ISSIA-CNR UOS di Palermo
Istituto di Studi sui Sistemi Intelligenti per l’Automazione
Via Dante, 12 90141, Palermo (Italy)
Tel. +39 091 6113513 Fax. +39 091 6113028
Rapporto Tecnico n. 419 anno 2014
Energie rinnovabili per ambito marino:
energy harvesting e MPPT
”Esemplare fuori commercio per il deposito legale agli effetti della
Legge 15 aprile 2004, n. 106”
Data di creazione
Prima distribuzione
al pubblico e deposito legale
Autori
01 aprile 2014
07 luglio 2014
Angelo Accetta, Graziella Giglia,
M.C. Di Piazza, Marcello Pucci,
Antonio Sauro, Giuseppe Scordato
Gianpaolo Vitale
C.F. 80054330586
P.I. 02118311006
Sede legale: via G. Amendola, 122/D-I 70126, Bari (Italy) Tel. +39 080 5929429 Fax. +39 080 5929460
Indice
1 Executive summary in italiano . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
2 Executive summary in inglese . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3
3 La generazione rinnovabile di energia
3.1 Pannelli fotovoltaici . . . . . . . . . .
3.2 Generatori eolici . . . . . . . . . . . .
3.3 Celle a combustibile . . . . . . . . . .
3.4 Generatori idroelettrici . . . . . . . .
3.5 Inertial Sea Wave Energy Converter .
elettrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
. . . . . . . . . . . . . . . . . . . . . . . . 5
. . . . . . . . . . . . . . . . . . . . . . . . 7
. . . . . . . . . . . . . . . . . . . . . . . . 8
. . . . . . . . . . . . . . . . . . . . . . . . 9
. . . . . . . . . . . . . . . . . . . . . . . . 10
4 L’integrazione delle RES nell’imbarcazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
5 Esempi sperimentali: MPPT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
5.1 Intelligent power conversion system management for photovoltaic generation . . 14
5.2 Growing neural gas (GNG)–based maximum power point tracking for high–
performance wind generator with an induction machine . . . . . . . . . . . . . . 18
6 Conclusioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
A Generatori commerciali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.1 Pannello fotovoltaico Solbian SP100L . . . . . . . . . . . . . . . . . . . . . . . .
A.2 Ampair 100 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.3 Rutland 913 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
23
23
24
25
Riferimenti Bibliografici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
pag. 1/26
1
Executive summary in italiano
L’energia elettrica proveniente da sorgenti rinnovabili ha il vantaggio di potere essere generata
in situ, ossia anche a bordo di ciascuna imbarcazione, senza richiedere un collegamento con
infrastrutture sulla terraferma. Per questo motivo, già allo stato dell’arte, esse sono impiegate
su alcune imbarcazioni, sebbene non siano sfruttate al meglio.
Le imbarcazioni odierne, infatti, non sono spesso dotate di un sistema elettrico in grado
di ospitare agevolmente diversi generatori elettrici che sfruttino le energie rinnovabili. Molto
spesso, questi sono utilizzati per mantenere in carica tampone gli accumulatori al piombo e solo
in determinati momenti.
Mentre si nota un interesse sempre maggiore dei costruttori nel realizzare generatori che
possano essere utilizzati in ambito marino, riducendo e.g. la rumorosità dei generatori eolici
o producendo pannelli fotovoltaici che possano adattarsi alle forme delle imbarcazioni, non si
nota alcun miglioramento affinché detti generatori possano essere armonicamente integrati fra
loro e con l’imbarcazione stessa.
In questo rapporto tecnico saranno esaminate le principali tipologie di generatori elettrici che
sfruttino le energie rinnovabili, alcune in uso, altre ancora in via di sviluppo. Si evidenzieranno
le caratteristiche che devono avere per potere essere proficuamente impiegate in ambito marino
e saranno mostrate alcune possibili soluzioni commerciali. Sarà dedicata attenzione a futuri
obiettivi della ricerca affinché le energie rinnovabili possano costituire una sempre maggiore
percentuale dell’energia installata a bordo e saranno mostrati i risultati sperimentali di alcune
innovative tecniche di controllo per la massimizzazione della potenza generata.
pag. 2/26
2
Executive summary in inglese
The electrical energy from renewable sources has the advantage of being able to be generated
in situ, i.e. on board of the ship, without requiring a connection with any infrastructure on the
mainland. For this reasons, they are already commonly used on some ship, although they are
not fully exploited.
Nowadays, electrical system on ships don’t permit an easy cooperation between various
electrical generator that operate at the same time. These are often used only to keep on trickle
charging lead batteries and not for long time.
Manufacturers have an increasing interest in producing generators that can be used on ships,
e.g. reducing the noise from wind turbines or producing solar panels that can be adapted to
the shape of the boat; but no improvement has been made to ensure that such generators can
be harmoniously integrated with each other and with the ship itself.
In this technical report, we will examine the main types of renewable energy electric generators. Features that they must have in order to be profitably employed in the marine
environment will be highlighted and some possible commercial solutions will be shown. Future
research goals will be also presented, in order to increase the renewable energy percentage of
energy installed on board. Finally, experimental results of some innovative control techniques
for maximizing the power generated will be shown and discussed.
pag. 3/26
3
La generazione rinnovabile di energia elettrica
L’utilizzo di sorgenti di energia rinnovabile (RES, Renewable Energy Source) riscuote un sempre
maggiore interesse nella comunità scientifica ed industriale, grazie anche al continuo miglioramento delle tecnologie necessarie affinché queste sorgenti di energia diventino competitive con
i più tradizionali combustibili fossili. Inoltre, l’incremento del prezzo dei combustibili fossili e
l’attenzione sempre maggiore alle problematiche di compatibilità ambientale spingono verso un
maggiore sviluppo delle sorgenti rinnovabili.
In ambito marittimo, l’utilizzo delle RES è legato strettamente all’utilizzo della propulsione ibrida, con motore a combustione interna (ICE, Internal Combustion Engine) e motore
elettrico, che, per le caratteristiche tipiche delle macchine elettriche, ha dei vantaggi sulla tradizionale propulsione con ICE. Inoltre, l’utilizzo di energie rinnovabili aggiunge un’interessante
prospettiva: l’energy harvesting. Le imbarcazioni attualmente esistenti hanno, per loro natura,
un’autonomia energetica limitata, essenzialmente legata alla capacità di stoccare e trasportare combustibile fossile. Potendo, invece, estrarre energia dall’ambiente circostante, tramite
generatori fotovoltaici, eolici, ISWEC (Inertial Sea Wave Energy Converter ), etc., l’autonomia dell’imbarcazione è conseguentemente aumentata e meno vincolata alla disponibilità di
carburante.
Le possibili applicazioni dell’energy harvesting sono molteplici.
• Droni marini. I droni marini sono utilizzati per ricognizioni scientifiche e/o militari in zone
dove l’accesso all’uomo è precluso, e.g. fondali marini, per la natura della ricerca. Infatti,
devono spesso lavorare in zone soggette a particolari vincoli ambientali o interagire con
ecosistemi fragili. Per tale motivo, i droni marini sono quasi sempre dotati di propulsione
elettrica, in quanto la possibilità di eliminare le emissioni inquinanti atmosferiche ed
acustiche consente di effettuare l’attività di ricerca minimizzando l’impatto sull’ecosistema
osservato. Si aggiunga inoltre che, per i droni sottomarini, la propulsione elettrica è di
fatto l’unica strada percorribile. Hanno però un’autonomia molto limitata, dato che la
maggior parte dello spazio a bordo, già ridotto per esigenze costruttive, è occupato per
la maggior parte da apparecchiature di rilevazione e controllo. L’utilizzo di RES a bordo
di droni marini consentirebbe dunque di aumentarne considerevolmente l’autonomia di
lavoro.
• Imbarcazioni turistiche e di servizio. Si tratta di imbarcazioni che trascorrono la maggior
parte del tempo ferme in porto, in attesa di essere utilizzate per brevi periodi di tempo, e.g. water taxi, pilotine [1]. I water taxi sono imbarcazioni, tipicamente turistiche,
utilizzate per poche ore al giorno, su tragitti per lo più brevi, ma che richiedono una
grossa potenza, dovendo coprire le distanze nel minor tempo possibile. Similmente, le
pilotine, imbarcazioni che hanno il compito di scortare le navi in uscita dal porto, sono
utilizzate per brevissimi periodi, ma devono avere motori di potenza elevata, dovendo
tenere l’andatura di navi molto più grandi. È evidente che l’utilizzo di un ICE su queste
imbarcazioni richiede un sovradimensionamento spinto, con conseguente abbassamento
del rendimento del motore, che lavorerà con cicli di carico molto discontinui. Utilizzando
invece un motore ibrido con connessione serie, il ICE potrebbe essere dimensionato per
una potenza molto minore di quella del motore elettrico, avendo a disposizione molto
tempo per la ricarica delle batterie. Conseguentemente, l’utilizzo di RES a bordo appare
pag. 4/26
particolarmente proficuo, potendosi sfruttare i tempi morti per generare energia, anche
con sorgenti rinnovabili a basso rendimento.
• Imbarcazioni di lusso. In questa tipologia di imbarcazioni, il maggiore comfort che deriva
dall’annullare o comunque ridurre fortemente il rumore prodotto dal sistema di propulsione giustifica ampiamente l’aumento di costo conseguente. I motori elettrici consentono
inoltre una maggiore manovrabilità, specie in condizioni critiche, come possono essere le
manovre all’interno dei porti; questo grazie sia al migliore controllo disponibile sui motori
elettrici, sia alla possibilità di utilizzare dei sistemi di propulsione azimutali che, eliminando il timone direzionale, consentono un controllo pressocché assoluto dell’imbarcazione.
Inoltre, a bordo di questa tipologia di imbarcazioni sono presenti numerosi carichi elettrici, e.g. lavastoviglie, lavatrice, apparati TV, etc., che incidono notevolmente sul consumo
di energia elettrica. L’applicazione delle RES ne consente una prolungata autonomia,
potendo soddisfare una consistente percentuale dei fabbisogni elettrici. Infine, la possibilità di svincolare l’alimentazione elettrica dell’imbarcazione dalle infrastrutture portuali
constituisce un indubbio valore aggiunto per questo tipo di imbarcazioni.
• Imbarcazioni militari. L’utilizzo dei motori elettrici per la propulsione marina permette, se opportunamente controllati, di ridurre le vibrazioni meccaniche, rispetto a quelle
prodotte dai motori IC o dalle turbine a gas, solitamente utilizzate nelle navi di grandi
dimensioni. Queste vibrazioni meccaniche sono amplificate dallo scafo della nave e producono una firma acustica [2], caratteristica per ogni tipologia di imbarcazione. La firma
acustica rende di fatto rintracciabili le imbarcazioni militari, pur non avendo un contatto
visivo diretto, dato che il segnale acustico si propaga facilmente attarverso l’acqua. La
propulsione elettrica, eliminando a almeno riducendo la firma acustica dell’imbarcazione,
ne rende più difficile l’identificazione. Inoltre, le imbarcazioni militari hanno cicli di utilizzo che richiedono bassa potenza per lunghi periodi di tempo, che ben si prestano ad
essere soddisfatti con un sistema di propulsione elettrica ausiliario, potendo disporre dell’energia elettrica normalmente utilizzata per il riscaldamento della nave. Le imbarcazioni
militari, infine, dispongono di uno spazio a bordo più esteso rispetto alle imbarcazioni precedentemente esaminate; ciò consente di installare un maggior numero di generatori che
utilizzino le RES, ottenendo di conseguenza una potenza elettrica installata proporzionalmente maggiore e capace dunque di soddisfare una buona parte delle esigenze di carico
di tali imbarcazioni.
3.1
Pannelli fotovoltaici
Allo stato dell’arte, molte imbarcazioni, spesso a vela, utilizzano pannelli fotovoltaici per caricare le batterie a bordo durante le soste nei porti o durante la navigazione a vela. Si evidenzia
tuttavia come sia la qualità sia la quantità dell’energia elettrica prodotta sia spesso insufficiente
[3]. La causa di ciò è però da ricercarsi nella limitata presenza di apparecchi di regolazione
DC/DC che permettono un adeguato accoppiamento fra batterie e pannelli.
Le caratteristiche che rendono un pannello fotovoltaico particolarmente adatto all’utilizzo
marino sono: la leggerezza, la calpestabilità e la resistenza agli agenti atmosferici e alla salsedine.
Infatti, a bordo di un’imbarcazione, non sono disponibili grandi superfici piane, che si prestano
all’installazione di pannelli fotovoltaici per uso domestico; è preferibile che l’installazione dei
pag. 5/26
pannelli fotovoltaici non riduca sensibilmente lo spazio calpestabile a bordo, in quanto, e.g. in
caso di manutenzione, deve essere possibile accedere alle aree coperte dai pannelli.
I pannelli fotovoltaici possono essere composti da:
• silicio monocristallino: per questi pannelli si utilizza silicio puro, esente da difetti,
costituito da un singolo cristallo continuo, senza cioè i cosiddetti “bordi di grano”. La
struttura atomica del silicio monocristallino è ovviamente rigida e non si presta ad essere
modellata su superfici curve. I pannelli fotovoltaici realizzati con questo materiale hanno
un rendimento medio che si aggira intorno al 16%-17%. Recentemente, grazie allo sviluppo
della tecnologia “back contact” per la realizzazione delle celle solari, il rendimento dei
pannelli può aumentare fino al 23%. I wafer di silicio sono trattati con una soluzione
caustica per creare una superficie tassellata, composta da milioni di piccole piramidi a
base quadrata, capaci di catturare la maggior parte della radiazione solare incidente. I
pannelli sono realizzati incapsulando vari wafer, elettricamente connessi fra loro in serie
ed in parallelo, fra due strati di etilene vinil acetato e vetro di protezione. Hanno un
costo elevato, sia per la qualità del materiale sia perché, essendo il silicio monocristallino
prodotto in lingotti cilindrici, hanno una maggiore difficoltà costruttiva. È da notare
che alcuni costruttori propongono pannelli fotovoltaici in silicio monocristallino flessibili,
grazie all’utilizzo di un supporto in tecnopolimeri plastici ad elevata resilienza; questi
pannelli consentono una curvature con freccia massima del 25%.
• Silicio policristallino: allo stato attuale è il materiale maggiormente utilizzato per la
costruzione dei pannelli solari; non essendo costituito da un unico cristallo di silicio, i pannelli fotovoltaici ottenuti a partire da questo materiale hanno un rendimento lievemente
inferiore (15%-16%), ma le modalità di produzione sono notevolmente semplificate. Inoltre, il silicio policristallino esibisce un migliore comportamento ai bassi valori di incidenza
della luce solare, rispetto ai pannelli in silicio monocristallino [3].
• Silicio amorfo: è una forma allotropica, non cristallina, del silicio; a differenza delle
forme cristalline, lo si può ottenere per deposizione di un film sottile su di un substrato
vetroso o plastico, anziché a partire da lingotti cristallini di silicio. Ha prestazioni elettriche notevolmente peggiori, rispetto alle forme cristalline, ma questo difetto è compensato
dalla maggiore semplicità di produzione. Inoltre, consente la produzione di celle solari flessibili, che si possono adattare anche a superfici irregolari, a differenza delle forme
cristalline che permettono di realizzare solo pannelli piani. Un recente sviluppo della
tecnologia dei pannelli fotovoltaici in silicio amorfo è la cosiddetta tripla giunzione: la
singola cella solare è realizzata dalla giunzione di tre sottocelle sovrapposte, ciascuna sensibile ad una delle tre componenti primarie della luce solare (rossa, verde, blu). Questa
suddivisione dello spettro luminoso, ed in particolare la capacità di assorbire la luce blu,
permettono al pannello fotovoltaico di produrre energia anche con luce diffusa e bassi
livelli di insolazione.
Il posizionamento dei pannelli solari per uso marino è strettamente legato alla struttura
dell’imbarcazione e allo spazio libero. È fondamentale che i pannelli non siano ombreggiati,
pena il malfunzionamento degli stessi, e dovrebbero essere orientati verso il sole ad un’angolazione ottimale, stabilita dal costruttore. Ovviamente, su di un’imbarcazione non è sempre
possibile soddisfare queste esigenze, esistono tuttavia alcune soluzioni di montaggio attualmente
utilizzate che costituiscono un buon compromesso[3].
pag. 6/26
• Coach House: i pannelli montati sul tetto della coach house possono offrire buone
prestazioni, anche se, nelle barche a vela, alcuni di loro saranno ombreggiati dalle vele.
• Specchio di poppa: solitamente si installa un singolo pannello, con la possibilità di
regolare l’angolo d’inclinazione , i cui supporti sono saldati alla ringhiera di poppa.
• Arco di poppa: l’arco di poppa, se presente, è libero da ombreggiature e consente
l’installazione di un certo numero di pannelli fotovoltaici, in genere due.
• Ringhiera di poppa: alcuni pannelli possono essere montati, a mezzo di supporti regolabili, sulle ringhiere di poppa; in questo modo i pannelli non attivi possono essere
ripiegati in modo da non occupare spazio.
• Multiscafo: nel caso di imbarcazioni multiscafo, la maggiore presenza di superfici piatte
rende più semplice l’installazione di pannelli fotovoltaici. È quindi possibile utilizzare il
tetto della coach house, solitamente di dimensioni maggiori rispetto ad un’imbarcazione
monoscafo, o gli scafi esterni, nel caso di trimarani, che possiedono il vantaggio aggiuntivo
di essere in genere liberi da ombreggiature.
3.2
Generatori eolici
I generatori eolici sono la seconda RES più utilizzata in ambito marino[3]; ciononostante, bisogna tenere in considerazione alcuni fattori per potere valutare l’effettiva efficacia di questa RES,
in genere legati alle rotte che si prevedono per l’imbarcazione. Infatti, alcune zone sono più
produttive per la generazione di energia elettrica tramite generatori eolici, e.g. nelle zone caraibiche i generatori eolici possono essere proficuamente utilizzati, mentre nel mar Mediterraneo
i pannelli fotovoltaici offrono una maggiore produttività. La navigazione sottovento, inoltre,
riduce la produttività, dato che la velocità apparente del vento è ridotta. I generatori, infine,
offrono i migliori risultati quando l’imbarcazione è all’ancora, a meno che ovviamente il punto
di ancoraggio non sia in un luogo riparato dal vento.
Sono attualmente in commercio diversi modelli di generatori eolici per imbarcazioni, dotati solitamente di generatori a magneti permanenti (PMSG, Permanent Magnet Synchronous
Generator ), monofasi o trifasi, accoppiati con un raddrizzatore a diodi. Il numero di pale è
variabile, da un minimo di due fino ad un massimo di sei pale. In Tabella 1 sono riportati i
dati di alcuni fra i modelli più utilizzati.
La scelta del luogo di installazione di un generatore eolico dipende principalmente dalla disponibilità dell’imbarcazione. Principalmente sono installati nello specchio di poppa, in modo
tale che le pale del generatore siano ben distanti dalla zone dell’imbarcazione destinata all’equipaggio. Lo svantaggio principale consiste nel dover rafforzare gli agganci del generatore anche
alla ringhiera di poppa, considerando che durante il normale funzionamento, specie con vento
veloce, il generatore produce fastidiose vibrazioni che possono lederne la stabilità. Dette vibrazioni si propagano però attraverso la ringhiera di poppa e possono diminuire il comfort acustico
dell’equipaggio. Una soluzione comunemente impiegata consiste nel rinforzare gli agganci con
anelli di gomma che ammortizzano il propagarsi delle vibrazioni. Alcuni costruttori, inoltre,
adottano particolari profili per le pale, in modo da attenuarne la rumorosità e incrementarne
la resistenza alle vibrazioni.
pag. 7/26
Tabella 1: Dati di targa di alcuni generatori eolici per imbarcazioni[3]
model
Aerogen 3
Rutlan 910
LVM 50
Ampair 100
Fourwind III
Windbugger
3.3
output current (A)
1
2
3
6
10
2
3
5
6
8
0,5
1
2
7
1
3
5,5
4
7
12
4
8
13
wind speed (nodi)
10
13
18
25
35
15
18
27
35
45
7
11
24
34
10
15
25
10
15
25
10
15
25
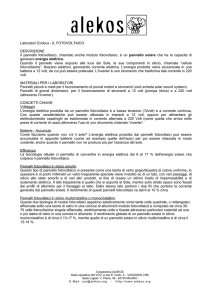
Celle a combustibile
Le celle a combustibile (FCS, Fuel Cell Systems) sono dispositivi elettrochimici che convertono
l’energia chimica di un carburante gassoso in energia elettrica e che possono essere utilizzate
come una potenziale alternativa alle sorgenti di energia statiche e portatili. Esse costituiscono
un’efficace alternativa ai ICE e riducendo la dipendenza dai combustibili fossili; hanno perciò
profonde ripercussioni in materia di protezione dell’ambiente[4].
I FCS hanno subito in questi ultimi anni un intenso sviluppo, condotto parallelamente da
diversi produttori, in special modo per quanto riguarda le celle a combustibile con Membrana
a Elettrolita Polimerico, anche detta Membrana a Scambio protonico, (PEM, Polymeric Electrolyte Membrane o Proton Exchange Membrane) che sono considerate da molti in uno stadio
di sviluppo più avanzato per quanto riguarda le applicazioni di trazione elettrica.
Le celle a combustibile di tipo PEM hanno un’alta densità di potenza, un elettrolita solido,
una maggiore durata della cella, nonché bassa corrosione. Hanno inoltre un’efficienza maggiore,
se paragonate ai motori a combustione interna; infatti, una cella a combustibile ha un rendimento del 40% circa, mentre un motore Diesel ha un rendimento massimo del 25%. Stante
questi risultati, è possibile immaginare un promettente sviluppo nel campo della generazione
modulare di energia e della propulsione con energia elettrica. L’utilizzo dell’idrogeno puro come
combustibile permette di eliminare le emissioni locali di gas di scarico, con evidenti vantaggi,
pag. 8/26
specie per la circolazione in zone protette.
La cella a combustibile consiste di un elettrolita posto fra due elettrodi. L’elettrolita ha
particolari proprietà che consentono il passaggio di ioni positivi di idrogeno, mentre gli elettroni
sono bloccati. L’idrogeno gassoso passa attraverso un elettrodo, l’anodo, e, mediante l’aiuto di
un catalizzatore, è separato in elettroni e protoni, secondo la seguente reazione chimica[4]:
2H2 → 4H + + 4e−
I protoni attraversano la membrana, fino a raggiungere l’altro elettrodo, il catodo, mentre gli
elettroni scorrono in un circuito esterno, creando una corrente elettrica. Infine, i protoni e gli
elettroni si combinano con l’ossigeno che scorre attraverso il catodo, per produrre acqua:
O2 + 4H + + 4e− → 2H2 0
per cui si ha in definitiva che:
2H2 + O2 → 2H2 O + energia
La tensione prodotta da una cella ha un valore compreso fra 0 e 1 V , a seconda del punto
di lavoro e del carico elettrico collegato; il valore tipico della tensione erogata varia fra 0,5 e
0, 8 V [5]. Per ottenere valori maggiori di tensione è necessario collegare in serie più celle, per
cui la tensione totale è pari al prodotto della tensione media per il numero di celle. Come tutti
gli apparecchi elettrici, anche le celle a combustibile hanno delle resistenze parassite, a causa
delle quali una quota parte della potenza generata è dissipata in calore.
Allo stato attuale, la vita media delle celle a combustibile è limitata; e.g. il sistema sperimentale NexaTM Power Module ha una durata utile limitata a 1500 ore[6]. Più in generale,
la vita massima di una cella a combustibile è oggigiorno inferiore a 5000 ore, ma tale valore
è profondamente influenzato dalle condizioni di funzionamento della cella stessa; per questo
motivo, una cella a combustibile sottoposta a cicli di funzionamento reali avrà una vita utile
probabilmente inferiore.
3.4
Generatori idroelettrici
L’impiego di generatori idroelettrici a bordo di un’imbarcazione può presentarsi sotto diversi
aspetti:
• alternatore “classico”: in perfetta analogia alla controparte terrestre, una soluzione
comunemente accettata nelle barche a vela è l’installazione di un alternatore collegato
all’albero di propulsione. Tale scelta consente la generazione di energia elettrica sia aggiungendo un ulteriore carico meccanico al ICE di propulsione, sia, durante la navigazione
a vela, sfruttando l’azione della corrente sull’elica. In entrambi i casi, la generazione di
energia elettrica avviene a scapito di un rallentamento dell’imbarcazione, stimata fino a
mezzo nodo per le imbarcazioni a vela più leggere. La possibilità di utilizzare tale tipo di
generazione dipende, infine, da quanto tempo può essere dedicato alla navigazione a vela.
• sistemi turbina-generatore: questi sistemi si presentano in due varianti, trainate e
sommerse. I sistemi trainati sono dotati di un alternatore per basse velocità, meccanicamente collegato tramite una fune ad una turbina idraulica, trainata fuoribordo dall’imbarcazione. Il sistema converte parte dell’energia meccanica del sistema di propulsione in
pag. 9/26
energia elettrica, a spese ovviamente della velocità dell’imbarcazione (fino a mezzo nodo
di rallentamento). I maggiori problemi che derivano dall’utilizzo di questi sistemi sono
l’inefficenza alle alte velocità, in quanto la turbina tende a rimbalzare sull’acqua se la velocità di trascinamento è superiore a 6 nodi, e il rischio che possa essere scambiata come
preda da alcuni esemplari della fauna marina. Il primo problema può essere parzialmente
risolto zavorrando la turbina, aumentando la lunghezza del traino o incrementando il diametro della fune. Nella variante sommersa, l’alternatore e la turbina sono collegati sullo
stesso albero, quindi collegati all’estremità di un palo che ne consente il posizionamento
subacqueo. L’alternatore deve essere tale da consentire il funzionamento in immersione
ed il sistema deve essere dunque a tenuta stagna. Il corpo dell’alternatore è solitamente
immerso in olio isolante, per contrastare la pressione esterna.
3.5
Inertial Sea Wave Energy Converter
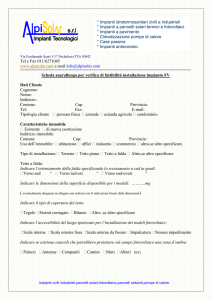
L’Inertial Sea Wave Energy Converter (ISWEC) è un dispositivo in grado di convertire, tramite
fenomeni giroscopici, l’energia meccanica del moto ondoso in energia elettrica. Il dispositivo è
ancora in una fase sperimentale ed un prototipo è stato realizzato e verificato in condizioni di
laboratorio presso il Dipartimento di Idraulica del Politecnico di Torino [7].
Il dispositivo ISWEC è composto da un galleggiante monolitico al cui interno opera un
generatore elettrico giroscopio. Il giroscopio è costituito da un volano e da una sospensione che
permette sia la rotazione φ del volano attorno al suo asse (moto detto di rotazione propria)
sia la precessione attorno a un asse orizzontale ortogonale a φ. Allineando il sistema verso la
direzione dell’onda, sull’asse di precessione si genera una coppia giroscopica nata dalla combinazione del moto di beccheggio del galleggiante δ e dalla velocità del giroscopio φ. Ponendo un
generatore elettrico sull’asse è possibile utilizzare la coppia giroscopica per produrre energia.
Figura 1: Schema costruttivo dell’ISWEC
L’architettura dell’ISWEC presenta la caratteristica di avere tutte le parti in movimento relativo e necessarie alla generazione di potenza contenute all’interno dello scafo e quindi
protette dall’acqua e dall’atmosfera salina. Questo, unito ad altri vantaggi, quali lo scafo monolitico maggiormente resistente alle condizioni marine estreme e l’economico ancoraggio al
fondale, fanno del dispositivo ISWEC un sistema avente i presupposti per un’elevata durata ed
economicità di esercizio.
pag. 10/26
Un prototipo in scala 1:45 è stato progettato e realizzato presso il Politecnico di Torino ed è
stato provato a secco su un banco di simulazione d’onda per valutarne le prestazioni. Il sistema,
durante i test, è stato in grado di assorbire 2,22 W a fronte dell’onda nominale a 1 Hz e 2◦ di
ampiezza di beccheggio del galleggiante.
È evidente che il sistema è ancora in una fase embrionale di sperimentazione, ma la stadio di avanzamento è sufficiente per potere intravedere una proficua applicazione dell’ISWEC
nell’ambito dell’energy harvesting per le imbarcazioni.
pag. 11/26
4
L’integrazione delle RES nell’imbarcazione
La tendenza attuale per l’utilizzo delle RES in ambito marino è di considerare l’energia elettrica
generata come un saltuario appoggio per la ricarica delle batterie, da utilizzare quindi solo
saltuariamente. Inoltre, raramente un’imbarcazione utilizza contemporaneamente più sorgenti
di quelle sopra elencate. Le ragioni di ciò sono da ricercarsi nella difficoltà di coordinare i
flussi di energia provenienti da diverse sorgenti e nella mancanza di un’adeguata tecnologia per
la gestione delle RES. I prodotti che si trovano usualmente in commercio non sono quasi mai
dotati di un’elettronica di controllo, e questo impedisce di sfruttarli correttamente ed estrarre
tutta l’energia elettrica disponibile.
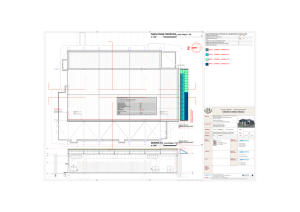
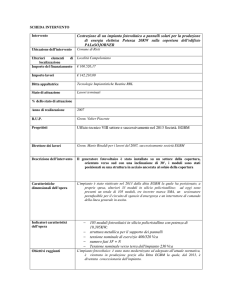
In Figura 2 è riportato lo schema di principio proposto per una completa integrazione delle
RES; la propulsione dell’imbarcazione è esclusivamente elettrica e l’energia elettrica necessaria
al funzionamento dei motori elettrici, nonché della strumentazione di bordo, proviene sia da
fonti rinnovabili sia, tramite un gruppo elettrogeno, da combustibili fossili.
mechanical
energy
C, ω
ICE
electrical energy
mechanical
energy
3φ
DC
3φ
Iabc , Vabc
IDC , VDC
Iabc , Vabc
3φ
PMSG
AC
DC
DC
AC
C, ω
3φ
PMSM
DC
DC
from RES, storage
Figura 2: Schema di principio dell’imbarcazione elettrica
La presenza di un DC link consente una più semplice integrazione delle varie RES all’interno
dell’imbarcazione: l’energia prodotta, anziché essere utilizzata esclusivamente per la carica delle
batterie, può essere utilizzata anche per l’alimentazione dei motori di propulsione e dei servizi
di bordo; il vantaggio immediatamente conseguente è che le RES possono essere sfruttate senza
soluzione di continuità, invece di limitarne l’utilizzo a certi periodi, che possono non essere
quelli più favorevoli.
L’utilizzo di un motore elettrico per la propulsione, oltre a comportare innegabili vantaggi
pag. 12/26
in termini di manovrabilità, consente di utilizzare la stessa macchina anche per la rigenerazione
di energia secondo le modalità esposte nella Sezione 3.4. La disponibilità di eliche a pale regolabili elettronicamente consente di poter modificare il profilo dell’elica a seconda delle esigenze:
generazione elettrica o propulsione.
Tuttavia, la reale integrazione delle RES nelle imbarcazioni può essere ottenuta solo implementando un adeguato controllo delle stesse; infatti, come è già stato accennato nelle Sezioni
precedenti, i generatori che sfruttano le RES si trovano spesso a dovere gestire potenze elettriche
molto basse, ed è dunque evidente che senza un adeguato controllo il rischio di predere tutta l’energia disponibile è tutt’altro che remoto. A tale proposito, i generatori eolici costituiscono un
valido esempio; spesso i costruttori pongono infatti l’accento sulla potenza massima generata,
che però viene raggiunta solo con venti di 25-30 nodi, una condizione che raramente è raggiunta
nel bacino mediterraneo, mentre con valori di velocità del vento più ridotti la potenza generata
è drasticamente inferiore, spesso nulla a causa delle perdite per effetto Joule. Un adeguato
controllo del punto di massima potenza (MPPT, Maximum Power Point Tracking), sebbene
non possa aumentare magicamente la potenza disponibile, può assicurare lo sfruttamento di
tutta l’energia che la RES può erogare in quel determinato istante.
Nella Sezione seguente sono riportati alcuni esempi sperimentali ([8], [9]) dell’applicazione
del controllo MPPT sia ai pannelli fotovoltaici sia ai generatori eolici, per confermare come
questa metodologia di controllo possa incrementare le prestazioni dei generatori a RES.
pag. 13/26
5
5.1
Esempi sperimentali: MPPT
Intelligent power conversion system management for photovoltaic generation
Il sistema di controllo del MPPT proposto si basa sulla stima on-line del valore di radianza
solare ottenuta tramite una rete neurale Growing Neural Gas (GNG).
Il sistema fotovoltaico è composto da un convertitore boost DC/DC, che effettua lo MPPT,
e da un raddrizzatore monofase attivo, controllato tramite un algoritmo VOC per la connessione
alla rete. Ogni componente del sistema è controllato in coordinazione con gli altri, in accordo
ad una strategia generale.
Il sistema fotovoltaico è stato verificato sperimentalmente in laboratorio. La sorgente fotovoltaica è stata simulata a mezzo di un convertitore di potenza, in grado di riprodurre tutte le
condizioni operative di un pannello fotovoltaico commerciale, inclusa l’ombreggiatura parziale.
Il confronto fra l’approccio proposto e la tecnica classica di Perturba e Osserva (P&O),
effetuato su di un profilo di radianza solare reale, ha mostrato un incremento della potenza
generata del 13%. Inoltre, lo MPPT basato sulla GNG ha dimostrato di essere un controllo
più robusto del P&O nelle condizioni di ombreggiatura parziale. Lo svantaggio principale
derivante dall’utilizzo della GNG è la necessità di conoscere un set di caratteristiche del pannello
fotovoltaico, basato su di un modello matematico o dei dati empirici, per l’addestramento della
rete neurale.
L’emulatore fotovoltaico Il sistema fotovoltaico emulato consiste di due stringhe in parallelo, costituita ciascuna da sei moduli collegati in serie. L’emulatore riproduce le caratteristiche
I − V del generatore reale, secondo una logica modulare: la caratteristica elettrica globale del
sistema è ottenuta come somma delle caratteristiche dei singoli moduli, tenendo conto del valore
di irraggiamento solare su ciascuno di essi. In questo modo si può tenere conto sia di condizioni
di ombreggiatura parziale, sia di condizioni di illuminamento uniforme. L’emulatore è stato
realizzato con un convertitore buck DC/DC, con frequenza di switching costante, controllato
in modo da avere conduzione continua e ripple sulla tensione in uscita prefissato. Il riferimento
di tensione è quello ottenuto tramite il modello analitico modulare del sistema fotovoltaico.
Il convertitore boost Il convertitore boost DC/DC connette l’emulatore del pannello fotovoltaico con il raddrizzatore monofase, per l’immissione in rete dell’energia. Anche in questo
caso, il dimensionamento del convertitore è stato effettuato imponendo la conduzione continua
e fissando il limite superiore del ripple della tensione di uscita. La variabile di controllo del
convertitore è la tensione in ingresso: supponendo che il raddrizzatore attivo sia in grado di
mantenere costante la tensione del DC link, è possibile controllare la tensione in ingresso al
convertitore boost, e quindi la tensione in uscita al pannello fotovoltaico, in modo da imporre
il punto di lavoro al MPP.
MPPT GNG-based La rete neurale GNG si comporta come fosse un solarimetro virtuale,
stimando sulla base dei parametri elettrici disponibili quale sia il valore di radiazione solare
che incide sul pannello e potendo cosı̀ ottenere la tensione in uscita dal pannello corrispondente
al MPP. La rete neurale GNG è una rete non supervisionata che aggiunge man mano nuovi
pag. 14/26
neuroni ad una struttura inizialmente piccola; in questo modo, la topologia della rete ha una
dimensione che dipende dai dati in ingresso e può variare localmente. Conoscendo il modello
analitico del pannello fotovoltaico, o in alternativa sulla base di dati misurati sperimentalmente,
è possibile far si ché la GNG apprenda la funzione VP V = f (IP V , G), essendo VP V la tensione
in uscita dal pannello fotovoltaico, IP V la corrente in uscita e G il valore di radiazione solare
incidente. Terminata la fase di apprendimento, in cui la rete aggiunge neuroni fino a ricoprire
ottimamente i dati in ingresso, è possibile utilizzare la fase di produzione della GNG, in cui si
ottiene G = f (IP V , VP V ).
Risultati sperimentali Il sistema è stato verificato sperimentalmente con una variazione
di irraggiamento solare da un valore iniziale G0 = 550 W/m2 , particolarmente critico per il
boost converter per il basso valore di tensione in unscita dal pannello, ad un valore finale G1 =
850 W/m2 . Il controllo è stato in grado di impostare correttamente il punto di funzionamento
al MPP; è stato inoltre effettuato un confronto con une metodologia di controllo P&O per
verificare l’incremento di prestazioni del sistema.
Figura 3: Andamento dell’irraggiamento solare G stimato
In Figura 3 è riportato l’andamento dell’irraggiamento stimato dalla GNG, mentre in Figura 4 sono riportati i corrispondenti andamenti delle grandezze elettriche del pannello fotovoltaico: si può notare, com’era atteso, un aumento della corrente in uscita ed una diminuzione della
tensione. È evidente dalla Figura 3 che il transitorio dovuto alla variazione di irraggiamento
solare, che deve essere stimata dalla GNG, ha una durata circa pari a 5 s; questa durata, che
in generale potrebbe essere considerata eccessiva, è pari al tempo necessario alla convergenze
dell’algoritmo di controllo del DC/DC boost, e dipende principalmente dalla capacità di disaccoppiamento fra il boost converter e il pannello fotovoltaico, non dalla rete neurale. Tale
capacità è necessaria per filtrare le variazioni di corrente e tensione generate dal boost converter
e, come conseguenza, la risposta in tensione del pannello è notevolmente più lenta della risposta
in corrente.
pag. 15/26
Figura 4: Grandezze elettriche in uscita dal pannello fotovoltaico
Il controllo MPPT GNG-based è stato inoltre confrontato con una metodologia più classica
di P&O. Per semplicità è stato utilizzato un algoritmo MPPT a passo fisso; dato che il boost
converter DC/DC è controllato a catena chiusa nella tensione in ingresso VP V , l’algoritmo P&O
genera delle variazioni nella tensione di riferimento ∆VP V,ref per valutare le corrispondenti
variazioni di potenza in uscita ∆PP V e trovare il MPP. Il passo fisso, ossia il valore di ∆VP V,ref ,
è stato scelto in modo da ottenere un buon compromesso fra velocità di convergenza (∆VP V,ref
maggiore) e piccole oscillazioni attorno al MPP (∆VP V,ref minore). Entrambi gli algoritmi sono
stati verificati sulla base di un profilo giornaliero, misurato a Palermo fra le 8.30 e le 15.30, di
illuminamento solare.
(a) potenza generata
(b) energia generata
Figura 5: Confronto tra GNG e P&O
In Figura 5 sono riportati gli andamenti della potenza e dell’energia elettrica prodotti: si
pag. 16/26
può notare come la potenza elettrica generata con il controllo GNG sia sempre superiore a
quella ottenuta con sistema controllato tramite P&O, e che ciò si traduca in un incremento del
13% nell’energia generata all fine del ciclo produttivo.
Figura 6: Caratteristica elettrica con ombreggiatura parziale
Un altro beneficio che il controllo GNG-based offre rispetto al controllo P&O è la corretta
gestione dell’ombreggiatura parziale del pannello. In Figura 6 è riportata la caratteristica
elettrica del pannello in esame nel caso in cui vi siano due moduli irradiati con un valore
Ga = 650 W/m2 , due moduli con irradiamento Gb = 850 W/m2 ed i restanti due moduli
con Gc = 1050 W/m2 ; nella stessa Figura è anche riportata la caratteristica con irradiamento
uniforme e pari a Gc . Si può notare come la caratteristica con ombreggiatura mostri 2 massimi
locali (punti b, d) ed un massimo assoluto (punto f ). Sono stati scelti diversi punti di partenza
di lavoro del sistema (punti a, c, g) e sono stati ottenuti i seguenti risultati: l’algoritmo di
controllo GNG-based riesce correttamente ad identificare il MPP a prescindere da quale sia il
punto di lavoro di partenza del sistema, ed il punto d lavoro finale risulta essere il punto e. Al
contrario l’algoritmo P&O riesce ad identificare il MPP solo se il punto di partenza è il punto g,
in tutti gli altri casi non riesce ad indentificare il MPP e la potenza erogata è conseguentemente
minore.
Il sistema di controllo, composto dalla rete neurale GNG, dal controllo fuzzy del boost
converter, e dal controllo VOC del raddrizzatore attivo sono stati implementati su di una
scheda FPGA EP3C25F324C8 Cyclone III, il cui costo si aggira sui 150$. È una piattaforma
abbastanza comune, che si adatta molto bene all’utilizzo della GNG, dato che consente di
realizzare reti combinatorie in cui i calcoli sono svolti in parallelo. Rappresenta inoltre lo stato
dell’arte per l’implementazione degli algoritmi P&O. Consente infine di aggiornare l’algoritmo,
laddove soluzioni basata su circuiti analogico-digitali, sebbene più economiche, non consentono
un facile aggiornamento del sistema. É comunque da notare come il costo della scheda sia una
frazione del costo dell’impianto fotovoltaico, e comunque in linea con i regolatori di tensione
pag. 17/26
che devono essere necessariamente acquistati per l’utilizzo dei pannelli fotovoltaici in ambito
marino.
5.2
Growing neural gas (GNG)–based maximum power point tracking for high–performance wind generator with an induction
machine
Il controllo MPPT GNG-based può essere utilizzato con profitto anche per il controllo dei generatori eolici asincroni. La rete neurale può essere addestrata in modo che i neuroni ricoprano la
superficie dei punti di coppia corrispondenti a valori di vento e velocità di rotazione, ottenendo
dunque la funzione T = f (vw , ωr ). La rete neurale in fase di produzione consente di invertire questa funzione, trasformandosi in un anemometro virtuale e stimando dunque la velocità
del vento sulla base della velocità di rotazione e della coppia motrice applicata al generatore
asincrono. Sulla base di questa informazione, si impone il riferimento di velocità di rotazione
ottimale corrispondente al MPP. L’algoritmo di controllo GNG-based è stato verificato sperimentalmente, grazie all’utilizzo di una turbina eolica emulata tramite un motore sincrono a
magneti permanenti, con una configurazione back-to-back, per l’immissione in rete dell’energia
elettrica prodotta, e confrontato con un algoritmo di controllo P&O.
Il raddrizzatore lato macchina La turbina eolica genera una coppia motrice che varia
rapidamente, in funzione della velocità del vento; per questo motivo, è opportuno adottare uno
schema di controllo orientato al flusso (FOC, Field Oriented Control ) nel sistema di riferimento
del flusso di rotore, in modo da garantire elevate prestazioni dinamiche del generatore. Il
raddrizzatore lato macchina permette dunque il controllo separato delle correnti secondo i due
assi del sistema di riferimento, in modo da poter controllare separatmente flusso e velocità
di rotazione del generatore; in particolare, sono presenti due anelli di controllo (corrente e
tensione), per ciascuna grandezza controllata.
L’inverter lato rete Il controllo dell’inverter lato rete è realizzato con tecniche orientate alla
tensione (VOC, Voltage Oriented Control ); questa tecnica, parallelamente alla metodologia
FOC, consente in controllo separato dei flussi di energia attiva e reattiva. La variabile di
controllo è la tensione del DC-link, impostata ad un valore costante, che fornisce il riferimento
di corrente secondo l’asse diretto, mentre il riferimento di corrente secondo l’asse in quadratura
è imposto a zero, in modo da annullare lo scambio di energia reattiva con la rete.
L’emulatore della turbina eolica Per la verifica sperimentale dell’algoritmo di controllo, è
stato utilizzato un emulatore di turbina eolica; detto emulatore è stato realizzato con un motore
sincrono a magneti permanenti (PMSM, Permanent Magnet Synchronous Motor ), controllato
in coppia con un algoritmo FOC. Dati i parametri costruttivi della turbina eolica, la coppia Tw
che deve essere erogata dal PMSM è ottenuta come:
Tw =
Pm
ρR3 2
= Cw (λ, β)
v
ωw
2 w
pag. 18/26
essendo Pm la potenza meccanica erogata dalla turbina, ωw la velocità di rotazione, λ è il
rapporto di velocità di pala, β è l’angolo di pala, ρ è la densità dell’aria, R è il raggio della
turbina ed infine vw è la velocità del vento.
Risultati sperimentali Il controllo GNG-based è stato verificato con un test composto da
rapide variazioni della velocità del vento; sono state scelte variazioneı̀i rapide in quanto consentono di verificare la bontà dell’algoritmo in condizioni più gravose, essendo normalmente le
variazioni di velocità del vento molto più graduali. In Figura 7 sono riportati gli andamenti
della velocità del vento reale (emulato) e stimato dalla rete GNG: si può osservare come la velocità del vento stimat riesca a seguire in maniera ottimale l’andamento emulato della velocità
del vento.
Figura 7: Velocità del vento reale e stimata
In Figura 8 sono riportate le caratteristiche meccaniche statiche del generatore asincrono
per diversi valori di velocità del vento, insieme con la curva che descrive il luogo dei MPPs.
In rosso è tracciato anche il luogo dinamico dei punti di lavoro del sistema, dimostrando come
l’algoritmo GNG sia in grado di identificare il MPP anche per piccole variazioni di velocità del
vento.
Anche in questo caso è stato effettuato un confronto con la tecnica MPPT P&O: le variazioni esaminate dall’algoritmo sono quelle di potenza attiva scambiate con la rete; il passo
dell’algoritmo è stato scelto fisso e pari ad un valore che costituisce un buon compromesso
fra velocità di convergenza e oscillazioni del punto di lavoro attorno il MPP. I due algoritmi
MPPT sono stati verificati con il medesimo profilo di velocità del vento, di durata pari a 24
ore, sperimentalmente misurato a Palermo.
In Figura 9 sono riportati gli andamenti di potenza attiva e reattiva e l’energia prodotta con
le due metodologie di controllo. I risultati mostrano un incremento dell’energia generata pari al
20%, utilizzando il controllo GNG (8, 5 kW h) rispetto all’energia generata con l’algoritmo P&O
(7, 06 kW h). Come ulteriore parametro di confronto, si noti come il controllo GNG permette di
pag. 19/26
Figura 8: Caratteristica meccanica del generatore eolico
Figura 9: Confronto tra GNG e P&O
pag. 20/26
sfruttare, in media giornaliera, il 16% della potenza nominale del generatore, mentre l’algoritmo
P&O sfrutta solo il 13% della potenza nominale della macchina; infatti, il controllo P&O ,
rispetto al controllo GNG che sfrutta una conoscenza a priori della turbina, ha una velocità di
convergenza al MPP minore.
pag. 21/26
6
Conclusioni
L’utilizzo delle RES a bordo delle imbarcazioni, sebbene attualmente in uso, è una pratica
limitata all’uso sporadico come mero supporto alla ricarica degli accumulatori al piombo solitamente presenti a bordo. La carenza di tecnologia nei prodotti commerciali disponibili al
pubblico e l’utilizzo predominante dei ICE per la propulsione sono fra la cause di ciò.
È tuttavia possibile, ed anzi auspicabile, un maggiore utilizzo delle RES nelle imbarcazioni,
purché si rimettano in discussione le consolidate tecniche costruttive delle imbarcazioni, pensando dunque a design che rendano più efficaci e più semplici le installazioni dei generatori elettrici,
ed utilizzando l’energia elettrica come fonte primaria di energia, preferendo i combustibili fossili
come soluzione di backup.
La realizzazione di uno stadio di trasmissione di energia elettrica in corrente continua (DClink) è infatti necessario per permettere la coesistenza contemporanea di diverse RES. Tecniche
avanzate di controllo, come il MPPT, possono essere impiegate per massimizzare l’energia
prelevata dalle fonti rinnovabili e quindi minimizzare il consumo di combustibile tradizionale.
I risultati sperimentali hanno infatti mostrato come queste tecnologie avanzate di controllo
possano generare un consistente aumento dell’energie elettrica generata rispetto ai dispositivi
normalmente presenti in commercio, dotati di algoritmi di controllo obsoleti o del tutto carenti
di un sistema di controllo.
Infine, è opportuno notare come i dispositivi di generazione elettrica da RES attualmente
in commercio non siano dotati in nessun caso di apparati di coordinazione: il funzionamento
contemporaneo di più sorgenti di energia elettrica e la conseguente gestione dei flussi di energia
deve essere regolato da appositi algoritmi di controllo al fine, e.g., di mantenere costante la
tensione del DC-link, il corretto livello di carica degli accumulatori al piombo, il soddisfacimento
del carico al momento presente e quanti altri vincoli possano essere identificati nel normale
funzionamento dell’imbarcazione.
pag. 22/26
A
Generatori commerciali
Di seguito sono riportati i dati di alcuni generatori RES commerciali.
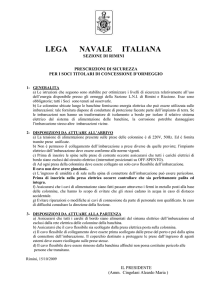
A.1
Pannello fotovoltaico Solbian SP100L
Pannello fotovoltaico realizzato in silicio monocristallino, inglobato in polimeri plastici ad alta
resistenza. Offre un rendimento pari all 22,5%, flessibilità, calpestabilità ed un peso pari a
circa 1/6 dei pannelli tradizionali, data l’assenza del vetro di protezione. Sono comunque
molto resistenti alla corrosione marina e sono specificatamente pensati per l’installazione sulle
imbarcazioni. Genera una potenza di picco pari a 02 W con una tensione nominale di 18 V . Il
pannello riportato in Figura 10 ha dimensioni 1110 × 550 × 2 mm, per un peso di 1, 5 kg.
(a) schema costruttivo
(b) aspetto reale
Figura 10: Pannello fotovoltaico SP100L
pag. 23/26
A.2
Ampair 100
Genera fino a 100 W a 12 V o 24 V . Il cavallo di battaglia Ampair, conosciuto dai navigatori
di tutti i mari e testato in migliaia di installazioni e continuamente migliorato fin dal 1973.
Silenziosissimo grazie alla turbina con 6 pale bilanciate; è costruito in alluminio e acciaio, con
guarnizioni a tenuta stagna e vernici marine. Opera ininterrottamente per anni in condizioni
estreme, fino a -30 ◦ C. Per il completamento dell’impianto, occorre un regolatore di carica
disponibile con una o tre uscite. Il montaggio avviene su un palo inox, alto circa 2, 5 m, da
adattare in funzione della struttura della barca su cui viene montato. Viene fornito anche un
braccio per il montaggio sull’albero di mezzana e uno stelo corto per il montaggio su spoiler.
(a) schema costruttivo
(b) diagramma di potenza
Figura 11: Generatore eolico Ampair 100
pag. 24/26
A.3
Rutland 913
Genera fino a 250 W a 12 V o 24 V . Generatore Eolico di semplice applicazione su palo. Costruito con materiali resistenti ad alta affidabilità, anche sui mari. Inizia a rendere con una velocità
del vento di appena 2, 2 m/s. Dispone di protezione automatica in prolungate condizioni di
vento forte, un unico modo di adattare le efficienti lame piane.
(a) schema costruttivo
(b) diagramma di potenza
Figura 12: Generatore eolico Rutland 913
pag. 25/26
Riferimenti bibliografici
[1] McKesson C.B. and Risley T.P. Hybrid Propulsion – What is it, and when does it make
sense for ship? In Marine Safety and Security Council, Proceedings of the Winter 2008–09
Conference, volume 65, pages 13–16, 2008.
[2] S. Daley, FA Johnson, JB Pearson, and R. Dixon. Active vibration control for marine
applications. Control Engineering Practice, 12(4):465–474, 2004.
[3] John C Payne. The marine electrical and electronics bible. Sheridan House, Inc., 1998.
[4] J. T. Pukrushpan, A. G. Stefanopoulou, and H. Peng. Control of Fuel Cell Power System:
Principles, Modeling and Analysis and Feedback Design. Advances in Industrial Control.
Springer – Verlag, London, August 2005.
[5] W. Friede, S. Raël, and B. Davat. Mathematical Model and Characterization of the Transient Behavior of a PEM Fuel Cell. IEEE Trans. Power Electron., 19(5):1234 – 1241,
September 2004.
[6] B. Fahimi. An Introduction to Modeling and Operation of PEM Fuel Cell Systems for
Automotive and Domestic Applications. Presentation in UTBM Workshop on the Fuel Cell
Systems, April 2008.
[7] Giovanni Bracco, Ermanno Giorcelli, and Giuliana Mattiazzo.
PROGETTARE, 347:53–55, 2010.
Energia dalle onde.
[8] Maria Carmela Di Piazza, Marcello Pucci, and Gianpaolo Vitale. Intelligent power conversion system management for photovoltaic generation. Sustainable Energy Technologies and
Assessments, 2:19–30, 2013.
[9] Maurizio Cirrincione, Marcello Pucci, and Gianpaolo Vitale. Growing neural gas (GNG)–
based maximum power point tracking for high–performance wind generator with an
induction machine. IEEE Trans. Ind. Appl., 47(2):861–872, 2011.
pag. 26/26