SISTEMI DI RIFERIMENTO NON INERZIALI
EX 1
Un punto materiale di massa m è disposto sul pavimento della cabina di una
funicolare che si muove con accelerazione costante a lungo un pendio inclinato di
30°. Sapendo che il coefficiente d’attrito fra m e il pavimento è µ=0.4 calcolare
quanto può valere al massimo a affinché la massa m resti ferma durante il moto.
€
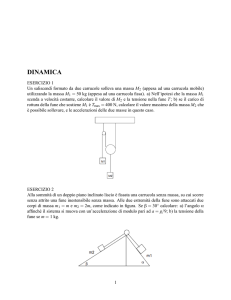
EX 2
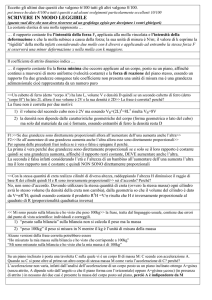
Il carrello a pareti oblique
€ descritto in figura si muove su un piano orizzontale con
accelerazione at . Determinare il minimo valore di at , affinché la massa m aderente
alla parete frontale obliqua scabra del carrello rimanga in equilibrio. (Dati θ=30°
µ=0.5)
€
€
EX 3
Una moneta di massa m=10g è collocata su un disco rotante a una distanza R=15cm
dall’asse. Siano µs=0.7 e µd=0.6 i coefficienti di attrito statico e dinamico.
Determinare la velocità angolare massima consentita: a) affinché la moneta non slitti;
b) nel caso che la moneta fosse sottoposta a una forza F1=0.1N diretta verso R; c) nel
caso la moneta fosse sottoposta a una forza F2=0.03N tangente al disco.
SOLUZIONI
EX 1
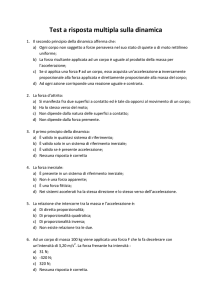
Nella figura è mostrato schematicamente la cabina della funicolare con all’interno il
corpo che stiamo considerando. Con le frecce rosse sono segnate tutte le forze in
gioco agenti sul corpo. Da notare un paio di cose. La prima è che il sistema di
riferimento in cui il corpo è fermo è un sistema non inerziale che si sta muovendo con
accelerazione a verso l’alto. Di conseguenza possiamo scrivere l’equazione della
dinamica per il corpo solo a patto di inserire anche le forze apparenti date dalla non
inerzialità del sistema. La forza apparente ha direzione coincidente con quella
€
dell’accelerazione del sistema non inerziale ma verso opposto. Inoltre è da ricordare
che la forza di attrito essendo una forza di contatto è sempre diretta lungo la direzione
della superficie su cui è appoggiato l’oggetto e in senso opposto a quello del moto. In
questo caso senza attrito l’oggetto si sposterebbe indietro rispetto al pavimento della
cabina, quindi l’attrito è diretto verso destra come indicato.
Ora avendo considerato tutti questi aspetti posso andare a scrivere la F tot = ma in cui
devo tener conto di tutte le forze presenti. Poi proietto l’equazione nelle due direzioni
scelte che in questo caso sono quella orizzontale e quella verticale perpendicolare alla
prima (sistema xy canonico). Nel sistema di riferimento scelto
€ il corpo è fermo quindi
l’accelerazione è nulla
& x) − F " cosα + Fattr = 0
R + P + Fattr + F " = 0 ⇒ '
( y) − P + R − F "senα = 0
y)R = P + F "senα
F " = ma
Fattr = µR = µ(P + F "senα ) = µ(mg + masenα )
€
L’oggetto sta fermo finchè la forza di attrito rimane minore o uguale alla forza F’
proiettata sullo stesso asse. Quando comincia a vincere l’attrito il corpo inizia a
spostarsi verso destra. Quindi:
x) F " cosα = Fattr ⇒ macos α = µ(mg + masenα ) ⇒ macosα = µmg + µmasenα ⇒ a(cosα − µsenα ) = µg
µg
0.4 * 9.8
a=
=
= 5.89m /s2
cosα − µsenα cos 30 − 0.4 * sen30
€
EX 2
In figura è mostrata schematizzata solo la parte frontale del carrello su cui poggia il
corpo sotto esame; in rosso sono segnate tutte le forze in gioco sulla massa. Come nel
caso dell’esercizio 1, il sistema di riferimento in cui il corpo è fermo è un sistema non
inerziale che si sta muovendo con accelerazione a verso destra. Di conseguenza
possiamo scrivere l’equazione della dinamica per il corpo solo a patto di inserire
anche le forze apparenti date dalla non inerzialità del sistema. La forza apparente ha
direzione coincidente con quella dell’accelerazione
del sistema non inerziale ma
€
verso opposto, quindi verso sinistra. Inoltre la forza di attrito è sempre diretta lungo
la direzione della superficie su cui è appoggiato l’oggetto e in senso opposto a quello
del moto, quindi lungo la parete obliqua del carrello. Senza la forza di attrito la massa
scivolerebbe lungo la parete obliqua verso il basso.
Nel sistema di riferimento del corpo allora si può scrivere l’equazione della dinamica
e proiettarla nelle due direzioni del sistema scelto che sono quella parallela e quella
perpendicolare al piano inclinato:
' x) − F "senθ + P cosϑ − Fattr = 0
R + P + Fattr + F " = 0 ⇒ (
) y) − Psenθ + R − F " cosθ = 0
y)R = Psenθ + F " cosθ
F " = mat
Fattr = µR = µ(Psenθ + F " cos θ ) = µ(mgsenθ + mat cos θ )
x) − F "senθ + P cos ϑ − Fattr = 0 ⇒ −mat senθ + mgcosθ − µ(mgsenθ + mat cos θ ) = 0
−mgcosθ + µmgsenθ gcosθ − µgsenθ
−mat senθ + mgcos θ − µmgsenθ − µmat cosθ = 0 ⇒ at =
=
= 6.47m /s2
−msenθ − µm cosθ
senθ + µ cos θ
€
EX 3
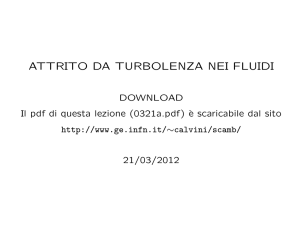
In figura è mostrata una visione dall’alto e frontale del punto a) del problema. In
rosso sono segnate tutte le forze in gioco sulla monetina. Il disco che ruota imprime
alla monetina un’accelerazione centripeta. Il sistema di riferimento in cui la moneta è
in quiete è perciò un sistema non inerziale in cui per scrivere l’equazione della
dinamica bisogna aggiungere una forza apparente che in questo caso è la forza
“centrifuga” (da cui si deduce anche già il verso della forza) che è per definizione in
verso opposto all’accelerazione che rende il sistema non inerziale. Quindi nel sistema
scelto e proiettando lungo le direzioni tangente (t) al disco, normale (n) o centripeto e
perpendicolare a entrambi (z) si ottiene:
% n) Fc" − Fattr = 0 ⇒ Fattr = Fc"
'
R + P + Fattr + Fc" = 0 ⇒ & t)0 = 0
' z)R − P = 0 ⇒ R = P = mg
(
Fattr = µR = µmg
Fc" = mω 2 R
⇒ n)µmg = mω 2 R ⇒ ω =
€
µg
0.7 * 9.8
=
= 6.76rad /s
R
0.15
Nel secondo caso b) si deve aggiungere una forza F1 diretta radialmente, come in
figura sopra. In questo caso l’equazione della dinamica diventa:
$n)Fc! − Fattr − F1 = 0 ⇒ Fattr = Fc! − F1
&
R + P + Fattr + Fc! + F1 = 0 ⇒ %t)0 = 0
& z)R − P = 0 ⇒ R = P = mg
'
Fattr = µ R = µ mg
Fc! = mω 2 R
⇒ n)µ mg = mω 2 R − F1 ⇒ ω =
µ mg + F1
0.7 * 0.01* 9.8
=
= 10.6rad / s
mR
0.01* 0.15
Nel caso c) la forza apparente centrifuga e F2 non sono dirette lungo la stessa
direzione perciò la forza di attrito affinché la monetina sia in quiete deve bilanciare la
somma vettoriale delle altre due forze, come disegnato in figura sotto.
Quindi in questo caso si ha:
R + P + Fattr + Fc! + F2 = 0
Fattr = µ R = µ mg
Fc! = mω 2 R
2
Fatt = F2 + Fc! ⇒ Fattr
= F22 + Fc!2
⇒ µ 2 m 2 g 2 = F22 + m 2ω 4 R 2 ⇒ ω =
µ 2 m 2 g 2 − F22
= 6.41rad / s
mR