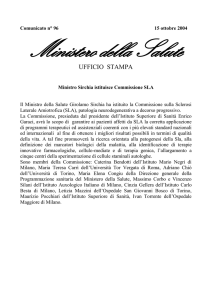
Motore in Corrente Continua
• Motore in corrente continua
• Schema elettrico
• Modello Motore+Carico
(medio)
automatica
(piccolo)
ROMA TRE
Stefano Panzieri- 1
Motore a corrente continua
automatica
ROMA TRE
Stefano Panzieri- 2
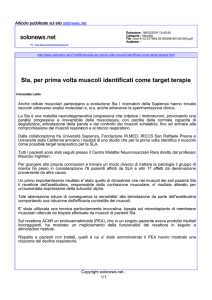
Circuito con una spira
automatica
ROMA TRE
Stefano Panzieri- 3
Coppia indotta dal passaggio di corrente
+
-
Valore della
Coppia
automatica
ROMA TRE
Stefano Panzieri- 4
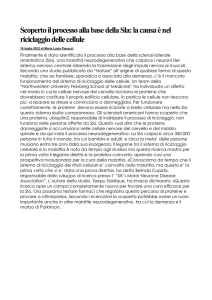
Motore con più spire
©
Rotore
© Ken Berringer,
Motorola 2000
Statore o
armatura
automatica
ROMA TRE
Stefano Panzieri- 5
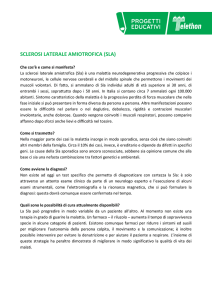
Modello analitico
Ra
Re
ve
ie
Le
Φe
statore
Φ e = K ei e
f .c.e.m. = Φ e K a ω
τ = Φ K i
e a a
m
va
rotore
ia
va
rotore
+
f.c.e.m.
flusso magnetico generato dallo statore
forza contro-elettromotrice dovuta alla rotazione
momento generato
die
ve = Reie + Le
dt
v = R i + L dia + f .c.e.m.
a a
a
a
dt
automatica
La
termini non lineari
ROMA TRE
Stefano Panzieri- 6
Eccitazione costante
die
ve = R eie + Le dt
va = R a ia + La dia + f .c.e.m.
dt
Se si impiegano magneti permanenti
o ie costante, i.e. Φ ecostante
K m = Keie Ka
= costante
le eqs. diventano lineari
Sostituendo:
dia
dia
va = R a ia + La
+ f .c.e.m. = R a ia + La
+ K mω
dt
dt
Trasformando
1
Ia (s) =
[Va (s) − K m Ω(s)]
R a + sLa
automatica
ROMA TRE
τm (s) = K m Ia (s)
Stefano Panzieri- 7
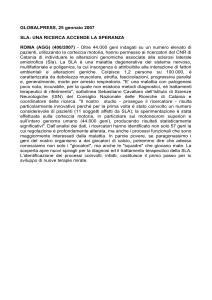
Schema a blocchi Motore + Carico
Equazione di un carico con inerzia J ed attrito D :
Motore:
J ω (t ) = − Dω (t ) + τ m
1
I a (s) =
[Va ( s ) − K m Ω( s )]
Ra + sLa
Trasformando con Laplace e ricavando la velocità Ω ( s ):
1
Ω( s ) =
τm
Js + D
τ m = Km Ia
Lo schema a blocchi che ne risulta è il seguente:
Coppia di disturbo
z
Va
1
+
Ra+sLa
f.c.e.m.
ia
Km
+
τm
+
Js+D
1
θ
s
Km
Carico
Motore
automatica
ω
1
ROMA TRE
Stefano Panzieri- 8
Schema a Blocchi
Coppia di disturbo
Schema senza carico
z
Va
1
+
ia
Ra+sLa
f.c.e.m.
Km
+
τm
+
Jm*s+Dm
Km
Motore
ω
1
Carico interno al motore*
*) inerzia rotore, attriti spazzole
Coppia di
Schema con carico senza riduttore
disturbo
Va
1
+
Ra+sLa
f.c.e.m.
Motore
automatica
ia
Km
JI*s+DI
z
+
τm
+
Km
ROMA TRE
+
1
ω
Jm*s+Dm
Carico interno ed esterno
Stefano Panzieri- 9
Semplificazione
-
ω
1
JI*s+DI
(Jm+JI)*s+(Dm+DI)
Equivalenti
ω
1
Jm*s+Dm
ω
1
Jt=Jm+JI
Dt=Dm+DI
Jt*s+Dt
Coppia di
disturbo
Va
1
+
Ra+sLa
f.c.e.m.
Motore
automatica
ia
Km
z
+
τm
+
Km
1
ω
Jt*s+Dt
Carico interno ed esterno
ROMA TRE
Stefano Panzieri- 10
automatica
ROMA TRE
Stefano Panzieri- 11
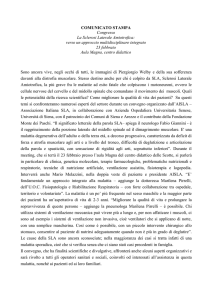
Il Riduttore (ingranaggi)
In generale i motori in c.c. sono troppo veloci e
danno una coppia ridotta rispetto alle esigenze dei carichi.
Si usa una riduzione meccanica (cambio)
b1
bN
x1
xN
analogo della leva
Rapporto tra # denti 1 : N
rapporto tra le velocità N : 1
Leva:
Il lavoro è costante quindi (considerando che gli spostamenti hanno verso opposto):
F1*x1=FN*xN
=> F1=FN(xN/x1)=FN(bN/b1)
Anche la potenza è costante quindi derivando la precedente:
F1*v1=FN*vN
automatica
=> F1=FN(vN/v1)=FN(bN/b1)
ROMA TRE
Stefano Panzieri- 12
Il Riduttore
Riduttore:
Il lavoro è costante quindi :
C1θ1= C2θ2
Anche la potenza è costante quindi derivando la precedente:
C1ω1 = C N ωN
L’albero di uscita è più lento
1
1
ωN = ω1; C1ω1 = C N ω1
N
N
automatica
ROMA TRE
ma fornisce coppia maggiore
(es.: cambio della bicicletta)
Stefano Panzieri- 13
Schema a blocchi
Coppia di
Schema con carico e riduttore
disturbo
Va
ia
1
+
Ra+sLa
f.c.e.m.
=
Km
1
+
+
Jm*s+Dm
1
Jm*s+Dm
Jm*s+Dm
JI*s+DI
Jm*s + Dm
N2
1
Dm)N2
+ JI*s + DI
ωm
1/N
ωv
Carico interno ed esterno
1
1
(Jm*s +
-
Km
Motore
1+
τm
JI*s+DI
1/N
z
+
=
(Jm*s +
Dm)N2
+ JI*s + DI
=
(Jm*s + Dm) N2
=
1
(Jm + JI/N2)*s + Dm + DI/N2
N2
automatica
ROMA TRE
Stefano Panzieri- 14
Semplificazione
JI*s+DI
1/N
+
ωv
1/N
1
ωm
1
Equivalenti
ωm
(Jm+JI/N2)*s+(Dm+DI/N2)
ωm
1
Jm*s+Dm
Jt*s+Dt
Jt=Jm+JI/N2
Dt=Dm+DI/N2
Se N=100,
l’effetto del carico esterno è
ridottissimo
Schema con carico e riduttore
Coppia di
disturbo
Va
1
+
Ra+sLa
f.c.e.m.
Motore
automatica
ia
Km
z
+
τm
+
Km
1
Jt*s+Dt
ωm
1/N
ωv
Carico interno ed esterno
ROMA TRE
Stefano Panzieri- 15
Controllo in corrente sull’armatura
Ia ≅ Iref
Iref
+
Amplific di
tens ione
K--> inf
-
riduttore
1:N
Va
Ωv
Motore in C.C.
Ωm
volano
Amplif. di misura
0.1 ohm
+
Ka=10
-
sensore di corrente
loop di corrente
automatica
ROMA TRE
Stefano Panzieri- 16
Schema a Blocchi
Ia
+
-
Amplific di
tensione
K--> inf
Ωv
riduttore
1:N
Motore in C.C.
Va
Ωm
volano
Amplif. di misura
0.1 ohm
+
Ka=10
-
carico+riduttore
alimentazione
0.1*10
+
-
+
K
Va -
1
--------------Ra + s*La
Ia
Cm
Km
Ωv
1
------------Jt*s + Dt
1/N
Ωm
Km
motore
automatica
ROMA TRE
Stefano Panzieri- 17
Semplificazione
0.1*10
Ia, ref +
K
Ia
1
--------------Ra + s*La
Cm
1
------------Jt*s + Dt
Km
1/N
Ωm
Km/K
K
-----------------Ra + s*La +K
KÆinf
Ia, ref
Km/K
1
1
Ia
Km
Cm
KÆinf
1
------------Jt*s + Dt
Ωv
0
Ωm
1/N
Ωv
Il controllo in corrente equivale a controllare la coppia
automatica
ROMA TRE
Stefano Panzieri- 18
Esercizio (Esame 7-11-2000)
automatica
ROMA TRE
Stefano Panzieri- 19
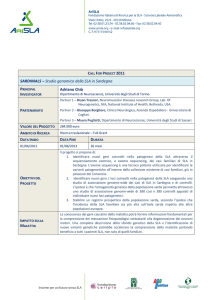
Soluzione Esercizio
Mg
s
Jt=Jm+Mr2/N2
Dt=Dm+DI/N2
r
N
Vin
1
+
ia
Ra+sLa
-
Km
ωm
+
τm
+
1
Jt*s+Dt
θm
1
s
θa
1/N
.
h
r
h
s
Km
Funzione di Trasferimento tra Vin e θm:
1
+
-
Ra+sLa
ia
Km
τm
1
Jt*s+Dt
ωm
1
s
θm
Km
automatica
ROMA TRE
Stefano Panzieri- 20
Soluzione Esercizio
ωm
=
Vin
=
1
1
Km
Ra+sLa Jt*s+Dt
1
1
2
Km
1+
Ra+sLa Jt*s+Dt
=
1
1
Km
Ra+sLa Jt*s+Dt
(Ra+sLa) (Jt*s+Dt) +
Km2
=
(Ra+sLa) (Jt*s+Dt)
Inoltre essendo θm = ωm *1/s :
Km
1
Km
θm
=
Vin
s
(Ra+sLa) (Jt*s+Dt) + Km2
(Ra+sLa) (Jt*s+Dt) + Km2
Funzione di Trasferimento tra θm e h:
r
h
=
θm
N
automatica
ROMA TRE
Stefano Panzieri- 21
Soluzione Esercizio
Funzione di Trasferimento tra forza peso (Mg/s) e dh/dt :
P(s) =
Mg
s
r/N
+
Jt*s+Dt
-
Km
.
h
P(s)
=
1
Jt*s+Dt
=
1+
1
1
Ra+sLa Jt*s+Dt
Km2
(Ra+sLa)
(Ra+sLa) (Jt*s+Dt) + Km2
automatica
ωm
1
1
Ra+sLa
r2
=
N2
.
1/N
r
h
Km
1
Jt*s+Dt
(Ra+sLa) (Jt*s+Dt) + Km2
r2
=
2
N
(Ra+sLa) (Jt*s+Dt)
r2
N2
ROMA TRE
Stefano Panzieri- 22
Soluzione Esercizio
.
h =
(Ra+sLa)
(Ra+sLa) (Jt*s+Dt) + Km2
dh
(∞) = lim s
s→0
dt
=
r2 Mg
N2 s
Ra
Ra*Dt + Km2
automatica
(Ra+sLa)
(Ra+sLa) (Jt*s+Dt) + Km2
r2 Mg
=
N2 s
r2 Mg
N2
ROMA TRE
Stefano Panzieri- 23