oppure
da un cilindro pneumatico od oleodinamico.
Nei modelli a fluido la forza di serraggio è regolabile variando la pressione di alimentazione dell’attuatore; la velocità di chiusura o apertura è modificabile invece attraverso
l’impiego dei regolatori di flusso.
A parità di forza esercitabile gli attuatori oleodinamici hanno
ingombro minore; tuttavia essi sono più costosi e pertanto si
impiegano solo quando esiste la necessità di forze di serraggio elevate.
Fig. 8. Pinze a chiusura parallela
(Sommer).
324 ROBOT
INDUSTRIALI
61 – Caratteristiche costruttive dei robot industriali
Fig. 9. Pinze con chiusura a
forbice (Sommer).
Per l’azionamento delle dita vengono
impiegati cinematismi di vario tipo (leveraggi, camme, ruote dentate, molle,
ecc.) che possono originare traslazioni
(fig. 8) o rotazioni (fig. 9); nei due casi
si parla rispettivamente di sistema di
chiusura parallelo e a forbice.
Le pinze meccaniche possono realizzare
sia la presa esterna che quella interna; l’esigenza di manipolazione di oggetti, anche molto diversi tra di loro, pone
problemi di adattabilità che vengono superati attraverso l’intercambiabilità delle sole dita o dell’intera pinza.
La forza di serraggio delle pinze viene calcolata con i metodi
classici dell’analisi dinamica dei cinematismi, tenendo conto
delle caratteristiche di resistenza dell’oggetto da manipolare.
Le ventose sono particolarmente adatte al prelievo di corpi
lisci, difficili da prendere con sistemi tradizionali perché privi
di appigli, fragili o facilmente deformabili.
Si fissano a opportuni supporti, hanno forme diverse in funzione dell’applicazione e sono realizzate con materiali elastici per garantire sia l’adattamento alla forma dell’oggetto
che la tenuta ermetica del vuoto.
L’inconveniente maggiore delle ventose è costituito dal fatto
che mal si adattano a superfici sporche oppure porose.
La forza di tenuta di una ventosa è data dalla relazione:
F S∆p
Fig. 10. Dita a deformazione
(Megliani).
[61.1]
dove S è l’area efficace, che è normalmente diversa dall’area
geometrica della ventosa a causa della sua deformazione,
mentre ∆p è la differenza di pressione tra l’interno e l’esterno
della ventosa.
Le dita a deformazione sono corpi cavi costruiti con materie
plastiche che si deformano, quando sono in pressione, in una
sola direzione (fig. 10).
Sono sempre meno impiegate dal momento che per afferrare corpi aventi struttura geometrica complessa, loro specifico campo di applicazione, vengono sempre più utilizzate
pinze meccaniche a tre dita.
I prelevatori a espansione sono elementi elastici montati su
un supporto tipo mandrino come indicato in figura 11 dove sono rappresentati i due modelli per presa interna
ed esterna.
L’aria viene immessa tra elemento elastico e mandrino provocando, per deformazione, l’aderenza del prelevatore al particolare da afferrare; la
forza di tenuta è data dalla relazione:
F pS
Fig. 11. Prelevatori a espansione
interni ed esterni (Megliani).
[61.2]
dove p è la pressione di alimentazione
ed S la superficie di contatto.
ROBOT
INDUSTRIALI
325
61 – Caratteristiche costruttive dei robot industriali
Le pinze magnetiche possono essere realizzate sia con magneti permanenti che con elettromagneti; le prime hanno il
difetto di non consentire facilmente il distacco del pezzo ma
sono gli unici utilizzabili in ambienti con pericolo d’esplosione.
I corpi manipolati con pinze elettromagnetiche devono essere piani, puliti e soprattutto magnetizzabili.
Qualora il robot debba effettuare lavorazioni particolari è
necessario che esso sia dotato di utensili specifici; per esempio, un robot per verniciatura dovrà avere in dotazione una
pistola a spruzzo, un robot per saldatura dovrà essere equipaggiato con una pinza o con una torcia, una mola sarà necessaria per effettuare sbavature, una punta per forare, ecc.
Normalmente gli utensili impiegati nei robot sono derivati
da quelli comuni, per mezzo di opportuni adattamenti, e possono essere montati fissi o intercambiabili; la seconda soluzione è indispensabile quando il robot deve cambiare spesso
il tipo di lavorazione; qualora nello stesso ciclo siano richieste al robot lavorazioni diverse, occorre prevedere un dispositivo automatico di cambio utensile, che preleva quello necessario da un magazzino e lo monta automaticamente sul
polso o sulla mano dell’automa.
4. Sistema di comando
Il sistema di comando del robot è costituito dall’unità di governo e dall’insieme dei sensori.
L’unità di governo acquisisce i dati in ingresso, li elabora
sulla base di un programma utente, e invia gli opportuni
segnali di comando agli attuatori.
Tale unità può essere realizzata per mezzo di sequenziatori,
controlli numerici, controllori logici programmabili e microcomputer; quest’ultima soluzione è quella più praticata mentre le prime due sono riservate ai robot meno avanzati.
I sensori sono sostanzialmente strumenti di misura che rilevano grandezze fisiche relative sia al robot (interni) che all’ambiente di lavoro (esterni) ed effettuano la retroazione.
I sensori esterni possono essere suddivisi nelle due categorie:
●
●
sensori a contatto;
sensori a distanza.
I primi sono sensibili ad azioni fisiche direttamente applicate
ad essi come il tatto e il movimento; gli altri rilevano alcune
caratteristiche del mondo esterno, come la distanza e la prossimità, senza contatto fisico diretto; l’interazione fisica necessaria alla misura avviene per mezzo di onde acustiche o
elettromagnetiche.
Un caso particolarmente importante di sensori, appartenenti
a questa seconda categoria, è costituito dai sistemi di visione.
326 ROBOT
INDUSTRIALI
Esercizi
■
costruttive
dei robot industriali
61 Caratteristiche
Esercizio 1. Forza di serraggio
Con riferimento alla figura 12 determinare la
forza di serraggio sapendo che il corpo di forma
parallelepipeda ha una massa di 10 kg, che il coefficiente d’attrito tra dita e pezzo è di 0,2; si
desidera un coefficiente di sicurezza pari a due;
il materiale ha una σamm 80 N/cm2.
σc 1 470
N
F
N
0,588
58,8 c
d
S
2 500
mm2
cm2
che risulta minore dalla σamm con un coefficiente
di sicurezza:
x
■
σamm
80
1,36
σc
58,8
Esercizio 2. Forza di serraggio
Determinare la forza di serraggio per lo stesso
corpo dell’esercizio precedente nel caso della figura 13.
Fig. 12.
Soluzione
Oltre alla forza peso P occorre considerare la
forza d’inerzia I dovuta all’accelerazione imposta dal braccio alla pinza; questa è valutabile in
circa 2 g m/s2 e pertanto si ha:
P mg 10 9,8 98 [N]
I ma m2g 10 2 9,8 196 [N]
P I 98 196 294 [N]
Fig. 13.
Questa forza deve essere equilibrata dall’attrito
tra le dita ed il pezzo; si ha:
Soluzione
Valutando, per esempio, un’accelerazione massima a 2g si ha una forza d’inerzia:
AfF
I ma 10 2 9,8 196 [N]
Dobbiamo imporre la condizione di equilibrio
alla traslazione verticale:
2A P I
da cui segue sostituendo A:
2fF P I
ovvero
2 0,2 F 294 [N]
Imponendo la condizione
2A I
ed esplicitandola si ottiene:
2fF I
da cui
F
da cui
196
I
490 [N]
2f
2 0,2
294
735 [N]
0,4
Tenendo conto di un coefficiente di sicurezza
pari a 2 la forza di serraggio è data da:
Applicando lo stesso coefficiente di sicurezza dell’esercizio precedente si ha una forza di serraggio:
F 2 490 980 [N]
F 735 2 1 470 [N]
Essa dà luogo a un coefficiente di sicurezza alla
rottura del pezzo pari a:
F
Con tale valore possiamo effettuare la verifica di
resistenza del corpo; esso è soggetto a una tensione di compressione:
x
σamm
σamm
80 25
2
σc
F
980
ROBOT
INDUSTRIALI
327