Tecnica ed Economia dei Trasporti
A.A. 2006 - 2007
________________________________________________________________________________________________________________________
Capitolo 1:
Le prestazioni dei sistemi di trasporto
__________________________________________________________________________________
1
Tecnica ed Economia dei Trasporti
A.A. 2006 - 2007
________________________________________________________________________________________________________________________
Sommario
Capitolo 1:.................................................................................................................................... 1
Le prestazioni dei sistemi di trasporto ......................................................................................... 1
1.1 - Prestazioni di un veicolo terrestre isolato.................................................................... 3
1.1.1 – Il diagramma rettangolare .................................................................................... 4
1.1.2. - Il diagramma trapezio e il diagramma triangolare (ad accelerazione costante) .. 5
1.2 – Traiettorie di più veicoli.............................................................................................. 9
1.2.1 – Costruzione dei diagrammi (t-x)........................................................................ 10
1.2.2 – Definizione delle caratteristiche dei flussi veicolari .......................................... 11
1.3 – Applicazioni dei diagrammi (t, x)............................................................................ 12
1.3.1 – Teoria del flusso veicolare con traiettorie rettilinee .......................................... 12
1.3.2 – Traiettorie chiuse ............................................................................................... 13
__________________________________________________________________________________
2
Tecnica ed Economia dei Trasporti
A.A. 2006 - 2007
________________________________________________________________________________________________________________________
1.1 - Prestazioni di un veicolo terrestre isolato
I parametri principali che caratterizzano le prestazioni di un veicolo sono:
·
lo spazio di accelerazione e lo spazio di frenatura;
·
la velocità massima, la velocità media e la velocità commerciale;
·
il tempo di avviamento, il tempo di frenatura ed il tempo necessario per coprire una tratta di
data lunghezza;
·
le accelerazioni e le decelerazioni massima e media, ed i relativi contraccolpi (variazioni
delle accelerazioni nel tempo);
·
il consumo energetico.
In questo capitolo si vogliono esplicitare i valori assunti dai parametri sopra ricordati
nell’ipotesi che le caratteristiche del veicolo e della strada siano tali da produrre diagrammi del moto
“tipo”, caratterizzati cioè da una geometria ben definita e dotati di una certa verosimiglianza (nel senso
che possono essere utilizzati per rappresentare diversi sistemi di trasporto quali treno, metropolitane,
autobus).
Si intende così introdurre una serie di definizioni dei parametri prestazionali ed esplicitare le
relazioni analitiche intercorrenti tra essi: nel caso di un veicolo reale non è possibile esprimere tali
relazioni con formule algebriche, ma si può desumerle da una serie ripetuta di diagrammi del moto,
ciascuno caratterizzato da una valore diverso del parametro in funzione del quale si vuole studiare la
variazione degli altri.
Si esamineranno tre casi (diagramma rettangolare, trapezio e triangolo), in progressione per
difficoltà e verosimiglianza, che saranno denominati dalla forma geometrica del diagramma delle
velocità in funzione del tempo.
Per ciascuno di essi si esprimerà la velocità commerciale, quindi il tempo di viaggio e lo spazio
percorso, in funzione dei parametri che possono essere considerati più direttamente determinati dalla
potenza del motore e cioè funzione di:
·
velocità massima vmax;
·
accelerazione am e decelerazione a’m rispettivamente in avviamento e frenatura;
__________________________________________________________________________________
3
Tecnica ed Economia dei Trasporti
A.A. 2006 - 2007
________________________________________________________________________________________________________________________
1.1.1 – Il diagramma rettangolare
Questo diagramma rappresenta il moto di un veicolo che, partendo da velocità nulla all’istante
t = 0, raggiunge istantaneamente la velocità massima Vmax e la mantiene inalterata fino all’istante tc in
cui si arresta di nuovo istantaneamente (Figura 1.1).
L’accelerazione di avviamento e la decelerazione di frenatura sono quindi infinite.
V
Vmax
tc
t
Figura 1.1
Questo tipo di diagramma è molto lontano dalla realtà, ma può essere accettato in prima
approssimazione per i veicoli il cui moto dura per un tempo tanto lungo da poter trascurare, ai fini del
calcolo dello spazio percorso, le fasi di avviamento e di frenatura ( ad es. un treno intercity).
Le equazioni del moto sono quelle del moto uniforme:
v = vmax
(1.1)
s = vmax * t
(1.2)
Lo spazio totale percorso (area sottesa al diagramma v-t), tutto a regime, vale perciò:
sc = vmax * tc
(1.3)
mentre sono nulli lo spazio di accelerazione (lo spazio percorso durante la fase di avviamento) e lo
spazio di frenatura (percorso durante la fase di frenatura).
La velocità massima è costantemente uguale alla velocità media ed ambedue uguali a vmax, la
velocità commerciale è invece data da:
vc =
æ t
ö
sc
= vmax * çç c ÷÷
tc + t D
è tc + t D ø
(1.4)
se con tD si indica il tempo di sosta del veicolo al termine dello spostamento.
Le accelerazioni massima e media e le decelerazioni massime e medie sono tutte infinitamente
grandi essendo nulli i tempi di accelerazione e decelerazione.
Il consumo energetico è il lavoro che occorre compiere perché il veicolo percorra lo spazio sc,
ed è pari a:
sc
L = ò Tds
(1.5)
0
dove con T si è indicato lo sforzo di trazione. Se questo è costante, il consumo energetico è dato da
T*Sc.
__________________________________________________________________________________
4
Tecnica ed Economia dei Trasporti
A.A. 2006 - 2007
________________________________________________________________________________________________________________________
1.1.2. - Il diagramma trapezio e il diagramma triangolare (ad accelerazione
costante)
Nel digramma trapezio il moto può essere suddiviso nelle tre fasi di avviamento, di regime e di
frenatura, come mostrato in Figura 1.2, Figura 1.3 e Figura 1.4.
a
am
ta
tb
tc
t
a’m
Figura 1.2: Diagramma del moto “tipo” trapezio: accelerazione
am = tgα1
v
a’m = tgα2
vmax
α1
α2
ta
tb
tc
t
Figura 1.3: Diagramma del moto “tipo” trapezio: velocità
s
sc
sb
sa
ta
tb
tc
t
Figura 1.4: Diagramma del moto “tipo” trapezio: spazio
Nella fase di avviamento il moto è accelerato con velocità variabile linearmente da zero a vmax
e con accelerazione costantemente pari ad am.
Le equazioni analitiche del moto sono quindi:
am = cost
(1.6)
v = am * t
(1.7)
t
t
a m t 2 vt
v2
s = ò vdt = ò a m tdt =
= =
2
2 2a m
0
0
(1.8)
__________________________________________________________________________________
5
Tecnica ed Economia dei Trasporti
A.A. 2006 - 2007
________________________________________________________________________________________________________________________
Alla fine dell'avviamento la velocità, il tempo (d'avviamento) e lo spazio (d'avviamento)
valgono rispettivamente:
vmax = am * ta
(1.9)
ta = vmax / am
(1.10)
a m t 2 a v max t a v 2 max
=
=
2
2
2a m
sa =
(1.11)
Nella fase di regime il moto è uniforme e valgono le (1.1), (1.2), (1.3), (1.4) per cui si ha, alla
fine della fase:
v = vmax
(1.12)
sb = sa + vmax * (tb – ta)
(1.13)
a=0
(1.14)
La fase di frenatura è del tutto analoga alla fase di avviamento e le espressioni delle
caratteristiche del moto coincidono con quelle prima viste se la variazione di velocità si considera
positiva quando è una riduzione (è, cioè, positiva se coerente con il disegno riportato).
Si ha, perciò, nell'istante generico:
t
t
a = a’m
(1.15)
v = vmax - a’m (t – tb)
(1.16)
t
s - s b = ò vdt = ò v max dt - ò a' m (t - t b )dt =v max (t - t b ) tb
tb
tb
a' m (t - t b ) 2
2
(1.17)
Alla fine della fase si ha perciò:
v = vmax - a’m (tc – tb) = 0
(1.18)
tc – tb = vmax / a’m
(1.19)
sc – sb = v2max / 2a’m
(1.20)
per cui il tempo di frenatura vale:
e lo spazio di frenatura:
Alla fine del moto, per le (1.11), (1.13) e (1.20), lo spazio percorso vale:
sc =
v 2 max
v 2 max
+ v max (t b - t a ) +
2a
2a ' m
(1.21)
ed il tempo necessario, per le (1.10) e (1.19), vale:
tc =
v max
v
+ (t b - t a ) + max
am
a' m
(1.22)
Ricavando (tb – ta) dalla (1.21) e sostituendolo nella (1.22) si ha:
__________________________________________________________________________________
6
Tecnica ed Economia dei Trasporti
A.A. 2006 - 2007
________________________________________________________________________________________________________________________
tb - ta =
sc
v
v
- max - max
v max 2a m 2a ' m
(1.23)
Il secondo e il terzo addendo della (1.23) rappresentano i perditempo in avviamento e in
frenatura e cioè, rispettivamente, le differenze tra i tempi di percorrenza (vmax/am in avviamento e
vmax/a’m in frenatura) ed i tempi che sarebbero stati necessari per percorrere a velocità costante lo
spazio di avviamento (v2max / 2am) e lo spazio di frenatura (v2max / 2a'm), e cioè i tempi vmax / 2am e
vmax / 2a'm.
La velocità media del veicolo, pari al rapporto tra spazio percorso (sc) e tempo impiegato
sull'intero percorso (tc) vale quindi:
vm =
sc
Sc v max v max
+
+
v max 2a m 2a' m
= v max
sc
2
v max v 2 max
+
sc +
2a m
2a ' m
(1.24)
Se si definisce:
v 2 max v 2 max
sp =
+
2a m
2a ' m
(1.25)
come lo spazio perduto, ovvero lo spazio che si sarebbe potuto percorrere a velocità vmax durante i
perditempo in avviamento e in frenatura, il rapporto tra la velocità media e la velocità massima, nel
caso di diagramma trapezio, sarà pari a:
vm
=
v max
sc
(1.26)
sc + s p
Considerazioni analoghe possono essere fatte con riferimento alla velocità commerciale, intesa
come rapporto tra spazio percorso sc, e la somma del tempo di percorrenza tc e del tempo di sosta tD.
Si ha infatti:
vc =
s
tD + C
v max
sc
sc
= v max
v
v
v 2 max v 2 max
+ max + max
v max t D + s c +
+
2a m 2a ' m
2a m
2a ' m
(1.27)
Posto:
v 2 max v 2 max
s s = v max t D +
+
2a m
2a ' m
(1.28)
vc
sc
=
v max s c + s s
(1.29)
si ha:
dove s s è lo spazio che si sarebbe potuto percorrere nei perditempo e durante la sosta se la
velocità fosse rimasta costante e pari al valore massimo.
__________________________________________________________________________________
7
Tecnica ed Economia dei Trasporti
A.A. 2006 - 2007
________________________________________________________________________________________________________________________
Per massimizzare la vm o la vc occorre, a parità di am e a’m, incrementare la vmax (la funzione
1.23 ha derivata rispetto a vmax sempre negativa, motivo per cui un incremento di vmax provoca sempre
un decremento di tc e quindi di vc e di vm) o viceversa, a parità di vmax, incrementare am ed a’m.
Al limite il diagramma trapezio può degenerare in un diagramma triangolare, per il quale le
(1.21) e(1.22) diventano:
st c =
v 2 max v 2 max
+
2a m
2a ' m
(1.30)
ttc =
v max v max
+
am
a' m
(1.31)
Velocità media e velocità commerciale valgono perciò:
vm =
st c
v max v max
+
am
a' m
= v max
stc
= v max
v 2 max v 2 max
+
am
a' m
st c
v 2 max v 2 max
+
sc+
2a m
2a ' m
(1.32)
t
Definendo spazio perso la quantità:
sp =
v 2 max v 2 max
+
2a m
2a ' m
(1.33)
si ha:
vm
st c
= t
v max s c + s tp
(1.34)
Analogamente se si vuole tenere conto del tempo di sosta tD:
vm =
stc
v
v
t D + max + max
am
a' m
(1.35)
Definendo, anche i questo caso, lo spazio perso la quantità:
s st = v max t D +
v 2 max v 2 max
+
2a m
2a ' m
(1.36)
si ha:
vc
st c
=
v max s t c + s st
(1.37)
__________________________________________________________________________________
8
Tecnica ed Economia dei Trasporti
A.A. 2006 - 2007
________________________________________________________________________________________________________________________
1.2 – Traiettorie di più veicoli
L’analisi delle traiettorie dei veicoli isolati ha focalizzato l’attenzione sul fatto che, una volta
note alcune informazioni sul moto del veicolo, è possibile ricavare tutte le informazioni ad esso
relative semplicemente dall’analisi dei diagrammi del moto.
I diagrammi spazio-tempo risultano essere degli strumenti molto utili per analizzare problemi
complessi, come quelli in cui molti veicoli interagiscono tra di loro percorrendo “strade” con diritto di
precedenza.
Possiamo suggerire tre diverse applicazioni:
Aeroplani con diverse velocità di discesa lungo il percorso d’avvicinamento, in condizioni di
distanziamento (ovvero di spazio tra un aeroplano ed il successivo) minimo;
Pianificazione di convogli ferroviari merci (lenti) e passeggeri (veloci) lungo una linea a
binario unico, con zone di scambio predeterminate;
Stima delle distanze di sicurezza per il sorpasso su strade a due corsie, una per senso di marcia,
in funzione delle velocità ed accelerazioni del veicolo sorpassante, di quello sorpassato e di quelli
provenienti in verso opposto.
Anche se molte analisi potrebbero essere condotte anche senza l’ausilio di diagrammi spaziotempo, questi risultano essere utilissimi per la stima degli errori di valutazione che altrimenti si
potrebbero commettere in partenza.
La praticità dei diagrammi spazio-tempo risulta subito evidente se si considera il seguente
problema:
“Tre amici intraprendono un viaggio utilizzando una bicicletta tandem per due sole persone. La
bicicletta, indipendentemente dal numero dei conducenti, può viaggiare a 20 km/h, mentre una persona
a piedi può raggiungere i 4 km/h camminando. L’organizzazione più pratica prevede che i primi due
amici, A e B, partano con la bicicletta, mentre il terzo, C, si incammini a piedi. Dopo alcuni minuti di
percorso l’individuo A fa scendere B, il quale comincia a sua volta a camminare, mentre A torna
indietro con la bicicletta a prendere l’individuo C. A questo punto con la bicicletta sorpassano
l’individuo B e dopo alcuni minuti ricominciano il ciclo: queste operazioni cicliche dovranno essere
ripetute n volte fino a giungere a destinazione.”
Domanda: qual è la loro velocità media di viaggio?
La maggior parte delle persone ha bisogno di più di 10 minuti per risolvere questo problema.
Se invece si disegnano su un diagramma spazio-tempo le traiettorie dei quattro soggetti, ovvero
la bicicletta ed i tre individui, si potrà verificare per semplice ispezione che la velocità media richiesta
è pari a 10 km/h.
Tale soluzione può chiaramente essere raggiunta anche per via analitica, ma l’utilizzo di
diagrammi spazio-tempo aiuta ad impostare nel modo corretto il sistema di equazioni descrittivo del
fenomeno studiato.
Si noti che l’uso dei diagrammi spazio-tempo, da qui in poi denominati (t-x), risulta essere un
valido strumento non solo di gestione dei sistemi di trasporto, ma anche un potente strumento di
verifica dello stato attuale, consentendo a personale addestrato di verificare “a colpo d’occhio” la
presenza di eventuali problemi, dalla semplice lettura dei diagrammi.
__________________________________________________________________________________
9
Tecnica ed Economia dei Trasporti
A.A. 2006 - 2007
________________________________________________________________________________________________________________________
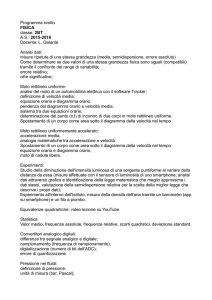
1.2.1 – Costruzione dei diagrammi (t-x)
I criteri di raccolta dei dati differiscono a seconda delle specifiche finalità. Se ad esempio si
hanno informazioni circa la posizione di un autobus pubblico su una linea specifica, è possibile
ricostruire con assoluta facilità le traiettorie di tutti gli altri mezzi sulla linea, e risulta
conseguentemente molto rapido sovrapporre tutte le traiettorie sul medesimo diagramma.
In molti altri casi, come pedoni ed automobili, è conveniente registrare i tempi a cui i mezzi
passano in fissate sezioni di rilevamento.
Noti i tempi di passaggio dei veicoli nelle varie sezioni (x1,……,x4), ed il distanziamento
spaziale (ad es. x3-x2, Figura 1.5), per ricostruire, con dei punti nel diagramma (t-x), le traiettorie è
necessario semplicemente unire i punti relativi ai singoli individui con una linea.
X
x4
x3
p1
p2
p3
x2
x1
T
t
Figura 1.5
Tale procedura è possibile sia in caso di conteggi di tipo manuale, che in caso di rilievo
automatizzato effettuato con sistemi tecnologicamente avanzati, e risulta tanto più preciso quanto più
le sezioni sono ravvicinate, o ubicate in punti in cui la velocità dei mezzi differisce minimamente.
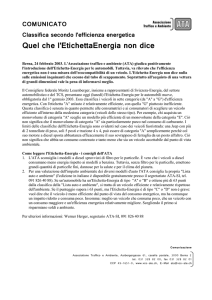
In ambito autostradale, vista la difficoltà di utilizzo dei tradizionali sistemi di rilievo, si ricorre
spesso a sistemi “aerofotogrammetrici”, verificando cioè la posizione ed il distanziamento dei veicoli
attraverso l’uso di fotografie aeree.
Ogni fotografia viene presa ad intervalli di tempo t prefissati (Figura 1.6), a cui sono associate
delle linee verticali nei diagrammi (t-x).
X
L
d2
d1
t1 t2 t3 t4 t5 t6 t7
t8
t
Figura 1.6
Questo metodo di costruzione mostra come i diagrammi (t-x) rappresentino in modo completo
il moto monodimensionale dei veicoli lungo l’infrastruttura, fornendo per ciascun istante di tempo il
posizionamento di ogni mezzo rilevato.
I tempi intercorrenti tra il passaggio di veicoli consecutivi su una sezione di rilevamento
vengono usualmente definiti “intervalli” (pi), mentre le separazioni spaziali tra veicoli ad intervalli di
tempo fissati sono definite “distanziamenti” (di).
__________________________________________________________________________________
10
Tecnica ed Economia dei Trasporti
A.A. 2006 - 2007
________________________________________________________________________________________________________________________
1.2.2 – Definizione delle caratteristiche dei flussi veicolari
Il numero di veicoli, n, rilevati da un osservatore fisso durante un prefissato intervallo di
tempo, diviso per la durata di suddetto intervallo, t, definisce il flusso veicolare passante per la sezione
considerata:
q=n/t
Inoltre risulta chiaro (Figura 1.5) che per osservazioni comprendenti moltissimi veicoli e
protratte nel tempo (n, t → ∞), con intervalli comparabili:
n
T » å pi
(1.44)
i =1
e quindi dividendo entrambi i membri della (1.44) per il numero di veicoli n, si ottiene un’altra
relazione molto importante:
q -1 =
T 1 n
= å pi = p
n n i =1
(1.45)
secondo cui, sotto le condizioni precedentemente esposte, il flusso veicolare in un intervallo è
approssimativamente uguale all’inverso dell’intervallo medio registrato da un osservatore fisso
durante il suddetto intervallo di tempo. Bisogna però notare che questa relazione è esatta se il periodo
di osservazione comincia e finisce prima dell’arrivo di un veicolo.
Una simile valutazione svolta sul numero di veicoli ripreso da una fotografia presa su un certo
tratto di strada di lunghezza L, porta alla definizione del concetto di densità, k = n / L, in base alla
quale si può definire la seguente relazione tra la densità ed il distanziamento spaziale dei veicoli:
k -1 =
L 1 n
= å di = d
n n i =1
(1.46)
__________________________________________________________________________________
11
Tecnica ed Economia dei Trasporti
A.A. 2006 - 2007
________________________________________________________________________________________________________________________
1.3 – Applicazioni dei diagrammi (t, x)
Si presenta nel seguito una applicazione dei diagrammi (t, x) come un’anteprima della teoria
dei flussi di traffico per un caso ideale che, per quanto semplificata, mette in evidenza alcune
interessanti relazioni tra le variabili del deflusso veicolare (flusso, densità e velocità). I diagrammi
(t, x) sono di aiuto allo sviluppo delle relazioni analitiche che descrivono il fenomeno “deflusso”.
1.3.1 – Teoria del flusso veicolare con traiettorie rettilinee
Consideriamo un tratto di strada di lunghezza L, osservata per un periodo di tempo T, ed
assumiamo che i veicoli passino sulla sezione di rilevamento a velocità circa costante senza interferire
gli uni con gli altri. Questo scenario può rappresentare la realtà di autostrade a molte corsie percorse
da un basso flusso veicolare, costituito sia da veicoli veloci che lenti, oppure dai corridoi interni di un
aeroporto in cui solo pochi utenti utilizzano i sistemi come scale mobili o tapis roulant.
Assumiamo inoltre che esistano solo un numero finito di velocità vl assumibili dai veicoli e che
le traiettorie di ciascuna famiglia di veicoli siano rappresentate da rette parallele ugualmente spaziate,
ovvero che ciascuna famiglia l abbia la medesima separazione temporale pl tra due veicoli contigui.
Questo può essere visto chiaramente in Figura 1.7, dove viene rappresentato il caso di due
classi di veicoli l = 1, 2.
V2
p2
x
d2
p1
V1
L
d1
T
Figura 1.7
t
E’ possibile verificare dalla figura che vl = dl /pl per ciascuna classe di veicoli l, dove dl è il
distanziamento di ciascuna classe. Se flussi e densità di ciascuna classe sono definiti in funzione di dl
e pl , (dl=1/kl e pl = 1/ql )è possibile riscrivere la relazione nel modo seguente:
q l » vl * k l
(1.47)
in virtù di quanto riportato in (1.45) ed (1.46). Se la (1.47) viene estesa a tutta la famiglia l, si
otterranno le espressioni di flusso e densità totali:
q = å ql , k = å k l
l
l
e, moltiplicando e dividendo il secondo membro della 1.47 per k, in conclusione:
q = k å vl (k l / k ) = v s k
(1.48)
l
Dove vs è la media delle velocità calcolate rispetto allo spazio.
Il secondo termine della precedente è giustificato notando che la parte centrale del primo
termine della (1.48) definisce una media pesata delle velocità dei veicoli, dove i pesi utilizzati sono le
__________________________________________________________________________________
12
Tecnica ed Economia dei Trasporti
A.A. 2006 - 2007
________________________________________________________________________________________________________________________
percentuali di ciascun tipo di veicolo rilevate con le fotografie aeree (conseguentemente alla
definizione stessa di densità), che possono risultare diverse da quelle rilevabili da un osservatore a
terra (velocità rispetto al tempo “vt”).
Tra le due velocità sussiste la relazione:
vt= vs + σs2 /vs
dove σs è la varianza della velocità vs (ovvero la misura della dispersione delle informazioni rilevate, in
questo caso delle velocità, rispetto ad un valor medio).
La differenza tra le due velocità può essere sintetizzata dall’osservazione della Figura 1.7:
mentre un osservatore a terra vede circa due veicoli veloci per ogni veicolo lento rilevato, un rilevatore
in volo aereo vedrà due veicoli lenti per ciascun veicolo veloce fotografato. Ne segue che l’osservatore
a terra rileva frazioni di veicoli veloci molto maggiori di quelle rilevate dall’osservatore in volo,
indipendentemente dalle velocità, flusso e densità specifiche di ciascuna famiglia di veicoli.
1.3.2 – Traiettorie chiuse
E’ possibile utilizzare i diagrammi (t, x) anche per sistemi con traiettorie chiuse. Se si utilizza
la x per definire la posizione del veicolo all’interno di un circuito (0 ≤ x ≤ L) di lunghezza L, la
traiettoria del veicolo scomparirà non appena questo transiterà per la progressiva x = L, ricomparendo
istantaneamente poco dopo in x = 0. La traiettoria di un veicolo che descrive un circuito chiuso a
velocità costante v, è rappresentata in Figura 1.8.
X
L
0
C
2C
t
Figura 1.8
La figura mostra le traiettorie di 4 veicoli che si muovono lungo un circuito con velocità v,
come nel caso di autobus pubblici che si muovono lungo linee predeterminate. Dalla lettura del
diagramma si possono ricavare i parametri fondamentali della linea, come:
Velocità media della linea:
v=L/C
Flusso veicolare (per ciclo):
q=n/C
Densità veicolare (per ciclo):
k=n/L
Dalle precedenti si possono ricavare anche altre relazioni dipendenti, come v = q / k.
Se ad esempio si hanno tre veicoli su un tratto di circuito di 2 km (k = 1,5) che viaggiano
rispettivamente a vk = 100, 120, 140 km/h, pari quindi ad una velocità media di 120 km/h, il flusso
veicolare rilevato da un osservatore sarà pari a:
q = 120 * 1,5 = 180 veicoli / ora
E’ chiaro, senza dover effettuare alcun calcolo, che l’osservatore a terra rileverà un maggior
numero di veicoli veloci rispetto a quelli lenti, per il semplice fatto che questi si presentano sulla
sezione di rilievo con maggiore frequenza degli altri.
__________________________________________________________________________________
13