Queste note sono da intendersi per uso interno
degli allievi del corso e sono state redatte
sfruttando anche immagini e materiali
tratti da testi vari e da Internet
L'automazione nei processi industriali
Un processo industriale è l‟insieme delle operazioni che concorrono a trasformare le caratteristiche e le
proprietà di materiali, tipi di energia e/o informazioni in accordo con un obiettivo predeterminato.
Un impianto industriale è l‟insieme di macchine, apparecchiature e mezzi necessari al processo industriale.
In un impianto industriale il flusso principale di input-output è sempre accompagnato da un flusso di servizio
necessario al corretto funzionamento dell‟impianto stesso.
Macchina impacchettatrice industriale
Linea di produzione robotizzata
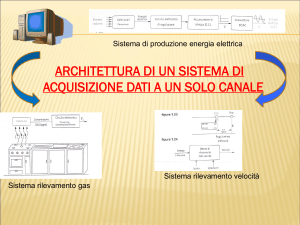
Negli impianti industriali di tipo automatizzato, i processi sono pilotati da un controllore di processo (PCS, “Process
Control System”) costituito da un‟unità di calcolo che genera i comandi necessari al corretto funzionamento
dell‟impianto e ne sorveglia lo stato.
Il controllore di processo in base alle informazioni ricevute dai sensori ed al
programma di processo contenuto nella memoria agisce sull‟impianto attraverso gli attuatori, in modo di soddisfare
le specifiche richieste.
L‟interfaccia bidirezionale tra l‟impianto industriale (o unità operativa), ed il controllore di processo (o unità
operatrice) è costituita dall‟insieme di sensori e di attuatori.
I sistemi singolo ingresso - singola uscita con controllo mediante retroazione dell‟uscita sono fra i più
comuni in campo industriale.
Il sistema da controllare e il controllore possono essere rappresentati mediante le rispettive funzioni di
trasferimento Gs(s) e Gc(s).
Le variabili di sistema sono:
il riferimento da inseguire r(t)
l‟uscita da controllare y(t)
l‟ errore e(t) = r(t)-y(t)
la variabile di controllo u(t)
Il procedimento di sintesi del regolatore in retroazione può essere così riassunto:
I.
Determinazione (analitica o sperimentale) di un modello del sistema da controllare.
Se il sistema è lineare a singolo ingresso e singola uscita è possibile identificare una funzione
complessa a variabile complessa Gs(s) (la cosiddetta funzione di trasferimento) che ne descrive
completamente il comportamento statico e dinamico.
II. Definizione delle specifiche di controllo.
In genere interessa imporre al sistema un errore a regime nullo ed un tempo di assestamento
fissato.
III. Sintesi del controllore.
In base al modello del sistema è possibile, tramite opportune metodologie, progettare i parametri di
un sistema di controllo (rete correttrice, PID, etc.) che garantisca il rispetto delle specifiche
assegnate.
Sintetizzata la legge che il controllore di processo deve elaborare, si passa all‟implementazione pratica.
Per far ciò è necessario definire i dispositivi e le modalità per:
Convertire le grandezze fisiche coinvolte nel processo da controllare in segnali elettrici di piccola
potenza (sensori).
Convertire i segnali elettrici corrispondenti alle variabili fisiche in dati numerici da inviare in
ingresso al controllore di processo (ADC).
Convertire i dati numerici in uscita dal controllore di processo in segnali elettrici (DAC).
Convertire i segnali elettrici corrispondenti alle uscite del controllore in variazioni dello stato del
processo (attuatori).
L‟effettiva implementazione del sistema di controllo comporta quindi due ulteriori passi:
IV. Selezione dei dispositivi
Il progettista deve scegliere quali sensori, attuatori, quale calcolatore (programmato in quale
linguaggio), occorre utilizzare per implementare efficacemente l‟algoritmo di controllo.
V.
Verifica delle specifiche reali
Il sistema ottenuto differisce dal modello ideale rappresentato dall‟anello chiuso in retroazione per
svariate ragioni (discretizzazione, dinamiche non modellate di sensori e trasduttori, ecc.), quindi
occorre riconsiderare il progetto per tenere conto di questa nuova situazione.
Il corso di “Sensori ed Attuatori” ha lo scopo di introdurre alcuni argomenti relativi alle tecnologie ed ai
dispositivi utilizzati per la realizzazione pratica dei sistemi di controllo, ad integrazione delle nozioni
teoriche fornite dai corsi di base di Automatica, Elettronica ed Informatica.
Computer Integrated Manufacturing
Con Computer Integrated Manufacturing (CIM) si intende una metodologia di impiego articolato e cooperante
delle tecnologie informatiche nei processi di progettazione, produzione e distribuzione di beni e servizi.
La metodologia CIM viene implementata in tutti quegli ambiti in cui le funzioni dell‟impresa possono essere
assistite da un elaboratore e controllate da esso (dunque ottimizzate) con un alto livello di integrazione.
La metodologia CIM si esplica a più livelli del processo produttivo; per visualizzare tutti questi livelli è
convenzione far riferimento alla cosiddetta “piramide CIM”.
Ad ogni livello della piramide CIM vengono eseguite tre categorie di funzioni ase comuni:
Gestione dal livello superiore, ossia scomposizione dei comandi ricevuti in sottocompiti;
Gestione del proprio livello, cioè assegnazione dei sottocompiti e delle risorse e attuazione dei
sottocompiti del livello;
Gestione verso il livello inferiore: assegnazione dei sottocompiti e delle risorse ed analisi delle
informazioni di risposte ricevute dal livello inferiore.
Livello 0: Processi industriali
E‟ costituito dalla struttura fisica dei processi, cioè dai dispositivi che rendono possibili le azioni di movimento,
lo scorrere di flussi di energia, le reazioni chimiche.
Livello 1: Sensori ed attuatori
E‟ costituito dall‟insieme dei sensori, degli attuatori e dei trasduttori, cioè dai dispositivi che vengono
interfacciati direttamente alla struttura fisica del processo, costituendo la sezione di input-output dal sistema
di controllo. La funzione di tale livello è quella di riportare al livello 2 lo stato delle variabili di processo e di
attuare i comandi da esso ricevuti. Il livello di intelligenza richiesto è basso, dovendo i dispositivi coinvolti
soltanto trasdurre le grandezze fisiche di varia natura in segnali tipicamente elettrici (e viceversa).
Livello 2: Unità operatrici
E‟ costituito dai controllori (di tipo automatico e/o semiautomatico) interfacciati con i sensori e gli attuatori dei
dispositivi meccanici facenti parte della stessa unità operatrice. Le apparecchiature di tale livello sono :
PLC (Programmable Logic Controller), ossia controllori a logica programmabile;
DCS (Distribuited Control System), ossia semplici sistemi di controllo distribuito;
CNC (Computer Numeric Controller), cioè centri di lavorazione a controllo numerico.
Le funzioni svolte sono la regolazione diretta delle variabili, la realizzazione sequenziale di operazioni e di
interblocchi, ecc. Tali operazioni non sono in genere molto complesse, ma devono essere coordinate con
quelle eseguite da altre unità operatrici mediante il controllo di livello superiore.
Gran parte delle informazioni tra i vari livelli, sono veicolate da bus di comunicazione, che svolgono un
ruolo indispensabile per l‟integrazione dei diversi componenti dei sistemi di produzione industriale.
Sensori
I sensori sono dispositivi che rilevano una grandezza fisica e la convertono in un formato adatto
alla elaborazione elettronica. Grazie alle informazioni sul processo acquisite dai sensori, l‟unità di
governo mantiene traccia dello stato di funzionamento della parte operativa.
I sensori si possono classificare in base al tipo di segnale che forniscono in:
sensori analogici: forniscono un segnale elettrico continuo compreso in un certo intervallo
di valori (per es. sensori di temperatura, sensori di pressione, ecc...). Quando l‟unità di
governo è implementata da un elaboratore elettronico occorre utilizzare un dispositivo di
conversione del segnale dal formato analogico a quello digitale (Convertitore Analogico–
Digitale, A/D).
sensori digitali: forniscono una informazione direttamente utilizzabile da un elaboratore
elettronico.
I sensori digitali possono essere suddivisi in base al contenuto informativo dei segnali digitali forniti in:
Sensori logici: hanno una uscita di tipo booleano, codificata usualmente con la cifra “1” (vero, presenza) e “0”
(falso, assenza). Tipici sensori logici sono i sensori che segnalano il fine–corsa di un movimento, la presenza–
assenza di un pezzo da lavorare, ecc... .
Sensori codificati: forniscono una informazione di tipo numerico intrinsecamente discretizzata ed
opportunamente codificata in una stringa di bits (es. contatori di impulsi, ecc.).
I dispositivi con sensore analogico e convertitore A/D integrato non sono sensori codificati, in quanto la risoluzione
della parte di conversione può essere aumentata a piacere mantenendo la parte di misura inalterata, cosa
impossibile per un sensore per sua natura codificato.
Sensori
Posizione
Temperatura
Potenziometro
Trasformatore differenziale – LVDT
Resolver
Encoder
TermocoppieTermoresistenza - RTD
Termistori
Sensori a Circuito Integrato
Corrente
Velocità
Dinamo Tachimetrica
Deformazione
Estensimetro
Forza, Coppia e Pressione
Estensimetri su strutture meccaniche
A shunt resistivo
Ad effetto Hall
Tecnologie Realizzative
•
Tradizionale (resistivi, capacitivi, induttivi)
•
A semiconduttore (dispositivi integrati, funzionamento limitato in temperatura, basso costo)
•
Optoelettronica (ambienti aggressivi, vasto range di temperature ma limite di sensibilità, il costo può
essere alto)
Attuatori
Gli attuatori sono dispositivi che consentono di trasformare in modo controllato una
energia “sorgente” (elettrica, pneumatica o idraulica) in un‟altra forma di energia
(solitamente meccanica).
Gli attuatori in generale si distinguono in classi differenti in base a:
ENERGIA CONVERTITA
idraulica
pneumatica
elettrica
VARIABILI CONTROLLATE
spostamento
forza
velocità
composto
funzionale (programmabile)
TIPO DI MOVIMENTO
lineare-rettilineo
rotativo
TIPO DI CONTROLLO
ad anello aperto
ad anello chiuso
Attuatori idraulici
Attuatori Pneumatici
Attuatori Elettrici
Terminologia e definizioni generali
L‟obiettivo di un sistema di misura è quello di fornire al sistema di controllo un‟indicazione sullo stato di un
sistema fisico.
Il modo più semplice per misurare una grandezza è quello di eseguire un confronto con un campione
predefinito.
Molto spesso il metodo di misura diretta per confronto non è in pratica applicabile, in tal caso è necessario
eseguire una misura indiretta, trasformando la grandezza da misurare in un‟altra più facilmente
confrontabile con un campione.
La misura indiretta richiede un elemento, il sensore, che modifica la natura fisica della grandezza da
misurare producendo un segnale (in genere elettrico) univocamente legato alla grandezza iniziale, ma più
adatto ad eseguire le operazioni di confronto e di elaborazione della misura.
Terminologia e definizioni generali
La definizione di sensore data dall‟ International Electrotechnical Commission (IEC) è:
“L‟elemento primario di una catena di misura che converte la variabile d‟ingresso in un segnale adatto alla misura”
Terminologia e definizioni generali
La definizione di trasduttore data dall‟ International Electrotechnical Commission (IEC) è:
“Dispositivo che accetta un‟informazione nella forma di una variabile fisica (variabile d‟ingresso) e la trasforma in una
variabile d‟uscita della stessa o di diversa natura in accordo con una legge nota”
Il trasduttore quindi può essere identificato con l‟intera catena di misura, mentre il sensore è il primo elemento della
stessa catena di misura.
In molti casi la distinzione tra sensore e trasduttore non è così netta e molto spesso nella letteratura tecnica e nella
pratica comune i due termini sono utilizzati come sinonimi.
Terminologia e definizioni generali
Le grandezze fisiche oggetto di misura da parte dei trasduttori possono essere classificate in:
grandezze continue, che possono assumere valori continui all‟interno di un certo intervallo (es.
temperatura di un utensile, velocità di rotazione di un motore, ecc...).
grandezze discrete, che assumono un insieme discreto di valori (es. verso di rotazione di un motore,
numero di pezzi lavorati al minuto, ecc...).
Le informazioni associate alle grandezze fisiche sono dette segnali.
le grandezze continue sono descritte da segnali analogici.
[
segnali logici, nel caso si abbiano due valori
ammissibili
le grandezze discrete sono descritte da:
segnali codificati, se il numero di valori ammissibili è
superiore a due
Terminologia e definizioni generali
Il principio di funzionamento di un sensore è basato su una legge fisica nota che regola la relazione tra la
grandezza fisica da misurare e una grandezza elettrica d‟uscita.
Un esempio di sensore è la termoresistenza (sensore di temperatura).
La resistività si modifica al variare della temperatura.
R
Vm
I ref
1
1
l
S
1
1
c
1
1
R R1
R1
Per poter acquisire il segnale occorre fornire una corrente (o una tensione) e misurare poi la tensione
(corrente) generata.
Classificazione dei sensori
In base alla grandezza da misurare
In base al principio fisico utilizzato
Classificazione dei sensori
In base alle caratteristiche energetiche:
Sensori attivi: convertono direttamente l‟energia dell‟ ingresso in energia di uscita, senza
l‟ ausilio di sorgenti esterne.
Sensori passivi: richiedono una sorgente esterna di energia.
Classificazione dei sensori
In base al tipo di segnale che forniscono:
sensori analogici: forniscono un segnale elettrico continuo a risoluzione infinita, l‟uscita cioè può
assumere infiniti valori all‟interno di un dato intervallo.
sensori digitali: forniscono una informazione di tipo numerico con risoluzione finita, l‟uscita cioè può
assumere solo un numero finito di valori all‟interno di un dato intervallo.
Sensori logici: hanno una uscita di tipo booleano, codificata usualmente con la cifra “1”
(vero, presenza) e “0” (falso, assenza).
Sensori codificati: hanno un‟uscita numerica codificata in una stringa di bits.
Errori di acquisizione del segnale
L‟operazione di acquisizione del segnale da parte di un trasduttore è inevitabilmente affetta da errori
dovuti alla non idealità del componente e della catena di amplificazione ed acquisizione del segnale
stesso.
Si intendono per errori le cause che fanno si che l‟indicazione della misura non corrisponda esattamente
alla grandezza da misurare.
Gli errori possono essere classificati come:
Errori sistematici - Un errore è sistematico se, fissate le condizioni sperimentali, in grandezza e
segno ha la stessa influenza sul risultato della misura.
Errori casuali - Errori la cui influenza sulla misura può cambiare in grandezza e segno se si
ripete la procedura di misurazione. (Le condizioni ambientali sono sorgenti di errori casuali se
non vengono monitorate o se non si conosce la loro influenza sulla grandezza da misurare,
diversamente possono essere sorgenti di errore sistematico).
Errori grossolani - Errori che riguardano l‟operatore o guasti dello strumento.
Caratteristiche metrologiche dei trasduttori.
Le caratteristiche di funzionamento dei trasduttori possono essere raggruppate in tre categorie.
Caratteristiche statiche - Si riferiscono a condizioni di funzionamento in cui viene variata molto lentamente la
variabile di ingresso del sensore, registrando la corrispondente variabile di uscita.
Caratteristiche dinamiche - Se la variabile di ingresso varia velocemente l‟uscita può evidenziare
un‟attenuazione rispetto alla caratteristica statica ed un ritardo. La caratteristica dinamica del trasduttore
pone un limite alla banda passante di tutto il sistema di controllo.
Specifiche statistiche ed ambientali - E‟ praticamente impossibile realizzare un dispositivo che operi per un
tempo illimitato, mantenendo costanti le proprie caratteristiche e il cui funzionamento non venga influenzato
da altre grandezze fisiche oltre quella misurata. Ad esempio la temperatura o l‟umidità.
Specifiche statiche
Range di ingresso e d‟uscita
Linearità
Errore di offset
Errore di soglia
Errore di guadagno
Errore di isteresi
Risoluzione
Sensibilità
Precisione
Accuratezza
Deriva
Caratteristica statica
La caratteristica statica di un trasduttore è definita da una funzione del tipo:
dove il segnale X rappresenta il segnale di ingresso e Y il segnale di uscita dal trasduttore.
La caratteristica è definita su di un intervallo finito chiamato campo di ingresso avente estremi Xm e
XM ed ha valori sul campo di uscita (output range o span) con estremi Ym e YM.
Si definiscono:
Range d‟ingresso: Xs = XM - Xm
Range d‟uscita:
Ys = YM - Ym
E‟ necessario selezionare opportunamente i range d‟ingresso e d‟uscita del trasduttore in funzione
rispettivamente dei valori assunti dalla grandezza da misurare e delle specifiche del sistema di
calcolo, per assicurare livelli ottimali di sensibilità e risoluzione ed evitare danni al trasduttore.
Caratteristica statica
La caratteristica statica di un sensore deve avere idealmente un andamento lineare. La costante di
proporzionalità fra valori di ingresso e di uscita viene chiamata guadagno (K) del trasduttore.
I trasduttori commerciali hanno una caratteristica statica reale che si differenzia da quella ideale a
causa di inevitabili imperfezioni costruttive. La qualità di un sensore si misura in base a quanto la
caratteristica reale si scosta da quella ideale.
Linearità
La linearità di un trasduttore può essere definita in diversi modi, non del tutto equivalenti.
Secondo la definizione rigorosamente matematica, un sistema é lineare se la sua caratteristica
soddisfa le proprietà additiva ed omogenea, vale a dire se la sua caratteristica Y = f(X) soddisfa la
seguente eguaglianza:
Per un trasduttore lineare la relazione tra la grandezza
descrivibile attraverso una semplice relazione matematica:
essendo K il guadagno del trasduttore.
fisica misurata e il segnale in uscita è
Errore di linearità
L‟errore di linearità è la massima deviazione dell‟uscita del trasduttore rispetto alla caratteristica
lineare che approssima al meglio la caratteristica reale
Errore di linearità
Tale caratteristica lineare viene normalmente ottenuta secondo il metodo dei minimi quadrati, cioè si
cerca quella retta r(X) che minimizzi la quantità:
Indicando con
linearità vale:
Y il massimo scostamento dalla caratteristica lineare, l‟errore percentuale di non
Errore di Offset
L‟errore di Offset (o di fuori zero) è il valore d che assume l‟uscita del trasduttore (Yo) quando la
grandezza da misurare è nulla.
Errore di Offset
La caratteristica di un trasduttore con offset non è lineare, anche se è definita tramite una retta, infatti,
se si considerano due grandezze fisiche in sequenza X1 e X2 , la lettura della grandezza pari alla
somma di X1 e X2 :
è differente rispetto alla somma delle letture del trasduttore:
Per rendere lineare la caratteristica occorre eliminare il termine di “offset” d dalla caratteristica del
trasduttore:
Errore di soglia
L‟errore di soglia corrisponde al più basso livello di segnale rilevabile dal sensore. Esso non sempre
coincide con lo zero della grandezza da misurare.
Per rendere lineare la caratteristica occorre eliminare il termine di “soglia” s dalla caratteristica del
trasduttore:
Errore di guadagno
L‟errore di guadagno è la differenza tra il guadagno della caratteristica ideale del trasduttore (K) e il
guadagno della retta (K1) che approssima al meglio la caratteristica reale del trasduttore.
L‟errore di guadagno è solitamente espresso in percentuale:
Errore di isteresi
Il fenomeno dell‟isteresi si manifesta nel caso in cui la caratteristica del trasduttore risulta differente
nella situazione in cui la grandezza da acquisire risulta crescente rispetto al caso in cui sia
decrescente.
L‟errore di isteresi è la massima differenza tra le uscite del trasduttore a parità di grandezza in
ingresso, valutate in un primo caso per valori crescenti e in un secondo per valori decrescenti.
Campionamento e Quantizzazione
Il calcolatore di processo opera su dati numerici è quindi necessario trasformare il segnale analogico
da misurare in una sequenza di valori numerici. Ciò viene fatto automaticamente dai sensori digitali
codificati mentre è necessario utilizzare un sistema di conversione analogico/digitale nel caso di
sensori analogici.
Un segnale analogico ha la caratteristica di essere continuo nel tempo ed assumere valori continui
all‟interno di un certo intervallo.
Campionamento e Quantizzazione
Il calcolatore di processo impiega un certo intervallo di tempo per elaborare i segnali di ingresso, e
quindi non può seguire l‟evolversi continuo del segnale analogico, ma dovrà acquisire campioni del
segnale analogico ad istanti discreti di tempo.
Questa operazione viene detta campionamento del segnale.
Campionamento e Quantizzazione
Il segnale campionato assume valori continui, e quindi teoricamente infiniti, mentre il calcolatore può
rappresentare un numero finito di valori in base alla massima dimensione di parola rappresentabile
dall‟unità aritmetica.
Occorre eseguire una operazione di approssimazione del valore campionato al più vicino valore
rappresentabile dal calcolatore. Tale operazione viene detta quantizzazione del segnale.
Errore di Quantizzazione
L‟informazione associata alla grandezza analogica campionata e quantizzata viene detta segnale
digitale.
L‟operazione di campionamento non produce in via teorica un degrado dell‟informazione
associata al segnale (se si rispettano le condizioni del teorema del campionamento),
L‟operazione di quantizzazione comporta inevitabilmente l‟introduzione di un errore sul
segnale acquisito.
Se YM e Ym sono rispettivamente il massimo ed il minimo valore assunto dal segnale Y in uscita dal
trasduttore, l‟intervallo di valori Ys che l‟uscita Y può assumere (output range o span), è dato da:
Rappresentando il segnale di uscita del trasduttore Y mediante una codifica binaria a N bits
(quantizzazione), ogni singolo bit corrisponde ad un valore detto LSB (o “bit meno significativo”) pari
a:
Errore di Quantizzazione
L‟LSB corrisponde al valore minimo rappresentabile dalla codifica digitale, viene anche chiamato
quanto e rappresentato dal simbolo q.
A causa della quantizzazione, tutti i valori di Y compresi all‟interno di un LSB sono rappresentati da
una unica codifica digitale Yd, e quindi l‟errore di quantizzazione è pari a:
Errore complessivo
Tutte le possibili sorgenti di errore vanno considerate nella valutazione dell‟errore complessivo sul
segnale d‟uscita del trasduttore:
L‟errore sul segnale in uscita del trasduttore non è significativo se rimane inferiore all‟errore di
quantizzazione, cioè se:
Risoluzione e Sensibilità
La risoluzione di un trasduttore è pari all‟errore di quantizzazione e corrisponde alla più piccola
quantità che può essere misurata; ovvero alla minima variazione dell'ingresso che provoca
un'apprezzabile variazione in uscita.
La sensibilità di un trasduttore è definita come la massima variazione dell‟uscita rapportata alla
massima variazione dell‟ingresso:
Occorre porre attenzione a non confondere la risoluzione e la sensibilità di un trasduttore.
La
definizione di sensibilità non tiene conto del segnale minimo o dalla minima variazione di segnale
misurabile, informazione che invece è contenuta nella definizione di risoluzione.
Precisione ed Accuratezza
Può accadere che ripetendo lo stesso esperimento più volte il sensore non fornisca l‟identico
risultato.
La precisione di un trasduttore è una misura di quanto la sua uscita sia ripetibile su ripetuti
esperimenti.
La precisione di un sensore è indicata fornendo un intervallo di errore massimo (± errore), oppure una
percentuale di errore rispetto al campo di uscita:
dove eMAX rappresenta la variazione massima di lettura del trasduttore in corrispondenza dello stesso
valore della grandezza misurata.
Precisione ed Accuratezza
L‟accuratezza è una misura di quanto l‟uscita del trasduttore si scosta da quella che dovrebbe essere
l‟uscita ideale, cioè quella uscita che avrebbe un trasduttore ideale che misurasse la stessa
grandezza di quello reale.
L‟accuratezza viene espressa in percentuale rispetto al valore ideale:
Precisione ed Accuratezza
L‟accuratezza non va confusa con la precisione: l‟accuratezza ci fornisce un indice di quanto il
trasduttore dia una indicazione fedele al valore vero della variabile che si vuole misurare, la precisione
ci fornisce una misura di quanto l‟uscita del sensore sia ripetibile.
La distinzione tra errori sistematici ed errori casuali si riflette sulla distinzione tra accuratezza e
precisione.
L‟accuratezza è influenzata da tutti gli errori,
La precisione è influenzata solo dagli errori casuali (quelli sistematici non contribuiscono infatti alla
variazione dei risultati).
Precisione ed Accuratezza
Preciso - Non accurato
Non preciso - Accurato
Preciso - Accurato
Non preciso - Non accurato
Deriva
Si definisce deriva la possibile variazione nel tempo della caratteristica statica di un sensore
(staratura).
Si può verificare sia una deriva di zero che una deriva di sensibilità. Nel primo caso si ha lo
spostamento verticale della caratteristica d‟uscita, nel secondo cambia il coefficiente angolare.
Caratteristica dinamica.
Il trasduttore è un sistema fisico avente necessariamente un comportamento dinamico che si
evidenzia quando la sua grandezza di ingresso varia rapidamente.
Il comportamento dinamico del trasduttore, come ogni altro sistema fisico, può essere descritto nel
dominio del tempo oppure nel dominio delle frequenze.
Massima sovraelongazione
Tempo morto
Tempo di salita
Tempo di risposta
Slew-rate
Risposta in frequenza
Distorsione
Risposta nel dominio del tempo
Si suppone di fornire al trasduttore un ingresso a gradino e quindi di registrare la sua uscita Y (t).
Risposta nel dominio del tempo
Le specifiche dinamiche in questo caso possono essere fornite mediante:
Massima sovraelongazione, nel caso in cui l‟uscita superi durante il transitorio il valore di
regime.
Tempo morto (dead-band), tdb: intervallo di tempo che va dall‟inizio del gradino in ingresso
all‟istante nel quale l‟uscita è pari al 10% del valore di regime.
Tempo di salita (rise time), ts: tempo che impiega l‟uscita a passare dal 10% al 90% del suo
valore di regime y0.
Tempo di assestamento o Tempo di risposta (settling time), ta: tempo necessario all‟uscita ad
assestarsi in un intervallo centrato nel valore di regime di ampiezza p% (5% oppure 10%)
Slew-rate: valore limite della variazione dell‟uscita nell‟unità di tempo.
Risposta nel dominio delle frequenze
La risposta in frequenza di un trasduttore si definisce attraverso i diagrammi di ampiezza e di fase
della risposta del trasduttore quando l‟ingresso ha un andamento sinusoidale.
Diagrammi di ampiezza e fase della risposta in frequenza di un trasduttore ideale
Risposta nel dominio delle frequenze
Quando la sinusoide di ingresso ha una pulsazione maggiore di un valore limite, allora l‟uscita
incomincia a non essere più in grado di seguire l‟ingresso. Tale valore prende il nome di pulsazione di
taglio del trasduttore.
Solitamente si prende come soglia la pulsazione ω3db in corrispondenza alla quale il sistema risponde
con una uscita che è inferiore di 3 db alla risposta a pulsazione nulla:
Risposta del sensore nel dominio delle frequenze
In pratica la risposta nella banda passante non è ideale, ed è
diagramma dell‟ampiezza.
caratterizzata da ondulazioni del
Risposta del sensore nel dominio delle frequenze
L‟effetto di tali ondulazioni è quello di modificare anche la caratteristica statica del trasduttore, il cui
guadagno infatti si trova a dipendere dalla frequenza del segnale.
Distorsione
Un andamento non ideale del diagramma di fase può provocare la distorsione del segnale.
Si consideri un segnale composto dalla somma di due sinusoidi, una a frequenza fs, l‟altra a
frequenza 3fs.
Distorsione
Se il trasduttore ha una risposta in frequenza per la quale i segnali alle due frequenze vengono
ritardati entrambi di una quantità costante, il segnale rilevato è distorto.
Distorsione
Utilizzando un trasduttore dalla caratteristica ideale il segnale a frequenza tripla viene ritardato di una
quantità tripla rispetto all‟altro, di conseguenza il risultato non è distorto.
Specifiche Statistiche e Funzionali
Vita utile
Affidabilità
Costo, dim. e peso
Impedenza (in/out)
Sensibilità ai fattori ambientali
•
temperatura max/min
•
tempo di warm-up
•
umidità relativa pressione max
•
presenza di gas, fumi
Vita utile del trasduttore
E' il periodo di tempo per il quale è previsto che il trasduttore operi senza modificare le sue
prestazioni.
Affidabilità
E‟ l‟attitudine del sensore a fornire specificate prestazioni sotto determinate condizioni e per un certo
periodo
L‟affidabilità del trasduttore si misura statisticamente fornendo l‟MTBF (Mean Time Between Failure),
cioè il periodo di tempo medio che precede un guasto del dispositivo.
Taratura
L„operazione di taratura di un trasduttore corrisponde con la misurazione della grandezza di uscita per
valori noti della grandezza di ingresso al trasduttore stesso.
Per ciclo di taratura si intende una prova che copra tutto il campo di misura del trasduttore; la prova
viene suddivisa in due parti, una per valori crescenti della grandezza e l'altra per valori decrescenti.
Sensori di posizione di tipo resistivo
I sensori di posizione di tipo resistivo sono comunemente detti potenziometri e convertono la
grandezza da misurare (posizione lineare o angolare) in una variazione di resistenza.
Il principio di funzionamento è basato sulla variazione di resistenza in un circuito elettrico prodotta da
una variazione di geometria del sensore, determinata a sua volta dallo spostamento dell‟oggetto di cui
si vuole misurare la posizione mediante un contatto strisciante.
Sensori di posizione di tipo resistivo
Costruttivamente si tratta di un dispositivo in cui un cursore mobile è libero di scorrere su di un
resistore fisso, realizzato a filo avvolto o a film.
Nel primo caso l‟elemento resistivo è costituito da un filo di leghe a base di Nichel–Cromo
e può essere applicato ad una faccia del supporto o avvolto attorno ad esso.
Nel secondo caso, l‟elemento resistivo viene realizzato per deposito di un materiale
metallico su un supporto di plastica, oppure utilizzando un materiale ceramico conduttivo
(Cermet).
Il potenziometro è un sensore passivo, in quanto per ricavare una informazione elettrica utile occorre
inserirlo in un circuito in cui sia presente una sorgente di alimentazione ausiliaria.
Sensori di posizione di tipo resistivo
Il potenziometro è un sensore di tipo assoluto ed è disponibile sia in versione lineare che rotativa.
Sensori di posizione di tipo resistivo
Se 0 ≤ x ≤ 1 è la variabile che indica la posizione del cursore espressa come frazione del campo di
variazione di posizione complessiva (campo di ingresso del sensore), il potenziometro si comporta
come un partitore resistivo di tensione con valori di resistenze pari a (1 - x)Rt e xRt.
La tensione d‟uscita è quindi proporzionale alla tensione di alimentazione e ed alla posizione x del
cursore mobile:
Sensori di posizione di tipo resistivo
In un potenziometro a filo la tensione d‟uscita è costante fintantoché il contatto strisciante è a contatto
con una spira, ma subisce un salto quando il contatto passa da una spira all‟altra.
La risoluzione di un potenziometro a filo dipende dal numero e dalla spaziatura delle spire e cresce al
crescere della resistenza totale perché si ha un numero maggiore di spire.
La risoluzione di un potenziometro a film è apparentemente infinita, in realtà è limitata dalla granularità
residua del film e dalle incertezze del contatto.
Sensori di posizione di tipo resistivo
La precisione e l‟accuratezza del sensore dipendono dalla stabilità della tensione di alimentazione, è
quindi necessario utilizzare un generatore che garantisca caratteristiche migliori della precisione che
si desidera ottenere nella misura.
Un valore elevato della tensione di alimentazione produce un buon rapporto segnale/rumore, tuttavia
produce anche maggior riscaldamento (autoriscaldamento) del potenziometro per effetto Joule.
Questo comporta temperature di esercizio più elevate, che possono portare alla variazione della
resistenza nominale del potenziometro ed allo scadimento della precisione .
La portata di un potenziometro può essere aumentata incrementando le dimensioni del sensore, ciò
comporta però una diminuzione della sensibilità s che dipende dalla tensione di alimentazione E0 e
dall‟escursione massima del cursore l0. Si ha infatti:
All‟aumentare di l0 la sensibilità diminuisce, ciò potrebbe essere compensato da un aumento di E 0, ma
col rischio di ridurre la precisione a causa del riscaldamento del filamento dovuto alla maggiore
corrente.
Sensori di posizione di tipo resistivo
Il potenziometro ha una impedenza di uscita rilevante, che deve essere tenuta in conto in modo da
evitare errori di misura dovuti a problemi di interfacciamento con i circuiti elettronici di amplificazione
e condizionamento.
Infatti, detta Ri l‟impedenza di ingresso di un amplificatore messo in cascata al potenziometro il
partitore resistivo modulato dalla posizione del cursore, si modifica a causa del parallelo tra le
resistenze xRt e Ri, producendo una tensione di uscita dal dispositivo pari a:
Sensori di posizione di tipo resistivo
L‟impedenza d‟uscita elevata del sensore produce anche una estrema sensibilità ai disturbi
elettromagnetici, in quanto il tratto di conduttore tra il sensore e il circuito di amplificazione funziona
da “antenna” per i disturbi elettromagnetici ambientali.
Il potenziometro è un dispositivo economico ma poco affidabile a causa del contatto strisciante che
può deteriorarsi e risentire di vibrazioni e shock meccanici.
E` oggi molto utilizzato in applicazioni automobilistiche mentre è scarsamente utilizzato nelle
macchine automatiche per misurare posizioni di parti importanti o critiche.
Sensori di posizione di tipo magnetoresistivo
Per eliminare i problemi causati dalla presenza dei contatti striscianti sono stati sviluppati potenziometri
„contactless‟ che sfruttano l‟effetto magnetoresistivo, cioè il fenomeno per cui la resistività di alcuni
materiali ferromagnetici policristallini varia quando tali materiali percorsi da corrente sono investiti da un
campo magnetico v.
Applicando un piccolo campo magnetico H ortogonale alla direzione della corrente si ha una variazione
quasi lineare della resistività al variare dell‟intensità del campo magnetico.
Sensori di posizione di tipo magnetoresistivo
Se la posizione del magnete è simmetrica rispetto alle due sezioni dell‟avvolgimento, la tensione tra i
terminali 1 e 2 è metà della tensione tra 1 e 3 (tensione di alimentazione). A seconda che il magnete si
sposti verso una delle due sezioni viene generato un aumento od una diminuzione della tensione tra i
terminali 1 e 2.
Sensori di posizione di tipo capacitivo
Un sensore capacitivo è un sensore assoluto di posizione (lineare o angolare) che sfrutta la variazione
di capacità tra due elettrodi piani.
Pur essendo simile in termini di funzionalità ed applicazioni ai potenziometri, ha il vantaggio di non
possedere contatti striscianti, ciò migliora notevolmente la precisione e l‟affidabilità del sensore.
Per un condensatore ad elettrodi a facce piane parallele, la capacità vale:
dove
è la costante dielettrica, S la superficie affacciata dei due elettrodi e d la distanza tra i due
elettrodi.
Il sensore capacitivo converte la variazione della grandezza da misurare (posizione lineare o angolare)
in una variazione di capacità facendo variare:
la distanza tra gli elettrodi.
la posizione del dielettrico rispetto agli elettrodi
la superficie affacciata dei due elettrodi.
Sensori di posizione di tipo capacitivo
La capacità di un sensore capacitivo in cui sia variabile la distanza tra gli elettrodi vale idealmente:
ove d0 è la distanza iniziale tra gli elettrodi ed x lo spostamento dalla posizione iniziale.
Questo approccio non è mai utilizzato in pratica per la realizzazione di sensori di posizione (mentre è
utilizzato per la realizzazione di sensori di pressione) perché la legge che lega lo spostamento alla
variazione di capacità non è lineare.
Sensori di posizione di tipo capacitivo
La capacità di un sensore capacitivo in cui sia variabile la posizione del dielettrico vale idealmente:
ove:
La capacità diminuisce linearmente con lo spostamento.
La sensibilità del sensore vale:
Sensori di posizione di tipo capacitivo
Se i due elettrodi a facce piane sono sfalsati di un angolo , la superfice affacciata vale:
La capacità di un condensatore variabile di tipo rotativo vale idealmente:
essendo:
Sensori di posizione di tipo capacitivo
La capacità diminuisce linearmente con lo spostamento.
La sensibilità del sensore vale:
Il campo di misura tipico di un Rotary Capacitive Displacement Transducer (RCDT) è inferiore
all‟angolo giro (circa 300°). Al di fuori del campo di misura nominale la misura non è attendibile e varia
non linearmente.
Sensori di posizione di tipo capacitivo
Le variazioni di capacità possono essere trasformate in segnali di tensione con un circuito a ponte.
La tensione V sul ponte vale:
V
Nelle condizioni iniziali (CX=C0)
CX
C1 C X
R1
R1 R2
V
V| è nulla se:
C0
C1
R1
R2
scegliendo C1 , R2 ed R1 in modo da soddisfare la precedente relazione, ed inoltre C1 >> Cx si ha:
V
C0 K θ
C1 C X
R1
R1 R2
V
K θ
V
C1
Sensori di posizione di tipo capacitivo
Le variazioni di capacità possono essere trasformate in segnali di tensione anche con un oscillatore a
frequenza variabile.
Il sensore capacitivo è inserito in un circuito oscillante e ne determina la frequenza di risonanza.
Per piccole variazioni di capacità, sviluppando in serie, si ha:
essendo:
Il circuito PLL genera una tensione continua proporzionale alla frequenza del segnale d‟ingresso.
In alternativa utilizzando un contatore d‟impulsi è possibile avere un dato numerico.
Sensori di posizione di tipo induttivo
Nei sensori induttivi variazioni di geometria causano variazioni del cammino medio seguito dalle linee
di campo e, di conseguenza, del coefficiente di auto o di mutua induzione, che possono essere rilevate
e trasformate in segnali di tensione mediante circuiti a ponte od oscillatori simili a quelli utilizzati per i
sensori capacitivi.
Considerando un generico circuito magnetico:
L‟induttanza è legata alla variazione del flusso indotto
e al numero di spire N dalla relazione:
La riluttanza R è funzione dei parametri geometrici e magnetici dei materiali utilizzati:
Sensori di posizione di tipo induttivo
I sensori induttivi a singolo avvolgimento sono composti da un avvolgimento fisso e da un nucleo
ferromagnetico con una parte mobile. Il sensore converte la grandezza da misurare in una variazione
dell‟induttanza.
Trascurando il flusso di dispersione si ha:
Essendo:
Questo tipo di sensore è poco usato a causa della non linearità della caratteristica.
Sensori di posizione di tipo induttivo
LVDT - RVDT
Un sensore induttivo a trasformatore è un sensore di tipo assoluto disponibile sia in versione rotativa
detta Rotary Variable Differential Transformer (RVDT) che lineare detta Linear Variable Differential
Transformer (LVDT).
Il trasformatore differenziale è un sensore passivo o “modulante”, in quanto richiede un generatore
ausiliario per generare una tensione sinusoidale di “eccitazione” per il funzionamento del sensore.
Sensori di posizione di tipo induttivo
Un LVDT consiste in un cursore di materiale ferromagnetico, un avvolgimento primario su cui viene
impressa una tensione sinusoidale Ve = Vm sin(ωt) e due avvolgimenti secondari su cui si accoppia il
circuito magnetico inducendo due tensioni sinusoidali V1 e V2 di pulsazione ω e ampiezza dipendente
dalla posizione x del cursore.
Sensori di posizione di tipo induttivo
Se si suppone trascurabile il coefficiente di accoppiamento in aria rispetto al coefficiente di
accoppiamento attraverso il nucleo ferromagnetico, la tensione indotta nella parte di avvolgimento non
affacciata al nucleo è trascurabile.
Siano N0 ed NS rispettivamente il numero di spire del primario e dei secondari, l0 e n la lunghezza ed il
numero di spire per unità di lunghezza dei secondari. Se il nucleo è in posizione simmetrica si ha:
Sensori di posizione di tipo induttivo
Spostando il cursore di x si ha:
da cui:
Quando il nucleo è centrato sui due avvolgimenti del secondario appare la stessa tensione, e quindi, a
causa dell‟orientamento antisimmetrico del circuito, la tensione di uscita Eo è nulla. Se il nucleo si
sposta uno dei due secondari prevale sull‟altro e quindi si registra una tensione di uscita
proporzionale allo spostamento.
Sensori di posizione di tipo induttivo
Sensori di posizione di tipo induttivo
Il segnale di uscita è teoricamente una tensione alternata caratterizzata da:
Una pulsazione pari a quella del segnale applicato al circuito primario (detto portante).
Una ampiezza dipendente dalla posizione dell‟equipaggio mobile.
Una fase concorde o in opposizione rispetto alla portante in funzione del segno dello
spostamento.
Sensori di posizione di tipo induttivo
In realtà:
Si ha un legame lineare tra spostamento ed ampiezza della tensione d‟uscita solo all‟interno di un
determinato range, detto di linearità.
In corrispondenza dello zero la tensione d‟uscita assume un valore non nullo a causa di
accoppiamenti capacitivi parassiti e dell‟eventuale ripple della tensione d‟alimentazione.
L‟accuratezza della misura dipende dalla stabilità del generatore di tensione che sostiene la
portante.
Sensori di posizione di tipo induttivo
Per ottenere il massimo range di linearità nella pratica i tre avvolgimenti sono disposti coassialmente
attorno al nucleo ferromagnetico mobile. Con tale configurazione si ottiene un range di linearità
(normalizzato) attorno a .8.
Sensori di posizione di tipo induttivo
La tensione di zero viene annullata riportando al secondario una opportuna corrente capacitiva in
opposizione di fase rispetto a quella causata dagli accoppiamenti parassiti.
Sensori di posizione di tipo induttivo
Per ridurre la sensitività alle variazioni della tensione di alimentazione si può adottare l‟approccio detto
“Ratiometric wiring”.
Ratiometric Wiring
In tal caso lo spostamento del cursore è ottenuto dalla relazione:
x
V
VB
M A
V A VB
Eventuali variazioni della tensione di alimentazione hanno i medesimi effetti sia sul numeratore, che
sul denominatore e quindi vengono automaticamente compensati.
Sensori di posizione di tipo induttivo
L‟elettronica di interfacciamento deve essere progettata con cura, infatti il segnale di uscita è
modulato in ampiezza, e quindi occorre un circuito che ricavi il valore di cresta di una sinusoide e che
ne rilevi la fase rispetto alla portante.
Un semplice circuito passivo che permette una tensione differenziale continua dai circuiti secondari di
un LVDT è il seguente .
Sensori di posizione di tipo induttivo
In commercio esistono circuiti integrati specificatamente progettati per interfacciare LVDT.
Tali
circuiti sono del tipo:
LVDT Conditioners che estraggono ampiezza e fase del segnale del trasformatore differenziale
effettuandone anche il filtraggio.
LVDT-to-Digital Converters che effettuano anche il campionamento e la conversione in formato
digitale.
Per incrementare la sensibilità di un LVDT è possibile incrementare la tensione di alimentazione
almeno fino a quando il nucleo ferromagnetico inizia a saturare.
Sensori di posizione di tipo induttivo
Utilizzo di LVDT e circuito integrato di condizionamento per realizzare un anello di controllo di
posizione con azione proporzionale.
Data la limitata ampiezza del campo di misura del trasduttore, tale applicazione è idonea laddove
l‟organo meccanico debba effettuare limitati spostamenti nell‟intorno di una posizione di riposo (ad
esempio, lo stelo di una valvola di regolazione del flusso di un fluido).
Sensori di posizione di tipo induttivo
In un RVDT il cursore è sostituito da un organo, realizzato con materiale ferromagnetico, in grado di
ruotare attorno ad un asse. Il range di linearità tipico comprende rotazioni attorno all‟asse tra -45° e
45°.
Sensori di posizione di tipo induttivo
Struttura alternativa di un RVDT
Sensori di posizione di tipo induttivo
Caratteristiche del trasformatore differenziale
Risoluzione: da 2 a 20 µm per sensori lineari; da 10-5 a 10-4 rad per sensori rotativi
Sensibilità: da 50 a 100 mV/mm. La sensibilità dipende dalla tensione di alimentazione.
Errore di linearità: da 0.1 a 0.5%
Ampiezza del campo di misura: da 1 a 10 cm per sensori lineari; ±45° per sensori rotativi. I
modelli a più elevata risoluzione hanno un campo di misura ridotto.
Frequenza della tensione di alimentazione: da 1 a 50 Khz
Il Trasformatore Differenziale trova il suo migliore utilizzo nelle applicazioni dove la risoluzione
e la linearità sono più importanti dell‟ampiezza del campo di misura.
E`un sensore robusto, affidabile e preciso.
Il costo è abbastanza elevato ed inoltre richiede una circuiteria aggiuntiva di alimentazione e
soprattutto di demodulazione abbastanza costosa.
Sensori di posizione di tipo induttivo
I Resolver sono sensori di posizione angolare largamente utilizzati nelle applicazioni industriali,
soprattutto per il controllo della posizione e della velocità dei motori elettrici.
Il principio di funzionamento del Resolver si basa sulla variazione dell‟accoppiamento (di tipo
trasformatorico) tra due sistemi di avvolgimenti elettrici ruotanti l‟uno rispetto all‟altro.
Sensori di posizione di tipo induttivo
Sul sistema Generatore viene impressa una tensione sinusoidale alternata che genera un flusso
magnetico che, accoppiandosi con il circuito del sistema Rivelatore, crea una tensione indotta
dipendente dalla tensione impressa sul primario e dalla posizione relativa θ dei due sistemi.
Sensori di posizione di tipo induttivo
Un Resolver, comprende un avvolgimento di rotore (circuito primario, portante o Generatore) e due
avvolgimenti di statore (circuiti secondari o Rivelatori) posizionati in modo da avere i loro assi di
simmetria sfasati di 90° elettrici.
Sensori di posizione di tipo induttivo
Si considerino le seguenti ipotesi semplificative:
1. L‟asse del sensore ruota a velocità costante
quindi:
2. I circuiti di rotore e di statore sono puramente induttivi.
Sotto tali ipotesi se la tensione di rotore è
Il flusso concatenato con gli avvolgimenti di statore vale:
La tensione indotta sui circuiti secondari:
, il flusso di eccitazione vale:
Sensori di posizione di tipo induttivo
Le tensioni presenti sui due avvolgimenti di statore contengono due termini:
Il primo corrisponde al termine utile, cioè quello che contiene l‟informazione sulla posizione.
il secondo costituisce l‟errore dinamico, in quanto la sua ampiezza è proporzionale alla velocità
di rotazione del circuito secondario.
Considerando solo i termini utili il sensore fornisce come segnale di uscita una coppia di tensioni:
Esse sono caratterizzate da:
pulsazione pari a quella del segnale applicato al circuito primario;
ampiezza dipendente dalla posizione del rotore ed in quadratura reciproca;
fase concorde rispetto alla tensione impressa sul primario.
Grazie alla presenza dei due circuiti di statore sfasati di 90°, il resolver fornisce la posizione assoluta
dell‟asse rotante all‟interno di un giro.
Sensori di posizione di tipo induttivo
Sensori di posizione di tipo induttivo
I termini di errore dinamico sono segnali sinusoidali sfasati in quadratura rispetto ai segnali utili, con
ampiezza inversamente proporzionale alla pulsazione della portante.
L‟errore dinamico può essere ridotto:
Adottando un‟elevata pulsazione per la tensione portante.
Utilizzando il segnale della portante per estrarre il valore di cresta dal segnale utile
(demodulazione a valore di cresta), in quanto l‟errore dinamico è nullo in corrispondenza del
valore di cresta.
Utilizzando il segnale della portante per estrarre il valore medio nel semiperiodo della portante
stessa (demodulazione a valor medio), poichè l‟errore dinamico ha valor medio nullo nel
semiperiodo.
Sensori di posizione di tipo induttivo
Nei sistemi di controllo digitale viene utilizzato un componente denominato Resolverto to Digital
Converter (RDC) che effettua sia l‟operazione di demodulazione che la conversione analogico/digitale
del segnale così estratto.
La conversione del segnale del Resolver in un segnale digitale oltre alla demodulazione richiede
anche l‟estrazione dell‟informazione dell‟angolo dai segnali degli avvolgimenti secondari.
Tale operazione può essere fatta in modo esplicito, qualora si possa utilizzare un dispositivo dotato di
microprocessore.
Sensori di posizione di tipo induttivo
E‟ possibile realizzare la conversione del segnale del resolver con un circuito integrato autonomo,
effettuando una estrazione implicita dell‟angolo, senza calcolare direttamente l‟arcotangente,
considerando che:
e che, inoltre, se la differenza tra θ e δ è piccola, si può considerare valida l‟approssimazione:
Pertanto si può pensare di “approssimare” l‟angolo reale θ con un valore δ, che venga “corretto” in
base al suo discostamento dal valore reale.
Sensori di posizione di tipo induttivo
In pratica, una volta effettuata la moltiplicazione incrociata di seni e coseni dell‟angolo reale e di
quello digitale, il risultato ( θ ) può essere adoperato per comandare un oscillatore comandato in
-
δ
tensione (VCO) per determinare un incremento o decremento del contatore,finchè i due angoli non
siano uguali.
L‟ingresso analogico del VCO fornisce inoltre una stima della velocità
Sensori di posizione di tipo induttivo
Caratteristiche del resolver
Errore di linearità: da 0.1 % a 0.5 %;
Ampiezza del campo di misura: l‟informazione è assoluta solo nell‟ambito del giro elettrico, può
comunque compiere infinite rotazioni;
Frequenza della tensione di alimentazione: da 500 Hz a 20Khz.
Il Resolver è un sensore di posizione molto affidabile, abbastanza preciso, non troppo costoso,
in grado di essere applicato su sistemi in rotazione continua.
Esso trova attualmente la sua massima applicazione come sensore di posizione del rotore negli
azionamenti ad alte prestazioni con motori AC.
La sua robustezza, la tecnologia elettromagnetica simile a quella realizzativa di un motore e la
relativa insensibilità agli sbalzi di temperatura lo rendono idoneo all‟integrazione all‟interno del
motore stesso, favorendo così la compattezza e la riduzione dei costi dell‟insieme.
L‟inconveniente principale nelle applicazioni digitali è la necessità di un circuito di
demodulazione e conversione digitale abbastanza complesso e costoso.
Sensori di posizione di tipo induttivo
Esistono realizzazioni con p coppie di espansioni polari in cui il sensore fornisce la posizione
assoluta all‟interno di un giro elettrico, a cui corrispondono 1/p giri meccanici. Tale soluzione
consente di ottenere una maggiore risoluzione del sensore.
Sensori di posizione di tipo induttivo
Esistono anche realizzazioni brushless (senza spazzole) in cui il primario è alimentato tramite un
trasformatore rotante.
Sensori di posizione induttivi
Un sincro ha sostanzialmente la struttura di un motore elettrico di tipo sincrono trifase con
avvolgimenti connessi a stella, tuttavia, l‟avvolgimento di rotore è alimentato in corrente alternata
piuttosto che in corrente continua. Alimentando l‟avvolgimento di rotore di un sincrotrasmettitore (CG)
con una tensione sinusoidale vengono indotte sui tre avvolgimenti di statore tre tensioni sinusoidali.
Le ampiezze delle tensioni indotte sono funzioni sinusoidali della posizione angolare del rotore.
Sensori di posizione induttivi
Un sincroricevitore (CR) ha la stessa struttura di un CG. Connettendo back to back due sincro (CG –
sincrotrasmettitore – CR sincroricevtore) si ottiene un sistema per la trasmissione a distanza
dell‟informazione della posizione angolare.
Infatti, alimentando gli avvolgimenti di rotore di CG e CR con la stessa tensione e gli avvolgimenti di
statore del CR con le tensioni generate dal CG, il rotore del CR tende ad assumere la stessa posizione
del rotore del CG.
Sensori di posizione induttivi
In un sincrotrasformatore (CT) il rotore è bloccato, mentre l‟avvolgimento di rotore non è alimentato.
Connettendo un sicrotrasmettitore (CG) ad un sincrotrasformatore (CT) è possibile ottenere una
tensione
alternata
la
cui
ampiezza
è
proporzionale
alla
posizione
angolare
dell‟asse
del
sincrotrasmettitore.
Se poi l‟asse del CT non è bloccato, ma connesso all‟asse di un carico meccanico, la tensione indotta
sull‟avvolgimento di rotore del CT è una tensione alternata la cui ampiezza è funzione della differenza tra
la posizione angolare dell‟asse del CG e la posizione angolare del carico.
Sensori di posizione induttivi
Sistema di controllo della posizione
Sensori di posizione elettroottici
L‟encoder è un sensore di posizione passivo che fornisce un‟uscita digitale codificata (è possibile
peraltro ottenere anche una misura di velocità).
L‟encoder è disponibile sia in versione per l‟acquisizione di posizioni angolari che per l‟acquisizione
di spostamenti lineari (denominato in questo caso Inductosyn o Riga Ottica, in relazione al principio di
funzionamento utilizzato).
L‟encoder può essere di due tipi:
Encoder Assoluto.
Encoder Incrementale.
Sensori di posizione elettroottici
L‟encoder elettroottico per l‟acquisizione di posizioni angolari è costituito da un disco di materiale
trasparente su cui sono depositate strisce radiali di materiale opaco, da una sorgente luminosa e da
un certo numero di dispositivi fotosensibili.
Sensori di posizione elettroottici
In un encoder assoluto le strisce opache sono disposte su corone circolari, ad ogni corona circolare
corrisponde un bit di risoluzione del dispositivo. Ad ogni posizione del disco corrisponde una
configurazione binaria
La posizione viene acquisita mediante una batteria di sensori fotovoltaici pari al numero di bit di
risoluzione dell‟encoder. Tali sensori sono posti in corrispondenza di un uguale numero di sorgenti
luminose, da cui sono separati dal disco dell‟encoder.
Sensori di posizione elettroottici
Il problema principale degli encoder assoluti è rappresentato dalla possibile ambiguità della lettura
della posizione a causa di transizioni spurie tra due settori, durante le quali alcune variazioni di bit
vengono rilevate prima di altre.
In particolare utilizzando la codifica binaria pura, passando da 101 a 110 potrebbe essere rilevato
prima il dato 111 e solo dopo una certa quantità di tempo il dato corretto.
L‟ambiguità di lettura è legata al fatto che con la codifica binaria pura possono variare più cifre nel
passaggio da un settore al seguente
Sensori di posizione elettroottici
L‟ambiguità della lettura della posizione può essere risolta dotando il disco di una pista aggiuntiva
che permette di interdire la lettura della posizione durante il passaggio da un settore all‟altro.
Sensori di posizione elettroottici
La soluzione maggiormente utilizzata per questo problema è però l‟adozione della codifica Gray, o
binaria riflessa. Tale codifica è caratterizzata dal fatto che due configurazioni contigue differiscono
solamente per un bit (codifica progressiva). E‟ detta anche codifica binaria riflessa perche si osserva
una simmetria per i primi n-1 bit con asse di simmetria la separazione tra il numero 2n-1-1 e 2n-1.
La codifica Gray è una codifica binaria non ponderata perché qualsiasi bit preso singolarmente non
ha significato e solo l‟intera stringa identifica la posizione.
Sensori di posizione elettroottici
I valori codificati secondo il codice Gray, non possono essere utilizzati direttamente in elaborazioni
matematiche, ma devono essere preventivamente convertiti in codice binario.
Per convertire una stringa in codifica Gray nella corrispondente stringa nella codifica binaria pura si deve
eseguire la somma del dato con la stessa stringa spostata di un passo a destra trascurando i riporti ed il
bit meno significativo.
La conversione può essere eseguita con un‟opportuna rete combinatoria.
Sensori di posizione elettroottici
Nei sistemi a microprocessore spesso si utilizza una tabella di corrispondenza precalcolata e
memorizzata (look up table).
Sensori di posizione elettroottici
La risoluzione di un encoder assoluto dipende dal numero di piste, cioè dal numero di bit della
codifica.
Sensori di posizione elettroottici
La risoluzione di un encoder assoluto dipende dalle sue dimensioni fisiche, ma per limitazioni delle
lavorazioni meccaniche il disco non può superare un diametro di 15 cm corrispondenti a una codifica
di circa 20 bit. Se è necessaria una maggiore risoluzione è possibile utilizzare un encoder con due
dischi connessi mediante un riduttore con rapporto di trasmissione 1 : 2n ove n è il numero di piste
del disco più veloce.
Sensori di posizione elettroottici
In un encoder incrementale le strisce trasparenti si trovano su di una sola corona circolare, alternate
a strisce opache. La distanza tra due strisce trasparenti si chiama passo dell‟encoder.
Il sistema di rivelazione del segnale dell‟encoder incrementale è costituito da una sorgente luminosa
e tre sensori fotovoltaici, uno per rilevare la tacca di zero e due per determinare il verso di rotazione
dell‟encoder.
Sensori di posizione elettroottici
Un encoder incrementale necessita di un circuito di conteggio che identifichi il numero di transizioni
avvenute durante il movimento a partire da un certo stato iniziale, identificato dalla tacca di zero . Il
rilevamento di questa tacca consente di inizializzare il conteggio.
I due sensori fotovoltaici (A e B) di rilevazione del verso sono sfasati di 1/4 di passo tra di loro. In
modo da poter rilevare il verso di rotazione.
Il senso orario è codificato dalla sequenza “0-0”, “1-0” e “1-1”
Il senso antiorario è codificato dalla sequenza “0-0”, “0-1” e “1-1”.
Sensori di posizione elettroottici
I segnali d‟uscita sono convertiti in valori numerici corrispondenti alla posizione mediante dispositivi
Encoder Interface che operano, il filtraggio digitale del segnale, la conversione degli impulsi ad onda
quadra in impulsi one-shot, determinando anche il verso di rotazione.
Sensori di posizione elettroottici
Per aumentare la risoluzione del sensore è possibile moltiplicare per 2 (contando i fronti di salita di
entrambe le tracce) e per 4 (contando sia i fronti di salita che i fronti di discesa) gli impulsi per passo
dell‟encoder.
Sensori di posizione elettroottici
Maggiori risoluzioni si ottengono con gli encoder Sin/Cos, nei quali i segnali di uscita A e B hanno
andamento (quasi) sinusoidale anzichè ad onda quadra.
Con tali dispositivi è possibile avere una informazione continua ed assoluta della posizione all‟interno
di un passo dell‟encoder.
Sensori di posizione elettroottici
All‟interno di un passo dell‟encoder è possibile determinare la posizione assoluta dell‟asse
dell‟encoder con un metodo simile a quello utilizzato nei resolver.
Il segnale acquisito da un encoder Sin/Cos non è però paragonabile a quello fornito da un resolver.
Infatti il periodo della sinusoide del segnale generato da un encoder Sin/Cos è pari ad un passo della
corona circolare, mentre nel resolver tale periodo è l‟angolo giro completo.
Sensori di posizione elettroottici
Si possono contare gli impulsi incrementali dell‟encoder con una rete sequenziale che implementi una
macchina a stati finiti, realizzata mediante un microprocessore oppure circuiti logici integrati
programmabili (PLD, Programmable Logic Devices o FPGA, Field Programmable Gate Array).
Sensori di posizione elettroottici
Per misurare spostamenti lineari è possibile utilizzare sia encoder rotativi con particolari
accoppiamenti meccanici che encoder lineari.
Sensori di posizione elettroottici
Corretta interpretazione del valore di conteggio
Se il contatore utilizzato ha una risoluzione differente da quella dell‟encoder, occorre prestare
attenzione al “roll-over” del contatore, cioè al momento in cui il contatore raggiunge il massimo
valore rappresentabile e si azzera. Possono presentarsi due situazioni:
Il valore di roll-over vale 2M e i passi per giro dell‟encoder sono 2N (M>N): è sufficiente
mascherare gli M - N bit più significativi del valore di conteggio, espresso in codice binario.
Uno dei due range non è una potenza di due, occorre introdurre nel software di controllo,
una routine per tenere traccia della posizione raggiunta all‟interno del giro encoder e della
“posizione virtuale” del giro encoder all‟interno del range di conteggio.
In presenza di riduttori di velocità occorre inoltre valutare la proporzione tra un ciclo della parte
operativa controllata ed il numero di rivoluzioni dell‟encoder.
Sensori di posizione elettroottici
Caratteristiche funzionali
Risoluzione: La massima risoluzione è dell‟ordine del centesimo di millimetro ed è limitata
da prolemi meccanici e di forma d‟onda del segnale generato.
r
360
2
n
(encoder rotativo)
r
l0
2n
(encoder lineare)
Sensori di posizione magnetici
Un encoder incrementale magnetico è composto da un tamburo (o un disco) magnetizzato e da un
dispositivo magnetoresistivo.
La superfice esterna del tamburo magnetizzato, presenta delle scanalature, o cave, che causano una
variazione periodica del flusso di induzione magnetica che investe il dispositivo magnetoresistivo al
ruotare dell‟asse.
Lo stesso effetto può essere ottenuto sagomando opportunamente la superfice frontale di un disco
magnetizzato.
Sensori di posizione magnetici
Il principio di funzionamento dell‟encoder magnetico si basa sulle proprietà dei materiali
magnetoresistivi, la cui la resistenza viene modificata dall‟applicazione di un campo magnetico.
Per ottenere i due segnali in quadratura ed il segnale di zero si utilizzano due tamburi coassiali e tre
dispositivi magnetoresistivi.
Sensori di posizione magnetici
L‟utilizzo di un encoder magnetico al posto di un encoder ottico è preferibile:
In ambienti in cui la polvere, l‟umidità o la condensa possono pregiudicare il corretto
funzionamento dei dispositivi elettroottici.
In applicazioni in cui il sensore è sottoposto a forti vibrazioni o scosse.
Sensori di posizione ad effetto Hall
In alcune applicazioni ove, come ad esempio la misura della posizione del rotore di motori DC brushless
necessaria per stabilire l‟ordine di alimentazione delle fasi, è richiesta una risoluzione poco elevata (30°
- 90°), si utilizzano encoder assoluti con sensori ad effetto HALL.
Un encoder ad effetto Hall è costituito da un magnete posto sulla parte mobile (rotante) dell‟encoder e di
due sensori ad effetto Hall sfasati di 90° posti sullo statore. E‟ necessario utilizzare due sensori ad
effetto Hall per poter discriminare il verso di rotazione.
Aumentando il numero di coppie di poli magnetici aumenta la risoluzione del sensore.
Sensori di posizione ad effetto Hall
Quando un campo magnetico H viene applicato perpendicolarmente ad una superficie conduttrice
percorsa da corrente, si genera un campo elettrico perpendicolare sia al verso di scorrimento della
corrente che alla direzione del campo magnetico(effetto Hall).
La differenza di potenziale così generata dipende dall‟intensità e dalla direzione del campo magnetico e
della corrente:
dove
e
rappresentano i vettori del campo magnetico e della corrente, mentre φ è l‟angolo
tra i loro versori, e K è una costante che dipende dalla geometria del sensore.
Sensori di velocità
I sensori induttivi di velocità sono sensori di tipo analogico che sfruttano la legge di Faraday Lenz
per generare una tensione alternata a frequenza proporzionale alla velocità di rotazione .
I sensori di velocità angolare induttivi sono composti da una ruota dentata (ruota fonica) da un
avvolgimento e da un magnete permanente.
Sensori di velocità
Il susseguirsi di denti e cave della ruota dentata davanti all‟avvolgimento determina una periodica
variazione della riluttanza del circuito magnetico che crea una variazione ciclica del flusso che
induce una tensione alternata sull‟avvolgimento.
Sensori di velocità
Per la legge di Faraday Lenz si ha:
v( t )
d
dt
La velocità può essere ottenuta contando il numero di impulsi generati in un dato intervallo di tempo
per mezzo di un contatore digitale, resettato periodicamente da un opportuno segnale di trigger.
Sensori di velocià
La frequenza della tensione generata è proporzionale alla velocità angolare della ruota mentre
ampiezza e forma dipendono dalle caratteristiche geometriche del sensore.
Sensori di velocità
La dinamo tachimetrica è un sensore passivo di tipo analogico che fornisce una tensione di uscita
proporzionale alla velocità di rotazione.
Sensori di velocità
La dinamo tachimetrica è una macchina elettrica in corrente continua costituita da uno statore a
magneti permanenti e da un rotore (indotto) equipaggiato con un collettore a lamelle.
Indicando con
mp
il flusso di eccitazione generato dai magneti permanenti e con
rotazione, la tensione presente alle spazzole vale:
V
K
mp
Ove K è una costante che dipende dalle caratteristiche costruttive della dinamo.
la velocità di
Sensori di velocità
la parte mobile del sensore è costituita da un avvolgimento solidale alla parte di cui occorre misurare
la velocità. L‟avvolgimento è immerso in un campo magnetico fisso generato da un magnete
permanente.
Sensori di velocità
Considerando una singola spira in rotazione, ai terminali della spira viene generata una tensione
variabile sinusoidalmente nel tempo.
e
Blv m1
Blv m2
2 Blv m1
2 BlR sin( t )
BA sin( t )
essendo
[ vm1
vm2 ]
A 2R l
Nel caso di un avvolgimento con N spire in serie si ha:
V K sin( t )
e
t
sin( t )
Sensori di velocità
1 coppia polare
e
N
S
t
2 coppie polari
S
e
w
N
N
S
t
Sensori di velocità
Collettore a lamelle
V XY
V XY
V
V AD
V AD
per 0
per
XY
E
t
V
=e
AD
t
t
2
Sensori di velocità
La tensione alle spazzole non è perfettamente continua anche se il rotore ruota a velocità costante per
la presenza del collettore a lamelle.
Si osserva in particolare una componente alternata ad una
pulsazione multipla della velocità angolare del rotore.
EMAX
E
E min
t
La componente alternata può raggiungere ampiezze pari al 10% del segnale utile. Il filtraggio di tale
componente costituisce uno dei maggiori problemi delle dinamo tachimetriche perché a frequenza
variabile da zero a qualche centinaio di Hertz.
La corrente prelevata dall‟indotto deve essere minima per ritenere trascurabili i fenomeni di reazione
d‟indotto e le cadute di tensione resistive sull‟avvolgimento.
Le dinamo tachimetriche raggiungono precisioni dell‟1%.
Sensori di velocità
La dinamo tachimetrica è un sensore di basso costo, fornisce una informazione assoluta e non
necessita di una tensione di alimentazione.
Di contro la presenza di spazzole striscianti sul circuito elettrico, necessarie per prelevare il segnale,
ne riduce l‟affidabilità ed allo stesso tempo peggiora la qualità del segnale di uscita, caratterizzato da
oscillazioni generate durante il passaggio delle spazzole sulle zone isolate del collettore.
Il sensore ha inoltre una scarsa risoluzione alle basse velocità.
Sensori di velocità
In alternativa alla dinamo tachimetrica è possibile utilizzare un alternatore, cioè un generatore di tensione
alternata,.
Un alternatore è una macchina elettrica in corrente alternata di tipo sincrono costituita da uno statore in
cui sono alloggiati uno o più avvolgimenti e da un rotore a magneti permanenti.
Il vantaggio principale dell‟alternatore rispetto alla dinamo è quello di non possedere il collettore a
lamelle.
Sensori di velocità
Indicando con
mp
il flusso di eccitazione generato dai magneti permanenti e con
la velocità di
rotazione, la tensione indotta sugli avvolgimenti di un alternatore monofase statore vale:
V
K
mp
sin (h t)
Ove K e h sono due costanti che dipendono dalle caratteristiche costruttive dell‟alternatore.
e
t
Sia
l‟ampiezza
che
la
frequenza
della
tensione
ottenuta
sono
correlate
alla
velocità.
Sensori di velocità
Una prima tecnica per ottenere l‟informazione della velocità è quella di utilizzare un convertitore f/v per
generare una tensione proporzionale alla velocità, sfortunatamente la realizzazione di un circuito f/v PLL
con frequenza d‟ingresso variabile in un range esteso è problematica e costosa.
Una tecnica alternativa è quella di utilizzare un raddrizzatore con condensatore di filtro per ottenere una
tensione d‟uscita pseudo continua, il cui valor medio è proporzionale alla velocità angolare del rotore.
La resistenza è necessaria per permettere la scarica del condensatore. Maggiore è il valore di R più
fedelmente il sensore segue la velocità in caso di decelerazione, ma al contempo maggiore è l‟ondulazione
residua. L‟ondulazione residua della tensione generata può essere minimizzata aumentando il valore della
capacità di filtro, ma questo limita la dinamica del sensore. In alternativa è possibile aumentare il numero
delle fasi dell‟alternatore.
Sensori di velocità
Risultati migliori possono essere ottenuti con un alternatore trifase con forma d‟onda della forza
elettromotrice indotta trapezoidale. In questo caso l‟ondulazione della tensione d‟uscita del raddrizzatore
trifase è teoricamente nulla e non è necessario il filtro.
Sensori di velocità
Misura della velocità da sensori di posizione
Quando un sensore di posizione è già esistente nel sistema, piuttosto che introdurre un ulteriore
sensore di velocità si preferisce utilizzare l‟informazione sulla posizione per calcolare la velocità.
Questa soluzione è in particolare adottata quando si utilizzano encoder incrementali o resolver.
Sensori di velocità
Un segnale analogico di velocità può essere ottenuto inviando il segnale d‟uscita dell‟encoder ad un
convertitore f/V (frequenza / tensione) ad esempio di tipo PLL.
Il convertitore f/V genera una tensione continua proporzionale alla frequenza del segnale d‟ingresso.
Questa soluzione può presentare fenomeni di instabilità alle basse velocità
Sensori di velocità
La velocità può essere ottenuta da un encoder incrementale anche contando il numero di impulsi
generati in un dato intervallo di tempo. Tale misura è tuttavia affetta da rumore che aumenta con il
diminuire della velocità dell‟encoder in quanto il numero di impulsi che vengono misurati per unità di
tempo diminuisce fino ad un limite oltre il quale si ha una misura nulla anche se il sensore in realtà si
muove.
La velocità limite è tanto più bassa quanto più è ampia la base dei tempi e corto il passo dell‟encoder.
All‟aumentare della base dei tempi aumenta però il tempo di campionamento.
Alle basse velocità può essere utilizzato un contatore con clock elevato triggerato dai fronti di salita
del segnale dell‟encoder. In tal caso viene determinato l‟intervallo di tempo compreso tra i due fronti
di salita con una risoluzione che aumenta al diminuire della velocità.
D‟altra parte il tempo di
campionamento si allunga proporzionalmente e può divenire troppo elevato per la specifica
applicazione.
Sensori di velocità
La velocità può anche essere calcolata derivando numericamente la misura di posizione.
α t 1 α t0
t 1 t0
La derivata numerica viene solitamente effettuata dal microprocessore del controllore di processo,
quindi esternamente al sistema di misura. Tale operazione è però molto delicata ed amplifica ogni
forma di rumore. La quantizzazione della misura di posizione, in particolare, può causare notevoli
errori nel calcolo della velocità, soprattutto alle basse velocità.
Per migliorare il risultato è necessario filtrare o mediare il risultato dell‟operazione di derivazione ma
ciò peggiora la dinamica della misura.
Sensori di velocità
Un‟alternativa alla derivata numerica è l‟utilizzo di un osservatore di stato ad anello chiuso.
La derivata della posizione angolare viene confrontata con l‟uscita di un modello matematico del
sistema meccanico. L‟errore e l‟integrale dell‟errore vengono elaborati da una rete correttiva (rete PI)
ed il risultato viene utilizzato come ingresso del modello matematico.
Un‟eventuale stima della coppia permette di ottenere una risposta più veloce e stabile.
Sensori di velocità
Nel caso dei resolver un segnale analogico proporzionale alla
velocità può essere ottenuto
prelevando il segnale d‟ingresso del VCO del circuito di demodulazione. I risultati ottenuti sono
paragonabili a quelli che si hanno impiegando un encoder e un convertitore v/f.
Sensori di accelerazione
Un accelerometro è costituito da una massa sismica che si muove all‟interno di un contenitore
solidale al corpo di riferimento. La massa sismica è connessa ad una molla di coefficiente elastico K e
ad uno smorzatore con coeficiente di attrito viscoso b.
Sensori di accelerazione
Un accelerometro è un sistema di secondo grado è cioè descritto da un‟equazione differenziale del
secondo ordine.
L‟equilibrio tra le forze applicate alla massa sismica risulta essere:
ove
è la posizione assoluta della massa sismica. Si ha quindi:
Una volta raggiunta una situazione di equilibrio, tale cioè che la velocità relativa della massa sismica
rispetto al corpo sia nulla si ha:
conseguentemente:
Sensori di accelerazione
L‟accelerazione può essere determinata per misura diretta della forza elastica
.
Accelerometro con estensimetro
Un estensimetro è un sensore che rileva deformazioni meccaniche trasformandole in variazioni di
resistenza.
Sensori di accelerazione
Accelerometro a sensore piezoelettrico
Un sensore piezoelettrico trasforma variazioni della geometria del sensore in variazioni della quantità
di carica accumulata sulla superfice esterna. I materiali piezoelettrici tendono ad accumulare cariche
elettriche sulla superficie quando sono sottoposti ad una forza F, secondo la relazione:
nella quale σ è la densità di carica superficiale e H viene detta costante piezoelettrica. Le superfici del
materiale piezoelettrico si comportano quindi come le armature di un condensatore.
Sensori di accelerazione
L‟accelerazione può essere determinata anche dalla misura dello scostamento x tramite un sensore di
posizione lineare come un potenziometro, un LVDT o un encoder lineare
Sensori di accelerazione
Accelerometro a LVDT
Sensori di accelerazione
Accelerometri a semiconduttore
Gli accelerometri a semiconduttore sono realizzati sfruttando le capacità di miniaturizzazione del
silicio, che permette di realizzare una massa sismica connessa tramite barre di sospensione (che
agiscono come molle) ad un supporto dello stesso materiale.
La misura della forza elastica può essere effettuata integrando nelle barre di sospensione:
dei resistori estensimetrici, connessi a ponte di Wheatstone
dei cristalli piezoelettrici, connessi ad amplificatori di carica.
Sensori di accelerazione
L‟accelerometro viene utilizzato anche per effettuare misure vibrazionali su componenti meccanici.
Occorre notare che il sistema massa/molla/smorzatore nel contenitore dell‟accelerometro
è un
sistema del secondo ordine, che ha una frequenza di risonanza:
Diventa quindi molto importante evitare di imprimere al dispositivo vibrazioni a frequenze vicine a
quella di risonanza, per evitare picchi nella risposta.
Estensimetro
La misura di una forza incidente su di un oggetto può essere ottenuta misurando la deformazione o la
variazione di geometria che l‟oggetto in questione subisce.
L‟estensimetro, detto strain gauge, è un sensore che rileva deformazioni meccaniche trasformandole
in variazioni di resistenza.
Esso è costituito da un elemento sensibile (di materiale metallico o semiconduttore), la cui resistenza
varia a seguito di deformazioni, a causa di variazioni della geometria.
Estensimetro
Gli estensimetri metallici sono ricavati su di un supporto isolante su cui viene depositata una traccia
di lega metallica (tipicamente nichel, nichel-cromo, manganina, costantana, platino) avente una forma
a zig-zag per aumentare la deformazione complessiva.
La dimensione tipica di un estensimetro metallico è di circa 1 cm quadrato.
Gli estensimetri a semiconduttore sono invece costituiti di silicio opportunamente drogato.
La sensibilità di questi sensori è molto più elevata rispetto agli estensimetri metallici e quindi
forniscono un segnale molto più forte a parità di superficie utile. Per questo motivo gli estensimetri a
semiconduttore sono estremamente piccoli (valori tipici sono dell‟ordine di 0.5 mm quadrati).
Di contro sono molto sensibili alla variazione di temperatura ambientale e sono di difficile
manipolazione a causa della loro piccola dimensione.
Estensimetro
Quando una forza agisce su di una struttura meccanica in regime di elasticità questa si deforma di una
quantità approssimativamente proporzionale alla forza incidente secondo la legge di Hooke:
σ
è la forza normale riferita all‟unità di superficie
E
è una costante di proporzionalità, detta modulo di Young
l/l è la deformazione relativa.
Estensimetro
Considerando un corpo cilindrico di lunghezza l e sezione S sottoposto ad una forza F longitudinale
risulta:
L‟allungamento (o accorciamento) è quindi:
Il termine C = SE/l viene chiamato costante elastica del materiale, dipende
da caratteristiche
geometriche (S e l) e fisiche (E) del corpo.
Oltre all‟allungamento il materiale subisce una diminuzione della sezione pari a:
Il parametro µ viene anche detto modulo di Poisson e vale circa 0.3 per quasi tutti i metalli.
Estensimetro
La resistenza di un estensimetro a sezione costante S e di lunghezza l è espressa da:
essendo ρ la resistività del materiale.
Il differenziale della resistenza vale:
Trascurando il primo termine, che indica variazioni di resistività indipendenti dalle variazioni della
geometria, e sostituendo si ottiene:
Estensimetro
Il parametro K= (1+2 ) è detto costante di taratura o gauge factor
e misura la sensibilità
dell‟estensimetro.
Valori tipici di gauge factor per diversi tipi di estensimetri
Materiale
gauge factor
Metalli conduttori
≈2
Manganese
0.5
Nichel
12
Materiali semiconduttori
> 100
E‟ possibile calcolare l‟entità della forza che imprime la deformazione, infatti (confondendo
differenziale d e la variazione ):
il
Acquisizione del segnale estensimetrico
L‟acquisizione del segnale generato dall‟estensimetro non è semplice, in quanto la sua entità,
soprattutto per estensimetri metallici, è molto modesta.
Nella quasi totalità dei casi si utilizza una con.gurazione a ponte di Wheatstone con le resistenze di
riferimento 1,2,3 tutte di egual valore R e la resistenza di misura (estensimetro) Rg.
Acquisizione del segnale estensimetrico
L‟equazione del circuito vale:
Se la resistenza di misura Rg a riposo ha una resistenza pari a R, allora in assenza di deformazione il
ponte è perfettamente bilanciato e quindi
Acquisizione del segnale estensimetrico
Quando si applica una forza deformante, la resistenza dell‟estensimetro si modifica di R, e quindi la
tensione di uscita dal ponte diventa:
Poiché R = 100÷3000
e
R = .1÷ .001, si ha che
caratteristica del sensore ad una caratteristica lineare:
R/R << 1. E‟ quindi possibile approssimare la
Acquisizione del segnale estensimetrico
Poiché R >> R ed inoltre Val è al più di qualche decina di volt la tensione fornita dal ponte di
Wheatstone è molto piccola e deve essere opportunamente amplificata, mediante un amplificatore
retroazionato.
Acquisizione del segnale estensimetrico
Per migliorare la precisione della misura usano estensimetri non deformati come resistenze di
riferimento del ponte, meglio se provenienti dallo stesso lotto di fabbricazione.
E‟ possibile aumentare la sensibilità della misura, piazzando gli estensimetri, in modo che siano
deformati simmetricamente a coppie.
Acquisizione del segnale estensimetrico
La misura di variazione di resistenza nel caso di due estensimetri sollecitati vale:
Il caso ottimale si ha utilizzando quattro estensimetri. In tal caso l‟uscita del sensore vale:
Cella di carico
La cella di carico (load cell) è un sensore per la misura della forza, che trasforma in variazioni di
tensione variazioni geometriche di un elemento elastico.
Cella di carico con LVDT
La forza applicata alla piattaforma comprime la molla e sposta l‟equipaggio mobile del LVDT, che
fornisce un‟uscita proporzionale allo spostamento e quindi alla forza. Essendo infatti K la costante
elastica della molla, x lo spostamento della piattaforma, risulta:
Cella di carico con estensimetri
La cella di carico comprende quattro estensimetri posti lungo l‟anello della cella. La forza F provoca
un allungamento degli estensimetri R2 e R4 ed una compressione degli estensimetri R1 e R3.
Questa configurazione del ponte è tale da dare la massima variazione di tensione a seguito
dell‟applicazione del carico, mentre lo sbilanciamento dovuto alla variazione di temperatura
minimo.
è
Cella di carico piezoelettrica
Applicando una forza F sulla superficie di un cristallo piezoelettrico si genera un accumulo di carica
proporzionale alla forza stessa, secondo la relazione:
nella quale σ è la densità di carica superficiale e K viene detta costante piezoelettrica.
Cella di carico piezoelettrica
Le superfici del materiale piezoelettrico si comportano come le facce di un condensatore. Si potrebbe
quindi pensare di rilevare la tensione ai capi del sensore e determinare da questa la quantità di carica:
La capacità del cristallo varia però a sua volta in relazione alla forza applicata, quindi non è nota a
priori.
Occorre pertanto “trasferire” la carica su di una capacità nota e stabile, utilizzando un amplificatore di
carica.
Cella di carico piezoelettrica
L‟amplificatore di carica è un circuito integratore che opera l‟integrazione della corrente generata dalla
cella piezoelettrica quando si chiude l‟interruttore s.
Cella di carico piezoelettrica
La sensibilità del sensore vale:
L‟amplificatore di carica, sebbene semplice dal punto di vista concettuale, risulta molto delicato e
costoso dal punto di vista costruttivo poiché la quantità di carica indotta molto piccola.
Cella di carico piezoelettrica
Le celle di carico piezoelettriche possiedono una elevata velocità di risposta, tuttavia, a causa della
corrente di dispersione la tensione fornita dall‟amplificatore di carica non rimane costante ma tende a
diminuire. Ciò rende adatte le celle di carico a misure di vibrazioni mentre le rende inadatte a misure di
forza in regime stazionario.
Applicazioni delle celle di carico
Misura di flusso di materiali solidi
Misura di quantità di liquidi
Sensori di pressione
I sensori di pressione convertono la forza esercitata sulla superfice in uno spostamento, che viene
trasformato a sua volta in un segnale elettrico da un sensore di posizione.
Sensori di pressione con tubo di Bourdon
I sensori di pressione possono essere realizzati sfruttando il principio del tubo di Bourdon. In un tubo
chiuso ad una estremità ed avvolto a spirale si ottiene una deformazione geometrica, proporzionale alla
differenza tra la pressione del fluido interno e la pressione esterna.
La deformazione del tubo di Bourdon è uno spostamento lineare proporzionale alla differenza tra la
pressione interna del tubo e la pressione esterna.
Sensori di pressione con tubo di Bourdon
La deformazione causata da una variazione di pressione su un tubo di Bourdon può essere misurata
tramite un sensore di scostamento lineare (es. LVDT).
Sensori di pressione a membrana
Altri sensori di pressione sfruttano la deformazione di una membrana.
In questo caso si sfruttano sensori estensimetrici o di tipo piezoelettrico per determinare le
deformazioni della membrana riconducibili alla differenza di pressione tra i due lati della membrana
stessa.
Sensori di pressione capacitivi
Nei sensori di pressione di tipo capacitivo la membrana costituisce una delle armature di un
condensatore. Uno sbilanciamento di pressione crea uno sbilanciamento di capacità che può essere
rivelato mediante un ponte capacitivo.
Sensori di portata di fluido
I sensori di portata misurano la portata volumica Qv, cioè il volume di liquido che attraversa una
sezione di condotto per unità di tempo.
Essendo A l‟area della sezione del condotto e c la velocità del fluido.
Sensori di portata a effetto Bernoulli
I sensori di portata a effetto Bernoulli convertono la portata in una differenza di pressione, che può
essere trasformata in un segnale elettrico da un sensore di pressione. Per il teorema di Bernoulli:
essendo p la pressione
la densità, g l‟accelerazione di gravità e h la quota.
Considerando un liquido incomprimibile che scorre lungo un condotto circolare con una strozzatura si
può scrivere per le due sezioni di diametro D1 e D2:
Sensori di portata a effetto Bernoulli
Si ha quindi:
Per un condotto di sezione circolare si ha:
da cui:
ed infine:
Misurando la differenza di pressione tra le sezioni 1 e 2 si ricava la velocità del fluido attraverso la
sezione 2 e da questa la portata volumica:
Sensori di portata a turbina e a mulinello
In tali sensori la portata viene misurata sfruttando il fatto che la velocità di rotazione della girante è
proporzionale alla velocità del fluido.
= Kc
Sensori di temperatura
La variazione di temperatura è tra le principali cause di cambiamento delle caratteristiche fisiche dei
materiali, pertanto, si possono realizzare elementi sensibili alle variazioni di temperatura che sfruttano
diversi principi fisici.
Sensore
Principio fisico
Termocoppia
effetto Seebeck
Termoresistenza
effetto termoresistivo
Termistori
effetto termoresistivo
Sensori Integrati
effetto termoresistivo
Pirometro
trasmissione del calore per radiazione
Termocoppie
Il principio di funzionamento della termocoppia si basa sull‟Effetto Seebeck. Quando una giunzione
tra due metalli viene riscaldata si produce ai terminali liberi una differenza di potenziale che, per
piccole differenze di temperatura è approssimativamente lineare.
In base ai metalli usati nella giunzione, le termocoppie vengono classificate secondo lo standard ANSI
con lettere maiuscole.
La massima tensione di uscita Vmax è misurata considerando la giunzione di riferimento a 0 C°.
La termocoppia non necessita di una alimentazione esterna, in quanto l‟effetto Seebeck genera
direttamente una tensione di uscita.
Per escursioni di temperatura rilevanti la caratteristica temperatura-tensione della termocoppia non è
lineare e quindi deve essere linearizzata mediante opportuni algoritmi.
Termocoppie
Il segnale di uscita deve essere elaborato per estrarre la temperatura reale della giunzione calda, in
quanto la relazione temperatura–tensione è non lineare, e i conduttori che collegano la termocoppia al
circuito di acquisizione creano una giunzione parassita.
Nel circuito sono presenti 3 giunzioni: Rame-Ferro, Ferro-Constantana e Constantana-Rame.
La tensione di uscita dipende dalle tensioni di tutte tre le giunzioni:
Termocoppie
La compensazione delle tensioni delle giunzioni parassite viene effettuata tenendo conto che due
termocoppie in serie che condividono lo stesso materiale centrale e sono alla stessa temperatura,
generano la tensione che genererebbe una sola termocoppia realizzata con i due materiali esterni.
Si sostituisce pertanto nel circuito la giunzione Rame-Constantana con una doppia giunzione fittizia
Rame-Ferro / Ferro-Costantana.
La tensione di misura vale:
Termocoppie
Se le due giunzioni Rame-Ferro si trovano alla stessa temperatura, allora le due tensioni V2 e V3 si
bilanciano e quindi si possono eliminare dalla misura di Vm.
La tensione misurata è quindi uguale alla somma tra la tensione di giunzione alla temperatura del
forno V1 e la tensione della stessa giunzione alla temperatura di riferimento Tref .
Misurando la temperatura di riferimento (solitamente la temperatura ambiente) la tensione della
giunzione a Tref può essere calcolata dalla caratteristica tensione/temperatura della termocoppia.
Termocoppie
Procedimento di misura
Misura della temperatura di riferimento (tramite un termistore)
Calcolo della equivalente tensione di termocoppia V (Tref ) usando la caratteristica della
termocoppia di misura.
Alla tensione Vm acquisita dalla termocoppia si sottrae la tensione così calcolata ottenendo la
tensione della giunzione di misura V (T1).
Termocoppie
In alternativa è possibile usare un ponte compensato che genera la tensione di correzione.
Termoresistenze
Le termoresistenze, altrimenti chiamate RTD (Resistance Thermal Detector), sono trasduttori elettrici
passivi che sfruttano la proprietà dei metalli di variare la resistività elettrica con la temperatura
secondo la legge approssimata:
Dove Ro è la resistenza nominale (a 0 C°).
Le termoresistenze sono costituite da sottili fili di materiale conduttore (Platino, Nikel o Tungsteno)
con diversi valori di resistenza nominale avvolti su supporti isolati, di forma cilindrica o piatta, oppure
da un film metallico deposto su di un piccolo supporto piatto di ceramica.
Gli RTD sono sensori di temperatura per misure assolute; hanno una buona sensitività, sono molto
stabili e richiedono un circuito di interfaccia semplice.
Termoresistenze
La resistenza di un metallo è in generale una funzione complessa della temperatura. Però per i metalli
utilizzati nella realizzazione di termoresistenze, cioè Platino, Nikel o Tungsteno la funzione che lega la
resistenza alla temperatura può essere descitta con buona approssimazione con uno sviluppo in serie
di potenze.
Termoresistenze
Nel caso del platino si utilizza l‟equazione di Callendar-van Dusen:
con A, B e C costanti e dipendenti dalle proprietà del platino utilizzato per realizzare il sensore .
Per il range di temperature che va da 0 a 420 °C, la variazione di resistenza non dipende dalla
potenza terza della temperatura e la funzione si riduce all‟equazione di Callendar, che si compone di
un termine lineare e di un termine quadratico che comincia a pesare oltre un certo valore di
temperatura:
Per temperature sotto il punto di congelamento dell‟acqua e fino a -200 °C occorre invece introdurre
la correzione di van Dusen e considerare le potenze fino al terzo ordine.
Termoresistenze
Le RTD al platino sono i dispositivi più accurati e stabili nel range di temperatura 0 - 500 °C anche se
possono misurare temperature fino a 800 °C (in genere per valori maggiori di 600 °C si usano RTD al
Tungsteno).
Il metallo utilizzato e la resistenza nominale vengono combinati per identificare la tipologia del
componente nei cataloghi dei costruttori.
Una termoresistenza a filo di Platino con Ro = 100
viene denominata PT100, ed è caratterizzata, per
un campo di misura da 0 C° a 100 C°, utilizzando l‟equazione approssimata:
da un parametro α = 39.27 × 10-4.
Sempre per tale sensore è possibile identificare l‟andamento della resistenza con la temperatura
mediante l‟equazione di Callendar nell‟intervallo di temperature comprese tra 0 C° a 420 C°:
con A = 3.986 × 10-3 e B = 5.88 × 10-7.
Termoresistenze
Gli RTD presentano bassi valori di resistenza. Pertanto è necessario adottare circuiti di misura a
ponte di Wheatstone, che però fornisce una tensione che varia linearmente solo per piccole variazioni
di resistività dell‟elemento di misura.
Infatti solo se R/R << 1, è possibile approssimare la caratteristica ad una caratteristica lineare:
Termoresistenze
Poichè la resistività tipica di un buon conduttore è di 0.1
/m, i cavi di collegamento tra sensore e
ponte possiedono in genere una resistenza paragonabile a quella del sensore, influendo
negativamente sulla misura. Per evitare l‟effetto delle resistenze parassite RC dei cavi di collegamento
è possibile adottare una configurazione a ponte Wheatstone a 3 fili.
In tal caso infatti si ha:
Scegliendo R1 = R2 si ottiene la relazione fondamentale del ponte Wheatstone senza resistenze parassite:
Termoresistenze
Misure più accurate possono essere ottenute alimentando il sensore con un generatore di corrente di
precisione e misurando la tensione ai capi del sensore. Anche in questo caso però è necessario
ricorrere ad una configurazione a quattro collegamenti per eliminare gli effetti delle resistenze
parassite dei cavi di collegamento che altrimenti si sommerebbero a quella del sensore.
In questa configurazione vi sono due circuiti distinti.
Un primo circuito serve ad imprimere una
corrente di riferimento al sensore, mentre un secondo circuito serve ad acquisire il segnale. Sul
circuito di acquisizione non scorre corrente, e quindi le resistenze parassite non producono cadute di
tensione spurie.
Termoresistenze
Indipendentemente dal tipo di collegamento, per trasformare la resistenza in un segnale elettrico
misurabile occorre far circolare corrente nel dispositivo.
Ne consegue un autoriscaldamento per
effetto Joule, secondo il quale la potenza dissipata in calore vale:
L‟autoriscaldamento appare come un errore di misura, ed influisce negativamente sulla misura,
specialmente nelle RTD a film caratterizzate da piccole dimensioni e quindi da resistenza termica
elevata. Dall‟equazione di equilibrio termico a regime infatti si ha :
P
Tsensore Tambiente
Rth
dove Rth è la resistenza termica ed indica l‟incremento di temperatura per autoriscaldamento per ogni
unità di potenza dissipata.
Valori tipici di resistenza termica sono nel range delle centinaia di C°/W in aria ferma e di qualche
decina di C°/W se inseriti in un flusso d‟aria in movimento.
Termistori
Il termistore sfrutta le proprietà dei semiconduttori di variare la conducibilità elettrica con la
temperatura.
Rispetto all‟RTD ha dimensioni molto minori ed un maggiore coefficiente di temperatura (maggiore
sensibilità).
L‟elemento sensibile è un materiale semiconduttore che ha coefficiente di temperatura (TCR)
negativo nei termistori NTC (Negative Thermal Characteristic) e positivo nei termistori PTC (Positive
Thermal Characteristic).
Caratteristiche essenziali dei termistori
Campo di misura: da -100 C° a +150 C°, (da -30 C° a +100 C° per versioni lineari)
Accuratezza: da ±3 a ±20 C°
Resistenza termica molto elevata (1000 C°/W)
Sensibilità elevatissima (da 103 a 106 volte più sensibili degli RTD).
La realizzazione a semiconduttore li rende abbastanza delicati ed inadatti ad impieghi in
condizioni di elevato stress meccanico.
Termistori
In generale la dipendenza della resistenza dalla temperatura in un termistore NTC può essere
approssimata da una funzione esponenziale piuttosto complessa secondo la legge di Steinhart-Hart:
La legge di Steinhart-Hart nella pratica viene però semplificata, escludendo i termini di ordine elevato,
si utilizza quindi un‟espressione del tipo:
Il parametro B, chiamato temperatura caratteristica, viene misurato sperimentalmente tra due valori
ritenuti gli estremi del campo di validità della caratteristica, e dipende quindi dalla sensibilità del
dispositivo:
Termistori
Il coefficiente di temperatura è dato da:
I termistori NTC sono più sensibili alle basse temperature poiché il coefficiente di temperatura si
riduce notevolmente al crescere della temperatura ( è la pendenza della curva R(T)).
Facendo lavorare il sensore in un intervallo limitato di temperature si può linearizzare la caratteristica.
Termistori
Il più semplice circuito per la lettura dell‟uscita di un termistore è un partitore resistivo:
Se RS>>RT si ha:
Particolare attenzione deve essere posta a contenere al massimo l‟autoriscaldamento del sensore per
effetto Joule.
Termistori
Per linearizzare la caratteristica dei un termistore NTC si possono utilizzare opportune reti correttrici,
ciò comporta però una riduzione della sensibilità. Una prima rete correttrice è composta da due
resistenze, rispettivamente connesse in serie ed in parallelo al termistore.
I valori delle due resistenze RS ed RP sono calcolati in modo tale che:
Ove R1 ed R2 sono i valori di resistenza che il termistore assumerebbe alle temperature T1 e T2 nel
caso di caratteristica lineare e RT1 ed RT2 sono i valori che nella realtà sono assunti dal termistore alle
stesse temperature.
Termistori
Una seconda rete correttrice è costituita da una resistenza Rm posta in parallelo al termistore e di
valore pari a quello assunto dal termistore alla temperatura tm posta a metà del campo di misura.
Il circuito corrisponde approssimativamente ad un termistore con una caratteristica lineare del tipo:
Termistori
I termistori PTC, presentano una relazione tra temperatura e resistenza non lineare, con andamento a
gradino o a soglia. Tale relazione è difficilmente approssimabile con un‟equazione matematica, per
cui essa è definita dai costruttori mediante un certo numero di parametri:
resistenza a temperatura ambiente R25
temperatura di transizione T
coefficiente di temperatura
capacità termica e tensione massima.
Termistori
Per la misura continua della temperatura si utilizzano quasi sempre i termistori NTC. Tali sensori sono
molto più sensibili degli RTD e non richiedono particolari procedure di misura (collegamento a 2 fili).
Infatti, grazie alla grande sensibilità del sensore il rapporto segnale/rumore è piuttosto elevato, per cui
l‟effetto delle resistenze parassite nei cavi di collegamento può essere trascurato.
Purtroppo i termistori NTC sono sensori fortemente non lineari, pertanto è necessario introdurre
circuiti correttivi, oppure un adeguata linearizzazione tramite tabelle di valori (Look-Up-Table) ed
interpolazione realizzata per via numerica da un microprocessore.
I termistori PTC hanno un intervallo di funzionamento ristretto e sono usati per la protezione da
sovraccarichi e da surriscaldamento. In tal caso, grazie all‟elevato guadagno ed alla caratteristica a
soglia, sono utilizzati per la realizzazione di sensori ad uscita logica in grado di rilevare il superamento
di una temperatura predefinita. I PTC operano quindi come rivelatori di soglia termica, accoppiati a
circuiti comparatori opportunamente calibrati.
Sensori di temperatura integrati
I sensori di temperatura integrati sfruttano il fatto che nelle giunzioni a semiconduttore (diodi e
transistor) la tensione e la corrente sono fortemente dipendenti dalla temperatura. La dipendenza è
peraltro notevolmente lineare.
Nel caso di una giunzione PN dalla relazione tra corrente e tensione è possibile ricavare la seguente
relazione tra tensione e temperatura:
dove Eg è il gap di energia del materiale,
K è una costante del materiale indipendente dalla
temperatura, q è la carica dell‟elettrone e k è la costante di Boltzmann.
Sensori di temperatura integrati
Pertanto, quando la giunzione è sottoposta ad una corrente costante la tensione è linearmente
dipendente dalla temperatura e la sensibilità del dispositivo è data da:
Sulla base di tali considerazioni si realizzano, in forma di circuiti integrati, sensori di temperatura
lineari con uscita in tensione o in corrente, accurati e poco costosi, che però funzionano in un range
di temperatura limitato (da -65 a 150 °C circa).
Sensori di temperatura integrati
Sensore di temperatura a diodo con uscita in tensione
Sensore di temperatura a diodo con uscita in corrente
Pirometri
Un pirometro è un trasduttore elettrico ad infrarossi che funziona sul principio della trasmissione del
calore per radiazione elettromagnetica e sulla legge di Plank che la regola.
Ipotizzando che l‟intera radiazione termica della sorgente colpisca il sensore per la legge di StefanBoltzmann, che è ottenuta dalla legge di Plank per integrazione su tutte le lunghezze d‟onda, si
ottiene:
dove
(<1) è il potere emissivo per tutte le lunghezze d‟onda e
è la costante di Stefan-Boltzmann.
Il pirometro produce una risposta approssimativamente proporzionale a T4, è pertanto inerentemente
non lineare. E‟ un sensore non invasivo, costoso e molto stabile che permette di misurare anche
temperature elevate; la sua sensibilità è più accentuata alle alte temperature che non alle basse.
Il pirometro è usato per temperature anche superiori ai 1450 °C dove altri sensori hanno vita breve ed
è utile anche nel controllo di processi la cui temperatura varia da 200-1450 °C ed in cui è essenziale la
mancanza di contatto con il sistema.
Pirometri
La misura fornita da un pirometro è approssimata perchè non tutta la radiazione termica del corpo
riesce a raggiungere il sensore.
Le lenti o gli specchi utilizzati per focalizzare la radiazione sul
sensore infatti si comportano come dei filtri ottici, generalmente opachi per onde lunghe e corte e
trasparenti nel visibile e nel vicino infrarosso.
Sensori di corrente
Il modo più semplice di eseguire la misura di corrente è il metodo volt-amperometrico, in cui si
misura la caduta di tensione su di una resistenza di misura percorsa dalla corrente incognita.
Questo metodo molto semplice e poco preciso è utilizzato in pratica solo per realizzare protezioni dei
dispositivi elettronici di potenza e sistemi di controllo della corrente.
Risulta però inefficace per misurare correnti molto elevate, per l‟eccessiva dissipazione di potenza e
per le variazioni di resistività indotte dall‟autoriscaldamento sulla resistenza di sensing.
Sensori di corrente
Alcuni dispositivi elettronici di potenza possiedono un pin supplementare per misurare la corrente
che attraversa il dispositivo con il metodo volt-amperometrico secondo il metodo dello specchio di
corrente. Internamente il pin supplementare è connesso ad alcune centinaia delle migliaia o decine di
migliaia di celle elementari in parallelo che compongono il dispositivo.
La corrente misurabile ai capi del pin di sensing è proporzionale alla corrente che attraversa il
dispositivo, ma molto più piccola, in quanto il rapporto di proporzionalità è dato dal rapporto tra le
celle elementari connesse al pin di sensing ed il totale delle celle elementari.
Si risolve il problema dell‟autoriscaldamento perché la corrente che attraversa la resistenza di
sensing è molto piccola. La misura ottenuta è però in genere poco precisa ed in pratica utilizzabile
solo per realizzare protezioni a soglia per sovracorrente.
Trasformatore di corrente (TA)
I TA sono trasformatori riduttori di corrente e si adoperano ogni qualvolta si deve misurare una
corrente alternata superiore a qualche decina di Ampere. La corrente di secondario è proporzionale a
quella di linea ma molto più piccola (I2=N1/N2 I1) e può quindi essere facilmente misurata.
Il primario di un TA è connesso in serie alla rete, quindi è attraversato dalla corrente di linea. Per
limitare la dissipazione di potenza i TA devono presentare al primario un‟impedenza idealmente nulla.
Ciò è ottenuto con opportuni accorgimenti costruttivi e facendoli funzionare sempre col secondario in
corto circuito, o più precisamente chiuso su un amperometro, che ha un‟impedenza interna
praticamente nulla.
Sensori di corrente ad effetto Hall
Per la misura di correnti elevate si utilizzano sensori isolati ad effetto Hall.
Rispetto ai TA, che
operano tra i 40 ed i 60 Hz, sono in grado di misurare correnti in uno spettro di frequenze molto più
ampio, che va dalla continua fino a 150 kHz.
Per effetto Hall viene generata una tensione V, proporzionale al campo magnetico H, quando su un
elemento metallico sensibile scorre una corrente I. Tale tensione ha direzione perpendicolare sia al
verso di scorrimento della corrente che alla direzione del campo magnetico.
I sensori di corrente ad effetto Hall possono essere di due tipi:
A misura diretta, dove si effettua una misura della tensione prodotta per effetto Hall dalla
corrente incognita.
A compensazione di campo, in tal caso si induce in un circuito elettrico una corrente
proporzionale a quella incognita ma di minore intensità, misurandola poi con un circuito a
misura diretta.
Sensori di corrente ad effetto Hall
Sensori di corrente a misura diretta del campo.
Il circuito magnetico è costituito da un nucleo toroidale aperto, di ferrite o di altro materiale
ferromagnetico. Nell‟apertura è alloggiato il sensore ad effetto-Hall sul quale il nucleo toroidale
concentra il campo magnetico generato dalla corrente elettrica incognita Im.
Attraverso il sensore viene fatta passare una piccola corrente Iref che, accoppiandosi con il campo
magnetico genera per effetto Hall una tensione Vout proporzionale alla corrente Im.
Sensori di corrente ad effetto Hall
Sensori a compensazione di campo.
La struttura generale è simile a quella del sensore a misura diretta, con la differenza che sul nucleo
toroidale è posto un avvolgimento con n2 spire pilotato dall‟uscita dell‟amplificatore (circuito
secondario).
All‟ingresso dell‟amplificatore è presente la tensione V generata per effetto Hall dalla interazione tra i
campi magnetici generati dalla corrente da misurare
nell‟avvolgimento posto sul nucleo toroidale.
Im e dalla corrente I2
che circola
Sensori di corrente ad effetto Hall
L‟uscita dell‟amplificatore pilota un generatore di corrente che fa scorrere la corrente I2
sull‟avvolgimento secondario. L‟avvolgimento è fatto in modo tale che la corrente I2 generi un campo
magnetico che si oppone a quello generato dalla corrente incognita Im. La tensione V è nulla se i due
campi magnetici sono in equilibrio, vale a dire se:
Il sensore si comporta quindi come un circuito di controllo a retroazione, che tende ad annullare la
tensione V agendo sulla corrente I2. In condizione di stabilità si ha (per n1=1):
Il problema è riportato alla misura della corrente I2 che è n2 volte più piccola della corrente originaria,
e quindi facilmente misurabile anche con il metodo volt-amperometrico.
Questo secondo schema risulta leggermente più complesso del precedente per la presenza
dell‟avvolgimento secondario. Tuttavia esso è preferibile e globalmente non risulta più costoso in
quanto consente di utilizzare il sensore ad effetto di Hall nell‟intorno della regione di campo nullo
nella quale la linearità ègarantita anche con dispositivi di classe relativamente economica.
Sensori di Prossimità e sensori Logici
I sensori di prossimità o di presenza sono realizzati in modo da fornire informazioni di tipo logico,
utilizzate per il controllo e la supervisione delle sequenze operative e delle condizioni di
funzionamento del sistema produttivo.
Il rivelatore di soglia è caratterizzato da una certa isteresi, per migliorare la stabilità dell‟uscita
nell‟intorno del punto di commutazione. Caratteristiche qualitative di un sensore logico di prossimità
sono:
l‟ampiezza della banda d‟isteresi
la massima frequenza di commutazione dell‟uscita
l‟estensione del campo d‟azione
Si distinguono sensori di posizione e prossimità con generatori di:
campo magnetico (contatto Reed, effetto Hall)
campo luminoso
campo acustico (ultrasuoni)
Sensori di prossimità a Contatto Reed
I sensori di prossimità a Contatto Reed sono costituiti da lamine di materiale ferromagnetico (FerroNichel) a bassa riluttanza racchiuse da un bulbo di vetro contenente gas inerte.
Il campo magnetico generato da un magnete permanente o da bobine percorse da corrente, in
prossimità del bulbo, induce sulle lamine polarità magnetiche di segno opposto.
La due lamine tendono ad avvicinarsi o allontanarsi, a seconda della metodologia costruttiva
(Contatto Normalmente Aperto o Normalmente Chiuso), chiudendo o aprendo un circuito elettrico.
Sensori di prossimità a Contatto Reed
La realizzazione in un bulbo di vetro garantisce ai contatti un buon livello di protezione da polveri e
umidità.
Tuttavia, poiché il funzionamento del sensore è basato sull‟elasticità delle lamine, il tempo di vita
medio, è relativamente limitato (approssimativamente 108 operazioni).
Occorre fare attenzione ai livelli di tensione o corrente del circuito nel quale il sensore a contatto
Reed viene inserito, in quanto valori elevati possono provocare l‟incollamento dei contatti e, di
conseguenza, una riduzione tempo di vita.
Gli effetti di rimbalzo in seguito alla chiusura del contatto, limitano la frequenza massima di
attivazione.
Sensori di posizione ad effetto Hall
Un sensore di posizione ad effetto Hall è composto dall‟elemento sensibile e da un magnete.
L‟intensità del campo magnetico si riduce (secondo una relazione non lineare) con l‟aumentare della
distanza del magnete dal sensore Hall, così come la tensione generata. Se la tensione generata dal
sensore ad effetto Hall è utilizzata per pilotare un rivelatore di soglia con isteresi, (Trigger di Schmitt),
si ottiene un‟uscita alta se il magnete si avvicina oltre la distanza di azionamento, altrimenti bassa.
I sensori ad effetto Hall si prestano ad una moltitudine di applicazioni, hanno un costo limitato,
elevata frequenza di lavoro (oltre 25 kHz) e elevata linearità nei confronti di variazioni di temperatura
e tensione di alimentazione.
Sensori analogici di prossimità ad effetto Hall
Con un‟adeguata configurazione realizzativa è possibile ottenere sensori ad effetto Hall con
caratteristica tensione/distanza con buona approssimazione lineare in un intorno dell‟origine.
Se il guadagno in tale regione lineare non è troppo elevato (poli magnetici maggiormente distanziati),
si ottiene un sensore analogico di posizione, sebbene con campo di misura molto limitato.
Sensori di posizione rotativi ad effetto Hall
Esistono realizzazioni nelle quali i magneti sono disposti su un elemento in rotazione, è possibile in
tal caso ottenere Sensori di posizione ad effetto Hall rotativi ed inoltre:
sensori di posizione incrementali (encoder magnetici)
sensori analogici di velocità (misura frequenza segnale periodico).
dispositivi per il controllo della commutazione delle fasi nei motori “brushless” a campo
trapezoidale (sincroni, a magneti permanenti), nei quali occorre rilevare il passaggio del
magnete di rotore per le posizioni di commutazione.
Sensori di prossimità induttivi
Nei sensori di prossimità induttivi di tipo attivo, detti anche a correnti parassite, un circuito
oscillatore alimenta un solenoide avvolto su un nucleo di ferrite aperto, in modo tale da realizzare un
generatore di flusso magnetico con linee di flusso che influenzano il campo d‟azione nel quale si
viene a trovare l‟oggetto da rilevare, chiamato azionatore.
La presenza dell‟azionatore, un qualunque oggetto con proprietà conduttive (in genere metallico) in
prossimità del solenoide, fa si che il campo magnetico induca delle correnti parassite sul corpo, a
causa delle quali parte della potenza del campo magnetico viene dissipato.
Sensori di prossimità induttivi
L‟oscillatore è in grado di compensare le perdite solo se l‟azionatore viene mantenuto ad una certa
distanza dal sensore, mantenendo costante l‟ampiezza dell‟oscillazione. Se l‟azionatore si avvicina
oltre tale distanza l‟oscillazione si smorza.
Se l‟ampiezza dell‟oscillazione, rilevata a valle di un filtro passa-basso e di un raddrizzatore da un
trigger con isteresi, diminuisce oltre la soglia impostata, il sensore porta l‟uscita logica al livello alto.
Sensori di prossimità induttivi
Si può dimostrare che la perdita per effetto Joule e quindi lo smorzamento dell‟oscillazione, dipende
dalla distanza dell‟azionatore ed inoltre in modo:
linearmente proporzionale dallo spessore dell‟azionatore;
quadraticamente proporzionale dalla superficie investita dal campo;
quadraticamente proporzionale dalla frequenza del campo magnetico generato;
inversamente proporzionale dalla resistività del materiale. (Si può ottenere maggiore sensibilità
del sensore con materiali maggiormente resistivi es. ferro dolce).
Sensori di prossimità capacitivi
Nei sensori di prossimità di tipo capacitivo l‟elemento connesso ad un oscillatore è un condensatore
a facce piane e concentriche. Il dielettrico è costituito dall‟aria e dall‟oggetto azionatore. L‟azionatore
può anche essere di materiale non metallico, liquido o solido.
L‟oscillazione viene provocata dall‟avvicinamento dell‟oggetto. Infatti, in assenza di oggetti nelle
vicinanze, l'oscillatore LC non funziona per assenza della capacità. Quando un'oggetto si avvicina
nasce una capacità, il cui valore dipende dalla distanza dell‟oggetto (per variazione dello spessore del
dielettrico (oggetti metallici) o variazione della costante dielettrica (oggetti non metallici)).
L'oscillatore inizia a funzionare e genera una tensione alternata che viene filtrata e raddrizzata.
Quando la tensione prodotta supera un determinato livello cambia lo stato del comparatore ad
isteresi in uscita.
Molto spesso questo principio viene sfruttato per la realizzazione di sensori di livello.
Sensori di prossimità ad ultrasuoni
I sensori ad ultrasuoni sfruttano la capacità di molti materiali di riflettere il suono.
La distanza d di un oggetto dal sensore viene determinata inviando un treno di impulsi acustici ad
alta frequenza ed analizzando il tempo di ritardo Tr nella ricezione degli impulsi riflessi dall‟oggetto.
Ove Vc e è la velocità di propagazione delle onde acustiche e θ l‟angolo relativo tra il trasmettitore e il
ricevitore.
Sensori di prossimità ad ultrasuoni
L‟emissione di impulsi acustici si basa sull‟effetto piezoelettrico inverso: ad un elemento (detto
“risuonatore”) di materiale cristallino viene applicato un segnale elettrico alternato, alla frequenza di
risonanza tipica dell‟elasticità meccanica del materiale.
La ricezione degli impulsi, invece, si basa sull‟effetto piezoelettrico diretto, grazie al quale un cristallo
dello stesso materiale del risuonatore, sottoposto a sollecitazioni meccaniche, provocate dell‟onda
acustica, oscillatorie ed alla sua frequenza di risonanza, produce un segnale elettrico analogo a
quello di alimentazione del trasmettitore.
Sensori optoelettronici
Con il termine luce si intende comunemente la radiazione elettromagnetica di lunghezza d‟onda tra 0.4 µm e 0.7
µm. Questa è la radiazione cui è sensibile l‟occhio umano.
La lunghezza d'onda è una funzione inversa della frequenza, si ha infatti:
= c/f
dove:
= lunghezza d'onda; c = velocità della luce = 3×108 m/s; f = frequenza dell'onda
Sensori optoelettronici
I sensori optoelettronici permettono di rilevare la presenza di oggetti di qualunque materiale, purchè
interrompano il flusso luminoso. I sensori optoelettronici possono essere del tipo:
A diffusione – il sensore risponde a qualunque oggetto che riflette la luce.
A retroriflessione - Il sensore risponde solo alla luce riflessa da una ben determinata superfice
detta riflettore.
A sbarramento – Il sensore risponde a qualunque interruzione del flusso luminoso
Gli elementi fondamentali di un sensore ottico sono la sorgente (o emettitore), la linea di
trasmissione ed il fotorivelatore (o fotoricevitore).
Emettitori di flusso luminoso
Il fotoemettitore nelle prime realizzazioni era una lampada ad incandescenza, oggi però è sostituito
da dispositivi policromatici (a emissione non coerente) a stato solido.
Il fotorivelatore, è realizzato con fotodiodi o con fotoresistenze, dispositivi sensibili ad uno spettro di
frequenze molto ampio.
La linea di trasmissione può essere libera oppure guidata come nel caso delle fibre ottiche.
Fotoemettitori
Diodi LED
Un LED (Light Emitting Diode) è costituito da una giunzione P-N, realizzata con arseniuro di gallio o con
fosfuro di gallio, in grado di emettere radiazioni luminose quando è attraversata da una corrente dell‟ordine
delle decine di mA.
Il funzionamento del LED si basa sul fenomeno detto "elettroluminescenza", dovuto alla emissione di fotoni
(nella banda del visibile o dell'infrarosso) prodotti dalla ricombinazione degli elettroni e delle lacune allorché la
giunzione è polarizzata in senso diretto.
Poichè la luce emessa da un LED è direttamente proporzionale alla corrente che lo attraversa, tale dispositivo
risulta particolarmente adatto alla trasmissione di segnali analogici tramite modulazione dell'intensità
luminosa. Diversamente dalle comuni lampade a filamento un LED emette luce a bassa temperatura e può
lampeggiare a frequenze superiori al Mhz;
A seconda della lunghezza d‟onda della luce prodotta si parla di dispositivi:
LED (Light Emitting Diode), con emissioni all‟interno della fascia visibile.
IRED (Infra-Red Emitting Diode), con emissione nel campo infrarosso.
Fotorivelatori
Un fotorilevatore converte un segnale luminoso in un segnale elettrico, in genere in una tensione. Esistono
fotorilevatori che sfruttano diversi principi fisici.
Sensore
Termopile
Principio fisico
Conversione dell‟energia dei fotoni in calore
Cristalli piroelettrici
Fotoresistenze
Fotodiodi
Effetto fotoelettrico interno
Fototransistori
CCD
Diodi a vuoto
Fotomoltiplicatori
Effetto fotoelettrico esterno
(Emissione di elettroni per assorbimento
di fotoni nei metalli)
Fotorivelatori
I fotorivelatori più comuni sfruttano i primi due principi fisici, si hanno quindi:
Fotorivelatori termici: sfruttano la conversione dell‟energia dei fotoni in calore e sono caratterizzati da una
sensibilità costante dall‟infrarosso all‟ultravioletto. Poiché si comportano da filtro passa-alto (con frequenza di
taglio tra 1 Hz e 100 Hz), devono operare con luce intermittente.
Fotorilevatori a semiconduttore: sfruttano l‟effetto fotoelettrico interno, cioè la variazione di conduttività dovuta
alla creazione di coppie elettrone-lacuna nelle giunzioni di semiconduttore colpite da fotoni. Hanno sensibilità
variabile in funzione della frequenza, in quanto non tutta la luce incidente è in grado di produrre effetto
fotoelettrico, ma solo quella di lunghezza d‟onda inferiore ad un valore
soglia fotoelettrica.
s
, dipendente dal materiale, detto
Fotorivelatori
Termopila
Una termopila rileva l‟emissione infrarossa e la converte in un segnale elettrico. Una termopila è costituita da
un insieme di microscopiche termocoppie connesse in serie e disposte in modo che la radiazione incidente
colpisca e provochi un innalzamento della temperatura di una delle due serie di giunzioni (giunzioni attive),
mentre l‟altra serie di giunzioni (giunzioni di riferimento) rimane a temperatura costante, perchè schermata dalla
radiazione e connessa ad un pozzo di calore.
Fotorivelatori
Cristallo piroelettrico
I materiali piroelettrici se sottoposti ad una variazione di temperatura, modificano la propria polarizzazione
interna. Tale variazione di polarizzazione è rilevabile esternamente come differenza di potenziale tra due
armature metalliche a contatto con superfici opposte. Se una delle due armature è sottoposta ad illuminazione
intermittente, tra le due armature si preleva un segnale proporzionale all‟intensità della luce assorbita.
Fotorivelatori
Fotoresistenze
La fotoresistenza è un dispositivo a semiconduttore la cui conducibilità elettrica aumenta quando è colpito
dalla luce. Infatti, un fotone che colpisce un elettrone impegnato in un legame covalente cede a questo la sua
energia. Se l‟energia ceduta è sufficiente a liberare l‟elettrone dal legame si origina nel semiconduttore una
coppia elettrone-lacuna in grado di partecipare alla conduzione elettrica.
I materiali più usati per realizzare le fotoresistenze sono il solfuro di cadmio e il solfuro di piombo . Il primo ha
una risposta spettrale centrata nella radiazione visibile, il secondo è sensibile anche alle radiazioni ultraviolette.
Fotorivelatori
Il principale difetto delle fotoresistenze consiste nella bassa velocità di ricombinazione delle coppie lacunaelettrone generate dalla radiazione elettromagnetica che, se da un lato incrementa la sensibilità d‟altro lato
rallenta la risposta a segnali luminosi rapidamente variabili nel tempo.
Le fotoresistenze commerciali presentano una resistenza di buio dell‟ordine del M
condizioni di oscurità) ed un valore dell‟ordine di 100
(resistenza elettrica in
quando sottoposta a forti flussi luminosità (intorno a
1000 lux). Possono dissipare potenze dell‟ordine di 1-2 W. I tempi di salita e di discesa risultano superiori a 50100 ms ed aumentano al diminuire dell‟intensità della luce incidente.
Fotorivelatori
Fotodiodi
Un fotodiodo è una giunzione PN drogata asimmetricamente. La zona P, infatti, è molto più drogata della zona
N, è molto sottile, ed è disposta molto vicino alla struttura esterna.
Fotorivelatori
Un fotodiodo opera polarizzato inversamente. In queste condizioni, il campo elettrico di built-in tende ad
aumentare di intensità favorendo la creazione di una zona di svuotamento (depletion region). Nel momento in
cui un fotone incide sulla superficie del fotodiodo, cede una quantità di energia pari a:
Eg = hc/
Essendo h la costante di Plank.
Se tale energia è maggiore del bandgap tra banda di valenza e banda di conduzione, viene generata una coppia
elettrone-lacuna libera che
è soggetta al campo elettrico generato dalla differenza di potenziale applicata.
L'elettrone viene quindi attratto verso la zona N mentre la lacuna verso la zona P. A causa della assenza di una
coppia elettrone-lacuna nella zona svuotata, la regione di svuotamento non è più neutra. Il dispositivo
compensa questa situazione con un movimento di elettroni-lacune prelevati dal generatore di polarizzazione,
causando così una fotocorrente inversa che rappresenta il segnale elettrico prodotto dall'incidenza del fotone.
Fotorivelatori
L‟intensità della corrente inversa generata per effetto fotoelettrico dipende dall‟intensità della radiazione
luminosa e dalla tensione presente ai capi del fotodiodo.
Fotorivelatori
In un fotodiodo a giunzione molte coppie elettrone lacuna si formano al di fuori della zona interessata dal
campo elettrico e quindi si ricombinano senza contribuire alla corrente inversa. Si ha quindi una bassa
efficienza quantica.
Per migliorare l‟efficienza quantica è necessario allargare la zona di svuotamento, ciò è quello che si ottiene nei
fotodiodi PiN, introducendo uno strato di semiconduttore quasi intrinseco.
Alcuni fotodiodi sfruttano invece l‟effetto valanga e sono caratterizzati da un elevato guadagno e da una
risposta particolarmente veloce.
Fotorivelatori
Le caratteristiche di un fotodiodo dipendono fortemente dal materiale utilizzato.
Fotorivelatori
Fototransistori
Un fototransistor è un transistor bipolare a giunzione con la base lasciata non connessa. Poichè il
fototransistor viene inscatolato in un contenitore trasparente in modo che la luce possa raggiungere la
giunzione del collettore di base la fotocorrente primaria agisce come corrente di base.
Iph ≈ Iph0
Fotorivelatori
Il fototransistor ha prestazioni simili a quelle del fotodiodo, ma con una sensibilità alla luce molto maggiore,
grazie al fatto che gli elettroni che sono generati dai fotoni nella giunzione del collettore di base sono iniettati
nella base e la corrente così prodotta viene successivamente amplificata. Per contro un fototransistor ha una
risposta nel tempo molto meno rapida del fotodiodo.
Sensori di prossimità optoelettronici
I sensori optoelettronici possono essere realizzati con coppie emettitore/ricevitore separate, oppure
integrate in un unico dispositivo accoppiato ad un catarifrangente.
Sensori di prossimità optoelettronici
Se l‟emettitore è di tipo policromatico il fascio luminoso emesso e lo spazio rilevato dal ricevitore
hanno entrambi forma conica (apertura angolare).
Una apertura angolare più ampia facilita l‟allineamento dei componenti in fase di installazione.
Sfruttando le possibilità di incanalamento delle radiazioni luminose all‟interno di fibre ottiche, si
possono ottenere aperture angolari dell‟ordine dei 60°.
Sensori di prossimità optoelettronici
Un‟apertura angolare molto grande significa anche distanze di lavoro fra emettitore e ricevitore più
basse, in quanto solo una piccola parte della luce emessa (e quindi dell‟energia consumata
dall‟emettitore) viene effettivamente ricevuta, ed inoltre può generare errori di rilevazione a causa di
effetti di riflessione su superfici lucide.
La dimensione minima di un oggetto rilevabile è, in ogni caso, dipendente solo dal diametro
dell‟ottica.
Si rendono necessari alcuni accorgimenti per evitare che il rivelatore sia attivato in maniera
indesiderata anche da fonti luminose esterne.
Una soluzione è quella di utilizzare filtri ottici che blocchino la luce visibile e facciano passare solo la
radiazione all‟infrarosso.
Sensori di prossimità optoelettronici
Una seconda soluzione è quella di utilizzare una modulazione della corrente di alimentazione del fotoemettitore, in modo che il ricevitore possa filtrare la componente modulata ad impulsi del segnale
ricevuto dalla luce ambiente.
La frequenza di oscillazione è tipicamente di qualche centinaio di Hz con impulsi della durata di
qualche s.
Sensori di prossimità optoelettronici
Un‟altra soluzione
molto comune è l‟accoppiamento tra un emettitore LED seguito da un filtro
polarizzatore, ed un rivelatore preceduto da un filtro polarizzato in maniera identica e perfettamente
allineato.
Sensori di prossimità optoelettronici
Un‟altra soluzione
molto comune è l‟accoppiamento tra un emettitore LED seguito da un filtro
polarizzatore, ed un rivelatore preceduto da un filtro polarizzato in maniera identica e perfettamente
allineato.
Sensori di posizione
E‟ possibile misurare distanze dell‟ordine di qualche mm sfruttando la riflessione della luce.
Si
utilizza un sistema composto da un fotoemettitore, un fotorivelatore ed una sonda a fibra ottica. Il
raggio luminoso trasportato dalla fibra ottica è focalizzato da una lente in forma tronco conica. La
ricezione della luce riflessa dalla superfice dell‟oggetto avviene anch‟essa secondo un‟apertura
tronco conica.
Sensori di posizione
L‟intensità del segnale luminoso ricevuto è funzione della sovrapposizione delle basi dei due tronchi
di cono ed entro certi limiti dipende linearmente dalla distanza tra l‟oggetto e la sonda.
Nella pratica, per ottenere le migliori prestazioni in termini di sensibilità e portata, la sonda contiene
sia terminazioni delle fibre ottiche connesse al foto emettitore che di quelle connesse al
fonorivelatore.
Sensori d‟immagine
La visione artificiale si articola su tre momenti: percezione, elaborazione e decisione. La fase di
percezione si sviluppa attraverso l‟impiego di sensori ottici o sensori d‟immagine.
I sensori
d‟immagine di pratico utilizzo sono il sensore a tubo catodico ed il sensore a stato solido di tipo CCD.
Sensori d‟immagine
CCD
Un CCD (Charge Coupled Device) è un dispositivo caratterizzato da una matrice di elementi
semiconduttori, denominati pixel (picture elements), disposti a scacchiera sulla superficie di un
cristallo di silicio, opportunamente trattato e integrato in un microchip. Ogni dispositivo
semiconduttore è
in grado di accumulare una carica elettrica
radiazione elettromagnetica che li colpisce.
proporzionale all'intensità della
Sensori d‟immagine
Ogni pixel è costituito fondamentalmente da un condensatore MOS.
I fotoni incidenti generano
coppie elettrone-lacuna nel semiconduttore. Gli elettroni sono attratti dall‟elettrodo positivo.
I pixel sono organizzati su linee ed accoppiati in modo che ognuno di essi, sollecitato da un impulso
elettrico, possa trasferire la propria carica ad un altro elemento adiacente.
Sensori d‟immagine
La lettura dell‟immagine avviene per righe. La carica accumulata da ogni singolo pixel della riga viene
resa disponibile all‟uscita spostandola sequenzialmente da un pixel al successivo, fino alla fine della
riga, inviando al dispositivo una sequenza temporizzata d‟impulsi.
Un opportuno software ricostruisce poi la matrice dei pixel che compongono l‟immagine proiettata
sulla superficie del CCD.
Sensori d‟immagine
I pixel sono sensibili all‟intensità della radiazione luminosa, non alla lunghezza d‟onda. Per ottenere
immagini a colori si utilizzano allora matrici con gruppi di tre pixel adiacenti, ciascuno con un filtro
per uno dei colori primari (rosso, verde, blu).
Sensori di posizione optoelettronici
LASER
Un dispositivo LASER (Light Amplification by the Stimulated Emission of Radiation, ovvero Amplificazione di
Luce tramite Emissione Stimolata di Radiazioni) è in grado di emettere un fascio di luce caratterizzato da:
Elevata direzionalità: Al contrario delle sorgenti tradizionali il laser permette di emettere la radiazione in
un'unica direzione.
Elevata brillanza: Nei laser la quantità di energia emessa per unità di angolo solido è incomparabilmente più
elevata rispetto alle sorgenti tradizionali. In particolare è elevato il numero di fotoni per unità di frequenza.
Monocromaticità: La banda di emissione è estremamente ridotta.
Coerenza : Mentre nell'emissione spontanea ogni fotone viene emesso in maniera casuale rispetto agli altri,
nell'emissione stimolata ogni fotone ha la stessa fase del fotone che ha indotto l'emissione. La fase viene
mantenuta nel tempo e nello spazio.
In particolare le caratteristiche di monocromaticità e coerenza di un LASER permettono di realizzare
strumenti di misura di distanze, spostamenti e velocità calcolando il tempo morto (flight time). E‟
anche possibile determinare spostamenti piccolissimi, anche dell'ordine del millesimo di millimetro
sfruttando il metodo interferometrico o il metodo della triangolazione.
Sensori di posizione optoelettronici
La misura della distanza di un oggetto può essere effettuata calcolando il tempo intercorso
(dell‟ordine dei s) dall‟invio di un impulso laser, all‟istante in cui il segnale riflesso dall‟oggetto viene
rilevato dal sensore. Tali sensori inviano una serie di impulsi e permettono pure di calcolare la
velocità dell‟oggetto, che risulta proporzionale alla variazione del tempo di ritardo nella ricezione dei
segnali riflessi da due impulsi successivi.
Se la velocità dell‟oggetto ha una componente ortogonale al fascio laser, questa non può essere
rilevata, generando un errore nel calcolo della velocità. Tale errore è in genere trascurabile se l‟angolo
tra la traiettoria dell‟oggetto ed il fascio laser è inferiore a 10°.
Sensori di posizione optoelettronici
Il metodo interferometrico permette di misurare distanze micrometriche ad alta precisione misurando
lo sfasamento tra due radiazioni, ottenute mediante specchi da uno stesso raggio laser. Se i cammini
ottici sono uguali l‟intensità della radiazione rilevata è massima, piccole variazioni tra i due cammini
ottici (anche dell‟ordine di 10 -9m) causano invece uno sfasamento tra i due segnali e quindi una
riduzione dell‟intensità del segnale somma dei due.
Sensori di posizione optoelettronici
Sensori basati sul principio della triangolazione sono molto diffusi nel controllo della qualità e nella
taratura di impianti di produzione industriale.
l‟ingrandimento ottico I e la deviazione
di un corpo dalla legge:
Per il principio della triangolazione, noto
x del fascio riflesso, è possibile calcolare lo spostamento z
Sensori tattili
Un sensore tattile è in grado di misurare la forza di contatto agente sulla propria superficie sensibile.
Un semplice sensore tattile può essere ottenuto utilizzando un elastomero impregnato di carbone,
sfruttando il fatto che la resistività cambia in modo proporzionale alla forza agente.
Altri sensori tattili utilizzano dispositivi piezoelettrici.
Sensori tattili
In analogia ai sensori d‟immagine, i sensori tattili possono essere organizzati in matrici di taxtel
(tactile element) in modo da ottenere un‟informazione globale sulle forze agenti su una superfice in
forma di immagine tattile.
Sensori di fumo
I rivelatori di fumo sono dispositivi sensibili alla presenza di fumo, utilizzati come allarmi antincendio.
Si dividono in tre categorie:
Rivelatori puntiformi a ionizzazione
Rivelatori puntiformi ottici a diffusione
Rivelatori ottici lineari ad estinzione
Sensori di fumo
Rivelatori puntiformi a ionizzazione
I rivelatori puntiformi a ionizzazione sono basati sulla ionizzazione dell'aria e riescono a rilevare
anche fumi non particolarmente opachi impossibili da rilevare con sensori ottici.
Il rivelatore è costituito da due piastre elettriche cariche e da una sorgente radioattiva (Americio 241 o
Radio 226) di particelle . Tali particelle ionizzano l‟aria. In assenza di fumo si avranno tante cariche
positive quanto quelle negative. Queste verranno attratte dalle due piastre in maniera tale da formare
una piccola corrente di ionizzazione che può venire facilmente misurata. In presenza di fumo le
molecole di fumo neutralizzano alcuni ioni provocando un abbassamento della corrente.
Questo rivelatore può essere migliorato comparando le correnti generate da due rivelatori identici:
uno esposto all‟aria e uno chiuso. In questo modo si riducono i problemi dovuti all‟umidità che
influisce in maniera rilevante sulla ionizzazione dell‟aria.
Sensori di fumo
Rivelatori puntiformi ottici a diffusione
All‟interno dei rivelatori fotoottici a diffusione c'è una sorgente di luce nel campo dell'infrarosso posta
in una zona nella quale può entrare il fumo. Una parte ricevente sensibile alla luce infrarossa è posta
in una camera attigua alla parte emittente, ma non può riceverne il segnale perché è otticamente
schermata da una parete e da un labirinto ottico. La presenza del fumo, che ha la possibilità di entrare
nel rivelatore, riflette la luce emessa dal LED ad infrarossi (effetto Tyndal), creandogli un percorso
fino al ricevitore, il quale emette così il segnale di allarme.
Sensori di fumo
Rivelatori ottici lineari a estinzione
I rivelatori lineari di fumo sono costituiti da un trasmettitore e da un ricevitore alloggiati all'interno
dello stesso contenitore e quindi abbinati ad un catarifrangente, oppure fisicamente separati. Nel
primo caso le distanze tra rivelatore e catarifrangente dalla parte opposta può arrivare a poche decine
di metri, mentre nella versione con trasmettitore e ricevitore separati si può arrivare anche a coprire
distanze di 100 m.
Il trasmettitore invia un raggio di luce infrarossa con una specifica frequenza ed intensità , il ricevitore
misura l'intensità del raggio ricevuto, se il raggio è oscurato dalla presenza di fumo, il sensore del
ricevitore è colpito da un'intensità inferiore al normale e genera un allarme. Per evitare falsi allarmi,
come quelli causati ad esempio da un ostacolo fisico che interrompe il fascio luminoso, questi
rivelatori si attivano solo quando la luce è interrotta in modo discontinuo.
Acquisizione di segnali per l‟elaborazione digitale.
Il segnale generato dai trasduttori in genere non è idoneo per la diretta elaborazione da parte dell’unità di
governo che realizza un algoritmo di controllo, ma occorre interporre uno o più stadi di trattamento del segnale
in cui vengono effettuate tutte le operazioni necessarie alla corretta acquisizione del segnale
Acquisizione di segnali per l‟elaborazione digitale.
Scelta la lunghezza di parola in base all‟accuratezza desiderata, occorre scegliere i componenti della
catena di acquisizione in modo che il bilancio totale dell‟errore soddisfi la relazione,
ove Vs è il campo di variazione del segnale d‟uscita del sensore e 2N la lunghezza di parola (numero di
bit) del convertitore analogico digitale.
L‟errore complessivo introdotto dalla catena di acquisizione è:
dove ei sono tutte le possibili sorgenti di errore introdotte dal trasduttore e dalla catena di acquisizione.
Condizionamento del segnale
Lo stadio di condizionamento del segnale comprende tutti i circuiti che trasformano i segnali di uscita
dei sensori, spesso non omogenei per natura (corrente, tensione, resistenza, ecc.), per livello, e per tipo
(tensione continua, alternata, pulsante, ecc.) in segnali elettrici di tipo omogeneo adatto all‟elaborazione
da parte dell‟unità di governo.
Le principali funzioni dello stadio di condizionamento sono:
Attenuazione/amplificazione di segnali troppo elevati/bassi.
Eliminazione di disturbi sovrapposti al segnale utile (filtraggio).
Isolamento galvanico dei dispositivi elettronici di elaborazione dalla fonte di segnale.
Trasformazione in corrente dei segnali di tensione generati dai sensori per rendere possibile la
trasmissione su medie-lunghe distanze.
I circuiti di condizionamento si distinguono in:
Attivi, se fanno uso di componenti amplificatori, per la messa in scala o l‟isolamento.
Passivi, come ad esempio i filtri, i circuiti di attenuazione, i convertitori AC/DC, corrente-tensione
ecc.
Amplificatori
E‟ spesso necessario introdurre un dispositivo che funga da adattatore elettrico tra i trasduttori e i
moduli di elaborazione del segnale in modo da compensare.
Tensione di uscita non idonea. L‟uscita dei trasduttori in genere ha un livello troppo basso, non
idoneo alla successiva conversione in formato digitale.
Elevata impedenza di uscita dei trasduttori
Sbilanciamento della impedenza di uscita di trasduttori con uscita differenziale
Tensione di modo comune elevata
Inoltre può essere necessario:
Isolare elettricamente il trasduttore dal circuito di acquisizione. Ciò è spesso richiesto per motivi
di sicurezza, oppure per migliorare l‟immunità ai disturbi ambientali.
Proteggere i circuiti elettrici del sistema di acquisizione da possibili danneggiamenti nel caso in
cui il trasduttore sia inserito in circuiti di elevata potenza.
Amplificatori Operazionali
Caratteristiche ideali di un amplificatore operazionale sono:
Guadagno di tensione ad anello aperto ∞
Impedenza d‟ingresso ∞
Impedenza d‟uscita nulla
Larghezza di banda ad anello aperto ∞
L‟amplificatore operazionale è utilizzato sempre in configurazione retroazionata, per evitare che esso
saturi (Vout = Vcc) anche per piccoli segnali in ingresso.
Con la retroazione si ottiene anche un
notevole miglioramento delle prestazioni dinamiche del circuito, soprattutto in termini di larghezza di
banda.
Amplificatori di strumentazione
Le applicazioni tipiche di un amplificatore operazionale nel campo del condizionamento dei segnali
riguardano la realizzazione di:
Amplificatori invertenti e non invertenti
Sommatori analogici
Amplificatori di corrente
Convertitori tensione-corrente
Amplificatori differenziali e amplificatori per strumentazione
Amplificatori ponte
Integratori
Differenziatori
Amplificatori di strumentazione
L‟amplificatore di strumentazione è un dispositivo derivato dall'amplificatore differenziale: rispetto a
questo presenta due operazionali in più che migliorano (aumentandola) l'impedenza di ingresso e
permettono di variare l'amplificazione del segnale differenziale d'ingresso V in variando un solo
componente R g.
Normalmente viene fornito come un unico chip con due pin a cui va connesso il resistore esterno Rg.
Amplificatori di strumentazione
L‟amplificatore di strumentazione è caratterizzato da:
una elevata impedenza di ingresso
basse correnti di polarizzazione
elevata reiezione della tensione di modo comune
ingressi differenziali ben bilanciati
caratteristiche elettriche stabili al variare della temperatura.
Filtri
L‟ambiente industriale è caratterizzato dalla presenza di una moltitudine di disturbi elettromagnetici
che possono alterare il contenuto informativo dei segnali utili.
Per eliminare i disturbi è necessario introdurre degli stadi di filltraggio, che modificano cioè la
caratteristica spettrale del segnale, eliminando le armoniche a determinate frequenze. I filtri possono
essere descritti attraverso la funzione di trasferimento T(s) o la funzione di attenuazione A(s):
In base alla banda passante i filtri si distinguono in:
Passa-basso (Low-pass)
Passa-alto (High-pass)
Passa-banda (Band-pass)
Elimina-banda (Band-reject o Notch-Filter)
I filtri più utilizzati sono i passa-basso, poichè i disturbi hanno un contenuto armonico a frequenza
molto più elevata del segnale utile. L‟uso di filtri notch (elimina-banda), si rende necessario invece per
eliminare possibili risonanze.
I filtri possono essere analogici, cioè realizzati con circuiti elettronici, in genere in forma integrata, o
digitali, cioè implementati numericamente con un microprocessore.
Filtri
In un filtro ideale si ha transizione a gradino tra la banda passante e la banda oscurata. Nei filtri reali
invece c‟è una zona di transizione, inoltre è spesso presente un ripple della banda passante.
Pertanto, una certa attenuazione viene introdotta anche per alcune armoniche del segnale utile.
L‟errore indotto dall‟attenuazione del filtro nel segnale digitalizzato deve essere inferiore a 1/2 LSB.
Filtri analogici
Filtri passivi RLC: adatti a realizzazioni in forma discreta poiché le induttanze sono difficili da
realizzare nei circuiti integrati.
Filtri attivi RC: in questi filtri si utilizzano amplificatori, in grado di “emulare” la funzione di
trasferimento di una induttanza. Sono però affetti da problemi legati alle dimensioni massime e alla
precisione ed alla stabilità delle resistenze nelle realizzazioni con circuiti integrati.
Filtri attivi a condensatori commutati: sono i più idonei all‟integrazione, poichè “simulano” le
resistenze.
Filtri digitali
Infinite Impulse Filter (IIR) o Filtri Ricorrenti, il valore di uscita dipende dai campioni precedenti
dell‟ingresso e dai valori precedenti dell‟uscita.
Finite Impulse Filter (FIR) o Filtri Non Ricorrenti, il valore di uscita dipende solo dai campioni
precedenti dell‟ingresso. La loro implementazione richiede maggiore memoria degli IIR (più campioni
per realizzare la stessa azione filtrante), ma non essendo “retroazionati” non hanno problemi di
stabilità.
Aliasing
Aliasing dovuto al campionamento: come noto, un segnale campionato ha un andamento spettrale
caratterizzato da ripetizioni dello spettro originario centrate su multipli della frequenza di
campionamento. Pertanto, per evitare la sovrapposizione delle componenti spettrali occorre utilizzare
una frequenza di campionamento fc che rispetti il teorema di Shannon:
dove fmax è la larghezza dello spettro del segnale originario, e fc,min = 2fmax viene detta anche frequenza
di Nyquist.
Aliasing dovuto ai disturbi: se vi sono componenti di rumore a frequenza maggiore di fmax ed il
campionamento viene effettuato con frequenza prossima a quella di Nyquist, il rumore si sovrappone
irrimediabilmente alle bande di interesse nello spettro del segnale campionato.
Le possibili soluzioni al problema dell‟aliasing sono:
Presampling cioè l‟inserimento di filtri passa-basso prima del campionamento. In questo caso
si parla di Filtri anti-aliasing.
Oversampling cioè il campionamento a frequenza molto maggiore di fc,min (8 ÷ 500 × fmax), ed il
successivo filtraggio digitale del segnale.
Aliasing
In realtà la frequenza di Nyquist va considerata come un valore limite teorico. In pratica infatti si
utilizza una frequenza di campionamento superiore per i seguenti motivi:
l‟ipotesi del teorema di Shannon è che il segnale sia ricostruito a partire dallo spettro
campionato con un ricostruttore ideale non realizzabile in un sistema di controllo.
il sistema fisico controllato si trova a ricevere in ingresso degli scalini di ampiezza dipendente
dal tempo di campionamento. Queste variazioni, se troppo brusche, possono sollecitare
dinamiche non modellate e fare insorgere oscillazioni.
all‟interno di un periodo di campionamento, il sistema evolve in catena aperta. Campionare a
frequenza maggiore permette di controllare meglio le eventuali oscillazioni legate alle
dinamiche trascurate.
il periodo di campionamento impone anche un ritardo inevitabile nella risposta del sistema.
Minore èquesto ritardo, minori sono le problematiche legate alla stabilità.
Isolatori galvanici.
Spesso la parte operativa di una macchina automatica si trova ad operare a tensioni e correnti molto
elevate, potenzialmente dannose sia per l‟uomo che per la circuiteria dell‟unità di governo.
Nel caso in cui i collegamenti a massa siano differenti (e molto distanti tra loro) per le sorgenti di
segnale e per i dispositivi di misura, si deve tener conto della possibile differenza di potenziale fra le
due masse di riferimento, che può essere anche di notevole entità.
Per evitare che queste problematiche possano danneggiare l‟unità di governo o degradare la qualità
del segnale acquisito, occorre utilizzare degli isolatori galvanici per interrompere la continuità
elettrica tra la parte operativa (sensori ed attuatori) e l‟unità di governo.
L‟isolamento è realizzato in modo diverso per i diversi tipi di segnali.
Per i segnali analogici in alternata si può usare un trasformatore di isolamento,
Per i segnali analogici a bassa frequenza occorre uno speciale amplificatore di isolamento.
Per i segnali logici, non essendo richieste caratteristiche di linearità, viene solitamente sfruttato
l‟accoppiamento optoelettronico tra due fotodiodi o tra un foto-diodo e un foto-transistore.
Amplificatore di isolamento
Un amplificatore di isolamento è un dispositivo la cui funzione primaria consiste nel fornire un
isolamento galvanico tra lo stadio di ingresso e quello di uscita.
Un amplificatore di isolamento è solitamente costituito da uno stadio amplificatore di ingresso (con
amplificatore operazionale o di strumentazione) e da uno stadio di isolamento a guadagno unitario.
La barriera di isolamento può essere realizzata secondo diverse modalità di accoppiamento:
Capacitivo
Optoelettronico
Trasformatorico
Amplificatore di isolamento
Trasmissione dei segnali analogici
Quando i sensori sono posti a distanze relativamente elevate dal sistema di campionamento i segnali
elettrici in tensione sono convertiti in segnali di corrente nell‟intervallo 4÷20 mA.
Questo metodo di
trasmissione detto Loop di Corrente, presenta i seguenti vantaggi:
Possibilità di diagnosticare guasti o interruzioni, in quanto essendo stabilito il livello minimo a 4
mA, un segnale nullo viene identificato come rivelatore di un guasto.
Maggiore insensibilità al rumore, in quanto i disturbi di tensione lungo le linee di trasmissione
vengono attenuati dal regolatore di corrente.
Possibilità di trasmettere ad una distanza maggiore a parità di accuratezza richiesta.
Quando le distanze di trasmissione non sono molto grandi si utilizzano segnali di tensione di 0 ÷5 V, 0
÷ 10 V e ±10 V per i segnali analogici e 0 ÷ 24 V per i segnali logici.
Multiplazione del segnale
Nei processi industriali in cui sono presenti decine di sensori, non è economico riservare a ciascun
segnale un sistema di acquisizione (amplificazione, conversione analogica/digitale) dedicato. In tal
caso lo schema di acquisizione prevede uno stadio di multiplazione dei segnali in ingresso in un unico
canale di acquisizione, implementato mediante particolari dispositivi denominati multiplexer.
Un multiplexer consente di commutare n canali analogici in ingresso in un unico canale analogico di
uscita. La commutazione viene comandata da un segnale digitale che codifica il canale di ingresso da
selezionare.
Un
segnale
logico
di
Enable
consente
di
disattivare
tutti
contemporaneamente, ottenendo una disconnessione completa del canale di uscita.
gli
interruttori
Multiplazione del segnale
Il multiplexer analogico presenta un comportamento dinamico rilevante, in quanto durante le
commutazione tra due canali, che generalmente si trovano a differenti potenziali, le capacità parassite
associate al componente, al trasduttore connesso al canale attivo ed al carico (in generale un
amplificatore) producono dei ritardi temporali nell‟assestamento del segnale.
Per tenere conto di questi effetti il costruttore del componente dichiara un tempo di assestamento
(settling time) che corrisponde al tempo necessario affinché il segnale si assesti all‟interno di una
fascia centrata attorno al valore di regime. L‟ampiezza della fascia di assestamento èmisurata in
percento del valore di regime.
Campionatura e tenuta (sample and hold).
Un dispositivo Sample and Hold (S/H) serve a mantenere ad un valore fisso il segnale analogico da
convertire, e quindi evitare variazioni durante il processo di conversione.
Dal punto di vista logico il S/H ha due stati di funzionamento:
Lo stato di “sample” o “tracking”, in cui il segnale analogico che si presenta in ingresso al
componente viene riportato all‟uscita, in genere con guadagno unitario.
Lo stato di “hold”, in cui il segnale analogico di ingresso al componente in un certo
istante,viene mantenuto costante all‟uscita.
Convertitore analogico digitale (ADC)
Il convertitore analogico-digitale, o ADC, riceve in ingresso un segnale analogico continuo e
restituisce un segnale digitale codificato proporzionale al segnale di ingresso.
I principi di conversione più utilizzati sono:
ADC ad approssimazioni successive.
ADC a conversione parallela (“flash-converter”).
ADC ad approssimazioni successive
Il convertitore ad approssimazioni successive è basato su di un procedimento iterativo a successive
approssimazioni generate tramite un procedimento di prova-ed-errore basato sul confronto
dell‟ingresso da convertire con l‟uscita di un DAC (Digtal to Analog Converter).
Un DAC traduce una parola binaria x ad N bit in una tensione Vo, secondo una proporzione
equivalente al rapporto tra una grandezza analogica di riferimento Vs (il fondo scala analogico) e il
massimo valore binario rappresentabile 2N (fondo scala digitale).
ADC ad approssimazioni successive
Un DAC è costituito in linea di principio da una rete resistiva a struttura variabile formata da
resistenze di valore R, 2R, 4R, . . . , 2N-1R, dove N è il numero di bit del convertitore. Ogni resistenza è
connessa ad un interruttore, chiuso o aperto a seconda del valore logico assunto dal bit
corrispondente.
La somma delle correnti che attraversano le varie resistenze dipende dal valore binario associato ad
ogni bit, e dal valore della corrispondente resistenza. Tale corrente viene convertita nella tensione
d‟uscita Vo attraverso un amplificatore operazionale retroazionato, che opera da convertitore
corrente/tensione. La tensione Vo varia tra 0, che si ottiene con [BN-1=0,. . . ,B0=0] a Vs(1-1/2N) che
discende dalla configurazione [BN-1=1,. . . ,B 0=1].
ADC ad approssimazioni successive
Lo schema di principio del DAC non è mai usato a causa di problemi legati alla grande variabilità dei
valori delle resistenze della rete di resistenze. Si verificano infatti comportamenti dinamici diversi nei
vari rami e derive termiche differenti dei componenti. I pratica, lo schema di un DAC comprende solo
valori di resistenza R e 2R.
La corrente d‟uscita del convertitore Iout corrisponde alla somma delle correnti che scorrono nelle
varie resistenze secondo la relazione:
ADC ad approssimazioni successive
La conversione per approssimazioni successive richiede un certo tempo per essere eseguita,
principalmente perché ad ogni passo vi è una conversione digitale-analogica da eseguire, con
conseguenti ritardi temporali. In genere, inoltre, il tempo di conversione dipende dal numero di bit del
convertitore.
Per poter sincronizzare l‟esecuzione della conversione con i dispositivi a monte dell‟ADC (multiplexer
analogico, sample and hold) e con il microprocessore, l‟ADC possiede anche un ingresso logico per
un segnale di Start Conversion (SC, inizio della conversione) ed un‟uscita logica per un segnale di
uscita End Of Cconversion (EOC, fine della conversione).
Data la presenza di circuiti logici di comando, il convertitore necessita in genere anche di un segnale
di clock.
ADC a conversione parallela
Il convertitore parallelo, mediante opportuni comparatori a soglia, distingue 2N - 1 diversi livelli di
tensione, ognuno dei quali corrisponde ad una configurazione binaria di uscita.
La differenza tra due livelli di tensioni consecutivi, pari alla risoluzione del convertitore, corrisponde
ad un LSB.
ADC a conversione parallela
I livelli di tensione sono realizzati utilizzando una tensione di riferimento Vs connessa ad una serie di
resistori di opportuno valore.
Il convertitore parallelo è molto più veloce del convertitore ad approssimazioni successive, in quanto
la conversione avviene in un unico passaggio (in parallelo).
Lo svantaggio principale di questi convertitori consiste nella complessità e nel costo del dispositivo.
Infatti per rilevare ogni livello di tensione occorre un comparatore, per cui in un convertitore a N bit
occorrono 2N - 1 comparatori, ed inoltre occorre generare 2N -1 tensioni di riferimento in modo stabile
ed accurato.
Dal punto di vista pratico questi dispositivi hanno una risoluzione bassa (8 bit al massimo).