POLITECNICO DI MILANO
Facoltà di Ingegneria dell'Informazione
Corso di Laurea Magistrale in
Ingegneria Elettronica
Progettazione di una linea di ritardo per
emulatore digitale di segnali casuali
Relatore: Prof. Angelo GERACI
Correlatore: Prof. Andrea ABBA
Tesi di Laurea Magistrale di:
Ursula ZANICHELLI
Matr. 739843
Anno Accademico 2013 – 2014
Index
Capitolo 1 : Fondamenti di rivelazione di segnali ....................................................14
1.1
L’atomo e la radioattività ............................................................................14
1.2
Interazione dei fotoni con la materia ...........................................................15
1.2.1 Effetto fotoelettrico ...................................................................................15
1.2.2 Effetto Compton .......................................................................................16
1.2.3 Produzione di coppie ................................................................................18
1.3
Immagini radiografiche ...............................................................................20
1.4
La gamma camera ........................................................................................23
1.4.1 I parametri di una gamma camera ............................................................24
1.5
La tomografia ad emissione .........................................................................28
1.5.1
SPECT ..................................................................................................28
1.5.2
PET .......................................................................................................29
1.6
Significato di emulazione e relativi vantaggi ..............................................31
Capitolo 2 : Flusso di sintesi dei segnali emulati ......................................................32
2.1
Conversione digitale-analogica dei segnali .................................................33
2.1.1 Ricostruzione ideale..................................................................................34
2.1.2 Ricostruzione reale ...................................................................................34
2.1.3 Architettura di DAC a generatori di corrente ...........................................36
2.1.4 Errori statici del DAC ...............................................................................42
2.1.5 Errori dinamici del DAC ..........................................................................44
2.1.6 Jitter di campionamento ............................................................................46
2.2
Ampiezza degli impulsi correlata con lo spettro di emissione ....................50
2.3
Generazione dei tempi statistici di arrivo degli impulsi ..............................58
3
2.4
Forma dell’impulso digitale.........................................................................61
2.5
Emulazione della baseline ...........................................................................65
2.6
Emulazione del rumore ................................................................................67
2.7
Shaping dell’uscita ......................................................................................70
Capitolo 3 : Emulatore di detector di radiazioni a singolo canale ............................73
3.1
Principio di emulazione ...............................................................................74
3.2
Processo di emulazione ...............................................................................76
3.3
Principali caratteristiche del DDE (Digital Detector Emulator) .................79
Capitolo 4 : Generazione dei ritardi ..........................................................................82
4.1
Specifiche generiche del sistema .................................................................85
4.2
Sviluppo concettuale....................................................................................88
4.3
Implementazione hardware..........................................................................90
4.4
Esempi di applicazioni.................................................................................96
Capitolo 5 : Stabilizzazione in temperatura e validazione sperimentale ..................98
5.1
Hardware e layout ........................................................................................98
5.2
Dati sperimentali........................................................................................102
5.2.1
Risoluzione e linearità ........................................................................102
5.2.2
Dipendenza del ritardo dalla temperatura ...........................................105
5.3
Conclusioni e sviluppi futuri .....................................................................106
4
Elenco delle figure
Figura 1.1: Schema dell’effetto fotoelettrico. ...........................................................16
Figura 1.2: Schema dell’effetto Compton. ................................................................17
Figura 1.3: Interazioni dominanti dei fotoni con la materia. ...................................18
Figura 1.4: Flusso di acquisizione immagini radiografiche. ...................................20
Figura 1.5: Formazione dell’immagine radiologica primaria. ................................21
Figura 1.6: Rappresentazione schematica di una gamma camera...........................23
Figura 1.7: Illustrazione della rivelazione in coincidenza in un tomografo PET. ...30
Figura 2.1: Forma d’onda all’uscita dello stadio S&H del DAC ............................33
Figura 2.2: Confronto tra il filtro di ricostruzione ideale e la risposta che si ottiene
da uno zero-order holder (S&H)...............................................................................35
Figura 2.3: (a) Controllo a pesi binari. (b) Controllo a pesi unitari .......................37
Figura 2.4: (a) Semplice modello di una cella di un DAC current steering. (b)
Circuito equivalente totale ........................................................................................38
Figura 2.5: FFT di una sinusoide pure campionata a 21 bit. (a) Segnale generatoda
un DAC single-ended. (b) Segnale generato da un DAC differenziale. Si può
osservare che la seconda armonica è trascurabile. ..................................................39
Figura 2.6: Schema concettuale di un DAC current steering a segmentazione .......42
Figura 2.7:Non linearità, errori di offset e guadagno di un DAC. ..........................43
Figura 2.8: Definizione del tempo di settling di un DAC. ........................................45
Figura 2.9: Errori causati dal jitter sugli istanti di campionamento. ......................47
Figura 2.10: Jitter sul clock a diversi SNR e frequenze di ingresso. ........................49
Figura 2.11: Spettro ottenuto convolvendo lo spettro della sorgente con la funzione
di trasferimento del sensore ......................................................................................50
Figura 2.12: Spettro ottenuto per simulazione Monte Carlo di una sorgente di
emissione di 60Co rilevata da sensore in NaI. .........................................................51
Figura 2.13: Conversione di un’immagine in uno spettro. ......................................52
Figura 2.14: Modulazione di uno spettro bianco. ....................................................53
Figura 2.15: Generazione delle ampiezze casuali partendo da uno spettro di
energia. ......................................................................................................................54
Figura 2.16: Schema di un LFSR a 64 bit. ...............................................................55
Figura 2.17:Aucotorrelazione di un vettore contenente 1.5 milioni di numeri casuali
generati con (a) l’implementazione del LFSR e con (b) la funzione “rand” di
MATLAB. ...................................................................................................................56
Figura 2.18: (a) Spettro di riferimento e (b) spettro generato e ricostruito con un
istogramma. La differenza in energia assoluta è dovuta alla mancanza di una
scalatura. Si noti, tuttavia, come i rapporti di forma e distanza siano rispettati. ....57
Figura 2.19: Schema a blocchi del circuito di generazione dei tempi. ....................59
Figura 2.20: Schema a blocchi del circuito di emulazione della forma d’onda degli
impulsi. ......................................................................................................................62
Figura 2.21: Schema a blocchi del filtro RC-RC emulato. .......................................64
Figura 2.22: Schema a blocchi del circuito di emulazione della linea di base. .......65
Figura 2.23: Interpolazione lineare (rosso) e cubica spline (blu). ..........................66
Figura 2.24: Sorgenti di rumore in uno stadio front-end per rivelazione nucleare. 67
Figura 2.25: Schema a blocchi del circuito generatore di rumore digitale .............68
Figura 2.26: Risposta in frequenza dei tre filtri IIR. ................................................69
Figura 2.27: (a) Schema di principio del formatore CR-RC. (b) Tipiche risposte
all’impulso e allo scalino. .........................................................................................71
Figura 3.1: Detector di radiazione a 2 canali Progettato dalla Nuclear Instruments.
...................................................................................................................................73
Figura 3.2: Presentazione dell’emulatore di radiazioni. .........................................75
Figura 3.3: Schema a blocchi del processo di generazione degli eventi..................76
Figura 3.4: Due differenti forme d’onda sullo stesso canale d’uscita. ....................79
Figura 4.1: Rappresentazione a blocchi della generazione del ritardo. ..................84
Figura 4.2: Schema a blocchi. ..................................................................................85
Figura 4.3: Regolazione dello sfasamento temporale tra i segnali prodotti dai due
canali. Risoluzione 11.6 ps........................................................................................86
6
Figura 4.4: Generazione di eventi correlati. CH1 in rosso, CH2 in blu. .................86
Figura 4.5: CHA e CHB generano uno sfondo non correlato sui due canali
d’uscita. Solo alcuni impulsi sono generati con correlazione. .................................87
Figura 4.6: Architettura delle linee di clock. ............................................................88
Figura 4.7: Casistiche di generazione dei segnali di start a seconda del clock. .....89
Figura 4.8: Setup di prova. .......................................................................................91
Figura 4.9: Layout. ...................................................................................................92
Figura 4.10: Delay line programmabile. ..................................................................93
Figura 4.11: Schematico sezione relativa ad uno dei due DAC. ..............................94
Figura 4.12: Emulazione dell’emissione del sodio. ..................................................96
Figura 5.1: Schema a blocchi del PSoC 3 della famiglia CY8C38. .........................99
Figura 5.2: Schema a blocchi del ponte a H NCV7729 della ON Semiconductor .100
Figura 5.3: Schematico stabilizzazione in temperatura .........................................101
Figura 5.4: Test sulla risoluzione e spettro reale confrontato con quello emulato.
.................................................................................................................................102
Figura 5.5:Ritardo misurato sperimentalmente rispetto a quello teorico. .............103
Figura 5.6: Risoluzione e linearità in relazione al ritardo scelto in ps. ................103
Figura 5.7: Misura della dispersione del ritardo. ..................................................104
7
8
Sommario
L’importante evoluzione dei processori digitali per le misure di radiazioni ha
sottolineato l’estrema convenienza che risiede nello sviluppo di tecniche di
emulazione dei sistemi di rilevazione ed acquisizione. Il processo di debugging dei
sistemi come processori di impulsi digitali, discriminatori di impulsi, convertitori
Time-to-Digital, etc, richiede uno sforzo sempre più consistente nell’elaborazione di
algoritmi che stanno diventando sempre più complessi. La possibilità di generare
dei vettori di test che siano il più possibile simili ai dati prodotti dall’esperimento
vero e proprio, sia per quanto concerne la simulazione software che a livello
hardware, può ridurre notevolmente il tempo di ricerca e sviluppo.
Tutto questo può essere riassunto nella necessità di generare un segnale elettrico
con caratteristiche completamente controllabili, che sia in linea con l’output reale di
un setup di rilevazione delle radiazioni. Sebbene l’utilizzo di sorgente e rilevatore
sia sempre la maniera migliore per generare dati affidabili, comporta considerevoli
svantaggi, specialmente durante gli studi preliminari di fattibilità. L’utilizzo della
sorgente comporta necessariamente un rischio per la salute degli sperimentatori e, in
aggiunta, richiede un laboratorio attrezzato in conformità con le norme per l’utilizzo
di sostanze radioattive.
Oltretutto, lo spettro di emissione dipende dalla natura della sorgente, ad esempio la
polarizzazione di un tubo a raggi X o il processo di decadimento. La distribuzione
statistica degli eventi è Poissoniana e solitamente l’utente può solo controllarne la
frequenza e non ha alcun controllo sulla statistica. Lo spettro di rumore, le
interferenze e la forma dell’impulso sono caratteristiche sulle quali lo
sperimentatore può difficilmente agire. Tra l’altro il processo naturale di emissione
non è ripetibile e, quindi, non è possibile valutare il comportamento di differenti
implementazioni del processo su un identico insieme di dati.
9
Scopo di questo lavoro di tesi è contribuire alla realizzazione di uno strumento
emulatore multicanale di radiazioni nucleari con il fine di evitare di dover avere
fisicamente a disposizioni le sorgenti radioattive durante la fase di sviluppo dei
sistemi di elaborazione. Ciò comporta molteplici vantaggi in termini di economia di
progetto, sicurezza degli operatori e flessibilità del processo di design.
Le applicazioni possono essere le più svariate, dall’imaging biomedico alla fisica
all’astronomia.
Comincerò la mia trattazione con un’introduzione sull’imaging biomedico per
passare ai principi dell’emulazione e concludere soffermandomi sul mio lavoro in
particolare, che si incentra sulla progettazione delle linee di ritardo che permettono
operazioni di sfasamento tra i diversi percorsi dei segnali emulati sulle uscite.
10
Abstract
The massive evolution of digital processors for radiation measurements has
highlighted the extreme convenience to develop techniques for emulating the
detection and acquisition systems. The process of debugging of systems as digital
pulse processors, pulse discriminators, Time-to-Digital/Amplitude converters, etc,
requires an ever-increasing effort of processing algorithms that are becoming more
and more complex.
The possibility to generate test vectors that are the as similar as possible to the
actual data produced by the experiment, both in the software simulation and at the
hardware level can extremely reduce the R&D projects time.
All of this can be summarized in the need to generate an electrical signal with
completely controlled characteristics that is compliant to the real output of a
radiation detection setup. Although the use of a source and a detector is always the
best way to generate a reliable data set, it involves considerable disadvantages,
especially during preliminary feasibility studies. The use of the source inherently
involves a risk for the health of the experimenters, and in addition requires labs
equipped in accordance with the regulations in term of use of radioactive
substances.
Moreover, the emission spectrum depends on the nature of the source, e.g. the
polarization of an X-ray tube or the process of decay. The statistical distribution of
the events is Poissonian and usually the user can only control the rate, and has no
control on the statists. The spectrum of noise, interferences and the pulse shape are
issues on which the experimenter can hardly affect. Furthermore, the natural
emission process is not repeatable and therefore it is not possible to evaluate the
behavior of different implementations of the processing system on a set of equal
data.
11
The scope of this thesis work is to contribute to the realization of a multichannel
nuclear radiation emulator, aimed to avoid the necessity to physically use
radioactive sources during the elaboration systems development phase. This implies
many advantages in terms of economy, operators’ security and design flexibility.
There are several possible applications, from biomedical imaging to physics and
astronomy.
I will begin my dissertation with an introduction to biomedical imaging, then
switching to emulation principles and concluding with a detailed explanation of my
work, which is mostly centered around the delay lines design, allowing time shift
operations between different signal paths emulated on the outputs.
12
Capitolo 1 : Fondamenti di rivelazione di
segnali
1.1
L’atomo e la radioattività
L’atomo è la più piccola parte della materia che conserva le proprietà chimiche di
un elemento. Il numero di protoni (numero atomico) determina il tipo di elemento
mentre il numero di neutroni è variabile all’interno di uno stesso elemento. Atomi
con lo stesso numero di protoni ma diverso numero di neutroni sono detti isotopi.
Ogni isotopo è caratterizzato da un diverso livello di energia: maggiore è l’energia
maggiore è l’instabilità dell’elemento che tende a decadere rilasciandone una parte
sottoforma di radiazione e/o particelle. Normalmente il decadimento di un isotopo è
molto rapido mentre altri decadono in un tempo più lungo, misurabile, e sono perciò
detti isomeri. Il tempo di emivita di un isotopo è definito come il tempo che deve
trascorrere prima che metà dei nuclei di un certo numero di questi isotopi decada
emettendo radiazioni. Dopo 10 tempi di emivita si considera virtualmente decaduta
tutta la dose. L’attività di un isotopo è definita come il numero di
disintegrazioni/secondo di una certa quantità di radionuclidi e si misura in Bequerel.
Le radiazioni elettromagnetiche si differenziano per lunghezza d’onda, che è
inversamente proporzionale all’energia trasportata dalle radiazioni. Le radiazioni X
si originano dal mantello elettronico, le radiazioni γ dal riarrangiamento del nucleo.
Una radiazione, specie se ad elevata energia, interagisce con la materia cedendo
parte della sua energia stessa; se questa è sufficientemente elevata da strappare un
elettrone si parla di “radiazione ionizzante”. Esistono radiazioni direttamente
ionizzanti (α e β) e indirettamente ionizzanti (γ). Queste ultime sono virtualmente
prive di massa.
1.2
Interazione dei fotoni con la materia
In un dispositivo rivelatore a stato solito, il parziale o completo trasferimento
d’energia tra fotoni gamma e atomi della struttura del materiale stesso avviene
tramite più possibili interazioni: assorbimento fotoelettrico, scattering Compton e
produzione di coppie.
1.2.1 Effetto fotoelettrico
Questo effetto d’interazione coinvolge tutto l’atomo: in esso un fotone “colpisce”
uno degli elettroni orbitali di un atomo del mezzo assorbente, cedendogli tutta la sua
energia (figura 1.1). A seguito dell’interazione il fotone scompare e l’atomo risulta
ionizzato; l’elettrone colpito viene estratto dall’atomo e risulta eccitato da
un’energia cinetica data da
𝐸𝑐 = ℎ𝜈 − 𝐸𝑙𝑒𝑔
dove Eleg è l’energia di legame che unisce l’elettrone all’atomo, h è la costante di
Planck e 𝜈 è la frequenza della radiazione considerata. Affinché l’effetto
fotoelettrico possa avere luogo deve quindi essere
ℎ𝜈 > 𝐸𝑙𝑒𝑔
e quindi l’effetto fotoelettrico è un effetto a soglia, che può essere caratterizzato
dalla frequenza di soglia che deve essere posseduta dai fotoni
𝜈0 = 𝐸𝑙𝑒𝑔 /ℎ
Se l’elettrone rimosso appartiene ad uno degli strati interni il suo posto verrà preso
da un elettrone più esterno, con conseguente emissione dell’energia corrispondente
al “salto” sotto forma di un fotone X di fluorescenza. L’interazione per effetto
fotoelettrico ha una probabilità rapidamente decrescente in funzione dell’energia e
risulta molto probabile per materiale assorbente avente un numero atomico Z
15
elevato. Se N è la densità atomica, ovvero il numero di atomi per cm3 del materiale
assorbente, per ℎ𝜈 < 0.2 𝑀𝑒𝑉 si può scrivere [1]
𝑁 𝑍5
𝜏=
(ℎ𝜈)3.5
L’effetto fotoelettrico diventa quindi trascurabile per fotoni di energia superiore a
poche centinaia di keV, mentre risulta l’effetto di interazione predominante al di
sotto dei 100-150 keV.
Figura 1.1: Schema dell’effetto fotoelettrico.
1.2.2 Effetto Compton
Nell’effetto Compton il fotone incidente di energia iniziale hν non scompare dopo
l’interazione, ma oltre all’elettrone estratto dall’atomo si ottiene un fotone diffuso di
energia hν’ inferiore a quella iniziale, che viaggia su di una traiettoria diversa da
quella iniziale (figura 1.2). Nei confronti dell’energia del fotone incidente tanto
l’energia cinetica iniziale del fotone diffuso che quella di legame sono
sostanzialmente trascurabili.
16
Figura 1.2: Schema dell’effetto Compton.
L’angolo di deflessione risulta legato all’energia ceduta nell’interazione; sussiste
infatti la seguente reazione fra l’energia del fotone diffuso Es, l’energia del fotone
incidente iniziale Ei e l’angolo di deflessione θ:
𝐸𝑠 =
𝐸𝑖
[1 + (𝐸𝑖 /𝑚𝑒 𝑐 2 )(1 − 𝑐𝑜𝑠𝜃)]
dove 𝑚𝑒 𝑐 2 è l’energia corrispondente alla massa di riposo dell’elettrone (511 keV).
Si ha cioè che la deflessione è tanto maggiore quanto più grande è l’energia ceduta
nell’interazione fino ad una deflessione massima di 180°, ovvero alla
retrodiffusione del fotone incidente; in tale situazione l’equazione:
𝐸𝑠 = 𝐸𝑖 [1 −
1
]
2 𝐸𝑖
1+
𝑚𝑒 𝑐 2
Fornisce il valore di energia corrispondente alla cosiddetta spalla Compton dello
spettro dei fotoni gamma. Per ℎ𝜈 > 0.5 𝑀𝑒𝑉, [1] la probabilità σ d’interazione
Compton è direttamente proporzionale al numero atomico del materiale assorbente
ed inversamente proporzionale all’energia dei fotoni incidenti:
17
𝜎∝
𝑁∙𝑍
ℎ𝜈
L’interazione per effetto Compton risulta la più probabile nell’intervallo di energie
dei fotoni fra le poche centinaia di keV e i pochi MeV.
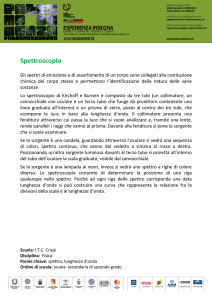
1.2.3 Produzione di coppie
In questo processo un fotone cede tutta la sua energia materializzandosi in un
elettrone ed un positrone, dotati di energia cinetica. La produzione di coppie è un
effetto a soglia: poiché l’energia a riposo dell’elettrone e del positrone è uguale a
511 keV, occorre che il fotone iniziale abbia una energia E>1.022 MeV. Quanto più
grande è l’energia, tanto maggiore è la probabilità dell’effetto coppie; ad alte
energie tale effetto diventa predominante rispetto agli effetti fotoelettrico e
Compton. La probabilità della produzione di coppie [1] è data in modo
approssimativo da
𝜋 ≅ 𝑁 ∙ 𝑍02 ∙ (ℎ𝜈 − 2𝑚𝑐 2 ) per 𝐸 ≈ 1.022 𝑀𝑒𝑉
𝜋 ≅ 𝑁 ∙ 𝑍02 ∙ 𝑙𝑛(ℎ𝜈) per 𝐸 ≫ 1.022 𝑀𝑒𝑉
E’ da notare come l’energia iniziale possa ripresentarsi sotto forma di fotoni,
attraverso il processo inverso di annichilazione.
Figura 1.3: Interazioni dominanti dei fotoni con la materia.
18
In figura 1.3 è rappresentata la probabilità d’occorrenza dei tre processi
descritti sopra per diversi materiali assorbenti ed energie dei fotoni gamma.
Ad alte energie, la produzione di coppie è l’effetto dominante, mentre per
basse energie l’effetto fotoelettrico è quello dominante.
E’ necessario porre delle ipotesi per ottenere una semplice legge di
assorbimento dei fotoni nel materiale; il fascio deve essere monoenergetico,
sottile e collimato per imporre che un fotone, una volta che ha interagito per
effetto Compton e sia quindi stato diffuso, possa essere considerato rimosso
dal fascio. Inoltre va preso in considerazione un singolo spessore di materiale
assorbente, sufficientemente sottile da non alterare sostanzialmente il fascio.
L’equazione ottenuta è:
−𝑑𝐼 = 𝐼 ∙ 𝜇 ∙ 𝑑𝑥
Dove dI rappresenta la variazione dell’intensità I del fascio di fotoni entro lo
spessore infinitesimo dx di assorbitore. Il coefficiente di proporzionalità µ si
dice coefficiente di attenuazione lineare delle radiazioni. Il µ è una
caratteristica del materiale assorbente, dipendente dal numero atomico medio Z e
dalla densità ρ del materiale, ed è funzione dell’energia dei fotoni incidenti. Il
coefficiente di attenuazione lineare rappresenta la probabilità complessiva di
interazione per unità di percorso di un fotone di energia assegnata entro un fissato
materiale assorbente; il µ può essere espresso come somma delle sue
componenti, relative a ciascuno degli effetti di interazione.
𝜇 =𝜏+𝜎+𝜋
19
1.3
Immagini radiografiche
La radiologia diagnostica sfrutta le proprietà di assorbimento dei raggi X da parte
dei tessuti biologici per ottenere informazioni di tipo morfologico –funzionale di
strutture anatomiche. Poiché l’occhio umano non è sensibile all’intervallo X dello
spettro elettromagnetico, tali informazioni debbono essere rappresentate sotto forma
di immagine visibile, usando opportuni sistemi di conversione dell’informazione
relativa all’immagine.
Figura 1.4: Flusso di acquisizione immagini radiografiche.
In figura 1.4 è rappresentato uno schema di come viene trasformata l’informazione
contenuta nell’oggetto di studio in una forma riconoscibile all’occhio, indicata come
immagine. Strutture differenti dell’oggetto sono distinguibili in base alla forma, alle
dimensioni e alla densità del tessuto che le costituisce (una volta riprodotte come
immagini).
Quando un fascio di raggi X uniforme (di densità costante) interagisce con i tessuti
di un paziente [2], viene attenuato in maniera diversa, a seconda delle caratteristiche
di densità e spessore del tessuto interessati; ad esempio, l’osso è molto più
assorbente del tessuto molle e quindi un’immagine che contenga entrambi i tipi di
tessuto risulta molto contrastata, il che significa che i due tessuti appaiono
nettamente distinguibili. Pertanto, il fascio trasmesso dal paziente risulta modulato
20
in base, appunto, allo spessore del tessuto attraversato e alle sue caratteristiche; la
modulazione rappresenta, di conseguenza, l’informazione contenuta nell’elemento
anatomico che si sta analizzando. Il fascio trasmesso è anche noto come immagine
radiologica primaria (figura 1.5) e contiene sia l’informazione “utile”, cioè quella
dovuta all’interazione fotoelettrica del fascio X con i tessuti, sia la radiazione di
scattering, cioè quella dovuta all’interazione dei raggi X per effetto Compton e
Rayleigh. Le radiazioni elettromagnetiche che vengono rilevate direttamente dal
loro punto di origine sono chiamate fotoni, o radiazioni ‘primarie’. Altre radiazioni
che raggiungono il sistema di rilevazione sono le radiazioni ‘secondarie o
scatterate’, dovute essenzialmente all’effetto Compton, e le radiazioni di ‘fondo’,
provenienti dalla radioattività ambientale, cosmica o da eventuali contaminazioni.
In linea di principio solo i fotoni primari sono indicatori della concentrazione di
radioattività proveniente da una sorgente emittente. La discriminazione tra le varie
radiazioni è determinata dalla loro energia. La scelta di condizioni di buona
geometria e l’impiego della griglia anti-diffusione riducono il contributo della
radiazione di scattering (del tutto inutile ai fini dell’informazione diagnostica).
Figura 1.5: Formazione dell’immagine radiologica primaria.
21
L’immagine radiologica primaria deve essere convertita, a questo punto, in
immagine visibile, per poter essere valutata dal radiologo. La conversione può
avvenire impiegando due categorie fondamentali di dispositivi: quelli che fanno uso
di materiali scintillanti e quelli che producono immagini elettroniche.
22
1.4
La gamma camera
La gamma camera è un sistema per la produzione di immagini biomediche basato
sulla proprietà di alcuni rivelatori di radiazioni di convertire l’energia dissipata dai
fotoni X e gamma nelle loro interazioni, in impulsi elettronici di ampiezza
proporzionale. [3]
La denominazione deve essere quindi vista come un logico adattamento del termine
“foto camera”, ovvero la comune macchina fotografica, apparato che ugualmente è
in grado di produrre immagini, ma a partire da fotoni caratterizzati da un ben
differente livello energetico. A partire dalla sua introduzione da parte di Hal Anger
nel 1958, la gamma camera ha subito un processo di evoluzione cha ha portato dai
primi strumenti, di tipo interamente analogico, ai più recenti apparecchi nei quali
l’elettronica di analisi degli impulsi, di controllo del sistema di rivelazione (il
cosiddetto “front end”) e lo stesso sistema di registrazione delle immagini, sono di
tipo digitale.
La figura 1.6 mostra schematicamente il sistema di rilevazione della radioattività e
di formazione dell’immagine con la gamma camera.
Figura 1.6: Rappresentazione schematica di una gamma camera.
23
L’interazione della radiazione elettromagnetica collimata con il rilevatore genera
una scintillazione nel cristallo che rispecchia la distribuzione della sorgente
radioattiva posta di fronte al collimatore. Il collimatore rappresenta il primo
elemento della gamma camera che interagisce con la radiazione, esso assorbe la
maggior parte dei raggi gamma la cui direzione si discosta da quella di
focalizzazione. Un PMT o SDD, posto a stretto contatto con il cristallo, trasforma
l’energia luminosa prodotta dalla scintillazione in energia elettrica, mentre un
circuito di posizione consente di determinare la precisa localizzazione delle
coordinate di scintillazione, così come essa avviene nel cristallo. Il segnale elettrico
generato è poi analizzato da un circuito elettronico di discriminazione dell’energia.
Vediamo ora in dettaglio le principali componenti che costituiscono la gamma
camera.
1.4.1 I parametri di una gamma camera
I parametri fondamentali di una gamma camera possono essere classificati in due
categorie principali: quelli relativi alla modalità di misura intrinseca e quelli
riguardanti la modalità di sistema, ovvero con collimatore installato.
Di seguito viene riportata una breve descrizione dei parametri atti a descrivere la
modalità di misura intrinseca, quindi si considera la caratterizzazione del rivelatore
[3].
Risoluzione energetica intrinseca
Tale grandezza esprime la capacità del rivelatore di distinguere gli impulsi prodotti
da fotoni di differente energia; risulta quindi fondamentale per caratterizzare la
capacità di un’apparecchiatura di discriminare le radiazioni diffuse. La risoluzione
energetica è espressa in termini della FWHM % del picco a 140 keV del
Risoluzione spaziale intrinseca
24
99m
Tc.
Esprime la capacità del rivelatore di risolvere due distinte sorgenti di radiazioni. I
parametri che influenzano la risoluzione spaziale intrinseca sono il tipo di materiale
del cristallo ed il suo spessore, il numero e le dimensioni dei fotorivelatori con la
relativa efficienza quantica, le caratteristiche dell’accoppiamento tra il cristallo e i
fotorivelatori. La risoluzione spaziale è uno dei parametri più importanti quando si
parla di strumentazione nucleare poiché limita la capacità dei dottori di individuare
piccole masse tumorali e lesioni.
Linearità spaziale intrinseca
Questa grandezza rappresenta la distorsione in funzione della posizione, ovvero lo
spostamento fra la posizione reale di un oggetto e la posizione misurata
nell’immagine acquisita. La deviazione standard dei valori delle coordinate di
posizione x e dei valori delle coordinate di posizione fornisce la linearità spaziale
differenziale. Per il calcolo della linearità spaziale integrale, si deve determinare una
griglia di scarti delle singole posizioni misurate da quelle ideali, che possono essere
ricavate mediante un’interpolazione lineare lungo ciascuna immagine di sorgente
lineare. Lo scarto massimo riscontrato rappresenta appunto il valore di linearità
spaziale integrale da riportare.
Prestazioni intrinseche nei confronti della frequenza di conteggio
Dopo la rivelazione di un fotone gamma dalla sorgente, la gamma camera non è
capace di individuare un nuovo evento per un tempo fisso, chiamato tempo morto.
Il tempo morto ed il profilo di tempo del decadimento dello scintillatore
determinano il massimo rate di funzionamento della gamma camera e quindi la sua
capacità di funzionare accuratamente a rate prossimi a quello massimo.
Considerando le caratteristiche specificate in modalità di sistema, cioè con
collimatore installato, è necessario fare riferimento ai parametri riportati di seguito.
25
Risoluzione spaziale del sistema
La risoluzione di sistema è data dalla combinazione della risoluzione intrinseca del
rivelatore e della risoluzione geometrica del collimatore
𝑅𝑠 = √𝑅𝑖2 + 𝑅𝑐2
Il contributo dominante che limita la risoluzione spaziale complessiva del sistema è
da attribuire al collimatore il quale è funzione dello spessore dei setti di piombo e
delle caratteristiche geometriche dei fori. Nel caso di collimatori a fori circolari
paralleli (i più utilizzati in Medicina Nucleare), la lunghezza ed il diametro dei fori
influenzano fortemente la risoluzione del collimatore, che è determinata dalla
seguente formula:
𝑅𝑐 ≈
𝑑(𝑙𝑒 + 𝑏)
𝑙𝑒
Dove Rc = Risoluzione del collimatore; d=diametro dei fori; le = lunghezza effettiva
del foro del collimatore; b= distanza sorgente radioattiva-collimatore.
Possiamo dire che la risoluzione del collimatore migliora (cioè diminuisce) quando
il rapporto tra il diametro del foro e la lunghezza effettiva è il più piccolo possibile,
ossia quando utilizziamo fori lunghi. Essa peggiora man mano che aumenta la
distanza sorgente-collimatore.
Sensibilità planare di sistema
Descrive l’efficienza del sistema d’imaging nel rivelare le radiazioni alle quali è
esposto attraverso la dose effettiva iniettata al paziente. La sensibilità è definita
come il rapporto tra il rate di eventi rivelati e la dose di radiofarmaco utilizzata dal
paziente. Un modo equivalente di esprimere la sensibilità avviene attraverso
l’efficienza del rivelatore. Quest’ultima definizione è scarsamente utilizzata negli
ambienti clinici poiché considera soltanto la quantità di fotoni gamma emessi
26
durante la procedura diagnostica, che è inferiore rispetto la radioattività totale
associata al radiofarmaco assunto.
Prestazioni di sistema nei confronti della frequenza di conteggio
Corrisponde all’estensione a livello di sistema della capacità di conteggio degli
eventi del rivelatore. La metodica di misura standardizzata prevede il conteggio
ripetuto nel tempo di una sorgente di
99m
Tc, con attività iniziale tale da produrre
delle sostanziali perdite di conteggio dovute al tempo morto.
Esistono inoltre ulteriori caratteristiche che esprimono le prestazioni dei sistemi per
impiego tomografico o nella modalità di acquisizione mediante scansione lineare
del sistema.
27
1.5
La tomografia ad emissione
Le immagini acquisite con le gamma camere tradizionali forniscono dati
bidimensionali di un organo o apparato cha hanno invece strutture tridimensionali.
Per motivi clinici, al fine di ottenere maggiori informazioni diagnostiche, si
acquisiscono immagini della stessa sorgente da differenti proiezioni, ad esempio
posteriore, anteriore, laterali ed oblique, con un processo mentale d’interpretazione
delle immagini, si può risalire ad un’approssimativa struttura tridimensionale
dell’organo studiato. Queste problematiche sono risolte impiegando tecniche di
tomografia ad emissione [9]. Le metodiche tomografiche medico nucleare sono la
SPECT (Single Photon Emission Computed Tomography - tomografia ad emissione
di fotone singolo) e la PET (Positron Emission Tomopraphy – tomografia ad
emissione di positroni).
1.5.1 SPECT
Gli studi SPECT sono eseguiti con gamma camere a singolo rivelatore o multitesta.
Una serie d’immagini sono acquisite da varie proiezioni ottenute da diversi angoli
di visuale, uniformemente distribuiti su di un arco di 180° o 360°, con matrici di
acquisizione solitamente di 64x64 pixels. L’acquisizione avviene di norma con la
testata della gamma camera ferma, per poi passare alla successiva immagine dopo la
rotazione della testata di qualche grado (es. di 6° per ogni proiezione per un totale di
60 proiezioni per 360° o di 30 per 180°, con ogni proiezione che dura 30 secondi).
Questa tecnica di acquisizione è detta ‘step and shoot’, ma vi possono essere anche
tecniche di acquisizione in cui la testata della gamma camera è in costante ma
lentissimo movimento. E’ ovvio che con gamma camere multitesta il numero delle
proiezioni rimane invariato, ma si riduce il tempo di acquisizione. Successivamente
da queste immagini registrate dal computer con algoritmi matematici si otterrà la
ricostruzione dell’oggetto o dell’organo in esame. L’algoritmo più diffuso di
28
ricostruzione è sicuramente quello basato sul metodo della “filtered backprojection” (metodo della retroproiezione filtrata).
1.5.2 PET
Questa metodica sfrutta il fenomeno dell’annichilazione che si può realizzare
quando i fotoni di energia superiore a 1.022 MeV interagiscono con il campo
elettrico del nucleo formando un elettrone ed un positrone [10]. Il positrone ha la
carica elettrica di un protone ma massa pari a quella dell’elettrone, cosa che rende
l’atomo di positronio (sistema costituito da un elettrone e dalla sua antiparticella, il
positrone) 2000 volte più leggero rispetto all’atomo di idrogeno. Mentre l’elettrone
segue il destino delle radiazioni corpuscolari, il positrone, a seguito dell’interazione
con un elettrone converte la propria massa in energia sotto forma di due fotoni ad
altissima energia (0.511 MeV) nella banda dei raggi gamma, secondo il seguente
processo.
𝑒 + + 𝑒 − → 2 𝑓𝑜𝑡𝑜𝑛𝑖 𝛾
Questi fotoni gamma divergono tra loro di 180°, quindi ponendo dei rivelatori a
180° l’uno dall’altro, è possibile intercettare i fotoni emessi da un’annichilazione e
da qui risalire al punto esatto dove questo fenomeno è avvenuto. Diventa di
fondamentale importanza quindi il “circuito di coincidenza elettronica” dal
momento che ogni coppia di rivelatori può essere colpita sia da fotoni provenienti
dalla stessa annichilazione ma anche da altri fotoni. Tale sistema registra, di tutte le
coppie di eventi, solo quelli che ricadono in un ristretto arco temporale, che dipende
dal tempo di risoluzione dei rivelatori e dall’elettronica associata. Gli eventi che non
sono in grado di innescare i due rivelatori contemporaneamente non sono ritenuti
validi e, quindi, scartati.
29
Figura 1.7: Illustrazione della rivelazione in coincidenza in un tomografo PET.
Grazie a questo particolare sistema di rivelazione, sulle apparecchiature PET non si
rende necessaria la presenza del collimatore. Schematicamente il sistema di
rivelazione è costituito da una serie di rivelatori posizionati per formare un arco di
360° e, rispetto alle apparecchiature SPECT, il materiale utilizzato è germanato di
bismuto (BGO). Questo materiale presenta rispetto al cristallo di NaI un maggiore
potere frenante, fattore importante visto l’utilizzo di fotoni ad elevate energie
emessi dall’annichilazione, ma ha una ridotta resa di scintillazione. Rispetto alle
metodiche SPECT, la PET presenta una maggiore sensibilità, una migliore
risoluzione spaziale e permette di effettuare analisi quantitative di parametri
fondamentali quali il consumo di glucosio. La maggiore limitazione della metodica
è rappresentata dal fatto che i radionuclidi positrone-emittenti più utili sul piano
medico (11C, 13N, 15O, 18F), hanno un’emivita intrinseca breve, per cui è necessari la
presenza di un ciclotrone e di un laboratorio di radiochimica nelle immediate
vicinanze della sede di utilizzazione. Tuttavia alcuni radionuclidi positroneemittenti, quali
68
Ge, 82Rb, possono essere prodotti a partire da generatori portatili
(così come avviene per il Tecnezio-99m), riducendo così i costi.
30
1.6
Significato di emulazione e relativi vantaggi
Dalla trattazione fatta, è chiaro come l’utilizzo di sorgenti radioattive comporti tutta
una serie di complicazioni pratiche indispensabili per garantire la sicurezza.
L’uso di tecniche d’elaborazione d’impulsi digitali è ampiamente adoperato in
molti campi di applicazione di misura di radiazioni, per esempio nell’analisi
dell’ampiezza degli impulsi, nella selezione in funzione della forma d’onda, nelle
conversioni d’ampiezza o quelle di tipo TDC (Time to Digital Converter). Poiché
questi sistemi ed algoritmi stanno diventando sempre più complessi, è molto utile
disporre di simulazioni fedeli dei rivelatori e dei sistemi di acquisizione. Questo può
supportare, per esempio, gli studi di fattibilità preliminari, le sperimentazioni per
capire la risposta stessa del sistema oppure le prove di debug.
L’idea che ha motivato il mio lavoro di tesi sta nella possibilità di emulare sorgenti
radioattive reali con il fine di evitare tutti i problemi legati all’utilizzo di sorgenti
radioattive. Svariati sono i vantaggi derivanti dall’utilizzo di tecniche di
emulazione. L’utilizzo prolungato nel tempo di un emulatore di radiazioni non ha
alcuna controindicazione per i tecnici che lo adoperano rispetto all’impiego di
radionuclidi, quindi si ritrovano a lavorare in un ambiente sicuro, privo di
radiazioni. E’ possibile attribuire all’utilizzo di un emulatore una riduzione drastica
dei tempi e dei costi utili ad effettuare il debug dei macchinari di diagnostica
nucleare. Inoltre si trae beneficio anche dal punto di vista della qualità degli
esperimenti effettuati, in quanto l’emulatore permette di riprodurre particolari
condizioni sperimentali difficilmente riproducibili in brevi intervalli temporali da un
setup reale. Per di più tutte le operazioni possono essere effettuate anche da remoto
evitando così che il personale qualificato al trattamento di materiale radioattivo non
sia presente.
31
Capitolo 2 : Flusso di sintesi dei segnali
emulati
Questo capitolo si focalizza sugli argomenti teorici e pratici coinvolti nei segnali
prodotti dai rilevatori di radiazioni.
Bisogna tener conto di svariati passaggi che devono essere compiuti per una corretta
emulazione: generazione di una forma d’onda digitale, modulazione di ampiezza,
conversione da spettro di emissione ad ampiezza, statistiche di emissione,
generazione della baseline, emulazione di rumori e disturbi, shaping del segnale.
32
2.1
Conversione digitale-analogica dei segnali
Sicuramente il punto chiave del processo di emulazione risiede nella conversione
digitale-analogica del segnale generato digitalmente. Questo processo non è infatti
parte della tipica catena di acquisizione di un segnale di un sistema reale per
spettroscopia e deve pertanto essere il più trasparente possibile in termini di errori
additivi.
Il convertitore DAC all’interno di questo sistema complesso svolge due principali
funzioni: una funzione di conversione dal mondo digitale a quello analogico e una
funzione di ricostruzione. La ricostruzione è necessaria per rimuovere le alte
frequenze dei segnali campionati. La ricostruzione è fatta in due passi: un processo
sample-and-hold seguito da un filtro passa basso.
La figura 2.1 mostra l’effetto che si avrebbe senza l’utilizzo di un filtraggio passabasso.
Figura 2.1: Forma d’onda all’uscita dello stadio S&H del DAC
33
2.1.1 Ricostruzione ideale
Nel dominio delle frequenze la ricostruzione ideale elimina tutte le frequenze dello
spettro al di fuori della banda base. Idealmente la risposta in frequenza del filtro
ricostruttore dovrebbe essere:
fs / 2 f fs / 2
HR,id(f) = 1
for
HR,id(f) = 0
otherwise
Dove fs è la frequenza di campionamento e la corrispondente risposta all’impulso
dovrebbe essere:
h(t )
st
)
2
st
2
sin(
Poiché la risposta all’impulso h(t) di questo filtro è infinita e anti-causale non è
nella pratica realizzabile. E’, quindi, necessario approssimare questa risposta.
2.1.2 Ricostruzione reale
Una ricostruzione reale del filtro si ottiene approssimando la risposta ideale. Il
circuito S&H (sample-and-hold) è uno zero-order holder che presenta risposta in
frequenza:
H S & H ( s)
1 - e -sT
s
e che, nel dominio delle frequenze, risulta:
H S & H ( j ) j
T
e
j
T
2
sin(
t
2
t
2
)
34
Questa risposta mostra un andamento della fase proporzionale alla frequenza e
un’attenuazione
in
frequenza
tipica
di
una
funzione
sinc.
la risposta in ampiezza del circuito S&H, come si vede dalla figura 2.2, ha già una
caratteristica passa-basso con zeri a fs, 2fs, … . Comunque un ulteriore filtro
ricostruttivo analogico è indispensabile per attenuare le porzioni residue dello
spettro del segnale centrato ai multipli della frequenza di campionamento fs e per
compensare la distorsione di ampiezza in banda base, dalla DC fino a fs/2, dove
l’ampiezza vale 0.636 (-3.9dB). Inoltre l’attenuazione nelle zone di Nyquist
superiori non è così elevata e raggiunge ampiezza inferiore a 0.1 (-20dB) solo dalla
quinta zona in poi.
Figura 2.2: Confronto tra il filtro di ricostruzione ideale e la risposta che si ottiene
da uno zero-order holder (S&H)
La fase è un dato importante per certe applicazioni. Se è questo il caso, il progettista
deve tener conto anche della distorsione di fase in banda base e correggerla con
filtri passa-tutto sfasatori adatti allo scopo.
Le immagini del segnale nelle zone di Nyquist devono essere pesantemente
attenuate ed è anche necessaria una correzione della distorsione, rettificando la
banda base con il filtro ideale x/sin(x). Bisogna tenere in considerazione che se la
35
banda del segnale è una piccola frazione di fs la distorsione può essere trascurabile e
la compensazione non è sempre necessaria. Se invece la banda del segnale si
estende significativamente oltre una certa frazione della banda base è necessaria una
compensazione delle inevitabili distorsioni che si ritrovano. In questo caso è bene
adottare un filtro che idealmente abbia una risposta in frequenza del tipo x/sin(x).
2.1.3 Architettura di DAC a generatori di corrente
Questa categoria di DAC include architetture switching di correnti pesate secondo il
sistema binario, generatori di corrente unitari o metodi di divisione delle correnti a
segmenti. Queste tipologie utilizzano diverse strategie per ottenere un’ottima
linearità e tempo di settling particolarmente breve.
Un DAC a n bit di tipo current steering collega verso il nodo di uscita k generatori
su 2n generatori unitari totali, dove k è ricavato da una logica di controllo che
converte il dato binario in ingresso, dato formato dai bit bn-1, … , b1, b0. Tramite un
controllo binario vengono connesse insieme 2i sorgenti al nodo di uscita, dove i è la
posizione del bit nella parola digitale in ingresso. Questa architettura è
schematizzata in figura 2.3. La corrente in uscita risulta:
Iout = Iu[b0 + 2b1 + 22b2 + … + 2n-1bn-1]
36
Figura 2.3: (a) Controllo a pesi binari. (b) Controllo a pesi unitari
I generatori reali e gli switch reali non realizzano in verità la funzione di
trasferimento ideale.
E’ necessario tener conto di una resistenza di shunt Ru in parallelo ad ogni
generatore di corrente ed una resistenza interna dello switch Ron. L’equivalente
Norton di una singola cella è costituito d aun singolo generatore IN e una resistenza
RN verso massa:
IN
I u Ru VDD
Ru Ron
RN Ru Ron
Assumendo k = b0 + 2b1 + 22b2 + … + 2n-1bn-1 il nuoer di celle accese e RL la
resistenza in cui queste correnti vengono iniettate, il circuito equivalente globale
risulta quello mostrato in figura 2.4, dove gli equivalenti Norton delle sorgenti
vengono sommati e le k resistenze RN vengono connesse in parallelo.
37
Figura 2.4: (a) Semplice modello di una cella di un DAC current steering. (b)
Circuito equivalente totale
L’uscita in tensione risulta:
RN
k I R k
k In
n
L
RN
1 k
RL
k
RL
Vout
Dove RL / RN . L’equazione precedente è una relazione non lineare che deteriora
l’INL del convertitore e causa distorsione. L’INL misurato in LSB è espresso dalla
formula:
INL(k )
k (2 n 1)
k
1 k
for
k=0, … , 2n-1
Questo valore ha un minimo a metà dinamica ed è approssimativamente uguale a
(2 2n2 ) . Per ottenere INL inferiore all’LSB è necessario usare generatori di
corrente la cui resistenza shunt sia Ru RL 2 2n2 . Se ad esempio RL 25 e n =
12bit servirebbe Ru 100M .
38
Figura 2.5: FFT di una sinusoide pure campionata a 21 bit. (a) Segnale generatoda
un DAC single-ended. (b) Segnale generato da un DAC differenziale. Si può
osservare che la seconda armonica è trascurabile.
39
L’errore da INL è causato principalmente da una distorsione di seconda armonica.
Poiché i circuiti differenziali eliminano gli errori di ordine pari, l’uso di DAC
current steering differenziali rende trascurabile il limite posto dalla resistenza di
shunt finita dei generatori di corrente. Per applicazioni con frequenze massime
inferiori a 500 MHz è possibile usare un amplificatore operazionale che somma le
correnti attraverso una terra virtuale. Con la configurazione differenziale la tensione
di uscita è costante e l’effetto delle distorsioni viene quasi totalmente cancellato.
Un DAC a pesi binari combina insieme 2k - 1 unità di corrente in parallelo e usa il
k-esimo bit del dato digitale di ingresso per dirigere la corrente verso il nodo di
uscita oppure no. Questo approccio ha il vantaggio di non richiedere una esplicita
logica di conversione e controllo. Se invece si considera il metodo delle correnti a
pesi unitari, si nota che ogni cella necessita di una sua linea di pilotaggio; serve
quindi una logica che converta il dato binario in una scala termometrica. Questo può
richiedere una grande area su silicio anche per convertitori a pochi bit, infatti l’area
necessaria cresce esponenzialmente col numero di bit.
Il grande dispendio in termini di area è l’unica ragione per cui si preferisce la
decodifica a pesi binari. La selezione a pesi unitari dà infatti migliori performance
di commutazione poiché la grandezza di un glitch è proporzionale al numero di
interruttori che commutano insieme. Quando invece si usano pesi binari il numero
di elementi che commutano insieme non è proporzionale al cambio di codice
all’ingresso; per esempio in una transizione da metà dinamica a un quarto o a tre
quarti del full range tutti gli switch sono invertiti tranne uno.
Commutando tutti insieme gli interruttori si ottiene un glitch molto grosso. Se
invece si prende il caso dei pesi unitari, spostandosi di un quarto di dinamica per
volta si ha un numero di commutazioni proporzionale all’ampiezza del salto di
dinamica percorso: per piccoli salti il glitch è piccolo, per grandi salti il glitch è
maggiore. Ciò fa sì che la non linearità venga deteriorata solo in piccola parte.
40
Il metodo dei pesi binari ha inoltre caratteristica di DNL molto scarsa in alcuni
punti critici e genera errori anche peggiori del deterioramento dell’INL.
Un altro limite dell’approccio a pesi binari è che non garantisce monotonicità: nelle
transizioni critiche la corrente dei generatori può differire di più di 1 LSB, poiché la
corrente viene presa da sorgenti o gruppi di sorgenti diverse affette inevitabilmente
da mismatch.
Dopo queste considerazioni è chiaro che diventa preferibile la selezione a pesi
unitari, in quanto la selezione a pesi binari funziona correttamente solo per 4 o 5 bit.
Per limitare l’area di decodifica è una normale strategia di progettazione prevedere
una divisione tra codifiche a pesi unitari e binari usando una tecnica di
segmentazione. Un numero relativamente basso nL di LSB è convertito con una
selezione a pesi binari, mentre i rimanenti n – nL MSB utilizzano una decodifica a
pesi unitari. L’unità di corrente dei MSB è 2𝑛𝐿𝐼𝑢. Quando il DAC utilizza un
numero maggiore di bit è possibile dividere ulteriormente gli n – nL MSB. Si
ottengono quindi gli nL LSB, gli nI intermediate bits (ISB) e gli nM = n – nI – nL
bit più significativi (MSB). Il peso degli ISB è 2𝑛𝐿 e quella degli MSB è 2𝑛𝐿+𝑛𝐼.
La corrente dei tre DAC è semplicemente sommata insieme attraverso un nodo che
unisce le tre uscite. Il controllo della corrente del DAC intermedio richiede 2𝑛𝐿
segnali, mentre il controllo dei MSB richiede 2𝑛𝑀 linee.
L’area dell’architettura a segmentazione dipende dall’aera dei generatori di corrente
unitari e dall’area della circuiteria logica necessaria per generare e distribuire i
segnali di controllo.
41
Figura 2.6: Schema concettuale di un DAC current steering a segmentazione
Il massimo DNL permesso determina le dimensioni (WL) dei transistori MOS usati
per generare le correnti Iu nel DAC degli LSB a pesi binari.
2.1.4 Errori statici del DAC
La precisione richiesta dall’applicazione richiede di tener conto degli errori statici e
dinamici introdotti nella conversione D/A.
42
I principali errori statici (in DC) sono l’offset e l’errore di guadagno, entrambi
lineari e facilmente compensabili (figura 2.7). Vi sono inoltre gli errori di non
linearità differenziale e integrale (DNL e INL).
Offset ed errore di guadagno sono del tutto analoghi a quelli di un amplificatore.
Più precisamente gli errori di offset e di guadagno sono identici negli amplificatori e
nei DAC unipolari, ma differiscono nelle configurazioni bipolari.
La caratteristica di trasferimento di DAC e ADC può essere espressa in linea di
massima con la formula D = K + G·A, dove D è il codice digitale, A è il segnale
analogico, K e G sono costanti. In un convertitore unipolare, il valore ideale di K è
nullo; in un convertitore bipolare è -1 MSB. L’errore di offset è la differenza tra il
valore reale di K e quello ideale.
L’errore di guadagno è la differenza tra il guadagno reale e quello ideale, ed è
generalmente espresso come una differenza percentuale, dal momento che il valore
ideale di G è 1.
Figura 2.7:Non linearità, errori di offset e guadagno di un DAC.
Qualche altra volta può essere espresso in mV o LSB rispetto al FSR (Full Scale
Range).
43
L’errore di linearità integrale (INL) di un convertitore è analogo all’errore di
linearità di un amplificatore ed è definito come la massima deviazione del
trasferimento statico reale da quello ideale. Di solito viene espresso in percentuale
di FSR o in LSB.
L’errore di linearità differenziale (DNL) si riferisce alla linearità delle transizioni di
codice del convertitore. Nel caso ideale, una variazione di 1 LSB nel codice digitale
produce esattamente 1 LSB di variazione nel segnale analogico. In un DAC reale
ogni transizione può scostarsi di più o meno di 1 LSB e la grandezza espressa dal
DNL è proprio lo scostamento, calcolato per ogni transizione, del valore di uscita
reale rispetto al caso ideale.
Infine i missing codes non possono mai esistere in un DAC, poiché ogni ingresso
digitale genera una corrispondente uscita analogica.
2.1.5 Errori dinamici del DAC
Le più importanti caratteristiche dinamiche di un DAC sono il tempo di settling,
l’area di glitch, la distorsione e lo Spurious Free Dynamic Range (SFDR).
Il tempo di settling ingresso-uscita di un DAC è l’intervallo di tempo tra il cambio
di codice digitale (t = 0) e la stabilità dell’uscita analogica corrispondente al nuovo
codice entro una banda di errore predefinita (tipicamente sono utilizzate percentuali
del salto - 0,1% - 0,01% - o intervalli espressi in LSB – tipicamente ± ½ LSB o ± 1
LSB).
Il settling time è composto di quattro intervalli di tempo: il tempo di commutazione
(o tempo morto) durante il quale avviene il cambio del codice digitale, con uscita
analogica stabile; il tempo di slew, durante il quale la pendenza del segnale
analogico in uscita è fissa e uguale allo slew-rate del DAC; il tempo di recovery, in
cui il DAC si riprende dalla zona di slew-rate e può presentare overshoot; il tempo
44
di assestamento lineare, in cui il segnale analogico arriva a regime con un tipico
andamento esponenziale governato da costanti di tempo del circuito. Se il tempo di
slew è trascurabile rispetto agli altri tempi si ha che il settling time globale è
indipendente dal salto analogico che si vuole compiere. Se invece è il tempo di slew
a dominare, il tempo di settling è dipendente dal salto di tensione che si compie.
Figura 2.8: Definizione del tempo di settling di un DAC.
Idealmente quando l’uscita di un DAC cambia dovrebbe stabilizzarsi sul nuovo
valore in modo monotonico. Tuttavia può capitare che il segnale presenti overshoot,
undeshoot o entrambi. Questo comportamento non controllabile del DAC è definito
glitch. Può originarsi da due meccanismi: accoppiamento capacitivo delle
transizioni digitali con l’uscita analogica, o l’effetto di alcuni switch del DAC più
veloci degli altri, che producono per un breve periodo di tempo dei valori di uscita
spuri. Il glitch a metà dinamica prodotto dalla transizione 0111…111 e 1000…000
è di solito il caso peggiore di glitch, poiché tutti i bit (e gli switch) cambiano stato
logico.
45
Se si considera lo spettro di una forma d’onda ricostruita da un DAC a partire da
parole digitali, essa contiene componenti in alta frequenza con potenze significative
e non facenti parte del segnale. Queste componenti spurie sono normalmente
prodotte da rumore e distorsione. La distorsione viene normalmente espressa in
termini di distorsione armonica HDn, THD o SFDR, distorsione da intermodulazione (IMD) o entrambe. La distorsione armonica è definita come il rapporto
della potenza di una singola armonica (HDn) o di tutte le armoniche (THD) rispetto
alla potenza dell’armonica fondamentale, considerando il caso in cui venga
ricostruito dal DAC un singolo tono sinusoidale. Il parametro SFDR indica invece il
rapporto tra l’armonica più grande e la fondamentale. I glitch dipendenti dal codice
digitale producono spurie sia in banda che fuori banda quando il DAC genera una
sinusoide pura in un sistema DDS (Direct Digital System).
Il glitch di metà dinamica avviene due volte all’interno di un ciclo
(all’attraversamento di zero) e produce una seconda anarmonica della sinusoide. Si
noti che le armoniche di ordine maggiore rischiano di creare alias in banda base
senza lasciare la possibilità di filtraggio.
Il rapporto segnale-rumore SNR è il rapporto tra la potenza del segnale (di solito
un’onda sinusoidale) e la potenza di rumore totale (quantizzazione e rumore
elettronico). L’SNR tiene conto di tutto il rumore all’interno della banda di Nyquist.
2.1.6 Jitter di campionamento
Nei sistemi reali ogni segnale di clock presenta un’incertezza temporale nelle
transizioni e, questa incertezza, deteriora il processo di campionamento. Infatti
questo determina un’incertezza sugli istanti di campionamento. In figura 2.9 si
mostra graficamente l’effetto del jitter.
46
Figura 2.9: Errori causati dal jitter sugli istanti di campionamento.
Un errore positivo sul campionamento, δ(0), viene compiuto all’istante t = 0. Il
segnale sta crescendo e l’errore, ΔX(0), è positivo. Al successivo istante di
campionamento l’incertezza δ(T) è ancora positiva, ma in questo caso il segnale
decresce e l’errore sul campione ΔX(T) è dunque negativo.
Il comportamento piatto del segnale al tempo 2T porta a un errore trascurabile anche
se δ(2T) è significativo. Infine, un errore δ(3T) negativo genera un errore ΔX(3T)
negativo poiché il segnale analogico sta crescendo.
Si osserva dunque che l’errore sul jitter deteriora il valore campionato, e questo
errore dipende sia dall’entità del jitter che dalla derivata del segnale analogico.
Per un’onda sinusoidale 𝑋𝑖𝑛(𝑡)=𝐴∙sin (𝜔𝑖𝑛𝑡) l’errore ΔX(nT) è dato da:
Δ𝑋(𝑛𝑇)=𝐴∙𝜔𝑖𝑛∙𝛿(𝑛𝑇)∙cos (𝜔𝑖𝑛𝑛𝑇)
47
Assumendo δ(nT) il campionamento di una variabile casuale δji(t), ΔX(nT) è il
campionamento di 𝑥𝑗𝑖(𝑡)=𝛿𝑗𝑖(𝑡)𝜔𝑖𝑛𝑋𝑖𝑛(𝑡); si trascura lo shift di 90° dato dal
coseno.
Inoltre, se lo spettro di δji(t) è bianco, allora lo spettro di xji(t) è anch’esso bianco
poiché una modulazione fatta con un coseno non ha effetto sulla distribuzione di
potenza. Questo conduce a un modello di jitter casuale costituito da una sorgente di
rumore bianco xji(t) che si somma all’ingresso prima di un campionamento ideale.
La potenza dell’errore causato dal jitter diventa dunque:
⟨𝑥𝑗𝑖(𝑡)2⟩=⟨[𝐴∙𝜔𝑖𝑛∙cos(𝜔𝑖𝑛𝑛𝑇)]2⟩⟨𝛿𝑗𝑖(𝑡)2⟩
ovvero:
⟨𝑥𝑗𝑖(𝑡)2⟩=(𝐴𝜔𝑖𝑛)2/2∙⟨𝛿𝑗𝑖(𝑡)2⟩
Siccome la potenza di una sinusoide è A2/2, il corrispondente SNR risulta
SNRji,dB = -20log10{⟨ 𝛿𝑗𝑖(𝑡)⟩ 𝜔𝑖𝑛}
La figura 2.10 mostra il jitter del clock rispetto alla frequenza in ingresso necessario
per ottenere un dato SNR. Si osservi che per elevati valori di SNR e alte frequenze,
il jitter del clock deve essere di frazioni di picosecondi. Per esempio per
raggiungere un SNR di 90dB con 100MHz di sinusoide di ingresso serve un jitter
del clock inferiore 500 fs.
In realtà questa condizione è anche più stretta poiché intervengono altre sorgenti di
rumore che degradano l’SNR.
48
Figura 2.10: Jitter sul clock a diversi SNR e frequenze di ingresso.
49
2.2
Ampiezza degli impulsi correlata con lo spettro di
emissione
Il sistema viene inizializzato con uno spettro di emissione tipico della sostanza in
esame. Lo spettro può essere caricato in memoria attraverso una delle seguenti
procedure:
- Emissione pura. E’ possibile recuperare online da database appositi le
informazioni degli spettri di emissione degli isotropi e riadattarle al sensore che si
vuole emulare, tramite convoluzione con la sua funzione di trasferimento.
Figura 2.11: Spettro ottenuto convolvendo lo spettro della sorgente con la funzione
di trasferimento del sensore
50
- Simulazione accurata del sensore. Questa procedura prevede una simulazione di
tipo Monte Carlo del sensore in esame, in modo da poter caratterizzare anche effetti
secondari, quali l’effetto Compton e la risposta reale del sistema alle diverse
energie.
- Misura diretta dello spettro. E’ possibile utilizzare i canali di ingresso dello
strumento per analizzare gli impulsi provenienti da un sensore di radiazioni reale,
analizzarli ed estrapolare l’energia degli impulsi e quindi lo spettro della radiazione
incidente rilevata dal sensore fisico.
Figura 2.12: Spettro ottenuto per simulazione Monte Carlo di una sorgente di
emissione di 60Co rilevata da sensore in NaI.
- Conversione da immagine a spettro. Quando non è necessario emulare un preciso
spettro, ma è importante avere uno spettro approssimativo per fare dei test su
dell’apparecchiatura elettronica di elaborazione, è possibile convertire un’immagine
di uno spettro, presa direttamente da libri o siti web e caricarla nella memoria dello
strumento. Un algoritmo rende l’immagine a 1 bit, distinguendo, con una singola
soglia, lo spettro dallo sfondo. Molto spesso, per la scarsa risoluzione delle
immagini, è necessaria una post-elaborazione (in questo caso un’interpolazione).
51
Figura 2.13: Conversione di un’immagine in uno spettro.
La generazione delle ampiezze casuali, partendo da uno spettro energetico, avviene
attraverso un particolare algoritmo che modula l’uscita di un generatore di numeri
casuali (a densità di probabilità uniforme) secondo la forma dello spettro da
generare.
E’, infatti, sempre possibile generare una distribuzione di probabilità qualsiasi
partendo da una distribuzione uniforme e applicando ad essa una funzione F(x),
come mostrato in figura 2.14. In questo modo l’uscita dello stadio dipende
unicamente da un generatore a densità di probabilità uniforme, o, equivalentemente,
da un generatore di rumore digitale a spettro bianco.
52
Figura 2.14: Modulazione di uno spettro bianco.
Per comprendere il funzionamento dell’algoritmo, si pensi di dividere l’asse
dell’energia in intervalli ΔE, in numero pari a una potenza di 2. Per ogni intervallo
si ha un Dynamic Range (DR) massimo, anch’esso potenza di 2. Ovviamente
maggiore è il numero di intervalli di energia e più risoluto è il DR, migliore risulterà
la rappresentazione dello spettro.
Ogni colonnina ΔE dell’istogramma rappresenta la probabilità che l’impulso
generato abbia quell’energia. Ad esempio un’energia Ex con probabilità doppia
rispetto a un’energia Ey avrà colonnina alta il doppio rispetto alla colonna di Ey.
Facendo riferimento alla figura 2.15 si osserva che ogni quadrato delle varie
colonne viene sequenzialmente numerato. Si fa in modo, inoltre, che il numero
totale di quadratini sia una potenza di 2. In questo modo il generatore di numeri
casuali diventa l’indirizzo a una locazione di memoria che restituisce l’energia della
colonnina a cui appartiene.
53
Figura 2.15: Generazione delle ampiezze casuali partendo da uno spettro di
energia.
E’ immediatamente evidente che una colonnina alta il doppio di un’altra ha
probabilità doppia di essere selezionata.
Tuttavia questo tipo di algoritmo è molto dispendioso in termini di memoria, poiché
vi è una ridondanza dei dati estremamente elevata, e un singolo spettro con DR di
16 bit (ordinata dello spettro) e 16 bit che rappresentano i livelli di energia (ascissa
dello spettro) può occupare in memoria fino a 8GB.
E’ stato perciò raffinato l’algoritmo per ridurre la memoria necessaria. Questa
versione dell’algoritmo non è presentata in questa sede. Si consideri tuttavia che con
l’algoritmo ottimizzato un singolo spettro occupa solamente 256 kBytes di
memoria.
La generazione dei numeri casuali avviene in un blocco dedicato, che deve
presentare una distribuzione di probabilità il più possibile piatta. E’ tuttavia
impossibile ottenere un blocco di generazione realmente casuale utilizzando solo
della logica. Infatti in questo caso si possono ottenere solo delle sequenze pseudocasuali, ovvero dei set di numeri che si ripetono periodicamente.
Si può però sfruttare ugualmente questo comportamento non ideale se si progetta il
blocco in modo tale che il periodo del pattern sia sufficientemente lungo, e molto
più lungo del tempo di utilizzo medio dello strumento.
54
Figura 2.16: Schema di un LFSR a 64 bit.
Tra i molti algoritmi presenti in letteratura per la generazione dei numeri casuali si è
scelto di implementare, per la sua semplicità, un blocco LFSR (Linear Feedback
Shift Register) a 64 bit, caratterizzato da un lungo shift register a 64 bit e tre porte
XOR (figura 2.16). Questo particolare blocco genera un pattern lungo 2m - 1
campioni, dove m è il numero di bit usati (in questo caso 64). Con un clock di 1
GHz il pattern ha un periodo maggiore di 500 anni, periodo di tempo sufficiente per
approssimare il comportamento pseudo-casuale a uno totalmente casuale.
E’ anche vero che molto spesso, e anche in questa applicazione, serve un generatore
di numeri casuali che generi uscite a più di un bit. Si può pensare di ottenere un
numero casuale a più bit sommando tante uscite a un bit, ma questo può essere
molto dispendioso in termini di tempo. E’ anche possibile analizzare le formule che
descrivono questo blocco logico per ottenere un circuito che si complica solo nella
logica di feedback, generando però dei numeri casuali a più di un bit.
55
Figura 2.17:Aucotorrelazione di un vettore contenente 1.5 milioni di numeri casuali
generati con (a) l’implementazione del LFSR e con (b) la funzione “rand” di
MATLAB.
La figura 2.18 mostra un risultato sperimentale del blocco di generazione delle
ampiezze partendo da uno spettro di energia caricato in memoria.
56
Figura 2.18: (a) Spettro di riferimento e (b) spettro generato e ricostruito con un
istogramma. La differenza in energia assoluta è dovuta alla mancanza di una
scalatura. Si noti, tuttavia, come i rapporti di forma e distanza siano rispettati.
57
2.3
Generazione dei tempi statistici di arrivo degli
impulsi
L’emissione di radiazioni atomiche e nucleari obbedisce alle leggi della fisica
quantistica, e quindi, quando si parla di eventi, non è possibile parlare
deterministicamente del tempo tra due emissioni consecutive, ma solo di
probabilità.
E non è quindi mai possibile calcolare il numero esatto di emissioni, poiché questo
differirà in ogni misura. E’ tuttavia possibile farne uno studio statistico e
determinare alcune caratteristiche dell’emissione, come ad esempio media, varianza
e natura della distribuzione statistica.
Se si prende in esame il fenomeno del decadimento radioattivo si può
immediatamente osservare anche da pochi dati sperimentali che esso ha natura
statistica. Per un gran numero di eventi (rate di emissione molto alti) la variazione
rispetto a media e varianza è piccola e tipicamente questo comportamento viene
descritto da una distribuzione di tipo gaussiano:
P ( n)
dove
n
1
2
( nn )2
e
2 2
è il valor medio degli eventi che avvengono nelle varie misure e σ è la
deviazione
standard
dal
valor
medio.
Quando invece il rate di emissione è basso nel tempo di misura la distribuzione
tende ad assumere una statistica di tipo poissoniano:
P ( n)
n n n
e
n!
dove P(n) è la probabilità normalizzata che in un dato intervallo vengano osservati n
eventi, con 𝑛� il numero medio di eventi che vengono misurati confrontando molte
misure.
58
Nell’emulazione di tali fenomeni è quindi indispensabile riprodurre la statistica di
emissione della sorgente, costruendo degli intervalli di tempo tra gli eventi che
rispettino una data distribuzione di probabilità.
Nel caso della distribuzione poissoniana la probabilità di un dato evento è dato dal
prodotto della probabilità che non ci siano eventi da 0 a t per la probabilità
differenziale che ci sia un evento in un dt:
𝐼(𝑡)𝑑𝑡=𝑃(0)∙𝑟∙𝑑𝑡
dove r è il rate medio di emissione. Sostituendo si ottiene:
𝐼(𝑡)=𝑟𝑒−𝑟𝑡𝑑𝑡
Per la generazione dei tempi si ricorre a una struttura del tutto simile a quella
adottata per generare la distribuzione delle energie, applicando solamente una
diversa distribuzione e una diversa scalatura delle costanti.
Figura 2.19: Schema a blocchi del circuito di generazione dei tempi.
59
Per generare gli intervalli temporali è stato inoltre introdotto un contatore che
calcola i tempi e genera dei segnali di start, che vengono usati come interrupt
globali in tutta la catena di generazione. Lo schema a blocchi è mostrato in figura
2.19.
Un generatore di numeri casuali a spettro bianco viene modulato da una funzione di
densità di probabilità e vengono estratti i tempi di occorrenza degli eventi, che
vengono inseriti in un contatore che genera effettivamente i tempi a partire da un
segnale di clock molto veloce.
E’ possibile infine decidere se il sistema si deve comportare in modo nonparalyzable (il sistema inibisce ogni generazione di eventi per un tempo τ seguente
alla generazione di un altro evento) o paralyzable (se un evento viene generato
entro un tempo τ dalla generazione di un altro evento, il nuovo evento viene
ignorato e il sistema ignora ulteriori eventi che si generano entro un tempo τ dal
nuovo evento).
60
2.4
Forma dell’impulso digitale
L’uscita dell’emulatore è un segnale analogico formato da una sequenza di impulsi
la cui forma deve emulare il complesso del sistema di rivelazione, formato in
generale da un sensore e da un front-end analogico.
Una singola interazione radiazione-materia produce normalmente nel sensore un
certo numero di elettroni, in quantità proporzionale all’energia della radiazione
incidente. Vi sono quindi degli elettrodi sul sensore che raccolgono la carica
generata e la inviano allo stadio analogico.
La forma del segnale di corrente in uscita dal sensore dà informazioni su come le
cariche vengono raccolte. I tempi di raccolta possono variare da pochi ns fino ai ms
e la forma del segnale riflette queste tempistiche. In molti rivelatori la raccolta delle
cariche è molto rapida ed è possibile schematizzare il segnale di raccolta delle
cariche come in impulso di corrente.
Inoltre a seconda del rate di emissione è possibile pensare di acquisire i singoli
impulsi e analizzarli, ovvero in pulse mode, oppure mediare gli impulsi tramite
filtro passa basso e analizzare l’andamento del rate più che delle singole interazioni
(questo studio può essere fatto nelle modalità current mode o mean square pulse
mode – MSV).
Nella maggior parte delle applicazioni si preferisce operare in pulse mode, poiché le
informazioni di energia e timing sono molto importanti e danno informazioni sulla
natura dell’interazione o sul suo spettro energetico.
Il front end analogico è poi fonte di distorsione degli impulsi, che normalmente
vengono volutamente allargati per permettere una più agevole misura dell’energia.
Nelle applicazioni più comuni si verifica che il fronte di salita resta pressoché
inalterato rispetto a quello dell’impulso di corrente in uscita dal detector, mentre
viene a crearsi una coda tipicamente esponenziale di costante di decadimento τ.
61
Figura 2.20: Schema a blocchi del circuito di emulazione della forma d’onda degli
impulsi.
Quando τ è molto inferiore al tempo di raccolta delle cariche nel sensore il segnale
in uscita dal front-end ricalca quasi perfettamente la forma d’onda dell’impulso, e
questa modalità viene usata quando è più importante la misura dei tempi rispetto a
quella dell’energia. Nel caso opposto, quando τ è molto grande rispetto al tempo di
raccolta, si ha un’integrazione della carica totale (Vmax = Q/C) e una lunga coda
esponenziale (τ = RC). L’integrazione della carica permette una misura energetica
62
più accurata, anche se richiede dei tempi di scarica notevoli che possono permettere
l’analisi efficace solo a bassi rate di emissione.
Se infatti la capacità su cui la carica viene integrata non riesce a scaricarsi prima
dell’arrivo di un altro impulso si verifica un fenomeno conosciuto come pile-up,
ovvero la sovrapposizione della risposta di più impulsi. Il primo impulso non è
ancora esaurito quando parte il secondo: le risposte analogiche si sommano e una
coda esponenziale si somma al secondo impulso, deteriorando la misura
dell’energia.
L’emulatore è in grado di ricostruire una forma d’onda arbitraria precaricata in
memoria, sfruttando, se necessario, anche un blocco di interpolazione per emulare
la forma d’onda per tempi lunghi senza occupare memoria in quantità eccessive.
Il blocco di emulazione della forma d’onda viene mostrato in figura 2.20. La
memoria in cui è salvata la forma d’onda viene letta e questa moltiplicata per una
costante che proviene dal blocco generatore di ampiezze. In questo modo è possibile
associare all’impulso la relativa informazione di energia.
Una soglia permette di riconoscere quando la forma d’onda si è esaurita, ovvero
quando risulta più piccola di un certo valore fissato: infatti per impulsi piccoli i
valori significativi della forma d’onda saranno presenti per un minor numero di
campioni a causa della scalatura e del fondo di rumore dello strumento.
Vi è inoltre un interpolatore che permette di emulare lunghi impulsi a partire da
pochi campioni salvati in memoria (con waveform di pochi kBytes). Infine un filtro
passa basso filtra gli impulsi per dare un valore medio (filtro attivato solo in
current-mode).
Il sistema permette di generare anche impulsi in pile-up, fino a 16, e questo è
possibile solo grazie all’utilizzo di 16 circuiti generatori di forma d’onda in
parallelo, con 16 interpolatori. Poiché il circuito interpolatore è relativamente
dispendioso in termini di calcolo computazionale (e quindi area su FPGA) sono
63
state implementate 16 copie di un interpolatore lineare, una per ogni canale di
generazione, per permettere la funzione di pile-up.
Appositi segnali di controllo permettono di emulare sistemi paralyzable e nonparalyzable, oppure di permettere fino a 16 pile-up contemporanei.
Oltre alle forme basate sulla memoria, viene anche utilizzato un sistema basato su
un filtro RC-RC emulato, il cui schema a blocchi è mostrato in figura 2.21. Esiste
un IIR la cui
di decadimento è la medesima dell’esponenziale e un altro IIR passa
basso per poter regolare il rise time.
Figura 2.21: Schema a blocchi del filtro RC-RC emulato.
Il vantaggio consiste nella possibilità di non essere limitati per quanto concerne il
numero di forme da porre in pileup, né limitazione dal punto di vista della
lunghezza degli impulsi, ma lo svantaggio sostanziale consiste nell’impossibilità di
personalizzare la forma d’onda, potendo realizzare solo esponenziali.
64
2.5
Emulazione della baseline
Il riferimento di un segnale analogico, denominato baseline (“linea di base”) spesso
non è stabile e varia nel tempo. Questa variabilità dipende tanto dal rate di
emissione (ad esempio ciò è evidente nei sistemi accoppiati in DC con scarsa
cancellazione del doppietto polo-zero), quanto da effetti quali drift termici o
temporali dovuti sia al sensore che all’elettronica a valle.
La misura di un segnale analogico fatta quando la linea di base è instabile porta a
inaccuratezze e a un allargamento dello spettro di energia. Vi sono pertanto circuiti
che eseguono la misura in modo differenziale tra il segnale e la linea di base,
circuiti che annullano la linea di base (BLR – Base Line Restorer) o apposite
tecniche di signal procesisng.
Come descritto precedentemente, lo strumento permette di emulare anche i
comportamenti non ideali del sistema, e il drift della baseline è uno di questi.
Figura 2.22: Schema a blocchi del circuito di emulazione della linea di base.
65
Il blocco di emulazione della baseline (figura 2.21) è costituito da una piccola
memoria che contiene alcuni punti della funzione di baseline che viene letta per
estrarre una forma d’onda che viene interpolata. Infatti la baseline è molto
lentamente variabile e serve un interpolatore per ridurre la memoria necessaria a
contenere la forma d’onda. Proprio per la lenta variabilità l’interpolatore dev’essere
particolarmente accurato e garantire una funzione interpolata che abbia qualche
derivata continua. Nello specifico è stato implementato un interpolatore di tipo
spline cubico, che garantisce continuità C2 (si osservi il paragone tra interpolazione
lineare e cubica di tipo spline in figura 2.22). La computazione è elevata e quindi
anche l’area occupata, ma è un dispendio di risorse che è possibile affrontare poiché
serve un solo emulatore di baseline in tutta la catena di generazione (e non 16 copie
identiche come per il caso del pile-up).
Figura 2.23: Interpolazione lineare (rosso) e cubica spline (blu).
66
2.6
Emulazione del rumore
Tra le altre non idealità del sistema troviamo sicuramente il rumore. Questo
elemento intrinseco di ogni sistema è causa di deterioramento del segnale. Il
parametro di interesse è solitamente espresso come rapporto segnale-rumore SNR.
In questo sistema sono attualmente emulabili tre tipiche sorgenti di rumore: rumore
termico, rumore in bassa frequenza e rumore shot.
In un tipico sistema di acquisizione con front-end analogico (mostrato
schematicamente in figura 2.23) sono presenti le seguenti sorgenti di rumore:
rumore dell’amplificatore riferito all’ingresso, rumore shot della corrente di
polarizzazione del sensore, rumore termico di resistori in serie e parallelo.
Figura 2.24: Sorgenti di rumore in uno stadio front-end per rivelazione nucleare.
Il blocco di emulazione genera dei valori casuali e li modula secondo una funzione
che varia in frequenza e che rappresenta il tipico stadio di amplificazione. Il rumore
viene aggiunto al segnale alla fine della catena di generazione, attraverso un nodo
sommatore.
67
Dal punto di vista dell’emulatore, il segnale generato è il segnale all’uscita del
preamplificatore. Svolgendo i calcoli, si trova che il rumore all’uscita risulta pari a:
2 A
4k B T
2
2
(
v
)
2
eI
R
f
4
k
TR
d s
B
s GAIN ( f ) df
0 as f
Rp
Vn,out ( f )
Figura 2.25: Schema a blocchi del circuito generatore di rumore digitale
Per emulare questo rumore è stato creato un blocco a tre vie, come mostrato in
figura 2.24. Tre generatori di rumore bianco vengono modulati da un filtro e le tre
uscite sommate in un singolo nodo che a sua volta viene sommato al segnale
generato dagli altri blocchi dello strumento. Infatti cercare di costruire un rumore
bianco a partire da uno spettro tramite trasformata di Fourier inversa sarebbe un
costo computazionale troppo elevato, soprattutto con throughput intorno ai 300
MSps. Utilizzando tre cammini si riescono a generare, una volta pesati
opportunamente i coefficienti dei filtri IIR, le componenti in bassa, media e alta
frequenza del rumore (figura 2.25).
68
Figura 2.26: Risposta in frequenza dei tre filtri IIR.
69
2.7
Shaping dell’uscita
Quando si eseguono misure dell’energia sugli impulsi proveniente da un sensore di
radiazioni, molto spesso viene eseguito un filtraggio particolare, che prende il nome
di shaping. Questa operazione genera, a partire dagli impulsi, una forma d’onda che
ha le caratteristiche per eseguire una misura a SNR ottimo. Tipici esempi di shapers
sono i formatori CR-RC o semi-gaussiani.
Il formatore CR-RC implementa in cascata un blocco differenziatore CR e un blocco
integratore RC, con le caratteristiche forme d’onda di figura 2.26b e risposta in
frequenza descritta dall’equazione:
H ( s) |CR RC
ds
( ds 1)( i s 1)
Il formatore semi-gaussiano è costituito invece da un blocco differenziatore e da N
blocchi integratori in cascata. Prende questo nome dal fatto che maggiore è N,
maggiore è la somiglianza della risposta all’impulso con una curva gaussiana. Lo
schema a blocchi di questo shaper è mostrato in figura 2.27 e la sua risposta
all’impulso è:
H ( s) | SG
ds
A n
)
d s 1 is 1
(
70
Figura 2.27: (a) Schema di principio del formatore CR-RC. (b) Tipiche risposte
all’impulso e allo scalino.
Figura 2.28: Schema a blocchi di un formatore semi-gaussiano.
71
Nell’emulazione è importante tener conto anche del front-end analogico, e pertanto
è necessario prevedere un blocco di filtraggio che possa comportarsi esattamente
come un circuito formatore. A questo scopo è stato implementato un blocco IIR del
quarto ordine programmabile e riconfigurabile, che permette di riprodurre il
comportamento di shaper analogici quando richiesto. Lo schema a blocchi è
riportato in figura 2.28.
Figura 2.28: Schema di principio del filtro IIR.
72
Capitolo 3 : Emulatore di detector di
radiazioni a singolo canale
Il concetto di emulatore di detector di radiazioni è relativamente nuovo e ad oggi
esiste sul mercato un solo tipo di sistema progettato e sviluppato presso il Digital
Electronic Lab del Politecnico di Milano [24]. Di seguito saranno riportate le
caratteristiche principali dell’emulatore in questione.
Figura 3.1: Detector di radiazione a 2 canali Progettato dalla Nuclear Instruments.
73
3.1
Principio di emulazione
Attualmente ci sono strumenti elettronici capaci di generare segnali con forme
d’onda esponenziali, ampiezza costante e con distribuzione temporale di tipo
esponenziale. Resta, di fatto, la limitazione sulla possibilità di modulare l’ampiezza
degli impulsi generati secondo uno spettro di energia dato. Questo problema è stato
superato attraverso la registrazione di una lunga sequenza di eventi (i cosiddetti
“generatori arbitrari di forme d’onda”) che, di contro, erano fortemente limitati dalla
dimensione della memoria disponibile, e quindi nella lunghezza del segnale e della
frequenza di conteggio.
Il DDE (Digital Detector Emulator) oltre a fornire tutte le funzionalità standard, è
capace di generare un segnale elettrico che emula completamente i sistemi di
rivelazione reali. Lo strumento nasce per emulare un sistema di rivelazione reale in
assenza di una sorgente radioattiva e del rivelatore. L’emulatore viene inizializzato
con le caratteristiche del sistema di rivelazione ed è quindi capace di generare un
segnale analogico simile all’uscita di un sistema di rivelazione reale.
Lo strumento emula l’uscita di un processo di rivelazione basandosi sulla
descrizione del rivelatore e sulla risposta dell’elettronica di front-end che può essere
calcolata analiticamente o misurata sperimentalmente. Scegliere la sorgente
radioattiva da emulare corrisponde ad impostare sullo strumento le proprietà
d’emissione, ad esempio i valori dei picchi di energia, la statistica temporale di
emissione o la forma dello spettro energetico. Per rendere più realistica
l’emulazione, è possibile introdurre degli effetti ausiliari come l’abilitazione del
pile-up, il drift della linea di base, il rumore dell’elettronica (bianco ed 1/f) e più in
generale
qualsiasi
disturbo
presente
nell’ambiente
dove
si
svolge
la
sperimentazione. L’emulatore mette a disposizione una serie di regolazioni
riguardanti la funzione di trasferimento del preamplificatore dal punto di vista della
forma dei segnali e limitazioni elettroniche, come vincoli di slew rate e saturazione.
74
Il sistema offre un controllo dettagliato di tutte le caratteristiche del processo di
generazione, rivelazione ed acquisizione.
Il flusso di eventi d’uscita segue a sua volta una distribuzione statistica che emula
gli spettri energetici e temporali d’ingresso.
La sequenza di dati può essere
reinizializzata con nuovi dati casuali per ottenere sempre sequenze diverse o con lo
stesso seme iniziale per riprodurre la stessa sequenza più volte. La possibilità di un
controllo particolarizzato di ogni parametro consente lo studio di ogni variazione
del sistema e la predizione del risultato degli algoritmi d’analisi. Inoltre all’utente
viene data la possibilità di provare casi specifici e portare i parametri ai limiti fisici
per testare l’elettronica di lettura.
Figura 3.2: Presentazione dell’emulatore di radiazioni.
75
3.2
Processo di emulazione
Figura 3.3: Schema a blocchi del processo di generazione degli eventi
L’algoritmo di emulazione genera eventi pseudo-casuali secondo le distribuzioni
statistiche, energetica e temporale date in ingresso. Lo spettro d’energia d’ingresso è
utilizzato per modulare l’ampiezza degli impulsi mentre la statistica temporale
viene utilizzata per simulare l’intervallo temporale tra due impulsi consecutivi. Il
sistema può essere controllato dall’utente attraverso un software che consente la
programmazione dell’intero sistema con pochi click. L’hardware dell’emulatore
sfrutta la potenza d’elaborazione di un FPGA che esegue milioni di operazioni al
secondo, generando un flusso digitale di dati che viene convertito nel dominio
analogico attraverso una coppia di convertitori analogico digitale (ADC) a 16 bit
125 MSPS. Il segnale analogico può essere mandato in uscita attraverso un filtro o
76
meno a seconda che si vogliano ottenere migliori performance in termini di rumore
d’uscita o tempo di salita.
La forma del segnale può essere generata da un circuito d’integrazione digitale
equivalente oppure da un gruppo di 16 memorie. Il primo algoritmo permette la
generazione di segnali esponenziali (di cui si può impostare il tempo di
salita/discesa) senza alcuna limitazione sul numero di eventi in pile-up. Il secondo
consente la generazione di forme d’onda arbitrariamente programmabili con innesto
di eventi in pile up fino ad un massimo di 16. L’FPGA genera il segnale di trigger
che sincronizza la base dei tempi in funzione della distribuzione temporale
programmata. E’ anche possibile emulare due differenti forme d’onda composte
sullo stesso canale. Questa caratteristica consente il test di sistemi dedicati alla
discriminazione della forma d’onda degli impulsi.
In un processo di debugging di un sistema di elaborazione digitale l’emulatore
consente un controllo molto accurato di tutti i parametri che influenzano le misure
di energia ed di tempo di occorrenza degli eventi. Mentre il circuito integratore
emula il comportamento di un impulso analogico reale, il sistema basato sulla
memoria emula gli effetti del pile-up facendo partire la lettura di una nuova
memoria non appena arriva un impulso di trigger. Il segnale complessivo d’uscita è
ottenuto sommando ogni singola uscita delle 16 memorie. Questo segnale infine
può essere sommato al rumore con il fine di ottenere un’emulazione più realistica.
Il sistema può emulare rumore bianco, rumore 1/f, e rumore di tipo random walk. E’
anche possibile sommare più sorgenti di rumore così come interferenze fra gli
eventi. Il rumore 1/f può essere impostato sia in ampiezza che in frequenza. È anche
possibile emulare dei pattern di rumore periodico causato, per esempio,
dall’alimentazione switching. Quest’ultimo disturbo può essere di ampiezza
costante o casuale e può presentarsi con un determinato jitter impostabile
dall’utente.
77
Il sistema emula inoltre il drift nel tempo del valore della linea di base seguendo un
profilo generico programmabile. Attraverso la funzione d’interpolazione, è possibile
raggiungere drift di estesa durata, fino ad 1 secondo.
78
3.3
Principali caratteristiche del DDE (Digital Detector
Emulator)
Il sistema è capace di emulare due diverse sorgenti di radiazioni allo stesso tempo e
fornirne i rispettivi segnali sulle due uscite, oppure di sommarli sulla stessa uscita.
Le due catene dell’emulatore possono avere dei settaggi completamente
indipendenti oppure possono avere dei parametri correlati. Per esempio, i due canali
possono essere correlati in quanto condividono lo stesso spettro energetico e lo
stessa statistica temporale oppure possono avere una correlazione di tempo fissa tra
gli eventi rispettivi. Inoltre è anche possibile impostare lo strumento in
configurazione master/slave, dove l’uscita del primo canale lavora come trigger per
il secondo. La correlazione tra gli eventi è utile, per esempio, nei sistemi di
debugging PET o in quelli esperimenti che coinvolgono misure sul tempo di volo
oppure per simulare la rivelazione di piccoli segnali estratti in un alto livello di
segnali di fondo.
Emulazione multiforme
L’emulatore è in grado di generare due differenti forme d’onda con statistiche
programmabili separatamente per testare sistemi che discriminano le forme degli
impulsi.
Figura 3.4: Due differenti forme d’onda sullo stesso canale d’uscita.
79
Esistono diverse sperimentazioni dove la discriminazione tra le particelle è fatta
attraverso le loro differenti forme d’onda. Un esempio di quanto detto è la
separazione delle particelle neutroni-gamma. L’emulatore, potendo simulare due
diversi impulsi, permette di simulare le risposte diverse dei neutroni e dei fotoni
gamma, in modo tale da effettuare delle prove senza disporre di specifiche sorgenti
radioattive. Tutto ciò equivale ad avere un’emulazione realistica, limitando l’uso di
sorgenti radioattive pericolose.
Generatore di forme d’onda
L’emulatore comprende un generatore di forme d’onda arbitrario (1 milione di punti
per canale) per emulare un segnale analogico salvato dall’utente. La frequenza
massima di campionamento dei segnali emulati resta fissa a 125Msps.
Inoltre il DDE (Digital Detector Emulator) ha precaricate le forme dei più comuni
segnali come onde sinusoidali, onde quadre, rampe, segnali a dente di sega, etc. La
frequenza di emissione di tali segnali va da 1mHz a 10 MHz. Altre caratteristiche
attinenti la funzione di generatore di segnali sono la possibilità di usufruire del
controllo automatico della fase iniziale della forma d’onda sinusoidale e la
generazione di rumore in uscita.
Esecuzione di sequenze pre-registrate
L’utente può programmare delle sequenze predisegnate di impulsi attraverso la
definizione di file cvs i quali contengono le ampiezze e gli intervalli temporali fra
gli impulsi. L’emulatore è capace di generate fino a 500k impulsi usando le
informazioni fornite dalla sequenza dell’utente. Questa caratteristica è utile per
stimolare gli algoritmi di processamento con un segnale ben definito senza perdere
la possibilità di generare rumore casuale ed interferenze.
80
Generazione pseudo-casuale
Quando il processo di emulazione viene resettato, i kernel dei generatori sono
reinizializzati con nuovi dati casuali (da una sorgente fisica) creando delle sequenze
sempre differenti. Per ottenere le stesse sequenze d’impulsi, il sistema utilizza un
generatore di numeri casuali particolari che sottolinea il processo di emulazione di
eventi pseudocasuali. E’ possibile reinizializzare i generatori di numeri casuali con
un valore ben noto per ottenere sempre la stessa sequenza. In questo senso è
possibile avviare il tool per ottenere sequenze di bilioni di impulsi per poi riavviare
il generatore di numeri casuali dallo stesso seme iniziale e riottenere esattamente la
stessa sequenza di dati salvando esclusivamente il seme iniziale.
81
Capitolo 4 : Generazione dei ritardi
E’ possibile, nella versione a due canali del Digital Detector Emulator sulla quale,
per l’appunto, si è incentrato il mio lavoro, correlare le due uscite analogiche in tre
modi differenti.
I due canali possono essere usati in una configurazione master-slave. Il canale
master ha il proprio generatore della base dei tempi, mentre il canale slave genera
un segnale con un delay programmabile rispetto al canale master. La risoluzione di
questo ritardo programmabile è di circa 12 ps. Questa è una caratteristica piuttosto
peculiare e, anche se esistono dispositivi con una maggior risoluzione temporale,
nessuno di questi è in grado di generare allo stesso tempo segnali analogici con una
forma, un’energia e una distribuzione temporale del tutto programmabili.
L’elevata risoluzione del delay programmabile rende lo strumento particolarmente
utile per progettare e debuggare le misure che coinvolgono tempi di volo, come per
esempio in esperimenti di fisica ad alta energia, oppure correlazione temporale,
come nelle applicazioni PET, dove la correlazione definisce una finestra di
accettazione dei fotoni. In questa ultima applicazione, la risoluzione richiesta è
dell’ordine dei 100 ps, quindi circa 10 volte peggiore rispetto a quella che fornisce il
Digital Detector Emulator.
Le tre modalità operative disponibili sono:
-
Prima modalità: il canale slave genera lo stesso evento del canale master,
traslato nel tempo.
-
Seconda modalità: i due canali sono totalmente indipendenti e solo
temporalmente correlati. Questo significa che ad essi possono essere
assegnati differenti spettri di energia, contributi di rumore, interferenze,
forme d’onda e il canale master funziona solo come trigger per il canale
slave con un ritardo temporale programmabile.
82
-
Terza modalità: l’emulatore può essere programmato per generare segnali
correlati nel tempo e nell’energia. Oltre ai due canali fisici esiste un terzo
canale dentro l’emulatore che può essere utilizzato per iniettare impulsi
correlati. Il terzo canale ha una statistica completamente indipendente, sia in
ampiezza che nel tempo, e inietta lo stesso evento nelle due uscite.
L’architettura hardware e firmware che realizza l’emulazione della correlazione
temporale è mostrata in figura 4.1. Un generatore di clock a basso jitter produce un
segnale che viene diviso in tre linee differenti da un distributore di clock. Una di
queste viene utilizzata come clock per l’FPGA. I due canali vengono sincronizzati
mediante l’utilizzo proprio di questo segnale di clock. Le altre due uscite del
distributore sono mandate all’ingresso di due linee di ritardo integrate, lungo le
quali è possibile inserire un ritardo di tempo.
Le linee ritardate vengono quindi utilizzate rispettivamente come linee di clock dei
due DAC che sono connessi alle uscite dei due canali digitali dell’FPGA. In questo
modo i due canali, nonostante siano stati generati in maniera sincrona, possono
essere traslati nel tempo da un intervallo di tempo programmabile.
Il mio lavoro di tesi si concentra, in particolare, proprio sulla progettazione
dell’architettura hardware/firmware per lo sfasamento di due flussi di impulsi nel
tempo mediante due percorsi di segnale.
83
Figura 4.1: Rappresentazione a blocchi della generazione del ritardo.
84
4.1
Specifiche generiche del sistema
Com’è possibile osservare per mezzo dello schema a blocchi (figura 4.2), i DAC
ricevono la forma d’onda d’interesse al proprio ingresso in forma digitale, la quale
viene convertita e replicata analogicamente all’uscita in corrispondenza dell’istante
di tempo in cui il segnale di clock, eventualmente ritardato, raggiunge il DAC
stesso.
Figura 4.2: Schema a blocchi.
Lo strumento risulta, quindi, in grado di generare segnali differenti, anche se
parzialmente correlati, su diverse uscite.
Sono disponibili tre modalità d’operazione:
1) Il canale 1 (CH1) è la copia traslata nel tempo del canale 2 (CH2) (intervalli
di 12 ps circa ciascuno);
85
2) CH2 ha il proprio generatore statistico (per esempio spettro diverso, rumore
diverso, ecc.) ma è stimolato dal CH1(ritardato da un passo di 12 ps circa);
3) Un terzo canale dell’emulatore (con proprietà statistiche separate) genera
impulsi correlati sia per CH1 che per CH2. In questo modo solo alcuni eventi
per i due canali sono correlati. La linea di ritardo per la correlazione
temporale è termalizzata attraverso una cella Peltier per minimizzare le
variazioni termiche.
Figura 4.3: Regolazione dello sfasamento temporale tra i segnali prodotti dai due
canali. Risoluzione 11.6 ps.
Molte applicazioni richiedono l’acquisizione di eventi coincidenti tra i due canali.
L’emulatore quindi consente di generare un sottoinsieme di eventi comuni, che
condividono lo stesso spettro energetico. Vi è quindi la possibilità di programmare
le due uscite analogiche per emulare due sfondi non correlati con soltanto alcuni
eventi in comune. Solo quando la coincidenza di lettura degli eventi è abilitata (per
esempio utilizzando un DPP) si ottiene lo spettro correlato.
Figura 4.4: Generazione di eventi correlati. CH1 in rosso, CH2 in blu.
86
Figura 4.5: CHA e CHB generano uno sfondo non correlato sui due canali
d’uscita. Solo alcuni impulsi sono generati con correlazione.
Al momento la massima frequenza di generazione con una distribuzione statistica
programmabile di ritardi è 1 Mcps (millions of cycles per second). In questo caso, il
sistema genera impulsi casuali i cui sfasamenti sono distribuiti seguendo la statistica
indicata dall’operatore.
87
4.2
Sviluppo concettuale
E’ stato pensato di sviluppare l’architettura delle varie linee di ritardo in tre domini
del tempo, come mostrato in figura 4.6: clock di riferimento (rosso), CLK1 (giallo),
CLK2 (verde).
Figura 4.6: Architettura delle linee di clock.
Il segnale di start viene generato seguendo una statistica programmabile e viene
campionato dai generatori di indirizzi.
In corrispondenza di ogni segnale di start, le due memorie vengono completamente
lette e un certa quantità di delay viene programmata su ciascuna linea.
Ogni linea introduce un massimo ritardo di 1.6 ns (figura 4.7b). Quando il ritardo è
meno della metà di un periodo di clock (figura 4.7a), il generatore di indirizzi 1
genera il segnale di start in corrispondenza del fronte di salita mentre il delay
88
numero 2 genera il segnale di start in corrispondenza del fronte di discesa.
Quando il ritardo è più di mezzo periodo (figura 4.7c) i momenti di campionamento
dei due processi vengono invertiti.
Figura 4.7: Casistiche di generazione dei segnali di start a seconda del clock.
89
4.3
Implementazione hardware
E’ stata dapprima sviluppata una prima versione della scheda di prova, poi testata
mediante l’ausilio di una Spartan-3A DSP starter platform, come si può vedere in
figura
4.8.
Il sistema è stato in seguito re implementato effettuando alcune modifiche allo
stadio di uscita oltre che utilizzando un differente DAC rispetto alla versione
iniziale, migliorando così ulteriormente le prestazioni.
E’ stata prestata particolare attenzione alla simmetria tra le linee che portano il
clock verso i due DAC.
Il DAC utilizzato è un AD9726 a 16 bit con un rate di conversione fino a 400 MSPS
(Mega Samples per Second) che si è dimostrato un’ottima scelta per la sua
buonissima sincronizzazione con il segnale di clock.
Per il ritardo programmabile si è scelto un piccolo integrato della Micrel, il
SY89296U, che fornisce, per l’appunto, una delay line programmabile che ritarda il
segnale di ingresso, che nel nostro caso è un clock, utilizzando un segnale digitale
di controllo. Il segnale in ingresso è LVPECL (Low Voltage Positive EmitterCoupled Logic) e può accettare 2.5 ±5% oppure 3.5 ±10% come alimentazione,
garantito su un range di temperature che va da -40°C a +85°C.
90
Figura 4.8: Setup di prova.
Il layout è mostrato in figura 4.9.
91
Figura 4.9: Layout.
Figura 4.10: Delay line programmabile.
Figura 4.11: Schematico sezione relativa ad uno dei due DAC.
Il ritardo varia seguendo gradini discreti basati su una parola di controllo a 10 bit,
con incrementi di 10ps. C’è poi un ingresso che permette di regolare anche più
finemente il ritardo (FTUNE).
In figura 4.10 viene mostrata la parte di schematico che si occupa del comando
proprio di questi integrati.
L’uscita della delay line (denominata REF_DAC1_CLK nel caso della linea di
ritardo numero 1) va a raggiungere, come si può osservare in figura 4.11, l’ingresso
CLK+ e CLK- del DAC.
Il principio di funzionamento, di per sé molto semplice, presenta svariate
complicazioni nel momento in cui ci si trova a voler sfruttare fronti di salita di due
periodi di clock differenti, come mostrato nel paragrafo 4.2.
Per quanto concerne lo stadio finale di amplificazione si è scelto di utilizzare, nella
versione definitiva, un OpAmp a bassissimo rumore ed elevata velocità della
Analog Devices, il AD8021.
4.4
Esempi di applicazioni
Esattamente come nel caso reale, è possibile generare uno sfondo non correlato tra
il segnale captato dai due rilevatori sovrapposto a un segnale che risulta essere
correlato e rappresenta l’emissione della sorgente fisica (figura 4.12).
Figura 4.12: Emulazione dell’emissione del sodio.
96
In figura 4.13 è rappresentato un altro esempio di emulazione possibile.
Esistono diverse sperimentazioni nelle quali la discriminazione tra le particelle è
fatta attraverso le loro differenti forme d’onda. Un esempio di quanto detto è la
separazione delle particelle neutroni-gamma. L’emulatore, potendo simulare due
diversi impulsi, permette di simulare le risposte diverse dei neutroni e dei fotoni
gamma, in modo tale da eseguire delle prove senza disporre di specifiche sorgenti
radioattive.
Figura 4.13: Emissione di un neutrone.
97
Capitolo 5 : Stabilizzazione in
temperatura e validazione sperimentale
A causa della risoluzione degli sfasamenti temporali considerati, la stabilità termica
è un problema d’importanza primaria. Oltre a massimizzare la simmetria spaziale
dei due canali, prestando particolare attenzione alla lunghezza e al posizionamento
delle piste, entrambe le linee di ritardo dei segnali di clock sono state termalizzate
mediante celle di Peltier, il cui anello di controllo della temperatura è stato
digitalmente implementato mediante un microcontrollore che pilota due ponti H
separati per garantire una stabilità termica dell’ordine di 0.5°C.
Grazie proprio a questo sistema di termalizzazione implementato sul Digital
Detector Emulator è stato possibile ottenere prestazioni eccezionali.
5.1
Hardware e layout
In figura 5.1 è possibile distinguere le varie parti del controllo di temperatura:
-
PSoC (Programmable System on Chip) che realizza il vero e proprio sistema
di stabilizzazione.
-
Ponte ad H (H-Bridge) per pilotare la cella Peltier
-
Sensore di umidità e temperatura
-
Elettronica di comando delle ventole
La stabilizzazione è stata realizzata mediante una funzione di controllo PID
(Proporzionale-Integrale-Derivativo).
Si tratta di un sistema in retroazione negativa largamente utilizzato nell’industria
che, grazie ad un input che determina il valore attuale, è in grado di reagire ad un
eventuale errore positivo o negativo tendendo verso il valore 0.
98
L’utilizzo di uno PSoC per la stabilizzazione permette al sistema di essere molto
compatto ed integrare tutte le funzioni necessarie su un singolo chip (Figura 5.1).
Figura 5.1: Schema a blocchi del PSoC 3 della famiglia CY8C38.
Il ponte ad H, il cui schema a blocchi è mostrato in figura 5.2, pilota, grazie alla sua
logica di controllo e il driver integrato per il ponte stesso, la cella Peltier connessa
alla sua uscita. Questo integrato viene pilotato dal PSoC.
99
Figura 5.2: Schema a blocchi del ponte a H NCV7729 della ON Semiconductor
100
Figura 5.3: Schematico stabilizzazione in temperatura
5.2
Dati sperimentali
La validazione sperimentale si prefigge come obiettivo la verifica funzionale
dell’efficienza degli algoritmi implementati. Le sperimentazioni effettuate sono
mirate a testate il funzionamento del dispositivo principalmente su quattro ambiti
differenti di seguito elencati:
Efficienza dell’algoritmo implementato e del circuito realizzato per quanto
concerne la risoluzione;
Test sulla linearità;
Verifica della dipendenza del ritardo dalla temperatura;
Presenza di spread tra vari emulatori.
5.2.1 Risoluzione e linearità
Di seguito, nelle figure 5.4, 5.5 5.6 e 5.7, vengono rappresentati i risultati ottenuti
sperimentalmente.
Figura 5.4: Test sulla risoluzione e spettro reale confrontato con quello emulato.
Figura 5.5:Ritardo misurato sperimentalmente rispetto a quello teorico.
Figura 5.6: Risoluzione e linearità in relazione al ritardo scelto in ps.
Figura 5.7: Misura della dispersione del ritardo.
5.2.2 Dipendenza del ritardo dalla temperatura
Per quanto concerne la dipendenza del ritardo dalla temperatura, la stabilità è
garantita da variazioni mantenute al di sotto di 0.03°C a 25°C mediante il sistema a
cella Peltier descritto nel paragrafo 5.1.
E’ stato verificato sperimentalmente che da 15°C a 65°C, quando la differenza tra il
fronte di clock del DAC e quello dell’FPGA è meno di 2 ns, i DAC usati nel
dispositivo entrano in una condizione di metastabilità. Le linee di ritardo potrebbero
generare un ritardo totale (anticipo su un DAC e ritardo sull’altro) di 16 ns, mentre
il periodo di clock è di 8 ns. Dato che 4 ns sono inibiti a causa della metastabilità, ci
sono 12 ns disponibili per la regolazione fine del delay.
Questo ritardo di più di 8 ns fornisce la possibilità di emulare qualunque rotazione
di fase. Dato che il delay inserito in ogni canale risulta essere di 8 ns, appare
evidente che sia impossibile utilizzare una sola linea di ritardo, essendo il tempo di
assestamento pari a 6 ns.
Il sistema può prevenire malfunzionamenti sostanzialmente grazie alla sua
conoscenza a priori del ritardo che deve essere emulato e, sulla base di questa
conoscenza a priori, è possibile scegliere la migliore combinazione ritardo/anticipo
sui due DAC per minimizzare il rischio di metastabilità.
I dati sperimentali mostrano che su un range di circa 40°C intorno alla temperatura
ambiente di 25°C c’è un’incidenza sul ritardo del 25-30% circa, ma che con
l’ausilio del sistema di stabilizzazione l’incidenza diventa del tutto trascurabile, al
di sotto della risoluzione dello strumento.
5.3
Conclusioni e sviluppi futuri
Il Digital Detector Emulator mostra l’evidente vantaggio di poter operare in tutta
sicurezza in completa assenza di sorgenti nelle procedure di testing di sistemi di
misura per spettroscopia e in macchine per la Medicina Nucleare in acceleratori di
particelli.
Le features che distinguono il DDE rispetto a un nomale impulsatore sono:
La possibilità di generare spettri di ampiezza in modo statistico
La programmabilità delle forme e la possibilità di avere mix di differenti
forme nel medesimo canale (per emulare ad esempio gamma e neutroni)
La possibilità di generare ritardi con risoluzione nell’ordine di 10 ps tra due
canali
In particolare il lavoro di questa tesi si è focalizzato nella ricerca di un metodo per
generare ritardi analogici tra segnali correlati.
E’ stata individuata una tecnica che permette in modo semplice, economico,
affidabile e ripetibile la generazione statistica di ritardi tramite l’uso di una linea di
ritardo programmabile che introduce uno sfasamento sui clock di conversione dei
due canali.
L’obbiettivo prefissato è stato con successo raggiunto e al momento il presente
strumento è l’unica soluzione disponibile sul mercato in grado di generare due
segnali analgici che possano essere arbitrariamente ritardati.
Un ulteriore ricerca potrà portare all’implementazione di ritardi che varino
dinamicamente nel tempo secondo una statistica programmabile.
Lo strumento è al momento utilizzato nei maggiori laboratori di ricerca nazionali e
internazionali (KEK, Gran Sasso, Brookhaven National Laboratory, CERN) e
aziende leader nel settore medicali quali SIEMENS.
106
107
Bibliografia
[1] M. Merengo, La fisica in medicina nucleare, Bologna: Patron Editore, 2001.
[2] L. Pescarini e G. Gennaro, La qualità dell'immagine radiografica.
[3] H. Anger, «Sensitivity, resolution, and linearity of the scintillation camera,»
IEEE, Transaction on Nuclear Science, 1966.
[4] G. Knoll, Radiation Detection and Measurement, New York: Wiley, Third
Edition, 1999.
[5] S.
Donati,
Fotorivelatori;
seconda
edizione,
Milano:
Associazione
elettrotecnica italiana, 1997.
[6] A. Longoni e C. Fiorini, X-ray detectors and signal processing,, Politecnico di
Milano: Dipartimento di Elettronica e Informazione.
[7] Ketek,
«http://www.ketek.net/products/sdd-technology/working-principle/,»
[Online].
[8] E. Gatti e P. Rehak, «Review of semiconductor drift detectors, Nuclear
Instruments and Methods in Physics Research,» p. 47–60, 2005.
[9] W. Moses, «Overview of nuclear medical imaging instrumentation and
techniques,,» in Proceedings of the SCFIF97 Conference on Scintillating and
Fiber Detectors.
[10] W. W. Moses, «Trends in PET imaging,,» in Nuclear Instrumentation
Methods, 2001, pp. 209-214.
[11] A. Gola, L. Bombelli, C. Fiorini, T. Frizzi, G. Membretti, R. Nava e R. Peloso,
«“A Multi-channel ASIC for the Readout of the HICAM Gamma Camera”,» in
IEEE Nuclear Science Symposium Conference Record, 2008.
108
[12] M. W. Kruiskamp e D. M. W. Leenaerts, IEEE Trans. Nucl. Sci., vol. 41, n. 1,
pp. 295-298, 1994.
[13] A. F. Para, Misure e Strumentazione Nucleari, Milano: CUSL Scientific
Editions, 2004-2005.
[14] S.Pedemonte, Fast elaboration of gamma events for high resolution medical
imaging,Master thesis, DEI, Politecnico di Milano, 2009.
[15] S. M.Martinelli, Sviluppo di una gamma camera ad alta risoluzione spaziale
per medicina nucleare:metodi statistici per la ricostruzione della posizione di
interazione nel rivelatore, Master thesis., DEI, Politecnico di Milano, 2007.
[16] H. Cramer, Mathematical Methods of Statistics, Princeton University Press,
1957.
[17] G. F. Knoll, Radiation Detection and Measurement, third edition,, John Wiley
& Sons, Inc, 2000.
[18] A. Abba, Methodology and advanced elecronic architectures for high
performance digital processing, Milano, 2010.
[19] S. N. Ahmed, Physics and Engineering of Radiation Detection.
[20] S. Cova e A. Longoni, An introduction to Signals, Noise and Measurements.
[21] D. B. Thomas e W. Luk, «The LUT-SR Family of Uniform Random,» IEEE,
vol. 91, n. 4, 2013.
[22] CAEN, «http://www.detectoremulator.com/,» [Online].
[23] Xilinxs, «http://www.xilinx.com/products/silicon-devices/fpga,» [Online].
[24] S. Kilts, Advanced FPGA Design: Architecture, Implementation, and
Optimization,, 2007.
109
[25] R. Nowak, Generalized Binary Search, Madison: Department of Electrical and
Computer Engineering.University of Wisconsin.
[26] J. G. Proakis e D. G. Manolakis, Digital Signal Processing. Principles,
Algorithms, and Applications, third edition, Prentice Hall Inc.,, 1996.
[27] H. W. Johnson, High Speed Signal Propagation: Advanced Black Magic, 2003.
[28] A. Geraci, R. Abbiati e G. Ripamonti., «New signal conditioning architecture
for optimal A/D conversion in digital spectroscopy setups,» IEEE Trans. Nucl.
Sci., vol. 53, n. 3, p. 1264–1269, 2006.
[29] H.O. Anger, «Scintillation camera,» Rev. Sci. Instrum, n. 29, 27, 1958.
[30] VHDL Cookbook, «http://esd.cs.ucr.edu/vhdlcook/,» [Online].
110
Ringraziamenti
Desidero innanzi tutto ringraziare il Professor Angelo Geraci e le persone che mi
hanno assistito durante il mio percorso durato circa un anno in laboratorio,
aiutandomi ad approcciare tutti gli aspetti dell’elettronica digitale e supportandomi
in ogni momento, in particolare Andrea Abba e Francesco Caponio che ormai posso
dire di considerare cari amici e che hanno dedicato davvero molto del loro tempo
prezioso per darmi un aiuto sia tecnico che morale, sempre con il sorriso ed una
parola di conforto.
Ringrazio mio papà che ha saputo sminuire i problemi che io ingigantivo, mia
mamma che c’è sempre stata quando avevo bisogno e mio fratello per avermi
ascoltata tante volte anche riguardo agli argomenti più pedanti.
Un grazie particolare va a mia nonna Ada, per tutte le colazioni insieme e per le
infinite parole spese per consolarmi ogni volta che stavo per arrendermi, anche
grazie a lei non ho mai pensato davvero di lasciar perdere . Spero che in questo
momento abbia avuto modo di indossare il vestito che aveva comprato già tre anni
fa per questa occasione che, per i mille casi della vita, ho dovuto rimandare.
L’ultimo e più importante ringraziamento va a Giancarlo, al quale devo rendere
credito di tutto quanto sopra, ma elevato all’ennesima potenza, che sta seguendo la
mia scalata nella carriera lavorativa e che ha accompagnato ogni passo della
conclusione di questo percorso universitario e che da ormai quasi tre anni
rappresenta per me tutto quello che prima mi mancava.
111