Le leggi della meccanica newtoniana
La meccanica si pone l’obiettivo di studiare il moto dei corpi materiali. Essa, pertanto, deve dapprima
individuare le grandezze fisiche rilevanti con le quali costruire, sulla base di esperimenti, relazioni capaci di
descrivere i fenomeni osservati ovvero le leggi del moto (metodo sperimentale).
a (t )
Le grandezze fisiche rilevanti che essa individua sono:
il vettore posizione r (t )
che fornisce la posizione del punto materiale al tempo t rispetto
al riferimento Oxyz (terna d’assi cartesiana ortogonale
destrorsa)
z
il vettore velocità v(t )
che descrive la direzione il verso e la rapidità del moto del punto
materiale al tempo t rispetto al riferimento Oxyz
r (t )
O
v (t )
y
x
il vettore accelerazione a (t )
che descrive la direzione il verso e la rapidità con cui varia la
velocità del punto materiale al tempo t rispetto al riferimento
Oxyz
F (t )
il vettore forza F (t )
che descrive la direzione il verso e la intensità dell’ente fisico che
nelle diverse situazioni produce il moto del punto materiale
(causa del moto) anch’esso espresso al tempo t e rispetto al
riferimento Oxyz
Prof. Nicola Semprini Cesari
Lezioni alla Fondazione Occhialini, Aprile-Maggio 2013
19
Nella formulazione newtoniana queste grandezze soddisfano tre leggi di natura empirica note con il
nome di
v
z
Principi della Dinamica
I) in un dato riferimento, un corpo materiale non soggetto ad
alcuna forza o permane in quiete o si muove di moto rettilineo
uniforme;
O
z
F ma
dove m è una costante positiva indipendente dal luogo e dal
tempo che esprime una proprietà intrinseca del corpo
materiale detta massa inerziale;
III)
due
corpi
materiali
in
mutua
interazione,
indipendentemente dalla natura della interazione, applicano
l’uno sull’altro forze dirette lungo la congiungente e di verso
contrario.
a (t )
x
II) in un dato riferimento, un corpo materiale che sia soggetto
ad una forza complessiva F si muove con una accelerazione a
che soddisfa la relazione
O
x
z
F 21 (t )
y
F (t )
y
F 12 (t )
O
y
x
Prof. Nicola Semprini Cesari
Lezioni alla Fondazione Occhialini, Aprile-Maggio 2013
20
Le grandezze fisiche della meccanica sono relative
La posizione nello spazio di un corpo materiale può essere
descritta solo riferendosi ad un altro corpo materiale assunto
come sistema di riferimento (solitamente una terna d’assi
cartesiana).
Come conseguenza anche la velocità, l’accelerazione e la forza
possono essere descritte solo in relazione ad un sistema di
riferimento.
Dunque il sistema di riferimento è necessario per descrivere le
grandezze fisiche della meccanica per cui la domanda è…
•
•
Con quale criterio deve essere scelto il SdR ?
I Principi della Dinamica valgono in tutti i possibili SdR ?
NOTA: quando una grandezza fisiche assume significato solo in relazione ad un
riferimento viene detta relativa (dal lat. tardo relativus, der. di relatus, p. pass. di referre
‘riportare’). Quando invece è indipendente dal riferimento viene detta assoluta (dal lat.
absolutus ‘libero da qualsiasi vincolo’). Dunque posizione, velocità e accelerazione sono
grandezze fisiche relative.
NOTA: In un sistema di assi cartesiano la posizione del corpo materiale risulta descritta da
una vettore rappresentato da una terna ordinata di numeri reali (dette componenti
cartesiane del vettore posizione). Cambiando sistema di riferimento le coordinate
cartesiane del vettore posizione cambiano indicando il carattere relativo della
grandezza.
Prof. Nicola Semprini Cesari
r ( x0 , y0 , z0 )
z
z0
O
x
Lezioni alla Fondazione Occhialini, Aprile-Maggio 2013
y0
y
x0
21
Riferimenti inerziali e non inerziali
Sperimentalmente si verifica che i Principi della Dinamica (PdD) valgono in alcuni sistemi di
riferimento (SdR) ma non in altri. Un esempio semplice che può chiarire questo punto è dato dal
seguente esperimento.
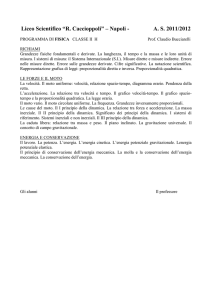
Esperimento della piattaforma
E’ data una piattaforma che a comando può ruotare attorno all’asse centrale. Sul piano della piattaforma e sul pavimento del
piazzale sono tracciati due riferimenti O’ ed O. Dal punto centrale della piattaforma l’osservatore O’, ad essa solidale, spinge un
corpo materiale verso l’esterno (radialmente). Il piano della piattaforma ed il corpo materiale sono lavorati in modo tale da
eliminare gli attriti per cui, una volta lanciato, la risultante delle forze agenti sul corpo materiale è nulla (la reazione vincolare
della piattaforma equilibra la forza peso).
La piattaforma è ferma
caso A
La piattaforma O’ non ruota. L’osservatore O’ lancia radialmente il
corpo materiale che ha risultante nulla delle forze applicate.
Esito dell’esperimento:
il corpo materiale si muove di moto rettilineo uniforme rispetto ad
entrambi i riferimenti. Dunque vale per entrambi il primo principio
della dinamica per cui concludiamo che O ed O’ sono riferimenti
inerziali.
caso B
La piattaforma O’ ruota. L’osservatore O’ lancia radialmente il
corpo materiale che ha risultante nulla delle forze applicate.
Esito dell’esperimento:
il corpo materiale si muove di moto rettilineo uniforme rispetto ad
O e di moto curvilineo rispetto ad O’. Dunque il primo principio
della dinamica vale per O e non per O’ per cui concludiamo che O è
inerziale e O’ è non inerziale.
Prof. Nicola Semprini Cesari
O’
O
La piattaforma ruota
O’
O
Lezioni alla Fondazione Occhialini, Aprile-Maggio 2013
22
Dati questi fatti è utile allora distinguere i sistemi di riferimento (SdR) in due categorie: quella dei
riferimenti inerziali i SdR dove valgono i principi della dinamica e dei riferimenti non inerziali i SdR
dove non valgono i principi della dinamica.
Naturalmente per stabilire se un SdR è inerziale o meno si deve saggiare in quel riferimento la
validità delle leggi meccaniche (di solito si saggia la validità del solo primo principio della dinamica)
per cui giungiamo al seguente
Criterio per stabilire se un riferimento è inerziale
dato un corpo materiale sul quale non siano applicate forze oppure, se applicate, abbiano risultante
nulla
• se il corpo materiale permane in quiete o si muove di moto rettilineo uniforme rispetto al
riferimento allora il riferimento è inerziale
• se il corpo materiale non permane in quiete e non si muove di moto rettilineo uniforme rispetto
al riferimento (ovvero si muove di moto accelerato) allora il riferimento è non inerziale
NOTA: sulla base di questo criterio concludiamo che nel caso A sia O che O’ sono inerziali mentre, nel caso B,
O è inerziale e O’ è non inerziale.
ES: Un’altra situazione è la seguente: un corpo materiale è appoggiato sul tavolino di un treno che si muove di
moto rettilineo uniforme rispetto a terra. L’analisi delle forze mostra che la risultante delle forze applicate è
nulla. Dato che il corpo materiale rimane fermo concludiamo che il riferimento è inerziale. Avvicinandosi in
stazione il treno decelera rispetto a terra. Le forze applicate al corpo materiale sono sempre le stesse e
dunque nulle tuttavia questo schizza in avanti. Concludiamo che il riferimento, ora, è non inerziale.
Si verifica anche: dato un riferimento inerziale S tutti i SdR in moto rettilineo uniforme
rispetto ad S sono inerziali e tutti SdR in moto accelerato rispetto ad S sono non inerziali.
Prof. Nicola Semprini Cesari
Lezioni alla Fondazione Occhialini, Aprile-Maggio 2013
23
Le cause fisiche della non inerzialità
Tralasciando alcune sottili difficoltà di ordine logico, il criterio appena discusso permette senz’altro
di stabilire la eventuale inerzialità di un riferimento ma, con tutta evidenza, non dice nulla sulle cause
fisiche che determinano la inerzialità o meno del riferimento: nell’esempio della piattaforma, ad
esempio, non viene spiegato per quale motivo O è un riferimento inerziale mentre O’ non lo è (caso B).
D’altra parte affermare che O’ è non inerziale perché ruota rispetto ad O non ha senso poiché è
chiaro che questa non può essere la causa fisica (il riferimento O non può essere causa fisica di
nulla). Fatte queste osservazioni, si pone allora il
problema di individuare quali siano le cause fisiche che determinano l’inerzialità o non inerzialità
di un riferimento.
Un suggerimento sulle possibili risposte a questo quesito può essere ottenuto
compiere l’esperimento della piattaforma nello spazio
immaginando di
Esperimento della piattaforma nello spazio
In questo caso l’esperimento potrebbe essere il seguente: ci sono due piattaforme O e O’ ferme tra loro e regolate in
modo tale che il corpo materiale, ora certamente senza forze applicate, si muova di moto rettilineo uniforme rispetto
ad O e O’. Con tale regolazione i riferimenti O e O’ sono inerziali. Poi si mette in rotazione O’ rispetto ad O per mezzo
di razzi contrapposti. Ora il corpo materiale si muove di moto rettilineo uniforme rispetto ad O e di moto curvilineo
rispetto ad O’. Dunque O rimane inerziale ma O’ diventa non inerziale.
In questo caso qual’è la causa fisica della non inerzialità del riferimento O’? La rotazione di O’
rispetto ad O appare ora completamente assurda poiché nello spazio ciò che si può davvero stabilire
è solo il moto relativo di O rispetto ad O’.
Prof. Nicola Semprini Cesari
Lezioni alla Fondazione Occhialini, Aprile-Maggio 2013
24
Da un punto di vista logico, rimangono allora solo due possibilità:
i)
ii)
la rotazione del riferimento rispetto allo ‘spazio’ in cui la piattaforma è immersa
la rotazione del riferimento rispetto alla ‘materia’ che circonda la piattaforma
Benchè logicamente possibili, è inevitabile sottolineare che una prova sperimentale diretta tesa a
selezionare una delle due opzioni è impossibile: potremo mai svuotare il cosmo di tutta la materia
(oppure mettere in rotazione tutta la materia del cosmo) per farvi poi un esperimento del tipo di
quello della piattaforma? Nonostante questo, storicamente il dibattito è stato accanito ed ha
condotto ad uno di quei problemi tormentati che pur accompagnando la fisica nel corso della sua
evoluzione sembrano non trovare mai una soluzione.
Prof. Nicola Semprini Cesari
Lezioni alla Fondazione Occhialini, Aprile-Maggio 2013
25
Newton, Mach ed Einstein
Il primo a porsi in modo chiaro questo problema fu Newton in un celebre passo:
L’esperimento della secchia rotante, da Philosophiae Naturalis Principia Mathematica, I. Newton
1687:
Se si fa girare su se stesso un vaso appeso ad una corda, fino a che la corda a forza di essere girata non si possa
quasi più piegare, e si mette poi in questo vaso dell'acqua e, dopo aver permesso all'acqua e al vaso di acquistare lo
stato di riposo, si lascia che la corda si srotoli, il vaso acquisterà un moto che durerà molto a lungo; all'inizio la
superficie dell'acqua contenuta nel vaso resterà piana, come era prima che la corda si srotolasse, ma in seguito, il
moto del vaso comunicandosi poco a poco nell'acqua contenuta, quest'acqua comincerà a girare, a elevarsi verso i
bordi ed a diventare concava, come ho esperimentato; quindi con l'aumentare del moto il livello dell'acqua crescerà
sempre più fino a che, concludendosi le sue rivoluzioni, in tempi uguali ai tempi impiegati dal vaso per fare un giro
completo, l'acqua sarà in riposo relativo rispetto al vaso.
Inizialmente si osserva il moto rotatorio del secchio mentre l’acqua, che tale movimento non ancora acquisito,
rimane in quiete con la superficie perfettamente piana. Gradualmente il moto viene comunicato dal secchio
all’acqua la quale, ruotando, comincia a salire lungo i bordi del secchio formando una superficie concava.
La forza di questo esempio sta nel fatto che, istintivamente, tendiamo ad interpretare il fenomeno assumendo il
riferimento solidale con il liquido il quale, essendo rotante e quindi non inerziale, è soggetto all’azione delle forze
inerziali (forza centrifuga) che tendono a fare risalire l’acqua lungo le pareti: le forze inerziali in questo esempio
sono terribilmente reali e presenti!
Chiaramente la causa di questo effetto risiede nel moto rotatorio dell’acqua ma la domanda
è: moto dell’acqua rispetto a chi? A quale riferimento ?
Notiamo subito che la causa non può essere il moto relativo dell’acqua rispetto al secchio dato che
tale moto, pur esistendo all’inizio, non produce alcun effetto. Newton si rese lucidamente conto
che la causa andava ricercata nel moto relativo dell’acqua rispetto a qualcosa d’altro. La
soluzione che propose Newton fu nella direzione dello spazio e non della materia.
Prof. Nicola Semprini Cesari
Lezioni alla Fondazione Occhialini, Aprile-Maggio 2013
26
Per comprendere la soluzione proposta da Newton dobbiamo immaginare di ripetere l’esperimento
della secchia togliendo un poco alla volta la materia dal cosmo fino a svuotarlo
completamente. Quale sarebbe in questo caso l’esito dell’esperimento? L’acqua, una volta in
rotazione, salirebbe ancora lungo le pareti del recipiente?
Come si è detto nessuno lo può sapere, tuttavia Newton immaginò che la risposta fosse affermativa
per cui dedusse che la causa del fenomeno doveva risiedere nel moto rotatorio dell’acqua, non
rispetto alla materia del cosmo, ma rispetto allo spazio vuoto del cosmo! Lo spazio vuoto dunque
acquisiva proprietà fisiche indipendenti dalla materia in esso contenuta e addirittura indipendenti
da tutto e da tutti:
Lo spazio Assoluto, da Philosophiae Naturalis Principia Mathematica, I. Newton 1687:
Lo spazio assoluto, per sua natura senza relazione ad alcunché di esterno, rimane sempre uguale ed immobile; lo
spazio relativo è una dimensione mobile o misura dello spazio assoluto, che i nostri sensi definiscono in relazione alla
sua posizione rispetto ai corpi, ed è comunemente preso come lo spazio immobile; cosí la dimensione di uno spazio
sotterraneo o aereo o celeste viene determinata dalla sua posizione rispetto alla terra. Lo spazio assoluto e lo
spazio relativo sono identici per grandezza e specie, ma non sempre permangono identici quanto al numero. Infatti
se la Terra, per esempio, si muove, lo spazio della nostra aria, che relativamente alla Terra rimane sempre identico,
sarà ora una parte dello spazio assoluto attraverso cui l’aria passa, ora un’altra parte di esso; e cosí muterà
assolutamente in perpetuo.
In sostanza la posizione newtoniana si può riassumere dicendo che egli vedeva nelle forze inerziali
la prova della esistenza di uno spazio assoluto. Il problema è che, essendo impensabile una prova
sperimentale di quanto affermava, la sua finiva per essere una posizione a priori non verificabile,
come tale esposta alle critiche più dure.
Prof. Nicola Semprini Cesari
Lezioni alla Fondazione Occhialini, Aprile-Maggio 2013
27
Nella stessa direzione va un altro celebre esperimento concettuale proposto da Newton nei
principia
Le sfere rotanti, da Philosophiae Naturalis Principia Mathematica, I. Newton 1687:
... if two globes kept at a given distance one from the other, by means of a cord that connects them, were revolved
about their common center of gravity; we might, from the tension of the cord, discover the endeavor of the
globes to recede from the axis of their motion. ... And thus we might find both the quantity and the determination
of this circular motion, even in an immense vacuum, where there was nothing external or sensible with which the
globes could be compared
L’idea è semplice: nel vuoto del cosmo, si immaginano due sfere di massa M ai capi di una funicella di lunghezza 2R
poste in rotazione attorno al centro di massa in modo tale che la funicella venga tesa. Come fa un osservatore a
capire se sta ruotando oppure no? Facile: basta che misuri i) la tensione della funicella, ii) la velocità di rotazione
della funicella nel suo riferimento. Se la relazione tra forza e velocità di rotazione è data da F=M 2 R allora,
valendo il secondo principio della dinamica si deduce che il riferimento è inerziale e dunque non rotante. In caso
contrario il sistema è rotante e si può stabilire anche la velocità di tale rotazione.
Il criterio è ineccepibile e fornisce un principio empirico chiaro per stabilire se un riferimento
sia inerziale o meno. Tuttavia è evidente che anche potendo stabilire senza alcun riferimento ad
altri corpi lo stato di rotazione del proprio riferimento questo non significa che gli altri corpi non
abbiano un ruolo: ancora una volta, per dirimere la questione, sarebbe necessario ripetere
l’esperimento dopo avere svuotato il cosmo di tutta la sua materia. Con questi soli elementi in
gioco la posizione newtoniana rimane a priori e non verificabile.
Per questo motivo numerosi fisici assunsero posizioni critiche che culminarono nell’attacco decisivo
del fisico-filosofo E. Mach (1838-1916), autore di in una fondamentale opera di revisione critica
dell’intera meccanica:
Prof. Nicola Semprini Cesari
Lezioni alla Fondazione Occhialini, Aprile-Maggio 2013
28
La critica dell’esperimento del secchio rotante, da La meccanica nel suo sviluppo
storico critico, E. Mach 1883 :
Nessuno, a nostro parere, è in grado di dire qualcosa sullo spazio assoluto e sul moto assoluto, che sono puri enti
ideali non conoscibili sperimentalmente. […] tutti i principi fondamentali della meccanica sono conoscenze
sperimentali su posizioni e moti relativi dei corpi. […] Nessuno è autorizzato a estendere questi principi al di là dei
limiti dell'esperienza; […] L'esperimento newtoniano del vaso pieno d'acqua sottoposto a moto rotatorio ci insegna
solo che la rotazione relativa dell'acqua rispetto alle pareti del vaso non produce forze centrifughe percettibili,
ma che tali forze sono prodotte dal moto rotatorio relativo alla massa della terra e agli altri corpi celesti. Non ci
insegna nulla di più.
Mach dunque, rovescia la posizione newtoniana sottolineando che, nell’esperimento del secchio,
ciò che davvero si osserva non è il moto dell’acqua rispetto allo spazio, ma il moto dell’acqua
rispetto alle altre masse del cosmo per cui questa sola può essere la causa fisica che fa
risalire l’acqua lungo le pareti del secchio stesso (in altri termini, se si fosse chiesto a Mach
cosa sarebbe successo qualora si fosse ripetuto l’esperimento del secchio, togliendo un poco alla
volta la materia dal cosmo fino a svuotarlo completamente, egli avrebbe risposto che alla fine non
si sarebbe osservata più la risalita dell’acqua lungo le sue pareti). Risultato immediato di questa
impostazione è il
Principio di Mach : sono inerziali i riferimenti privi di accelerazioni rispetto alle
stelle fisse.
che attribuisce la causa delle forze inerziali alla materia invece che allo spazio.
Prof. Nicola Semprini Cesari
Lezioni alla Fondazione Occhialini, Aprile-Maggio 2013
29
E’ necessario precisare che il termine ‘stelle fisse’ può certamente indicare le stelle visibili della
volta celeste le quali, a causa delle loro enormi distanze, si muovono in modo apprezzabile solo nel
corso di lunghissimi intervalli temporali. Ma non solo, esso deve essere inteso in senso più ampio
includendo qualunque sistema di corpi celesti distanti e tra loro indipendenti in modo tale che sia più
semplice evidenziare, sullo sfondo di questi, il proprio moto (è in questo modo che viene definito l’
International Celestial Reference Frame). Fatta questa premessa si noterà allora come anche il
principio di Mach costituisca un principio empirico chiaro per stabilire se un riferimento sia
inerziale o meno (se un riferimento ruota rispetto alle stelle fisse, come ad esempio la terra
rispetto alle stelle visibili, allora quel riferimento non è inerziale).
Nonostante questo, è tuttavia è evidente che anche potendo riferire lo stato di rotazione del
proprio riferimento alle stelle fisse questo non significa che le stelle fisse siano la causa fisica delle
forze inerziali: siamo dunque in una posizione antitetica a quella newtoniana che però soffre delle
stesse debolezze in quanto ancora una volta, per dirimere la questione, sarebbe necessario svuotare
il cosmo di tutta la sua materia oppure mettere in rotazione la materia del cosmo.
In realtà l’argomentazione machiana sembra più plausibile quella newtoniana poiché attribuisce la
causa delle forze inerziali a qualcosa di osservabile, alla materia del cosmo appunto, e non allo spazio
assoluto che non può essere osservato. Ad un esame più attento però risulta via via più chiaro che
tale impressione è legata più a posizioni filosofiche di impronta positivista che a ragioni fisiche
oggettive: senza l’introduzione di principi fisici nuovi risulta impossibile decidere tra le posizioni
di Mach e di Newton.
Di questo fatto si rese lucidamente conto A. Eistein il quale, affascinato dalla coerenza logica della
posizione di Mach la sostenne entusiasticamente (la rigorosa aderenza ai fatti della critica
machiana, scevra da tentazioni metafisiche, fu un esempio determinante per la creazione della
teoria della relatività ristretta), per ritornare però, negli anni tardi, sui propri passi:
Prof. Nicola Semprini Cesari
Lezioni alla Fondazione Occhialini, Aprile-Maggio 2013
30
La critica alle idee di Mach, da Uber den Ather; Verh. d. Schweiz. Naturf. Ges. 105, 85-93; A
Einstein 1924:
Invece che di “etere” si può parlare altrettanto bene di “qualità fisiche dello spazio”. […] ErnstMach […] tentò di
evitare l’ipotesi dell’ ”etere della meccanica”, cercando di ridurre l’inerzia all’interazione immediata tra la massa
considerata e tutte le restanti masse dell’universo. Questa concezione è logicamente possibile, ma come teoria
dell’azione a distanza per noi oggi non si può più prendere seriamente in considerazione. L’ etere meccanico da
Newton designato come “spazio assoluto”, dev’essere quindi da noi considerato come una realtà fisica.
Il problema sollevato da Einstein, per quanto riguarda l’impostazione machiana, può essere
facilmente compreso riprendendo l’esempio della piattaforma rotante. Quando lo sperimentatore
aziona il pulsante e mette in rotazione la piattaforma rispetto a terra, da subito si osserva un moto
curvilneo del corpo materiale lanciato radialmente rispetto a quel riferimento, da subito, quindi,
quel riferimento cessa di essere inerziale. Ciò esclude che le stelle fisse possano aver un ruolo
poichè sarebbe necessario un lungo tempo ad una qualche azione fisica per propagarsi dalle stelle
fisse alla piattaforma. L’unica possibilità, dunque, sarebbe quella di una azione a istantanea (azione a
distanza) la quale però, dopo la relatività ristretta, ‘non si può più prendere seriamente in
considerazione’.
Dunque, secondo l’ A.Einstein degli anni tardi, pur rappresentando un utile criterio empirico,
l’ipotesi di Mach, che riconduce la causa dell’inerzia all’azione delle stelle fisse, non può essere
accolta in quanto presuppone inaccettabile (almeno fino ad ora) azione a distanza. Come suggerì
Newton, non rimane allora che attribuire tale causa allo ‘spazio’, magari ad uno spazio più
fisico, capace di giocare un ruolo attivo nei processi, come il nome di ‘etere’ suggerisce:
Una posizione contemporanea, da Relativismo ed etere di Lorentz, relazione su invito, F. Selleri :
Che dire, oggi, dell’etere relativistico di Einstein? Beh, in primo luogo che il ritorno all’etere è un’operazione dettata
dal buon senso: lo spazio vuoto dotato di proprietà fisiche può benissimo essere chiamato «etere», […]
Prof. Nicola Semprini Cesari
Lezioni alla Fondazione Occhialini, Aprile-Maggio 2013
31
Principio di relatività galileiano
Nonostante non si siano ancora chiarite a fondo le circostanze fisiche che determinano l’inerzialità a meno di
un riferimento, risulta essere un punto fermo acquisito che attraverso la validità delle leggi meccaniche
possiamo solo distinguere tra sistemi di riferimento inerziali e non inerziali. Tale fatto a sua volta implica che
tutti i riferimenti inerziali siano tra loro equivalenti una proprietà delle leggi meccaniche di grande rilevanza:
Principio di Relatività Galileiano
per mezzo delle leggi meccaniche non è possibile distinguere
un sistema di riferimento inerziale tra gli infiniti possibili
z
r
secondo le leggi meccaniche tutti i riferimenti inerziali sono
equivalenti
per mezzo di esperimenti meccanici non è possibile
determinare lo stato di moto uniforme (ovvero la velocità) di
un riferimento inerziale
O
r'
V
y
x
secondo le leggi meccaniche non esiste un riferimento inerziale
privilegiato
le leggi meccaniche sono simmetriche rispetto al cambiamento
di riferimento inerziale
Rimandando altre considerazioni al seguito, sottolineiamo che il principio dichiara l’equivalenza dei
riferimenti inerziali limitatamente alle leggi meccaniche e non rispetto a tutte le leggi fisiche.
Prof. Nicola Semprini Cesari
Lezioni alla Fondazione Occhialini, Aprile-Maggio 2013
32
Poiché attraverso le leggi meccaniche non è possibile determinare lo stato di moto di un riferimento inerziale,
ne consegue anche che non sia possibile determinare nemmeno la direzione del moto e la posizione nello
spazio del riferimento. Possiamo allora affermare che devono valere le seguenti proprietà:
Isotropia ed Omogeneità delle leggi meccaniche
per mezzo delle leggi meccaniche non è possibile distinguere
l’orientamento e la posizione nello spazio di un riferimento
inerziale
z
secondo le leggi meccaniche tutti le orientazioni e le posizioni
nello spazio dei riferimenti inerziali sono equivalenti
attraverso esperimenti meccanici non è possibile determinare
l’orientazione e la posizione nello spazio di un riferimento
inerziale
O
r
r'
V
y
x
secondo le leggi meccaniche non esiste una orientazione ed
una posizione spaziale privilegiata del riferimento inerziale
le leggi meccaniche sono simmetriche rispetto alle rotazioni e
traslazioni del riferimento inerziale
Come prima sottolineiamo che il principio dichiara la simmetria ed isotropia dello spazio limitatamente alle
leggi meccaniche e non rispetto a tutte le leggi fisiche.
Prof. Nicola Semprini Cesari
Lezioni alla Fondazione Occhialini, Aprile-Maggio 2013
33
Il principio di relatività in meccanica
Limitatamente all’ambito della meccanica, che allora comunque copriva tutto ciò che poteva definirsi realtà
fisica, l’ impossibilità di stabilire lo stato di moto o di quiete di un osservatore (soggetto ad un moto tranquillo,
ovvero inerziale) è sicuramente nota dall’antichità:
La scuola alessandrina, in particolare Aristarco di Samo (310-230 a.C.), aveva anticipato molte delle conclusioni di Copernico
compresa la centralità del sole ed il moto terrestre attorno ad esso. Dunque doveva avere chiaro che tale moto non provocava
effetti osservabili per coloro che si trovavano sulla terra (non ne siamo certi poiché le opere originali sono perdute e
conosciamo le idee di Aristarco solo attraverso le citazioni di altre opere posteriori quali l’Arenario di Archimede).
Certamente tale concetto era molto chiaro a N. Copernico:
La inosservabilità dello stato di moto, da De revolutionibus orbium coelestium, N. Copernico 1543:
Fra cose che si muovono a uguale velocità verso il medesimo punto, non si percepisce alcun movimento […]
quando una nave viaggia nella bonaccia, i naviganti vedono tutte le cose che sono fuori di essa muoversi ad immagine del suo
movimento e, inversamente, credono se stessi e tutto ciò che hanno con sé in riposo […]
Ma che potremo dire, dunque, delle nubi e di tutte le altre cose sospese nell'aria, sia di quelle che tendono al basso come di
quelle che, invece, volgono verso l'alto ? Niente altro se non che non solo la Terra con l'elemento acqueo che le è unito si muove
in tal modo, bensì anche una parte non trascurabile dell'aria […]
E fu espresso in modo compiuto da Galileo:
La inosservabilità dello stato di moto, dal Dialogo sopra i due massimi sistemi del mondo, G. Galilei 1632:
[…] Rinserratevi nella maggiore stanza che sia sotto coperta di alcun gran navilio, e quivi fate d'aver mosche, farfalle e simili
animaletti volanti; siavi anco un gran vaso d'acqua, e dentrovi dei pescetti;
Prof. Nicola Semprini Cesari
Lezioni alla Fondazione Occhialini, Aprile-Maggio 2013
34
sospendasi anco in alto qualche secchiello che a goccia a goccia vadia versando dell'acqua in un altro vaso di angusta bocca, che
sia posto a basso: e stando ferma la nave, osservate diligentemente come quegli animaletti volanti con pari velocità vadano
verso tutte le parti della stanza; i pesci si vedranno andar notando indifferentemente per tutti i versi; le stille cadenti entreranno
tutte nel vaso sottoposto […]
Osservate che avrete diligentemente tutte queste cose, benchè niun dubbio ci sia che mentre 'l vassello sta fermo non debbano
succedere così, fate muover la nave con quanta si voglia velocità, chè (purchè il moto sia uniforme e non fluttuante […]) voi non
riconoscerete una minima mutazione in tutti li nominati effetti, nè da alcuno di quelli potrete comprendere se la nave cammina
oppure sta ferma […]
Ancor prima che la meccanica ricevesse il suo assetto definitivo da parte di I. Newton, Galileo intuì con
chiarezza una delle sue proprietà più profonde espressa oltretutto con un taglio concettuale assai moderno: i
riferimenti inerziali in moto tra loro con velocità uniforme sono tutti ‘equivalenti’ nel senso che gli
esperimenti meccanici forniscono, in tali riferimenti, gli stessi risultati e sono pertanto governati dalle
stesse leggi. Non siamo molto lontani, come si vede, dalla affermazione che le leggi meccaniche sono
simmetriche rispetto al cambiamento di riferimento inerziale, un modo assolutamente moderno di impostare
il problema!
Prof. Nicola Semprini Cesari
Lezioni alla Fondazione Occhialini, Aprile-Maggio 2013
35