SINAMICS S110 / S120
Motori sincroni 1FK7, generazione 2
Manuale di progettazione · 10/2011
SINAMICS
s
Motori sincroni 1FK7,
___________________
Premessa
1
___________________
Descrizione dei motori
SINAMICS S110 / S120
Motori sincroni 1FK7,
generazione 2
Manuale di progettazione
2
___________________
Progettazione
Caratteristiche meccaniche
3
___________________
dei motori
Dati tecnici e curve
4
___________________
caratteristiche
5
___________________
Componenti del motore
6
___________________
Tecnica di collegamento
Avvertenze sull'uso dei
7
___________________
motori
A
___________________
Appendice
Edizione 10/2011
6SN1197-0AD16-0CP4
Avvertenze di legge
Avvertenze di legge
Concetto di segnaletica di avvertimento
Questo manuale contiene delle norme di sicurezza che devono essere rispettate per salvaguardare l'incolumità
personale e per evitare danni materiali. Le indicazioni da rispettare per garantire la sicurezza personale sono
evidenziate da un simbolo a forma di triangolo mentre quelle per evitare danni materiali non sono precedute dal
triangolo. Gli avvisi di pericolo sono rappresentati come segue e segnalano in ordine descrescente i diversi livelli
di rischio.
PERICOLO
questo simbolo indica che la mancata osservanza delle opportune misure di sicurezza provoca la morte o gravi
lesioni fisiche.
AVVERTENZA
il simbolo indica che la mancata osservanza delle relative misure di sicurezza può causare la morte o gravi
lesioni fisiche.
CAUTELA
con il triangolo di pericolo indica che la mancata osservanza delle relative misure di sicurezza può causare
lesioni fisiche non gravi.
CAUTELA
senza triangolo di pericolo indica che la mancata osservanza delle relative misure di sicurezza può causare
danni materiali.
ATTENZIONE
indica che, se non vengono rispettate le relative misure di sicurezza, possono subentrare condizioni o
conseguenze indesiderate.
Nel caso in cui ci siano più livelli di rischio l'avviso di pericolo segnala sempre quello più elevato. Se in un avviso
di pericolo si richiama l'attenzione con il triangolo sul rischio di lesioni alle persone, può anche essere
contemporaneamente segnalato il rischio di possibili danni materiali.
Personale qualificato
Il prodotto/sistema oggetto di questa documentazione può essere adoperato solo da personale qualificato per il
rispettivo compito assegnato nel rispetto della documentazione relativa al compito, specialmente delle avvertenze
di sicurezza e delle precauzioni in essa contenute. Il personale qualificato, in virtù della sua formazione ed
esperienza, è in grado di riconoscere i rischi legati all'impiego di questi prodotti/sistemi e di evitare possibili
pericoli.
Uso conforme alle prescrizioni di prodotti Siemens
Si prega di tener presente quanto segue:
AVVERTENZA
I prodotti Siemens devono essere utilizzati solo per i casi d’impiego previsti nel catalogo e nella rispettiva
documentazione tecnica. Qualora vengano impiegati prodotti o componenti di terzi, questi devono essere
consigliati oppure approvati da Siemens. Il funzionamento corretto e sicuro dei prodotti presuppone un trasporto,
un magazzinaggio, un’installazione, un montaggio, una messa in servizio, un utilizzo e una manutenzione
appropriati e a regola d’arte. Devono essere rispettate le condizioni ambientali consentite. Devono essere
osservate le avvertenze contenute nella rispettiva documentazione.
Marchio di prodotto
Tutti i nomi di prodotto contrassegnati con ® sono marchi registrati della Siemens AG. Gli altri nomi di prodotto
citati in questo manuale possono essere dei marchi il cui utilizzo da parte di terzi per i propri scopi può violare i
diritti dei proprietari.
Esclusione di responsabilità
Abbiamo controllato che il contenuto di questa documentazione corrisponda all'hardware e al software descritti.
Non potendo comunque escludere eventuali differenze, non possiamo garantire una concordanza perfetta. Il
contenuto di questa documentazione viene tuttavia verificato periodicamente e le eventuali correzioni o modifiche
vengono inserite nelle successive edizioni.
Siemens AG
Industry Sector
Postfach 48 48
90026 NÜRNBERG
GERMANIA
N. di ordinazione documentazione: 6SN1197-0AD16-0CP4
Ⓟ 11/2011
Copyright © Siemens AG 2004.
Con riserva di eventuali modifiche tecniche
Premessa
Documentazione sui motori
La documentazione sui motori è suddivisa nelle seguenti categorie:
● Documentazione generale, ad es. Cataloghi
● Documentazione per il costruttore/per il service, ad es. Istruzioni operative e Manuali di
progettazione
Ulteriori informazioni
Il link indicato permette di accedere a informazioni sui seguenti temi:
● Ordinazione della documentazione / elenco delle pubblicazioni
● Altri link per il download dei documenti
● Uso della documentazione online (ricerca e consultazione di manuali e informazioni)
http://www.siemens.com/motioncontrol/docu
Per domande relative alla documentazione tecnica (ad es. suggerimenti, correzioni) si prega
di inviare una e-mail al seguente indirizzo:
[email protected]
My Documentation Manager
Il seguente link fornisce informazioni su come organizzare la documentazione in base ai
contenuti Siemens e integrarla nella propria documentazione della macchina:
http://www.siemens.com/mdm
Training
Questo link fornisce informazioni relative a SITRAIN, il programma di formazione di Siemens
per i prodotti, i sistemi e le soluzioni della tecnica di automazione:
http://siemens.com/sitrain
Indirizzi Internet per la tecnica di azionamento
Sito Internet per i motori: http://www.siemens.com/motors
Indirizzo Internet per i prodotti: http://www.siemens.com/motioncontrol
Indirizzo Internet per SINAMICS: http://www.siemens.com/sinamics
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
3
Premessa
Destinatari
La presente documentazione è destinata a pianificatori e progettisti, nonché a costruttori di
macchine e addetti alla messa in servizio.
Vantaggi
Il Manuale di progettazione è di supporto nella scelta dei motori, nel calcolo dei componenti
dell'azionamento, nella scelta degli accessori necessari e delle opzioni di potenza della rete
e del motore.
Configurazione standard
L'insieme delle funzionalità descritte nella presente documentazione può discostarsi dalle
funzionalità presenti nel sistema fornito.
● Il sistema di azionamento può contenere altre funzioni oltre a quelle descritte nella
presente documentazione. Ciò non costituisce però obbligo di implementazione di tali
funzioni in caso di nuove forniture o di assistenza tecnica.
● Nella documentazione possono essere descritte funzioni che non sono disponibili in una
determinata variante del sistema di azionamento. Le funzionalità dell'azionamento fornito
si possono ricavare unicamente dalla documentazione per l'ordinazione.
● Eventuali integrazioni o le modifiche apportate dal costruttore della macchina vengono
documentate dello stesso.
Analogamente, per motivi di chiarezza, anche la presente documentazione non contiene
tutte le informazioni dettagliate per tutti i tipi di prodotto. La documentazione non può altresì
tenere conto di tutti i casi possibili di installazione, funzionamento e manutenzione.
Supporto tecnico
Per i numeri telefonici dell'assistenza tecnica specifica dei vari paesi, vedere in Internet:
http://www.siemens.com/automation/service&support
Dichiarazione di conformità CE
La dichiarazione di conformità CE relativa alla direttiva sulla bassa tensione è disponibile in
Internet all'indirizzo: http://support.automation.siemens.com
Immettere come criterio di ricerca il numero 32732072 oppure rivolgersi alla filiale Siemens
più vicina.
Motori sincroni 1FK7, generazione 2
4
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Premessa
Avvertenze di pericolo
PERICOLO
La messa in servizio non è consentita fino a quando non è stato accertato che la macchina
sulla quale devono essere installati i componenti descritti nel presente manuale è conforme
alle disposizioni della direttiva macchine CE.
La messa in servizio delle apparecchiature SINAMICS e dei motori può essere eseguita
solo da personale adeguatamente qualificato.
Il personale qualificato dovrà osservare la documentazione tecnica del cliente relativa al
prodotto, nonché conoscere a fondo e rispettare le relative indicazioni di pericolo e di
avvertimento.
Quando un'apparecchiatura elettrica o un motore sono in funzione, i circuiti elettrici sono
sottoposti a tensioni pericolose. Tutti i lavori sull'impianto elettrico devono avvenire in
assenza di tensione.
Durante il funzionamento dell'impianto sono possibili movimenti pericolosi degli assi.
Il collegamento di apparecchi SINAMICS con motori alla rete di alimentazione tramite
dispositivi di protezione (RCD) per le dispersioni di corrente (FI) è ammesso solo se la
compatibilità delle apparecchiature con il dispositivo di protezione FI è comprovata secondo
la norma EN 61800-5-1.
I motori sono omologati congiuntamente al sistema di azionamento per operare su reti TN e
TT con centro stella messo a terra, nonché su reti IT.
Nel funzionamento su reti IT la comparsa di un primo errore tra una parte attiva e la terra
deve essere segnalata da un dispositivo di monitoraggio. La norma IEC 60364-4-41
raccomanda di eliminare al più presto il primo errore.
Nelle reti con conduttore esterno messo a terra occorre inserire un trasformatore di
isolamento con centro stella messo a terra (lato secondario) tra rete e sistema di
azionamento, in modo da evitare sollecitazioni non ammesse dell'isolamento del motore.
Dal momento che prevalgono le reti TT con conduttore di linea messo a terra, è necessario
impiegare un trasformatore di isolamento.
AVVERTENZA
Per un funzionamento ottimale e sicuro di queste apparecchiature e dei motori è essenziale
che il trasporto sia corretto e che l'immagazzinaggio, l'installazione e il montaggio siano
stati eseguiti con la cura necessaria.
Per l'esecuzione di varianti speciali per le apparecchiature e i motori è necessario fare
riferimento alle indicazioni riportate nei cataloghi e nelle offerte.
Oltre alle indicazioni di pericolo e di avvertimento contenute nella documentazione tecnica
del cliente fornita, vanno tenute presenti anche le normative nazionali, locali e le
prescrizioni relative all'impianto.
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
5
Premessa
CAUTELA
La temperatura sulla superficie esterna dei motori può superare +100 °C.
Per questo motivo non devono trovarsi nelle immediate vicinanze del motore, o essere
fissati allo stesso, componenti termosensibili quali p. es. cavi o componenti elettronici.
Si deve fare assolutamente evitare che in fase di montaggio i cavi di collegamento
– vengano danneggiati
– siano tirati
– si possano impigliare in parti in rotazione.
CAUTELA
Il collegamento dei motori va eseguito sulla base delle istruzioni operative. Non è
consentito il collegamento diretto dei motori alla rete in corrente alternata perchè questo
potrebbe distruggere i motori.
Le apparecchiature SINAMICS e i motori, durante la prova individuale, vengono sottoposti
ad una prova dielettrica. Non è consentito effettuare sul motore un test aggiuntivo ad alta
tensione; questo test potrebbe infatti distruggere componenti elettronici come i sensori di
temperatura o gli encoder.
CAUTELA
I motori con interfaccia DRIVE-CLiQ possiedono una targhetta elettronica che riporta i dati
specifici del motore e dell'encoder. Per questo motivo i moduli encoder con interfaccia
DRIVE-CLiQ o i Sensor Module montati possono funzionare solo sul motore d'origine e non
devono essere montati su altri motori o sostituiti con Sensor Module di altri motori.
L'interfaccia DRIVE-CLiQ è a diretto contatto con componenti sensibili alle cariche
elettrostatiche (ESD). I collegamenti non devono venire a contatto con le mani o con
utensili che siano caricati elettrostaticamente.
Nota
Le apparecchiature SINAMICS con motori in condizioni adeguate di esercizio e in ambienti
operativi asciutti soddisfano la Direttiva Bassa Tensione.
Le apparecchiature SINAMICS con motori soddisfano la Direttiva EMC per le configurazioni
indicate nella relativa dichiarazione di conformità CE.
Motori sincroni 1FK7, generazione 2
6
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Premessa
Avvertenze ESD e campi elettromagnetici
CAUTELA
Elecrostatic Sensitive Devices (ESD) sono componenti singoli, circuiti integrati o schede
che possono essere danneggiati da campi o scariche elettrostatiche.
Manipolazione - prescrizioni per i componenti ESD:
Lavorando con componenti elettronici è indispensabile provvedere ad una buona messa a
terra della persona, della stazione di lavoro e dell'imballaggio!
I componenti elettronici devono essere manipolati solo in aree ESD con pavimentazione
dotata di ottima conducibilità se il personale
– indossa l'apposito bracciale ESD messo a terra e
– porta scarpe ESD o gli appositi nastri ESD per la messa a terra delle scarpe.
Il contatto con componenti elettronici va comunque evitato se non strettamente
indispensabile.
I componenti elettronici non devono venire a contatto con elementi in plastica e indumenti
con parti in plastica.
Le schede elettroniche possono essere depositate solo su ripiani dotati di ottima
conducibilità (tavoli con rivestimento ESD, gommapiuma ESD con ottima conducibilità,
buste ESD per l'imballo, contenitori ESD per il trasporto).
Le schede elettroniche non devono essere collocate nelle vicinanze di videoterminali,
monitor o televisori. Distanza dallo schermo > 10 cm).
Sulle schede elettroniche si possono eseguire misure se
– l'apparecchio di misura è messo a terra (p. es. tramite apposito conduttore di terra)
oppure
– prima della misura, nel caso di apparecchi di misura non messi a terra, il puntale di
misura viene messo per breve tempo a terra
(p. es. toccando una parte non verniciata della custodia dell'apparecchiatura di comando).
PERICOLO
I campi elettrici, magnetici ed elettromagnetici che si manifestano in condizioni di esercizio
nelle immediate vicinanze del prodotto possono essere pericolosi per portatori di
pacemaker, impianti o simili.
Gli addetti alla macchina o all'impianto e le persone che vengono a trovarsi in prossimità
del prodotto devono rispettare le norme e le direttive pertinenti! Nello spazio economico
europeo si tratta in particolare della direttiva CEM 2004/40/CE, norme EN 12198-1 ...
12198-3, mentre nella Repubblica Federale Tedesca vigono le norme antinfortunistiche
dell'associazione professionale BGV 11 con il relativo regolamento BGR 11 "Campi
elettromagnetici".
Inoltre si deve effettuare un'analisi dei rischi di ogni posto di lavoro, stilare e applicare le
misure cautelari per ridurre i pericoli e i rischi per le persone, nonché definire e rispettare le
aree a rischio di esplosione e quelle pericolose.
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
7
Premessa
Avvertenza sui prodotti di terze parti
ATTENZIONE
Questo stampato contiene raccomandazioni su prodotti di terze parti. Si tratta di prodotti di
altri fornitori, di cui conosciamo l'idoneità di massima. Naturalmente si possono utilizzare
prodotti di ulteriori fornitori con caratteristiche analoghe. Le nostre indicazioni devono
essere intese come informazione e non come prescrizione. Siemens non si assume alcuna
responsabilità per la qualità dei prodotti di terze parti.
Compatibilità ambientale
● Aspetti ambientali nello sviluppo
Nella scelta dei componenti di fornitori esterni la compatibilità ambientale è stata un
criterio essenziale.
Particolare importanza è stata attribuita alla riduzione del volume, della massa e della
varietà di tipi di parti metalliche e in plastica.
Può essere esclusa una compromissione dell'impregnazione della vernice (test)
● Aspetti ambientali nella produzione
Il trasporto dei componenti di fornitori esterni e dei prodotti avviene prevalentemente in
imballi riutilizzabili. Non è necessario prevedere trasporti per merci pericolose.
Il materiale di imballaggio è costituito principalmente da cartonaggi conformi alla direttiva
sugli imballaggi 94/62/CE.
Il consumo energetico nella fase di produzione è stato ottimizzato.
La produzione è esente da emissioni.
● Aspetti ambientali nello smaltimento
Lo smaltimento dei motori deve avvenire nel rispetto delle prescrizioni nazionali e locali
relative al normale processo di materiali oppure restituendoli al costruttore.
Durante lo smaltimento occorre osservare quanto segue:
Trattare l'olio secondo la normativa sugli olii esausti (ad es. olio per trasmissione per
accoppiamento riduttori)
Non miscelare con solvente, detergenti a freddo o residui di vernice
Separare i componenti per il riciclaggio in base a:
– rottami elettronici (ad es. elettronica del trasduttore, moduli sensori)
– rottame ferroso
– alluminio
– metalli verniciati (ruote di ingranaggi, avvolgimenti di motori)
Motori sincroni 1FK7, generazione 2
8
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Premessa
Rischi residui di Power Drive System
Nell'ambito della valutazione dei rischi della macchina, da eseguire conformemente alla
direttiva macchine CE, il costruttore della macchina deve considerare i seguenti rischi residui
derivanti dai componenti per il controllo e l'azionamento di un Power Drive System (PDS).
1. Movimenti indesiderati di parti della macchina motorizzate durante la messa in servizio, il
funzionamento, la manutenzione e la riparazione, dovuti ad esempio a
– Errori hardware e/o software nei sensori, nel controllo, negli attuatori e nella tecnica di
collegamento
– Tempi di reazione del controllo e dell'azionamento
– Funzionamento e/o condizioni ambientali esterni alla specifica
– Errori durante la parametrizzazione, la programmazione, il cablaggio e il montaggio
– Utilizzo di apparecchiature radio / telefoni cellulari nelle immediate vicinanze del
controllo
– Influenze esterne / danneggiamenti.
2. Temperature eccezionali nonché emissioni di luce, rumori, particelle e gas, dovuti ad
esempio a
– Guasto a componenti
– Errore software
– Funzionamento e/o condizioni ambientali esterni alla specifica
– Influenze esterne / danneggiamenti.
3. Tensioni di contatto pericolose, ad esempio dovute a
– Guasto a componenti
– Influenza in caso di cariche elettrostatiche
– Induzione di tensioni con motori in movimento
– Funzionamento e/o condizioni ambientali esterni alla specifica
– Condensa / imbrattamenti conduttivi
– Influenze esterne / danneggiamenti
4. Campi elettrici, magnetici ed elettromagnetici in condizioni di esercizio che ad es.
possono essere pericolosi per portatori di pacemaker, impianti od oggetti metallici in caso
di distanza insufficiente.
5. Rilascio di sostanze ed emissioni dannose per l'ambiente in caso di utilizzo non
appropriato e/o smaltimento non corretto dei componenti.
Per ulteriori informazioni sui rischi residui derivanti dai componenti del PDS, consultare la
Documentazione tecnica per l'utente ai capitoli relativi.
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
9
Premessa
Motori sincroni 1FK7, generazione 2
10
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Indice del contenuto
Premessa .................................................................................................................................................. 3
1
Descrizione dei motori ............................................................................................................................. 15
1.1
Caratteristiche ..............................................................................................................................15
1.2
Panoramica delle coppie..............................................................................................................17
1.3
Caratteristiche tecniche ...............................................................................................................18
1.4
Dati di selezione e ordinazione 1FK7 per tensione del circuito intermedio 510 V ... 720 V
DC (rete 3 AC 380 V - 480 V) ......................................................................................................20
1FK701/1FK702 Compact ...........................................................................................................20
1FK703 - 1FK710 Compact .........................................................................................................21
1FK7 High Dynamic/1FK7 High Inertia........................................................................................23
1.4.1
1.4.2
1.4.3
1.5.1
1.5.2
Dati di selezione e ordinazione 1FK7 per tensione del circuito intermedio 270 V ... 330 V
DC (rete 1 AC 200 V - 240 V) ......................................................................................................24
1FK701/1FK702 Compact ...........................................................................................................24
1FK703/1FK704 Compact e 1FK703/1FK704 High Dynamic .....................................................25
1.6
Indicazioni sulla targhetta dei dati tecnici (targhetta identificativa)..............................................26
1.7
Panoramica dei motori/assegnazione dei Motor Module.............................................................27
1.5
2
3
Progettazione .......................................................................................................................................... 35
2.1
2.1.1
2.1.2
2.1.3
Software di progettazione ............................................................................................................35
Tool di progettazione SIZER for SIEMENS Drives ......................................................................35
Software di azionamento/di messa in servizio STARTER...........................................................37
Tool di messa in servizio SinuCom..............................................................................................38
2.2
2.2.1
2.2.2
2.2.3
Procedura di progettazione..........................................................................................................38
1. Chiarimenti sul tipo di azionamento.........................................................................................39
2. Definizione delle condizioni al contorno e integrazione nell'automazione...............................40
3. Definizione del carico, calcolo della coppia max. di carico e definizione del motore ..............40
Caratteristiche meccaniche dei motori ..................................................................................................... 47
3.1
Raffreddamento ...........................................................................................................................47
3.2
Grado di protezione .....................................................................................................................47
3.3
Esecuzione dei cuscinetti.............................................................................................................49
3.4
3.4.1
3.4.2
3.4.3
3.4.4
Forze radiali e forze assiali ..........................................................................................................49
Calcolo della forza di tensionamento delle cinghie......................................................................49
Sollecitazione per forze radiali .....................................................................................................50
Diagrammi delle forze radiali .......................................................................................................50
Sollecitazione assiale...................................................................................................................54
3.5
Concentricità, coassialità e planarità ...........................................................................................55
3.6
Estremità dell'albero.....................................................................................................................56
3.7
Equilibratura .................................................................................................................................56
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
11
Indice del contenuto
4
5
6
3.8
Grado di vibrazione ..................................................................................................................... 57
3.9
Emissione di rumori..................................................................................................................... 57
3.10
Verniciatura ................................................................................................................................. 58
Dati tecnici e curve caratteristiche ........................................................................................................... 59
4.1
Range operativo e caratteristica ................................................................................................. 59
4.2
4.2.1
4.2.1.1
4.2.1.2
4.2.1.3
4.2.2
4.2.2.1
Curve caratteristiche velocità/coppia .......................................................................................... 68
Motori 1FK7 su SINAMICS S110 / S120 con tensione di rete 3 AC 380 V ... 480 V.................. 68
1FK7 Compact ............................................................................................................................ 68
1FK7 High Dynamic .................................................................................................................. 140
1FK7 High Inertia ...................................................................................................................... 168
Motori 1FK7 su SINAMICS S110 / S120 POWER MODULE con tensione di rete 1 AC
200 V ... 240 V .......................................................................................................................... 180
1FK7 Compact e 1FK7 High Dynamic ...................................................................................... 180
4.3
4.3.1
Disegni quotati .......................................................................................................................... 196
Motori 1FK7............................................................................................................................... 198
Componenti del motore ......................................................................................................................... 207
5.1
Protezione termica del motore .................................................................................................. 207
5.2
5.2.1
5.2.2
5.2.3
5.2.4
5.2.5
5.2.6
Encoder (Opzione) .................................................................................................................... 208
Selezione encoder .................................................................................................................... 208
Collegamento encoder per motori con interfaccia DRIVE-CLiQ............................................... 210
Collegamento encoder per motori senza interfaccia DRIVE-CLiQ ........................................... 210
Encoder incrementale ............................................................................................................... 210
Encoder assoluto ...................................................................................................................... 212
Resolver .................................................................................................................................... 214
5.3
5.3.1
5.3.2
5.3.3
5.3.4
5.3.5
Freno di stazionamento (opzione) ............................................................................................ 216
Proprietà.................................................................................................................................... 216
Freni a magneti permanenti ...................................................................................................... 217
Collegamento diretto del freno di stazionamento agli apparecchi SINAMICS.......................... 217
Collegamento del freno di stazionamento ad alimentatore esterno tramite contattore ............ 217
Dati tecnici del freno di stazionamento ..................................................................................... 219
5.4
5.4.1
Resistenze di frenatura (funzione di frenatura mediante cortocircuito dell'armatura) .............. 220
Dimensionamento delle resistenze di frenatura........................................................................ 223
5.5
5.5.1
5.5.2
5.5.2.1
5.5.2.2
5.5.2.3
5.5.2.4
Riduttore.................................................................................................................................... 226
Dimensionamento dei riduttori .................................................................................................. 226
Motori con riduttore planetario .................................................................................................. 229
Caratteristiche della serie costruttiva SP+ ................................................................................ 229
Dati per la scelta e l'ordinazione della serie costruttiva SP+ .................................................... 231
Caratteristiche della serie costruttiva LP+ ................................................................................ 236
Dati per la scelta e l'ordinazione della serie costruttiva LP+..................................................... 238
5.6
Giunto di accoppiamento .......................................................................................................... 239
Tecnica di collegamento ........................................................................................................................ 241
6.1
Periferia di azionamento SINAMICS......................................................................................... 241
6.2
Collegamento della potenza...................................................................................................... 241
6.3
Collegamento del segnale......................................................................................................... 244
Motori sincroni 1FK7, generazione 2
12
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Indice del contenuto
7
A
6.4
Bloccaggio rapido ......................................................................................................................249
6.5
Capacità torsionale dei connettori sul motore............................................................................249
Avvertenze sull'uso dei motori ............................................................................................................... 253
7.1
Trasporto / immagazzinaggio nel periodo precedente all'utilizzo ..............................................253
7.2
Condizioni ambientali.................................................................................................................253
7.3
Posa dei cavi in ambienti umidi..................................................................................................254
7.4
Forme costruttive .......................................................................................................................255
7.5
Condizioni di montaggio.............................................................................................................256
7.6
Sollecitazione da vibrazioni........................................................................................................257
7.7
Forme di rete consentite ............................................................................................................258
Appendice.............................................................................................................................................. 259
A.1
Definizione dei concetti ..............................................................................................................259
A.2
Dichiarazione di conformità........................................................................................................264
Indice analitico....................................................................................................................................... 265
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
13
Indice del contenuto
Motori sincroni 1FK7, generazione 2
14
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Descrizione dei motori
1.1
1
Caratteristiche
Panoramica
I motori 1FK7 sono motori sincroni compatti con eccitazione a magneti permanenti. Con le
opzioni disponibili, i riduttori, i trasduttori e con lo spettro ampliato, i motori 1FK7 possono
essere adattati in modo ottimale a qualsiasi impiego. Essi soddisfano pertanto anche le
esigenze crescenti delle più recenti generazioni di macchine.
Insieme al sistema di azionamento SINAMICS S110 / S120 i motori 1FK7 costituiscono un
potente sistema di elevata funzionalità. I trasduttori integrati per la regolazione di velocità e
posizione possono essere scelti in funzione dell'applicazione.
I motori sono dimensionati per il funzionamento senza ventilazione forzata; essi dissipano il
calore generato attraverso la superficie esterna. I motori 1FK7 sono caratterizzati da una
elevata sovraccaricabilità.
Figura 1-1
Motori 1FK7
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
15
Descrizione dei motori
1.1 Caratteristiche
Vantaggi
I motori 1FK7 Compact offrono:
● Montaggio ad ingombro ridotto grazie all'elevata densità di potenza
● Utilizzabili universalmente per diverse applicazioni
● Ampio spettro di motori
I motori 1FK7 High Dynamic offrono:
● Una dinamica estremamente elevata grazie al basso momento d'inerzia del rotore
I motori 1FK7 High Inertia offrono:
● Caratteristiche di regolazione "robuste" con inerzia del carico elevata o variabile
● Ridotto onere di ottimizzazione e messa in servizio per la compensazione delle
grandezze di disturbo
Campo di impiego
● macchine utensili
● Robot e sistemi di manipolazione
● lavorazione di legno, vetro, ceramica e marmo
● macchine per imballaggio, per lavorazione della plastica e tessili
● assi ausiliari
Motori sincroni 1FK7, generazione 2
16
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Descrizione dei motori
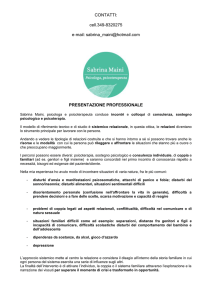
1.2 Panoramica delle coppie
1.2
Panoramica delle coppie
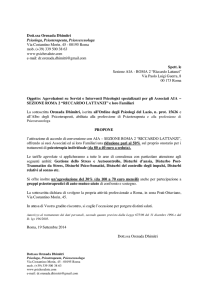
1FK7 Compact
1P
).
).
1P
).
1P
).
1P
1P
).
).
1P
).
1P
0.>1P@
Figura 1-2
Coppie di arresto 1FK7 Compact
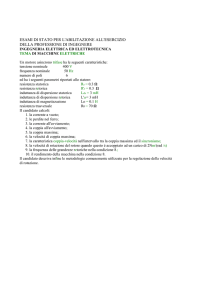
1FK7 High Dynamic
).
1P
).
1P
).
1P
).
1P
0.>1P@
Figura 1-3
Coppie di arresto 1FK7 High Dynamic
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
17
Descrizione dei motori
1.3 Caratteristiche tecniche
1FK7 High Inertia
1P
).
1P
).
1P
).
0.>1P@
Figura 1-4
1.3
Tabella 1- 1
Coppie di arresto 1FK7 High Inertia
Caratteristiche tecniche
Caratteristiche tecniche
Tipo di motore
Motore sincrono con eccitazione a magneti permanenti
Materiale magnetico
Materiale magnetico a terre rare
Raffreddamento
Raffreddamento naturale
Isolamento dell'avvolgimento statorico secondo
EN 60034-1 (IEC 60034-1)
Classe termica 155 (F) per una sovratemperatura
dell'avvolgimento ΔT = 100 K con temperatura ambiente +40 °C
Altitudine d'installazione (secondo EN 60034-1 e IEC
60034–1)
≤ 1000 m s.l.m., per altitudini più elevate riduzione di potenza
Forma costruttiva secondo EN 60034-7 (IEC 600347)
IM B5 (IM V1, IM V3)
Grado di protezione secondo EN 60034-5
(IEC 60034-5) 1)
IP64; in opzione IP65 o IP65 + IP67 all'uscita dell'albero
Controllo della temperatura
Sensore di temperatura KTY 84 nell'avvolgimento statorico
Verniciatura
antracite (RAL 7016)
Estremità dell'albero lato DE secondo DIN 748-3
(IEC 60072-1)
Albero liscio, in opzione albero con chiavetta e gola (equilibratura
con mezza chiavetta)
Concentricità, coassialità e planarità secondo
DIN 42955 (IEC 60072–1) 2)
Tolleranza N (normale)
Gradi di vibrazione secondo EN 60034-14
(IEC 60034-14)
Il livello A viene mantenuto fino alla velocità di rotazione nominale
Livello di pressione acustica LpA (1 m) secondo DIN
EN ISO 1680, max. tolleranza + 3 dB
1FK701⃞ ... 1FK704⃞: 55 dB (A)
1FK706⃞: 65 dB (A)
1FK708⃞ ... 1FK710⃞: 70 dB (A)
Motori sincroni 1FK7, generazione 2
18
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Descrizione dei motori
1.3 Caratteristiche tecniche
Sistemi di trasduttori, integrati per motori senza
interfaccia DRIVE-CLiQ
Sistemi di trasduttori, integrati per motori con
interfaccia DRIVE-CLiQ
Encoder incrementale IC2048S/R, sen/cos 1 Vpp, 2048 S/R 3)
con traccia C e D, per AH 20 ... AH 100
Encoder assoluto AM2048S/R 2048 S/R 3), 4096 giri Multiturn,
con interfaccia EnDat per AH 36 ... AH 100
Encoder assoluto AM512S/R 512 S/R 3), 4096 giri Multiturn con
interfaccia EnDat, per AH 28
Encoder assoluto AM16S/R 16 S/R 3), 4096 giri Multiturn con
interfaccia EnDat, per AH 20 e AH 28
Resolver multipolare(il numero di coppie polari corrisponde al
numero di coppie polari del motore)
Resolver bipolare
Encoder assoluto AS24DQI Singleturn 24 bit, per AH 36 ... AH
100
Encoder assoluto AM24DQI 24 bit + 12 bit Multiturn, per AH 36
... AH 100
Encoder assoluto AS20DQI Singleturn 20 bit, per AH 36 ... AH
100
Encoder assoluto AM20DQI 20 bit + 12 bit Multiturn, per AH 36
... AH 100
Encoder incrementale IC22DQ 22 bit + posizione di
commutazione 11 bit, per AH 28
Encoder assoluto AM20DQ 20 bit + 12 bit Multiturn, per AH 28
Encoder assoluto AM15DQ 15 bit + 12 bit Multiturn, per AH 28
Resolver R15DQ 15 bit, non per AH 20
Resolver R14DQ 14 bit, non per AH 20
Collegamento
Connettori per segnali e potenza ruotabili
Freno di stazionamento
Freno di stazionamento montato in opzione (senza gioco, 24 V)
1)
1FK701 fornibile solo nel grado di protezione IP54 con verniciatura, non supporta i riduttori epicicloidali
2)
Regolarità di rotazione dell'estremità d'albero, coassialità dell'anello di centratura ed planarità della flangia di fissaggio
rispetto all'asse dell'estremità dell'albero.
3)
S/R = segnali/giro
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
19
Descrizione dei motori
1.4 Dati di selezione e ordinazione 1FK7 per tensione del circuito intermedio 510 V ... 720 V DC (rete 3 AC 380
V - 480 V)
1.4
Dati di selezione e ordinazione 1FK7 per tensione del circuito
intermedio 510 V ... 720 V DC (rete 3 AC 380 V - 480 V)
1.4.1
1FK701/1FK702 Compact
Motori sincroni 1FK7, generazione 2
20
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Descrizione dei motori
1.4 Dati di selezione e ordinazione 1FK7 per tensione del circuito intermedio 510 V ... 720 V DC (rete 3 AC 380 V - 480 V)
1.4.2
1FK703 - 1FK710 Compact
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
21
Descrizione dei motori
1.4 Dati di selezione e ordinazione 1FK7 per tensione del circuito intermedio 510 V ... 720 V DC (rete 3 AC 380
V - 480 V)
Motori sincroni 1FK7, generazione 2
22
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Descrizione dei motori
1.4 Dati di selezione e ordinazione 1FK7 per tensione del circuito intermedio 510 V ... 720 V DC (rete 3 AC 380 V - 480 V)
1.4.3
1FK7 High Dynamic/1FK7 High Inertia
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
23
Descrizione dei motori
1.5 Dati di selezione e ordinazione 1FK7 per tensione del circuito intermedio 270 V ... 330 V DC (rete 1 AC 200
V - 240 V)
1.5
Dati di selezione e ordinazione 1FK7 per tensione del circuito
intermedio 270 V ... 330 V DC (rete 1 AC 200 V - 240 V)
1.5.1
1FK701/1FK702 Compact
Motori sincroni 1FK7, generazione 2
24
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Descrizione dei motori
1.5 Dati di selezione e ordinazione 1FK7 per tensione del circuito intermedio 270 V ... 330 V DC (rete 1 AC 200 V - 240 V)
1.5.2
1FK703/1FK704 Compact e 1FK703/1FK704 High Dynamic
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
25
Descrizione dei motori
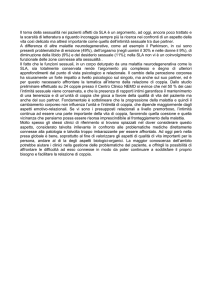
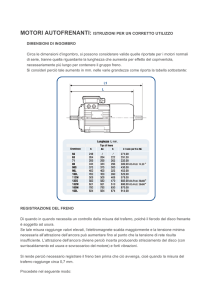
1.6 Indicazioni sulla targhetta dei dati tecnici (targhetta identificativa)
1.6
Indicazioni sulla targhetta dei dati tecnici (targhetta identificativa)
La targhetta dei dati tecnici (targhetta identificativa) riporta i dati tecnici validi per il motore
fornito. Con il motore viene fornita una seconda targhetta dei dati tecnici che può essere
utilizzata per scopi di documentazione.
a0RW
).$)&%
1R<)31
,
1P
$ Q PD[ PLQ
0
PLQ
$ Q 1
01
1P , 1
(QFRGHU$0'4,
8,1 9 ,3 PNJ
51
%UDNH(%'%.9:
7K&O))
(1
86
&
6LHPHQV$*,QGXVWULHVWU'%DG1HXVWDGW
0DGHLQ*HUPDQ\
Figura 1-5
Schema di principio della targhetta dei dati
Tabella 1- 2
Descrizione dei dati tecnici riportati sulla targhetta
Posizion
e
Descrizione / Dati tecnici
1
Tipo di motore: Motori sincroni
2
N. ident., numero di serie
3
Coppia da fermo M0 [Nm]
4
Coppia nominale MN [Nm]
5
Identificazione tipo di encoder
6
Dati del freno di stazionamento: tipo, tensione, assorbimento di potenza
7
Norma per tutte le macchine elettriche rotanti
8
Indirizzo dell'impianto di produzione
9
Corrente da fermo l0 [A]
10
Corrente nominale IN [A]
11
Tensione indotta con numero di giri nominale UIN [V]
12
Classe di temperatura
13
Versione motore
14
Norme e prescrizioni
15
Codice 2D
16
Grado di protezione
17
Massa del motore m [kg]
18
Numero di giri nominale nN [1/min]
19
Numero di giri massimo nmax [1/min]
20
SIEMENS Tipo motore/numero di ordinazione
Motori sincroni 1FK7, generazione 2
26
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Descrizione dei motori
1.7 Panoramica dei motori/assegnazione dei Motor Module
1.7
Panoramica dei motori/assegnazione dei Motor Module
1FK7 per SINAMICS S120 Booksize, tensione del circuito intermedio DC 510 V ... 720 V, (tensione di
rete 3 AC 380 V ... 480 V)
Tabella 1- 3
1FK7 Compact
Motore
Numero di
ordinazione
M0 (100 K)
[Nm]
Convertitore: SINAMICS S120 Booksize
Dimensioni
connettori /
Numero di ordinazione
IN [A]
Mmax
Cavo di potenza
Numero di ordinazione
(100K)
[Nm]
sezione
conduttori
1FK7011-5AK7
0,18
0,5 / 4x1,5
6SL312❑-❑TE13-0AA3
3
0,5
6FX5002-5DN20-❑❑❑❑
1FK7015-5AK7
0,35
0,5 / 4x1,5
6SL312❑-❑TE13-0AA3
3
1,0
6FX5002-5DN20-❑❑❑❑
1FK7022-5AK7
0,85
1 / 4x1,5
6SL312❑-❑TE13-0AA3
3
2,8
6FX❑002-5❑N01-❑❑❑❑
1FK7032-2AK7
1,15
1 / 4x1,5
6SL312❑-❑TE13-0AA3
3
4,2
6FX❑002-5❑N01-❑❑❑❑
1FK7034-2AK7
1,6
1 / 4x1,5
6SL312❑-❑TE13-0AA3
3
5,0
6FX❑002-5❑N01-❑❑❑❑
1FK7040-2AK7
1,6
1 / 4x1,5
6SL312❑-❑TE13-0AA3
3
4,0
6FX❑002-5❑N01-❑❑❑❑
1FK7042-2AC7
3,0
1 / 4x1,5
6SL312❑-❑TE13-0AA3
3
10,5
6FX❑002-5❑N01-❑❑❑❑
1FK7042-2AF7
3,0
1 / 4x1,5
6SL312❑-❑TE13-0AA3
3
8,2
6FX❑002-5❑N01-❑❑❑❑
1FK7042-2AK7
3,0
1 / 4x1,5
6SL312❑-❑TE15-0AA3
5
6,8
6FX❑002-5❑N01-❑❑❑❑
1FK7060-2AC7
6,0
1 / 4x1,5
6SL312❑-❑TE13-0AA3
3
11,4
6FX❑002-5❑N01-❑❑❑❑
1FK7060-2AF7
6,0
1 / 4x1,5
6SL312❑-❑TE15-0AA3
5
13,2
6FX❑002-5❑N01-❑❑❑❑
1FK7060-2AH7
6,0
1 - 4x1,5
6SL312❑-❑TE21-0AA3
9
15,8
6FX❑002-5❑N01-❑❑❑❑
1FK7062-2AC7
8,5
1 / 4x1,5
6SL312❑-❑TE13-0AA3
3
17,0
6FX❑002-5❑N01-❑❑❑❑
1FK7062-2AF7
8,5
1 / 4x1,5
6SL312❑-❑TE15-0AA3
5
16,0
6FX❑002-5❑N01-❑❑❑❑
1FK7062-2AH7
8,5
1 / 4x1,5
6SL312❑-❑TE21-0AA3
9
18,5
6FX❑002-5❑N01-❑❑❑❑
1FK7063-2AC7
11,0
1 / 4x1,5
6SL312❑-❑TE15-0AA3
5
20,8
6FX❑002-5❑N01-❑❑❑❑
1FK7063-2AF7
11,0
1 / 4x1,5
6SL312❑-❑TE21-0AA3
9
24,3
6FX❑002-5❑N01-❑❑❑❑
1FK7063-2AH7
11,0
1 / 4x1,5
6SL312❑-❑TE21-8AA3
18
30,9
6FX❑002-5❑N01-❑❑❑❑
1FK7080-2AF7
8,0
1 / 4x1,5
6SL312❑-❑TE15-0AA3
5
16,5
6FX❑002-5❑N01-❑❑❑❑
1FK7080-2AH7
8,0
1 / 4x1,5
6SL312❑-❑TE21-0AA3
9
18,5
6FX❑002-5❑N01-❑❑❑❑
1FK7081-2AC7
12,0
1 / 4x1,5
6SL312❑-❑TE15-0AA3
5
24,0
6FX❑002-5❑N01-❑❑❑❑
1FK7081-2AF7
12,0
1 / 4x1,5
6SL312❑-❑TE21-0AA3
9
24,7
6FX❑002-5❑N01-❑❑❑❑
1FK7081-2AH7
12,0
1 / 4x1,5
6SL312❑-❑TE21-8AA3
18
31,2
6FX❑002-5❑N01-❑❑❑❑
1FK7083-2AC7
16,0
1 / 4x1,5
6SL312❑-❑TE21-0AA3
9
36,7
6FX❑002-5❑N01-❑❑❑❑
1FK7083-2AF7
16,0
1 / 4x1,5
6SL312❑-❑TE21-8AA3
9
28,5
6FX❑002-5❑N01-❑❑❑❑
1FK7083-2AH7
16,0
1 / 4x1,5
6SL312❑-❑TE21-8AA3
18
36,7
6FX❑002-5❑N01-❑❑❑❑
1FK7084-2AC7
20,0
1 / 4x1,5
6SL312❑-❑TE21-0AA3
9
41,9
6FX❑002-5❑N01-❑❑❑❑
1FK7084-2AF7
20,0
1 / 4x1,5
6SL312❑-❑TE21-8AA3
18
55,0
6FX❑002-5❑N01-❑❑❑❑
1FK7100-2AC7
18,0
1 / 4x1,5
6SL312❑-❑TE21-0AA3
9
38,1
6FX❑002-5❑N01-❑❑❑❑
6FX❑002-5❑N01-❑❑❑❑
1FK7100-2AF7
18,0
1 / 4x1,5
6SL312❑-❑TE21-8AA3
18
54,0
1FK7101-2AC7
27,0
1,5 / 4x1,5
6SL312❑-❑TE21-8AA3
18
73,0
6FX❑002-5❑N21-❑❑❑❑
1FK7101-2AF7
27,0
1,5 / 4x2,5
6SL312❑-❑TE21-8AA3
18
52,0
6FX❑002-5❑N31-❑❑❑❑
1FK7103-2AC7
36,0
1,5 / 4x1,5
6SL312❑-❑TE21-8AA3
18
87,0
6FX❑002-5❑N21-❑❑❑❑
1FK7103-2AF7
36,0
1,5 / 4x4
6SL312❑-❑TE23-0AA3
30
77,0
6FX❑002-5❑N41-❑❑❑❑
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
27
Descrizione dei motori
1.7 Panoramica dei motori/assegnazione dei Motor Module
Motore
Numero di
ordinazione
M0 (100 K)
[Nm]
Convertitore: SINAMICS S120 Booksize
Dimensioni
connettori /
Numero di ordinazione
IN [A]
Cavo di potenza
Mmax
Numero di ordinazione
(100K)
[Nm]
sezione
conduttori
1FK7105-2AC7
48,0
1,5 / 4x2,5
6SL312❑-❑TE23-0AA3
30
126,0
6FX❑002-5❑N31-❑❑❑❑
1FK7105-2AF7
48,0
1,5 / 4x6
6SL312❑-❑TE23-0AA3
30
87,0
6FX❑002-5❑N51-❑❑❑❑
Tabella 1- 4
1FK7 High Inertia
Motore
Numero di
ordinazione
M0 (100 K)
[Nm]
Convertitore: SINAMICS S120 Booksize
Dimensioni
connettori /
Numero di ordinazione
IN [A]
Cavo di potenza
Mmax
Numero di ordinazione
(100K)
[Nm]
sezione
conduttori
1FK7042-3BK7
3,0
1 / 4x1,5
6SL312❑-❑TE15-0AA3
5
6,8
6FX❑002-5❑N01-❑❑❑❑
1FK7060-3BF7
6,0
1 / 4x1,5
6SL312❑-❑TE15-0AA3
5
13,2
6FX❑002-5❑N01-❑❑❑❑
1FK7062-3BF7
8,5
1 / 4x1,5
6SL312❑-❑TE15-0AA3
5
16,0
6FX❑002-5❑N01-❑❑❑❑
1FK7081-3BF7
12,0
1 / 4x1,5
6SL312❑-❑TE21-0AA3
9
24,7
6FX❑002-5❑N01-❑❑❑❑
1FK7084-3BC7
20,0
1 / 4x1,5
6SL312❑-❑TE21-0AA3
9
41,9
6FX❑002-5❑N01-❑❑❑❑
1FK7084-3BF7
20,0
1 / 4x1,5
6SL312❑-❑TE21-8AA3
18
55,0
6FX❑002-5❑N01-❑❑❑❑
Dimensioni
connettori /
Numero di ordinazione
Tabella 1- 5
1FK7 High Dynamic
Motore
Numero di
ordinazione
M0 (100 K)
[Nm]
Convertitore: SINAMICS S120 Booksize
IN [A]
Cavo di potenza
Mmax
Numero di ordinazione
(100K)
[Nm]
sezione
conduttori
1FK7033-4CK7
1,3
1 / 4x1,5
6SL312❑-❑TE13-0AA3
3
3,5
1FK7043-4CH7
3,5
1 / 4x1,5
6SL312❑-❑TE15-0AA3
5
8,3
6FX❑002-5❑N01-❑❑❑❑
6FX❑002-5❑N01-❑❑❑❑
1FK7043-4CK7
3,5
1 / 4x1,5
6SL312❑-❑TE21-0AA3
9
10,0
6FX❑002-5❑N01-❑❑❑❑
6FX❑002-5❑N01-❑❑❑❑
1FK7044-4CF7
4,5
1 / 4x1,5
6SL312❑-❑TE15-0AA3
5
11,0
1FK7044-4CH7
4,5
1 / 4x1,5
6SL312❑-❑TE21-0AA3
9
13,0
6FX❑002-5❑N01-❑❑❑❑
1FK7061-4CF7
6,4
1 / 4x1,5
6SL312❑-❑TE21-0AA3
9
17,0
6FX❑002-5❑N01-❑❑❑❑
1FK7061-4CH7
6,4
1 / 4x1,5
6SL312❑-❑TE21-0AA3
9
13,1
6FX❑002-5❑N01-❑❑❑❑
1FK7064-4CC7
12,0
1 / 4x1,5
6SL312❑-❑TE21-0AA3
9
26,0
6FX❑002-5❑N01-❑❑❑❑
1FK7064-4CF7
12,0
1 / 4x1,5
6SL312❑-❑TE21-8AA3
18
32,0
6FX❑002-5❑N01-❑❑❑❑
1FK7064-4CH7
12,0
1 / 4x1,5
6SL312❑-❑TE21-8AA3
18
27,5
6FX❑002-5❑N01-❑❑❑❑
1FK7085-4CC7
22,0
1 / 4x1,5
6SL312❑-❑TE21-8AA3
18
53,0
6FX❑002-5❑N01-❑❑❑❑
1FK7085-4CF7
22,0
1,5 / 4x4
6SL312❑-❑TE23-0AA3
30
51,0
6FX❑002-5❑N41-❑❑❑❑
1FK7086-4CC7
28,0
1 / 4x1,5
6SL312❑-❑TE21-8AA3
18
69,0
6FX❑002-5❑N01-❑❑❑❑
1FK7086-4CF7
28,0
1,5 / 4x4
6SL312❑-❑TE23-0AA3
30
66,0
6FX❑002-5❑N41-❑❑❑❑
Motori sincroni 1FK7, generazione 2
28
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Descrizione dei motori
1.7 Panoramica dei motori/assegnazione dei Motor Module
1FK7 per SINAMICS S120 Booksize Compact, tensione del circuito intermedio DC 510 V ... 720 V,
(tensione di rete 3 AC 380 V ... 480 V)
Tabella 1- 6
1FK7 Compact
Motore
Convertitore:
Cavo di potenza
SINAMICS S120 Booksize Compact
Numero di
ordinazione
M0 (100 K)
[Nm]
Dimensioni
connettori /
Numero di ordinazione
IN [A]
Mmax
Numero di ordinazione
(100K)
[Nm]
sezione
conduttori
1FK7011-5AK7
0,18
0,5 / 4x1,5
6SL3420-❑TE13-0AA0
3
0,5
6FX5002-5DN30-❑❑❑❑
1FK7015-5AK7
0,35
0,5 / 4x1,5
6SL3420-❑TE13-0AA0
3
1,0
6FX5002-5DN30-❑❑❑❑
1FK7022-5AK7
0,85
1 / 4x1,5
6SL3420-❑TE13-0AA0
3
3,4
6FX❑002-5❑G10-❑❑❑❑
1FK7032-2AK7
1,15
1 / 4x1,5
6SL3420-❑TE13-0AA0
3
4,5
6FX❑002-5❑G10-❑❑❑❑
1FK7034-2AK7
1,6
1 / 4x1,5
6SL3420-❑TE13-0AA0
3
6,5
6FX❑002-5❑G10-❑❑❑❑
1FK7040-2AK7
1,6
1 / 4x1,5
6SL3420-❑TE13-0AA0
3
5,1
6FX❑002-5❑G10-❑❑❑❑
1FK7042-2AC7
3,0
1 / 4x1,5
6SL3420-❑TE13-0AA0
3
10,5
6FX❑002-5❑G10-❑❑❑❑
1FK7042-2AF7
3,0
1 / 4x1,5
6SL3420-❑TE13-0AA0
3
10,5
6FX❑002-5❑G10-❑❑❑❑
1FK7042-2AK7
3,0
1 / 4x1,5
6SL3420-❑TE15-0AA0
5
10,3
6FX❑002-5❑G10-❑❑❑❑
1FK7060-2AC7
6,0
1 / 4x1,5
6SL3420-❑TE13-0AA0
3
15,6
6FX❑002-5❑G10-❑❑❑❑
1FK7060-2AF7
6,0
1 / 4x1,5
6SL3420-❑TE15-0AA0
5
18,0
6FX❑002-5❑G10-❑❑❑❑
1FK7060-2AH7
6,0
1 / 4x1,5
6SL3420-1TE21-0AA0
9
18,0
6FX❑002-5❑G10-❑❑❑❑
1FK7062-2AC7
8,5
1 / 4x1,5
6SL3420-❑TE13-0AA0
3
22,4
6FX❑002-5❑G10-❑❑❑❑
1FK7062-2AF7
8,5
1 / 4x1,5
6SL3420-❑TE15-0AA0
5
21,4
6FX❑002-5❑G10-❑❑❑❑
1FK7062-2AH7
8,5
1 / 4x1,5
6SL3420-1TE21-0AA0
9
24,6
6FX❑002-5❑G10-❑❑❑❑
1FK7063-2AC7
11,0
1 / 4x1,5
6SL3420-❑TE15-0AA0
5
29,1
6FX❑002-5❑G10-❑❑❑❑
1FK7063-2AF7
11,0
1 / 4x1,5
6SL3420-1TE21-0AA0
9
33,9
6FX❑002-5❑G10-❑❑❑❑
1FK7063-2AH7
11,0
1 / 4x1,5
6SL3420-1TE21-8AA0
18
35,0
6FX❑002-5❑G10-❑❑❑❑
1FK7080-2AF7
8,0
1 / 4x1,5
6SL3420-❑TE15-0AA0
5
21,7
6FX❑002-5❑G10-❑❑❑❑
1FK7080-2AH7
8,0
1 / 4x1,5
6SL3420-1TE21-0AA0
9
24,7
6FX❑002-5❑G10-❑❑❑❑
1FK7081-2AC7
12,0
1 / 4x1,5
6SL3420-❑TE15-0AA0
5
32,9
6FX❑002-5❑G10-❑❑❑❑
6FX❑002-5❑G10-❑❑❑❑
1FK7081-2AF7
12,0
1 / 4x1,5
6SL3420-1TE21-0AA0
9
33,9
1FK7081-2AH7
12,0
1 / 4x1,5
6SL3420-1TE21-8AA0
18
37,0
6FX❑002-5❑G10-❑❑❑❑
1FK7083-2AC7
16,0
1 / 4x1,5
6SL3420-1TE21-0AA0
9
49,3
6FX❑002-5❑G10-❑❑❑❑
6FX❑002-5❑G10-❑❑❑❑
1FK7083-2AF7
16,0
1 / 4x1,5
6SL3420-1TE21-8AA0
18
50,0
1FK7083-2AH7
16,0
1 / 4x1,5
6SL3420-1TE21-8AA0
18
49,3
6FX❑002-5❑G10-❑❑❑❑
1FK7084-2AC7
20,0
1 / 4x1,5
6SL3420-1TE21-0AA0
9
58,2
6FX❑002-5❑G10-❑❑❑❑
1FK7084-2AF7
20,0
1 / 4x1,5
6SL3420-1TE21-8AA0
18
61,0
6FX❑002-5❑G10-❑❑❑❑
1FK7100-2AC7
18,0
1 / 4x1,5
6SL3420-1TE21-0AA0
9
53,3
6FX❑002-5❑G10-❑❑❑❑
1FK7100-2AF7
18,0
1 / 4x1,5
6SL3420-1TE21-8AA0
18
55,0
6FX❑002-5❑G10-❑❑❑❑
1FK7101-2AC7
27,0
1,5 / 4x1,5
6SL3420-1TE21-8AA0
18
80,0
6FX❑002-5❑G22-❑❑❑❑
1FK7101-2AF7
27,0
1,5 / 4x2,5
6SL3420-1TE21-8AA0
18
70,4
6FX❑002-5❑G32-❑❑❑❑
1FK7103-2AC7
36,0
1,5 / 4x1,5
6SL3420-1TE21-8AA0
18
108,0
6FX❑002-5❑G22-❑❑❑❑
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
29
Descrizione dei motori
1.7 Panoramica dei motori/assegnazione dei Motor Module
Tabella 1- 7
1FK7 High Inertia
Motore
Convertitore:
Cavo di potenza
SINAMICS S120 Booksize Compact
Numero di
ordinazione
M0 (100 K)
[Nm]
Dimensioni
connettori /
Numero di ordinazione
IN [A]
Mmax
Numero di ordinazione
(100K)
[Nm]
sezione
conduttori
1FK7042-3BK7
3,0
1 / 4x1,5
6SL3420-❑TE15-0AA0
5
10,3
6FX❑002-5❑G10-❑❑❑❑
1FK7060-3BF7
6,0
1 / 4x1,5
6SL3420-❑TE15-0AA0
5
18,0
6FX❑002-5❑G10-❑❑❑❑
1FK7062-3BF7
8,5
1 / 4x1,5
6SL3420-❑TE15-0AA0
5
21,4
6FX❑002-5❑G10-❑❑❑❑
1FK7081-3BF7
12,0
1 / 4x1,5
6SL3420-1TE21-0AA0
9
33,9
6FX❑002-5❑G10-❑❑❑❑
1FK7084-3BC7
20,0
1 / 4x1,5
6SL3420-1TE21-0AA0
9
58,2
6FX❑002-5❑G10-❑❑❑❑
1FK7084-3BF7
20,0
1 / 4x1,5
6SL3420-1TE21-8AA0
18
61,0
6FX❑002-5❑G10-❑❑❑❑
Tabella 1- 8
1FK7 High Dynamic
Motore
Convertitore:
Cavo di potenza
SINAMICS S120 Booksize Compact
Numero di
ordinazione
M0 (100 K)
[Nm]
Dimensioni
connettori /
Numero di ordinazione
IN [A]
1,3
Numero di ordinazione
(100K)
[Nm]
sezione
conduttori
1FK7033-4CK7
Mmax
1 / 4x1,5
6SL3420-❑TE13-0AA0
3
4,3
6FX❑002-5❑G10-❑❑❑❑
1FK7043-4CH7
3,5
1 / 4x1,5
6SL3420-❑TE15-0AA0
5
10,0
6FX❑002-5❑G10-❑❑❑❑
1FK7043-4CK7
3,5
1 / 4x1,5
6SL3420-1TE21-0AA0
9
10,0
6FX❑002-5❑G10-❑❑❑❑
1FK7044-4CF7
4,5
1 / 4x1,5
6SL3420-❑TE15-0AA0
5
13,0
6FX❑002-5❑G10-❑❑❑❑
1FK7044-4CH7
4,5
1 / 4x1,5
6SL3420-1TE21-0AA0
9
13,0
6FX❑002-5❑G10-❑❑❑❑
1FK7061-4CF7
6,4
1 / 4x1,5
6SL3420-1TE21-0AA0
9
17,3
6FX❑002-5❑G10-❑❑❑❑
1FK7061-4CH7
6,4
1 / 4x1,5
6SL3420-1TE21-0AA0
9
17,3
6FX❑002-5❑G10-❑❑❑❑
1FK7064-4CC7
12,0
1 / 4x1,5
6SL3420-1TE21-0AA0
9
32,0
6FX❑002-5❑G10-❑❑❑❑
1FK7064-4CF7
12,0
1 / 4x1,5
6SL3420-1TE21-8AA0
18
32,0
6FX❑002-5❑G10-❑❑❑❑
1FK7064-4CH7
12,0
1 / 4x1,5
6SL3420-1TE21-8AA0
18
32,0
6FX❑002-5❑G10-❑❑❑❑
1FK7085-4CC7
22,0
1 / 4x1,5
6SL3420-1TE21-8AA0
18
65,0
6FX❑002-5❑G10-❑❑❑❑
1FK7086-4CC7
28,0
1 / 4x1,5
6SL3420-1TE21-8AA0
18
90,1
6FX❑002-5❑G10-❑❑❑❑
Motori sincroni 1FK7, generazione 2
30
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Descrizione dei motori
1.7 Panoramica dei motori/assegnazione dei Motor Module
1FK7 per SINAMICS S110/S120 Power Module PM340,
tensione del circuito intermedio DC 510 V ... 720 V, (tensione di rete 3 AC 380 V ... 480 V)
Tabella 1- 9
1FK7 Compact
Motore
Convertitore: SINAMICS S110 / S120
Cavo di potenza
Power Module PM340
Numero di
ordinazione
M0 (100 K)
[Nm]
Dimensioni
connettori /
Numero di ordinazione
IN [A]
Mmax
Numero di ordinazione
(100K)
[Nm]
sezione
conduttori
1FK7011-5AK7
0,18
0,5 / 4x1,5
6SL3210-1SE11-7UA0
1,7
0,4
6FX5002-5DN30-❑❑❑❑
1FK7015-5AK7
0,35
0,5 / 4x1,5
6SL3210-1SE11-7UA0
1,7
0,8
6FX5002-5DN30-❑❑❑❑
1FK7022-5AK7
0,85
1 / 4x1,5
6SL3210-1SE12-2UA0
2,2
2,0
6FX❑002-5❑G10-❑❑❑❑
1FK7032-2AK7
1,15
1 / 4x1,5
6SL3210-1SE11-7UA0
1,7
2,3
6FX❑002-5❑G10-❑❑❑❑
1FK7034-2AK7
1,6
1 / 4x1,5
6SL3210-1SE12-2UA0
2,2
3,7
6FX❑002-5❑G10-❑❑❑❑
1FK7040-2AK7
1,6
1 / 4x1,5
6SL3210-1SE13-1UA0
3,1
4,1
6FX❑002-5❑G10-❑❑❑❑
1FK7042-2AC7
3,0
1 / 4x1,5
6SL3210-1SE11-7UA0
1,7
6,4
6FX❑002-5❑G10-❑❑❑❑
1FK7042-2AF7
3,0
1 / 4x1,5
6SL3210-1SE12-2UA0
2,2
6,0
6FX❑002-5❑G10-❑❑❑❑
1FK7042-2AK7
3,0
1 / 4x1,5
6SL3210-1SE16-0❑A0
5,9
8,1
6FX❑002-5❑G10-❑❑❑❑
1FK7060-2AC7
6,0
1 / 4x1,5
6SL3210-1SE13-1UA0
3,1
11,1
6FX❑002-5❑G10-❑❑❑❑
1FK7060-2AF7
6,0
1 / 4x1,5
6SL3210-1SE16-0❑A0
5,9
14,7
6FX❑002-5❑G10-❑❑❑❑
1FK7060-2AH7
6,0
1 / 4x1,5
6SL3210-1SE17-7❑A0
7,7
13,6
6FX❑002-5❑G10-❑❑❑❑
1FK7062-2AC7
8,5
1 / 4x1,5
6SL3210-1SE13-1UA0
3,1
16,2
6FX❑002-5❑G10-❑❑❑❑
1FK7062-2AF7
8,5
1 / 4x1,5
6SL3210-1SE16-0❑A0
5,9
17,5
6FX❑002-5❑G10-❑❑❑❑
1FK7062-2AH7
8,5
1 / 4x1,5
6SL3210-1SE21-0❑A0
10,2
19,7
6FX❑002-5❑G10-❑❑❑❑
1FK7063-2AC7
11,0
1 / 4x1,5
6SL3210-1SE16-0❑A0
5,9
23,4
6FX❑002-5❑G10-❑❑❑❑
1FK7063-2AF7
11,0
1 / 4x1,5
6SL3210-1SE21-0❑A0
10,2
26,5
6FX❑002-5❑G10-❑❑❑❑
1FK7063-2AH7
11,0
1 / 4x1,5
6SL3210-1SE21-8❑A0
18
23,1
6FX❑002-5❑G10-❑❑❑❑
1FK7080-2AF7
8,0
1 / 4x1,5
6SL3210-1SE16-0❑A0
5,9
17,8
6FX❑002-5❑G10-❑❑❑❑
1FK7080-2AH7
8,0
1 / 4x1,5
6SL3210-1SE17-7❑A0
7,7
15,6
6FX❑002-5❑G10-❑❑❑❑
1FK7081-2AC7
12,0
1 / 4x1,5
6SL3210-1SE16-0❑A0
5,9
26,7
6FX❑002-5❑G10-❑❑❑❑
1FK7081-2AF7
12,0
1 / 4x1,5
6SL3210-1SE21-0❑A0
10,2
26,5
6FX❑002-5❑G10-❑❑❑❑
1FK7081-2AH7
12,0
1 / 4x1,5
6SL3210-1SE21-8❑A0
18
23,2
6FX❑002-5❑G10-❑❑❑❑
1FK7083-2AC7
16,0
1 / 4x1,5
6SL3210-1SE17-7❑A0
7,7
30,9
6FX❑002-5❑G10-❑❑❑❑
1FK7083-2AF7
16,0
1 / 4x1,5
6SL3210-1SE21-0❑A0
10,2
30,5
6FX❑002-5❑G10-❑❑❑❑
1FK7083-2AH7
16,0
1 / 4x1,5
6SL3210-1SE21-8❑A0
18
27,0
6FX❑002-5❑G10-❑❑❑❑
1FK7084-2AC7
20,0
1 / 4x1,5
6SL3210-1SE21-0❑A0
10,2
45,4
6FX❑002-5❑G10-❑❑❑❑
1FK7084-2AF7
20,0
1 / 4x1,5
6SL3210-1SE21-8❑A0
18
41,5
6FX❑002-5❑G10-❑❑❑❑
1FK7100-2AC7
18,0
1 / 4x1,5
6SL3210-1SE21-0❑A0
10,2
41,5
6FX❑002-5❑G10-❑❑❑❑
1FK7100-2AF7
18,0
1 / 4x1,5
6SL3210-1SE21-8❑A0
18
40,7
6FX❑002-5❑G10-❑❑❑❑
1FK7101-2AC7
27,0
1,5 / 4x1,5
6SL3210-1SE21-8❑A0
18
55,0
6FX❑002-5❑G22-❑❑❑❑
1FK7101-2AF7
27,0
1,5 / 4x2,5
6SL3210-1SE22-5❑A0
25
51,8
6FX❑002-5❑G32-❑❑❑❑
1FK7103-2AC7
36,0
1,5 / 4x1,5
6SL3210-1SE21-8❑A0
18
64,2
6FX❑002-5❑G22-❑❑❑❑
1FK7103-2AF7
36,0
1,5 / 4x4
6SL3210-1SE23-2❑A0
32
69,7
6FX❑002-5❑G42-❑❑❑❑
1FK7105-2AC7
48,0
1,5 / 4x2,5
6SL3210-1SE22-5❑A0
25
87,3
6FX❑002-5❑G32-❑❑❑❑
1FK7105-2AF7
48,0
1,5 / 4x6
6SL3210-1SE23-2❑A0
32
78,1
6FX❑002-5❑G52-❑❑❑❑
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
31
Descrizione dei motori
1.7 Panoramica dei motori/assegnazione dei Motor Module
Tabella 1- 10 1FK7 High Inertia
Motore
Convertitore: SINAMICS S110 / S120
Cavo di potenza
Power Module PM340
Numero di
ordinazione
M0 (100 K)
[Nm]
Dimensioni
connettori /
Numero di ordinazione
IN [A]
Mmax
Numero di ordinazione
(100K)
[Nm]
sezione
conduttori
1FK7042-3BK7
3,0
1 / 4x1,5
6SL3210-1SE16-0❑A0
5,9
8,1
6FX❑002-5❑G10-❑❑❑❑
1FK7060-3BF7
6,0
1 / 4x1,5
6SL3210-1SE16-0❑A0
5,9
14,7
6FX❑002-5❑G10-❑❑❑❑
1FK7062-3BF7
8,5
1 / 4x1,5
6SL3210-1SE16-0❑A0
5,9
17,5
6FX❑002-5❑G10-❑❑❑❑
1FK7081-3BF7
12,0
1 / 4x1,5
6SL3210-1SE21-0❑A0
10,2
26,5
6FX❑002-5❑G10-❑❑❑❑
1FK7084-3BC7
20,0
1 / 4x1,5
6SL3210-1SE21-0❑A0
10,2
45,4
6FX❑002-5❑G10-❑❑❑❑
1FK7084-3BF7
20,0
1 / 4x1,5
6SL3210-1SE21-8❑A0
18
41,5
6FX❑002-5❑G10-❑❑❑❑
Tabella 1- 11 1FK7 High Dynamic
Motore
Convertitore: SINAMICS S110 / S120
Cavo di potenza
Power Module PM340
Numero di
ordinazione
M0 (100 K)
[Nm]
Dimensioni
connettori /
Numero di ordinazione
IN [A]
1,3
1 / 4x1,5
Numero di ordinazione
(100K)
[Nm]
sezione
conduttori
1FK7033-4CK7
Mmax
6SL3210-1SE12-2UA0
2,2
2,6
6FX❑002-5❑G10-❑❑❑❑
1FK7043-4CH7
3,5
1 / 4x1,5
6SL3210-1SE14-1UA0
4,1
6,8
6FX❑002-5❑G10-❑❑❑❑
1FK7043-4CK7
3,5
1 / 4x1,5
6SL3210-1SE16-0❑A0
5,9
7,1
6FX❑002-5❑G10-❑❑❑❑
1FK7044-4CF7
4,5
1 / 4x1,5
6SL3210-1SE14-1UA0
4,1
9,0
6FX❑002-5❑G10-❑❑❑❑
1FK7044-4CH7
4,5
1 / 4x1,5
6SL3210-1SE16-0❑A0
5,9
9,6
6FX❑002-5❑G10-❑❑❑❑
1FK7061-4CF7
6,4
1 / 4x1,5
6SL3210-1SE17-7❑A0
7,7
14,8
6FX❑002-5❑G10-❑❑❑❑
1FK7061-4CH7
6,4
1 / 4x1,5
6SL3210-1SE21-0❑A0
10,2
13,9
6FX❑002-5❑G10-❑❑❑❑
1FK7064-4CC7
12,0
1 / 4x1,5
6SL3210-1SE21-0❑A0
10,2
27,2
6FX❑002-5❑G10-❑❑❑❑
1FK7064-4CF7
12,0
1 / 4x1,5
6SL3210-1SE21-8❑A0
18
26,7
6FX❑002-5❑G10-❑❑❑❑
1FK7064-4CH7
12,0
1 / 4x1,5
6SL3210-1SE21-8❑A0
18
20,1
6FX❑002-5❑G10-❑❑❑❑
1FK7085-4CC7
22,0
1 / 4x1,5
6SL3210-1SE21-8❑A0
18
39,8
6FX❑002-5❑G10-❑❑❑❑
6FX❑002-5❑G42-❑❑❑❑
1FK7085-4CF7
22,0
1,5 / 4x4
6SL3210-1SE22-5❑A0
25
35,8
1FK7086-4CC7
28,0
1 / 4x1,5
6SL3210-1SE21-8❑A0
18
52,1
6FX❑002-5❑G10-❑❑❑❑
1FK7086-4CF7
28,0
1,5 / 4x4
6SL3210-1SE22-5❑A0
25
46,9
6FX❑002-5❑G42-❑❑❑❑
Motori sincroni 1FK7, generazione 2
32
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Descrizione dei motori
1.7 Panoramica dei motori/assegnazione dei Motor Module
1FK7 per SINAMICS S110/S120 Power Module PM340,
tensione del circuito intermedio DC 270 V ... 330 V, (tensione di rete 1 AC 200 V ... 240 V)
Tabella 1- 12 1FK7 Compact
Motore
Convertitore: SINAMICS S110 / S120
Cavo di potenza
Power Module PM340
Numero di
ordinazione
M0 (100 K)
[Nm]
Dimensioni
connettori /
Numero di ordinazione
IN [A]
Mmax
Numero di ordinazione
(100K)
[Nm]
sezione
conduttori
1FK7011-5AK2
0,18
0,5 / 4x1,5
6SL3210-1SB11-0❑A0
0,9
0,4
6FX5002-5DN30-❑❑❑❑
1FK7015-5AK2
0,35
0,5 / 4x1,5
6SL3210-1SB11-0❑A0
0,9
0,8
6FX5002-5DN30-❑❑❑❑
1FK7022-5AK2
0,85
1 / 4x1,5
6SL3210-1SB12-3❑A0
2,3
2,1
6FX❑002-5❑G10-❑❑❑❑
1FK7032-2AF2
1,15
1 / 4x1,5
6SL3210-1SB12-3❑A0
2,3
3,2
6FX❑002-5❑G10-❑❑❑❑
1FK7034-2AF2
1,6
1 / 4x1,5
6SL3210-1SB12-3❑A0
2,3
3,8
6FX❑002-5❑G10-❑❑❑❑
1FK7042-2AF2
3,0
1 / 4x1,5
6SL3210-1SB14-0❑A0
3,9
5,9
6FX❑002-5❑G10-❑❑❑❑
Tabella 1- 13 1FK7 High Dynamic
Motore
Convertitore: SINAMICS S110 / S120
Cavo di potenza
Power Module PM340
Numero di
ordinazione
M0 (100 K)
[Nm]
Dimensioni
connettori /
Numero di ordinazione
IN [A]
Mmax
Numero di ordinazione
(100K)
[Nm]
sezione
conduttori
1FK7033-4CF2
1,3
1 / 4x1,5
6SL3210-1SB12-3❑A0
2,3
2,7
6FX❑002-5❑G10-❑❑❑❑
1FK7043-4CF2
3,3
1 / 4x1,5
6SL3210-1SB14-0❑A0
3,9
6,4
6FX❑002-5❑G10-❑❑❑❑
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
33
Descrizione dei motori
1.7 Panoramica dei motori/assegnazione dei Motor Module
Motori sincroni 1FK7, generazione 2
34
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
2
Progettazione
2.1
Software di progettazione
2.1.1
Tool di progettazione SIZER for SIEMENS Drives
Panoramica
Figura 2-1
SIZER for SIEMENS Drives
Per facilitare la progettazione della famiglia di azionamenti SINAMICS viene messo a
disposizione il tool di progettazione SIZER for SIEMENS Drives. Questo tool fornisce un
supporto per il dimensionamento tecnico dei componenti hardware e firmware necessari per
un compito di azionamento. SIZER for SIEMENS Drives comprende la progettazione del
sistema di azionamento completo e consente la gestione non solo di semplici azionamenti
singoli ma anche di quelli complessi multiasse.
SIZER for SIEMENS Drives supporta tutte le fasi della progettazione in un workflow:
● Progettazione dell'alimentazione da rete
● Dimensionamento dei motori e dei riduttori, compreso il calcolo degli elementi meccanici
di trasmissione
● Progettazione dei componenti dell'azionamento
● Elencazione degli accessori necessari
● Scelta delle opzioni di performance lato rete e lato motore
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
35
Progettazione
2.1 Software di progettazione
Nella realizzazione di SIZER for SIEMENS Drives è stata data particolare rilevanza alla
semplicità di utilizzo e alla funzionalità complessiva orientata ai compiti relativi agli
azionamenti. Una guida utente completa facilita l'approccio al tool. Informazioni di stato
visualizzano in ogni momento lo stato d'avanzamento della progettazione.
La superficie operativa di SIZER for SIEMENS Drives è realizzata in lingua tedesca e
inglese. La configurazione dell'azionamento viene memorizzata in un progetto. Le funzioni
ed i componenti utilizzati sono rappresentati in una struttura ad albero in base alla loro
correlazione. La rappresentazione d'insieme del progetto consente la progettazione di
sistemi d'azionamento nonché la copiatura/l'immissione/la modifica di azionamenti già
progettati.
Risultati della progettazione sono:
● Lista dei componenti necessari (Export in Excel)
● Dati tecnici del sistema
● Caratteristica
● Descrizione delle ripercussioni in rete
● Rappresentazione dei componenti dell'azionamento e del controllo e disegni quotati dei
motori
Questi risultati sono visualizzati in un albero dei risultati e possono essere utilizzati anche a
scopo di documentazione. Quale supporto per l'utente è disponibile un online-help
tecnologico, che fornisce le seguenti informazioni:
● dati tecnici dettagliati
● informazioni sui sistemi d'azionamento e sui relativi componenti
● criteri decisionali per la scelta dei componenti.
Tabella 2- 1
Numero di ordinazione per SIZER for SIEMENS Drives
Tool di progettazione
Numero di ordinazione (MLFB) dei DVD
SIZER for SIEMENS Drives
6SL3070-0AA00-0AG0
tedesco/inglese
Requisiti minimi del sistema
● PC o PG con Pentium™ III 800 MHz (preferibilmente > 1 GHz)
● 512 Mbyte RAM (preferibilmente 1 GB)
● Almeno 4,1 GB di memoria libera su disco rigido
● 100 MB di memoria libera aggiuntiva sull'unità di sistema di Windows
● Risoluzione schermo 1024×768 pixel (preferibilmente1280 x 1024 pixel)
● Windows™ 7 Professional (32 bit), 7 Ultimate (32 bit), XP Prof SP2, XP Home SP2, XP
64 Bit SP2, Vista Business
● Microsoft Internet Explorer 5.5 SP2
Motori sincroni 1FK7, generazione 2
36
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Progettazione
2.1 Software di progettazione
2.1.2
Software di azionamento/di messa in servizio STARTER
Il tool di messa in servizio STARTER propone
● Messa in servizio
● Ottimizzazione
● la diagnosi
Tabella 2- 2
Numero di ordinazione per STARTER
Messa in servizio
Numero di ordinazione (MLFB) dei DVD
STARTER
6SL3072-0AA00-0AG0
tedesco, inglese, francese, italiano, spagnolo
Requisiti minimi del sistema
● Hardware
– PG o PC con Pentium III min. 800 MHz (preferibilmente > 1 GHz)
– Memoria di lavoro 512 MB (preferibilmente 1 GB)
– Risoluzione schermo 1024 × 768 pixel, 16 bit profondità colore
– Memoria libera sul disco rigido: min. 2 Gbyte;
● Software
– Microsoft Windows 2000 SP4
– Microsoft Windows Server 2003 SP1 e SP2 (PCS7)
– Microsoft Windows XP Professional SP2 e SP3
– Microsoft Windows VISTA Business SP1 *)
– Microsoft Windows VISTA Ultimate SP1 *)
– Microsoft Internet Explorer V6.0 o successivo
*) DCC non utilizzabile.
Con questo sistema operativo STARTER può essere utilizzato solo senza l'opzione DCC.
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
37
Progettazione
2.2 Procedura di progettazione
2.1.3
Tool di messa in servizio SinuCom
Il software di messa in servizio SinuCom, di facile utilizzo, permette di effettuare la messa in
servizio di controllori SINUMERIK in combinazione con gli azionamenti SINAMICS S120 e
SIMODRIVE 611 digital.
Tabella 2- 3
Numero di ordinazione per SinuCom
Messa in servizio
Numero di ordinazione (MLFB) dei DVD
SinuCom
6FC5862-2YC00-0YA0
tedesco, inglese, francese, italiano, spagnolo
2.2
Procedura di progettazione
Motion Control
Gli azionamenti sono ottimizzati per svolgere compiti di movimentazione. Essi eseguono
movimenti lineari o rotanti nell'ambito di un ciclo di lavoro predefinito. Tutte le
movimentazioni devono essere ottimizzate dal punto di vista temporale.
Gli azionamenti devono pertanto soddisfare le seguenti esigenze:
● elevata dinamica, cioè tempi di risposta brevi
● sovraccaricabilità, cioè elevata riserva di accelerazione
● ampio campo di regolazione, cioè elevata risoluzione per posizionamenti precisi.
La seguente tabella "Procedura di progettazione" vale per motori sincroni e asincroni.
Motori sincroni 1FK7, generazione 2
38
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Progettazione
2.2 Procedura di progettazione
Procedura generale per la realizzazione di un progetto
La base della progettazione è costituita dalla descrizione funzionale della macchina. La
definizione dei componenti è legata alle performance richieste e viene di solito eseguita nelle
seguenti fasi:
Tabella 2- 4
Passo
2.2.1
Procedura di progettazione
Descrizione delle attività di progettazione
1.
Chiarimenti sul tipo di azionamento
2.
Definizione delle condizioni al contorno e integrazione nell'automazione
3.
Definizione del carico, calcolo della coppia max. di carico e definizione del
motore
4.
Definizione del SINAMICS Motor Module
5.
Ripetizione delle fasi 3 e 4 per altri assi
6.
Calcolo della potenza del circuito intermedio necessaria e definizione del
SINAMICS Line Module
7.
Definizione delle opzioni di potenza lato rete (interruttore principale, fusibili,
filtri di rete ecc.)
8.
Definizione delle performance di regolazione necessarie e scelta della
Control Unit, definizione del cablaggio dei componenti
9.
Definizione di ulteriori componenti del sistema (ad es. resistenze di
frenatura)
10.
Calcolo del fabbisogno di corrente per l'alimentazione a 24 V DC dei
componenti e definizione degli alimentatori (apparecchi SITOP, Control
Supply Module)
11.
Definizione dei componenti per la tecnica di collegamento
12.
Struttura dei componenti del gruppo di azionamento
13.
Calcolo delle sezioni necessarie dei cavi per il collegamento della rete e dei
motori
14.
Osservare gli spazi liberi da rispettare nel montaggio del sistema
Vedere il
capitolo
successivo.
Vedere il
catalogo
1. Chiarimenti sul tipo di azionamento
La scelta del motore avviene sulla base della coppia necessaria che è definita dal tipo di
impiego come p.es. azionamenti di nastri trasportatori, di piattaforme di sollevamento, per
banchi prova, per centrifughe, per acciaierie e cartiere, di avanzamento o per mandrini. Si
devono inoltre tenere in considerazione i riduttori per la trasmissione del movimento o per
adattare la velocità del motore e la sua coppia alle caratteristiche del carico.
Per il calcolo della coppia che il motore deve fornire devono essere noti, oltre alla coppia di
carico che è definita dal tipo di applicazione, anche i seguenti dati meccanici:
● Masse movimentate
● Diametro della ruota motrice
● passo della vite, rapporto di trasmissione
● Indicazioni sulle resistenze d'attrito
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
39
Progettazione
2.2 Procedura di progettazione
● Rendimento meccanico
● Corse di movimentazione
● Velocità massima
● Accelerazione e decelerazione massima
● Tempo di clock.
2.2.2
2. Definizione delle condizioni al contorno e integrazione nell'automazione
Fondamentalmente occorre decidere se si devono utilizzare motori sincroni o asincroni.
I motori sincroni sono da preferirsi in caso di spazi di installazione ridotti e momento d'inerzia
del rotore contenuto e quindi dinamica elevata (tipo di regolazione "Servo").
Con i motori asincroni si raggiungono elevate velocità massime nell'area di deflussaggio del
campo. I motori asincroni sono disponibili anche per potenza più elevata.
Nella progettazione occorre tener presente tra l'altro:
● Il tipo di rete per l'impiego di determinati tipi di motore e/o i filtri di rete per reti IT (reti non
messe a terra).
● L'utilizzo del motore secondo i valori nominali per la sovratemperatura degli avvolgimenti
di 60 K o 100 K (per motori sincroni).
● Le temperature ambiente e l'altitudine di installazione dei motori e dei componenti
dell'azionamento.
● Deflusso del calore dei motori tramite raffreddamento naturale, ventilazione forzata o
raffreddamento ad acqua.
Ulteriori condizioni marginali dipendono dall'integrazione dell'azionamento in un ambiente di
automazione come SINUMERIK o SIMOTION.
Per funzioni Motion Control, tecnologiche (ad es. posizionamento) e di sincronismo si utilizza
il relativo sistema di automazione, ad es. SIMOTION D.
2.2.3
3. Definizione del carico, calcolo della coppia max. di carico e definizione del
motore
La base per la definizione dei motori sono le curve caratteristiche limite, specifiche per tipo di
motore.
Queste descrivono l'andamento della coppia o della potenza riferito al numero di giri e
tengono conto dei limiti del motore sulla base della tensione del circuito intermedio. La
tensione del circuito intermedio dipende dalla tensione di rete. Nel caso di azionamenti a
coppia la tensione del circuito intermedio dipende dal tipo di Line Module o di modulo di
alimentazione o modulo A/R.
Motori sincroni 1FK7, generazione 2
40
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
&RSSLDLQ1P
Progettazione
2.2 Procedura di progettazione
0 .
0PD[GHWHUPLQDWRGDOUDGGUL]]DWRUHPRWRUH
&RSSLDPDVVLPD
&XUYD
FRQGHIOXVVDJJLR
FDUDWWHULVWLFD
6
GHOFDPSR
OLPLWHGLWHQVLRQH
6
6
6.
6.
9HORFLW¢PRWRUHLQJLULPLQ
Figura 2-2
Curve caratteristiche limite per i motori sincroni
La definizione del motore avviene sulla base del carico che viene fornito dall'applicazione.
Per i vari tipi di carico si devono utilizzare diverse curve caratteristiche.
Sono definiti i seguenti tipi di funzionamento:
● Ciclo di carico con durata di inserzione costante
● Ciclo di carico con durata di inserzione intermittente
● Ciclo di carico qualsiasi
Lo scopo è quello di trovare punti di lavoro caratteristici per la coppia e la velocità sulla base
dei quali si possa definire il motore in base al carico.
Dopo aver definito i tipi di funzionamento e le loro specifiche, si calcola la coppia massima
del motore stesso. In generale questa si ricava durante la fase di accelerazione. Qui si
sommano la coppia di carico e la coppia necessaria per accelerare il motore.
Al termine avviene una verifica della coppia massima del motore con le curve caratteristiche
limite del motore.
Nella definizione del motore si devono considerare i seguenti criteri:
● Mantenimento dei limiti dinamici cioè tutti i punti coppia-velocità del carico devono
trovarsi al di sotto delle curve caratteristiche limite rilevanti.
● I limiti termici devono essere rispettati, ossia la coppia motore effettiva alla velocità media
del motore calcolata sulla base del ciclo di carico deve trovarsi al di sotto della curva
caratteristica S1 (funzionamento continuo).
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
41
Progettazione
2.2 Procedura di progettazione
Cicli di carico con durata di inserzione costante
In caso di cicli di carico con durata di inserzione costante sono presenti requisiti specifici per
l'andamento della coppia quale funzione della velocità, ad es.:
M = costante, M ~ n2, M ~ n oppure P = costante.
Figura 2-3
Modo operativo S1 (funzionamento continuo)
Questi azionamenti lavorano tipicamente su un punto di lavoro stazionario. Per questi si
deve eseguire un dimensionamento del carico base. La coppia del carico base deve trovarsi
al di sotto della curva caratteristica S1. La definizione del sovraccarico (ad es.
all'avviamento) avviene sulla base di periodi molto brevi. Va calcolata la corrente di
sovraccarico riferita alla coppia di sovraccarico richiesta. La coppia di picco deve essere
inferiore alla curva caratteristica limite di tensione.
Riassumendo, il dimensionamento si rappresenta come segue:
Figura 2-4
Scelta del motore per cicli di carico con durata di inserzione costante (esempio)
Motori sincroni 1FK7, generazione 2
42
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Progettazione
2.2 Procedura di progettazione
Cicli di carico con durata di inserzione intermittente
Oltre al funzionamento continuo (S1), per i cicli di carico con durata di inserzione
intermittente sono definiti dei modi operativi intermittenti standardizzati (S3) . Si tratta di un
funzionamento che comprende una serie di cicli dello stesso tipo dei quali ognuno
comprende un tempo con carico costante e una pausa.
Figura 2-5
Modo operativo S3 (funzionamento intermittente senza influsso del processo di
avviamento)
Si devono impostare di solito grandezze definite per la durata relativa di inserzione:
● S3 – 60%
● S3 – 40%
● S3 – 25%
Per queste specifiche sono disponibili le corrispondenti curve caratteristiche del motore. La
coppia di carico deve trovarsi al di sotto della relativa curva termica limite del motore. La
valutazione del sovraccarico è stata presa in considerazione nei cicli di carico con durata di
inserzione intermittente.
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
43
Progettazione
2.2 Procedura di progettazione
Ciclo di carico qualsiasi
Un ciclo di carico definisce l'andamento della velocità e della coppia di un motore nel tempo.
Figura 2-6
Esempio di un ciclo di carico
Per ogni intervallo di tempo si imposta una coppia di carico. Oltre alla coppia di carico, per i
processi di accelerazione si devono prendere in considerazione il momento d'inerzia medio
del carico e il momento d'inerzia medio del motore. Eventualmente occorre prevedere una
coppia d'attrito nella direzione contraria al movimento.
Con montaggio del riduttore:
Per il calcolo della coppia di carico o della coppia di accelerazione che deve essere fornita
dal motore, occorre tener conto del rapporto di riduzione e del rendimento del riduttore. Un
elevato rapporto di riduzione è molto vantaggioso sulla precisione del posizionamento riferita
alla risoluzione dell'encoder . Con determinate risoluzioni dell'encoder motore si raggiunge
una elevata risoluzione della posizione da rilevare sulla macchina utilizzando rapporti di
riduzione crescenti.
Nota
Per i cicli di carico all'esterno del campo di deflussaggio si possono applicare le formule
seguenti. Per i cicli di carico nel settore ad indebolimento di campo è necessaria una
progettazione tramite il tool di progettazione SIZER.
Motori sincroni 1FK7, generazione 2
44
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Progettazione
2.2 Procedura di progettazione
Per la coppia motore in un intervallo di tempo Δt i vale:
M0RW L =(J 0 + J*) •
n /D V W L
n /D s W L
2
2
1
•
• i + (J /D V W •
•
+ M /D V t L + M5 ) •
tL
tL
60
60
i•
La velocità del motore ammonta a:
n0RW L = n/D V W L • i
La coppia effettiva si ricava da:
M0RWHII =
La velocità media del motore si ricava da:
n0RWPLWWHO =
JM
Momento di inerzia del motore
JG
Momento d'inerzia del riduttore
Jcarico
Momento di inerzia del carico
ncarico
Velocità del carico
i
Rapporto di riduzione
*
∑M
2
0 RWL
• Δt L
T
n0RWN$
+ n0RWN(
• tL
2
T
ηG
Efficienza del riduttore
Mcarico
Coppia del carico
MR
Coppia d'attrito
T
Tempo di ciclo, tempo di clock
A; E
Valore iniziale, valore finale nell'intervallo di tempo Δt i
te
Durata di inserzione
∆t i
Intervallo di tempo
La coppia effettiva Meff deve trovarsi al di sotto della curva caratteristica S1.
La coppia massima Mmax si ottiene durante il processo di accelerazione. Mmax deve trovarsi
al di sotto della curva caratteristica limite di tensione. Riassumendo, il dimensionamento si
rappresenta come segue:
Figura 2-7
Scelta del motore secondo il ciclo di carico (esempio)
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
45
Progettazione
2.2 Procedura di progettazione
Determinazione del motore
Con la variazione si può ora trovare un motore che soddisfi proprio le condizioni del caso
applicativo (ciclo di carico).
In secondo luogo si verifica se vengono rispettati i limiti termici. Per questo si deve calcolare
la corrente del motore con il carico base. Le norme per questo calcolo dipendono dal tipo di
motore (motore sincrono, motore asincrono) e dal modo operativo (ciclo di carico) che si
utilizzano. Nella progettazione secondo il ciclo di carico con durata di inserzione costante e
sovraccarico, si deve calcolare la corrente di sovraccarico riferita alla coppia di sovraccarico
richiesta.
Infine si devono definire le altre caratteristiche del motore. Queste si definiscono come
configurazione delle opzioni motore.
Motori sincroni 1FK7, generazione 2
46
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Caratteristiche meccaniche dei motori
3.1
3
Raffreddamento
Nei motori autoventilati il calore viene dissipato per conduzione, radiazione e convezione
naturale. Occorre quindi garantire una sufficiente dissipazione termica con un adeguato
montaggio del motore.
Per garantire la dissipazione del calore, per 3 superfici laterali va osservata una distanza
minima di 100 mm rispetto ai componenti attigui.
I dati nominali valgono solo se la temperatura ambiente non supera i 40 °C (104 °F) a
seguito delle condizioni di montaggio.
3.2
Grado di protezione
L'indicazione del grado di protezione secondo EN 60034-5 e IEC 60034-5 avviene con le
due lettere IP seguite da due cifre (p. es. IP64).
IP = International Protection
1. cifra = protezione contro i corpi estranei
2. cifra = protezione dall'acqua
Poiché nelle macchine utensili e nelle macchine transfer vengono per lo più utilizzati
refrigeranti oleosi e/o aggressivi, la sola protezione contro l'acqua non è sufficiente. I
servomotori vanno protetti con opportune coperture.
Quando si sceglie il grado di protezione del motore occorre prestare attenzione a
un'adeguata tenuta dell'albero motore.
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
47
Caratteristiche meccaniche dei motori
3.2 Grado di protezione
Tenuta dell'albero motore
Tabella 3- 1
Tenuta dell'albero motore
Grado di
protezione
secondo EN
60034-5
Tenuta dell'albero motore
realizzata mediante
Campo di impiego
IP64
Guarnizione di tenuta
Non è ammesso alcuna influenza dell'umidità
nella zona dell'albero e della flangia.
Nota:
Con IP64 sono ammessi flussi continui sulla
flangia.
L'uscita dell'albero non è a tenuta di polvere.
IP65
Anello di tenuta radiale dell'albero
senza molla anulare
Guarnizione sull'uscita dell'albero motore
contro spruzzi d'acqua e/o liquidi refrigeranti.
È consentito il funzionamento a secco
dell'anello di tenuta radiale. Durata ca. 25000
h (valore di riferimento).
Con IP65 non è ammessa alcuna presenza
costante di liquidi sulla flangia.
IP65, uscita
dell'albero IP67
Anello di tenuta radiale
In questa esecuzione l'uscita dell'albero e la
flangia sono realizzati con il grado di
protezione IP67. Il resto del motore ha il
grado di protezione IP65.
Per l'accoppiamento del riduttore (per i
riduttori non dotati di guarnizione) e la tenuta
ermetica contro l'olio.
Per garantire la sicurezza di funzionamento è
necessario che il labbro di tenuta venga
sufficientemente lubrificato e raffreddato
dall'olio del riduttore.
Durata circa 10000 h (valore di riferimento)
Se un anello di tenuta radiale dell'albero
funziona a secco, funzionalità e durata
vengono inevitabilmente danneggiate.
Motori sincroni 1FK7, generazione 2
48
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Caratteristiche meccaniche dei motori
3.3 Esecuzione dei cuscinetti
3.3
Esecuzione dei cuscinetti
I motori 1FK7 sono realizzati con cuscinetti a sfere scanalate con lubrificazione permanente.
Il cuscinetto fisso si trova sul lato DE.
3.4
Forze radiali e forze assiali
3.4.1
Calcolo della forza di tensionamento delle cinghie
FV [N] = 2 • M0 • c / dR
Tabella 3- 2
FV ≤ FR, amm
Spiegazione dei simboli della formula
Simboli della formula Unità
Descrizione
FV
N
Forza di pretensionamento
M0
Nm
Coppia da fermo del motore
c
–––
Fattore di pretensionamento; questo fattore è un valore empirico
dichiarato dal costruttore della cinghia. Si possono definire
questi valori:
per cinghie dentate: c = 1,5 ... 2,2
per cinghie piatte c = 2,2 ... 3,0
dR
m
Diametro della puleggia
FR, amm
N
Forza radiale ammessa
In caso di altri dimensionamenti si dovranno considerare le forze effettive derivanti dalla
coppia di trasmissione.
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
49
Caratteristiche meccaniche dei motori
3.4 Forze radiali e forze assiali
3.4.2
Sollecitazione per forze radiali
Punto di applicazione delle forze radiali FR sull'estremità dell'albero
● per le velocità medie di funzionamento
● per la durata nominale del cuscinetto (L10 h) di 25 000 h
)5
[
0D¡[
$EVWDQG]ZLVFKHQGHP$QJULIIVSXQNWGHU.UDIW)5XQGGHU:HOOHQVFKXOWHULQPP
'LPHQVLRQ[
'LVWDQFHEHWZHHQWKHSRLQWRIDSSOLFDWLRQRIWKHIRUFH)5DQGWKHVKDIWVKRXOGHULQPP
Figura 3-1
3.4.3
Punto di applicazione della forza sull'estremità dell'albero DE
Diagrammi delle forze radiali
Forza radiale 1FK7011
)5$6 >1@
Q PLQ
Q PLQ
Q PLQ
)RU]DUDGLDOHDPPHVVD
VXOO
DOEHUR
Q PLQ
Q PLQ
Q PLQ
Q PLQ
Figura 3-2
[>PP@
Forza radiale FR alla distanza x dallo spallamento dell'albero con durata nominale del
cuscinetto di 25000 h
Motori sincroni 1FK7, generazione 2
50
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Caratteristiche meccaniche dei motori
3.4 Forze radiali e forze assiali
Forza radiale 1FK7015
) 5$6 >1@
)RU]DUDGLDOHDPPHVVD
VXOO
DOEHUR
Q PLQ
Q PLQ
Q PLQ
Q PLQ
Q PLQ
Q PLQ
Q PLQ
Figura 3-3
[>PP@
Forza radiale FR alla distanza x dallo spallamento dell'albero con durata nominale del
cuscinetto di 25000 h
Forza radiale 1FK702
)5$6 >1@
Q PLQ
Q PLQ
)RU]DUDGLDOHDPPHVVD
VXOO
DOEHUR
Q PLQ
Q PLQ
Q PLQ
Q PLQ
Q PLQ
Q PLQ
[>PP@
Figura 3-4
Forza radiale FR alla distanza x dallo spallamento dell'albero con durata nominale del
cuscinetto di 25000 h
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
51
Caratteristiche meccaniche dei motori
3.4 Forze radiali e forze assiali
Forza radiale 1FK703
)5$6 >1@
Q PLQ
)RU]DUDGLDOHDPPHVVD
VXOO
DOEHUR
Q PLQ
Q PLQ
Q PLQ
Q
Q
Q
Q
Q
PLQ
PLQ
PLQ
PLQ
PLQ
[>PP@
Figura 3-5
Forza radiale FR alla distanza x dallo spallamento dell'albero con durata nominale del
cuscinetto di 25000 h
Forza radiale 1FK704
)5$6 >1@
Q PLQ
Q
Q
Q
Q
Q
Q
PLQ
PLQ
PLQ
PLQ
PLQ
PLQ
Figura 3-6
[>PP@
Forza radiale FR alla distanza x dallo spallamento dell'albero con durata nominale del
cuscinetto di 25000 h
Motori sincroni 1FK7, generazione 2
52
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Caratteristiche meccaniche dei motori
3.4 Forze radiali e forze assiali
Forza radiale 1FK706
)5$6 >1@
Q PLQ
Q PLQ
Q PLQ
Q PLQ
Q PLQ
Q PLQ
[>PP@
Figura 3-7
Forza radiale FR alla distanza x dallo spallamento dell'albero con durata nominale del
cuscinetto di 25000 h
Forza radiale 1FK708
)5$6 >1@
Q PLQ
Q PLQ
Q
Q
Q
Q
[>PP@
Figura 3-8
PLQ
PLQ
PLQ
PLQ
Forza radiale FR alla distanza x dallo spallamento dell'albero con durata nominale del
cuscinetto di 25000 h
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
53
Caratteristiche meccaniche dei motori
3.4 Forze radiali e forze assiali
Forza radiale 1FK710
)5$6 >1@
Q PLQ
Q PLQ
Q
Q
Q
Q
[>PP@
Figura 3-9
3.4.4
PLQ
PLQ
PLQ
PLQ
Forza radiale FR alla distanza x dallo spallamento dell'albero con durata nominale del
cuscinetto di 25000 h
Sollecitazione assiale
In caso di impiego ad es. di ingranaggi a denti obliqui come elemento di azionamento, oltre
alla forza radiale sul cuscinetto del motore agisce anche una forza assiale. In presenza di
forze assiali può essere superata la taratura della molla del cuscinetto, in modo tale che il
rotore si sposti in corrispondenza del gioco assiale del cuscinetto presente.
Altezza d'asse
Traslazione
36 e 48
circa 0,2 mm
63 ... 100
circa 0,35 mm
Non è consentita una forza assiale di dimensioni della taratura della molla (100 ... 500 N).
Un cuscinetto non pretensionato provoca un guasto precoce.
Calcolo delle forze assiali ammesse: FA = FR ● 0,35
AVVERTENZA
Motori con freno di stazionamento integrato
Per i motori con freno di stazionamento integrato non è ammessa alcuna forza assiale!
Motori sincroni 1FK7, generazione 2
54
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Caratteristiche meccaniche dei motori
3.5 Concentricità, coassialità e planarità
3.5
Concentricità, coassialità e planarità
La precisione dell'albero e della flangia è verificata secondo DIN 42955, IEC 60072-1. Dati
diversi dai valori qui indicati sono riportati nei disegni quotati.
Tabella 3- 3
Tolleranza di concentricità dell'albero rispetto all'asse della custodia (riferita alle
estremità d'albero cilindriche)
Altezza d'asse
Motore
Standard N
20
1FK701
0,03 mm
28
1FK702
0,03 mm
36
1FK703
0,035 mm
48, 63
1FK704/1FK706
0,04 mm
80, 100
1FK708/1FK710
0,05 mm
&RPSDULPHWUR
$OEHURPRWRUH
/
/
0RWRUH
Figura 3-10
Controllo concentricità
Tabella 3- 4
Tolleranza della coassialità e della planarità della superficie della flangia rispetto all'asse
d'albero (riferita al diametro di centraggio della flangia di fissaggio)
Altezza d'asse
Motore
Standard N
20
1FK701
0,06 mm
28
1FK702
0,08 mm
36, 48
1FK703/1FK704
0,08 mm
63, 80, 100
1FK706/1FK708/1FK710
0,1 mm
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
55
Caratteristiche meccaniche dei motori
3.6 Estremità dell'albero
$OEHURPRWRUH
9HULILFD&RDVVLDOLW¢
PP
&RPSDULPHWUR
0RWRUH
$OEHURPRWRUH
9HULILFD3ODQDULW¢
PP
&RPSDULPHWUR
0RWRUH
Figura 3-11
3.6
Controllo coassialità ed planarità
Estremità dell'albero
L'estremità dell'albero sul lato DE è realizzata in modo cilindrico secondo DIN 748 parte 3,
IEC 60072-1. Per rapidi processi di accelerazione e funzionamento reversibile è preferibile
optare per un accoppiamento dinamico albero-mozzo.
Standard: Albero liscio
Opzione: Chiavetta e relativa gola (equilibratura con mezza chiavetta)
3.7
Equilibratura
I motori vengono equilibrati secondo DIN ISO 8821.
I motori con chiavetta nell'albero sono equilibrati con mezza chiavetta. Negli elementi di
azionamento tenere conto dell'equilibratura delle masse della metà chiavetta anteriore.
Motori sincroni 1FK7, generazione 2
56
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Caratteristiche meccaniche dei motori
3.8 Grado di vibrazione
3.8
Grado di vibrazione
I motori con cava della chiavetta sono equilibrati dal costruttore con metà chiavetta. Il
comportamento alle vibrazioni del sistema nel luogo di installazione dipende dagli elementi
condotti, dalle condizioni di montaggio, dall'installazione e dalle vibrazioni esterne. I valori di
vibrazione del motore possono pertanto variare.
I motori soddisfano un grado di vibrazione di livello A secondo EN 60034-14 (IEC 60034-14).
I valori indicati si riferiscono solo al motore. Le vibrazioni del sistema dovute all'installazione
possono causare un aumento di questi valori per il motore.
Il livello del grado di vibrazione viene rispettato fino alla velocità nominale (nN).
YHIIDPP >PPV@
/LYHOOR$
Figura 3-12
3.9
Q>JLULPLQ@
Livelli di vibrazione
Emissione di rumori
I motori della serie 1FK7 possono raggiungere, funzionando a regimi da 0 fino alla velocità
nominale /min, il seguente livello di pressione acustica per superficie di misura Lp(A):
Tabella 3- 5
Livello di pressione acustica
Altezza d'asse
Livello di pressione sonora sulla superficie di misura
Lp(A)
1FK701 ... 1FK704
55 dB(A) + 3 dB di tolleranza
1FK706
65 dB(A) + 3 dB di tolleranza
1FK708 ... 1FK710
70 dB(A) + 3 dB di tolleranza
I motori sono omologati per ampi campi di condizioni di funzionamento e di installazione.
Queste condizioni, come ad es. la realizzazione del basamento rigido o antivibrazioni,
influenzano talvolta in modo molto marcato l'emissione di rumori.
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
57
Caratteristiche meccaniche dei motori
3.10 Verniciatura
3.10
Verniciatura
Se non viene scelto un colore speciale, i motori della serie 1FK7 vengono verniciati con il
colore standard antracite (RAL 7016).
Tabella 3- 6
Sigle dei colori speciali (opzione)
Denominazione
Sigla
RAL 9005, verde scuro 1)
X01
RAL 9001, bianco crema
1)
RAL 6011, verde reseda
1)
X02
X03
RAL 7032, grigio pietra 1)
X04
RAL 5015, celeste 1)
X05
RAL 1015, avorio 1)
X06
RAL 9006, bianco alluminio (colore idoneo all'uso alimentare)
RAL 9023, grigio perla scuro
1)
X08
X27
1)
Verniciatura speciale per il gruppo climatico Worldwide:
mano di fondo e verniciatura antracite RAL 7016 1)
K23
Verniciatura speciale per il gruppo climatico Worldwide:
mano di fondo e altra verniciatura a scelta tra X01 - X27 2)
K23+X...
Mano di fondo (senza verniciatura)
K24
1) Per la verniciatura i motori 1FK701 e 1FK702 devono essere ordinati specificando 3 o 5 alla 16ª
posizione del numero di ordinazione.
2) Per la mano di fondo i motori 1FK702 devono essere ordinati specificando 0 o 2 alla 16ª posizione
del numero di ordinazione.
Motori sincroni 1FK7, generazione 2
58
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
4
Dati tecnici e curve caratteristiche
4.1
Range operativo e caratteristica
Range operativo consentito
Il range operativo consentito è limitato da fattori termici, meccanici ed elettromagnetici. I dati
forniti nella presente documentazione sono validi per motori autoraffreddati fino a una
temperatura ambiente di 40 °C.
Il surriscaldamento del motore è causato dalle perdite che si verificano nel motore stesso
(perdite dovute alla corrente, perdite di ferro, perdite per attrito). L'utilizzo del motore è legato
al tipo di raffreddamento (naturale, a ventilazione forzata, ad acqua). Per rispettare i limiti di
temperatura, la coppia consentita diminuisce a partire dalla coppia da fermo M0 con
l'aumento del numero di giri.
Campo di temperatura consentito, curve caratteristiche S1(100 K) e S1(60 K)
I motori 1FK7 possono essere utilizzati fino a una temperatura media dell'avvolgimento di
145 °C.
&XUYDFDUDWWHULVWLFDOLPLWHGLWHQVLRQH
VHQ]DGHIOXVVDJJLRGHOFDPSR
0>1P@
0 PD[
&XUYDFDUDWWHULVWLFDOLPLWHGLWHQVLRQH
FRQGHIOXVVDJJLRGHOFDPSR
Q PD[PHFF
0 PD[ ,QY
VHQ]DGHIOXVVDJJLRGHO
FDPSR
6
6
6
&DPSRGLGHIOXVVDJJLR
6.
6.
Q PD[,QY
9HORFLW¢PRWRUH>JLULPLQ@
Figura 4-1
Caratteristica di coppia dei motori sincroni
Per il funzionamento continuo i valori limite di questo campo di temperatura consentito
vengono rappresentati attraverso la curva caratteristica S1 "100 K". Ciò corrisponde a un
utilizzo secondo la classe termica 155 (F).
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
59
Dati tecnici e curve caratteristiche
4.1 Range operativo e caratteristica
Se è necessaria una classe termica inferiore, ad es.
● la temperatura della carcassa deve stare per motivi di sicurezza sotto i 90 °C
● se il riscaldamento del motore ha effetti negativi sulla macchina
è possibile scegliere la curva caratteristica S1 "60 K". In questo caso, il motore presenta la
classe termica 130 (B).
CAUTELA
Un servizio continuo nel campo al di sopra della curva caratteristica S1 non è ammissibile
termicamente per il motore.
Funzionamento intermittente periodico, curve caratteristiche S325%/40%/60% e Mmax
Nel funzionamento intermittente periodico, in base alla durata di inserzione il motore può
essere sottoposto a carico maggiore (vedere anche il capitolo "Progettazione"). Sono valide
le curve caratteristiche S3 contrassegnate con la relativa durata di inserzione (25%, 40% e
60%).
Il tempo di ciclo corrisponde solitamente a 10 minuti. La sovratemperatura corrisponde a 100
K.
Diversamente da quanto detto, per dimensioni ridotte dei motori viene indicato un tempo di
ciclo di 1 minuto e annotato nelle curve caratteristiche. È disponibile un'elevata
sovraccaricabilità di breve durata fino alla curva caratteristica Mmax in tutto il campo di
regolazione della velocità.
Motor Module consigliato
Nel capitolo "Prospetto dei motori/assegnazione Motor Module", per ciascun motore viene
consigliato, in base alla corrente da fermo, un Motor Module. La coppia massima così
ottenibile è rappresentata nella curva caratteristica Mmax Inv.
Durante la progettazione del funzionamento intermittente o in sovraccarico occorre verificare
se sia eventualmente necessario un Motor Module superiore per mettere a disposizione la
corrente di picco richiesta.
Limiti di velocità nmax mecc e nmax Inv
Il campo di velocità viene limitato dalla velocità limite meccanica nmax mecc (forze centrifughe
sul rotore, durata del cuscinetto) oppure dalla velocità limite elettrica nmax Inv (resistenza alla
tensione del convertitore e/o frequenza max. del convertitore).
Motori sincroni 1FK7, generazione 2
60
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.1 Range operativo e caratteristica
Per questo la velocità massima consentita nmax risulta essere il valore minimo di nmax mecc e
nmax Inv.
CAUTELA
La velocità massima consentita (a livello meccanico) nmax mecc non deve essere superata.
CAUTELA
Il funzionamento del motore (come motore o azionato dall'esterno) con velocità superiori a
nmax Inv può indurre eventualmente nell'avvolgimento una tensione superiore a quella
consentita sul convertitore. Questo potrebbe danneggiare irrimediabilmente il convertitore.
Pertanto non è consentito il funzionamento al di sopra della velocità nmax Inv senza che siano
state intraprese misure supplementari o di protezione. Siemens AG non si assume alcuna
responsabilità per eventuali danni verificatisi a causa della mancata osservanza della
suddetta indicazione di pericolo.
Limite di coppia in caso di funzionamento con SINAMICS S110 / S120 con deflussaggio del campo.
Nel sistema di azionamento SINAMICS S110 / S120 la funzione di deflussaggio è
normalmente attiva. Una corrente a deflussaggio di campo viene impressa in modo tale da
consentire un funzionamento a destra o al di sopra della curva caratteristica limite di
tensione. L'andamento della curva caratteristica limite in caso di deflussaggio è determinato
dall'esecuzione dell'avvolgimento (circuito d'armatura) e dall'entità della tensione di uscita
del convertitore.
&XUYDFDUDWWHULVWLFDOLPLWHGLWHQVLRQH
VHQ]DGHIOXVVDJJLRGHOFDPSR
0>1P@
0 PD[
&XUYDFDUDWWHULVWLFDOLPLWHGLWHQVLRQH
FRQGHIOXVVDJJLRGHOFDPSR
Q PD[PHFF
0 PD[ ,QY
VHQ]DGHIOXVVDJJLRGHO
FDPSR
6
6
6
6.
6.
&DPSRGLGHIOXVVDJJLR
Q PD[,QY
9HORFLW¢PRWRUH>JLULPLQ@
Figura 4-2
Andamento della caratteristica limite di tensione con/senza deflussaggio
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
61
Dati tecnici e curve caratteristiche
4.1 Range operativo e caratteristica
La rappresentazione delle curve caratteristiche viene effettuata per ogni esecuzione
dell'avvolgimento in un apposito foglio dati. A ogni foglio dati sono poi assegnati i diagrammi
coppia-giri per le diverse tensioni di uscita del convertitore:
Tabella 4- 1
Tensioni di uscita del convertitore
Sistema di azionamento
Modulo di
alimentazione
Tensione di rete
Tensione del
circuito intermedio
Tensione di
uscita
Urete
UCI
Umot
SINAMICS S110 / S120
3 AC 380 - 480 V
ALM
ALM
SLM
SLM
400 V
480 V
400 V
480 V
600 V
720 V
540 V
650 V
425 V
510 V
380 V
460 V
SINAMICS S110 / S120
1 AC 230 V
Dispositivo
AC/AC
230 V
300 V
180 V
Limite di coppia per il funzionamento con SINAMICS S110 / S120 senza deflussaggio del campo.
Con il sistema di azionamento SINAMICS S110 / S120 sussiste la possibilità di disattivare la
funzione di deflussaggio del campo. Ciò riduce il range operativo disponibile.
L'andamento della caratteristica del limite della tensione è determinato dall'esecuzione
dell'avvolgimento (circuito d'armatura) e dall'entità della tensione di uscita del convertitore.
Con l'aumento della velocità aumenta la tensione indotta nell'avvolgimento del motore. Per
imprimere la corrente si ha a disposizione la differenza della tensione del circuito intermedio
del convertitore rispetto alla tensione indotta del motore.
Ciò limita l'intensità della corrente imprimibile. In questo modo, a velocità elevate la coppia
diminuisce rapidamente. Tutti i punti di funzionamento raggiungibili a livello di motore si
trovano a sinistra della caratteristica limite di tensione rappresentata con tratteggio.
La rappresentazione delle curve caratteristiche viene effettuata per ogni esecuzione
dell'avvolgimento in un apposito foglio dati. A ogni foglio dati sono poi assegnati i diagrammi
coppia-giri per le diverse tensioni di uscita del convertitore:
Tabella 4- 2
Tensioni di uscita del convertitore
Sistema di azionamento
Modulo di
alimentazione
Tensione di rete
Tensione del
circuito intermedio
Tensione di
uscita
Urete
UCI
Umot
SINAMICS S110 / S120
3 AC 380 - 480 V
ALM
ALM
SLM
SLM
400 V
480 V
400 V
480 V
600 V
720 V
540 V
650 V
425 V
510 V
380 V
460 V
SINAMICS S110 / S120
1 AC 230 V
Dispositivo
AC/AC
230 V
300 V
180 V
In caso di tensioni di uscita del convertitore con valori differenti, la curva caratteristica limite
di tensione deve essere spostata di conseguenza. Vedere "Traslazione della curva
caratteristica limite di tensione".
Motori sincroni 1FK7, generazione 2
62
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.1 Range operativo e caratteristica
Esecuzioni dell'avvolgimento
Nell'ambito della grandezza costruttiva di un motore sono possibili varie esecuzioni
dell'avvolgimento (circuiti d'armatura) per diverse velocità nominali nN.
Tabella 4- 3
Lettere di identificazione per l'esecuzione dell'avvolgimento
Velocità nominale nN
Esecuzione dell'avvolgimento
[1/min]
(10. Posizione del numero di ordinazione)
2000
C
3000
F
4500
H
6000
K
0>1P@
0 PD[
&
)
+
.
0 ,QYPD[
0. . 0
&XUYDFDUDWWHULVWLFDGHOOLPLWHGLWHQVLRQH OLPLWHGLFRSSLDVHQ]DGHIOXVVDJJLRDGHV
SHUHVHFX]LRQHGHOO
DYYROJLPHQWR.
6
6
6
6.
6.
Q>PLQ@
Figura 4-3
Diagramma coppia/numero di giri
Nota
La caratteristica del limite di tensione di un motore con velocità nominale pari a 6000 1/min
si trova molto al di sopra di quella di un motore dello stesso tipo con una velocità nominale
pari a 2000 1/min. Tuttavia questo motore necessita, per la stessa coppia nominale, di una
corrente decisamente superiore.
Per questo è opportuno scegliere la velocità nominale in modo tale che essa non sia di molto
superiore alla velocità massima indispensabile per le operazioni da eseguirsi.
In questo modo è possibile ridurre al minimo le dimensioni del Motor Module (corrente di
uscita).
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
63
Dati tecnici e curve caratteristiche
4.1 Range operativo e caratteristica
Traslazione della caratteristica del limite di tensione (rilevante solo con deflussaggio disattivato)
ATTENZIONE
Una traslazione della caratteristica del limite di tensione può essere applicata solo con
caratteristiche di limite approssimativamente lineari. Una traslazione della curva del limite di
tensione è possibile solo se viene soddisfatta la condizione Umot, nuova > UiN.
La tensione indotta UiN è indicata sulla targhetta dei dati del motore (targhetta identificativa)
oppure può essere ricavata dalla formula seguente: UiN = kE ∙ nN / 1000
Per conoscere i limiti del motore con una tensione di uscita del convertitore (Umot) diversa da
380 V, 425 V, 460 V o 510 V, la relativa curva caratteristica limite di tensione tracciata deve
essere traslata per la corrispettiva nuova tensione di uscita (Umot, nuova).
L'entità dello spostamento si ricava come descritto qui di seguito:
sull'asse X (velocità) si ricava con una tensione di uscita di Umot, nuova una traslazione del
fattore:
8PRWQXRYD
Umot, nuova =
nuova tensione di uscita del convertitore
Umot
Tensione di uscita del convertitore dalla curva caratteristica per
380 V, 425 V, 460 V o 510 V
8PRW
=
Calcolo della nuova coppia limite con una nuova curva limite
0>1P@
&DUDWWHULVWLFDGHOOLPLWHGLWHQVLRQHSHU8PRWQXRYR
&DUDWWHULVWLFDGHOOLPLWHGLWHQVLRQHSHU8PRW
3
0OLPLWH
3
0OLPLWHQXRYR
Q>PLQ@
Q1
3 Q
3 Q
Motori sincroni 1FK7, generazione 2
64
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.1 Range operativo e caratteristica
P1
Punto di intersezione della caratteristica limite di tensione sull'asse x: calcolare i giri n1
8 0RW
Q>PLQ@
P2
N ( ವ ವ Intersezione della nuova caratteristica limite di tensione sull'asse x; calcolare i giri n2
Q>JLULPLQ@
Q ವ
8 0RWQXRYR
8 0RW
P3
Tracciare per nN una riga perpendicolare verso l'alto fino alla curva caratteristica limite
di tensione. Questa intersezione è il punto P3. Leggere a sinistra il valore Mlimite.
P4
Per determinare P4 si deve prima calcolare Mlimite, nuovo.
0/LPLWHQXRYR
80RWQXRYR 8L1
80RW 8L1
ವ 0/LPLWH
P4 è l'intersezione di Mlimite, nuovo e nN. Collegando i punto P2 e P4 si ottiene la nuova curva
caratteristica di tensione.
Esempio di traslazione della caratteristica del limite di tensione senza deflussaggio del campo
Motore 1FT7032-5AF71; nN = 6000 1/min; kE = 45 V/1000 min-1
Umot nuova = 290 V; calcolo con Umot = 425 V
UiN = kE ∙ nN/1000; UiN = 45 ∙ 6000/1000 = 270 V
Condizione: Umot, nuova > UiN è soddisfatta.
&DOFROR3
Q ವ PLQ
ವ &DOFROR3
Q ವ PLQ PLQ
PLQ
/HJJHUH
&DOFROR3
0limite per nN PLQH9FLUFD1P
&DOFROR3
0OLPLWHQXRYR
ವ 1P 1P
Inserire i punti P2 e P4 e collegarli. Questa linea è la nuova curva caratteristica limite di
tensione per Umot nuova = 290 V.
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
65
Dati tecnici e curve caratteristiche
4.1 Range operativo e caratteristica
Caratteristica M/I tipica
A causa degli effetti di saturazione (in particolare in presenza di correnti elevate), la coppia
raggiungibile non può essere calcolata in maniera lineare dalla corrente lineare.
0
0 .
EHVWFDVH
ZRUVWFDVH
Figura 4-4
,
, .
Andamento caratteristico della curva caratteristica coppia-corrente per motori a
raffreddamento naturale
A partire da M0 (oppure I0) è possibile utilizzare la formula seguente per il rilevamento della
coppia o della costante di coppia, in funzione della corrente:
,, 0
0
෬
N,
, 7
,
,
, PD[ , 0PD[
, PD[
0
,
Valori di tolleranza
I dati caratteristici riportati nei fogli dati sono valori nominali soggetti a una dispersione
naturale. Sono valide le seguenti tolleranze:
Tabella 4- 4
Valori di tolleranza dei dati motore
Dati motore
Valore tipico
Valore max.
± 7,5 %
Corrente da fermo
I0
±3%
Costante di tempo elettrica
Tel
±5%
± 10 %
Costante di coppia
kT
±3%
± 7,5 %
Costante di tensione
kE
±3%
± 7,5 %
Resistenza dell'avvolgimento
Rfase
±5%
± 10 %
Coppia d'inerzia delle masse
Jmot
±2%
± 10 %
Motori sincroni 1FK7, generazione 2
66
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.1 Range operativo e caratteristica
Effetti dell'influsso della temperatura e della dispersione dei parametri sulla curva caratteristica
Le curve caratteristiche coppia-velocità descritte nel capitolo seguente si riferiscono ai valori
nominali in condizioni di temperatura di esercizio (rappresentati nella figura seguente come
curva caratteristica 3).
/HFXUYHFDUDWWHULVWLFKHUDSSUHVHQWDWHLQTXHVWDGRFXPHQWD]LRQH
YDOJRQRSHUXQPRWRUHJL¢FDOGRHFRQGDWLQRPLQDOLFDVR
N(HN7OLPLWLGLWROOHUDQ]DVXSHULRULYDORUHQRPLQDOHDIUHGGR
N(HN7YDORUHQRPLQDOHDIUHGGR
N(HN7YDORUHQRPLQDOHDFDOGR
N(HN7OLPLWLGLWROOHUDQ]DLQIHULRULYDORUHQRPLQDOHDFDOGR
0>1P@
FRQGHIOXVVDJJLRGHOFDPSR
VHQ]DGHIOXVVDJJLRGHOFDPSR
Q>JLULPLQ@
Figura 4-5
'LVSHUVLRQHWLSLFD
7ROOHUDQ]HPDVVLPH
Effetto della dispersione
ATTENZIONE
La temperatura del motore provoca una chiara traslazione della curva caratteristica limite di
tensione nel campo di velocità superiore. Di questo va tenuto conto durante la
progettazione (in particolare nelle applicazioni in cui il motore a freddo deve fornire le
velocità più elevate) con sistemi convertitore senza deflussaggio del campo.
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
67
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
4.2
Curve caratteristiche velocità/coppia
Nelle tabelle sono descritti i dati tecnici di ciascuna versione del motore attraverso i punti di
misurazione.
Questi punti di misurazione corrispondono anche ai dati che sono stampati sulla targhetta
dei dati del motore e anche ai dati che sono elencati nei Cataloghi PM 21 o NC 61 per i dati
di selezione e ordinazione.
4.2.1
Motori 1FK7 su SINAMICS S110 / S120 con tensione di rete 3 AC 380 V ... 480
V
4.2.1.1
1FK7 Compact
Tabella 4- 5
1FK7011 Compact
Dati tecnici
Abbreviazione
Unità
–5AK71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
6000
0,08
0,85
0,18
1,5
0,15
1,2
nopt
Popt
1/min
kW
5000
0,06
nmax mecc
Mmax
Imax
1/min
Nm
A
8000
0,5
4,2
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
8
0,12
8,0
3,0
4,2
1,4
4
14
0,0064·10-3
1400
0,9
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
0,0083·10-3
1400
1,0
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motori sincroni 1FK7, generazione 2
68
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Dati tecnici
Abbreviazione
Unità
–5AK71
A
A
Nm
1/min
3
6
0,5
8000
Motor Module consigliato 6SL312⃞-⃞TE13-0AA⃞
IN Inv
Imax Inv
Mmax Inv
nmax Inv
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
).$.
>DEF@
0BPD[
0>1P@
6PLQ
6PLQ
6PLQ
6.
6.
[a]
Q>USP@
SINAMICS SLM 400 V
[b]
SINAMICS ALM 400 V
[c]
SINAMICS SLM 480 V
Figura 4-6
1FK7011-5AK71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
69
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 6
1FK7015 Compact
Dati tecnici
Abbreviazione
Unità
–5AK71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
6000
0,16
0,85
0,35
1,5
0,29
1,2
nopt
Popt
1/min
kW
5000
0,12
nmax mecc
Mmax
Imax
1/min
Nm
A
8000
1,0
4,2
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
8
0,24
16,0
4,3
8,4
2
1,9
16
0,0083·10-3
1300
1,1
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
0,0102·10-3
1300
1,2
A
A
Nm
1/min
3
6
1,0
8000
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE13-0AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
70
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
).$.
>DEF@
0BPD[
0>1P@
6PLQ
6PLQ
6PLQ
6.
6.
[a]
Q>USP@
SINAMICS SLM 400 V
[b]
SINAMICS ALM 400 V
[c]
SINAMICS SLM 480 V
Figura 4-7
1FK7015-5AK71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
71
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 7
1FK7022 Compact
Dati tecnici
Abbreviazione
Unità
–5AK71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K))
1/min
Nm
A
Nm
A
Nm
A
6000
0,60
1,4
0,85
1,8
0,70
1,5
nopt
Popt
1/min
kW
6000
0,38
nmax mecc
Mmax
Imax
1/min
Nm
A
10000
3,4
8,0
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
6
0,46
29,0
4,2
9,1
2,2
1,7
18
0,028·10-3
3000
1,8
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
0,035·10-3
3000
2,0
A
A
Nm
1/min
3
6
2,65
10000
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE13-0AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
72
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
).$.
0BPD[
QBPD[
0>1P@
0BPD[,QY
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
).$.
0BPD[
QBPD[
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
0>1P@
0BPD[,QY
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-8
1FK7022-5AK71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
73
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 8
1FK7032 Compact
Dati tecnici
Abbreviazione
Unità
–2AK71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
6000
0,8
1,3
1,15
1,7
0,95
1,4
nopt
Popt
1/min
kW
6000
0,5
nmax mecc
Mmax
Imax
1/min
Nm
A
10000
4,5
7,0
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
6
0,67
45,0
5,05
17,3
3,45
2,20
25
0,065·10-3
6000
2,7
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
0,075·10-3
4100
3,1
A
A
Nm
1/min
3
6
4,15
10000
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE13-0AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
74
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
QBPD[BPHFK
).$.
0BPD[
0BPD[,QY
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
).$.
0BPD[
0BPD[,QY
QBPD[BPHFK
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-9
1FK7032-2AK71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
75
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 9
1FK7034 Compact
Dati tecnici
Abbreviazione
Unità
–2AK71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
6000
1,0
1,3
1,6
1,9
1,35
1,55
nopt
Popt
1/min
kW
6000
0,63
nmax mecc
Mmax
Imax
1/min
Nm
A
10000
6,5
8,0
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
6
0,84
55,0
4,46
17,2
3,85
1,71
30
0,09·10-3
5300
3,5
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
0,10·10-3
3750
3,9
A
A
Nm
1/min
3
6
4,95
10000
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE13-0AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
76
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
0BPD[
).$.
0BPD[,QY
0>1P@
QBPD[BPHFK
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
0BPD[
).$.
0BPD[,QY
0>1P@
QBPD[BPHFK
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-10
1FK7034-2AK71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
77
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 10 1FK7040 Compact
Dati tecnici
Abbreviazione
Unità
–2AK71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
6000
1,1
1,85
1,6
2,35
1,3
1,9
nopt
Popt
1/min
kW
6000
0,69
nmax mecc
Mmax
Imax
1/min
Nm
A
9000
5,1
7,7
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
8
0,68
43,4
2,87
16,5
5,7
3,0
25
0,16·10-3
18700
3,2
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
0,192·10-3
13000
3,9
A
A
Nm
1/min
3
6
4,0
9000
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE13-0AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
78
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
).$.
0BPD[
0BPD[,QY
QBPD[BPHFK
0>1P@
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
).$.
0BPD[
QBPD[BPHFK
0BPD[,QY
0>1P@
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-11
1FK7040-2AK71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
79
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 11 1FK7042 Compact
Dati tecnici
Abbreviazione
Unità
–2AC71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
2000
2,8
1,55
3,0
1,6
2,5
1,3
nopt
Popt
1/min
kW
2000
0,59
nmax mecc
Mmax
Imax
1/min
Nm
A
9000
10,5
5,6
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
8
1,865
122,0
8,6
64
7,4
2,15
30
0,29·10-3
15500
4,6
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
0,32·10-3
11400
5,3
A
A
Nm
1/min
3
6
10,5
4750
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE13-0AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
80
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
).$&
0BPD[
0BPD[,QY
0>1P@
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
).$&
0BPD[
0BPD[,QY
0>1P@
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
6PLQ
6.
6PLQV
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-12
1FK7042-2AC71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
81
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 12 1FK7042 Compact
Dati tecnici
Abbreviazione
Unità
–2AF71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
3000
2,6
2,0
3,0
2,2
2,5
1,8
nopt
Popt
1/min
kW
3000
0,82
nmax mecc
Mmax
Imax
1/min
Nm
A
9000
10,5
7,6
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
8
1,375
90,0
4,67
35,0
7,5
2,15
30
0,29·10-3
15500
4,6
Jmot fr
ct
mmot fr
kgm2
Nm/rad
kg
0,32·10-3
11400
5,3
A
A
Nm
1/min
3
6
8,2
6400
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia d'inerzia con freno
Rigidità torsionale
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE13-0AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
82
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
0BPD[
).$)
0BPD[,QY
0>1P@
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
0BPD[
).$)
0BPD[,QY
0>1P@
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
6.
6PLQ
6PLQ
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-13
1FK7042-2AF71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
83
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 13 1FK7042 Compact
Dati tecnici
Abbreviazione
Unità
–2AK71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
6000
1,5
2,5
3,0
4,4
2,5
3,55
nopt
Popt
1/min
kW
5000
1,02
nmax mecc
Mmax
Imax
1/min
Nm
A
9000
10,5
15,3
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
8
0,68
44,5
1,145
8,6
7,5
2,15
30
0,29·10-3
15500
4,6
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
0,32·10-3
11400
5,3
A
A
Nm
1/min
5
10
6,8
9000
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE13-0AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
84
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
0BPD[
).$.
QBPD[BPHFK
0>1P@
0BPD[,QY
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
6PLQ
6.
6PLQ
6.
n [rpm]
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
).$.
0BPD[
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
QBPD[BPHFK
0>1P@
0BPD[,QY
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-14
1FK7042-2AK71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
85
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 14 1FK7060 Compact
Dati tecnici
Abbreviazione
Unità
–2AC71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
2000
5.3
2.95
6.0
3.15
5.0
2.55
nopt
Popt
1/min
kW
2000
1.11
nmax mecc
Mmax
Imax
1/min
Nm
A
7200
18.0
10.7
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
8
1.905
121.0
2.75
30.5
11.1
1.75
30
0.77·10-3
40500
7.1
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
0.87·10-3
28500
8.5
A
A
Nm
1/min
3
6
11.4
4750
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE13-0AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
86
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
0BPD[
).$&
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
0BPD[,QY
6PLQ
6PLQ
6.
6PLQ
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
0BPD[
).$&
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
0BPD[,QY
6PLQ
6PLQ
6.
6PLQ
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-15
1FK7060-2AC71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
87
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 15 1FK7060 Compact
Dati tecnici
Abbreviazione
Unità
–2AF71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
3000
4.7
3.7
6.0
4.45
5.0
3.6
nopt
Popt
1/min
kW
3000
1.48
nmax mecc
Mmax
Imax
1/min
Nm
A
7200
18.0
15.0
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
8
1.33
85.5
1.35
15.2
11.3
1.71
30
0.77·10-3
40500
7.1
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
0.87·10-3
28500
8.5
A
A
Nm
1/min
5
10
13.2
6700
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE15-0AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
88
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
0BPD[
).$)
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
0BPD[,QY
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
0BPD[
).$)
0>1P@
0BPD[,QY
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-16
1FK7060-2AF71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
89
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 16 1FK7060 Compact
Dati tecnici
Abbreviazione
Unità
–2AH71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
4500
3.7
4.3
6.0
6.3
5.0
5.1
nopt
Popt
1/min
kW
4500
1.74
nmax mecc
Mmax
Imax
1/min
Nm
A
7200
18.0
21.5
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
8
0.95
60.5
0.695
7.6
10.9
1.78
30
0.77·10-3
40500
7.1
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
0.87·10-3
28500
8.5
A
A
Nm
1/min
9
18
15.8
7200
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE13-0AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
90
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
).$+
0BPD[,QY
QBPD[BPHFK
0BPD[
0>1P@
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
).$+
0BPD[
0BPD[,QY
QBPD[BPHFK
0>1P@
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
6PLQ
6.
6PLQ
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-17
1FK7060-2AH71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
91
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 17 1FK7062 Compact
Dati tecnici
Abbreviazione
Unità
–2AC71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
2000
7.0
2.65
8.5
3.0
7.1
2.45
nopt
Popt
1/min
kW
2000
1.34
nmax mecc
Mmax
Imax
1/min
Nm
A
7200
26.0
10.9
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
8
2.83
180.5
3.59
45.5
12.7
1.51
35
1.12·10-3
37000
9.1
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
122·10-3
26500
10.5
A
A
Nm
1/min
3
6
17.0
3200
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE13-0AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
92
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
).$&
0BPD[
QBPD[B,QY
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
0BPD[,QY
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
).$&
QBPD[B,QY
0BPD[
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
0BPD[,QY
6PLQ
6PLQ
6.
6PLQ
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-18
1FK7062-2AC71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
93
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 18 1FK7062 Compact
Dati tecnici
Abbreviazione
Unità
–2AF71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
3000
6.0
4.0
8.5
5.3
7.1
4.3
nopt
Popt
1/min
kW
3000
1.6
nmax mecc
Mmax
Imax
1/min
Nm
A
7200
26.0
19.2
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
8
1.605
102.5
1.145
14.6
12.8
1.49
35
1.12·10-3
37000
9.1
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
1.22·10-3
26500
10,5
A
A
Nm
1/min
5
10
16.0
5600
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE15-0AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
94
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
).$)
0BPD[
QBPD[B,QY
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
0BPD[,QY
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
).$)
QBPD[B,QY
0BPD[
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
0BPD[,QY
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-19
1FK7062-2AF71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
95
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 19 1FK7062 Compact
Dati tecnici
Abbreviazione
Unità
–2AH71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
4500
3.0
3.3
8.5
8.0
7.1
6.5
nopt
Popt
1/min
kW
3500
1.95
nmax mecc
Mmax
Imax
1/min
Nm
A
7200
26.0
29.0
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
8
1.065
67.5
0.485
6.4
13.2
1.44
35
1.12·10-3
37000
9.1
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
1.22·10-3
26500
10,5
A
A
Nm
1/min
9
18
18.5
7200
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE21-0AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
96
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
).$+
QBPD[BPHFK
0BPD[
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
0BPD[,QY
6PLQ
6PLQ
6.
6PLQ
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
).$+
QBPD[BPHFK
0BPD[
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0BPD[,QY
0>1P@
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-20
1FK7062-2AH71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
97
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 20 1FK7063 Compact
Dati tecnici
Abbreviazione
Unità
–2AC71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
2000
8.9
4.4
11.0
5.3
9.1
4.3
nopt
Popt
1/min
kW
2000
1.86
nmax mecc
Mmax
Imax
1/min
Nm
A
7200
35.0
18.5
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
8
2.08
136.5
1.445
19.4
13.4
1.47
40
1.47·10-3
34000
11.1
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
1.57·10-3
25000
12.5
A
A
Nm
1/min
5
10
20.8
4200
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE15-0AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
98
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
0BPD[
0>1P@
).$&
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0BPD[,QY
6PLQ
6PLQ
6.
6PLQ
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
0BPD[
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
).$&
0BPD[,QY
6PLQ
6PLQ
6.
6PLQ
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-21
1FK7063-2AC71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
99
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 21 1FK7063 Compact
Dati tecnici
Abbreviazione
Unità
–2AF71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
3000
7.3
5.6
11.0
8.0
9.1
6.5
nopt
Popt
1/min
kW
3000
2.3
nmax mecc
Mmax
Imax
1/min
Nm
A
7200
35.0
28.0
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
8
1.37
90.5
0.635
8.5
13.4
1.48
40
1.47·10-3
34000
11.1
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
1.57·10-3
25000
12.5
A
A
Nm
1/min
9
18
24.3
6400
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE21-0AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
100
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
0BPD[
).$)
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
0BPD[,QY
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
0BPD[
).$)
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
0BPD[,QY
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-22
1FK7063-2AF71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
101
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 22 1FK7063 Compact
Dati tecnici
Abbreviazione
Unità
–2AH71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
4500
3.0
3.8
11.0
12.0
9.1
9.7
nopt
Popt
1/min
kW
3300
2.3
nmax mecc
Mmax
Imax
1/min
Nm
A
7200
35.0
42.0
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
8
0.915
60.0
0.287
3.8
13.2
1.51
40
1.47·10-3
34000
11.1
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
1.57·10-3
25000
12.5
A
A
Nm
1/min
18
36
30.9
7200
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE13-0AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
102
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
0BPD[
).$+
0BPD[,QY
QBPD[BPHFK
0>1P@
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
).$+
0BPD[
0BPD[,QY
QBPD[BPHFK
0>1P@
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
6PLQ
6P
6.
LQ
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-23
1FK7063-2AH71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
103
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 23 1FK7080 Compact
Dati tecnici
Abbreviazione
Unità
–2AF71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
3000
6,8
4,4
8,0
4,9
6,6
4,0
nopt
Popt
1/min
kW
3000
2,15
nmax mecc
Mmax
Imax
1/min
Nm
A
6000
25,0
18,0
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
8
1,61
105,0
0,985
17,2
17,5
1,52
40
1,42·10-3
120000
10,3
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
1,75·10-3
81000
13,3
A
A
Nm
1/min
5
10
16,5
5500
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE15-0AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
104
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
).$)
QBPD[B,QY
0BPD[
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
0BPD[,QY
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
).$)
QBPD[B,QY
0BPD[
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
0BPD[,QY
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-24
1FK7080-2AF71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
105
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 24 1FK7080 Compact
Dati tecnici
Abbreviazione
Unità
–2AH71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
4500
4,5
4,8
8,0
7,4
6,6
6,0
nopt
Popt
1/min
kW
4000
2,4
nmax mecc
Mmax
Imax
1/min
Nm
A
6000
25,0
27,5
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
8
1,08
68,5
0,421
7,3
17,3
1,54
40
1,42·10-3
120000
10,3
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
1,75·10-3
81000
13,3
A
A
Nm
1/min
9
18
18,5
6000
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE21-0AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
106
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
).$+
0BPD[
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
QBPD[BPHFK
0>1P@
0BPD[,QY
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
0BPD[
).$+
QBPD[BPHFK
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
0BPD[,QY
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-25
1FK7080-2AH71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
107
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 25 1FK7081 Compact
Dati tecnici
Abbreviazione
Unità
–2AC71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
2000
10,0
4,4
12,0
5,0
10,0
4,05
nopt
Popt
1/min
kW
2000
2,1
nmax mecc
Mmax
Imax
1/min
Nm
A
6000
37,0
17,2
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
8
2,4
154,5
1,275
23,5
18,4
1,33
45
2,00·10-3
109000
12,9
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
2,35·10-03
76000
15,9
A
A
Nm
1/min
5
10
24,0
3750
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE15-0AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
108
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
0BPD[
).$&
QBPD[B,QY
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
0BPD[,QY
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
0BPD[
).$&
QBPD[B,QY
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
0BPD[,QY
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-26
1FK7081-2AC71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
109
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 26 1FK7081 Compact
Dati tecnici
Abbreviazione
Unità
–2AF71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
3000
8,7
6,8
12,0
8,7
10,0
7,1
nopt
Popt
1/min
kW
3000
2,75
nmax mecc
Mmax
Imax
1/min
Nm
A
6000
37,0
30,0
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
8
1,375
88,5
0,424
7,7
18,2
1,35
45
2,00·10-3
109000
12,9
Jmot fr
ct
mmot fr
kgm2
Nm/rad
kg
2,35·10-3
76000
15,9
A
A
Nm
1/min
9
18
24,7
6000
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE21-0AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
110
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
).$)
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
QBPD[BPHFK
0BPD[
0>1P@
0BPD[,QY
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
).$)
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
QBPD[BPHFK
0BPD[
0>1P@
0BPD[,QY
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-27
1FK7081-2AF71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
111
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 27 1FK7081 Compact
Dati tecnici
Abbreviazione
Unità
–2AH71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
4500
3,8
4,9
12,0
13,1
10,0
10,6
nopt
Popt
1/min
kW
3000
2,75
nmax mecc
Mmax
Imax
1/min
Nm
A
6000
37,0
45,0
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
8
0,915
59,0
0,1895
3,4
17,9
1,36
45
2,00·10-3
109000
12,9
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
2,35·10-3
76000
15,9
A
A
Nm
1/min
18
36
31,2
6000
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE21-8AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
112
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
0BPD[
).$+
0BPD[,QY
QBPD[BPHFK
0>1P@
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
0BPD[
).$+
0BPD[,QY
0>1P@
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
QBPD[BPHFK
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-28
1FK7081-2AH71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
113
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 28 1FK7083 Compact
Dati tecnici
Abbreviazione
Unità
–2AC71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
2000
12,5
6,3
16,0
7,5
13,3
6,1
nopt
Popt
1/min
kW
2000
2,6
nmax mecc
Mmax
Imax
1/min
Nm
A
6000
50
27,5
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
8
2,13
138,5
0,66
12,8
19,4
1,13
50
2,60·10-3
101000
15,6
Jmot fr
ct
mmot fr
kgm2
Nm/rad
kg
2,95·10-3
72000
18,6
A
A
Nm
1/min
9
18
36,7
4150
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE21-0AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
114
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
).$&
0BPD[
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
0BPD[,QY
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
).$&
0BPD[
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
0BPD[,QY
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-29
1FK7083-2AC71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
115
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 29 1FK7083 Compact
Dati tecnici
Abbreviazione
Unità
–2AC71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
3000
10,5
7,2
16,0
10,1
13,3
8,2
nopt
Popt
1/min
kW
3000
3,3
nmax mecc
Mmax
Imax
1/min
Nm
A
6000
50
37,0
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
8
1,58
102,5
0,377
7,0
18,6
1,18
50
2,60·10-3
101000
15,6
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
2,95·10-3
72000
18,6
A
A
Nm
1/min
9
18
28,5
5600
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE15-0AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
116
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
QBPD[B,QY
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
).$)
0BPD[
0BPD[,QY
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
).$)
0BPD[
0>1P@
QBPD[B,QY
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0BPD[,QY
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-30
1FK7083-2AF71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
117
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 30 1FK7083 Compact
Dati tecnici
Abbreviazione
Unità
–2AH71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
4500
3,0
3,6
16,0
15,0
13,3
12,2
nopt
Popt
1/min
kW
3000
3,3
nmax mecc
Mmax
Imax
1/min
Nm
A
6000
50
55
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
8
1,065
69,0
0,1655
3,2
19,3
1,14
50
2,60·10-3
101000
15,6
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
2,95·10-3
72000
18,6
A
A
Nm
1/min
18
36
36,7
6000
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE21-8AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
118
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
).$+
0BPD[
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
QBPD[BPHFK
0BPD[,QY
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
0BPD[
).$+
QBPD[BPHFK
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
0BPD[,QY
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-31
1FK7083-2AH71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
119
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 31 1FK7084 Compact
Dati tecnici
Abbreviazione
Unità
–2AC71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
2000
15,0
6,7
20,0
8,5
16,6
6,9
nopt
Popt
1/min
kW
2000
3,15
nmax mecc
Mmax
Imax
1/min
Nm
A
6000
61
28,5
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
8
2,36
152,0
0,585
12,0
20,5
1,02
55
3,25·10-3
93000
18,3
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
3,55·10-3
68000
21,3
A
A
Nm
1/min
9
18
41,9
3800
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE21-0AA⃞□
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
120
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
0BPD[
).$&
QBPD[B,QY
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
0BPD[,QY
6PLQ
6PLQ
6.
6PLQ
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
0BPD[
QBPD[B,QY
).$&
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
0BPD[,QY
6PLQ
6PLQ
6.
6PLQ
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-32
1FK7084-2AC71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
121
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 32 1FK7084 Compact
Dati tecnici
Abbreviazione
Unità
–2AF71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
3000
10,0
6,5
20,0
12,1
16,6
9,8
nopt
Popt
1/min
kW
2500
3,25
nmax mecc
Mmax
Imax
1/min
Nm
A
6000
61
41,0
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
8
1,655
106,5
0,284
5,9
21,0
1,01
55
3,25·10-3
93000
18,3
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
3,55·10-3
68000
21,3
A
A
Nm
1/min
18
36
55
5400
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE21-8AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
122
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
0BPD[
).$)
0>1P@
QBPD[B,QY
0BPD[,QY
6DSQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
0BPD[
).$)
QBPD[B,QY
0BPD[,QY
0>1P@
6DSQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
6PLQ
6PLQ
6.
6.
n [rpm]
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-33
1FK7084-2AF71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
123
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 33 1FK7100 Compact
Dati tecnici
Abbreviazione
Unità
–2AC71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
2000
14,5
7,1
18,0
8,4
14,9
6,8
nopt
Popt
1/min
kW
2000
3,05
nmax mecc
Mmax
Imax
1/min
Nm
A
5000
55
28,0
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
8
2,14
138,0
0,55
12,7
23,0
1,95
55
5,40·10-3
183000
17,6
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
6,20·10-3
135000
21,0
A
A
Nm
1/min
9
18
38,1
4200
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE21-0AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
124
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
0BPD[
).$&
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
0BPD[,QY
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
0BPD[
).$&
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
0BPD[,QY
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-34
1FK7100-2AC71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
125
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 34 1FK7100 Compact
Dati tecnici
Abbreviazione
Unità
–2AF71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
3000
12,0
8,0
18,0
11,1
14,9
9,0
nopt
Popt
1/min
kW
3000
3,75
nmax mecc
Mmax
Imax
1/min
Nm
A
5000
55
37,0
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
8
1,62
104,5
0,324
7,3
22,5
2,0
55
5,40·10-3
183000
17,6
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
6,20·10-3
135000
21,0
A
A
Nm
1/min
18
36
54
5000
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE21-8AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
126
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
0BPD[
).$)
0BPD[,QY
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
QBPD[BPHFK
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
0BPD[
).$)
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
QBPD[BPHFK
0BPD[,QY
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-35
1FK7100-2AF71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
127
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 35 1FK7101 Compact
Dati tecnici
Abbreviazione
Unità
–2AC71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
2000
20,5
9,7
27,0
12,3
22,5
10,0
nopt
Popt
1/min
kW
2000
4,3
nmax mecc
Mmax
Imax
1/min
Nm
A
5000
80
40,5
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
8
2,15
144,5
0,343
8,5
25,0
1,62
60
7,9·10-3
164000
23,0
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
8,7·10-3
116000
27,5
A
A
Nm
1/min
18
36
73
4000
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE21-8AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
128
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
0BPD[
).$&
0BPD[,QY
QBPD[B,QY
0>1P@
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
0BPD[
).$&
QBPD[B,QY
0BPD[,QY
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-36
1FK7101-2AC71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
129
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 36 1FK7101 Compact
Dati tecnici
Abbreviazione
Unità
–2AF71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
3000
15,5
11,6
27,0
18,8
22,5
15,2
nopt
Popt
1/min
kW
3000
4,85
nmax mecc
Mmax
Imax
1/min
Nm
A
5000
80
63
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
8
1,435
92,5
0,141
3,5
25,0
1,62
60
7,9·10-3
164000
23,0
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
8,7·10-3
116000
27,5
A
A
Nm
1/min
18
36
52
5000
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE21-8AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
130
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
0BPD[
).$)
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
QBPD[BPHFK
0>1P@
0BPD[,QY
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
).$)
0BPD[
QBPD[BPHFK
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
0BPD[,QY
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-37
1FK7101-2AF71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
131
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 37 1FK7103 Compact
Dati tecnici
Abbreviazione
Unità
–2AC71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
2000
25,0
11,0
36,0
14,4
30,0
11,6
nopt
Popt
1/min
kW
2000
5,2
nmax mecc
Mmax
Imax
1/min
Nm
A
5000
108
46,5
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
8
2,45
162,0
0,288
7,9
27,5
1,43
65
10,4·10-3
148000
28,5
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
11,2·10-3
108000
33,0
A
A
Nm
1/min
18
36
87
3550
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE21-8AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
132
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
0BPD[
).$&
0BPD[,QY
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
QBPD[B,QY
6PLQ
6PLQ
6.
6PLQ
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
0BPD[
).$&
0BPD[,QY
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
QBPD[B,QY
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-38
1FK7103-2AC71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
133
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 38 1FK7103 Compact
Dati tecnici
Abbreviazione
Unità
–2AF71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
3000
14,0
11,5
36,0
26,0
30,0
21,0
nopt
Popt
1/min
kW
2500
5,4
nmax mecc
Mmax
Imax
1/min
Nm
A
5000
108
84
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
8
1,385
89,5
0,0895
2,4
27,0
1,46
65
10,4·10-3
148000
28,5
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
11,2·10-3
108000
33,0
A
A
Nm
1/min
30
56
77
5000
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE23-0AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
134
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
0BPD[
).$)
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
QBPD[BPHFK
0BPD[,QY
0>1P@
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
).$)
0BPD[
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
QBPD[BPHFK
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
0BPD[,QY
0>1P@
6PLQ
6PLQ
6P
LQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-39
1FK7103-2AF71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
135
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 39 1FK7105 Compact
Dati tecnici
Abbreviazione
Unità
–2AC71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
2000
37,0
16,0
48,0
20,0
40,0
16,2
nopt
Popt
1/min
kW
2000
7,7
nmax mecc
Mmax
Imax
1/min
Nm
A
5000
150
71
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
8
2,37
157,5
0,175
4,5
25,5
1,4
70
15,4·10-3
125000
39,0
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
16,2·10-3
95000
43,5
A
A
Nm
1/min
30
56
126
3650
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE23-0AA⃞□
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
136
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
0BPD[
).$&
QBPD[B,QY
0BPD[,QY
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
0BPD[
QBPD[B,QY
).$&
0BPD[,QY
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-40
1FK7105-2AC71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
137
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 40 1FK7105 Compact
Dati tecnici
Abbreviazione
Unità
–2AF71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
3000
26,0
18,0
48,0
31,0
40,0
25,0
nopt
Popt
1/min
kW
3000
8,2
nmax mecc
Mmax
Imax
1/min
Nm
A
5000
150
109
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
8
1,55
102,0
0,073
1,9
26,0
1,4
70
15,4·10-3
125000
39,0
Jmot fr
ct
mmot fr
kgm2
Nm/rad
kg
16,2·10-3
95000
43,5
A
A
Nm
1/min
30
56
87
5000
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE13-0AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
138
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
0BPD[
QBPD[BPHFK
).$)
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
0BPD[,QY
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
0BPD[
).$)
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
QBPD[BPHFK
0>1P@
0BPD[,QY
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-41
1FK7105-2AF71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
139
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
4.2.1.2
1FK7 High Dynamic
Tabella 4- 41 1FK7033 High Dynamic
Dati tecnici
Abbreviazione
Unità
–4CK71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
6000
0,9
1,6
1,3
2,1
1,08
1,7
nopt
Popt
1/min
kW
6000
0,57
nmax mecc
Mmax
Imax
1/min
Nm
A
10000
4,3
7,6
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
6
0,62
39,5
3,51
22,0
6,3
0,68
25
0,025·10-3
7300
3,0
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
0,035·10-3
4700
3,4
A
A
Nm
1/min
3
6
3,5
10000
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL321⃞-⃞TE13-0AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
140
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
).&.
0BPD[
0BPD[,QY
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>
@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
0BPD[
).&.
0BPD[,QY
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>
@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-42
1FK7033-4CK71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
141
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 42 1FK7043 High Dynamic
Dati tecnici
Abbreviazione
Unità
–4CH71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
4500
2,6
3,3
3,5
4,1
2,9
3,3
nopt
Popt
1/min
kW
4500
1,23
nmax mecc
Mmax
Imax
1/min
Nm
A
9000
10,0
12,5
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
6
0,855
54,0
1,2
13,6
11,3
0,49
40
0,1·10-3
11400
6,0
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
0,136·10-3
9000
6,6
A
A
Nm
1/min
5
10
8,3
9000
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL321⃞-⃞TE15-0AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
142
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
0BPD[
).&+
0BPD[,QY
0>1P@
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
6PLQ
6.
6PLQ
6.
Q>USP@
>
@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
0BPD[
).&+
0BPD[,QY
0>1P@
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
6PLQ
6.
6PLQ
6.
Q>USP@
>
@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-43
1FK7043-4CH71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
143
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 43 1FK7043 High Dynamic
Dati tecnici
Abbreviazione
Unità
–4CK71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
6000
2,0
3,5
3,5
5,6
2,9
4,5
nopt
Popt
1/min
kW
6000
1,26
nmax mecc
Mmax
Imax
1/min
Nm
A
9000
10,0
17,0
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
6
0,63
39,8
0,645
7,4
11,5
0,49
40
0,1·10-3
11400
6,0
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
0,136·10-3
9000
6,6
A
A
Nm
1/min
9
18
10,0
9000
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL321⃞-⃞TE15-0AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
144
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
).&.
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
QBPD[BPHFK
0BPD[,QY
0BPD[
0>1P@
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
0BPD[
0BPD[,QY
).&.
QBPD[BPHFK
>
@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>
@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-44
1FK7043-4CK71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
145
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 44 1FK7044 High Dynamic
Dati tecnici
Abbreviazione
Unità
–4CF71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
3000
3,7
3,45
4,5
4,0
3,75
3,2
nopt
Popt
1/min
kW
3000
1,16
nmax mecc
Mmax
Imax
1/min
Nm
A
9000
13,0
12,1
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
6
1,13
72,0
1,49
18,8
12,6
0,44
45
0,126·10-3
9800
7,4
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
0,162·10-3
7900
8,0
A
A
Nm
1/min
5
10
11,0
8050
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE15-0AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
146
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
0BPD[
).&)
0BPD[,QY
0>1P@
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>
@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
0BPD[
).&)
0BPD[,QY
0>1P@
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>
@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-45
1FK7044-4CF71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
147
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 45 1FK7044 High Dynamic
Dati tecnici
Abbreviazione
Unità
–4CH71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
4500
3,0
3,9
4,5
5,4
3,75
4,35
nopt
Popt
1/min
kW
4500
1,41
nmax mecc
Mmax
Imax
1/min
Nm
A
9000
13,0
16,4
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
6
0,835
53,0
0,815
10,2
12,5
0,44
45
0,126·10-3
9800
7,4
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
0,162·10-3
7900
8,0
A
A
Nm
1/min
9
18
13,0
9000
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL321⃞-⃞TE15-0AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
148
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
0BPD[
0BPD[,QY
).&+
0>1P@
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>
@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
0BPD[
0BPD[,QY
).&+
0>1P@
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>
@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-46
1FK7044-4CH71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
149
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 46 1FK7061 High Dynamic
Dati tecnici
Abbreviazione
Unità
–4CF71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
3000
5,4
5,3
6,4
6,1
5,3
4,95
nopt
Popt
1/min
kW
3000
1,7
nmax mecc
Mmax
Imax
1/min
Nm
A
7500
17,3
18,5
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
6
1,05
67,5
0,715
22,0
31,0
0,79
45
0,41·10-3
36500
9,5
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
0,51·10-3
26500
11,0
A
A
Nm
1/min
9
18
17,0
7500
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE21-0AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
150
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
0BPD[
).&)
0BPD[,QY
0>1P@
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>
@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
0BPD[
).&)
0BPD[,QY
0>1P@
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>
@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-47
1FK7061-4CF71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
151
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 47 1FK7061 High Dynamic
Dati tecnici
Abbreviazione
Unità
–4CH71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
4500
4,3
6,2
6,4
8,7
5,3
7,1
nopt
Popt
1/min
kW
4500
2,05
nmax mecc
Mmax
Imax
1/min
Nm
A
7500
17,3
26,5
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
6
0,73
47,0
0,348
10,7
30,5
0,79
45
0,41·10-3
36500
9,5
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
0,51·10-3
26500
11,0
A
A
Nm
1/min
9
18
13,1
7500
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE21-0AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
152
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
QBPD[BPHFK
0BPD[
).&+
0>1P@
0BPD[,QY
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>
@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
QBPD[BPHFK
0BPD[
).&+
0>1P@
0BPD[,QY
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>
@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-48
1FK7061-4CH71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
153
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 48 1FK7064 High Dynamic
Dati tecnici
Abbreviazione
Unità
–4CC71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
2000
10,0
7,1
12,0
8,1
10,0
6,6
nopt
Popt
1/min
kW
2000
2,1
nmax mecc
Mmax
Imax
1/min
Nm
A
7500
32,0
25,0
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
6
1,48
94,0
0,585
21,5
37,0
0,6
55
0,75·10-3
29500
15,4
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
0,85·10-3
22500
16,8
A
A
Nm
1/min
9
18
26,0
6150
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE21-0AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
154
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
0BPD[
).&&
0BPD[,QY
0>1P@
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>
@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
0BPD[
).&&
0BPD[,QY
0>1P@
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>
@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-49
1FK7064-4CC71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
155
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 49 1FK7064 High Dynamic
Dati tecnici
Abbreviazione
Unità
–4CF71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
3000
8,0
7,6
12,0
10,8
10,0
8,7
nopt
Popt
1/min
kW
3000
2,5
nmax mecc
Mmax
Imax
1/min
Nm
A
7500
32,0
33,0
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
6
1,11
70,5
0,348
12,0
34,5
0,64
55
0,75·10-3
29500
15,4
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
0,85·10-3
22500
16,8
A
A
Nm
1/min
18
36
32,0
7500
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE21-0AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
156
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
0BPD[
0BPD[,QY
).&)
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>
@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
0BPD[
0BPD[,QY
).&)
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>
@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-50
1FK7064-4CF71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
157
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 50 1FK7064 High Dynamic
Dati tecnici
Abbreviazione
Unità
–4CH71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
4500
5,0
7,0
12,0
15,0
10,0
12,2
nopt
Popt
1/min
kW
3500
2,75
nmax mecc
Mmax
Imax
1/min
Nm
A
7500
32,0
46,0
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
6
0,8
50,5
0,17
6,2
36,5
0,6
55
0,75·10-3
29500
15,4
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
0,85·10-3
22500
16,8
A
A
Nm
1/min
18
36
27,5
7500
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE21-8AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
158
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
).&+
0BPD[,QY
0>1P@
QBPD[BPHFK
0BPD[
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>
@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
QBPD[BPHFK
0BPD[
).&+
0BPD[,QY
0>1P@
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>
@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-51
1FK7064-4CH71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
159
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 51 1FK7085 High Dynamic
Dati tecnici
Abbreviazione
Unità
–4CC71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
2000
15,0
10,0
22,0
13,5
18,3
10,9
nopt
Popt
1/min
kW
2000
3,15
nmax mecc
Mmax
Imax
1/min
Nm
A
6000
65
51
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
8
1,63
105,0
0,309
9,8
31,5
0,77
45
2,2·10-3
84000
23,0
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
2,55·10-3
63000
26,0
A
A
Nm
1/min
18
36
53
5500
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE21-8AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
160
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
0BPD[
).&&
0BPD[,QY
0>1P@
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>
@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
0BPD[
).&&
0BPD[,QY
0>1P@
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>
@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-52
1FK7085-4CC71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
161
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 52 1FK7085 High Dynamic
Dati tecnici
Abbreviazione
Unità
–4CF71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
3000
6,5
7,0
22,0
22,0
18,3
17,8
nopt
Popt
1/min
kW
2500
3,15
nmax mecc
Mmax
Imax
1/min
Nm
A
6000
65
84
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
8
1,0
64,5
0,118
3,7
31,5
0,78
65
2,2·10-3
84000
23,0
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
2,55·10-3
63000
26,0
A
A
Nm
1/min
30
56
51
6000
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE21-8AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
162
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
0BPD[
).&)
0BPD[,QY
QBPD[BPHFK
0>1P@
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>
@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
0BPD[
).&)
QBPD[BPHFK
0BPD[,QY
0>1P@
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>
@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-53
1FK7085-4CF71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
163
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 53 1FK7086 High Dynamic
Dati tecnici
Abbreviazione
Unità
–4CC71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
2000
18,0
9,0
28,0
13,2
23,0
10,7
nopt
Popt
1/min
kW
200
3,75
nmax mecc
Mmax
Imax
1/min
Nm
A
6000
105
71
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
8
2,12
138,0
0,309
8,2
26,5
0,455
65
2,2·10-3
84000
23,0
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
2,55·10-3
63000
26,0
A
A
Nm
1/min
18
36
69
4200
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE21-8AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
164
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
0BPD[
).&&
0BPD[,QY
0>1P@
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>
@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
0BPD[
).&&
0BPD[,QY
0>1P@
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>
@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-54
1FK7086-4CC71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
165
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 54 1FK7086 High Dynamic
Dati tecnici
Abbreviazione
Unità
–4CF71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
3000
6,5
5,7
28,0
21,5
23,0
17,4
nopt
Popt
1/min
kW
2000
3,75
nmax mecc
Mmax
Imax
1/min
Nm
A
6000
105
115
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
8
1,3
84,5
0,118
3,1
26,5
0,46
65
2,2·10-3
84000
23,0
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
2,55·10-3
63000
26,0
A
A
Nm
1/min
30
56
66
6000
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE23-0AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
166
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
0BPD[
).&)
0>1P@
QBPD[BPHFK
0BPD[,QY
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>
@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
0BPD[
).&)
0>1P@
QBPD[BPHFK
0BPD[,QY
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>
@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-55
1FK7086-4CF71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
167
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
4.2.1.3
1FK7 High Inertia
Tabella 4- 55 1FK7042 High Inertia
Dati tecnici
Abbreviazione
Unità
–3BK71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
6000
1,5
2,5
3,0
4,4
2,5
3,55
nopt
Popt
1/min
kW
5000
1,02
nmax mecc
Mmax
Imax
1/min
Nm
A
9000
10,5
15,3
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
8
0,68
44,5
1,145
8,6
7,5
3,8
30
0,51·10-3
14600
5,1
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
0,54·10-3
10900
5,8
A
A
Nm
1/min
5
10
6,8
9000
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE15-0AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
168
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
).%.
QBPD[BPHFK
0BPD[
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
0BPD[,QY
6PLQ
6PLQ
6.
6PLQ
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
).%.
0BPD[
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
QBPD[BPHFK
0>1P@
0BPD[,QY
6PLQ
6PLQ
6.
6PLQ
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-56
1FK7042-3BK71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
169
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 56 1FK7060 High Inertia
Dati tecnici
Abbreviazione
Unità
–3BF71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
3000
4,7
3,7
6,0
4,45
5,0
3,6
nopt
Popt
1/min
kW
3000
1,48
nmax mecc
Mmax
Imax
1/min
Nm
A
7200
18,0
15,0
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
8
1,33
85,5
1,35
15,2
11,3
2,8
30
1,25·10-3
38500
7,9
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
1,35·10-3
27500
9,3
A
A
Nm
1/min
5
10
13,2
6700
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE15-0AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
170
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
0BPD[
).%)
0>1P@
0BPD[,QY
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
0BPD[
).%)
0>1P@
0BPD[,QY
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-57
1FK7060-3BF71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
171
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 57 1FK7062 High Inertia
Dati tecnici
Abbreviazione
Unità
–3BF71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
3000
6,0
4,0
8,5
5,3
7,1
4,3
nopt
Popt
1/min
kW
3000
1,6
nmax mecc
Mmax
Imax
1/min
Nm
A
7200
26,0
19,2
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
8
1,605
102,5
1,145
14,6
12,8
3,15
35
2,35·10-3
34500
10,7
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
2,45·10-3
25000
12,1
A
A
Nm
1/min
5
10
16,0
5600
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE15-0AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
172
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
0BPD[
QBPD[B,QY
).%)
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
0BPD[,QY
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
0BPD[
QBPD[B,QY
).%)
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
0BPD[,QY
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-58
1FK7062-3BF71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
173
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 58 1FK7081 High Inertia
Dati tecnici
Abbreviazione
Unità
–3BF71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
3000
8,7
6,8
12,0
8,7
10,0
7,1
nopt
Popt
1/min
kW
3000
2,75
nmax mecc
Mmax
Imax
1/min
Nm
A
6000
37,0
30,0
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
8
1,375
88,5
0,424
7,7
18,2
3,3
45
4,90·10-3
100000
15,2
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
5,20·10-3
71000
18,2
A
A
Nm
1/min
9
18
24,7
6000
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE21-0AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
174
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
).%)
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
QBPD[BPHFK
0BPD[
0>1P@
0BPD[,QY
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
0BPD[
).%)
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
QBPD[BPHFK
0>1P@
0BPD[,QY
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-59
1FK7081-3BF71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
175
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 59 1FK7084 High Inertia
Dati tecnici
Abbreviazione
Unità
–3BC71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
2000
15,0
6,7
20,0
8,5
16,8
6,9
nopt
Popt
1/min
kW
2000
3,15
nmax mecc
Mmax
Imax
1/min
Nm
A
6000
61
28,5
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
8
2,36
152,0
0,585
12,0
20,5
3,1
55
9,9·10-3
82000
23,0
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
10,2·10-3
62000
26,0
A
A
Nm
1/min
9
18
41,9
3800
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE215-0AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
176
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
0BPD[
).%&
QBPD[B,QY
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
0BPD[,QY
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
).%&
0BPD[
QBPD[B,QY
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
0BPD[,QY
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-60
1FK7084-3BC71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
177
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 60 1FK7084 High Inertia
Dati tecnici
Abbreviazione
Unità
–3BF71
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
3000
10,0
6,5
20,0
12,1
16,6
9,8
nopt
Popt
1/min
kW
2500
3,25
nmax mecc
Mmax
Imax
1/min
Nm
A
6000
61
41,0
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
8
1,655
106,5
0,284
5,9
21,0
3,1
55
9,90·10-3
82000
23,0
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
1,02·10-3
62000
26,0
A
A
Nm
1/min
18
36
55
5400
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE21-8AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
I dati nominali valgono per una tensione di circuito intermedio di 600 V.
Motori sincroni 1FK7, generazione 2
178
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
0BPD[
).%)
QBPD[B,QY
0BPD[,QY
0>1P@
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
).%)
0BPD[
QBPD[B,QY
0BPD[,QY
0>1P@
6SDQQXQJVJUHQ]NHQQOLQLHQ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
>@6,1$0,&6$/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
>ದದದದದದ@6,1$0,&6%/06/091HW]=ZLVFKHQNUHLVVSDQQXQJ9'&'&OLQNYROWDJH9
Figura 4-61
1FK7084-3BF71
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
179
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
4.2.2
Motori 1FK7 su SINAMICS S110 / S120 POWER MODULE con tensione di rete
1 AC 200 V ... 240 V
4.2.2.1
1FK7 Compact e 1FK7 High Dynamic
Tabella 4- 61 1FK7011 Compact
Dati tecnici
Abbreviazione
Unità
–5AK21
nN
2p
MN (100 K)
IN
M0 (60 K)
M0 (100 K)
I0 (60 K)
I0 (100 K)
JMotFr
Jmot
1/min
Nm
A
Nm
Nm
A
A
10–4 kgm2
10–4 kgm2
6000
8
0,08
0,5
0,15
0,18
0,7
0,85
0,083
0,064
nopt
Popt
1/min
kW
5000
0,06
nmax mecc
nmax Inv
Mmax
Imax
1/min
1/min
Nm
A
8000
8000
0,5
2,4
kT
kE
RStr
LD
Tel
Tmecc
Tth
ct
mMotFr
mMot
Nm/A
V/1000 min–1
Ohm
mH
ms
ms
min
Nm/rad
kg
kg
0,21
14
9,4
13
1,4
4,1
14
1400
1,0
0,9
A
A
Nm
0,9
1,8
0,37
Dati di progettazione
Velocità nominale
Numero di poli
Coppia nominale (100K)
Corrente nominale
Coppia da fermo (60 K)
Coppia da fermo (100 K)
Corrente da fermo (60 K)
Corrente da fermo (100 K)
Momento d'inerzia (con freno)
Momento d'inerzia (senza freno)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Velocità max. consentita (mecc.)
Velocità max. consentita (convertitore)
Velocità max. consentita
Corrente massima
Costanti fisiche
Costante di coppia
Costante di tensione
Resistenza dell'avvolgimento a 20 °C
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Power Module consigliato 6SL3210-1SB11-0UA0
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
IN Inv
Imax Inv
Mmax Inv
Motori sincroni 1FK7, generazione 2
180
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
>D@
0B PD[
0>1P@
0 BPD[,QY
6PLQ
6PLQ
6PLQ
6.
6.
[a]
Q>USP@
SINAMICS 1 AC 230 V
Figura 4-62
1FK7011-5AK21
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
181
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 62 1FK7015 Compact
Dati tecnici
Abbreviazione
Unità
–5AK21
nN
2p
MN (100 K)
IN
M0 (60 K)
M0 (100 K)
I0 (60 K)
I0 (100 K)
JMotFr
Jmot
1/min
Nm
A
Nm
Nm
A
A
10–4 kgm2
10–4 kgm2
6000
8
0,16
0,5
0,29
0,35
0,7
0,85
0,102
0,083
nopt
Popt
1/min
kW
5000
0,12
nmax mecc
nmax Inv
Mmax
Imax
1/min
1/min
Nm
A
8000
8000
1
2,4
kT
kE
RStr
LD
Tel
Tmecc
Tth
ct
mMotFr
mMot
Nm/A
V/1000 min–1
Ohm
mH
ms
ms
min
Nm/rad
kg
kg
0,42
28
13,6
26
1,9
1,9
16
1300
1,2
1,2
A
A
Nm
0,9
1,8
0,75
Dati di progettazione
Velocità nominale
Numero di poli
Coppia nominale (100K)
Corrente nominale
Coppia da fermo (60 K)
Coppia da fermo (100 K)
Corrente da fermo (60 K)
Corrente da fermo (100 K)
Momento d'inerzia (con freno)
Momento d'inerzia (senza freno)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Velocità max. consentita (mecc.)
Velocità max. consentita (convertitore)
Velocità max. consentita
Corrente massima
Costanti fisiche
Costante di coppia
Costante di tensione
Resistenza dell'avvolgimento a 20 °C
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Power Module consigliato 6SL3210-1SB11-0UA0
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
IN Inv
Imax Inv
Mmax Inv
Motori sincroni 1FK7, generazione 2
182
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
>D@
0B PD[
0>1P@
0 BPD[,QY
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
[a]
SINAMICS 1 AC 230 V
Figura 4-63
1FK7015-5AK21
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
183
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 63 1FK7022 Compact
Dati tecnici
Abbreviazione
Unità
–5AK21
nN
2p
MN (100 K)
IN
M0 (60 K)
M0 (100 K)
I0 (60 K)
I0 (100 K)
JMotFr
Jmot
1/min
Nm
A
Nm
Nm
A
A
10–4 kgm2
10–4 kgm2
6000
6
0,6
1,4
0,7
0,85
1,5
1,8
0,35
0,28
nopt
Popt
1/min
kW
6000
0,38
nmax mecc
nmax Inv
Mmax
Imax
1/min
1/min
Nm
A
10000
9990
3,4
8,0
kT
kE
RStr
LD
Tel
Tmecc
Tth
ct
mMotFr
mMot
Nm/A
V/1000 min–1
Ohm
mH
ms
ms
min
Nm/rad
kg
kg
0,46
29
4,2
9,1
2,2
1,7
18
3000
2,0
1,8
A
A
Nm
2,3
4,6
2,0
Dati di progettazione
Velocità nominale
Numero di poli
Coppia nominale (100K)
Corrente nominale
Coppia da fermo (60 K)
Coppia da fermo (100 K)
Corrente da fermo (60 K)
Corrente da fermo (100 K)
Momento d'inerzia (con freno)
Momento d'inerzia (senza freno)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Velocità max. consentita (mecc.)
Velocità max. consentita (convertitore)
Velocità max. consentita
Corrente massima
Costanti fisiche
Costante di coppia
Costante di tensione
Resistenza dell'avvolgimento a 20 °C
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Power Module consigliato 6SL3210-1SB12-3UA0
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
IN Inv
Imax Inv
Mmax Inv
Motori sincroni 1FK7, generazione 2
184
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
>D@
0BPD[
0>1P@
0BPD[,QY
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
[a]
SINAMICS 1 AC 230 V
Figura 4-64
1FK7022-5AK21
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
185
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 64 1FK7032 Compact
Dati tecnici
Abbreviazione
Unità
–2AF21
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
3000
1,0
1,6
1,15
1,7
0,95
1,4
nopt
Popt
1/min
kW
3000
0,315
nmax mecc
Mmax
Imax
1/min
Nm
A
10000
4,5
7,0
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
6
0,67
45,0
5,05
17,3
3,45
2,2
25
0,065·10-3
6000
2,7
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
0,075·10-3
4100
3,1
A
A
Nm
1/min
2,3
4,6
3,0
6400
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE13-0AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
Motori sincroni 1FK7, generazione 2
186
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
).$)
>D@
0BPD[
0BPD[,QY
0>1P@
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
[a]
SINAMICS 1 AC 230 V
Figura 4-65
1FK7032-2AF21
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
187
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 65 1FK7034 Compact
Dati tecnici
Abbreviazione
Unità
–2AF21
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
3000
1,45
1,8
1,6
1,9
1,35
1,55
nopt
Popt
1/min
kW
3000
0,455
nmax mecc
Mmax
Imax
1/min
Nm
A
10000
6,5
8
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
6
0,84
55,0
4,46
17,2
3,85
1,71
30
0,09·10-3
5300
3,5
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
0,10·10-3
3750
3,9
A
A
Nm
1/min
2,3
4,6
3,9
5200
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE13-0AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
Motori sincroni 1FK7, generazione 2
188
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
0BPD[
).$)
>D@
0BPD[,QY
0>1P@
QBPD[B,QY
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
[a]
SINAMICS 1 AC 230 V
Figura 4-66
1FK7034-2AF21
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
189
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 66 1FK7042 Compact
Dati tecnici
Abbreviazione
Unità
–2AF21
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K))
1/min
Nm
A
Nm
A
Nm
A
3000
2,6
3,5
3,0
3,95
2,5
3,2
nopt
Popt
1/min
kW
3000
0,82
nmax mecc
Mmax
Imax
1/min
Nm
A
9000
10,5
13,8
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
8
0,76
49,6
1,435
10,6
7,4
2,15
30
0,29·10-3
15500
4,6
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
0,32·10-3
11400
5,3
A
A
Nm
1/min
3,9
7,8
6,0
5800
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL312⃞-⃞TE13-0AA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
Motori sincroni 1FK7, generazione 2
190
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
).$)
>D@
0BPD[
0BPD[,QY
QBPD[B,QY
0>1P@
6
6
6
6.
6.
[a]
Q>USP@
SINAMICS 1 AC 230 V
Figura 4-67
1FK7042-2AF21
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
191
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 67 1FK7033 High Dynamic
Dati tecnici
Abbreviazione
Unità
–4CF21
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
3000
1,2
2,05
1,3
2,1
1,08
1,7
nopt
Popt
1/min
kW
3000
0,375
nmax mecc
Mmax
Imax
1/min
Nm
A
10000
4,3
7,6
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
6
0,62
39,5
3,51
22,0
6,3
0,68
25
0,025·10-3
7300
3,0
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
0,035·10-3
4700
3,4
A
A
Nm
1/min
2,3
4,6
2,7
7150
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL321⃞-⃞SB12-3UA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
Motori sincroni 1FK7, generazione 2
192
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
).&)
>D@
0BPD[
0>1P@
0BPD[,QY
6PLQ
6PLQ
6PLQ
6.
6.
[a]
Q>USP@
SINAMICS 1 AC 230 V
Figura 4-68
1FK7033_4CF21
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
193
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
Tabella 4- 68 1FK7043 High Dynamic
Dati tecnici
Abbreviazione
Unità
–4CF21
nN
MN (100 K)
IN (100 K)
M0 (100 K)
I0 (100 K)
M0 (60 K)
I0 (60 K)
1/min
Nm
A
Nm
A
Nm
A
3000
3,0
3,7
3,3
3,9
2,9
3,3
nopt
Popt
1/min
kW
3000
0,94
nmax mecc
Mmax
Imax
1/min
Nm
A
9000
10,0
12,5
2p
kT
kE
RStr
LD
Tel
Tmecc
Tth
JMot
ct
mMot
Nm/A
V/1000 min–1
Ω
mH
ms
ms
min
kgm2
Nm/rad
kg
6
0,845
54,0
1,2
13,6
11,3
0,5
40
0,1·10-3
11400
6,0
Jmot fr
ct fr
mmot fr
kgm2
Nm/rad
kg
0,136·10-3
9000
6,6
A
A
Nm
1/min
3,9
7,8
6,6
5350
Dati di progettazione
Numero di giri nominale
Coppia nominale (100 K)
Corrente nominale (100 K)
Coppia da fermo (100 K)
Corrente da fermo (100 K)
Coppia da fermo (60 K)
Corrente da fermo (60 K)
Punto di funzionamento ottimale
Numero di giri ottimale
Potenza ottimale
Dati limite
Giri max. ammessi (mecc.)
Coppia max.
Corrente max.
Dati motore
Numero di poli
Costante di coppia (100 K)
Costante di tensione (a 20 °C)
Resistenza dell'avvolgimento (a 20 °C)
Induttanza del campo rotante
Costante di tempo elettrica
Costante di tempo meccanica
Costante di tempo termica
Rigidità torsionale dell'albero
Peso con il freno
Peso senza il freno
Dati del motore con freno integrato
Coppia di inerzia con freno
Rigidità torsionale dell'albero con freno
Peso con freno
Motor Module consigliato 6SL321⃞-⃞SB13-9UA⃞
Corrente nominale convertitore
Corrente massima convertitore
Coppia max. con Imax Inv
Giri max. ammessi (convertitore)
IN Inv
Imax Inv
Mmax Inv
nmax Inv
Motori sincroni 1FK7, generazione 2
194
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.2 Curve caratteristiche velocità/coppia
).&)
>D@
0BPD[
QBPD[B,QY
0>1P@
0BPD[,QY
6PLQ
6PLQ
6PLQ
6.
6.
Q>USP@
[a]
SINAMICS 1 AC 230 V
Figura 4-69
1FK7043_4CF21
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
195
Dati tecnici e curve caratteristiche
4.3 Disegni quotati
4.3
Disegni quotati
CAD CREATOR
Il CAD CREATOR, grazie all'interfaccia utente intuitiva, consente di creare rapidamente
● Disegni quotati
● dati CAD 2D/3D
e offre un supporto per realizzare la documentazione degli impianti a livello di informazioni
specifiche di progettazione. Nella versione online sono attualmente disponibili i dati per i
motori, gli azionamenti e i controllori CNC.
Per ulteriori informazioni consultare l'indirizzo Internet: http://www.siemens.com/cadcreator
Motori
● Motori sincroni 1FK7, 1FT7, 1FT6
● Motori sincroni integrati 1FE1
● Motori Torque completi 1FW3
● Motori Torque integrati 1FW6
● Motoriduttori 1FK7, 1FT7, 1FT6
● Motori sincroni/asincroni 1PH8
● Motori asincroni 1PH7, 1PH4, 1PL6, 1PM4, 1PM6
● Elettromandrini 2SP1
● Motori lineari 1FN3
SINAMICS S120
● Control Unit
● Power Module (Blocksize, Chassis)
● Line Module (Booksize, Chassis)
● Componenti lato rete
● Motor Module (Booksize, Chassis)
● Componenti del circuito intermedio
● Componenti di sistema aggiuntivi
● Componenti di potenza lato uscita
● Collegamento del sistema encoder
● Tecnica di collegamento MOTION-CONNECT
Motori sincroni 1FK7, generazione 2
196
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.3 Disegni quotati
SIMOTION
● SIMOTION D
● SIMOTION C
SINUMERIK solution line
● Controllori
● Componenti operativi per controlli CNC
Aggiornamento dei disegni quotati
Nota
La Siemens AG si riserva la facoltà di apportare, senza alcun preavviso, modifiche alle
dimensioni della macchina, al fine di migliorare il prodotto. Quindi è possibile che i disegni
quotati non siano aggiornati. I disegni quotati aggiornati possono essere richiesti
gratuitamente al reparto di vendita della sede Siemens competente.
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
197
Dati tecnici e curve caratteristiche
4.3 Disegni quotati
4.3.1
Motori 1FK7
For motor
Dimensions in mm (inches)
Shaft Type
height
DIN b1
IEC N
Shaft extension DE
c1
LA
e1
M
f
AB
f1
T
g2
–
i2
–
s2
S
d
D
d6
–
l
E
t
GA
u
F
1FK7 Compact
20
1FK701
30
(1.18)
7
(0.28)
46
(1.81)
40
(1.57)
2,5
(0.10)
66
(2.60)
18
(0.71)
4,5
(0.18)
8
(0.31)
–
18
(0.71)
8,8
(0.35)
2
(0.08)
28
1FK702
40
(1.57)
10
(0.39)
63
(2.48)
55
(2.17)
2,5
(0.10)
75
(2.95)
20
(0.79)
5,4
(0.21)
9
(0.35)
M3
20
(0.79)
10,2
(0.40)
3
(0.12)
Encoder systems:
Resolver
Absolute encoder AM16S/R / AM15DQ
k
LB
o1
–
o2
–
k
LB
o1
–
o2
–
Encoder systems:
Incremental encoder IC2048S/R / IC22DQ
Absolute encoder AM2048S/R / AM22DQ
AM512S/R / AM20DQ
AM32S/R / AM16DQ
with holding
without holding
brake
brake
k
o1
o2
k
o1
o2
–
–
–
–
LB
LB
1FK7011
140
(5.51)
89
(3.50)
118
(4.65)
140
(5.51)
89
(3.50)
118
(4.65)
155
(6.10)
89
(3.50)
118
(4.65)
155
(6.10)
89
(3.50)
118
(4.65)
1FK7015
165
(6.50)
114
(4.49)
143
(5.63)
165
(6.50)
114
(4.49)
143
(5.63)
180
(7.09)
114
(4.49)
143
(5.63)
180
(7.09)
114
(4.49)
143
(5.63)
1FK7022
153
(6.02)
95
(3.74)
128
(5.04)
175
(6.89)
95
(3.74)
150
(5.91)
178
(7.01)
95
(3.74)
128
(5.04)
200
(7.87)
95
(3.74)
150
(5.91)
with holding
brake
without holding
brake
Shaft Type
height
1FK7 Compact
o2
o1
Ø b1
t
c1
Ø s2
g2
e1
Ø
i2
l
l
d6 f1
k
f
G_NC01_XX_00450
Shaft design
with fitted key
u
1FK701
1FK702
Ød
28
Ød
20
Motori sincroni 1FK7, generazione 2
198
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.3 Disegni quotati
DQI-Encoder with DRIVE-CLiQ interface
(without resolver)
without brake with brake
Encoder systems without DRIVE-CLiQ interface
(without resolver)
without brake with brake
g1
–
g2
–
o2
–
k
LB
o1
–
k
LB
o1
–
g1
–
g2
–
o2
–
k
LB
o1
–
k
LB
o1
–
104,5
(4.11)
78
(3.07)
50
(1.97)
173
(6.81)
111
(4.37)
200
(7.87)
138
(5.43)
78
(3.07)
78
(3.07)
47
(1.85)
173
(6.81)
111
(4.37)
200
(7.87)
138
(5.43)
198
(7.80)
136
(5.35)
225
(8.86)
163
(6.42)
198
(7.80)
136
(5.35)
225
(8.86)
163
(6.42)
147
(5.79)
85
(3.35)
179
(7.05)
117
(4.61)
152
(5.98)
85
(3.35)
184
(7.24)
117
(4.61)
174
(6.85)
112
(4.41)
206
(8.11)
144
(5.67)
179
(7.05)
112
(4.41)
211
(8.31)
144
(5.67)
168
(6.61)
106
(4.17)
203
(7.99)
141
(5.55)
173
(6.81)
106
(4.17)
208
(8.19)
141
(5.55)
1FK7062-2A
190
(7.48)
128
(5.04)
226
(8.90)
163
(6.42)
195
(7.68)
128
(5.04)
231
(9.09)
163
(6.42)
1FK7063-2A
213
(8.39)
151
(5.94)
248
(9.76)
186
(7.32)
218
(8.58)
151
(5.94)
253
(9.96)
186
(7.32)
171
(6.73)
111
(4.37)
223
(8.78)
163
(6.42)
176
(6.93)
111
(4.37)
228
(8.98)
163
(6.42)
1FK7081-2A
190
(7.48)
130
(5.12)
242
(9.53)
182
(7.17)
195
(7.68)
130
(5.12)
247
(9.72)
182
(7.17)
1FK7083-2A
209
(8.23)
149
(5.87)
261
201
(10.28) (7.91)
214
(8.43)
149
(5.87)
266
201
(10.47) (7.91)
1FK7084-2A
229
(9,02)
168
(6,61)
281
221
(11.06) (8.70)
234
(9.21)
168
(6.61)
286
221
(11.26) (8.70)
183
(7.20)
118
(4.65)
220
(8.66)
188
(7.40)
118
(4.65)
225
(8.86)
209
(8.23)
144
(5.67)
261
196
(10.28) (7.72)
214
(8.43)
144
(5.67)
266
196
(10.47) (7.72)
1FK7103-2A
235
(9.25)
170
(6.69)
287
222
(11.30) (8.74)
240
(9.45)
170
(6.69)
292
222
(11.50) (8.74)
1FK7105-2A
287
222
(11.30) (8.74)
339
274
(13.35) (10.79)
292
222
(11.50) (8.74)
344
274
(13.54) (10.79)
Shaft Type
height
1FK7 Compact
36
1FK7032-2A
1FK7034-2A
48
1FK7040-2A
104,5
(4.11)
90
(3.54)
50
(1.97)
1FK7042-2A
63
80
100
1FK7060-2A
1FK7080-2A
1FK7100-2A
104,5
(4.11)
104,5
(4.11)
104,5
(4.11)
1FK7101-2A
104
(4.09)
119
(4.69)
137
(5.39)
50
(1.97)
48
(1.89)
53
(2.09)
158
(6.22)
170
(6.69)
94
(3.70)
102
(4.02)
94
(3.70)
94
(3.70)
90
(3.54)
104
(4.09)
119
(4.69)
137
(5.39)
52
(2.05)
52
(2.05)
50
(1.97)
55
(2.17)
158
(6.22)
170
(6.69)
1FK7 High Inertia
48
1FK7042-3B
104,5
(4.11)
90
(3.54)
50
(1.97)
187
(7.36)
125
(4.92)
219
(8.62)
157
(6.18)
94
(3.70)
90
(3.54)
52
(2.05)
192
(7.56)
125
(4.92)
224
(8.82)
157
(6.18)
63
1FK7060-3B
104,5
(4.11)
104
(4.09)
50
(1.97)
182
(7.17)
120
(4.72)
217
(8.54)
155
(6.10)
102
(4.02)
104
(4.09)
52
(2.05)
187
(7.36)
120
(4.72)
222
(8.74)
155
(6.10)
216
(8.50)
153
(6.02)
251
(9.88)
189
(7.44)
221
(8.70)
153
(6.02)
256
189
(10.08) (7.44)
211
(8.31)
151
(5.94)
264
203
(10.39) (7.99)
216
(8.50)
151
(5.94)
269
203
(10.59) (7.99)
1FK7062-3B
80
1FK7081-3B
104,5
(4.11)
119
(4.69)
48
(1.89)
1FK7084-3B
270
209
(10.63) (8.23)
322
262
(12.68) (10.31)
94
(3.70)
119
(4.69)
50
(1.97)
275
209
(10.83) (8.23)
327
262
(12.87) (10.31)
1FK7 High Dynamic
36
1FK7033-4C
104,5
(4.11)
78
(3.07)
50
(1.97)
183
(7.20)
121
(4.76)
210
(8.27)
148
(5.83)
78
(3.07)
78
(3.07)
47
(1.85)
183
(7.20)
121
(4.76)
210
(8.27)
148
(5.83)
48
1FK7043-4C
104,5
(4.11)
90
(3.54)
56
(2.20)
200
(7.87)
132
(5.20)
232
(9.13)
164
(6.46)
94
(3.70)
90
(3.54)
58
(2.28)
205
(8.07)
132
(5.20)
237
(9.33)
164
(6.46)
225
(8.86)
157
(6.18)
257
189
(10.12) (7.44)
230
(9.06)
157
(6.18)
262
189
(10.31) (7.44)
203
(7.99)
141
(5.55)
238
(9.37)
208
(8.19)
141
(5.55)
243
(9.57)
1FK7044-4C
63
1FK7061-4C
104,5
(4.11)
104
(4.09)
50
(1.97)
1FK7064-4C
80
1FK708.-4CC 104,5
(4.11)
119
(4.69)
1FK708.-4CF
139
(5.47)
48
(1.89)
176
(6.93)
267
205
(10.51) (8.07)
302
240
(11.89) (9.45)
257
197
(10.12) (7.76)
309
249
(12.17) (9.80)
102
(4.02)
94
(3.70)
104
(4.09)
119
(4.69)
52
(2.05)
50
(1.97)
176
(6.93)
272
205
(10.71) (8.07)
307
240
(12.09) (9.45)
262
197
(10.31) (7.76)
314
249
(12.36) (9.80)
139
(5.47)
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
199
Dati tecnici e curve caratteristiche
4.3 Disegni quotati
For motor
Dimensions in mm (inches)
Shaft Type
height
DIN a1
IEC P
Shaft extension DE
b1
N
c1
LA
e1
M
f
AB
f1
T
i2
–
s2
S
d
D
d6
–
I
E
t
GA
u
F
1FK7 Compact/High Dynamic/High Inertia
36
1FK703
90
(3.54)
60
(2.36)
8
(0.31)
75
(2.95)
72
(2.83)
3
(0.12)
30
(1.18)
6,5
(0.26)
14
(0.55)
M5
30
(1.18)
16
(0.63)
5
(0.20)
48
1FK704
120
(4.72)
80
(3.15)
10
(0.39)
100
(3.94)
96
(3.78)
3
(0.12)
40
(1.57)
6,5
(0.26)
19
(0.75)
M6
40
(1.57)
21,5
(0.85)
6
(0.24)
63
1FK706
155
(6.10)
110
(4.33)
10
(0.39)
130
(5.12)
126
(4.96)
3,5
(0.14)
50
(1.97)
9
(0.35)
24
(0.94)
M8
50
(1.97)
27
(1.06)
8
(0.31)
80
1FK708
194
(7.64)
130
(5.12)
11,5
(0.45)
165
(6.50)
155
(6.10)
3,5
(0.14)
58
(2.28)
11
(0.43)
32
(1.26)
M12
58
(2.28)
35
(1.38)
10
(0.39)
100
1FK710
245
(9.65)
180
(7.09)
13
(0.51)
215
(8.46)
192
(7.56)
4
(0.16)
80
(3.15)
14
(0.55)
38
(1.50)
M12
80
(3.15)
41
(1.61)
10
(0.39)
Encoder systems
without DRIVE-CLiQ interface
Encoder systems
with DRIVE-CLiQ interface
c1
o2
o1
o2
g1
g1
Ød
Øs2
e1
l
Øb1
u
Ø
g2
i2
t
f1
k
k
a1
d6
f
G_NC01_DE_00443
1FK703
1FK704
1FK706
1FK708
1FK710
Motori sincroni 1FK7, generazione 2
200
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.3 Disegni quotati
Resolver with/without DRIVE-CLiQ interface
without bake
with brake
g1
–
g2
–
o2
–
k
LB
o1
–
k
LB
o1
–
80
(3.15)
80
(3.15)
15
(0.59)
153
(6.02)
117
(4.61)
180
(7.09)
144
(5.67)
178
(7.01)
142
(5.59)
205
(8.07)
169
(6.65)
132
(5.20)
85
(3.35)
164
(6.46)
117
(4.61)
160
(6.30)
112
(4.41)
192
(7.56)
144
(5.67)
153
(6.02)
106
(4.17)
189
(7.44)
141
(5.55)
1FK7062-2A
176
(6.93)
128
(5.04)
211
(8.31)
163
(6.42)
1FK7063-2A
198
(7.80)
151
(5.94)
234
(9.21)
186
(7.32)
157
(6.18)
111
(4.37)
209
(8.23)
163
(6.42)
1FK7081-2A
176
(6.93)
130
(5.12)
228
(8.98)
182
(7.17)
1FK7083-2A
195
(7.68)
149
(5.87)
247
(9.72)
201
(7.91)
1FK7084-2A
214
(8.43)
168
(6.61)
266
221
(10.47) (8.70)
169
(6.65)
118
(4.65)
206
(8.11)
155
(6.10)
1FK7101-2A
195
(7.68)
144
(5.67)
247
(9.72)
196
(7.72)
1FK7103-2A
221
(8.70)
170
(6.69)
273
222
(10.75) (8.74)
1FK7105-2A
273
222
(10.75) (8.74)
325
274
(12.80) (10.79)
Shaft Type
height
1FK7 Compact
36
1FK7032-2A
1FK7034-2A
48
1FK7040-2A
90
(3.54)
90
(3.54)
23
(0.91)
1FK7042-2A
63
80
100
1FK7060-2A
1FK7080-2A
1FK7100-2A
103
(4.06)
118
(4.65)
136
(5.35)
104
(4.09)
119
(4.69)
137
(5.39)
23
(0.91)
21
(0.83)
26
(1.02)
1FK7 High Dynamic
36
1FK7033-4C
81
(3.19)
80
(3.15)
15
(0.59)
163
(6.42)
127
(5.00)
190
(7.48)
154
(6.06)
48
1FK7043-4C
90
(3.54)
90
(3.54)
23
(0.9)
186
(7.32)
138
(5.43)
218
(8.58)
170
(6.69)
211
(8.31)
163
(6.42)
243
(9.57)
195
(7.68)
188
(7.40)
141
(5.55)
224
(8.82)
176
(6.93)
252
(9.92)
205
(8.07)
288
240
(11.34) (9.45)
243
(9.57)
197
(7.76)
295
250
(11.61) (9.84)
1FK7044-4C
63
1FK7061-4C
103
(4.06)
104
(4,09)
23
(0.9)
1FK7064-4C
80
1FK708.-4CC 118
(4.65)
119
(4.69)
21
(0.83)
1FK708.-4C
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
201
Dati tecnici e curve caratteristiche
4.3 Disegni quotati
For motor
Dimensions in mm (inches)
Shaft Type
height
DIN a1
IEC P
Shaft extension DE
b1
N
c1
LA
e1
M
f
AB
f1
T
i2
–
s2
S
d
D
d6
–
I
E
t
GA
u
F
1FK7 Compact/High Dynamic
36
1FK703
90
(3.54)
60
(2.36)
8
(0.31)
75
(2.95)
72
(2.83)
3
(0.12)
30
(1.18)
6,5
(0.26)
14
(0.55)
M5
30
(1.18)
16
(0.63)
5
(0.20)
48
1FK704
120
(4.72)
80
(3.15)
10
(0.39)
100
(3.94)
96
(3.78)
3
(0.12)
40
(1.57)
6,5
(0.26)
19
(0.75)
M6
40
(1.57)
21,5
(0.85)
6
(0.24)
63
1FK706
155
(6.10)
110
(4.33)
10
(0.39)
130
(5.12)
126
(4.96)
3,5
(0.14)
50
(1.97)
9
(0.35)
24
(0.94)
M8
50
(1.97)
27
(1.06)
8
(0.31)
80
1FK708
194
(7.64)
130
(5.12)
11,5
(0.45)
165
(6.50)
155
(6.10)
3,5
(0.14)
58
(2.28)
11
(0.43)
32
(1.26)
M12
58
(2.28)
35
(1.38)
10
(0.39)
100
1FK710
245
(9.65)
180
(7.09)
13
(0.51)
215
(8.46)
192
(7.56)
4
(0.16)
80
(3.15)
14
(0.55)
38
(1.50)
M12
80
(3.15)
41
(1.61)
10
(0.39)
Encodersystem with resolver
c1
g1
Øs2
e1
l
Øb1
Ød
Ø
g2
i2
o2
o1
f1
k
a1
d6
f
G_NC01_XX_00452
1FK703
1FK704
1FK706
1FK708
1FK710
Motori sincroni 1FK7, generazione 2
202
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.3 Disegni quotati
Motori 1FK7 con riduttore epicicloidale serie costruttiva SP+
SP+ planetary gearbox
Dimension in mm (inches)
SP+ planetary gearbox
single-stage
-MF1
SP+ planetary gearbox
two-stage
-MF2
D1
F1
L1
D1
F1
L1
Type
Motor
Type
SP060S-
1FT702/1FK702
68
(2.68)
70
(2.76)
89,3
(3.52)
70
(2.76)
60
(2.36)
108
(4.25)
1FT703/1FK703
68
(2.68)
70
(2.76)
94
(3.70)
68
(2.68)
70
(2.76)
116
(4.57)
1FT704/1FK704
91
(3.58)
90
(3.54)
106
(4.17)
–
–
–
1FT702/1FK702
91
(3.58)
90
(3.54)
107,8
(4.24)
95
(3.74)
70
(2.76)
119
(4.69)
1FT703/1FK703
91
(3.58)
90
(3.54)
107,8
(4.24)
95
(3.74)
70
(2.76)
123,4
(4.86)
1FT704/1FK704
91
(3.58)
90
(3.54)
111,5
(4.39)
91
(3.58)
90
(3.54)
135,6
(5.34)
1FT702/1FK702
–
–
–
118
(4.65)
90
(3.54)
142,3
(5.60)
1FT703/1FK703
–
–
–
118
(4.65)
90
(3.54)
142,3
(5.60)
1FT704/1FK704
115
(4.53)
120
(4.72)
122
(4.80)
118
(4.65)
90
(3.54)
146
(5.75)
1FT704/1FK706
115
(4.53)
120
(4.72)
129
(5.08)
115
(4.53)
120
(4.72)
164
(6.46)
1FT704/1FK704
–
–
–
152
(5.98)
120
(4.72)
186,3
(7.33)
1FT706/1FK706
146
(5.75)
150
(5.91)
162,3
(6.39)
152
(5.98)
120
(4.72)
193,3
(7.61)
1FT708/1FK708
146
(5.75)
150
(5.91)
171,3
(6.74)
146
(5.75)
150
(5.91)
220
(8.66)
1FT710/1FK710
146
(5.75)
190
(7.48)
171,3
(6.74)
–
–
–
1FT706/1FK706
–
–
–
212
(8.35)
150
(5.91)
234
(9.21)
1FT708/1FK708
207
(8.15)
210
(8.27)
198
(7.80)
212
(8.35)
150
(5.91)
242,9
(9.56)
1FT710/1FK710
207
(8.15)
210
(8.27)
203,5
(8.01)
212
(8.35)
190
(7.48)
242,9
(9.56)
1FT708/1FK708
–
–
–
215
(8.46)
210
(8.27)
272
(10.71)
1FT710/1FK710
215
(8.46)
190
(7.48)
242
(9.53)
215
(8.46)
210
(8.27)
272
(10.71)
1FT708/1FK708
–
–
–
245
(9.65)
210
(8.27)
297,5
(11.71)
1FT710/1FK710
245
(9.65)
240
(9.45)
273
(10.75)
245
(9.65)
210
(8.27)
297,5
(11.71)
SP075S-
SP100S-
SP140S-
SP180S-
SP210S-
SP240S-
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
203
Dati tecnici e curve caratteristiche
4.3 Disegni quotati
SP+ planetary gearbox
Dimension in mm (inches)
Type
D2
D3
D4
D5
F2
L2
L3
L5
L6
L7
1FT7/1FK7 motor with SP+ planetary gearbox, single-stage/two-stage
SP060S-MF1/-MF2
16
(0.63)
60
(2.36)
68
(2.68)
5,5
(0.22)
62
(2.48)
28
(1.10)
20
(0.79)
6
(0.24)
18
(0.71)
5
(0.20)
SP075S-MF1/-MF2
22
(0.87)
70
(2.76)
85
(3.35)
6,6
(0.26)
83
(3.27)
36
(1.42)
20
(0.79)
7
(0.28)
24,5
(0.96)
6
(0.24)
SP100S-MF1/-MF2
32
(1.26)
90
(3.54)
120
(4.72)
9
(0.35)
112
(4.41)
58
(2.28)
30
(1.18)
10
(0.39)
35
(1.38)
10
(0.39)
SP140S-MF1/-MF2
40
(1.57)
130
(5.12)
165
(6.50)
11
(0.43)
140
(5.51)
82
(3.23)
30
(1.18)
12
(0.47)
43
(1.69)
12
(0.47)
SP180S-MF1/-MF2
55
(2.17)
160
(6.30)
215
(8.46)
13,5
(0.53)
168,5
(6.63)
82
(3.23)
30
(1.18)
15
(0.59)
59
(2.32)
16
(0.63)
SP210S-MF1/-MF2
75
(2.95)
180
(7.09)
250
(9.84)
17
(0.67)
168,5
(6.63)
105
(4.13)
38
(1.50)
17
(0.67)
79,5
(3.13)
20
(0.79)
SP240S-MF1/-MF2
85
(3.35)
200
(7.87)
290
(11.42)
17
(0.67)
168,5
(6.63)
130
(5.12)
40
(1.57)
20
(0.79)
90
(3.54)
22
(0.87)
F1
ØD5
D4
L7
L1
L5
Ø
L3
F2
Ø D3
Ø D2
Ø D1
L2
L6
G_NC01_XX_00449
Motori sincroni 1FK7, generazione 2
204
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Dati tecnici e curve caratteristiche
4.3 Disegni quotati
Motori 1FK7 con riduttore epicicloidale serie costruttiva LP+
LP+ planetary gearbox
Dimension in mm (inches)
Type
Motor
Type
L1
L2
L3
L5
L6
L7
D1
D2
D3
D4
D5
1FK7 with LP+ planetary gearbox
LP050-MO1
1FK702
63
(2.48)
18
(0.71)
6,5
(0.26)
8
(0.31)
13,5
(0.53)
4
(0.16)
50
(1.97)
12
(0.47)
35
(1.38)
44
(1.73)
M4
LP070-MO1
1FK702
83
(3.27)
28
(1.10)
8
(0.31)
10
(0.39)
18
(0.71)
5
(0.20)
70
(2.76)
16
(0.63)
52
(2.05)
62
(2.44)
M5
1FK703
90
(3.54)
1FK704
112
(4.41)
36
(1.42)
10
(0.39)
12
(0.47)
24,5
(0.96)
6
(0.24)
90
(3.54)
22
(0.87)
68
(2.68)
80
(3.15)
M6
1FK706
122
(4.80)
1FK708
132
(5.20)
1FK706
140
(5.51)
58
(2.28)
12
(0.47)
16
(0.63)
35
(1.38)
10
(0.39)
120
(4.72)
32
(1.26)
90
(3.54)
108
(4.25)
M8
1FK708
150
(5.91)
1FK708
168,5
(6.63)
82
(3.23)
15
(0.59)
20
(0.79)
43
(1.69)
12
(0.47)
155
(6.10)
40
(1.57)
120
(4.72)
140
(5.51)
M10
1FK710
188,5
(7.42)
1FK703
1FK704
1FK706
1FK708
1FK710
L3
L1
ØD5/L5 tief
L2
ØD4
LP155-MO1
Ø D1
Ø D3
Ø D2
LP120-MO1
L7
LP090-MO1
L6
G_NC01_DE_00448
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
205
Dati tecnici e curve caratteristiche
4.3 Disegni quotati
Motori sincroni 1FK7, generazione 2
206
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
5
Componenti del motore
5.1
Protezione termica del motore
Per sorvegliare la temperatura del motore, nell'avvolgimento dello statore è integrata una
resistenza termica quale sensore di temperatura.
Tabella 5- 1
Caratteristiche e dati tecnici
Tipo
KTY 84 (termistore)
Resistenza a freddo (20°C)
circa 580 Ω
Resistenza a caldo (100°C)
circa 1000 Ω
Collegamento
tramite il cavo dei segnali
5>N˖@
, ' P$
Figura 5-1
ϑX >r&@
Andamento della resistenza
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
207
Componenti del motore
5.2 Encoder (Opzione)
La valutazione della temperatura dell'avvolgimento avviene nel convertitore. In caso di
anomalie, il convertitore emette il relativo messaggio di errore. Se la temperatura aumenta,
viene emesso un messaggio "Preallarme sovratemperatura motore", che può essere
elaborato esternamente. Se il messaggio viene ignorato, una volta trascorso il tempo
impostato oppure in caso di superamento della temperatura limite del motore o della
temperatura di disinserzione, il convertitore viene disinserito e viene emesso il messaggio di
errore corrispondente.
CAUTELA
La sonda termica integrata protegge solo parzialmente i motori sincroni dai sovraccarichi:
1FK701 ... 1FK704: fino a 2 ∙ I0 (60 K) e velocità ≠ 0
1FK706 ... 1FK710: fino a 4 ∙ I0 (60 K) e velocità ≠ 0
Per carichi termici critici, ad es. in caso di sovraccarico a motore fermo o sovraccarico di
Mmax per più di 4 secondi, la protezione non è più sufficiente. La funzione "Modello motore
termico sorveglianza i2t" va attivata sul convertitore.
Il sensore di temperatura è parte di un circuito elettrico SELV, che può essere
irreparabilmente danneggiato applicando alta tensione. Il sensore di temperatura è realizzato
in accordo con i requisiti DIN/EN in merito alla "separazione galvanica sicura".
5.2
Encoder (Opzione)
5.2.1
Selezione encoder
Sistemi di trasduttori con interfaccia DRIVE-CLiQ
Per i motori con interfaccia DRIVE-CLiQ integrata, il segnale analogico del trasduttore viene
convertito internamente in segnale digitale. Nel sistema di azionamento non è necessaria
nessuna ulteriore conversione del segnale del trasduttore. I motori con interfaccia DRIVECLiQ semplificano la messa in servizio e la diagnostica, essendo possibile identificare
automaticamente il tipo di motore e di encoder.
Sistemi di trasduttori senza interfaccia DRIVE-CLiQ
Per i motori senza interfaccia DRIVE-CLiQ integrata, il segnale analogico del trasduttore
viene convertito in un segnale digitale solo nel sistema di azionamento. Per questi motori, e
per gli encoder esterni, i segnali dei trasduttori devono essere collegati al SINAMICS S110 /
S120 tramite dei Sensor Module.
Motori sincroni 1FK7, generazione 2
208
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Componenti del motore
5.2 Encoder (Opzione)
Tabella 5- 2
Encoder per motori 1FT7
senza DRIVE-CLiQ
con DRIVE-CLiQ
Identificazion
e nel numero
di ordinazione
MLFB
Encoder
Identificazion
e nel numero
di ordinazione
MLFB
-
-
AS24DQI
B
-
-
AM24DQI
C
-
-
AS20DQI
Q
-
-
AM20DQI
R
AM2048S/R
E
AM22DQ
F
AM512S/R
H
AM20DQ
L
Encoder
Posizione assoluta
Posizione
su 4096 giri
assoluta
nell'ambito di un (Multiturn)
giro (Singleturn)
sì
Impiegabili
per Safety
Integrated
Extended
Functions
no
sì
sì
sì
sì
sì
no
sì
sì
sì
sì
sì
sì
sì
sì
sì
sì
AM16S/R
J
AM15DQ
V
sì
sì
no
IC2048S/R
A
IC22DQ
D
no
no
sì
Resolver p=1
T
R14DQ
P
sì
no
no
Resolver p=3
S
R15DQ
U
no
no
no
Resolver p=4
S
R15DQ
U
no
no
no
Non tutti gli encoder sono disponibili per qualsiasi grandezza costruttiva dei motori
Sostituzione dell'encoder
● generale
Nei motori 1FK703 ... 1FK710 il modulo encoder (tranne resolver) si può facilmente sostituire
senza dover ripetere la regolazione.
I motori in questione si possono identificare grazie alla 14ª posizione del numero di
ordinazione.
Gli encoder incrementali vengono sincronizzati ad ogni avvio del sistema.
ATTENZIONE
Gli encoder assoluti devono essere invece nuovamente azzerati quando vengono sostituiti.
● Motori con DRIVE-CLiQ
ATTENZIONE
Dati del motore (targhetta identificativa elettronica)
Occorre assicurarsi che il nuovo encoder contenga i dati del motore corretti, altrimenti il
motore potrebbe compiere movimenti incontrollati e provocare gravi danni materiali.
Un modulo encoder già programmato si può ordinare al Siemens Service Center
specificando il numero di ordinazione e il numero di serie. Se il modulo encoder disponibile
non fa parte di quelli descritti, lo si deve programmare con i dati motore corretti.
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
209
Componenti del motore
5.2 Encoder (Opzione)
5.2.2
Collegamento encoder per motori con interfaccia DRIVE-CLiQ
I motori con interfaccia DRIVE-CLiQ possiedono un Sensor Module interno che contiene una
targhetta elettronica. In questo modo si semplifica la messa in servizio del sistema di
azionamento SINAMICS S110 / S120, dato che tutti i parametri del motore vengono
impostati automaticamente.
AVVERTENZA
I moduli encoder con interfaccia DRIVE-CLiQ o Sensor Module contengono dati specifici
del motore e dell'encoder e anche una targhetta elettronica. Questa può funzionare solo sul
motore originale e non deve essere montata su altri motori o essere sostituita con moduli di
altri motori.
I contatti dell'interfaccia DRIVE-CLiQ toccano direttamente componenti sensibili alle
cariche elettrostatiche (ESD). I collegamenti non devono venire a contatto con le mani o
con utensili che siano caricati elettrostaticamente.
5.2.3
Collegamento encoder per motori senza interfaccia DRIVE-CLiQ
I motori senza interfaccia DRIVE-CLiQ integrata vengono collegati tramite il connettore
flangiato a 17 o 12 poli (vedere il capitolo "Tecnica di collegamento".
5.2.4
Encoder incrementale
Descrizione
Questo trasduttore rileva movimenti relativi e non fornisce un'informazione di posizione
assoluta. In abbinamento con una logica di analisi, tramite la tacca di riferimento esistente
viene determinato un punto zero e da questo punto viene calcolata la posizione assoluta.
Il trasduttore fornisce segnali seno e coseno. Questi possono essere interpolati con una
logica di analisi (di norma 2048 volte) e può essere determinato il senso di rotazione. Per
l'esecuzione con interfaccia DRIVE-CLiQ questa logica di analisi è già integrata nel
trasduttore.
Funzione e dati tecnici
● Sistema di misura angolare per commutazione
● Rilevamento del valore reale di velocità
● Sistema di misura incrementale indiretto per anello di regolazione della posizione
● Un impulso di zero (tacca di riferimento) al giro
Motori sincroni 1FK7, generazione 2
210
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Componenti del motore
5.2 Encoder (Opzione)
Tabella 5- 3
Dati tecnici encoder incrementale
Encoder
Abbreviazion
e
Tensione di
esercizio
Assorbiment Tracce A/B:
o di corrente risoluzione
max.
incrementale
(periodi sen/cos per
ogni rotazione)
Traccia C/D:
posizione
commutazione rotore
(periodi sen/cos per
ogni rotazione)
Errore
angolare
IC2048S/R
5V±5%
140 mA
1 S/R (1 Vpp)
± 80 "
Senza interfaccia DRIVE-CLiQ
1FK701 e 1FK702:
Encoder incrementale sen/cos
1 Vpp 2048 S/R con tracce C e
D
2048 S/R (1 Vpp)
1FK703 ... 1FK710:
Encoder incrementale sen/cos
1 Vpp 2048 S/R con tracce C e
D
± 40 "
con interfaccia DRIVE-CLiQ
1FK701 e 1FK702:
Encoder incrementale 22 bit
(risoluzione 4.194.304,
internamente all'encoder 2048
S/R) + posizione di
commutazione 11 bit
IC22DQ
24 V
180 mA
4.194.304
(=22 bit)
2048 (=11 bit)
± 80 "
1FK703 ... 1FK710:
Encoder incrementale 22 bit
risoluzione 4.194.304,
internamente all'encoder 2048
S/R + posizione di
commutazione 11 bit
± 40 "
Velocità limite meccanica per tutti gli encoder incrementali: 12000 giri/min
Nota: Altri encoder che si possono utilizzare come quelli incrementali nel sistema di azionamento SINAMICS sono gli
"encoder assoluti Singleturn".
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
211
Componenti del motore
5.2 Encoder (Opzione)
8>9@
rHO
$
%
5
rPHFK
rHO
Ǿ
,QNUHPHQWDOVLJQDOH$%6SXU
LQFUHPHQWDOVLJQDOV$%WUDFN
rHO
Ǿ
Ǿ
1XOOLPSXOV5HIHUHQ]VLJQDO
]HURSXOVHUHIHUHQFHVLJQDO
rHOsrHO
8>9@
&
'
5
Ǿ
.RPPXWLHUXQJVODJH&'6SXU
FRPPXWDWLRQSRVLWLRQ&'WUDFN
Ǿ
Ǿ
1XOOLPSXOV5HIHUHQ]VLJQDO
]HURSXOVHUHIHUHQFHVLJQDO
rHO rPHFK
Figura 5-2
Sequenza dei segnali e correlazione per encoder IC2048S/R senza interfaccia DRIVECLiQ con senso di rotazione positivo
Vedere il capitolo "Tecnica di collegamento" per il collegamento encoder, l'assegnazione dei
pin e i cavi.
5.2.5
Encoder assoluto
Descrizione encoder assoluto Multiturn
Questo trasduttore fornisce una posizione angolare assoluta tra 0° e 360° nella risoluzione
indicata. Inoltre tramite un riduttore di misura interno può distinguere fino a 4096 giri. Con
una vite a ricircolo di sfere si può ad es. determinare la posizione assoluta della slitta per un
tratto più lungo.
Descrizione encoder assoluto Singleturn
Questo trasduttore fornisce una posizione angolare assoluta tra 0° e 360° nella risoluzione
indicata. Al contrario del trasduttore assoluto Multiturn, non possiede un riduttore di misura
interno e può fornire quindi solo il valore di posizione nell'ambito di un giro Non dispone di un
campo di movimento.
Motori sincroni 1FK7, generazione 2
212
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Componenti del motore
5.2 Encoder (Opzione)
Funzione e dati tecnici
● Sistema di misura angolare per commutazione
● Rilevamento del valore reale di velocità
● Sistema di misura indiretto per la definizione assoluta della posizione nell'ambito di una
rotazione
● Sistema di misura indiretto per la definizione assoluta della posizione nell'ambito di un
campo di lavoro di 4096 rotazioni
● Per gli encoder Multiturn: Sistema di misura indiretto per la definizione assoluta della
posizione entro un campo di movimento
● Sistema di misura incrementale indiretto per anello di regolazione della posizione
Tabella 5- 4
Dati tecnici encoder assoluto senza interfaccia DRIVE-CLiQ
Denominazione
Abbreviazione
Tensione di
esercizio
Assorbiment
o di corrente
max.
Risoluzione
assoluta
(Singleturn)
Campo di
moviment
o
(Multiturn)
Tracce A/B:
risoluzione
incrementale
(periodi sen/cos per
ogni rotazione)
Errore
angolare
Interfaccia seriale per posizione assoluta: EnDat 2.1
Encoder assoluto 2048
S/R, 4096 giri Multiturn,
con interfaccia EnDat
AM2048S/R
5 V ± 5%
200 mA
8192 (=13 bit)
4096 (=12
bit)
2048 S/R (1 Vpp)
±40"
Encoder assoluto 512
S/R, 4096 giri Multiturn,
con interfaccia EnDat
AM512S/R
5 V ± 5%
200 mA
8192 (=13 bit)
4096 (=12
bit)
512 S/R (1 Vpp)
±80"
Encoder assoluto 16 S/R,
4096 giri Multiturn, con
interfaccia EnDat
AM16S/R
5 V ± 5%
210 mA
8192 (=13 bit)
4096 (=12
bit)
16 S/R (1 Vpp)
±480"
Tabella 5- 5
Dati tecnici encoder assoluto con interfaccia DRIVE-CLiQ
Denominazione
Abbreviazione
Tensione di
esercizio
Assorbimento di
corrente max.
Risoluzione
assoluta
(Singleturn)
Campo di
movimento
(Multiturn)
Errore angolare
Interfaccia seriale per posizione assoluta: DRIVE-CLiQ
Encoder assoluto
Singleturn a 24 bit
AS24DQI
24 V
110 mA
16.777.216 (=24
bit)
-
±40"
Encoder assoluto
24 bit + 12 bit Multiturn
AM24DQI
24 V
110 mA
16.777.216 (=24
bit)
4096 (=12 bit)
±40"
Encoder assoluto
Singleturn a 20 bit
AS20DQI
24 V
110 mA
1.048.576 (=20
bit)
-
±120"
Encoder assoluto 20 bit +
12 bit Multiturn
AM20DQI
24 V
110 mA
1.048.576 (=20
bit)
4096 (=12 bit)
±120"
Encoder assoluto
22 bit + 12 bit Multiturn
AM22DQ
24 V
210 mA
4.194.304 (=22
bit)
4096 (=12 bit)
±40"
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
213
Componenti del motore
5.2 Encoder (Opzione)
Denominazione
Abbreviazione
Tensione di
esercizio
Assorbimento di
corrente max.
Risoluzione
assoluta
(Singleturn)
Campo di
movimento
(Multiturn)
Errore angolare
Encoder assoluto
20 bit + 12 bit Multiturn
AM20DQ
24 V
210 mA
1.048.576 (=20
bit)
4096 (=12 bit)
±80"
Encoder assoluto
15 bit + 12 bit Multiturn
AM15DQ
24 V
210 mA
32.768 (=15 bit)
4096 (=12 bit)
±480"
Velocità limite meccanica per tutti gli encoder assoluti: 12000 giri/min
Per la sequenza dei segnali e la correlazione della traccia A/B, vedere la figura "Encoder
incrementale".
Nota
Riduzione della coppia nominale termicamente ammessa con 1FK701 e 1FK702
Poiché la temperatura d'esercizio massima dei trasduttori assoluti con altezze d-asse 20 e
28 è inferiore a quella dei trasduttori incrementali, la coppia termica nominale ammessa del
motore diminuisce del 10 %.
5.2.6
Resolver
Descrizione
Il numero dei periodi sinusoidali o cosinusoidali per giro corrisponde al numero di coppie
polari del resolver. Nel caso di un resolver bipolare, l'elettronica di analisi può fornire un
ulteriore impulso di zero per giro del trasduttore che consente una chiara correlazione
dell'informazione di posizione rispetto ad un giro del trasduttore. Si può utilizzare un resolver
bipolare come trasduttore Singleturn. I resolver bipolari si possono utilizzare per motori con
qualsiasi numero di poli. Nel caso di resolver multipolari, il numero di coppie polari del
motore e del resolver coincidono sempre. La risoluzione fornita è più elevata di quella dei
resolver bipolari.
Funzione e dati tecnici
● Sistema di misura angolare per commutazione
● Rilevamento del valore reale di velocità
● Sistema di misura incrementale indiretto per anello di regolazione della posizione
Tabella 5- 6
Dati tecnici resolver senza interfaccia DRIVE-CLiQ
Denominazione
Sigla breve
Tensione di eccitazione eff.,
frequenza di eccitazione
Errore angolare
Resolver bipolare
Resolver p=1
2 ... 8 V,
5 ... 10 kHz
±840° per 1FK703 ... 1FK710
±1200° per 1FK701 e 1FK702
Resolver esapolare
Resolver p=3
2 ... 8 V,
5 ... 10 kHz
±420°
Motori sincroni 1FK7, generazione 2
214
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Componenti del motore
5.2 Encoder (Opzione)
Denominazione
Sigla breve
Tensione di eccitazione eff.,
frequenza di eccitazione
Errore angolare
Resolver ottopolare
Resolver p=4
2 ... 8 V,
5 ... 10 kHz
±240°
Rapporto di trasmissione Ü = 0,5 ± 5%
Calcolo dei segnali di uscita
Utraccia sinusoidale = Ü x Ueccitazione × sin α
Utraccia cosenoidale = Ü x Ueccitazione × cos α
α = arctan (Utraccia sinusoidale / Utraccia cosenoidale)
Tabella 5- 7
Dati tecnici resolver con interfaccia DRIVE-CLiQ
Denominazione
Sigla breve
Tensione di
alimentazione
Risoluzione
Errore angolare
Resolver 15 bit
risoluzione 32768,
internamente multipolare
R15DQ
24 V
32.768 (=15 bit)
±420° per esapolare
±240° per ottopolare
Resolver 14 bit
risoluzione 16384,
internamente bipolare
R14DQ
24 V
16.384 (=14 bit)
±840° per 1FK703 ...
1FK710
±1200° per 1FK701 e
1FK702
8VLQ
8FRV
Figura 5-3
Segnali di uscita resolver
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
215
Componenti del motore
5.3 Freno di stazionamento (opzione)
5.3
Freno di stazionamento (opzione)
5.3.1
Proprietà
● Il freno di stazionamento viene utilizzato per bloccare l'albero motore a motore fermo. Il
freno di stazionamento non è un freno di lavoro da attivare per frenare il motore in
rotazione.
● È ammesso il funzionamento come arresto d'emergenza. Si possono eseguire 2000
manovre di frenatura con tre volte il momento d'inerzia del rotore come momento
d'inerzia esterno alla velocità di 3000 giri/min senza che il freno si usuri in modo
inammissibile. Non si può superare la capacità massima di commutazione data per ogni
frenatura di emergenza.
● La tensione nominale del freno di arresto è di 24 V DC.
CAUTELA
La tensione nominale è di 24 V DC +/- 10 %. Le tensioni al di fuori di questa fascia di
tolleranza possono causare dei guasti.
Con una usura non ammessa non è più garantita la funzione di frenatura! Il
superamento delle caratteristiche di frenatura sopra citate o il riavviamento ripetuto del
motore anche per breve tempo con il freno ancora inserito non sono ammessi. I tempi di
risposta del freno e i tempi di commutazione del relè devono essere pertanto tenuti in
considerazione quando si comanda o si abilita l'azionamento.
ATTENZIONE
I motori con o senza il freno di stazionamento non possono essere riattrezzati
successivamente!
La lunghezza dei motori con il freno di stazionamento include anche il rispettivo spazio
di montaggio (vedere i disegni quotati).
Motori sincroni 1FK7, generazione 2
216
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Componenti del motore
5.3 Freno di stazionamento (opzione)
5.3.2
Freni a magneti permanenti
Il campo magnetico dei magneti permanenti provoca una forza di attrazione sulla piastra
armatura del freno. In questo modo il freno viene chiuso nello stato di assenza di corrente e
si blocca l'albero motore.
Con una tensione nominale di 24 V DC sul freno la bobina eccitata genera un campo
contrario. Ciò neutralizza l'effetto dei magneti permanenti; il freno si apre a causa del ritorno
della molla senza coppia residua. Il freno a magneti permanenti presenta un collegamento
resistente alla torsione con il rotore del motore. Pertanto questo tipo di freno è quasi senza
gioco.
CAUTELA
Per i motori con freno di stazionamento integrato a magneti permanenti non è ammessa
alcuna forza assiale sull'estremità dell'albero! Questo vale sia per l'installazione sia durante
il funzionamento.
5.3.3
Collegamento diretto del freno di stazionamento agli apparecchi SINAMICS
Il freno di stazionamento nel motore, in combinazione con il cavo di potenza MOTION
CONNECT con cavo di collegamento del freno integrato, è previsto per un collegamento
diretto al convertitore SINAMICS. Dato che per il cavo del freno nel motore è garantita una
separazione galvanica sicura dall'avvolgimento del motore e che il cavo di potenza è
dimensionato come isolamento rinforzato, in questo caso non sono necessari altri circuiti di
protezione.
5.3.4
Collegamento del freno di stazionamento ad alimentatore esterno tramite
contattore
Il comando del freno può avvenire tramite un alimentatore di tensione esterno. Dato che per
il cavo del freno nel motore è garantita una separazione galvanica sicura dall'avvolgimento
del motore e che il cavo di potenza è dimensionato come isolamento rinforzato, può trattarsi
anche di un alimentatore PELV (PELV = Protective Extra Low Voltage). Per la protezione
della tensione della logica interna, anche il relè K1 tra bobina e contatto deve presentare un
isolamento rinforzato.
In caso di comando esterno occorre prevedere un circuito di protezione del freno (vedere la
figura "Esempio di circuito per l'alimentazione esterna"). Questo circuito di protezione evita
picchi di tensione pericolosi e garantisce il rispetto dei tempi di commutazione specificati
(vedere la tabella "Dati tecnici dei freni di stazionamento utilizzati").
Sul connettore lato motore deve essere disponibile una tensione minima di 24 V DC -10 %
per garantire l'apertura senza problemi del freno. Nel caso in cui venga superata la tensione
massima 24 V DC +10 % il freno può nuovamente chiudersi. Occorre tenere in
considerazione la caduta di tensione sul cavo del freno. A titolo indicativo è possibile
calcolare la caduta di tensione ∆U del cavo di rame procedendo come segue:
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
217
Componenti del motore
5.3 Freno di stazionamento (opzione)
ΔU
[V] = 0,042 ∙ (l/q) ∙ Ifreno
I = lunghezza cavo [m]
q = sezione del conduttore del freno [mm2]
Ifreno= corrente continua del freno in [A]
CAUTELA
Per evitare sovratensioni alla disinserzione e le relative possibili influenze sull'impianto si
deve integrare sul cavo di alimentazione un circuito di protezione (vedere l'esempio
seguente).
.
)
0RWRUH
9
8
5
.&RQWDWWRUH
),QWHUUXWWRUHDXWRPDWLFRGLSRWHQ]D
6)UHQRGLVWD]LRQDPHQWR
59DULVWRUH
6
*1'
Figura 5-4
Tabella 5- 8
Esempio di collegamento per l'alimentazione esterna con circuito di protezione
Esempio: Componenti elettronici per il circuito d'esempio
Compone
nte
Esempi
elett.
F
Interruttore automatico 3RV10 con in serie le
sbarre di corrente (eventualmente con integrato
i contatti ausiliari 3RV1901 per segnalazione
all'azionamento)
oppure
Interruttore modulare 5SX21 (eventualmente
con integrato i contatti ausiliari per
segnalazione all'azionamento)
K1
Contattore ausiliario 3RH11
oppure
Contattore 3RT10
R2
Varistore SIOVS14K30 (EPCOS)
Motori sincroni 1FK7, generazione 2
218
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Componenti del motore
5.3 Freno di stazionamento (opzione)
5.3.5
Tabella 5- 9
Tipo di
motore
Dati tecnici del freno di stazionamento
Dati tecnici dei freni di stazionamento
Coppia di
stazionamento
M4
[Nm]
Coppia
dinamica
M1m
Corrente
continua
[Nm]
Tempo di
apertura
Tempo di
chiusura
T0
con varistore
tc1
[ms]
[ms]
[J]
[A]
Frequenza di
commutazione
massima
Freni a magnete permanente per 1FK7 Compact, High Dynamic e High Inertia
1FK701☐
0,4
0,3
0,3
30
20
2
1FK702☐
1
0,7
0,3
30
20
8
1FK703☐
1,9
1
0,3
50
30
40
1FK704⃞
4
3
0,5
70
30
150
1FK706⃞
13
8,5
0,8
100
50
380
1FK708⃞
22
11
0,9
200
60
1400
1FK7100
23
11
1,0
300
70
3380
1FK7101
43
25
1,0
300
70
3380
1FK7103
1FK7105
7HQVLRQH8
&RUUHQWH,
)UHQRVEORFFDWR
,
8
W
W
WHPSRGLDSHUWXUD
Figura 5-5
W F
W
PLVXUDFRQ9 9
W
F WHPSRGLFKLXVXUD
Tempi per il funzionamento di arresto
Coppia di stazionamento M4
La coppia di stazionamento M4 è la maggiore coppia consentita con la quale il freno inserito
durante il funzionamento statico può essere sottoposto a carico senza slittamento (funzione
di stazionamento a motore fermo).
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
219
Componenti del motore
5.4 Resistenze di frenatura (funzione di frenatura mediante cortocircuito dell'armatura)
Coppia di frenatura dinamica M1m
La coppia di frenatura dinamica M1m è la minore coppia di frenatura dinamica media che può
verificarsi durante l'arresto di emergenza.
5.4
Resistenze di frenatura (funzione di frenatura mediante cortocircuito
dell'armatura)
In caso di superamento dei valori di tensione del circuito intermedio o di un guasto
all'elettronica non è più possibile frenare elettricamente il convertitore PWM a transistori. Nel
caso in cui la rotazione incontrollata dell'azionamento sia fonte di pericolo, è allora possibile
frenare il motore mediante cortocircuito dell'indotto La frenatura mediante cortocircuito
dell'indotto dovrebbe essere eseguita nel campo di movimento dell'asse di avanzamento, al
più tardi, tramite il finecorsa.
Nel calcolo del percorso di fuga dell'asse d'avanzamento vanno considerati sia l'attrito della
meccanica che i tempi di commutazione dei contattori. Per evitare danni meccanici è
necessario predisporre degli ammortizzatori all'estremità del campo di movimento assoluto.
Per i servomotori con freno di stazionamento integrato è possibile diseccitare
contemporaneamente il freno di stazionamento al fine di poter creare, anche se con un
leggero ritardo, un'ulteriore coppia di frenatura.
CAUTELA
In ogni caso è necessario che sul convertitore sia eseguita la cancellazione impulsi prima
che si attivi o disattivi il contattore di cortocircuito dell'indotto. Si evita in questo modo che i
contatti del contattore possano bruciarsi e che il convertitore sia danneggiato.
AVVERTENZA
La frenatura durante il funzionamento normale deve essere sempre effettuata mediante
l'ingresso del valore di riferimento. Per ulteriori informazioni consultare il manuale di
progettazione del convertitore.
Tramite il cortocircuito dell'indotto con una resistenza esterna adattata è possibile ottimizzare
la coppia di frenatura del servomotore nel funzionamento come generatore.
Possibile indirizzo di riferimento: http://www.frizlen.com
Nota
Naturalmente si possono utilizzare anche prodotti equivalenti di altri fornitori. Le ditte
menzionate sopra non sono in alcun modo imposte, ma solo consigliate. Siemens non si
assume alcuna responsabilità per la qualità dei prodotti di terze parti.
Motori sincroni 1FK7, generazione 2
220
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Componenti del motore
5.4 Resistenze di frenatura (funzione di frenatura mediante cortocircuito dell'armatura)
5EU
6,1$0,&6
8 9 :
0
a
Figura 5-6
Circuito (principio) con resistenze di frenatura
Potenza nominale
La potenza costruttiva delle resistenze deve essere compatibile con la relativa caricabilità I2t.
La potenza costruttiva delle resistenze deve essere dimensionata in modo tale che si possa
raggiungere in breve tempo (max. 500 ms) una temperatura superficiale di 300 °C. Per
evitare che la resistenza venga danneggiata, è ammessa una operazione di frenatura dalla
velocità nominale al max. ogni 2 minuti. Altri cicli di frenatura vanno indicati al momento
dell'ordinazione. Determinante per il calcolo sono il momento d'inerzia esterno e il momento
d'inerzia proprio.
Per la determinazione della potenza nominale è necessario indicare l'energia cinetica al
momento dell'ordinazione.
:
˶
- ˶
ವ ವ
:
-
˶
Q
ವ˭
ವQ
HQHUJLDFLQHWLFD>:V@
PRPHQWRGLLQHU]LD>NJP@
YHORFLW¢DQJRODUH>V@
QXPHURGLJLUL>PLQ@
Calcolo del tempo di frenatura
W% WHPSRGLIUHQDWXUD>V@
7HPSRGLIUHQDWXUD W%
-WRWವQ
ವ0%
Q YHORFLW¢GLIXQ]LRQDPHQWR>JLULPLQ@
0% FRSSLDGLIUHQDWXUDPHGLD>1P@
-WRW PRPHQWRG
LQHU]LD>NJP@
0RPHQWRG
LQHU]LD -WRW -PRW-HVW
-PRW PRPHQWRG
LQHU]LDPRWRUH>NJP@
-HVW PRPHQWRG
LQHU]LDHVWHUQR>NJP@
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
221
Componenti del motore
5.4 Resistenze di frenatura (funzione di frenatura mediante cortocircuito dell'armatura)
ATTENZIONE
Per la determinazione del percorso di fuga vanno considerati ad es. l'attrito (in MB come
fattore di maggiorazione) degli elementi di trasmissione meccanica e i tempi di ritardo di
commutazione dei contattori. Per evitare danni meccanici è necessario predisporre degli
ammortizzatori all'estremità del campo di movimento assoluto degli assi macchina.
6HQ]DUHVLVWHQ]DGLIUHQDWXUDHVWHUQD
&RQUHVLVWHQ]DGLIUHQDWXUDHVWHUQD
0EU
0EU
0EURWW
0EUHII
0EUHII
0EURWW
Q1
Q1
9HORFLW¢Q
,EU
,EU
,EUHII
,EUHII
Q1
Q1
9HORFLW¢Q
9HORFLW¢Q
9HORFLW¢Q
9HORFLW¢Q
Q1
Q1
7HPSRGLDUUHVWRW
Figura 5-7
9HORFLW¢Q
7HPSRGLDUUHVWRW
Frenatura mediante cortocircuito dell'indotto
Motori sincroni 1FK7, generazione 2
222
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Componenti del motore
5.4 Resistenze di frenatura (funzione di frenatura mediante cortocircuito dell'armatura)
5.4.1
Dimensionamento delle resistenze di frenatura
Con il loro dimensionamento si ottiene un tempo di frenatura ottimale. Nelle tabelle sono
riportate anche le relative coppie di frenatura risultanti. I dati sono validi per le frenature a
partire dalla velocità nominale e dal momento d'inerzia Jest = J mot. Se il motore viene frenato
passando ad un'altra velocità, il tempo di frenatura non può essere calcolato in modo
proporzionale. Possono verificarsi tuttavia tempi di frenatura superiori se la velocità di
frenatura è inferiore alla velocità nominale.
I dati riportati nelle seguenti tabelle sono calcolati per i valori nominali indicati nei dati tecnici.
La tolleranza dovuta alla fabbricazione e la saturazione del ferro non sono state prese in
considerazione. A causa della saturazione si possono riscontrare correnti e coppie più
elevate di quelle calcolate.
1FK7 Compact
Tabella 5- 10 Frenatura reostatica per 1FK7 Compact
Tipo di motore
Resistenza
di frenatura
esterna
Coppia di frenatura media
Coppia di
frenatura
max.
Corrente di frenatura effettiva
senza
con
senza
con
Ropt [Ω]
resistenza di
frenatura
esterna
Mfr eff [Nm]
resistenza di
frenatura
esterna
Mfr eff (Ropt) [Nm]
Mfr max [Nm]
resistenza di
frenatura
esterna
Ifr eff [A]
resistenza di
frenatura
esterna
Ifr eff (Ropt)[A]
1FK7011-5AK71
2,3
0,13
0,14
0,17
2,5
2,3
1FK7015-5AK71
6,2
0,23
0,28
0,35
2,6
2,3
1FK7022-5AK71
4,1
1,0
1,2
1,5
5,9
5,4
1FK7032-2AK71
11,3
1,0
1,4
1,8
4,7
4,3
1FK7034-2AK71
11,8
1,5
2,2
2,7
5,8
5,3
1FK7040-2AK71
17,9
0,5
1,0
1,3
3,6
3,2
1FK7042-2AC71
18,2
1,6
2,1
2,7
2,6
2,4
1FK7042-2AF71
17,3
1,3
2,1
2,6
3,5
3,2
1FK7042-2AK71
9,7
0,8
2,1
2,6
7,1
6,4
1FK7060-2AC71
10,0
2,6
4,4
5,5
5,4
4,9
1FK7060-2AF71
8,2
2,1
4,4
5,5
7,7
6,9
1FK7060-2AH71
6,5
1,6
4,4
5,5
11,0
9,8
1FK7062-2AC71
15,5
3,6
6,6
8,2
5,4
4,9
1FK7062-2AF71
8,0
2,8
6,6
8,2
9,7
8,7
1FK7062-2AH71
5,5
2,1
6,5
8.1
14,5
13,0
1FK7063-2AC71
6,7
4,7
8,8
10,9
9,7
8,7
1FK7063-2AF71
4,7
3,7
8,8
11,0
14,6
13,1
1FK7063-2AH71
3,3
2,8
8,7
10,8
21,7
19,5
1FK7080-2AF71
9,8
2,1
5,9
7,3
8,4
7,5
1FK7080-2AH71
6,5
1,6
5,9
7,3
12,9
11,6
1FK7081-2AC71
8,6
4,1
9,3
11,6
9,0
8,1
1FK7081-2AF71
4,4
3,2
9,3
11,6
15,8
14,2
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
223
Componenti del motore
5.4 Resistenze di frenatura (funzione di frenatura mediante cortocircuito dell'armatura)
Tipo di motore
Resistenza
di frenatura
esterna
Coppia di frenatura media
senza
con
Ropt [Ω]
resistenza di
frenatura
esterna
Mfr eff [Nm]
resistenza di
frenatura
esterna
Mfr eff (Ropt) [Nm]
3,0
2,4
1FK7083-2AC71
4,7
1FK7083-2AF71
4,0
1FK7083-2AH71
Coppia di
frenatura
max.
Corrente di frenatura effettiva
senza
con
Mfr max [Nm]
resistenza di
frenatura
esterna
Ifr eff [A]
resistenza di
frenatura
esterna
Ifr eff (Ropt)[A]
9,4
11,7
23,9
21,4
5,9
13,7
17,1
14,9
13,3
4,6
13,8
17,1
20,2
18,1
2,9
3,3
13,6
17,0
29,7
26,6
1FK7084-2AC71
4,4
7,3
17,7
21,9
17,4
15,6
1FK7084-2AF71
3,4
5,5
17,6
21,9
24,9
22,3
1FK7100-2AC71
4,8
5,2
13,8
17,1
15,0
13,4
1FK7100-2AF71
4,3
4,0
13,7
17,1
19,7
17,6
1FK7101-2AC71
3,2
8,2
22,5
28,0
23,4
21,0
1FK7101-2AF71
2,1
6,1
22,4
27,9
36,4
32,6
1FK7103-2AC71
3,0
10,3
30,5
37,9
28,2
25,3
1FK7103-2AF71
1,4
7,9
30,6
38,0
51,4
46,0
1FK7105-2AC71
1,7
17,9
50,6
62,8
48,2
43,1
1FK7105-2AF71
1,1
13,3
50,2
62,4
70,0
66,2
1FK7081-2AH71
Tabella 5- 11 Frenatura reostatica per 1FK7 Compact su Power Module 1 AC 230 V
Tipo di motore
Resistenza
di frenatura
esterna
Coppia di frenatura media
Coppia di
frenatura
max.
Corrente di frenatura effettiva
senza
con
Ropt [Ω]
resistenza di
frenatura
esterna
Mfr eff [Nm]
resistenza di
frenatura
esterna
Mfr eff (Ropt) [Nm]
senza
con
Mfr max [Nm]
resistenza di
frenatura
esterna
Ifr eff [A]
resistenza di
frenatura
esterna
Ifr eff (Ropt)[A]
1FK7011-5AK21
6,9
0,13
0,14
0,17
1,4
1,3
1FK7015-5AK21
19,1
0,23
0,28
0,34
1,5
1,3
1FK7022-5AK21
4,4
1,0
1,1
1,4
5,7
5,2
1FK7032-2AF21
3,5
1,2
1,3
1,7
4,3
4,0
1FK7034-2AF21
3,3
2,1
2,2
2,8
5,9
5,5
1FK7042-2AF21
3,6
1,9
2,8
3,4
8,4
7,6
Motori sincroni 1FK7, generazione 2
224
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Componenti del motore
5.4 Resistenze di frenatura (funzione di frenatura mediante cortocircuito dell'armatura)
1FK7 High Dynamic
Tabella 5- 12 Frenatura reostatica per 1FK7 High Dynamic
Tipo di motore
Resistenza
di frenatura
esterna
Coppia di frenatura media
senza
con
Ropt [Ω]
resistenza di
frenatura
esterna
Mfr eff [Nm]
resistenza di
frenatura
esterna
Mfr eff (Ropt) [Nm]
17,2
0,5
1FK7043-4CH71
8,4
1FK7043-4CK71
6,3
1FK7044-4CF71
Coppia di
frenatura
max.
Corrente di frenatura effettiva
senza
con
Mfr max [Nm]
resistenza di
frenatura
esterna
Ifr eff [A]
resistenza di
frenatura
esterna
Ifr eff (Ropt)[A]
0,9
1,1
3,3
3,0
1,1
2,6
3,3
7,3
6,5
0,9
2,6
3,3
9,9
8,8
7,4
1,7
3,4
4,2
7,0
6,3
1FK7044-4CH71
6,4
1,4
3,4
4,2
9,5
8,5
1FK7061-4CF71
9,7
0,7
2,5
3,1
5,6
5,0
1FK7061-4CH71
7,2
0,5
2,5
3,1
8,1
7,2
1FK7064-4CC71
6,2
1,7
5,0
6,2
8,0
7,2
1FK7064-4CF71
5,3
1,3
5,1
6,3
10,8
9,7
1FK7064-4CH71
4,2
1,0
5,0
6,3
15,0
13,4
1FK7085-4CC71
3,8
3,2
10,3
12,8
14,8
13,2
1FK7085-4CF71
2,2
2,4
10,3
12,8
24,0
21,5
1FK7086-4CC71
3,1
7,4
21,3
26,5
23,2
20,7
1FK7086-4CF71
1,8
5,6
21,1
26,3
37,6
33,6
1FK7033-4CK71
Tabella 5- 13 Frenatura reostatica per 1FK7 High Dynamic su Power Module 1 AC 230 V
Tipo di motore
Resistenza
di frenatura
esterna
Coppia di frenatura media
senza
con
Ropt [Ω]
resistenza di
frenatura
esterna
Mfr eff [Nm]
resistenza di
frenatura
esterna
Mfr eff (Ropt) [Nm]
1FK7033-4CF21
6,9
0,7
1FK7043-4CF21
5,2
1,4
Coppia di
frenatura
max.
Corrente di frenatura effettiva
senza
con
Mfr max [Nm]
resistenza di
frenatura
esterna
Ifr eff [A]
resistenza di
frenatura
esterna
Ifr eff (Ropt)[A]
0,9
1,1
3,3
3,0
2,6
3,3
7,3
6,5
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
225
Componenti del motore
5.5 Riduttore
1FK7 High Inertia
Tabella 5- 14 Frenatura reostatica per 1FK7 High Inertia
Tipo di motore
Resistenza
di frenatura
esterna
Coppia di frenatura media
senza
con
Ropt [Ω]
resistenza di
frenatura
esterna
Mfr eff [Nm]
resistenza di
frenatura
esterna
Mfr eff (Ropt) [Nm]
1FK7042-3BK71
9,7
0,8
1FK7060-3BF71
8,2
1FK7062-3BF71
8,0
1FK7081-3BF71
Coppia di
frenatura
max.
Corrente di frenatura effettiva
senza
con
Mfr max [Nm]
resistenza di
frenatura
esterna
Ifr eff [A]
resistenza di
frenatura
esterna
Ifr eff (Ropt)[A]
2,1
2,6
7,1
6,4
2,1
4,4
5,5
7,7
6,9
2,8
6,6
8,2
9,7
8,7
4,4
3,2
9,3
11,6
15,8
14,2
1FK7084-3BC71
4,4
7,3
17,7
21,9
17,4
15,6
1FK7084-3BF71
3,4
5,5
17,6
21,9
24,9
22,3
5.5
Riduttore
5.5.1
Dimensionamento dei riduttori
Sommario
● Vanno considerate le seguenti grandezze:
– Coppia di accelerazione, coppia continuativa, numero cicli, tipo di ciclo, velocità
d'ingresso ammessa, posizione di montaggio, gioco di rotazione, rigidità di rotazione,
forze radiali e assiali.
– I riduttori a vite senza fine sono adatti solo in parte al funzionamento reversibile con
servoapplicazioni.
● I dati tecnici sono riportati tra l'altro nei cataloghi del costruttore del riduttore.
● Se l'olio del riduttore tocca la flangia del motore, è necessario scegliere una guarnizione
della flangia e del motore adatta.
Dimensionamento per il funzionamento S3
Per la progettazione è possibile utilizzare la curva caratteristica del motore senza riduzione.
Rispettare la coppia massima e il numero di giri di ingresso ammesso del riduttore.
Mmot = Mab / (i ⋅ ηG)
L'abbinamento motore-cambio avviene in base a: Mmax, riduttore ≥ M0 (100 K) ∙ i ∙ f
Motori sincroni 1FK7, generazione 2
226
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Componenti del motore
5.5 Riduttore
Mmax, riduttore
Massima coppia di azionamento ammissibile
M0 (100 K)
Coppia da fermo del motore
i
Rapporto di trasmissione
f
Fattore di maggiorazione = f1 ∙ f2
f1 = 2
per la coppia di accelerazione del motore
f2 = 1
con ≤1000 cicli di inserzione/h del riduttore
f2 > 1
con > 1000 cicli di inserzione/h (vedere il catalogo riduttori)
p. es.f2 = 1,5
per 3000 cicli di inserzione/h
f2 = 1,8
per 5000 cicli di inserzione/h
f2 = 2,0
per 8000 cicli di inserzione/h
ATTENZIONE
I cicli di inserzione possono essere anche vibrazioni sovrapposte! Il fattore di
maggiorazione (f2) non risulta sufficiente per il dimensionamento e si possono verificare
guasti al riduttore.
Il sistema completo va ottimizzato in modo che siano minimizzate le vibrazioni sovrapposte.
0RWRUHVLQFURQR
5LGXWWRUH
L
Q$
Q0RW
Figura 5-8
Q0RW
Q$
Rapporto di trasmissione
Tramite la coppia di carico e la velocità di avviamento necessaria, vengono determinate la
coppia e il numero di giri di uscita del riduttore e con esse anche la potenza di uscita.
Da ciò si ottiene la potenza azionamento necessaria:
Pab [W] = Pmot [W] ∙ ηG = (π/30) ∙ Mmot [Nm] ∙ nmot [1/min] ∙ ηG
Dimensionamento per il funzionamento S1
Il riduttore genera di per sé calore per attrito e impedisce la dissipazione del calore tramite la
flangia del motore. Deve essere pertanto prevista una riduzione della coppia nel
funzionamento in S1.
La coppia motore necessaria si calcola con la formula seguente:
M0RW =
(
MDE
+ M 9 )2 - M92
i• *
PLt
M9 = a • b •
n0RW
(160
*
)•
k 72
R6WUZ
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
227
Componenti del motore
5.5 Riduttore
MMot
Coppia motore [Nm]
MV
"Perdita di coppia" [Nm] calcolata
a
π/3 per motori alimentati sinusoidalmente 1FT7/1FK7
b
Fattore ponderale per perdite del riduttore (senza dimensioni); b = 0,5
ηG
Efficienza del riduttore
i
Rapporto riduttore (i > 1)
kT
Costante di coppia [Nm/A]
Mab
Coppia azionamento riduttore [Nm]
nA
Numero di giri di uscita del riduttore [1/min]
nMot
Numero di giri del motore [1/min]
Rfase
Resistenza a caldo della fase del motore [Ω]; RStrw = 1,4 • Rfase (vedere il
capitolo "Dati tecnici e curve caratteristiche")
Pab
Potenza azionamento riduttore [W]
PMot
Potenza del motore [W]
π
Pi greco = 3,1416
0>1P@
0RGLILFDFXUYDFDUDWWHULVWLFD6SHU).WUDPLWHPRQWDJJLR
GHOULGXWWRUHFRQUHQGLPHQWR
&DUDWWHULVWLFD6.
&DUDWWHULVWLFD6FRQULGXWWRUH
&DUDWWHULVWLFD6.
Figura 5-9
Q>JLULPLQ@
Esempio: 1FK7083 con riduttore angolare (curva caratteristica)
Avvertenza per ulteriori curve caratteristiche: S1Riduttore = S1100 K - (S1100 K - S160 K) / 2
Comportamento all'avviamento di un motore con montaggio del riduttore
ATTENZIONE
Per la messa in servizio va calcolato un maggiore assorbimento di corrente dovuto al
comportamento di lubrificazione (distribuzione insufficiente di grasso e olio) e di
assestamento degli anelli di tenuta dell'albero.
Motori sincroni 1FK7, generazione 2
228
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Componenti del motore
5.5 Riduttore
5.5.2
Motori con riduttore planetario
5.5.2.1
Caratteristiche della serie costruttiva SP+
Panoramica
I motori 1FK7 possono essere accoppiati con facilità ai riduttori epicicloidali in modo da
costituire unità di azionamento coassiali compatte. I riduttori vengono accoppiati
direttamente sulla flangia lato DE dei motori.
Per la scelta bisogna osservare che il n. di giri massimo del motore non superi il n. di giri
massimo ammesso all'ingresso del riduttore. Con commutazioni molto frequenti bisogna
osservare il fattore supplementare f2. Nella progettazione è necessario tenere conto delle
perdite per attrito del riduttore.
I riduttori sono forniti solo in versione non equilibrata.
Vantaggi
● Elevato rendimento:
> 97% a 1 stadio
> 94% a 2 stadi
● Gioco angolare minimo:
≤ 4 arcmin a 1 stadio
≤ 6 arcmin a 2 stadi
● Ripartizione della potenza dalla ruota planetaria ai satelliti
● Grazie alla ripartizione simmetrica delle forze non subentrano flessioni sugli alberi dei
satelliti.
● Basso momento d'inerzia; quindi rapidi tempi di accelerazione dei motori.
● Cuscinetto lato albero per grandi carichi radiali ed assiali con cuscinetto conico a rulli
pretensionato.
● I riduttori vengono fissati all'albero motore mediante il giunto elastico integrato. A tal
scopo è necessario un albero motore dall'estremità liscia. È sufficiente la tolleranza di
eccentricità N secondo DIN 42955 e il livello del grado di vibrazione A secondo EN
60034-14. La flangia del motore viene adattata con apposita piastra.
● Albero d'uscita del riduttore esattamente coassiale con il motore
● I riduttori sono chiusi (guarnizione verso il motore nel riduttore) e sono stati riempiti di olio
in fabbrica. Essi sono lubrificati e a tenuta per tutta la loro durata. I riduttori sono adatti
per qualsiasi posizione di montaggio.
● Grado di protezione del riduttore: IP65
● Dimensioni contenute
● Peso ridotto
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
229
Componenti del motore
5.5 Riduttore
Integrazione
I riduttori abbinati ai singoli motori nonché i rapporti di riduzione fornibili per queste
combinazioni motore-riduttore sono riportati nella seguente tabella di scelta. In fase di scelta
è necessario attenersi alla velocità massima di ingresso ammissibile del riduttore (identica
alla velocità massima del motore).
Le combinazioni motore-riduttore proposte nelle seguenti tabelle di scelta sono concepite
innanzitutto per l'esercizio ciclico S3-60% (durata dell'inserzione ≤ 60% e ≤ 20 min). Per
l'impiego in funzionamento continuo S1 (tempo di inserzione > 60% oppure > 20 min)
valgono velocità massime del motore e coppie di uscita ridotte. La temperatura di 90 °C del
riduttore non deve essere mai superata.
I motori 1FK7 devono essere realizzati nel modo seguente per il montaggio del riduttore:
● Estremità d'albero liscia
● Grado di protezione IP65
● Verniciatura
– Per i motori 1FK702 è richiesta una verniciatura
– I motori 1FK703 ... 1FK710 esistono solo verniciati
Motori sincroni 1FK7, generazione 2
230
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Componenti del motore
5.5 Riduttore
5.5.2.2
Dati per la scelta e l'ordinazione della serie costruttiva SP+
Dati per la scelta e l'ordinazione del riduttore epicicloidale a 1 stadio serie costruttiva SP+
0RWRU
3ODQHWDU\JHDUER[
VLQJOHVWDJH
7\SH
7\SH
7RUVLRQDO *HDUER[
EDFNODVK ZHLJKW
DSSUR[
DUFPLQ
).
$YDLODEOH
JHDUUDWLR L
0RWRU
2XWSXWWRUTXH
VSHHGPD[ PD[
6
6
NJOE
6360) ื 5DGLDORXWSXW
VKDIWORDGLQJ
PD[
$[LDORXWSXW
VKDIWORDGLQJ
PD[
Q*
0*
)U
)D
Q
7%
)5PD[
)$PD[
USP
1POE IIW
1OE I
1OE I
).
).
).
IRUL ).
).
).
).
6360) ื IRUL ).
).
).
).
).
6360) ื IRUL ).
).
).
).
).
).
6360) ื IRUL ).
).
).
).
6360) ื IRUL ).
6360) ื IRUL IRUL ದ
*HDUVKDIW
:LWKILWWHGNH\
:LWKRXWILWWHGNH\
ದ
ದ
2UGHUFRGH
-
-
-
-
ದ
-
-
-
-
3UHFRQGLWLRQV
:LWKWKHIROORZLQJPRWRUYHUVLRQV63SODQHWDU\JHDUER[HVFDQ
EHPRXQWHG
ವ 3ODLQPRWRUVKDIWH[WHQVLRQ
VKDIWDQGIODQJHDFFXUDF\WROHUDQFH1
ZLWKRXWZLWKKROGLQJEUDNH
ವ ,3GHJUHHRISURWHFWLRQ
:KHQRUGHULQJDPRWRUZLWKJHDUER[ =VKRXOGEHDGGHGWRWKH
RUGHUQXPEHU
([DPSOH
).PRWRUZLWKRXWKROGLQJEUDNH
ZLWKVLQJOHVWDJH63SODQHWDU\JHDUER[
ZLWK L DQGJHDUVKDIWZLWKRXWILWWHGNH\
).$)$*=-
63SODQHWDU\JHDUER[HVFDQWKHUHIRUHRQO\EHRUGHUHGZLWK
WKHVH).PRWRUV
).ഋഋഋഋഋഋഋഋ*
).ഋഋഋഋഋഋഋഋ+
IRU).ഋ ).ഋഋഋഋഋഋ*
).ഋഋഋഋഋഋ+
3RVVLEOH
ದ 1RWSRVVLEOH
,QUHIHUHQFHWRWKHRXWSXWVKDIWFHQWHU
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
231
Componenti del motore
5.5 Riduttore
Dati tecnici del riduttore epicicloidale a 1 stadio serie costruttiva SP+
3ODQHWDU\JHDUER[ZLWK).PRWRU
6LQJOHVWDJH
7\SH
*HDU
UDWLR
0RWRU
VSHHG
2XWSXW
WRUTXH
&RQWLQXRXVGXW\6
63 60)
63 60)
63 60)
63 60)
63 60)
63 60)
0RPHQWVRILQHUWLDRIJHDUER[UHIHUUHGWRWKHGULYH
).
).
).
).
).
).
Q1
0171
-
-
-
-
-
-
USP
1P
OE IIW
NJFP OE ILQ
NJFP OE ILQ
NJFP OE ILQ
NJFP OE ILQ
NJFP OE ILQ
NJFP OE ILQ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
7KHOLPLWYDOXHVLQWKHWDEOHDSSO\IRU6FRQWLQXRXVGXW\21WLPH! RU! PLQIRUDPD[LPXPJHDUER[WHPSHUDWXUHRI r&r)
Motori sincroni 1FK7, generazione 2
232
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Componenti del motore
5.5 Riduttore
Dati per la scelta e l'ordinazione del riduttore epicicloidale a 2 stadi serie SP+
0RWRU
3ODQHWDU\JHDUER[
WZRVWDJH
7\SH
7\SH
7RUVLRQDO *HDUER[
EDFNODVK ZHLJKW
DSSUR[
DUFPLQ
).
$YDLODEOH
JHDUUDWLR L
6360) ื ದ
ದ
6360) ื ).
).
).
ದ
ದ
ದ
ದ
ದ
ದ
).
).
).
).
6360) ื ).
).
).
).
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
2XWSXWWRUTXH 5DGLDORXWSXW $[LDORXWSXW
PD[
VKDIWORDGLQJ VKDIWORDGLQJ
6
PD[
PD[
Q*
0*
)U
)D
Q
7%
)5PD[
)$PD[
USP
1POE IIW
1OE I
1OE I
ದ
).
).
).
).
NJOE
).
).
).
0RWRUVSHHG
PD[
6
6360) ื ).
).
).
).
).
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
:LWKRXWILWWHGNH\
ದ
ದ
).
).
).
).
*HDUVKDIW
:LWKILWWHGNH\
ದ
ದ
ದ
ದ
ದ
2UGHUFRGH
- -
-
-
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
-
-
-
-
-
-
3UHFRQGLWLRQV
:LWKWKHIROORZLQJPRWRUYHUVLRQV63SODQHWDU\JHDUER[HVFDQ
EHPRXQWHG
ವ 3ODLQPRWRUVKDIWH[WHQVLRQ
VKDIWDQGIODQJHDFFXUDF\WROHUDQFH1
ZLWKRXWZLWKKROGLQJEUDNH
ವ ,3GHJUHHRISURWHFWLRQ
:KHQRUGHULQJDPRWRUZLWKJHDUER[ =VKRXOGEHDGGHGWRWKH
RUGHUQXPEHU
([DPSOH
).PRWRUZLWKRXWKROGLQJEUDNH
ZLWKVLQJOHVWDJH63SODQHWDU\JHDUER[
ZLWK L DQGJHDUVKDIWZLWKRXWILWWHGNH\
).$)$*=-
63SODQHWDU\JHDUER[HVFDQWKHUHIRUHRQO\EHRUGHUHGZLWK
WKHVH).PRWRUV
).ഋഋഋഋഋഋഋഋ*
).ഋഋഋഋഋഋഋഋ+
IRU).ഋ ).ഋഋഋഋഋഋ*
).ഋഋഋഋഋഋ+
3RVVLEOH
ದ 1RWSRVVLEOH
5HIHUUHGWRWKHFHQWHURIWKHRXWSXWVKDIWDWUSP
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
233
Componenti del motore
5.5 Riduttore
0RWRU
3ODQHWDU\JHDUER[
WZRVWDJH
7\SH
7\SH
7RUVLRQDO *HDUER[
EDFNODVK ZHLJKW
DSSUR[
DUFPLQ
).
).
).
$YDLODEOH
JHDUUDWLR L
6360) ื ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
).
).
).
).
).
).
).
6360) ื ದ
ದ
ದ
).
).
).
6360) ื NJOE
).
).
).
).
).
).
).
).
).
).
*HDUVKDIW
:LWKILWWHGNH\
:LWKRXWILWWHGNH\
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
2UGHUFRGH
- -
-
-
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
-
-
-
-
-
-
3UHFRQGLWLRQV
:LWKWKHIROORZLQJPRWRUYHUVLRQV63SODQHWDU\JHDUER[HVFDQ
EHPRXQWHG
ವ 3ODLQPRWRUVKDIWH[WHQVLRQ
VKDIWDQGIODQJHDFFXUDF\WROHUDQFH1
ZLWKRXWZLWKKROGLQJEUDNH
ವ ,3GHJUHHRISURWHFWLRQ
0RWRU
2XWSXWWRUTXH
VSHHGPD[ PD[
6
6
5DGLDORXWSXW $[LDORXWSXW
VKDIWORDGLQJ VKDIWORDGLQJ
PD[
PD[
Q*
0*
)U
Q
7%
)5PD[
)$PD[
USP
1POE IIW
1OE I
1OE I
IRUL IRUL IRUL )D
:KHQRUGHULQJDPRWRUZLWKJHDUER[ =VKRXOGEHDGGHGWRWKH
RUGHUQXPEHU
([DPSOH
).PRWRUZLWKRXWKROGLQJEUDNH
ZLWKVLQJOHVWDJH63SODQHWDU\JHDUER[
ZLWK L DQGJHDUVKDIWZLWKRXWILWWHGNH\
).$)$*=-
63SODQHWDU\JHDUER[HVFDQWKHUHIRUHRQO\EHRUGHUHGZLWK
WKHVH).PRWRUV
).ഋഋഋഋഋഋഋഋ*
).ഋഋഋഋഋഋഋഋ+
IRU).ഋ ).ഋഋഋഋഋഋ*
).ഋഋഋഋഋഋ+
3RVVLEOH
ದ 1RWSRVVLEOH
,QUHIHUHQFHWRWKHRXWSXWVKDIWFHQWHU
Motori sincroni 1FK7, generazione 2
234
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Componenti del motore
5.5 Riduttore
Dati tecnici del riduttore epicicloidale a 2 stadi serie costruttiva SP+
3ODQHWDU\JHDUER[ZLWK).PRWRU
7ZRVWDJH
7\SH
*HDU
UDWLR
0RWRU
VSHHG
2XWSXW
WRUTXH
&RQWLQXRXVGXW\6
63 60)
63 60)
63 60)
63 60)
63 60)
63 60)
63 60)
0RPHQWVRILQHUWLDRIJHDUER[UHIHUUHGWRWKHGULYH
).
).
).
).
).
).
Q1
0171
-
-
-
-
-
-
USP
1P
OE IIW
NJFP OE ILQ
NJFP OE ILQ
NJFP OE ILQ
NJFP OE ILQ
NJFP OE ILQ
NJFP OE ILQ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
ದ
7KHOLPLWYDOXHVLQWKHWDEOHDSSO\IRU6FRQWLQXRXVGXW\21WLPH! RU! PLQIRUDPD[LPXPJHDUER[WHPSHUDWXUHRI r&r)
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
235
Componenti del motore
5.5 Riduttore
5.5.2.3
Caratteristiche della serie costruttiva LP+
Panoramica
I motori 1FK7 possono essere accoppiati a riduttori epicicloidali, in modo da formare un'unità
motore-riduttore coassiale compatta. I riduttori vengono accoppiati direttamente sulla flangia
lato DE dei motori.
Per la scelta bisogna osservare che il n. di giri massimo del motore non superi il n. di giri
massimo ammesso all'ingresso del riduttore. Con commutazioni molto frequenti bisogna
osservare il fattore supplementare f2. Nella progettazione è necessario tenere conto delle
perdite per attrito del riduttore.
I riduttori vengono forniti non equilibrati e con la chiavetta.
Vantaggi
● Elevato rendimento a 1 stadio: > 97 %
● Gioco torsionale minimo a 1 stadio: ≤ 12 min. ang.
● Ripartizione della potenza dalla ruota planetaria ai satelliti
● Grazie alla ripartizione simmetrica delle forze non subentrano flessioni sugli alberi dei
satelliti
● I riduttori vengono fissati all'albero motore mediante il giunto elastico integrato. A tal
scopo è necessario un albero motore dall'estremità liscia. È sufficiente la tolleranza di
eccentricità N secondo DIN 42955 e il livello del grado di vibrazione A secondo EN
60034-14. La flangia del motore viene adattata con apposita piastra.
● Albero d'uscita del riduttore esattamente coassiale con il motore
● I riduttori sono adatti per qualsiasi posizione di montaggio.
● I riduttori sono chiusi (tenuta verso il motore nel riduttore) e riempiti di grasso in fabbrica.
Essi sono lubrificati e a tenuta per tutta la loro durata.
● Grado di protezione del riduttore: IP64
● Dimensioni contenute
● Peso ridotto
Integrazione
I motori sincroni 1FK702☐ ... 1FK710☐ possono essere forniti dalla fabbrica (SIEMENS)
completi di riduttore epicicloidale montato su flangia.
La tabella dati di scelta e ordinazione riporta i riduttori assegnati ai singoli motori e i rapporti
di riduzione disponibili per queste combinazioni motore-azionamento. In fase di scelta è
necessario attenersi alla velocità massima di ingresso ammissibile del riduttore (identica alla
velocità massima del motore).
Motori sincroni 1FK7, generazione 2
236
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Componenti del motore
5.5 Riduttore
Le combinazioni motore-riduttore proposte nelle tabelle di scelta sono concepite innanzitutto
per l'esercizio ciclico S3 - 60% (durata dell'inserzione ≤ 60% e ≤ 20 min). Per l'impiego in
funzionamento continuo S1 (tempo di inserzione > 60% oppure > 20 min) valgono velocità
massime del motore e coppie di uscita ridotte. La temperatura di 90 °C del riduttore non
deve essere mai superata.
I motori 1FK7 devono essere realizzati nel modo seguente per il montaggio del riduttore:
● Estremità d'albero liscia
● Grado di protezione IP64
● Verniciatura
– Per i motori 1FK702 è richiesta una verniciatura
– I motori 1FK703 ... 1FK710 esistono solo verniciati
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
237
Componenti del motore
5.5 Riduttore
5.5.2.4
Dati per la scelta e l'ordinazione della serie costruttiva LP+
0RWRU
3ODQHWDU\JHDUER[/3
VLQJOHVWDJH
7RUVLRQDOEDFNODVKื DUFPLQ
7\SH
7\SH
*HDUER[
ZHLJKWDSSUR[
$YDLODEOH
JHDUUDWLR L
/302
).
).
).
).
/302
).
).
).
).
/302
).
).
).
).
).
/302
).
).
).
).
).
).
/302
2XWSXW
WRUTXH
PD[
6
6
NJ
OE
).
,QSXWVSHHG
PD[
ದ
2XWSXWVKDIW
UDGLDOIRUFH
PD[
*HDUER[
PRPHQWRI
LQHUWLD
Q*
0*
DWL 0*
DWL )U
-*
DWL USP
1P
OE IIW
1P
OE IIW
1
OE I
NJP OE ILQV
ದ
ದ
).
).
).
).
ದ
ದ
ದ
*HDUVKDIW
:LWKILWWHGNH\
2UGHUFRGH
9
9
3UHFRQGLWLRQV
&RQWLQXRXVGXW\
:LWKWKHIROORZLQJPRWRUYHUVLRQV/3SODQHWDU\JHDUER[HVFDQ
EHPRXQWHG
ವ 3ODLQPRWRUVKDIWH[WHQVLRQ
VKDIWDQGIODQJHDFFXUDF\WROHUDQFH1
ZLWKRXWZLWKKROGLQJEUDNH
ವ ,3GHJUHHRISURWHFWLRQ
&RQWLQXRXVGXW\LVSHUPLVVLEOHDWWKHUDWHGVSHHGDQGUDWHG
WRUTXH7KHJHDUER[WHPSHUDWXUHPD\QRWH[FHHG r&
r)
/3SODQHWDU\JHDUER[FDQWKHUHIRUHRQO\EHRUGHUHGZLWKWKHVH
).PRWRUV
).ഋഋഋഋഋഋഋഋ*
).ഋഋഋഋഋഋഋഋ+
IRU).ഋ ).ഋഋഋഋഋഋ*
).ഋഋഋഋഋഋ+
:KHQRUGHULQJDPRWRUZLWKJHDUER[ =VKRXOGEHDGGHGWRWKH
RUGHUQXPEHU
3ODQHWDU\JHDUER[/3
VLQJOHVWDJH
7RUVLRQDOEDFNODVK
ื DUFPLQ
5DWHGLQSXW
VSHHG
5DWHG
RXWSXW
WRUTXH
7\SH
Q*
0*
DWL 0*
DW L USP
1POE IIW
1POE IIW
/302
/302
ದ
/302
([DPSOH
/302
).PRWRUZLWKKROGLQJEUDNHZLWKVLQJOHVWDJH/3
SODQHWDU\JHDUER[ZLWK L DQGJHDUVKDIWZLWKILWWHGNH\
).%.$+=9
/302
3RVVLEOH
ದ 1RWSRVVLEOH
5HIHUUHGWRWKHFHQWHURIWKHRXWSXWVKDIWDWUSP
Motori sincroni 1FK7, generazione 2
238
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Componenti del motore
5.6 Giunto di accoppiamento
5.6
Giunto di accoppiamento
Descrizione delle funzioni
Per poter disporre di una caratteristica d'azionamento ottimale si consiglia l'uso di giunti
ROTEXⓇ GS della ditta KTR. I vantaggi offerti dai giunti ROTEXⓇ GS sono:
● rigidità torsionale 2... 4 volte superiore a quella di un riduttore a cinghia
● nessun ingranamento dei denti (rispetto al riduttore a cinghia)
● momento d'inerzia minimo
● buon comportamento in regolazione
La compatibilità ottimale deve essere determinata anche in base alle masse della macchina
disponibili, alla meccanica utilizzata, alla rigidità della macchina, ecc.
La ditta KTR fornisce assistenza per la scelta dell'accoppiamento, vedere http://www.ktr.com
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
239
Componenti del motore
5.6 Giunto di accoppiamento
Motori sincroni 1FK7, generazione 2
240
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
6
Tecnica di collegamento
6.1
Periferia di azionamento SINAMICS
'5,9(&/L4
)URPOHIWWRULJKW
7HUPLQDO0RGXOHV
2SWLRQ%RDUGV
&RQWURO8QLW
6PDUW/LQHRGHU$FWLYH/LQH0RGXOH
'RXEOH0RWRU0RGXOH
6LQJOH0RWRU0RGXOH
0RWRUVZLWK
'5,9(&/L4
LQWHUIDFH
027,21&211(&7SRZHUFDEOH
027,21&211(&7VLJQDOFDEOH
'5,9(&/L4
'5,9(&/L4027,21&211(&7
Figura 6-1
6.2
6HQVRU
0RGXOH
0RWRUVZLWKRXW
'5,9(&/L4
LQWHUIDFH
Esempio: Panoramica del sistema SINAMICS S120
Collegamento della potenza
AVVERTENZA
Prima di iniziare qualsiasi lavoro sul motore accertarsi che questo sia disinserito e protetto
contro il riavviamento!
I motori non sono adatti per il collegamento diretto a rete.
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
241
Tecnica di collegamento
6.2 Collegamento della potenza
Assegnazione dei pin del connettore di potenza sul motore
&ROOHJDPHQWRGLSRWHQ]DSHU89:
&RQQHVVLRQHIUHQR%'%'VRORLQFDVRGLRUGLQD]LRQH
*UDQGH]]DFRQQHWWRUH
*UDQGH]]DFRQQHWWRUH
*1<(
9
%'
8
%'
%'
*1<(
:
8
%'
:
Figura 6-2
%'
9
9
:
8
*UDQGH]]DFRQQHWWRUH
%'
*1<(
Collegamento della potenza
Avvertenze per il collegamento
La compatibilità elettromagnetica del sistema è assicurata solo utilizzando cavi di potenza
schermati.
Occorre considerare le schermature nel progetto di messa a terra di protezione. I conduttori
non collegati o i cavi a rischio di contatto devono essere collegati a terra. Se i cavi per il
collegamento del freno compresi negli accessori SIEMENS non vengono utilizzati, i relativi
conduttori e gli schermi dovranno essere collegati alla massa dell'armadio. (I cavi non
collegati generano carichi capacitativi!)
Provvedere allo scarico di tiro dei cavi di collegamento.
Motori sincroni 1FK7, generazione 2
242
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Tecnica di collegamento
6.2 Collegamento della potenza
Capacità di carico di corrente dei cavi di potenza e di segnale
La capacità di carico di corrente dei cavi in rame con isolamento in PVC/PUR è valida per i
tipi di posa B1, B2 e C alle condizioni di funzionamento continuo riportate nella tabella con
una temperatura ambiente dell'aria di 40 °C. Per altre temperature ambiente, i valori devono
essere ricavati utilizzando i fattori riportati nella tabella di "Fattori di derating".
Tabella 6- 1
Sezione dei cavi e capacità di carico di corrente
Sezione
Capacità di carico di corrente effettiva AC 50/60 Hz o DC per tipo di posa
[mm2]
B1 [A]
B2 [A]
C [A]
Elettronica (secondo EN 60204-1)
0,20
-
4,3
4,4
0,50
-
7,5
7,5
0,75
-
9
9,5
Potenza (secondo EN 60204-1)
0,75
8,6
8,5
9,8
1,00
10,3
10,1
11,7
1,50
13,5
13,1
15,2
2,50
18,3
17,4
21
4
24
23
28
6
31
30
36
10
44
40
50
16
59
54
66
25
77
70
84
35
96
86
104
50
117
103
125
1)
Valori estrapolati
Tabella 6- 2
Fattori di derating per i cavi di potenza e di segnale
Temperatura ambiente dell'aria [°C]
Fattore di derating secondo EN 60204-1, tabella D1
30
1,15
35
1,08
40
1,00
45
0,91
50
0,82
55
0,71
60
0,58
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
243
Tecnica di collegamento
6.3 Collegamento del segnale
6.3
Collegamento del segnale
È preferibile collegare i sistemi trasduttore al SINAMICS tramite DRIVE-CLiQ.
A tale scopo sono disponibili i motori con interfaccia DRIVE-CLiQ. I motori con interfaccia
DRIVE-CLiQ devono essere collegati direttamente al relativo Motor Module tramite i cavi
MOTION-CONNECT DRIVE-CLiQ disponibili. Il collegamento del cavo MOTION-CONNECT
DRIVE-CLiQ viene eseguito sul motore con grado di protezione IP67. L'interfaccia DRIVECLiQ alimenta il trasduttore motore tramite l'alimentatore integrato CC 24 V e trasmette
direttamente alla Control Unit i segnali del trasduttore motore e della temperatura nonché i
dati elettronici di targa, p. es. il numero di identificazione e i dati nominali (tensione, corrente,
coppia) univoci. Per i diversi tipi di trasduttore il cablaggio viene solitamente effettuato
tramite il cavo MOTION-CONNECT DRIVE CLiQ. Questi motori semplificano la messa in
servizio e la diagnostica essendo possibile l'identificazione automatica del tipo di motore e
del trasduttore.
Collegamento dell'encoder nei motori con DRIVE-CLiQ
I motori con DRIVE-CLiQ possono essere collegati direttamente al relativo Motor Module del
motore attraverso i cavi DRIVE-CLiQ (MOTION-CONNECT) disponibili. I dati vengono
trasmessi direttamente alla Control Unit.
'5,9(&/L4
(
0RWRU
0RGXOH
0
a
˽
&DYRGLSRWHQ]D
6,1$0,&66
4XDGURGLFRPDQGR
0RWRUH
Figura 6-3
Esempio: Collegamento dell'encoder con DRIVE-CLiQ
Motori sincroni 1FK7, generazione 2
244
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Tecnica di collegamento
6.3 Collegamento del segnale
Cavi nei motori con DRIVE-CLiQ
Per tutti i tipi di encoder viene utilizzato con DRIVE-CLiQ lo stesso cavo. Si devono utilizzare
solo cavi confezionati di Siemens (MOTION-CONNECT).
Tabella 6- 3
Cavo confezionato
6FX ☐ 002
- ☐DC☐☐
- ☐☐
☐
0
↓
↓↓↓
↓
Lunghezza
5 MOTION-CONNECT
500
max. lunghezza del cavo 100 m
8 MOTION-CONNECT
800
Lunghezza max. del cavo 50 m
Collegamento dell'encoder nei motori senza DRIVE-CLiQ
Nei motori senza interfaccia DRIVE-CLiQ, l'encoder di velocità e il sensore di temperatura
vengono collegati tramite un connettore del segnale.
I motori senza DRIVE-CLiQ operanti con un sistema di azionamento SINAMICS S110 / S120
richiedono un Sensor Module Cabinet (SMC). Il motore viene collegato tramite il cavo di
segnale all'SMC. L'SMC viene collegato al Motor Module tramite un cavo DRIVE-CLiQ
(MOTION-CONNECT).
&DYRGLVHJQDOH
'5,9(&/L4
(
0RWRU
0RGXOH
6HQVRU0RGXOH&DELQHW60&
0
a
˽
&DYRGLSRWHQ]D
6,1$0,&66
,PSLDQWRGLGLVWULEX]LRQH
0RWRUH
Figura 6-4
Esempio: Collegamento dell'encoder senza DRIVE-CLiQ
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
245
Tecnica di collegamento
6.3 Collegamento del segnale
Encoder incrementale ed encoder assoluto senza DRIVE-CLiQ
Tabella 6- 4
N. PIN
Assegnazione dei pin della spina a gomito a 17 poli con contatti pin
Encoder
incrementale
Vista lato connettore (pin)
Encoder assoluto
IC2048S/R
AM2048S/R
1
A
A
2
A*
A*
3
R
data
4
D*
not connected
5
C
clock
AM512S/R
AM32S/R
AM16S/R
6
C*
not connected
7
M–Encoder
M-Encoder
8
+1R1
+1R1
9
–1R2
–1R2
10
P–Encoder
P–Encoder
11
B
B
12
B*
B*
13
R*
data*
14
D
clock*
15
0 V Sense
0 V Sense
16
5 V Sense
5 V Sense
17
not connected
not connected
Motori sincroni 1FK7, generazione 2
246
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Tecnica di collegamento
6.3 Collegamento del segnale
Resolver senza DRIVE-CLiQ
Tabella 6- 5
Assegnazione dei pin del connettore flangiato a 12-17 poli
N. PIN
Descrizione dei segnali
a 12 poli
Vista lato connettore (pin)
a 17 poli
Grandezza connettore 1 per Grandezza connettore 0,5
1FK702⃞ ... 1FK710⃞
per 1FK701⃞
1
S2
+1R1
2
S4
–1R2
3
not connected
not connected
4
not connected
S1
5
not connected
S3
6
not connected
not connected
7
R2
S2
8
+1R1
S4
9
–1R2
not connected
10
R1
R1
11
S1
R2
12
S3
not connected
13
---
not connected
14
---
not connected
15
---
not connected
16
---
not connected
17
---
not connected
Grandezza connettore 1
grandezza connettore 0,5
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
247
Tecnica di collegamento
6.3 Collegamento del segnale
Cavi nei motori senza DRIVE-CLiQ
Si consiglia di utilizzare solo cavi confezionati di marca Siemens (MOTION-CONNECT).
Questi offrono, rispetto ai cavi confezionati propri, molti vantaggi relativi alla sicurezza di
funzionamento, alla qualità e ai costi.
Tabella 6- 6
Cavi
Motore
Tipo di connettore
Dimension
e
connettore
1FK701
SPEED-CONNECT
0,5
1FK702
1FK703
Dado con collare
SPEED-CONNECT
1FK704
1
1
Cavi 4) Encoder
incrementale
Cavi 4) Encoder assoluto
Cavi 4)
Resolver
6FX⃞002-2CN20-⃞⃞⃞0
6FX⃞002-2EN20-⃞⃞⃞0
6FX⃞002-2FN20-⃞⃞⃞0
2)
2)
1)
6FX⃞002-2CA31-⃞⃞⃞0
6FX⃞002-2EG10-⃞⃞⃞0
6FX⃞002-2CF02-⃞⃞⃞0
1)
1)
3)
6FX⃞002-2CQ31-⃞⃞⃞0
6FX⃞002-2EQ31-⃞⃞⃞0
-
1)
1)
1FK706
1FK708
1FK710
1) lunghezza max. del cavo 100 m
2) lunghezza max. del cavo 50 m
3) lunghezza max. del cavo resolver multipolare 50 m, resolver bipolare 130 m
4) 6FX5 = MOTION-CONNECT 500, 6FX8 = MOTION-CONNECT 800
Per ulteriori dati tecnici e per i codici relativi alle varie lunghezze consultare il catalogo,
capitolo "Tecnica di collegamento MOTION-CONNECT".
Motori sincroni 1FK7, generazione 2
248
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Tecnica di collegamento
6.4 Bloccaggio rapido
6.4
Bloccaggio rapido
I motori si possono collegare con un sistema di bloccaggio rapido (SPEED-CONNECT). I
connettori del motore sono realizzati in maniera da poter utilizzare sia i nuovi cavi ad
aggancio rapido, sia i cavi tradizionali con attacco a vite.
1+2
Realizzazione del contatto elettrico del connettore SPEED-CONNECT
3
Raccordo a vite
4
SPEED-CONNECT
5
Connettore motore con SPEED-CONNECT
Figura 6-5
6.5
Bloccaggio rapido
Capacità torsionale dei connettori sul motore
I connettori di potenza e quelli di segnale possono subire una torsione limitata. Per ruotare il
connettore maschio angolare è possibile utilizzare il connettore adatto. Per non danneggiare
i contatti è necessario chiudere avvitare completamente il connettore. Negli encoder con
Sensor Module integrato (DQI) l'uscita cavo superiore è fissa.
ATTENZIONE
Torsione dei connettori
Il grado di rotazione consentito non deve essere superato.
Al fine di garantire il grado di protezione sono consentite al massimo 10 torsioni.
La torsione va eseguita con un controconnettore adatto alla filettatura del connettore. Il
Sensor Module va ruotato solo a mano. Non è consentito utilizzare pinza, martello e
simili.
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
249
Tecnica di collegamento
6.5 Capacità torsionale dei connettori sul motore
Tabella 6- 7
Direzione di torsione e coppia di torsione massima
Connettore maschio
Grado di torsione
Coppia di torsione max.
Connettore di potenza grandezza 0,5
270°
8 Nm
Connettore di potenza grandezza 1
270°
12 Nm
230° per 1FK701
180° per 1FK702
8 Nm
12 Nm
270°
8 Nm
Connettore di segnale (senza DRIVECLiQ)
Connettore di segnale (con DRIVE-CLiQ)
1
Connettore dei segnali
2
Connettore di potenza
Figura 6-6
Torsione ammessa dei connettori per 1FK701/1FK702
Motori sincroni 1FK7, generazione 2
250
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Tecnica di collegamento
6.5 Capacità torsionale dei connettori sul motore
Torsione ammessa del connettore di potenza nei motori con interfaccia DRIVE-CLiQ senza Sensor
Module 1FK7□□□-□□□□□-□X□□; X = B, C, Q, R
Tabella 6- 8
Grado di rotazione del connettore di potenza
Motore
Angolo α
Angolo β
1FK703
122°
208°
1
1FK704
1FK706
1FK708
1FK710
135°
195°
1
195°
140°
1,5
1FK708
1FK710
Grandezza connettore
Disegno
˞
˟
Torsione ammessa dei connettori nei motori senza DRIVE-CLiQ e in quelli con interfaccia DRIVECLiQ tramite Sensor Module
1FK7□□□-□□□□□-□X□□; X = A, E, H, D, F, L
Tabella 6- 9
Grado di rotazione del connettore di potenza
Motore
Angolo α
Angolo β
1FK703
122°
158°
Grandezza connettore
1
1FK704
1FK706
1FK708
135°
140°
1
1FK710
135°
195°
1
1FK708
1FK710
195°
140°
1,5
Disegno
˞
˟
˞
˟ಬ
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
251
Tecnica di collegamento
6.5 Capacità torsionale dei connettori sul motore
Tabella 6- 10 Grado di rotazione del connettore di segnale
Motore
Con DRIVE-CLiQ tramite
Sensor Module
Connettore senza DRIVE-CLiQ
Angolo α´
Angolo β´
Angolo α´
Angolo β´
1FK703
160°
130°
160°
135°
1FK704
145°
140°
145°
130°
1FK706
140°
145°
150°
135°
1FK708
1FK710
105°
100°
105°
105°
Disegno
Vedere la tabella "Connettori di
potenza"
Tabella 6- 11 Coppia di torsione max. prodotta
Connettore maschio
Coppia di torsione max.
Connettore di potenza grandezza 1
12 Nm
Connettore di potenza grandezza 1,5
20 Nm
Connettore di segnale (senza DRIVE-CLiQ)
12 Nm
Connettore di segnale (con DRIVE-CLiQ)
8 Nm
Motori sincroni 1FK7, generazione 2
252
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
7
Avvertenze sull'uso dei motori
7.1
Trasporto / immagazzinaggio nel periodo precedente all'utilizzo
I motori vanno conservati in ambienti interni asciutti e a ridotta presenza di polvere e
vibrazioni (veff < 0,2 mm/s). È opportuno che l'immagazzinaggio dei motori a temperatura
ambiente (da +5 °C a +40 °C) non abbia una durata superiore a 2 anni, di modo che venga
mantenuto l'effetto dell'ingrassaggio dei cuscinetti.
Per il trasporto e l'immagazzinaggio rispettare le altre avvertenze riportate nelle istruzioni
operative.
7.2
Condizioni ambientali
Campo della temperatura di funzionamento: -15 °C ... +40 °C (senza limitazione).
Tutti i dati elencati si riferiscono ad una temperatura ambiente di 40 °C, ad una struttura
termica non isolata e ad una altitudine di installazione fino a 1000 m s.l.m.
In condizioni diverse (temperatura ambiente > 40 °C o altitudine di installazione > 1000 m
s.l.m.), la coppia/le potenze ammesse devono essere determinate in base ai fattori riportati
nella tabella seguente.
La temperatura ambiente e l'altitudine di installazione si arrotondano a 5 °C o 500 m.
Tabella 7- 1
Fattori per la riduzione di coppia/potenza
Altitudine di installazione
s.l.m. [m]
Temperatura ambiente in °C
< 30
30 - 40
45
50
55
1000
1,07
1,00
0,96
0,92
0,87
1500
1,04
0,97
0,93
0,89
0,84
2000
1,00
0,94
0,90
0,86
0,82
2500
0,96
0,90
0,86
0,83
0,78
3000
0,92
0,86
0,82
0,79
0,75
3500
0,88
0,82
0,79
0,75
0,71
4000
0,82
0,77
0,74
0,71
0,67
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
253
Avvertenze sull'uso dei motori
7.3 Posa dei cavi in ambienti umidi
7.3
Posa dei cavi in ambienti umidi
ATTENZIONE
ULFKWLJ
Figura 7-1
SHUPLWWHG
6,(0(16
6,(0(16
QLFKWHUODXEW
6,(0(16
6,(0(16
6,(0(16
6,(0(16
Se il motore è installato in un ambiente umido, i conduttori di potenza e di segnale devono
essere disposti come nella figura seguente.
QRWSHUPLWWHG
Schema di posa dei cavi in ambienti umidi
Motori sincroni 1FK7, generazione 2
254
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Avvertenze sull'uso dei motori
7.4 Forme costruttive
7.4
Forme costruttive
Tabella 7- 2
Definizione delle forme costruttive (secondo IEC 60034-7)
Denominazione
Rappresentazione
Descrizione
IM B5
Standard
IM V1
I motori 1FK7 possono essere impiegati, senza
ordinazione specifica,
anche nelle forme costruttive IM V1 e IM V3.
Nota:
In fase di progettazione della forma costruttiva IM
V3 è necessario verificare le sollecitazioni assiali
consentite (peso degli elementi d'azionamento) e
in particolare il grado di protezione necessario.
IM V3
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
255
Avvertenze sull'uso dei motori
7.5 Condizioni di montaggio
7.5
Condizioni di montaggio
Grazie all'accoppiamento del motore alla superficie di montaggio, una parte della potenza
dissipata dal motore viene eliminata tramite la flangia.
Struttura non isolata termicamente
Per i dati motore elencati valgono le seguenti condizioni di montaggio:
Tabella 7- 3
Condizioni per il montaggio non isolato termicamente
Altezza d'asse
Piastra in acciaio, larghezza x altezza x spessore
[mm]
Superficie di
montaggio [m2]
1FK701⃞
120 x 100 x 10
0,012
1FK702⃞ ... 1FK704⃞
120 x 100 x 40
0,012
1FK706⃞ ... 1FK710⃞
450 x 370 x 30
0,17
Se le superfici di montaggio sono più estese, la dissipazione del calore migliora
notevolmente.
Struttura isolata termicamente senza parti aggiuntive
La coppia motore deve essere ridotta del 5 % ... 10 % nel caso di motori a raffreddamento
naturale. Per la progettazione, si consiglia di utilizzare i valori M0 (60 K). Con velocità
crescente, aumenta il fattore di riduzione (vedere la figura "Influenza delle condizioni di
montaggio sulla curva caratteristica S1")
Struttura isolata termicamente con parti aggiuntive
● Freno di stazionamento (integrato nel motore) Non è necessaria alcuna ulteriore
riduzione di coppia
● Riduttori; è necessaria una riduzione di coppia (vedere la figura "Influenza delle
condizioni di montaggio sulla curva caratteristica S1")
Motori sincroni 1FK7, generazione 2
256
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Avvertenze sull'uso dei motori
7.6 Sollecitazione da vibrazioni
Effetto del montaggio isolato e non isolato termicamente con e senza riduttore
VHQ]DULGXWWRUH
0
FRQULGXWWRUH
FD
1RQLVRODWR
6WUXWWXUD
,VRODWR
6WUXWWXUD
Q
Q1
Figura 7-2
7.6
Influenza delle condizioni di montaggio sulla curva caratteristica S1
Sollecitazione da vibrazioni
Per garantire il funzionamento corretto e il rispetto delle specifiche del motore (in particolare
della durata di vita dei cuscinetti), i valori delle vibrazioni riportati nella tabella seguente non
devono essere superati.
Tabella 7- 4
Valori delle vibrazioni
Velocità delle vibrazioni Veff secondo ISO 10816
max. 4,5 mm/s
Accelerazione delle vibrazioni apeak assiale
1)
25 m/s2
Accelerazione delle vibrazioni apeak radiale 1)
50 m/s2
1) Nei motori con ventilazione forzata il valore limite per l'accelerazione delle vibrazioni assiale e
radiale è pari a 10 m/s2.
I punti di misura devono essere scelti in base a ISO 10816-1 par. 3.2. In nessun punto di
misura i valori delle vibrazioni devono superare i valori limite.
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
257
Avvertenze sull'uso dei motori
7.7 Forme di rete consentite
Figura 7-3
Punti di misura dei valori delle vibrazioni
La valutazione dell'accelerazione delle vibrazioni avviene nell'intervallo di frequenze 10 ...
2000 Hz. Nell'intervallo di tempo viene considerato il valore di picco massimo.
Per valutare la velocità delle vibrazioni l'equipaggiamento di misura deve soddisfare i
requisiti della norma ISO 2954.
7.7
Forme di rete consentite
I motori sono omologati congiuntamente al sistema di azionamento per operare su reti TN e
TT con centro stella messo a terra, nonché su reti IT.
Nel funzionamento su reti IT la comparsa di un primo errore tra una parte attiva e la terra
deve essere segnalata da un dispositivo di monitoraggio. La norma IEC 60364-4-41
raccomanda di eliminare al più presto il primo errore.
Nelle reti con conduttore esterno messo a terra occorre inserire un trasformatore di
isolamento con centro stella messo a terra (lato secondario) tra rete e sistema di
azionamento, in modo da evitare sollecitazioni non ammesse dell'isolamento del motore. Dal
momento che prevalgono le reti TT con conduttore di linea messo a terra, è necessario
impiegare un trasformatore di isolamento.
Motori sincroni 1FK7, generazione 2
258
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Appendice
A.1
A
Definizione dei concetti
Coppia nominale MN
Coppia continuativa termica ammissibile nel servizio S1 con velocità nominale del motore.
Velocità nominale nN
Mediante la velocità nominale viene definito nel diagramma velocità-coppia il campo di
velocità caratteristico per il motore.
Corrente nominale IN
Corrente di ramo effettiva del motore per generare la corrispondente coppia nominale.
Indicazione del valore effettivo di una corrente sinusoidale.
Corrente nominale del convertitore IN Inv
Corrente di uscita effettiva del convertitore (per ramo) che viene fornita in maniera
continuativa dal modulo motore suggerito. Il Motor Module consigliato viene specificato con
la corrente da fermo I0 (100K).
Coppia di frenatura Mfr eff
Mfr eff corrisponde alla coppia di frenatura media durante la frenatura mediante cortocircuito
dell'armatura che viene raggiunta mediante la resistenza di frenatura Ropt collegata a monte.
Resistenza di frenatura Ropt
Ropt corrisponde al valore di resistenza ottimale per ogni ramo collegato esternamente in
serie all'avvolgimento del motore in caso di funzione di frenatura mediante cortocircuito
dell'armatura.
IT
Drive End = lato azionamento del motore
Induttanza del campo rotante LD
L'induttanza del campo rotante è costituita dalla somma dell'induttanza del traferro d'aria e
dell'induttanza parassita, riferita al circuito equivalente a un solo ramo. Essa si compone
dell'induttanza propria di un ramo e dell'induttanza di accoppiamento verso gli altri rami.
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
259
Appendice
A.1 Definizione dei concetti
Costante di coppia kT (valore con una sovratemperatura media di 100 K)
Quoziente della coppia e della corrente da fermo.
Calcolo:
kT = M0, 100 K / I0, 100 K
La costante vale fino a circa 2 ∙ M0, 60 K per motori con raffreddamento
naturale
Nota
Questa costante non è valida per la progettazione delle correnti nominali e di accelerazione
(perdite del motore!).
Nel calcolo vanno considerati anche il carico statico e le coppie d'attrito.
Costante elettrica di tempo Tel
Quoziente dell'induttanza del campo rotante e della resistenza dell'avvolgimento. Tel =
LD/RStr
Velocità massima nmax
La velocità meccanica massima di funzionamento nmax è il valore minimo del numero di giri
massimo ammesso a livello meccanico e del numero di giri massimo ammesso sul
convertitore.
Coppia massima Mmax
Coppia che viene generata con la massima corrente ammissibile. Per processi altamente
dinamici la coppia massima è disponibile per un tempo brevissimo.
La coppia massima viene limitata con i parametri di regolazione.
Coppia massima (limitata dal convertitore) Mmax Inv
Coppia massima che può essere fornita (brevemente) durante il funzionamento al modulo
motore suggerito.
Corrente massima Imax
Questo limite di corrente è determinato dal circuito magnetico. Un superamento anche per
breve tempo, porta a una smagnetizzazione irreversibile del materiale magnetico.
Indicazione del valore effettivo di una corrente sinusoidale.
Corrente massima del convertitore Imax Inv
Corrente di uscita effettiva del convertitore (per ramo) che viene fornita brevemente dal
modulo motore suggerito.
Motori sincroni 1FK7, generazione 2
260
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Appendice
A.1 Definizione dei concetti
Velocità massima consentita (a livello meccanico) nmax mecc
La velocità di funzionamento massima consentita a livello meccanico è nmax mecc. Essa deriva
dalle forze centrifughe e di attrito del cuscinetto.
Velocità massima consentita sul convertitore nmax Inv
La velocità di funzionamento massima consentita in caso di funzionamento su un
convertitore è nmax Inv (p. es. limitata da resistenza alla tensione, frequenza massima).
Costante di tempo meccanica Tmecc
La costante di tempo meccanica viene determinata dalla tangente di una funzione
esponenziale teorica.
Tmecc = 3 ∙ RStr ∙ Jmot/kT2 [s]
Jmot
=
Momento d'inerzia del servomotore [kgm2]
Rfase
=
Resistenza di una fase dell'avvolgimento statorico [Ohm]
kT
=
Costante di coppia [Nm/A]
NDE
Non Drive End = lato opposto all'azionamento del motore
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
261
Appendice
A.1 Definizione dei concetti
Punto di funzionamento ottimale
Punto di funzionamento in cui viene solitamente fornita la massima potenza continuativa del
motore a elevato rendimento (vedere figura seguente).
3XQWRGLIXQ]LRQDPHQWRRWWLPDOH
&RSSLD
0
01
9HORFLW¢
ˤ
5HQGLPHQWR
ˤ1
9HORFLW¢
3RWHQ]D
HURJDWD
3 RWW
31
9HORFLW¢
Figura A-1
Q RWW
Punto di funzionamento ottimale
Velocità ottimale nott
Velocità alla quale il motore garantisce una potenza ottimale.
Se la velocità nominale è inferiore alla velocità ottimale, viene indicata la velocità nominale.
Potenza ottimale Pott
Potenza che viene raggiunta alla velocità ottimale.
Se la velocità nominale risulta quale velocità ottimale (vedere velocità ottimale), la potenza
ottimale corrisponde alla potenza nominale.
Numero di poli 2p
Numero dei poli magnetici nord e sud sul rotore. p è il numero di coppie polari.
Costante di tensione kE (valore con temperatura del rotore di 20 °C)
Valore effettivo della tensione indotta del motore con un numero di giri pari a 1000 1/min e
una temperatura del rotore di 20 °C.
Motori sincroni 1FK7, generazione 2
262
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Appendice
A.1 Definizione dei concetti
Coppia da fermo M0
Coppia limite termica con il motore fermo corrispondente all'utilizzo a 100 K o 60 K. Questa
coppia può essere fornita, senza limitazione di tempo, con n = 0 1/min. M0 è sempre
maggiore della coppia nominale MN.
Corrente di stallo I0
Corrente di ramo del motore per generare la corrispondente coppia da fermo (M0 = kT • I0).
Indicazione del valore effettivo di una corrente sinusoidale.
Costante di tempo termica Tterm
Descrive l'aumento di temperatura della struttura del motore con un innalzamento repentino
del carico alla coppia nominale S1. Dopo Tth il motore ha raggiunto il 63% della sua
temperatura di esercizio.
Momento di inerzia Jmot
Momento di inerzia delle masse delle parti rotanti del motore. Jmot = senza freno, Jfr.mot = con
freno.
Resistenza torsionale dell'albero ct mot
La resistenza torsionale dell'albero è specificata dal centro del pacchetto di lamierini fino al
centro dell'estremità d'albero. ct mot = senza freno, ct fr.mot = con freno.
Resistenza dell'avvolgimento Rfase con temperatura avvolgimento di 20 °C
Viene indicata la resistenza di ramo di una fase con una temperatura avvolgimento di 20 °C.
L'avvolgimento è collegato a stella.
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
263
Appendice
A.2 Dichiarazione di conformità
A.2
Dichiarazione di conformità
Motori sincroni 1FK7, generazione 2
264
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Indice analitico
A
Avvertenze ESD, 7
C
CAD CREATOR, 196
Caratteristiche tecniche, 18
Coassialità, 55
Compatibilità ambientale, 8
Comportamento alle vibrazioni, 57
Concentricità, 55
Condizioni ambientali, 253
D
Dati tecnici
1FK7011-5AK21, 180
1FK7011-5AK71, 68
1FK7015-5AK21, 182
1FK7015-5AK71, 70
1FK7022-5AK21, 184
1FK7022-5AK71, 72
1FK7032-2AF21, 186
1FK7032-2AK71, 74
1FK7033-4CF21, 192
1FK7033-4CK71, 140
1FK7034-2AF21, 188
1FK7034-2AK71, 76
1FK7040-2AK71, 78
1FK7042-2AC71, 80
1FK7042-2AF21, 190
1FK7042-2AF71, 82
1FK7042-2AK71, 84
1FK7042-3BK71, 168
1FK7043-4CF21, 194
1FK7043-4CH71, 142
1FK7043-4CK71, 144
1FK7044-4CF71, 146
1FK7044-4CH71, 148
1FK7060-2AC71, 86
1FK7060-2AF71, 88
1FK7060-2AH71, 90
1FK7060-3BF71, 170
1FK7061-4CF71, 150
1FK7061-4CH71, 152
1FK7062-2AC71, 92
1FK7062-2AF71, 94
1FK7062-2AH71, 96
1FK7062-3BF71, 172
1FK7063-2AC71, 98
1FK7063-2AF71, 100
1FK7063-2AH71, 102
1FK7064-4CC71, 154
1FK7064-4CF71, 156
1FK7064-4CH71, 158
1FK7080-2AF71, 104
1FK7080-2AH71, 106
1FK7081-2AC71, 108
1FK7081-2AF71, 110
1FK7081-2AH71, 112
1FK7081-3BF71, 174
1FK7083-2AC71, 114
1FK7083-2AF71, 116
1FK7083-2AH71, 118
1FK7084-2AC71, 120
1FK7084-2AF71, 122
1FK7084-3BC71, 176
1FK7084-3BF71, 178
1FK7085-4CC71, 160
1FK7085-4CF71, 162
1FK7086-4CC71, 164
1FK7086-4CF71, 166
1FK7100-2AC71, 124
1FK7100-2AF71, 126
1FK7101-2AC71, 128
1FK7101-2AF71, 130
1FK7103-2AC71, 132
1FK7103-2AF71, 134
1FK7105-2AC71, 136
1FK7105-2AF71, 138
Dichiarazione di conformità, 264
E
Emissione di rumori, 57
Estremità dell'albero, 56
F
Forza di pretensionamento, 49
Frenatura mediante cortocircuito dell'indotto, 220
Motori sincroni 1FK7, generazione 2
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
265
Indice analitico
Freno di stazionamento, 216
G
Giunti di accoppiamento, 239
H
Hotline, 4
I
Influenze dovute al montaggio, 256
Interfaccia DRIVE-CLiQ, 210
L
Livello di pressione acustica, 57
P
Planarità, 55
Prodotti di terze parti, 8
Progettazione, 35
Protezione termica del motore, 207
R
Raffreddamento naturale, 47
Resistenze di frenatura, 220
Riduttore, 226
S
Segnali di pericolo e di avvertimento, 5
SinuCom, 38
SIZER for SIEMENS Drives, 35
Smaltimento, 8
Sollecitazione per forze radiali, 50
STARTER, 37
Supporto tecnico, 4
T
Targhetta dei dati tecnici, 26
Training, 3
Motori sincroni 1FK7, generazione 2
266
Manuale di progettazione, Edizione 10/2011, 6SN1197-0AD16-0CP4
Siemens AG
Industry Sector
Drive Technologies
Motion Control Systems
Postfach 3180
91050 ERLANGEN
GERMANY
Con riserva di modifiche
© Siemens AG 2011
www.siemens.com/motioncontrol